
Method Article
Agulha de ultra-som tridimensional dica de rastreamento com um receptor de ultra-som de fibra óptica
Neste Artigo
Resumo
Precisa e eficiente visualização dos dispositivos médicos invasivos é extremamente importante em muitos procedimentos minimamente invasivos guiados por ultra-som. Aqui, um método para localizar a posição espacial de uma ponta da agulha em relação a sonda de ultra-som de imagem é apresentado.
Resumo
Ultra-som é frequentemente utilizada para orientadores procedimentos minimamente invasivos, mas Visualizar dispositivos médicos muitas vezes é um desafio com esta modalidade de imagem. Quando a visualização é perdida, o dispositivo médico pode causar trauma às estruturas de tecido críticas. Aqui, um método para controlar a ponta da agulha durante os procedimentos de ultra-som guiada por imagem é apresentado. Este método envolve o uso de um receptor de ultra-som de fibra óptica que é afixado dentro da cânula da agulha médica para se comunicar por meio de ultra-sons com a sonda de ultra-som externo. Esta sonda personalizada é composto por uma matriz de elemento central do transdutor e matrizes de elemento de lado. Além do convencional bidimensional (2D) modo-B ultra-sonografia fornecida pela matriz central, ponta de agulha (3D) tridimensionais de rastreamento é fornecida pelas matrizes de lado. Para ecografia de modo-B, é realizada uma sequência padrão transmit-receive com beamforming eletrônico. Para rastreamento Ultrassônico, transmissões de códigos de Golay ultra-som de matrizes o 4 lado são recebidas pelo sensor hidrofone, e posteriormente os sinais recebidos são decodificados para identificar a localização espacial da ponta da agulha no que diz respeito a ultra-sonografia sonda. Como uma validação preliminar deste método, inserções do par agulha/hidrofone foram realizadas em contextos clinicamente realistas. Este romance ultra-som de imagem/acompanhamento método é compatível com o atual fluxo de trabalho clínico, e fornece monitoramento confiável dispositivo durante inserções de agulha no plano e fora-de-avião.
Introdução
Precisa e eficiente localização dos dispositivos médicos invasivos é altamente desejada em muitos procedimentos minimamente invasivos guiados por ultra-som. Estes procedimentos são encontrados em contextos clínicos como anestesia regional e gestão de dor intervencionista1, oncologia intervencionista2e medicina fetal3. Visualização da ponta do dispositivo médico pode ser um desafio com ultra-sonografia. Durante inserções no plano, agulhas muitas vezes têm pouca visibilidade quando ângulos de inserção são íngremes. Além disso, durante as inserções do fora-de-avião, o eixo da agulha pode ser interpretado como a ponta da agulha. Quando a ponta da agulha não é visível por meio de ultra-sons, pode causar complicações por danificar estruturas críticas de tecido.
Vários métodos estão disponíveis para localizar dispositivos médicos durante a ultra-sonografia, mas uma confiança, que é compatível com o fluxo de trabalho clínico atual é altamente desejada. Ecogénica superfícies podem ser usadas para melhorar a visibilidade durante o ângulo acentuado inserções no plano4. Eletromagnética, sistemas de rastreamento podem ser usados durante inserções fora-de-avião, mas distúrbios do campo eletromagnético severamente podem degradar sua precisão. Ecografia 3D pode melhorar a visibilidade dos dispositivos médicos em certos procedimentos cardíacos e fetais quando eles são rodeados por fluidos5. No entanto, ultra-sonografia 3D não é amplamente utilizada para a orientação da agulha, em parte devido as complexidades associadas a interpretação da imagem.
Acompanhamento de ultra-som é um método que tem mostrado grande potencial para melhorar o dispositivo médico visibilidade6,7,8,9,10,11,12 ,13,14. Com o rastreamento Ultrassônico, o dispositivo médico tem um sensor de ultra-som incorporado ou transmissor que ativamente se comunica com o ultra-som externo, sonda de imagem. A posição do dispositivo médico pode ser identificada desde os ultra-som medido tempo-de-voos entre o sensor/transmissor de ultra-som incorporado e elementos diferentes do transdutor da sonda. Até à data, rastreamento Ultrassônico tem sido limitado a no plano de monitoramento, que restringiu consideravelmente seu uso clínico.
Aqui, uma demonstração de rastreamento ultra-sônica como 3D pode ser realizada com um ultra-som personalizado imagem sonda e um hidrofone de fibra óptica afixado dentro da cânula da agulha é fornecido (Figura 1). Esta sonda personalizada, que foi projetada pelos autores e fabricada externamente, é composto por um conjunto central de elementos do transdutor e quatro matrizes de lado. A matriz central é usada para ultra-sonografia 2D; as matrizes de lado, para 3D agulha ponta rastreando em concerto com o receptor de ultra-som de fibra óptica. Ele é mostrado como o receptor de ultra-som de fibra óptica pode ser posicionado e afixado dentro da cânula da agulha, como a precisão de rastreamento do sistema pode ser medidos sobre a bancada e como clínico validação pode ser realizada.
Protocolo
1. sistema Hardware
- O clínico ultra-som personalizado imagem sonda
- Crie um projecto de design para o layout dos elementos do transdutor a sonda personalizado que inclui matrizes centrais e laterais. Envie o desenho para o fabricante desta sonda.
- Com feedback do fabricante, crie um projeto detalhado para a sonda personalizado que inclui melhorias para as características de frequência do transdutor e geometrias (Figura 2).
Nota: Normalmente, o fabricante da sonda personalizado pode projetar os sistemas electrónicos, a carcaça da sonda e o conector da sonda para compatibilidade para um determinado tipo de sistema de imagem de ultra-som. O fabricante também pode incluir um interruptor de modo de operação (hardware) para determinar qual conjunto de 128 elementos foi dirigido pelo ultra-som sistema de imagem. No modo de imagem, destina-se a matriz central; no modo de rastreamento, são abordadas as matrizes de lado.
- A agulha de rastreamento
- Selecione um hidrofone de ultra-som de fibra óptica que é composto por uma fibra óptica de modo único com uma cavidade Fabry-Pérot na extremidade distal (diâmetro externo (OD): 150 µm).
Nota: Hidrofones que compõem uma fibra óptica de modo único com uma cavidade Fabry-Pérot na extremidade distal (OD: 150 µm), estão disponíveis comercialmente. Proximais à extremidade distal, fibras ópticas que são frequentemente utilizadas para telecomunicações têm uma camada de revestimento (OD: 125 µm), uma camada de buffer (OD: 250 µm) e uma jaqueta (OD: 900 µm). - Usando um bisturi, parcialmente Tire a jaqueta de 900 micrômetro ao longo do comprimento do hidrofone de fibra óptica, perto de sua extremidade distal, para expor a camada de buffer até que o hidrofone pode caber dentro da cânula da agulha.
Nota: Para robustez mecânica, é útil manter a camada protetora tampão/jaqueta na seção do cabo de fibra óptica que é proximal ao conector Luer. Tenha cuidado com manipulação seção frágil da fibra após o revestimento é removido, antes de que é protegido pela cânula da agulha. - Apor a agulha médica horizontalmente para um estágio de tradução horizontal manual e visualize a ponta da agulha com um microscópio estéreo, com o eixo óptico do microscópio alinhado horizontalmente e perpendicular a agulha. Se necessário, gire a agulha sobre seu eixo, para que a superfície do bisel da agulha pode ser vista com o microscópio.
- Com a extremidade distal da agulha em vista ao microscópio, insira o receptor de ultra-som de fibra óptica através da cânula de um adaptador Tuohy-Borst braço lateral e, posteriormente, através do conector Luer da agulha até a região de sensoriamento de hidrofone é apenas proximal à superfície do bisel da agulha. Nesta fase, o adaptador de braço lateral não deve ser ligado na agulha. Apor o hidrofone para a fase de tradução (poliimida fita funciona bem) para evitar seu movimento dentro da agulha.
- Apor o hidrofone para a fase de tradução com fita de poliimida para evitar movimento do dispositivo dentro da agulha.
- Verticalmente a apor um microlitro 20-Pipete para a fase de tradução vertical com a ponta virada para baixo e usar ambos os estágios de translação horizontal e vertical para posicionar a micropipeta dica até que seja adjacente para o hidrofone de fibra óptica e cerca de 0,5 mm proximal à região de sensoriamento na extremidade distal.
- Coloque uma gota de adesivo óptico na extremidade proximal da micropipeta e ajuste a agulha para permitir um caminho direto da ponta da micropipeta para o receptor de ultra-som de fibra óptica.
- Em seguida, use uma seringa de 10 mL para aplicar pressão na extremidade proximal da micropipeta gradualmente dispensar o adesivo do distal para o receptor de ultra-som de fibra óptica, tendo o cuidado de evitar a aplicação de adesivo para a região de detecção ou oclusão da cânula, e Ilumine a ponta da agulha com luz ultravioleta até o adesivo óptico está curado.
- Selecione um hidrofone de ultra-som de fibra óptica que é composto por uma fibra óptica de modo único com uma cavidade Fabry-Pérot na extremidade distal (diâmetro externo (OD): 150 µm).
2. sistema integração
- Ligue o hidrofone para seu console óptico.
Nota: Consoles ópticos que fornecem um sinal analógico de tensão proporcional à pressão recebida estão disponíveis comercialmente. - Conecte o ultra-som personalizado sonda para o console do ultra-som de imagem.
- Realize aquisições intercaladas de pulsos de ultra-som codificado e imagens do ultra-som de modo-B para acompanhamento de10,14. Para aquisição de imagens de ultra-som modo-B, realizar pulso-eco sequências com os elementos da matriz central de transmissão-recepção. Use o interruptor de hardware para controlar se os elementos de matriz de lado ou os elementos da matriz central são acessados.
- Digitalize os sinais do hidrofone e os sinais de sincronismo de acordo com o começa de transmissões de ultra-som simultaneamente com uma placa de aquisição (DAQ) de dados.
- Processo e exibir os sinais adquiridos a partir do pulso-eco de transmissão-recepção sequências, para obter imagens de ultra-som modo-B. Além disso, processar e exibir os sinais de hidrofones para localizar o receptor de ultra-som de fibra óptica em relação a sonda personalizado. Para a última tarefa, os algoritmos são descritos por Xia et al. 12 , 14
- Sobrepor os locais de ponta de agulha para as imagens do ultra-som de modo-B. Para exibir 3D rastreando informações em um display de imagem de ultra-som 2D, a posição da ponta da agulha (coordenadas lateral e profundidade) pode ser indicada com uma cruz; a distância de fora-de-avião e lado da imagem de avião, com o tamanho e a cor desta cruz, respectivamente.
3. pré-clínica validação
- Selecione o modo de operação usando o interruptor a sonda de ultra-som de imagem.
- Adicione gel de ultra-som para a sonda de ultra-som personalizada de imagens.
- Prepare um fantasma de ultra-som fetal, acrescentando água para imitar o líquido amniótico.
- Utilizando a ultra-sonografia de modo-B, identifica o líquido amniótico no fantasma como o destino de inserção.
Nota: O destino de inserção dependerá do contexto; poderia incluir uma região específica do tecido para diagnóstico ou terapêutica durante um procedimento clínico, ou um local designado em um imagem fantasma para imitar uma região de tecido. - Introduza a agulha em direção a meta de inserção. Durante a inserção, alternar entre os modos de operação (de imagem e rastreamento) continuamente, usando o interruptor da sonda personalizado.
Resultados
O animal experimento foi conduzido em conformidade com os regulamentos de UK Home Office e a orientação para o ato de operação dos animais (procedimentos científicos) (1986). A ovelha foi abrigada em conformidade com diretrizes de UK Home Office relativas ao bem-estar dos animal; os experimentos foram realizados sob o Home Office projeto licença 70/7408 intitulado "Pré-natal terapia com células-tronco e a transferência de genes". Aprovação ética para experimentos de ovelhas foi fornecida pela University College London, Reino Unido e as placas de revisão ética de bem-estar Animal do Royal Veterinary College.
Com a aprovação da ética no lugar, utilizou-se uma ovelha prenha para validação pré-clínica em vivo . Depois de receber supositórios intravaginal de progesterona por 2 semanas, as ovelhas foram tempo-acoplado para induzir a ovulação, conforme descrito por David et al. 34 em 130 dias de gestação, uma ovelha grávida estava a passar fome durante a noite com uma ovelha companheira grávida. A ovelha então submetida à anestesia geral, induzida com tiopental sódico 20mg kg-1 por via intravenosa e manteve-se com 2-2,5% de isoflurano em oxigênio após intubação através de um ventilador. Intubação correta foi confirmada por ouvir os pulmões bilateralmente. Anestesia foi confirmada pela avaliação do reflexo corneal. Saturação de oxigênio foi mensurada continuamente, usando um monitor de saturação na língua ou na orelha. A ovelha foi colocada nas costas em semi-recundancy e uma sonda nasogástrica foi passada para facilitar a passagem do conteúdo do estômago. Um lubrificante ocular foi aplicado aos olhos para mantê-los húmida. Após o recorte do Tosão, abdômen da ovelha foi duplo limpo com um desinfectante da pele. Gel de acoplamento estéril foi aplicada no abdômen e exame ultra-sonográfico foi usado para confirmar a idade gestacional da ovelha34 e avaliar mentira fetal. No final da cirurgia o animal humanamente foi morto com uma overdose de tiopental sódico (40 mg kg-1 por via intravenosa).
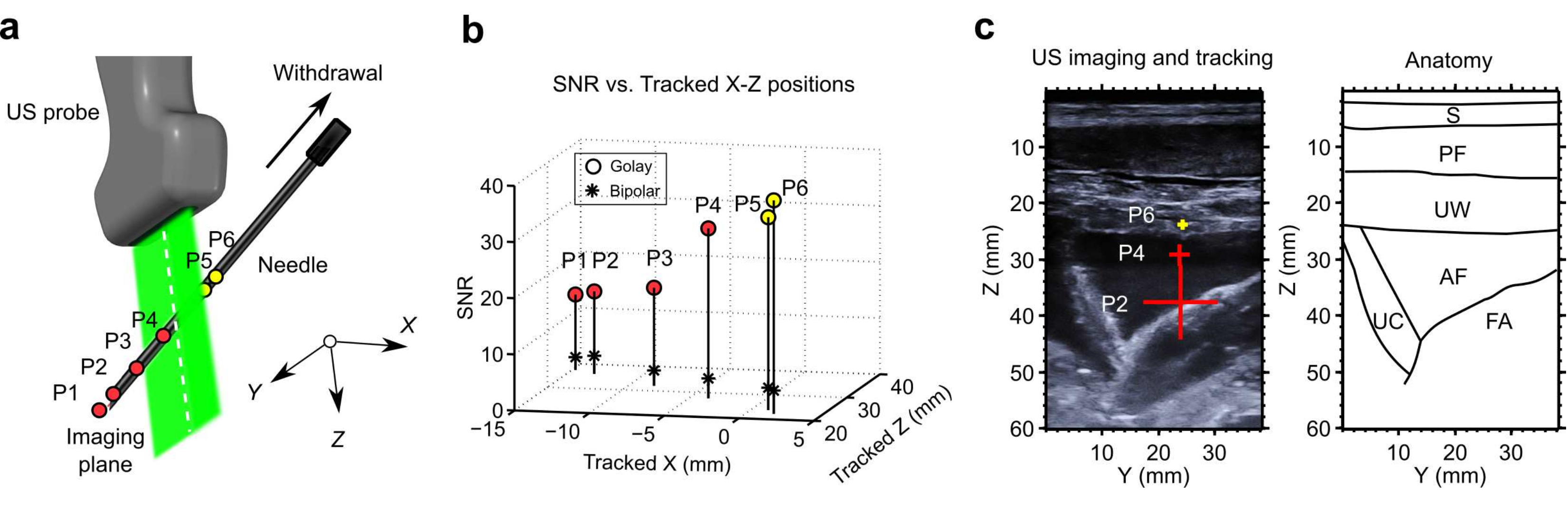
O praticante (ALD) identificou o cordão umbilical como um alvo. Uma agulha foi inserida na cavidade uterina, e a ponta foi rastreada ao longo de uma trajetória que alcançou uma distância para fora-de-avião de 15 mm e uma profundidade de 38 mm (Figura 3). Codificação de Golay melhorou o SNR, com um aumento de 7.5-fold em relação a excitação bipolar convencional (Figura 3B). As posições de ponta de agulha controladas 3D foram sobrepostas na imagem ultra-som 2D usando cruzes com larguras indicativas do fora-de-avião distância e cores indicativas da imagem (passo 2.6) (Figura 3).

Figura 1: visão geral do sistema. Um ultra-som (US) de imagem/acompanhamento sonda permite tanto 2D imagem latente dos EUA e agulha 3D de rastreamento. É dirigido por um scanner de E.U. que fornece controle sobre o acompanhamento transmissões de elemento. Um interruptor permite a seleção eletrônica dos elementos do transdutor para alternar entre dois modos de operação: com a matriz central de imagem e rastreamento com matrizes de lado. Um receptor de ultra-som hidrofone óptica (FOH) fibra, posicionado dentro do lúmen da agulha 20g, recebe as transmissões das matrizes de lado. T/r: transmitir/receber; LT: gatilho de linha; FT: gatilho quadro; PC: computador de pessoal; DAQ: placa de aquisição de dados. Esta figura e a legenda são reproduzidos com permissão de Xia, w. et al. 14. clique aqui para ver uma versão maior desta figura.
{kind=link}

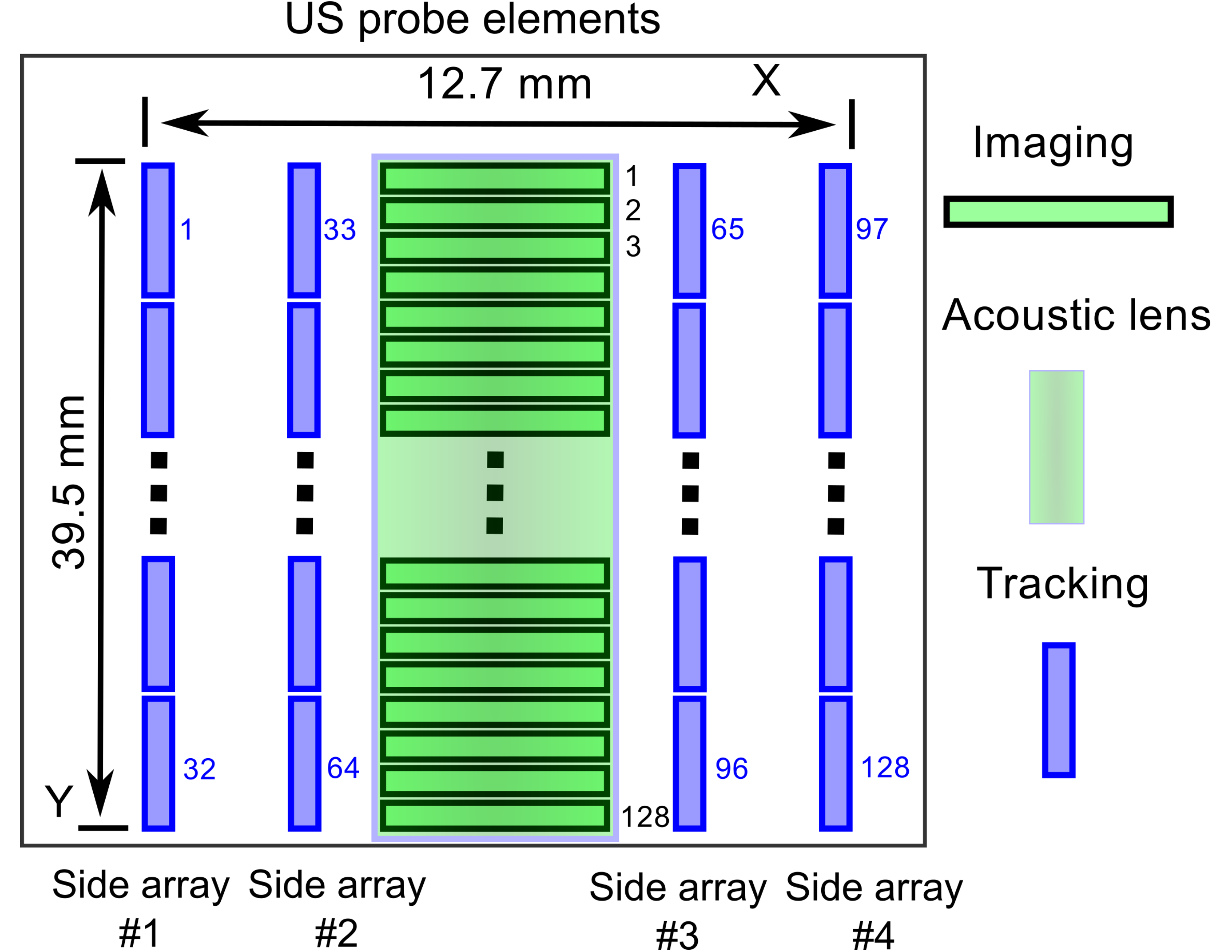
Figura 2: layout de elemento transdutor de ultra-som personalizado imagem sonda. Uma matriz central com 128 elementos e uma lente acústica permite-nos de imagens. Matrizes de lado, com 32 elementos por linha e 128 elementos no total, ativar o rastreamento de agulha 3D. Esta figura e a legenda são reproduzidos com permissão de Xia, w. et al. 14. clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 3: Inserção de agulha com 3D acompanhamento na vivo. (A) controladas posições de ponta de agulha (círculos: P1-P6) obtidos durante uma inserção na cavidade uterina de uma ovelha grávida. (B) taxas de sinal-ruído (SNRs) dos sinais de controle (imagem avião: X = 0). (C) a sobreposição de 3 das posições controladas em uma imagem 2D de E.U. que foi adquirida com a matriz central. O comprimento de ponta a ponta de cada cruz correspondeu à distância para fora-de-avião; a cor (vermelho/amarelo) correspondia ao lado do avião de imagem. As principais características anatômicas são retratadas com contornos (à direita). S: pele; PF: gordura percutânea; UW: parede útero; AF: o líquido amniótico; UC: cordão umbilical; FA: abdômen fetal. Esta figura e a legenda são reproduzidos com permissão de Xia, w. et al. 14. clique aqui para ver uma versão maior desta figura.
{kind=link}
Discussão
Aqui vamos demonstrar como 3D ultra-sônica rastreamento pode ser executado com um ultra-som personalizado imagem sonda e um hidrofone de fibra óptica integrados dentro de uma agulha. Do ponto de vista clínico tradução, vários aspectos da sonda personalizado desenvolvido neste estudo são atraentes. Seu tamanho compacto é adequado para uso em espaços pequenos como a axila onde manobras volumosos de imagem sondas 3D é desafiador. Uma limitação da aplicação do rastreamento de ultra-som 3D apresentado aqui é que a comutação manual foi necessária para alternar entre a imagem e modos de controle. No futuro implementações, essa comutação pode ser feito diretamente pelo sistema de imagem de ultra-som.
O hidrofone de fibra óptica é bem adequado para agulha ultra-sônico de rastreamento. Seu alto grau de miniaturização e flexibilidade permitem a sua integração em dispositivos médicos com pequenas dimensões laterais. Sua largura de banda de frequência ampla16 permite a compatibilidade com sondas de ultrassom clínicos diferentes. Além disso, sua omnidirectionality16 permite rastreamento agulhas que são inseridas em uma grande variedade de ângulos. Finalmente, sua imunidade a distúrbios EM campos e objectos metálicos torna as configurações mais adequadas para clínica em contraste com o rastreamento EM. Para atingir a maior sensibilidade de detecção de ultra-som, uma cavidade de Pérot-Fabry plano-côncava poderia ser usada em futuras17. Em última análise, acompanhamento de ultra-som poderia ser combinado com outras modalidades em uma única fibra óptica, tais como reflectância espectroscopia18,19,20,21,22, 23, espectroscopia24Raman, tomografia de coerência óptica25,26e fotoacústico imagem27,28,29,30 , 31 , 32 , 33.
Rastreamento ultra tem limitações que são compartilhadas com ultra-sonografia. Primeiro, heterogeneidades tecido impactará negativamente ultra-sônico de acompanhamento; variações espaciais na velocidade do som de tecido irão diminuir a precisão de rastreamento, como demonstrado por simulações numéricas em um anterior estudo14. Estruturas anatômicas, segunda que são altamente reflexivas para ondas de ultra-som, tais como estruturas ósseas ou cavidades de ar, provavelmente não são compatíveis com o acompanhamento de ultra-som. No futuro, estudos, a posição de ponta de agulha obtido com outras modalidades de imagem, tais como C-braço de rotação 3D tomografia computadorizada por raio-x, poderiam ser usados para avaliar a precisão de rastreamento ultra 3D em tecidos heterogêneos na vivo.
Apesar de recentes avanços na ultra-sonografia, rastreamento preciso e eficiente manipulação de dispositivos médicos, sob a orientação dessa modalidade permanecem um desafio, mesmo para os profissionais especializados. Comunicação ativa entre sondas de ultra-som externo e dispositivos médicos, conforme mostrado aqui, pode melhorar a eficiência e segurança processual. Estas melhorias poderiam facilitar grandemente a adopção da ultra-sonografia no lugar de fluoroscopia de raio-x em diversos contextos clínicos, tais como inserções espinhais para tratamento da dor intervencionista. O sistema desenvolvido neste estudo permite o acompanhamento de ultra-som 3D e 2D ultra-sonografia com uma sonda de ultra-som compacto. Poderia melhorar procedimentos minimamente invasivos guiados por ultra-som, fornecendo a localização exata da ponta da agulha dentro de fluxo de trabalho clínico atual.
Divulgações
Os autores declaram que não há nenhum conflito de interesses.
Agradecimentos
Este trabalho foi apoiado por uma engenharia inovadora para prêmio de saúde por parte da Wellcome Trust (n. º WT101957) e Conselho (EPSRC) (n. º de pesquisa da engenharia e ciências físicas NS/A000027/1), por um centro Wellcome/EPSRC prêmio [203145Z/16/Z & NS/A000050/1], por uma concessão a partir do Conselho Europeu de investigação (Grant no. ERC-2012-STG, a proposta 310970 MOPHIM) e por um primeiro EPSRC Grant (n. º EP/J010952/1). ALD é suportado pelo UCL/UCLH NIHR abrangente biomédica centro de investigação. Os autores são gratos ao pessoal do Royal Veterinary College por sua valiosa assistência com experimentos na vivo .
Materiais
| Name | Company | Catalog Number | Comments |
| Ultrasound imaging system | BK ultrasound (ultrasonix) | SonixMDP | |
| Custom ultrasound probe | Vermon | ||
| Spinal needle | Terumo | 20 gauge | |
| Fibre-optic hydrophone | Precision Acoustics | ||
| Fibre-optic stripping tool | Thorlabs | FTS4 | |
| Stereo microscope | Leica Microsystems | Z16APO | |
| Tuohy-Borst Sidearm adapter | Cook Medical | PTBYC-RA | |
| Pipette | Eppendorf | 100 mL | |
| Micropipette tip | Eppendorf | 20 µL | |
| Ultraviolet optical adhesive | Norland Products | NOA81 | |
| Syringe | Terumo | 10 mL | |
| Ultraviolet light source | Norland Products | Opticure 4 Light Gun | |
| Data acquisiton card | National Instruments | USB-5132 | |
| Articulated arm | CIVCO | 811-002 | |
| Thiopental sodium | Novartis Animal Health UK | Thiovet | |
| Isoflurane | Merial Animal Health | Isoflurane-Vet | |
| Ocular lubricant | Allergan, Marlow, UK | Lacri-Lube | |
| Skin lubricant | Adams Healthcare, Garforth, UK | Hibitane 2% |
Referências
- Chin, K., Perlas, A., Chan, V., Brull, R. Needle visualization in ultrasound-guided regional anesthesia: challenges and solutions. Reg. Anesth. Pain Med. 33 (6), 532-544 (2008).
- Sridhar, A. N., et al. Image-guided robotic interventions for prostate cancer. Nat. Rev. Urol. 10, 452-462 (2013).
- Daffos, F., Capella-Pavlovsky, M., Forestier, F. Fetal blood sampling during pregnancy with use of a needle guided by ultrasound: A study of 606 consecutive cases. Am. J. Obstet. Gynecol. 153 (6), 655-660 (1985).
- Hebard, S., Graham, H. Echogenic technology can improve needle visibility during ultrasound-guided regional anesthesia. Reg. Anesth. Pain Med. 36 (2), 185-189 (2011).
- Abayazid, M., Vrooijink, G. J., Patil, S., Alterovitz, R., Misra, S. Experimental evaluation of ultrasound-guided 3D needle steering in biological tissue. Int. J. Comput. Assist. Radiol. Surg. 9 (6), 931-939 (2014).
- Nikolov, S. I., Jorgen, A. J. Precision of needle tip localization using a receiver in the needle. IEEE Int Ultrason Symp. , (2008).
- Mung, J., Vignon, F., Jain, A. A non-disruptive technology for robust 3D tool tracking for ultrasound-guided interventions. MICCAI 2011. , 153-160 (2011).
- Guo, X., Tavakoli, B., Kang, H. J., Kang, J. U., Etienne-Cummings, R., Boctor, E. M. Photoacoustic active ultrasound element for catheter tracking. Proc. SPIE. 8943, 89435M(2014).
- Xia, W., et al. In-plane ultrasonic needle tracking using a fiber-optic hydrophone. Med. Phys. 42 (10), 5983-5991 (2015).
- Xia, W., et al. Coded excitation ultrasonic needle tracking: An in vivo study. Med. Phys. 43 (7), 4065-4073 (2016).
- Xia, W., et al. Interventional photoacoustic imaging of the human placenta with ultrasonic tracking for minimally invasive fetal surgeries. MICCAI 2015. , 371-378 (2015).
- Xia, W., et al. 3D Ultrasonic Needle Tracking with a 1.5D Transducer Array for Guidance of Fetal Interventions. MICCAI 2016. , 353-361 (2016).
- Xia, W., et al. Fiber optic photoacoustic probe with ultrasonic tracking for guiding minimally invasive procedures. Proc. SPIE. 9539 95390K. 9539, 95390K(2015).
- Xia, W., et al. Looking beyond the imaging plane: 3D needle tracking with a linear array ultrasound probe. Sci. Rep. 7, 3674-3682 (2017).
- Xia, W., et al. Ultrasonic Needle Tracking with a Fibre-Optic Ultrasound Transmitter for Guidance of Minimally Invasive Fetal Surgery. MICCAI 2017. , 637-645 (2017).
- Morris, P., Hurrell, A., Shaw, A., Zhang, E., Beard, P. C. A Fabry-Pérot fiber-optic ultrasonic hydrophone for the simultaneous measurement of temperature and acoustic pressure. J. Acoust. Soc. Am. 125 (6), 3611-3622 (2009).
- Zhang, E. Z., Beard, P. C. Characteristics of optimized fiber-optic ultrasound receivers for minimally invasive photoacoustic detection. Proc. SPIE. 9323, 932311(2015).
- Desjardins, A. E., et al. Epidural needle with embedded optical fibers for spectroscopic differentiation of tissue: ex vivo feasibility study. Biomed. Opt. Exp. 2 (6), 1452-1461 (2011).
- Desjardins, A. E., et al. Needle stylet with integrated optical fibers for spectroscopic contrast during peripheral nerve blocks. J. Biomed. Opt. 16 (7), 077004(2011).
- Rathmell, J. P., et al. Identification of the Epidural Space with Optical Spectroscopy: An In Vivo Swine Study. Anesthesiology. 113 (6), 1406-1418 (2010).
- Balthasar, A., et al. Optical Detection of Vascular Penetration during Nerve Blocks: An in vivo Human. Reg. Anesth. Pain Man. 37 (1), 3-7 (2012).
- Brynolf, M., et al. Optical Detection of the Brachial Plexus for Peripheral Nerve Blocks: An in vivo Swine Study. Reg. Anesth. Pain Man. 36 (4), 350-357 (2011).
- Soto-Astorga, R. P., West, S. J., Putnis, S., Hebden, J. C., Desjardins, A. E. Epidural catheter with integrated light guides for spectroscopic tissue characterization. Biomed. Opt. Express. 4 (11), 2619-2628 (2013).
- Anderson, T. A. Raman Spectroscopy Differentiates Each Tissue From the Skin to the Spinal Cord: A Novel Method for Epidural Needle Placement? Anesthesiology. 125 (4), 793-804 (2016).
- Xie, Y., Bonin, T., Löffler, S., Hüttmann, G., Tronnier, V., Hofmann, U. G. Coronal in vivo forward-imaging of rat brain morphology with an ultra-small optical coherence tomography fiber probe. Phys. Med. & Biol. 58 (3), 555-568 (2013).
- Xie, Y., Harsan, L. A., Bienert, T., Kirch, R. D., Von Elverfeldt, D., Hofmann, U. G. Qualitative and quantitative evaluation of in vivo SD-OCT measurement of rat brain. Biomed. Opt. Express. 8 (2), 593-607 (2017).
- Xia, W., et al. Performance characteristics of an interventional multispectral photoacoustic imaging system for guiding minimally invasive procedures. J. Biomed. Opt. 20 (8), 086005(2015).
- Mari, J. -M., Xia, W., West, S. J., Desjardins, A. E. Interventional multispectral photoacoustic imaging with a clinical ultrasound probe for discriminating nerves and tendons: an ex vivo pilot study. J. Biomed. Opt. 20 (11), 110503(2015).
- Xia, W., et al. An interventional multispectral photoacoustic imaging platform for the guidance of minimally invasive procedures. Proc. SPIE. 9539, 95390D(2015).
- Xia, W., West, S. J., Nikitichev, D. I., Ourselin, S., Beard, P. C., Desjardins, A. E. Interventional multispectral photoacoustic imaging with a clinical linear array ultrasound probe for guiding nerve blocks. Proc. SPIE. 9708, 97080C1-97080C6 (2016).
- Gandhi, N., Allard, M., Kim, S., Kazanzides, P., Bell, M. A. L. Photoacoustic-based approach to surgical guidance performed with and without a da Vinci robot. J. Biomed. Opt. 22 (12), 121606(2017).
- Bell, M. A. L., Kuo, N. P., Song, D. Y., Kang, J. U., Boctor, E. M. In vivo visualization of prostate brachytherapy seeds with photoacoustic imaging. J. Biomed. Opt. 19 (12), 126011(2017).
- Piras, D., Grijsen, C., Schütte, P., Steenbergen, W., Manohar, S. Photoacoustic needle: minimally invasive guidance to biopsy. J. Biomed. Opt. 18 (7), 070502(2013).
- David, A. L., et al. Clinically applicable procedure for gene delivery to fetal gut by ultrasound-guided gastric injection: toward prenatal prevention of early-onset intestinal diseases. Hum. Gene Ther. 17 (7), 767-779 (2006).
Reimpressões e Permissões
Solicitar permissão para reutilizar o texto ou figuras deste artigo JoVE
Solicitar PermissãoThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados