
Для просмотра этого контента требуется подписка на Jove Войдите в систему или начните бесплатную пробную версию.
Method Article
Человеко-машинного интерфейса Интеграция низкозатратных датчики с Стимуляция системы нейромышечной электростимуляции для постинсультной реабилитации Balance
В этой статье
Резюме
A novel low-cost human-machine interface for interactive post-stroke balance rehabilitation system is presented in this article. The system integrates off-the-shelf low-cost sensors towards volitionally driven electrotherapy paradigm. The proof-of-concept software interface is demonstrated on healthy volunteers.
Аннотация
Инсульт возникает, когда артерии, несущие кровь от сердца к области в мозге разрывает или сгусток затрудняет приток крови к мозгу, тем самым предотвращая доставку кислорода и питательных веществ. Около половины выживших после инсульта остается с некоторой степенью инвалидности. Инновационные методики восстановительного нейрореабилитации необходимо срочно сократить длительной инвалидности. Способность нервной системы реорганизовать свою структуру, функции и связи в ответ на внутреннего или внешнего раздражители называется Нейропластичность. Нейропластичность участвует в постинсультных функциональных нарушений, но и в реабилитации. Благотворное neuroplastic изменения могут быть облегчено с неинвазивной электротерапии, таких как нервно-мышечной электростимуляции (НМС) и сенсорной электрической стимуляции (СЭС). NMES предполагает скоординированную электрическую стимуляцию двигательных нервов и мышц, чтобы активировать их с непрерывными короткими импульсами электрического тока в то время как SES INVOльфы стимуляция чувствительных нервов с электрическим током приводит к ощущениям, которые варьируются от едва воспринимаемое до очень неприятно. При этом активное корковое участие в процедурах реабилитации может быть облегчено путем приведения в действие неинвазивный электролечение с биосигналов (ЭМГ (EMG), электроэнцефалограммы (ЭЭГ), electrooculogram (EOG)), которые представляют одновременно активное восприятие и волевых усилий. Для достижения этой цели в бедных ресурсами обстановке, например, в странах с низким и средним уровнем дохода, мы представляем недорогую человеко-машинный интерфейс (HMI) за счет использования последних достижений в области вне-полки сенсорной технологии видеоигр. В этой статье мы рассмотрим программный интерфейс с открытым исходным кодом, который объединяет недорогие вне-полки датчики для визуально-слуховое БОС с неинвазивной электротерапии для оказания помощи постурального контроля во время восстановления баланса. Продемонстрирована доказательство правильности концепции на здоровых добровольцев.
Введение
Эпизод неврологической дисфункции , вызванной очаговой церебральной, спинальной или инфаркт сетчатки называется инсульт 1. Инсульт является глобальной проблемой здравоохранения и четвертой ведущей причиной инвалидности во всем мире 1. В таких странах , как Индия и Китай, двух самых густонаселенных стран мира, неврологическая инвалидность вследствие инсульта быть помечены как скрытой эпидемии 2. Одним из наиболее распространенных медицинских осложнений после инсульта являются срывов с сообщенным частотой до 73% в течение первого года после инсульта 3. Падение после инсульта является многофакторной и включает в себя как спинномозговые и супраспинальных факторы , как баланс и безнадзорности 4 зрительно - пространственной ориентации. В обзоре Geurts и коллегами 5 идентифицированных 1) мульти-направленно обесцененные максимальный вес перемещения во время двуногого положения, 2) медленная скорость, 3) Направленный неточностей, и 4) малые амплитуды одиночных и циклических субмаксимальной сдвигов фронтальной плоскости вес , как баланс факторы падения Р.И.пестрый Последующее влияние на деятельность повседневной жизни может быть значительным , так как предыдущие работы показали , что баланс связан с амбулаторной способности и независимости валовой двигательной функции 5, 6. Кроме того, Geurts и его коллеги предположили , что 5 надостный мультисенсорной интеграции (и мышечной координации 7) в дополнение к мышечной силы имеет решающее значение для восстановления баланса , который отсутствует в текущих протоколов. На пути к мультисенсорной интеграции, наша гипотеза 8 на волюнтаристски ведомой неинвазивной электротерапии (NMES / SES) является то , что это адаптивное поведение может быть сформировано и облегчается за счет модуляции активного восприятия сенсорных входов во время NMES / SES при содействии движения пораженной конечности таким образом, что мозг может включить эту обратную связь в последующем выходе движения путем набора Alternate моторных проводящих путей 9, в случае необходимости.
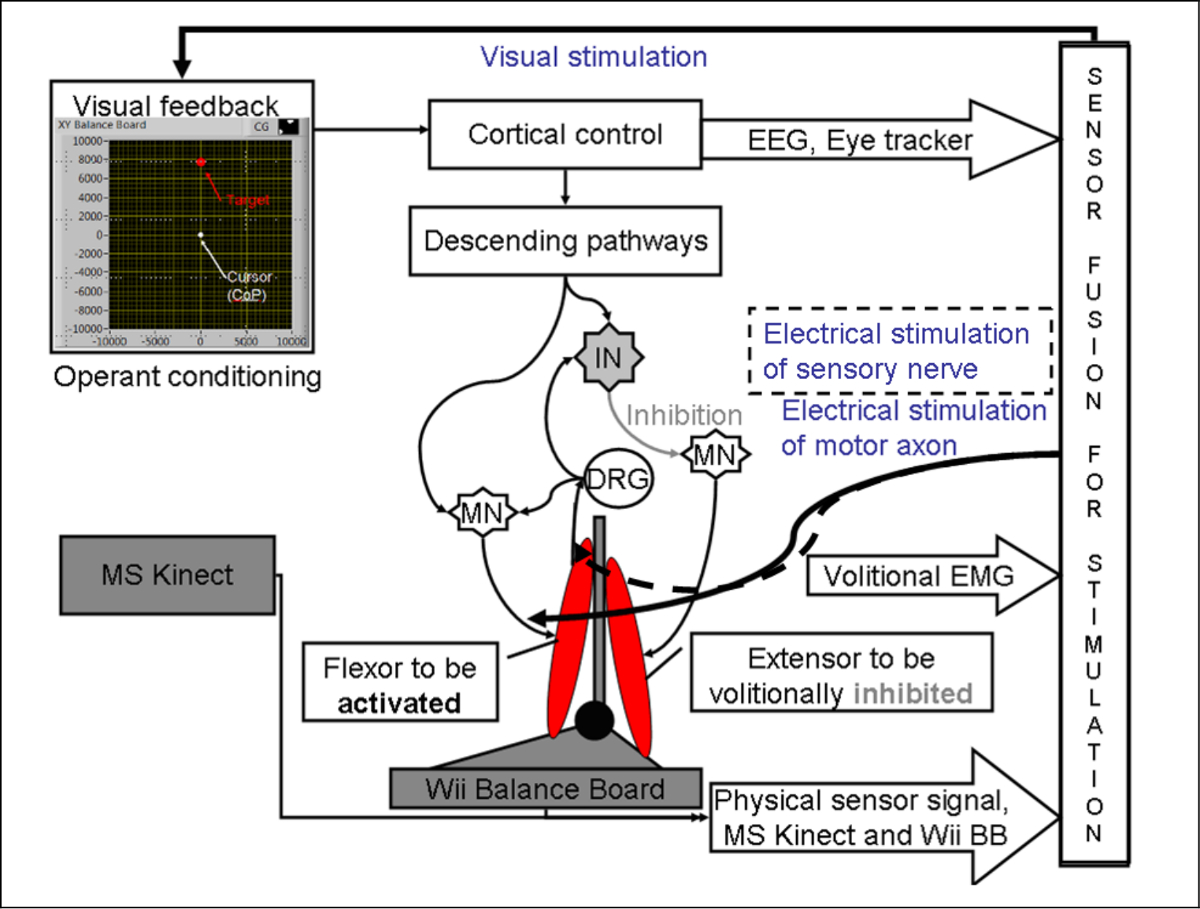
Для достижения волюнтаристски приводимый NMES / SES-тренировка равновесия при содействии в качестве ресурсаустановка Бедные, недорогой человек-машина-интерфейс (HMI) был разработан за счет использования доступного программного обеспечения с открытым исходным кодом и последних достижений в области вне-полки видеоигровой технологии датчиков для зрительно-слуховое БОС. NMES предполагает скоординированную электрическую стимуляцию нервов и мышц , что было показано , чтобы улучшить мышечную силу и уменьшить спастичность 10. Кроме того , SES включает стимуляцию чувствительных нервов с электрическим током , чтобы вызвать ощущения , где предварительные опубликованные работы 11 показали , что стимуляция subsensory наносят поверх передней большеберцовой мышцы в покое эффективен при смягчающих постуральной взмах. Здесь HMI сделает возможным интеграцию сенсорно-моторную во время интерактивного постинсультной баланса терапии, где волюнтаристски приводом NMES / SES для голеностопных мышц будет выступать в качестве усилителя мышц (с NMES), а также повышения афферентный обратной связи (с СЭС) до содействие здоровой стратегии лодыжки 12,13,14 поддерживать вертикальное позицию во время постуральных качается. Этооснованная на гипотезе , представленной в Датта и др. 8 , что повышенная Кортикоспинальных возбудимость соответствующих мышц лодыжки , проведенных через неинвазивного электротерапии может кредитовать улучшенной супраспинальной модуляции лодыжки жесткости. Действительно, до работы показали , что NMES / SES вызывает длительные изменения в корково возбудимости, возможно , в результате совместного активации двигательных и чувствительных волокон 15,16. Кроме того, Khaslavskaia и Sinkjaer 17 показали , что в организме человека одновременно двигатель корковое привода присутствует во время НМС / SES усиленных двигателя корковой возбудимости. Таким образом, волюнтаристски приводом NMES / SES может вызвать кратковременное нейропластичность в спинномозговых рефлексов (например, обратная Ia ингибирование 17) , где Кортикоспинальных нейроны , которые проектируют через нисходящий пути для данного мотонейрона пула может ингибировать антагонистическую бассейн мотонейроном через Iа-ингибирующих интернейронов в человеки 18, как показано на рисунке 1, по отношению к ортоperant парадигма кондиционирования (см Датта и др. 8).

Рисунок 1: Понятие (. Подробности в Датта и др 21) основной интерактивный интерфейс человек - машина (HMI) для управления центром давления (СОР) курсор к подают реплики цели для улучшения координации лодыжки мышц под волюнтаристски ведомой нервно - мышечной электростимуляции (НМС) -поддерживаемая visuomotor баланс терапия EEG:. электроэнцефалография, MN: α-мотонейронов, IN: Ia-ингибиторной интернейрон, ЭМГ: ЭМГ, DRG: дорсальных корешков ганглий. Воспроизводится с 8 и 37. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
{kind=link}
Передне-задней (AP) смещения в центре масс (СоМ) выполняютсяпо голеностопных plantarflexors (например, медиальной головки икроножной и камбаловидной мышцы) и dorsiflexors (например, передней большеберцовой мышцы) в то время как медио-латеральной (ML) перемещения выполняются голеностопных инверторами (например, передней большеберцовой мышцы) и evertors (такие как малоберцовой мышцы и Brevis мышцы). Следовательно, инсульт, связанных с лодыжка нарушения, включая слабость мышц лодыжки dorsiflexor и увеличение спастичности лодыжки plantarflexor мышц приводят к нарушению осанки контроля. Здесь, проворство учебные программы 6 могут быть использованы в виртуальной реальности (VR) на основе игровой платформы , что вызов динамического равновесия , где задачи постепенно увеличивать трудности , которые могут быть более эффективными , чем статическое растяжение / вес сдвига программы упражнений в предотвращении падения 6. Например, субъекты могут выполнять волюнтаристски, приводимый NMES / SES при содействии AP и ML смещения во время динамической задачи visuomotor баланса, где трудность может быть постепенно увеличена до AMELiorate постинсультных лодыжки специфические проблемы управления весом перемещения во время двуногого стоя. К волюнтаристски ведомой NMES / SES помощь баланса терапии в условиях с ограниченными ресурсами, мы представляем недорогой HMI для мобильного мозга / визуализации тела (Mobi) 19, к зрительно-слуховое БОС , который также может быть использован для сбора данных из низко- датчики затрат для автономного исследования данных в MobiLab (см Охеда и др. 20).
протокол
Примечание: Программное обеспечение HMI трубопровода был разработан на основе свободно доступного программного обеспечения с открытым исходным кодом и вне готовых датчиков недорогой видеоигры (подробности доступны по адресу: https://team.inria.fr/nphys4nrehab/software/ и https: //github.com/NeuroPhys4NeuroRehab/JoVE). Программное обеспечение HMI Трубопровод предназначен для сбора данных в течение модифицированной функциональной досягаемости задачи (mFRT) 21 в основе VR игровой платформы для visuomotor баланса терапии (VBT) 8.
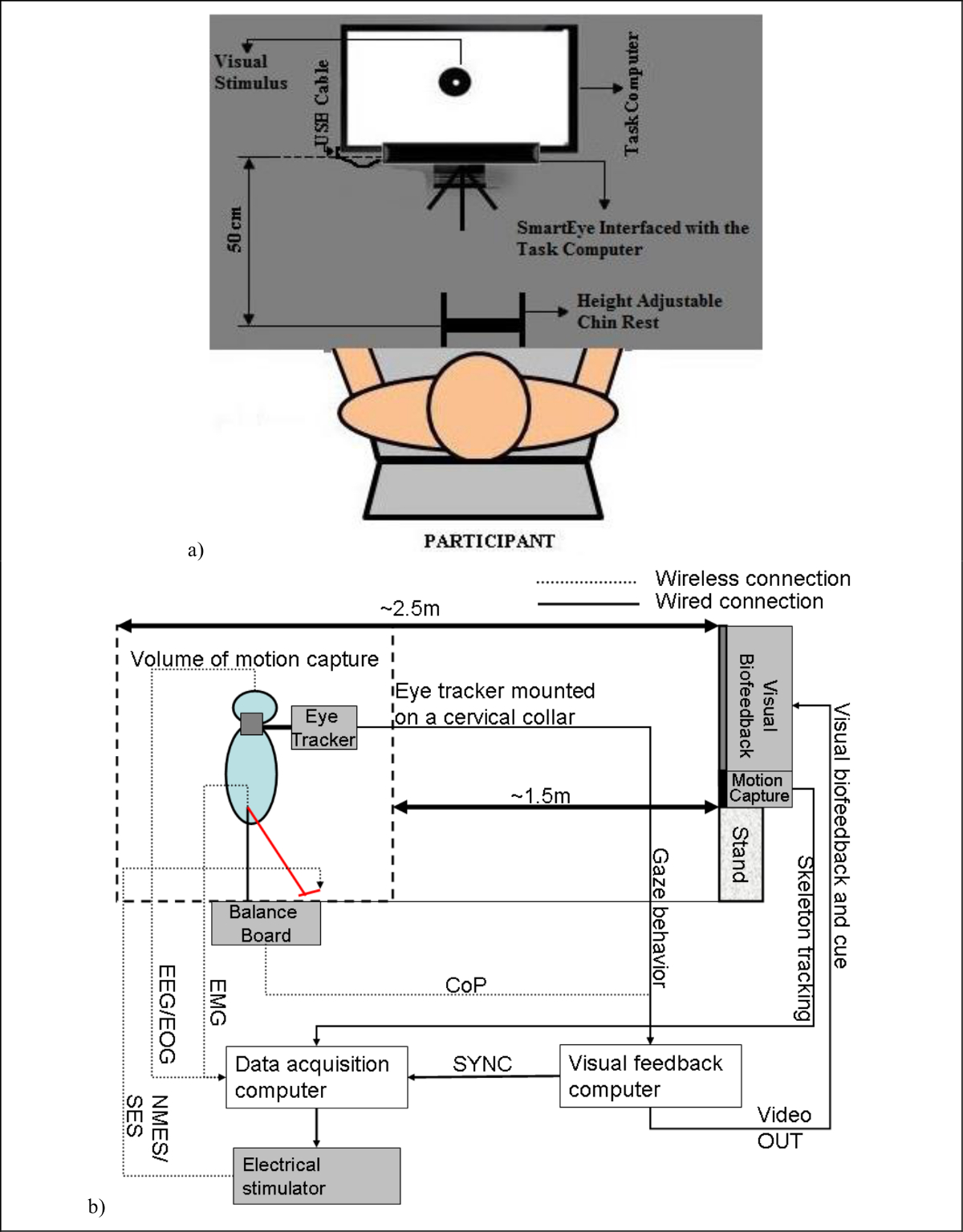
На рисунке 2а показана диагностическая установка глаз трекер , где функции Gaze извлекаются форума для количественного определения постинсультной остаточной функции таким образом , что визуальная обратная связь в VR могут быть настроены соответствующим образом .
На рисунке 2б показана экспериментальная установка для VBT.

Рисунок 2: ( а) Схема человеко-машинного интерфейса для оценки постинсультных движений глаз слежение. (Б) Схема человеко-машинного интерфейса , где программный интерфейс интегрирует биосигнала датчики и захвата движения для записи данных мобильных изображений мозга / тела с нервно - мышечной системы электрической стимуляции (НМС) и сенсорной электрической стимуляции (СЭС) для постинсультной NMES / SES-помощь visuomotor баланса терапии. NMES: Нейромышечная Электрическая стимуляция, SES: Сенсорная электрическая стимуляция, ЭМГ: ЭМГ, ЭЭГ: электроэнцефалограммы, EOG: Electrooculogram, Cop: центр давления, PC: персональный компьютер. Воспроизводится с 8 и 37. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
{kind=link}
Установка 1. Программное обеспечение для мобильных мозга / визуализации тела Во время VBT
- Установка драйверов для движения Capхарактер (процедуры установки, предлагаемые в https://code.google.com/p/labstreaminglayer/wiki/KinectMocap)
- Загрузите и установите Kinect Время воспроизведения от http://go.microsoft.com/fwlink/?LinkId=253187 (Motion Capture Датчик не должен быть подключен к любой из портов USB на компьютере).
- Подключите питанием датчика захвата движения в порт USB через интерфейсный кабель. Драйверы будут загружаться автоматически.
- Установка драйверов для Eye Tracker Sensor (процедуры установки , предлагаемые в http://github.com/esdalmaijer/EyeTribe-Toolbox-for-Matlab )
- Загрузите программное обеспечение от http://theeyetribe.com, запустить приложение и запустить приложение для установки программного обеспечения (датчик Eye Tracker не должен быть подключен к любой из портов USB на компьютере).
- Подключите питание Eye Tracker Sensor и драйверы будут загружаться автоматически.
- ин-тавсе драйверы для Совета Balance (процедуры по установке, предусмотренные в (процедуры установки, предусмотренные в http://www.colorado.edu/intphys/neuromechanics/cu_wii.html)
- Загрузка и извлечение CU_WiiBB.zip из http://www.colorado.edu/intphys/neuromechanics/CU_WiiBB.zip
- Скопируйте папку WiiLab в стандартной директории Program Files операционной системы Microsoft Window.
- Откройте папку WiiLab в папке Program Files и запустить как администратор файл InstallWiiLab.bat установки платы Balance.
- Установка драйверов для EEG / EOG (процедуры установки, предусмотренные на http://openvibe.inria.fr/how-to-connect-emotiv-epoc-with-openvibe/)
- Загрузите и установите Emotiv SDK от http://www.emotiv.com/apps/sdk/209/
- Загрузите и установите OpenViBE Приобретение сервера с labstreaminglayer (LSL) с https://code.google.com/p/labstreaminglayer/downloads/detail?name=OVAS-withLSL-0.14.3-3350-svn.zip для распределенных мульти-сеСигнал транспорта, синхронизации времени и системы сбора данных nsor (процедуры установки, предлагаемые в https://code.google.com/p/labstreaminglayer/).
- Установите драйверы для коммерческого NMES стимулятора (подробности в http://www.vivaltis.com/gammes/phenix/phenix-usb-neo-50-554-1.html#content).
2. Недорогой датчик размещения для мобильного мозга / визуализации тела (Mobi): с открытым исходным кодом Программное обеспечение HMI Трубопроводный Обеспечивает Mobile Brain / визуализации тела (Mobi) 19 с недорогими Off-The-Shelf датчиков (рис 2b) , который может быть адаптированы к другим находчивость учебных программ.
- Визуальная обратная связь для мобил:
- Начните с получения проекционный экран для отображения визуальной биологической обратной связи на одном конце комнаты (рекомендуемое расстояние от субъекта 0,6 м).
- Отрегулируйте высоту так, чтобы центр экрана будет на уровне глаз испытуемых.
- Motion Capture для мобил:
- Поместите ча движенияpture датчик в передней части экрана проекции, и направить его в объеме захвата движения.
- Убедитесь, что объем захвата движения составляет 1,5 м до 2,5 м перед датчиком захвата движения.
- Баланс Размещение платы для мобил:
- Поместите Баланс совет на полу, около 2,0 м от датчика захвата движения.
- Оставьте достаточно свободного пространства вокруг совета баланса , чтобы обеспечить движение всего тела (т.е. во время модифицированного функционала рич задачи 21).
- EEG / EMG / EOG Датчик размещения для мобил
- Попросите его, чтобы сидеть на стуле лицом к Motion Capture и с их ногами на Совете баланса.
- Поместите запись (ЭМГ) стимуляции диплом (NMES / SES) электродов на двусторонней основе на медиальной головки икроножной (MG) и передней большеберцовой (TA) мышц субъекта. Затем подключите их к беспроводной электростимулятора (/ SES NMES) системы.
- Поместите электроэнцефалограммы (ЭЭГ) колпачка на темуголова после Международной 10 - 20 системы. Затем поместите ЭЭГ электроды с проводящей пасты на, C3-ФЗ, Cz, C4, P3, PZ, P4, PO7, Оз, PO8 - перед их подключением к беспроводной гарнитуры ЭЭГ.
- Поместите два EEG электродов с электропроводной пастой выше и ниже одного из глаз для вертикального EOG и поставить два электрода с проводящей пастой на внешнем кантуса каждого глаза для горизонтального EOG. (Примечание: В случае, если датчик Eye Tracker не используется в теме после инсульта, то двусторонний EOG является предпочтительным).
- Поместите два электрода ЭЭГ на мочки качестве эталонных электродов.
3. Eye Tracker Оценка на основе постинсультной преследования движения глаз
- Попросите его, чтобы сидеть с подбородок отдыхает на регулируемой по высоте подбородник. Затем поднимите монитор компьютера на удобной высоте таким образом, чтобы глаза примерно лицом к центру монитора компьютера (рис 2а).
- Поместите Eye Tracker г 50 см тельно от подбородник и попросить предмет смотреть прямо на монитор компьютера для визуальных подсказок.
- Запуск EyeTribeWinUI.exe в папке 'SmartEye' для калибровки датчика Eye Tracker. Тема будет предложено посмотреть на различные цели на мониторе ПК в течение примерно 2 сек каждый. Типичный процесс калибровки пользователь занимает около 20 секунд, чтобы закончить. (Х, у) координаты точки взора субъекта регистрируются для различных Cued мишеней для калибровки.
- Run 'Visual_Stimulus.exe' в папке SmartEye выполнить интерфейс на основе виртуальной реальности. Впоследствии запустить программу 'SmartEye.exe', присутствующей в папке '' SmartEye приобрести глаза взглядом данные испытуемых, которая синхронизируется с задачи на основе виртуальной реальности. Эти данные будут использоваться для оценки постинсультной движения слежение глаз.
2394fig3.jpg "/>
Рисунок 3: (а) Курсор , представляющая центр давления (СОР) , который должен быть волюнтаристски доведенный до подают реплики цели при visuomotor баланса терапии, (б) протокол Visuomotor баланса терапии , когда субъект бычков компьютера курсор к периферийным цели управляется волюнтаристски генерируется Cop экскурсии. Сброс может быть оказана помощь с Нейромускульного электрической стимуляции (НМС) и сенсорно электростимуляции (СЭС), (с) Экспериментальная установка для визуально лузу visuomotor баланса терапии. Воспроизводится с 8 и 37. Пожалуйста , нажмите здесь , чтобы посмотреть увеличенную версию этой фигуры.
{kind=link}
4. NMES / SES-Assisted Visuomotor Balance Therapy (VBT) под Mobi
- Подключите глазной трекер и баланс датчиков платы к компьютеру визуальной обратной связи (Fi2 цифра).
- Убедитесь, что датчик Eye Tracker включен, подключен к компьютеру, и что он полностью загружен. Запустите 'EyeTribe server.exe' и 'EyeTribeWinUI.exe' в папке 'VBT' (см шаги 1.3).
- Убедитесь, что датчик совета баланса включен. Затем нажмите кнопку на плате датчика баланса, чтобы сделать пульт обнаруживаемым в меню. Затем нажмите на иконку показать или скрыть в панели задач системы и нажмите на иконку Bluetooth устройства. Затем нажмите на опцию "Добавить устройство" и выполнить сопряжение датчика платы баланса в качестве устройства Bluetooth без использования кода для визуального компьютера обратной связи. После того как датчик совета баланса подключен к компьютеру визуальной обратной связи, откройте папку 'Vbt' и запустить файл WiiBBinterface.m установить интерфейс на плате датчика баланса Matlab- (см шаги 1.6).
- Убедитесь, что датчик Motion Capture включен, подключен к компьютеру и что онзагружен полностью (есть зеленый светодиод на передней панели). Откройте папку LSL и запустить программное обеспечение 'MoCap', чтобы начать трансляцию данных датчиков захвата движения (см 1.6 шагов).
- Убедитесь в том, что системы сбора данных ЭЭГ / ЭОГ включены. Затем дважды щелкните на openvibe-приобретения-сервера withlsl.cmd доступного в папке LSL (см 1.6 шагов). В меню, выберите соответствующий датчик аппаратного обеспечения (т.е. 'Emotiv EPOC') и настроить модуль, при необходимости, нажав на ссылку "Свойства драйвера". Затем нажмите на кнопку "Connect", а затем нажмите на кнопку "Play", чтобы запустить сервер сбора данных.
- Калибровка датчиков для VBT
- Попросите Постинсультная при условии стоять на доске баланса с ремнями безопасности (и частичной поддержки веса тела, при необходимости).
- Установить минимальный базовый уровень NMES (широтно-импульсная и текущий уровень) , необходимую для вертикального положения в соответствии с клиническим наблюдением (то есть.,поддержка веса тела нулевой) 22. Для установки минимального базового уровня NMES, можно установить частоту стимуляции при частоте 20 Гц, а затем увеличить широтно-импульсная и / или текущий уровень, пока в вертикальном положении стоя не будет достигнута. Здесь NMES коленных разгибателей требуется генерировать достаточный крутящий момент для предотвращения потери устойчивости колена.
- Попросите его выполнять различные движения, которые охвате влияет COM- и Cop местоположение.
- Запустите программу 'CalibSensors.m' в папке 'DataCollect' для того, чтобы собрать данные калибровки нескольких датчиков в то время как субъект выполняет различные по собственной инициативе максимальные движения досягаемости в различных направлениях, которые влияют на центр масс (COM) и центр давления (CoP) расположение на визуальной обратной связи.
5. полидатчиковую сбора данных от недорогих датчиков Во время VBT (Рисунок 2b)
- Запустите программу 'CollectBaseline.m' в папке 'DataCollect' для сбора исходных условий отдыхает-state, глаза-открытые, полидатчиковую данные, задавая тему , чтобы стоять на месте в течение 2 мин, глядя прямо на цель СоР на мониторе ПК (рис 3а).
- Подключите видеовыход визуальную обратную связь компьютера на проекционный экран и запустить файл SmartEyeVRTasks.exe в папке 'VBT' в визуальном компьютере обратной связи для запуска SmartEyeVRTasks GUI. Кроме того, запустить программу 'CollectVBT.m' в папке 'DataCollect' для сбора данных датчиков во время VBT.
- Из вертикального положения, называют фазой "Центральный Hold ', задать тему , чтобы управлять курсором, движимый копом как можно быстрее в направлении случайно представленной периферической мишени , как визуально подают реплики обратной связи (рис 3b).
- После этого этапа 'Move', попросите его держать курсор в целевом месте в течение 1 сек во время фазы "Периферийное удержания".
- После 'Периферийное Hold' фаза, курсор будет " ; Сброс "обратно в центр, когда объект должен вернуться обратно в вертикальном положении - в 'позицию Центрального Hold'. NMES / SES срабатывает для мышц, когда ее уровень ЭМГ поднимается выше установленного порога, чтобы помочь усилие волевое, необходимое для возвращения Коп в положение 'Central Hold'.
Примечание: Трудность mFRT может быть увеличена за счет уменьшения коэффициента усиления, , Или увеличение дисперсии шума,
, Или увеличение дисперсии шума,  , В пределах допустимого диапазона при условии конкретных:
, В пределах допустимого диапазона при условии конкретных: 
где Коп экскурсии, , Диск компьютера курсор,
, Диск компьютера курсор,  , В дискретизованной времени,
, В дискретизованной времени,  , С временным шагом,7 "SRC =" / файлы / ftp_upload / 52394 / 52394eq7.jpg "/>.
, С временным шагом,7 "SRC =" / файлы / ftp_upload / 52394 / 52394eq7.jpg "/>.
Результаты
На рисунке 4 показаны особенности глаз Gaze , которые были извлечены в автономный режим для квантификации трудоспособного исполнения во время гладкой задачи преследования. Следующие характеристики были извлечены , как показано в таблице 1:
Обсуждение
Простой в использовании, клинически действенным инструментом низкозатратная движения и баланса терапии будет сдвиг парадигмы для нейрореабилитации в странах с низкими ресурсами. Это, вероятно, имеют очень высокое влияние на общество , так как неврологические расстройства , такие как ...
Раскрытие информации
Авторы не имеют ничего раскрывать.
Благодарности
Исследования, проведенные в рамках Совместной целевой программы в области информационных и коммуникационных наук и технологий - ИККТ, при поддержке CNRS, INRIA и DST, под зонтиком CEFIPRA в. Авторы хотели бы выразить признательность за поддержку студентов, в частности Рахима Sidiboulenouar, Rishabh Сегала и Gorish Aggarwal, к развитию экспериментальной установки.
Материалы
| Name | Company | Catalog Number | Comments |
| NMES stimulator | Vivaltis, France | PhenixUSBNeo | NMES stimulator cum EMG sensor (Figure 2b) |
| Balance Board | Nintendo, USA | Wii Balance Board | Balance Board (Figure 2b) |
| Motion Capture | Microsoft, USA | XBOX-360 Kinect | Motion Capture (Figure 2b) |
| Eye Tracker | Eye Tribe | The Eye Tribe | SmartEye Tracker (Figure 2a) |
| EEG Data Acquisition System | Emotiv, Australia | Emotiv Neuroheadset | Wireless EEG headset (Figure 2b) |
| EEG passive electrode | Olimex | EEG-PE | EEG passive electrode for EOG and references (6 in number) (Figure 2b) |
| EEG active electrode | Olimex | EEG-AE | EEG active electrode (10 in number) (Figure 2b) |
| Computer with PC monitor | Dell | Data processing and visual feedback (Figure 2) | |
| Softwares, EMG electrodes, NMES electrodes, and cables |
Ссылки
- Sacco, R. L., Kasner, S. E. An updated definition of stroke for the 21st century: a statement for healthcare professionals from the American Heart Association/American Stroke Association. Stroke; a journal of cerebral circulation. 44 (7), 2064-2089 (2013).
- Das, A., Botticello, A. L., Wylie, G. R., Radhakrishnan, K. Neurologic Disability: A Hidden Epidemic for India. Neurology. 79 (21), 2146-2147 (2012).
- Verheyden, G. S. A. F., Weerdesteyn, V. Interventions for preventing falls in people after stroke. The Cochrane database of systematic reviews. 5, 008728 (2013).
- Campbell, G. B., Matthews, J. T. An integrative review of factors associated with falls during post-stroke rehabilitation. Journal of Nursing Scholarship: An Official Publication of Sigma Theta Tau International Honor Society of Nursing / Sigma Theta Tau. 42, 395-404 (2010).
- Geurts, A. C. H., de Haart, M., van Nes, I. J. W., Duysens, J. A review of standing balance recovery from stroke. Gait & posture. 22, 267-281 (2005).
- Marigold, D. S., Eng, J. J., Dawson, A. S., Inglis, J. T., Harris, J. E., Gylfadóttir, S. Exercise leads to faster postural reflexes, improved balance and mobility, and fewer falls in older persons with chronic stroke. Journal of the American Geriatrics Society. 53, 416-423 (2005).
- Mansfield, A., Mochizuki, G., Inness, E. L., McIlroy, W. E. Clinical correlates of between-limb synchronization of standing balance control and falls during inpatient stroke rehabilitation. Neurorehabilitation and neural repair. 26, 627-635 (2012).
- Dutta, A., Lahiri, U., Das, A., Nitsche, M. A., Guiraud, D. Post-stroke balance rehabilitation under multi-level electrotherapy: a conceptual review. Neuroprosthetics. 8, 403 (2014).
- Agnes Roby-Brami, S. F. Reaching and Grasping Strategies in Hemiparetic Patients. Human Kinetics Journals. , (2010).
- Sabut, S. K., Sikdar, C., Kumar, R., Mahadevappa, M. Functional electrical stimulation of dorsiflexor muscle: effects on dorsiflexor strength, plantarflexor spasticity, and motor recovery in stroke patients. NeuroRehabilitation. 29, 393-400 (2011).
- Magalhães, F. H., Kohn, A. F. Effectiveness of electrical noise in reducing postural sway: a comparison between imperceptible stimulation applied to the anterior and to the posterior leg muscles. European Journal of Applied Physiology. 114, 1129-1141 (2014).
- Hwang, S., Tae, K., Sohn, R., Kim, J., Son, J., Kim, Y. The balance recovery mechanisms against unexpected forward perturbation. Annals of biomedical engineering. 37, 1629-1637 (2009).
- Gatev, P., Thomas, S., Kepple, T., Hallett, M. Feedforward ankle strategy of balance during quiet stance in adults. The Journal of physiology. 514, 915-928 (1999).
- Cofre Lizama, E. L., Pijnappels, M., Reeves, N. P., Verschueren, S. M. P., van Dieën, J. H. Can explicit visual feedback of postural sway efface the effects of sensory manipulations on mediolateral balance performance. Journal of Neurophysiology. , (2015).
- Knash, M. E., Kido, A., Gorassini, M., Chan, K. M., Stein, R. B. Electrical stimulation of the human common peroneal nerve elicits lasting facilitation of cortical motor-evoked potentials. Experimental brain research. 153, 366-377 (2003).
- Dinse, H. R., Tegenthoff, M. Evoking plasticity through sensory stimulation: Implications for learning and rehabilitation. The Journal of neuroscience: the official journal of the Society for Neuroscience. 6, 11-20 (2015).
- Khaslavskaia, S., Sinkjaer, T. Motor cortex excitability following repetitive electrical stimulation of the common peroneal nerve depends on the voluntary drive. Experimental brain research. 162, 497-502 (2005).
- Perez, M. A., Field-Fote, E. C., Floeter, M. K. Patterned sensory stimulation induces plasticity in reciprocal ia inhibition in humans. The Journal of neuroscience: the official journal of the Society for Neuroscience. 23, 2014-2018 (2003).
- Makeig, S. Mind Monitoring via Mobile Brain-Body Imaging. Foundations of Augmented Cognition. Neuroergonomics and Operational. , 749-758 (2009).
- Ojeda, A., Bigdely-Shamlo, N., Makeig, S. MoBILAB: an open source toolbox for analysis and visualization of mobile brain/body imaging data. Frontiers in Human Neuroscience. 8, 121 (2014).
- Dutta, A., Chugh, S., Banerjee, A., Dutta, A. Point-of-care-testing of standing posture with Wii balance board and microsoft kinect during transcranial direct current stimulation: A feasibility study. NeuroRehabilitation. 34, 789-798 (2014).
- Nataraj, R. . Feedback Control Of Standing Balance Using Functional Neuromuscular Stimulation Following Spinal Cord Injury. , (2011).
- Dutta, A., Paulus, W., Nitsche, A., M, Translational Methods for Non-Invasive Electrical Stimulation to Facilitate Gait Rehabilitation Following Stroke - The Future Directions. Neuroscience and Biomedical Engineering. 1, 22-33 (2013).
- Banerjee, A., Khattar, B., Dutta, A. A Low-Cost Biofeedback System for Electromyogram-Triggered Functional Electrical Stimulation Therapy: An Indo-German Feasibility Study. ISRN Stroke. 2014, e827453 (2014).
- Kerkhoff, G., Reinhart, S., Ziegler, W., Artinger, F., Marquardt, C., Keller, I. Smooth pursuit eye movement training promotes recovery from auditory and visual neglect: a randomized controlled study. Neurorehabilitation and Neural Repair. 27, 789-798 (2013).
- Carl, J. R., Gellman, R. S. Human smooth pursuit: stimulus-dependent responses. Journal of Neurophysiology. 57, 1446-1463 (1987).
- Clark, R. A., Bryant, A. L., Pua, Y., McCrory, P., Bennell, K., Hunt, M. Validity and reliability of the Nintendo Wii Balance Board for assessment of standing balance. Gait & posture. 31, 307-310 (2010).
- Clark, R. A., Pua, Y. -. H. Validity of the Microsoft Kinect for assessment of postural control. Gait & posture. 36, 372-377 (2012).
- Khattar, B., Banerjee, A., Reddi, R., Dutta, A. Feasibility of Functional Electrical Stimulation-Assisted Neurorehabilitation following Stroke in India: A Case Series. Case Reports in Neurological Medicine. 2012, e830873 (2012).
- Sailer, U., Flanagan, J. R., Johansson, R. S. Eye-hand coordination during learning of a novel visuomotor task. The Journal of neuroscience: the official journal of the Society for Neuroscience. 25, 8833-8842 (2005).
- Herr, H., Popovic, M. Angular momentum in human walking. The Journal of Experimental Biology. 211, 467-481 (2008).
- Taub, E., Morris, D. M. Constraint-induced movement therapy to enhance recovery after stroke. Current atherosclerosis reports. 3, 279-286 (2001).
- Kasten, E., Wuest, S., Sabel, B. A. Residual vision in transition zones in patients with cerebral blindness. Journal of Clinical and Experimental Neuropsychology. 20, 581-598 (1998).
- Marshall, S. P. Identifying Cognitive State from Eye Metrics. Aviation, Space, and Environmental Medicine. 78, 165-175 (2007).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J. R., Geurts, A. C. H. Falls in individuals with stroke. Journal of Rehabilitation Research and Development. 45, 1195-1213 (2008).
- Stinear, C. M., Barber, P. A., Petoe, M., Anwar, S., Byblow, W. D. The PREP algorithm predicts potential for upper limb recovery after stroke. Brain: A Journal of Neurology. 135 ((Pt 8)), 2527-2535 (2012).
- Dutta, A., Lahiri, D., Kumar, U., Das, A., Padma, M. V. Post-stroke engagement-sensitive balance rehabilitation under an adaptive multi-level electrotherapy: clinical hypothesis and computational framework. Neuroscience and Biomedical Engineering. 2 (2), 68-80 (2015).
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеСмотреть дополнительные статьи
This article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены