
Method Article
Uma ZIF automatizado baseado aparelhos e protocolo para análise de tomada de decisão baseada em atraso e esforço em roedores em movimento livre
Neste Artigo
Resumo
Este artigo apresenta um aparelho automatizado de ZIF que inventamos, e um protocolo baseado no aparelho para análise de tomada de decisão baseada em atraso e tomada de decisão baseada no esforço em roedores em movimento livre.
Resumo
Muitos pacientes neurológicos e psiquiátricos demonstram dificuldades e/ou déficits na tomada de decisão. Modelos de roedores são úteis para produzir uma compreensão mais profunda das causas neurobiológicas subjacentes os problemas de tomada de decisão. Uma tarefa de ZIF com base de custo-benefício é usada para medir a tomada de decisão em que roedores escolher entre um braço de alta recompensa (HRA) e um braço de baixa recompensa (LRA). Existem dois paradigmas da tarefa de tomada de decisão de ZIF, uma em que o custo é um tempo de atraso e outra em que é o esforço físico. Ambos os paradigmas requerem uma gestão tediosa e trabalho intensiva de animais experimentais, várias portas, recompensa de pelotas e gravações de escolha do braço. No trabalho atual, nós inventamos um aparelho baseado no tradicional ZIF com automação completa para entrega da pelota, gerenciamento de porta e gravações de escolha. Esta configuração automatizada pode ser usada para a avaliação de ambas as decisões baseadas em atraso e esforço em roedores. Com o protocolo descrito aqui, nosso laboratório investigou os fenótipos de tomada de decisões de vários ratos geneticamente modificados. Os dados representativos, mostramos que os ratos com ablated habenular medial mostraram aversões de atraso e o esforço e tendiam a escolher a recompensa imediata e sem esforço. Esse protocolo ajuda a diminuir a variabilidade causada pela intervenção do experimentador e para melhorar a eficiência do experimento. Em adição, sonda de silicone crônica ou gravação de microeletrodos, imagem de fibra óptica e/ou manipulação de atividade neural pode ser facilmente aplicada durante a tarefa de tomada de decisão usando a configuração descrita aqui.
Introdução
Os seres humanos e outros animais avaliar o custo (incluindo o atraso, o esforço e risco) para obter uma recompensa e então tomem a sua decisão de escolher um determinado curso de ação. Défices de tomada de decisão aparecem em inúmeras doenças neuropsiquiátricas, incluindo esquizofrenia (SZ), atenção e hiperatividade (TDAH), transtorno obsessivo-compulsivo (TOC), doença de Parkinson (PD) e vício1. Estudos em humanos e macacos revelaram esse cérebro chave várias regiões estão envolvidas na decisão tomada2,3,4. Embora primatas envolver-se em ingredientes de decisão mais complicados, roedores foram relatados para ser capaz de tomar decisões adaptativas para sobreviver em um ambiente onde a contingências recompensa mudam com frequência. Além disso, os mecanismos de circuito neural e mecanismos moleculares subjacentes a tomada de decisão podem ser aprofundados em modelos do rato devido à disponibilidade de chemogenetic ferramentas, ferramentas de optogenetic e ratos geneticamente modificados. Existem várias tarefas utilizadas na avaliação de comportamentos de tomada de decisão dos roedores, incluindo a tarefa de conjunto deslocar a atenção, a tarefa de ZIF esforçada ou baseados em atraso, a tarefa gambling de Iowa, a reversão da discriminação visual aprendizagem tarefa5, etc. Protocolos de custo-benefício de ZIF análoga foi originalmente desenvolvidos pelo grupo de Pierre6 e têm sido utilizados para examinar os efeitos de dois tipos de custo de decisão (atraso e esforço) na enciclopédia em movimento roedores7,8, 9,10. A vantagem especial desta tarefa é que os animais não têm de ser treinado para pressionar as alavancas ou cavar em uma tigela. Em vez disso, os animais fazem uma escolha entre uma alta recompensa alta custo opção em um braço (HRA) ou uma recompensa baixa opção de baixo custo no outro braço (LRA). Portanto, esta tarefa é muito mais fácil de executar.
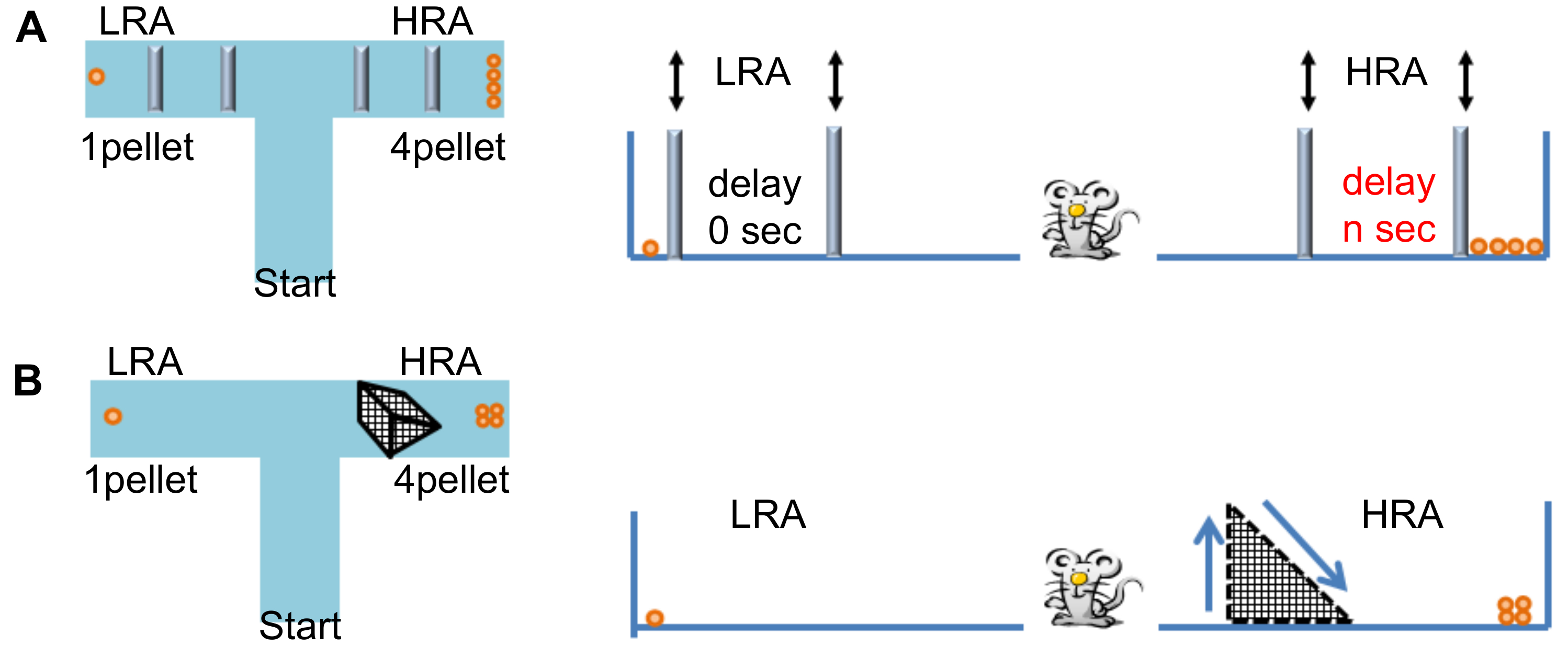
No paradigma baseado em atraso, uma porta de junção é introduzida uma vez que o animal experimental entra em um dos braços do objetivo, para que o animal é mantido no braço gol. Se o animal escolhe o LRA, a porta de gol sobre o LRA é recolhida imediatamente e uma pequena quantidade de comida é entregue. Se o animal escolhe o HRA, a porta de gol na HRA é recolhida após o atraso necessário e uma grande quantidade de alimentos de Pelotas é entregue (figura 1A). No paradigma baseado no esforço, o HRA é obstruído por uma barreira e animais devem subir sobre ele para obter uma grande quantidade de Pelotas (figura 1B). De um modo geral, o paradigma baseado em atraso é muito útil para testar a impulsividade de modelos animais e aquele baseado no esforço pode ajudar a descobrir animais apáticos2,4,11,12, 13. Hitherto pesquisadores vêm realizando este ensaio manualmente contando o tempo de atraso, inserindo e retirando portas, manobrando a barreira de esforço, contando o número de pelota, colocação pelotas em posição, colocação e retornando os animais e as escolhas dos animais para cada julgamento de gravação. Estes custos trabalhistas e tempo representam um grave gargalo experimental para pesquisadores, dificultando a utilização generalizada deste teste comportamental. No trabalho atual, nós desenvolvemos uma configuração de ZIF com base para avaliar a decisão baseado em atraso ou esforço de roedores, com capacidade de alta produtividade, padronização e automação completa.
Aparelho
Em colaboração com um fabricante comercial (veja a Tabela de materiais), desenvolvemos uma modificada automatizado aparato de ZIF que usou instrumento baseado em software de controle (Figura 2). Em particular, nós introduzimos um "back door" e "caminho de volta" em comparação com o tradicional ZIF (Figura 2), para que os animais podem voltar para o início aponte-se e iniciar um novo julgamento. A ZIF é cinza fosca colorida, e quando a condição do experimento e o software estão configurados corretamente, ambos os ratos preto e brancos podem ser detectados. Ele é composto de três braços: um iniciar braço e dois gols de armas, cada 410 mm de comprimento, com paredes em forma de V, de 155 mm de altura, uma base de 30 mm de largura e uma parte superior aberta de 155 mm de largura. O corredor em forma de V pode efetivamente impedir que ratos pulando. Além disso, o corredor em forma de V torna mais fácil de aplicar na vivo gravando com cabos. Uma caixa de início é anexada à extremidade do braço do início. Uma caixa de objetivo é anexada à extremidade de cada braço do objetivo. Dosador automático de comida é instalado em cada caixa de objetivo para entregar um número predefinido de comida doce Pelotas. A ingestão da pelota é detectada por um sensor infravermelho e é gravada automaticamente por um computador. Cada caixa de objetivo está ligada à caixa Iniciar por um corredor em linha reta. Animais autonomamente podem retornar para a caixa de início através do corredor quando terminarem um julgamento. Existem portas deslizantes de 155 mm de altura na entrada e saída de caixas início e objetivo. Além disso, uma porta deslizante está localizada na entrada de cada braço do gol para impedir que os animais se movendo para trás depois de fazer uma escolha (Figura 2A). Todas as portas de correr são controladas por um computador e pode ser automaticamente abertas e fechadas. Uma alta sensibilidade 1/2" carga dispositivo acoplado (CCD) monóculo câmera está situada acima do aparelho para controlar o comportamento dos animais. A distância focal da lente é 2,8 a 12 mm. A posição da câmera é cerca de 1,9 m de altura. Desde que a altura do labirinto é 0,5 m do chão, a distância entre a câmera e o labirinto é cerca de 1,4 m (Figura 2B). Os dados de controle obtidos a partir da câmera do CCD são usados para controle vive o ZIF, abrindo e fechando as portas específicas quando os animais entram determinadas regiões de interesse (ROIs). As barreiras utilizadas para o paradigma baseado no esforço são em forma de um triângulo direito-angular tridimensional (Figura 2), que se encaixa perfeitamente nas paredes em forma de V e cerca de 155 mm de altura. Animais devem escalar o lado vertical, mas são capazes de descer uma inclinação de 45°. O aparelho é iluminado em 100 lux durante o experimento. Pelotas usadas no experimento de açúcar (veja Tabela de materiais), e sílica-gel (ver Tabela de materiais) é usado para manter as pelotas secas.
Protocolo
Todos os protocolos experimentais foram aprovados pelas comissões de utilização do Instituto de Ciências do cérebro de RIKEN e cuidado Animal.
1. preparação animal
- Escolha o sexo, idade, genótipo e tratamentos farmacológicos de ratos experimentais (ou ratos), dependendo da finalidade experimental.
Nota: Aqui temos demonstrado o desempenho de quatro ratos masculinos de C57B/6 de 2 meses de idade. - Abrigar os ratos em uma sala, mantida em condições padrão (12h luz/12 h ciclo escuro, luzes acesas entre 08:00 e 20:00, 22 ± 1 ° C).
Nota: Se o objetivo é comparar a diferença entre dois genótipos, grupo 4 ratos por gaiola e incluem 2 ratos de cada genótipo. - Lidar com os ratos por 2 min/dia por 5 dias para familiarizá-los com o contato humano. Alimentá-los com rações medidas para que seu peso de corpo mais ou menos é mantido a cerca de 80-85% do peso alimentação livre durante todo o experimento. Fornece água ad libitum.
- Se habituar ratos a sala experimental, transferindo todos os ratos de mouse habitação quarto para a sala experimental 30 min antes da experiência de cada dia.
- Inicie experiências ao mesmo tempo cada dia para evitar os efeitos dos ritmos circadianos no desempenho animal.
2. animal habituação ao labirinto
- Começa a habituação ao labirinto simultaneamente com mouse tratamento (2 min/dia). Mantenha todas as portas abertas nesta fase. Execute habituação para um total de 5 dias.
- No dia 1, espalhe as pelotas de alimento ao longo do labirinto.
- Nos dias 2 e 3, espalhe as pelotas ao longo dos braços de dois gols.
- Nos dias 4 e 5, colocar as pastilhas somente em caixas de dois gols.
- Todos os dias, depois de colocar os pellets, coloque os ratos na caixa início da ZIF em grupos de quatro e deixe que os ratos explorar o labirinto por 10 min.
Nota: Habituating os ratos em grupos de quatro irá ajudá-los a aprender uns dos outros e acelerar a formação.
3. animal discriminação da HRA de LRA
Nota: Este protocolo inclui tanto atraso-esforço baseados e testes de tomada de decisão. No entanto, dependendo da finalidade, pesquisadores podem testar apenas um deles, ou ambos. Software de controle (Tabela de Material) é usado para controlar automaticamente a configuração de ZIF para as etapas seguintes. Se a tomada de decisão baseada no esforço será testada, introduza barreiras a HRA e LRA na fase de entrada forçada do braço. Em seguida os animais serão treinados para discriminação e barreira subindo simultaneamente. Os ratos famintos ativamente escalar as barreiras e após esta fase, todos eles trepam habilmente. Portanto, não é necessário iniciar a partir de uma barreira baixa com este protocolo.
-
Fase de entrada forçada do braço
- Abra a janela de inscrição de parâmetro do software de controle e configurar parâmetros como segue (Figura 3).
- Escolha a opção"fase". Defina o número de"julgamento" de 10, para que cada animal vai passar por 10 testes por dia, durante 5 dias contínuos.
Nota: Um pode escolher um número diferente de julgamento em sua próprias experiências. - Definir a "duração" para 900 s para que a formação de um rato por dia não irá exceder 900 s. Set o "padrão iniciar demora" para 3 s, para que a porta de início abrirá 3 s depois que o animal é detectado na área de início.
- Defina o número de"pellet" para o HRA e LRA para que 4 pelotas são sempre automaticamente dispensadas em HRA e 1 pelota é apresentada em ers.
Nota: Em nossas experiências, descobrimos que 1:4 é a melhor relação quando 10 mg açúcar pelotas são usadas. Se usarmos pelotas de 6 a 10, os ratos não podem comer todas elas e vai haver um acontecimento de omissão. - Definir o tempo de"atraso" para 0 s, assim que não haverá nenhum atraso para HRA e LRA durante esta fase.
- Escolha a opção"fase". Defina o número de"julgamento" de 10, para que cada animal vai passar por 10 testes por dia, durante 5 dias contínuos.
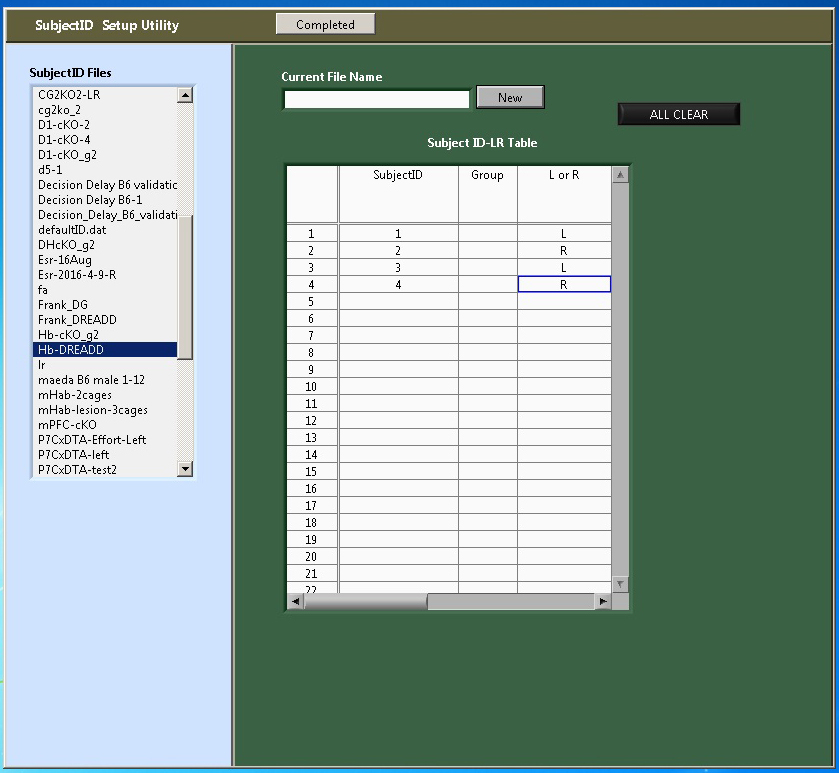
- Abra a janela de "Registro de ID" do software de controle. Identificação de cada mouse individual para software de acordo com a localização da HRA, lado esquerdo ou do lado direito do registo. (Figura 4).
Nota: O local deve ser contrabalançado com relação a grupos de genótipo. 50% de cada grupo de genótipo, o HRA está sempre à esquerda e o LRA é sempre à direita. Para os outros 50%, o HRA é sempre à direita e o LRA é sempre à esquerda. - Abra a janela do aplicativo do software, selecione "Tomada de decisão" na lista suspensa "Tarefa". Assunto ID de entrada e selecionar "Phase 2" na lista suspensa "Fase". Selecione o número de dias na lista suspensa "Dia". Pressione o botão de "Okey" para entrar a janela de interface do experimento.
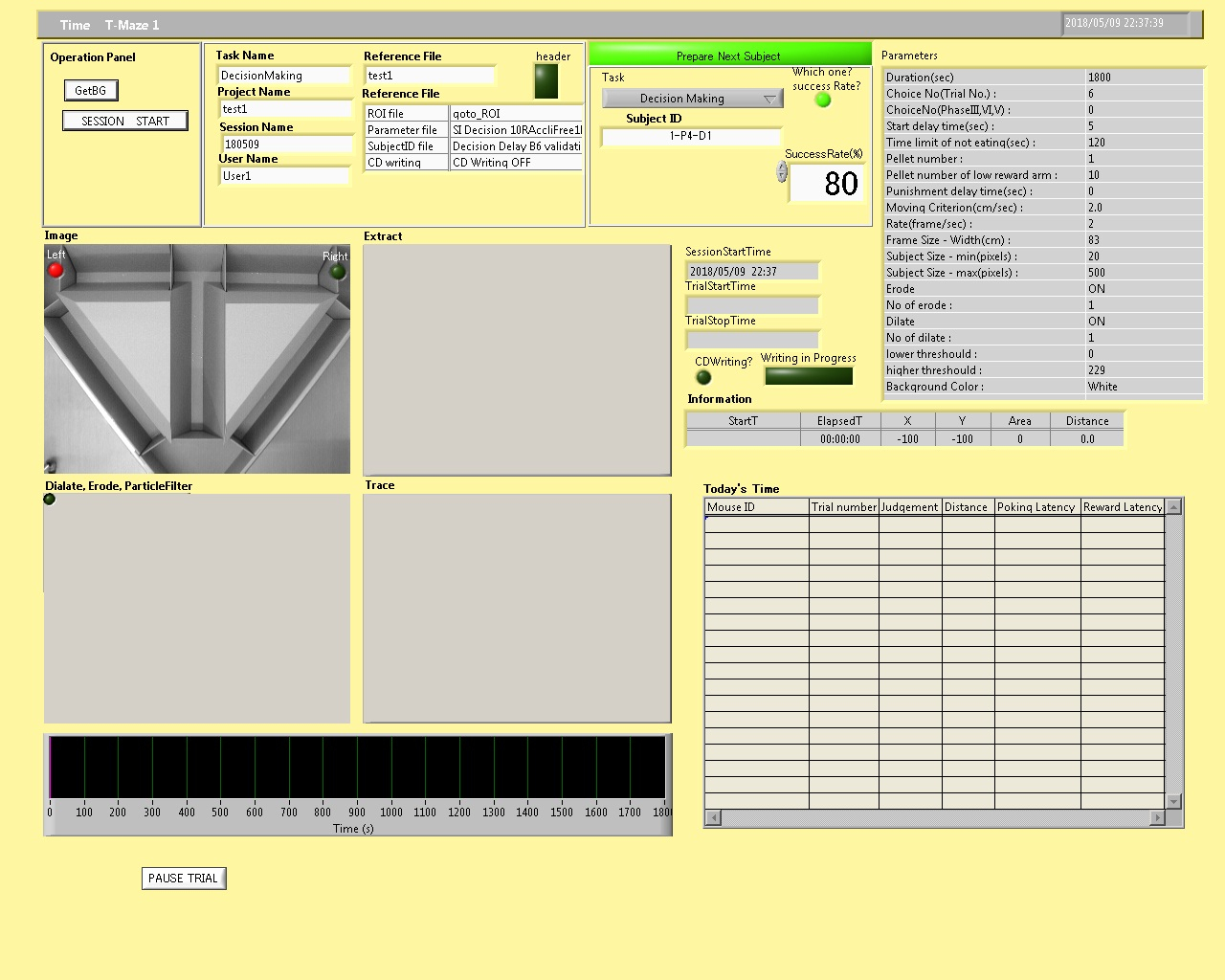
- Na janela de interface de experimento, pressione "GetBG" para registrar as informações de plano de fundo do labirinto para que o animal será controlado com precisão independentemente do plano de fundo do ambiente. Pressione o botão "Iniciar sessão" (Figura 5).
- Posicione o mouse na caixa Iniciar e iniciar o treinamento, pressionando o botão "Iniciar" do controle remoto.
- Observe que a porta de início, uma porta de junção (esquerda ou direita) será aberto automaticamente após 3 s; uma vez que o mouse entra a área de junção, a porta de início irá fechar automaticamente.
- Observe que quando o mouse entra a área de atraso (esquerda ou direita), a junção porta automaticamente fecha e a porta do gol será aberto automaticamente.
- Observe que uma vez que o rato leva a pelota, a porta traseira e porta iniciar automaticamente abrirá. Uma vez que o mouse entra a área traseira, porta traseira fechará automaticamente.
- Observe que quando o mouse entra a caixa de início, a porta de iniciar automaticamente fechará e iniciará um novo julgamento.
Nota: No prazo de 10 ensaios de cada dia durante esta fase de treinamento, o software automaticamente assegurará que cada rato visita o HRA para 5 ensaios e o LRA 5 ensaios.
- Limpe o labirinto completamente todos os dias.
- Abra a janela de inscrição de parâmetro do software de controle e configurar parâmetros como segue (Figura 3).
-
Fase de entrada do braço livre
- Registre-se parâmetros e ID do assunto da mesma forma como feito na fase de entrada forçada (etapa 3.1.1 e 3.1.2). Escolha a opção de fase "". Defina o número de"julgamento" para 20, para que cada animal vai passar por 20 ensaios, por dia durante 7 dias contínuos.
- Na janela do aplicativo, selecione "Fase 3" na lista suspensa "Fase". Defina outros parâmetros conforme passo 3.1.3.
- Na janela de interface experimento, defina o valor da "Taxa de sucesso" como 80% para que o treinamento continuará automaticamente até que o mouse seleciona o HRA em 80% dos ensaios, ou quando o mouse for concluído 20 ensaios por dia (como está registrado no programa de configuração parâmetros). Aplica outras operações conforme passo 3.1.4.
- Permitir que o mouse para escolher livremente um braço, ou HRA ou ira.
- Observe que a porta de início, duas portas de junção serão aberto automaticamente após 3 s; uma vez que o mouse entra a área de junção, a porta de início irá fechar automaticamente.
- Observe que, uma vez que o mouse escolhe um braço e entra a área de atraso (esquerda ou direita), a porta de junção automaticamente fechará e abrirá automaticamente a porta de gol.
- Observe que uma vez que o rato leva a pelota, a porta traseira e porta iniciar automaticamente abrirá. Uma vez que o mouse entra a área traseira, porta traseira fechará automaticamente.
- Observe que quando o mouse entra a caixa de início, a porta de iniciar automaticamente fechará e iniciará um novo julgamento.
4. teste de tomada de decisão baseado em atraso
- Registre-se parâmetros e ID do assunto da mesma forma como feito na fase de entrada de braço livre (passo 3.2.1). Definir o tempo de"atraso" de 5, 10,15 s no dia 1, dia 2 e dia 3 respectivamente, então que haverá atraso de 5 s para HRA no dia 1, 10 atraso de s para o HRA em atraso de s dias 2 e 15 para HRA no dia 3.
- Na janela do aplicativo, selecione "Fase 4" na lista suspensa "Fase". Defina outros parâmetros da mesma forma como em 3.2.2.
- Na janela de interface do experimento, aplica todas as operações conforme passo 3.2.3.
-
Permitir que o mouse para escolher livremente um braço, ou HRA ou ira.
- Observe que a porta de início, duas portas de junção serão aberto automaticamente após 3 s; uma vez que o mouse entra a área de junção, a porta de início irá fechar automaticamente.
- Observe que, uma vez que o mouse escolhe um braço e entra a área de atraso (esquerda ou direita), a porta de junção automaticamente irá fechar.
Nota: Se o mouse escolhe a ira, a porta do gol será aberto automaticamente imediatamente. No entanto, se o mouse escolhe a HRA, a porta do gol será aberto automaticamente após 5 s, 10 s e 15 s nos dias 1, 2, 3 respectivamente. - Observe que uma vez que o rato leva a pelota, a porta traseira e porta iniciar automaticamente abrirá. Uma vez que o mouse entra a área traseira, porta traseira fechará automaticamente.
- Observe que quando o mouse entra a caixa de início, a porta de iniciar automaticamente fechará e iniciará um novo julgamento.
Nota: Aqui, treinamos os ratos de 5 – 7 dias com cada condição de atraso. No entanto, com base na nossa experiência em testes de várias linhas de camundongos transgênicos ou mutados, 1 dia (20 testes) é absolutamente suficiente para ver a diferença entre os ratos de genótipos diferentes e não há nenhum significado prolongar o tempo de formação (ver Figura 6 como um exemplo). Portanto, atualmente, aplicamos apenas 1 dia para cada hora de atraso e funciona bem. Não haverá nenhum problema se os investigadores querem alongar os dias de treinamento dependendo de sua própria finalidade.
- Opcional: Realize o teste com o HRA invertido. Para testar se escolha do mouse é o resultado de uma preferência de orientação, alterne a posição esquerda / direita do HRA e LRA (que pode ser feito automaticamente pelo software) e permitir que os ratos de escolher livremente um braço como em 4.4.
- Opcional: Execute um teste de controle de atraso. Para testar se qualquer déficit observado é o resultado de memória espacial alterada ou sensibilidade de recompensa, em vez do resultado de mudanças na tomada de decisões, apresentar um atraso de s 15 o LRA, bem como o HRA e permitir que os ratos de escolher livremente um braço como em 4.4.
5. teste de tomada de decisão baseada em esforço
- Introduza a barreira para o HRA, conforme mostrado no diagrama (Figura 1).
- Configurar todos os parâmetros e aplicar todas as operações conforme passo 3.2 — livre fase de entrada do braço e testar os animais para 3 dias contínuos.
- Permitir que os ratos de escolher livremente um braço, ou HRA ou ira.
Nota: Aqui, treinamos os ratos durante 14 dias. No entanto, com base na nossa experiência em testes de várias linhas de camundongos transgênicos ou mutados, 3 dias são absolutamente suficiente para ver a diferença entre os ratos de genótipos diferentes e não existe significado para prolongar o tempo de formação (ver Figura 6 como exemplo ). Portanto, atualmente aplicamos somente 3 dias para teste de esforço-baseado e funciona bem. Não haverá nenhum problema se os investigadores querem alongar os dias de treinamento dependendo de sua própria finalidade. - Opcional: Realize o teste com o HRA invertido. Para testar se escolha do mouse é o resultado de uma preferência de orientação, alterne a posição esquerda / direita do HRA e LRA (que pode ser feito automaticamente pelo software) e permitir que os ratos de escolher livremente um braço como na etapa 5.3.
- Opcional: Execute um teste de esforço. Para testar se qualquer déficit observado é o resultado de memória espacial alterada ou sensibilidade de recompensa e não o resultado de alterações na tomada de decisão, apresentar uma barreira para o LRA, bem como o HRA e permitir que os ratos de escolher livremente um braço como na etapa 5.3.
6. análise de dados
-
Obter resultados e dados diretamente a partir do software de controle.
- Observe que o software irá automaticamente gravar data experimental, iniciar e terminar a tempo, duração, número de julgamento, a localização da HRA, número de sedimento na HRA e a ira, a posição (X, Y) e o rastreamento em movimento etc., de cada rato na pasta "Dados" .
- Verifique se o software tem automaticamente analisar os seguintes itens e gravá-las na pasta "Resultado" sob cada animal ID: duração, número experimental, HRA escolha número número de escolha do LRA, porcentagem de escolha HRA, porcentagem de escolha LRA, distância total em movimento, e o tempo total de junção.
- Realizar análise estatística os dados de todas as experiências por uma ANOVA mista (divisão de pontos ANOVA), com dia/sessão como fator de dentro-assunto e fator de grupo (grupo de genótipo ou grupos com diferentes condições experimentais) como fator between-assunto.
- Analise o efeito principal do fator grupo se não há interação entre sessão/dia com fator de grupo. Aplica comparações emparelhadas post hoc , se houver uma interação significativa entre sessão/dia com fator de grupo.
Resultados
Um exemplo do atraso - e esforço - com base de decisão tarefa executada por habenular medial ablated mice (ratos mHb:DTA)14 com seus mouses de controle do selvagem-tipo littermate (ratos do CT) é mostrado na Figura 6. Dois mHb:DTA ratos e ratos dois CT foram co alojados em uma gaiola após o desmame.
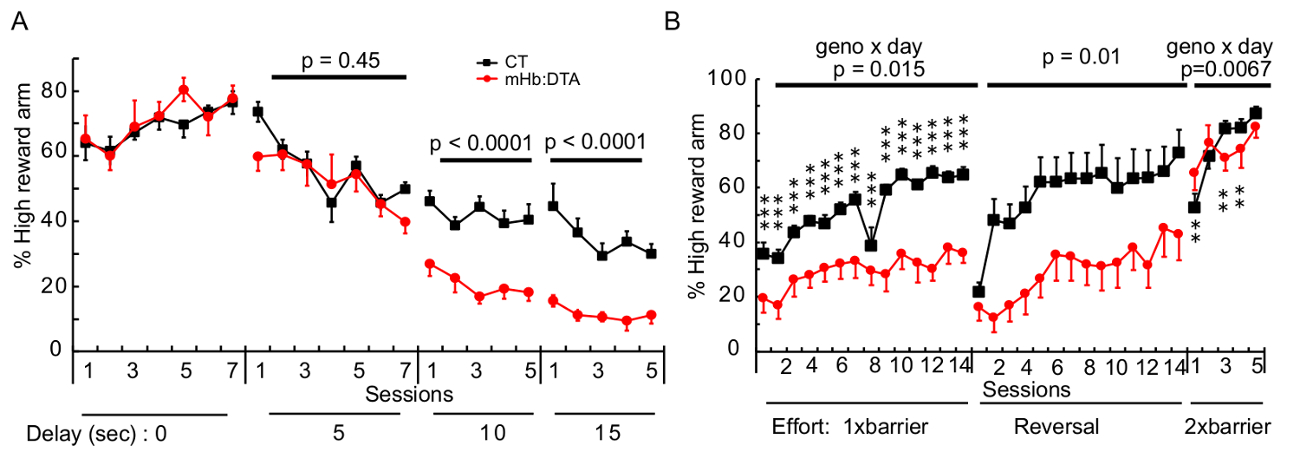
No atraso testes baseados em tomada de decisão (figura 6A), não houve nenhuma interação significativa entre genótipo e sessão em qualquer fase, incluindo a fase de treinamento de discriminação (quando o tempo de atraso da HRA foi 0) e o teste de tomada de decisão baseada em atraso fase (quando o tempo de atraso da HRA tinha 5 s, 10 s e 15 s, respectivamente). O principal efeito do genótipo não foi significativo quando o tempo de atraso foi de 5 s. No entanto, quando o tempo de atraso foi alongado para 10 s e 15 s, mHb:DTA ratos demonstraram uma redução significativa na percentagem de visitas HRA em comparação com ratos de CT. Estes resultados revelaram que a ablação de mHb diminuiu a preferência dos ratos que esperar por uma recompensa maior e exibido em vez de uma tendência de selecionar uma pequena recompensa imediatamente, quando os tempos de espera foram 10 segundos ou até mais tempo. Os dados sugeriram que mHb pode ser uma estrutura do cérebro importantes no controle da impulsividade e/ou avaliação de custo/benefício de tempo, tornando os animais mais propensos a tolerar o acesso posterior para obter uma grande recompensa.
No baseada no esforço de decisão teste (Figura 6B), o percentual de HRA visitas foram significativamente menores em camundongos mHb:DTA quando uma barreira foi colocada na HRA, independentemente da localização de esquerda/direita do HRA (1 x barreira fase e fase de reversão ). Isto significa que o fenótipo dos ratos de mHb:DTA não foi devido a um défice na memória e preferência espacial. No teste de controle de esforço, as barreiras foram colocadas em ambos os braços do objetivo (2 × barreiras fase) e ambos LRA e HRA foram associados com alto esforço. Portanto, o custo do esforço foi o mesmo para animais selecionando a recompensa baixa ou a alta recompensa. Os ratos mHb:DTA visitaram o HRA mais frequentemente que o LRA, e alcançou um comparável HRA visite número na última sessão (sessão 5). Este resultado sugere que a sensibilidade de recompensa e memória espacial em camundongos mHb:DTA estava intacto. Os dados que elucidado mHb pode desempenhar um papel importante na avaliação de custo/benefício de esforço, permitindo que os animais colocar em mais trabalho para adquirir maiores recompensas.

Figura 1: diagrama esquemático do aparelho tradicional de ZIF para teste de tomada de decisão de (A) aparelhos de teste de tomada de decisão baseada em atraso. Os animais foram colocados no braço iniciar e escolheu entre dois braços de objetivo, HRA e LRA. Quando animais escolheram o HRA, eles tiveram que esperar (dependendo do tempo de atraso em segundos) para obter uma recompensa maior. Os pesquisadores precisam lidar manualmente com animais, Pelotas e portas para cada julgamento. (B) aparelhos de teste de tomada de decisão baseada em esforço. Os animais foram colocados no braço iniciar e escolheu entre dois braços de objetivo, HRA e LRA. Quando animais escolheram o HRA, eles tinham que passar por cima de uma barreira triangular para obter uma recompensa maior. Os pesquisadores precisam lidar manualmente com animais, Pelotas, portas e barreiras para cada julgamento. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 2: Automated instalação ZIF para teste de tomada de decisão (A) vista superior da instalação automatizada. (B) vista lateral da instalação automatizada. (C) o triângulo direito-angular 3D barreira usada para teste de tomada de decisão baseada em esforço, da esquerda para a direita, são a visão lateral, a vista do lado oposto e a vista lateral de hipotenusa, respectivamente. Fotos de técnicas originais editadas com permissão do fabricante comercial. GBL: gol caixa de (à esquerda), GBR: caixa gol (à direita), GDL: porta de gol (à esquerda), GDR: porta gol (à direita), DAL: atrasar a área (à esquerda), DAR: atrasar a área (à direita), JDL: porta de junção (à esquerda), JDR: porta de junção (à direita), BDL: porta traseira (esquerda), BDR: porta traseira (direita), CCD: carga acoplada câmera do dispositivo). Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 3: janela de inscrição de parâmetro a. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 4: janela de registo o assunto ID. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 5: A janela de interface de experimento. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 6: tomada de decisão baseada no esforço e atraso em camundongos mHb:DTA. Teste de tomada de decisão baseada em atraso (A) em ratos mHb:DTA (ratos foram 12 a 14 meses-velho, n = 8/genótipo). A porcentagem de escolha HRA foi comparável entre genótipos quando o tempo de atraso foi 0 e 5 s, mas diminuiu significativamente em ratos mHb:DTA, quando o tempo de atraso foi de 10 s e 15 s. Quando o tempo de atraso foi 5 s, interação do genótipo × dia: F(1,14) = 0.594, p = 0,236; o efeito do genótipo: F(1,14) = 0,61, p = 0,45; Quando o tempo de atraso foi 10 interação do dia s: genótipo ×: F(1,14) = 37,5, p = 0.346; o efeito do genótipo: F(1,14) = 32,4, p < 0,0001; Quando o tempo de atraso foi 15 s: F(1,14) = 38,7, p = 0,243; o efeito do genótipo: F(1,14) = 31,6 e p ≤0.0001. Teste de tomada de decisão baseada em esforço (B) em ratos mHb:DTA (ratos eram 12-14 meses-velho, n = 9/genótipo). Durante 1 x fase barreira, havia uma interação significativa entre genótipo e sessão (interação do genótipo × dia: F(1,16) = 2.11, p = 0.015), e a comparação emparelhada post hoc revelou que HRA % dos ratos de mHb:DTA caiu significativamente em todos os sessões. Durante a fase de reversão, não houve nenhuma interação significativa entre genótipo e sessão (interação do genótipo × dia: F(1,16) = 1.61, p = 0,08). ratos mHb:DTA visitaram HRA significativamente menor do que os ratos CT (efeito principal de genótipo: F(1,16) = 8.18, p = 0,01). Na fase 2 × barreiras, havia uma interação significativa entre genótipos e sessões, uma diferença significativa na sessão 3 e sessão 4 (2 x fase barreiras: interação do genótipo × dia: F(1,16) = 3.9, p = 0.0067). Os ratos mHb:DTA atingidos uma HRA visitam número comparável de ratos CT na sessão final, sessão 5. Dados representam média ± SEM. * * p < 0,01; p < 0,001. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 7: fluxograma de tomada de decisão de teste (baseado em atraso ou esforço).
Discussão
Tomada de decisões é um processo cognitivo altamente conservado durante a evolução de15. Os seres humanos e animais podem avaliar o custo das opções de ação concorrentes em relação a potencial recompensa e fazer sua escolha. Pacientes que sofrem de uma série de doenças neurológicas e distúrbios psicológicos demonstram déficits em diferentes formas de tomada de decisão16. Portanto, é importante investigar os mecanismos fisiopatológicos e neurobiológicos subjacentes ao processo de tomada de decisão. Nos últimos anos, atraso e esforço-baseada em tomada de decisão está atraindo cada vez mais pesquisa de interesse. Além disso, roedores, especialmente ratos têm sido extensivamente usados para estudar estas duas formas de tomada de decisão17.
Muitos estudos levaram à descobertas interessantes usando uma tarefa comportamental envolvendo um aparelho de ZIF com uma HRA e um LRA2,6,7,8,9,10, 18 , 19 , 20 , 21 , 22. na tarefa, HRA associa grandes recompensas ou um tempo demora ou esforço esforço. Na ira, os animais podem adquirir uma pequena recompensa imediatamente sem qualquer atraso de tempo e esforço físico. A abordagem tradicional baseia-se na intervenção manual do experimentador humano. Em cada tentativa, o experimentador precisa contar as bolinhas e colocá-los nas bandejas de comida de HRA e LRA, coloque as portas gol na HRA e LRA e em seguida, colocar o animal no final do braço do início. Quando o animal entra em algum dos braços, uma porta de junção deve ser colocado para restringir o animal para o braço de objetivo. Dependendo do protocolo, o experimentador precisa contar o tempo e abrir a porta do gol após um atraso de jogo. Depois que o animal entra a área de gol e Obtém o pellet(s), o experimentador deve devolvê-lo para a gaiola e gravar escolha do braço do animal e comportamento. Em seguida, o experimentador precisa preparar as portas de ZIF e pelota para o próximo julgamento. Todo o treinamento e teste de processos são tremendamente tempo e mão de obra intensiva. Além disso, a falta de padronização entre diferentes laboratórios é outra preocupação.
Neste trabalho, apresentamos um protocolo baseado em um aparelho de ZIF automatizado modificado com um sistema de controle de vídeo (Figura 7) para resolver os problemas dos protocolos tradicionais. Introduzindo um "back door" e "corredor de volta" para o tradicional ZIF, obtivemos labirinto com uma forma de "triângulo isoceles bisseccionado". As vantagens desta configuração são (1) automação completa do comportamento de treinamento e teste. Isso remove o impacto da subjetividade do experimentador e minimiza o tempo humano e compromissos de trabalho. Temos quatro configurações no laboratório, para que quatro ratos poderiam ser treinados ou testados simultaneamente por um experimentador, que é impossível de ser realizado usando protocolos tradicionais. (2) não há flexibilidade de software como o software de controle permite experimentadores livremente configurar vários parâmetros, incluindo o número da pelota, tempo de atraso, abertura de porta e fechamento, números, duração e modo de rastreamento. Portanto, este sistema pode atender a diferentes tipos de necessidades experimentais. (3) há ampla compatibilidade como todas as portas de correr sobre a ZIF são projetadas para ser armazenado sob a base do labirinto, quando eles estão abertos. Portanto, a instalação pode ser facilmente integrada com diversos sistemas fisiológicos, incluindo manipulação optogenetic/óptico e gravação de eletrofisiologia na vivo microdialysis. Além disso, para excluir a possibilidade de que os ratos escolheram o HRA devido a uma preferência de posição, recomendamos a aplicação de um teste de controle para o atraso - e esforço - ensaio com base. Por equalizar os custos nos braços dois gols, os animais têm a oportunidade de experimentar os dois resultados de recompensa com o mesmo custo. A escolha pode ser feita simplesmente com base na recompensa diferencial, eliminando assim a necessidade de integrar tanto os custos e benefícios antes de decidir. Isto também testa se qualquer mudança na escolhas dos animais é o resultado de uma incapacidade para dimensionar o custo ou recompensa, ou déficit de memória ao invés de uma alteração da forma em que eles encobriram as suas decisões.
Em nosso laboratório, analisamos cerca de 10 cepas de ratos com esta configuração. Um exemplo foi mostrado nos dados representativos, mHb:DTA ratos demonstraram um fenótipo robusto em atraso - e tomada de decisão baseada em esforço. Ou seja, valor de recompensa é fortemente descontado pelo tempo e esforço em ratos mHb:DTA. O resultado revelou o importante papel do mHb no controle da impulsividade. Além disso, aplicámos gravações de sonda de silicone em ratos em movimento livre durante o processo de tomada de decisão (dados não publicados). Todos os experimentos previstos pontos de referência de validação a capacidade da instalação automatizada. Assim, o protocolo padronizado a ZIF com base na tomada de decisões com o aparelho automatizado é apropriado para a detecção de efeitos genéticos, efeitos farmacológicos e efeitos de circuito neural em atraso e esforço descontar de roedores. Em resumo, a instalação tem muitas vantagens para servir como um sistema ideal para os ensaios de tomada de decisão baseada em atraso e esforço.
Divulgações
Os autores não têm nada para divulgar.
Agradecimentos
Gostaríamos de agradecer o Dr. Matthew F S Rushworth (departamento de Psicologia Experimental, Universidade de Oxford) e Dr. Sakagami Masamichi (cérebro Science Research Center, Universidade de Tamagawa) por seus conselhos valiosos na iniciação do projeto e os detalhes dos protocolos. Agradecemos o Dr. Lily Yu para comentários críticos e editar o manuscrito. Este projecto foi apoiado o projeto de pesquisa RIKEN incentivo (100226201701100443) para Q.Z, o projeto de Ciências do cérebro, o centro para iniciativas de romance da ciência, os institutos nacionais de ciências naturais (BS291003) para Q.Z, o projeto envelhecimento RIKEN ( 10026-201701100263-340120) Q.Z e o subsídio de Kakenhi JSPS para jovens cientistas (B) (17841749) para Q.Z.
Contribuições de autores: Q.Z concebeu e iniciou o projeto, Q.Z, Y.K e H.G realizados os experimentos e análise de dados, H.G coordenou o trabalho entre o laboratório e o ' Hara & Co., Ltd., Q.Z e Y.K escreveram o manuscrito, INJETAVEL supervisionou o projeto.
Materiais
| Name | Company | Catalog Number | Comments |
| automated t-maze for decion making testing | O’HARA & Co.,ltd | no catalog number, customorized | Address requested by the reviewer: 4-28-16 Ekoda, Nakano-ku, Tokyo 165-0022 TEL: 81-3-3389-2451 FAX:81-3-3389-2453 |
| slica gel | Nacalai Tesque | 1709155 | |
| AIN-76A Rodent Tablet 10mg | Test Diet | 1811213(5TUL) | Manufactured for Japan,SLC |
| Time TM1 software | O’HARA & Co.,ltd | no catalog number | |
| SPSS statistics V21.0 | IBM |
Referências
- Frank, M. J., Scheres, A., Sherman, S. J. Understanding decision-making deficits in neurological conditions: insights from models of natural action selection. Philosophical Transactions of the Royal Society B: Biological Sciences. 362 (1485), 1641-1654 (2007).
- Prevost, C., Pessiglione, M., Metereau, E., Clery-Melin, M. L., Dreher, J. C. Separate valuation subsystems for delay and effort decision costs. J Neurosci. 30 (42), 14080-14090 (2010).
- Kennerley, S. W., Walton, M. E. Decision Making and Reward in Frontal Cortex: Complementary Evidence From Neurophysiological and Neuropsychological Studies. Behavioral Neuroscience. 125 (3), 297-317 (2011).
- Kurniawan, I. T., Guitart-Masip, M., Dolan, R. J. Dopamine and Effort-Based Decision Making. Frontiers in Neuroscience. 5, 81 (2011).
- Izquierdo, A., Belcher, A. M. Rodent models of adaptive decision making. Methods Mol Biol. 829, 85-101 (2012).
- Thiebot, M. H., Le Bihan, C., Soubrie, P., Simon, P. Benzodiazepines reduce the tolerance to reward delay in rats. Psychopharmacology. 86 (1-2), 147-152 (1985).
- Green, M. F., Horan, W. P., Barch, D. M., Gold, J. M. Effort-Based Decision Making: A Novel Approach for Assessing Motivation in Schizophrenia. Schizophr Bull. 41 (5), 1035-1044 (2015).
- Fatahi, Z., Sadeghi, B., Haghparast, A. Involvement of cannabinoid system in the nucleus accumbens on delay-based decision making in the rat. Behav Brain Res. 337, 107-113 (2018).
- Iodice, P., et al. Fatigue modulates dopamine availability and promotes flexible choice reversals during decision making. Sci Rep. 7 (1), (2017).
- Rudebeck, P. H., Walton, M. E., Smyth, A. N., Bannerman, D. M., Rushworth, M. F. Separate neural pathways process different decision costs. Nat Neurosci. 9 (9), 1161-1168 (2006).
- Bonnelle, V., et al. Characterization of reward and effort mechanisms in apathy. J Physiol Paris. 109 (1-3), 16-26 (2015).
- Hartmann, M. N., et al. Apathy but not diminished expression in schizophrenia is associated with discounting of monetary rewards by physical effort. Schizophr Bull. 41 (2), 503-512 (2015).
- Lockwood, P. L., et al. Prosocial apathy for helping others when effort is required. Nat Hum Behav. 1 (7), (2017).
- Kobayashi, Y., et al. Genetic dissection of medial habenula-interpeduncular nucleus pathway function in mice. Frontiers in behavioral neuroscience. 7 (17), (2013).
- Hanks, T. D., Summerfield, C. Perceptual Decision Making in Rodents, Monkeys, and Humans. Neuron. 93 (1), 15-31 (2017).
- Lee, D. Decision Making: from Neuroscience to Psychiatry. Neuron. 78 (2), 233-248 (2013).
- Carandini, M., Churchland, A. K. Probing perceptual decisions in rodents. Nature Neuroscience. 16 (7), 824-831 (2013).
- Denk, F., et al. Differential involvement of serotonin and dopamine systems in cost-benefit decisions about delay or effort. Psychopharmacology. 179 (3), 587-596 (2005).
- Walton, M. E., Bannerman, D. M., Rushworth, M. F. S. The Role of Rat Medial Frontal Cortex in Effort-Based Decision Making. The Journal of Neuroscience. 22 (24), 10996-11003 (2002).
- Bardgett, M. E., Depenbrock, M., Downs, N., Points, M., Green, L. Dopamine Modulates Effort-Based Decision-Making in Rats. Behavioral Neuroscience. 123 (2), 242-251 (2009).
- Floresco, S. B., Tse, M. T., Ghods-Sharifi, S. Dopaminergic and glutamatergic regulation of effort- and delay-based decision making. Neuropsychopharmacology. 33 (8), 1966-1979 (2008).
- Assadi, S. M., Yucel, M., Pantelis, C. Dopamine modulates neural networks involved in effort-based decision-making. Neuroscience & Biobehavioral Reviews. 33 (3), 383-393 (2009).
Reimpressões e Permissões
Solicitar permissão para reutilizar o texto ou figuras deste artigo JoVE
Solicitar PermissãoThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados