
Summary
Abstract
Introduction
Protocol
Representative Results
Discussion
Acknowledgements
Materials
References
Bioengineering
ロボットマイクロインジェクションを用いた脳スライスにおける単一神経幹細胞とニューロンの操作
このプロトコルは、脳スライス中の単一の神経幹細胞およびニューロンへのマイクロインジェクションのためのロボットプラットフォームの使用を実証する。この技術は多目的であり、高い空間分解能を持つ組織の細胞を追跡する方法を提供する。
発生神経生物学の中心的な問題は、神経幹細胞と前駆細胞がどのように脳を形成するかである。この質問に答えるためには、時間の経過とともに高解像度の脳組織の単一の細胞にラベルを付け、操作し、従う必要があります。このタスクは、脳内の組織の複雑さのために非常に困難です。最近では、顕微鏡から取得した画像を利用して、マイクロインジェクションニードルを脳組織に導き、フェムトリットルの溶液を単一細胞に送達するロボットを開発しました。ロボット操作は、手動マイクロインジェクションよりも桁違いに大きい全体的な収量を増加させ、生体組織における単一細胞の正確なラベリングと柔軟な操作を可能にします。これにより、1つのorganotypicスライス内に何百もの細胞をマイクロ注入することができます。この記事では、脳組織スライスにおける神経前駆細胞およびニューロンの自動マイクロインジェクションにマイクロインジェクションロボットを使用する方法を示します。より広い意味では、ピペットで到達可能な表面を特徴とする任意の上皮組織に使用することができる。一度設定すると、マイクロインジェクションロボットは毎分15回以上のマイクロインジェクションを実行できます。マイクロインジェクションロボットは、そのスループットとバーサリティのために、生物学的な脳スライスで単細胞分析を行うためのバイオエンジニアリング、バイオテクノロジー、および生物物理学で使用される広く簡単な高性能細胞操作技術をマイクロインジェクションにします。
このプロトコルは、特に単一の神経幹細胞およびニューロンに焦点を当てた脳組織スライス内の単一細胞を標的と操作するためのロボットの使用を記述する。このロボットは、神経生物学の中心的な問題に対処するために開発されました, それは神経幹と前駆細胞が脳形態形成に貢献する方法であります1,2,3,4,5.この質問に答えるためには、単一の神経幹細胞にラベルを付けて追跡し、時間の経過とともに系統の進行に従って、単一細胞の挙動と組織形態形成を相関させる必要があります。これは、子宮内の脳組織を電気ポレートするか、親油性ダイスを使用して単一細胞を標識することによって、異なる方法で達成することができる。強力ですが、これらの方法は、正確な単一細胞分解能(エレクトロポレーション)および/または細胞内空間(親油性色素)を操作する可能性を欠いている。この課題を克服するために単一細胞へのマイクロインジェクション6,7,8.マイクロインジェクションの間に、ピペットは、試薬9のフェムトリットル量をマイクロインジェクトする圧力下で、無傷の組織内の単一の細胞に短時間挿入される。我々は、前もって、単一神経幹細胞を単一神経幹細胞に対して単一の組織にマイクロインジェクトする手作業を説明した(図1A)10,11。神経幹細胞へのマイクロインジェクションは、単一の神経幹細胞に挿入されるマイクロピペットを使用して、目的の他の分子と共に蛍光色素を含む溶液を注入することに依存しています。神経幹細胞の選択的標的化は、心室表面を介して発達中のテレンセバロン(または心室、図1Aの漫画を参照)に近づくことで達成される。それは、アプリカル前駆細胞の頭膜形質膜によって形成される(図1Aの漫画)。このプロセスは、実験者が注入することを望む各細胞に対して繰り返されなければならない。さらに、マイクロインジェクションの成功は、組織におけるマイクロピペット注入の深さと持続時間の正確な制御に依存する。したがって、独自の利点にもかかわらず、手動マイクロインジェクションは非常に退屈であり、合理的なスループットと収率で実行するためにかなりの練習が必要であり、この技術はスケーラブルな方法で使用することが困難になります。この制限を克服するために、我々は最近、単一細胞へのマイクロインジェクションを自動的に行うことができる画像誘導ロボット、オートインジェクタ12(またはマイクロインジェクションロボット)を開発しました。
マイクロインジェクションロボットは、顕微鏡イメージングとコンピュータビジョンアルゴリズムを利用して、組織内の3次元空間内の特定の位置を精密に標的化してマイクロインジェクションを行います(図1B)。マイクロインジェクションロボットは、既存のマイクロインジェクション設定に比較的簡単な修正を加えることで構築できます。マイクロインジェクションロボットの全体概略を 図1Cに示します。ピペットは3軸マニピュレータに取り付けられたピペットホルダーに取り付けられます。顕微鏡カメラは、組織とマイクロ注射針の画像を取得するために使用されます。カスタム圧力制御システムは、ピペット内部の圧力を制御するために使用され、プログラム可能なマイクロマニピュレータは、マイクロインジェクターピペットの位置を制御するために使用されます。組織とマイクロインジェクションピペットのカメラ画像は、マイクロインジェクションピペット先端の空間位置とマイクロインジェクションを行う必要がある場所を決定するために使用されます。ソフトウェアは、その後、組織内のピペットを移動するために必要な軌道を計算します。すべてのハードウェアは、以前に開発したソフトウェアによって制御されます。すべてのソフトウェアは、コーディング言語(例えば、PythonとArduino)で書かられており、指示https://github.com/bsbrl/Autoinjectorからダウンロードすることができます。グラフィカルユーザーインターフェース(GUI)は、ユーザーが組織とマイクロピペットを画像化し、マイクロインジェクションの軌跡をカスタマイズすることができます。当社のシステムは、明視野フィルターとエピ蛍光フィルターを搭載した反転顕微鏡に比較的簡単な変更を使用して確立することができます。
まず、マイクロインジェクション用の脳の組織性組織スライスの準備について説明します。次に、このプロトコルは、マイクロインジェクションロボットの開始と、マイクロインジェクションの前に行う必要があるピペットモーションキャリブレーションなどの準備ステップを開始することを示しています。その後、射出パラメータを定義します。この後、ユーザはマイクロインジェクションロボットが使用する軌道を定義し、射出手順を開始することができます。マイクロ注入された組織(この場合は脳のorganotypic組織スライス)は、実験計画10、11に応じて異なる期間培養中に保つことができる。組織は、注入された細胞とその子孫の同一性と運命に従い、研究するために処理することができる。あるいは、マイクロ注入された細胞は、ライブイメージングを用いて追跡することができる。このプロトコルの範囲内で、我々は自動的にマウスE14.5後回りのテレンスファロンの組織ノチピックスライス中の神経前駆細胞をマイクロインジェクションするロボットの使用を実証する。ロボットは、マウスのテレンスファロンの新生児ニューロンにマイクロインジェクションを加えることができるだけでなく、ヒト胎児のテレンスファロン12でも可能である。
要約すると、我々は、組織の単一細胞を従い、操作するために使用することができるロボットプラットフォームを記述する。プラットフォームは圧力を利用し、したがって、注入する化合物の化学的性質に関して非常に汎用性がある。また、幹細胞以外の標的細胞に適合させることができる。当社のシステムは、他のモデルシステムにも容易に適応できると期待しています。
すべての動物研究はドイツの動物福祉法に従って行われ、必要なライセンスはドイツのドレスデンの動物実験のための地域倫理委員会(Tierversuchskommission、Landesdirektionドレスデン)から取得されました。Organotypicスライスは、E14.5またはE16.5 C57BL/6マウス胚性テレンセファロン(Janvier Labs)から調製した。
1. ソフトウェアのインストール
- 指示に従って、https://github.com/bsbrl/Autoinjectorからソフトウェアをインストールします。
2. 試薬・ピペットの製造
- アガロース:2つの別々の200 mLガラス瓶に100mLの細胞培養グレードPBSの3gの広い範囲のアガロースと3gの低融点アガロースの3gを別々に溶解することによって3%のアガロースを調製する。室温で3ヶ月まで保管してください。
- タイローデ溶液:重炭酸ナトリウムとタイローデの塩1g(ボトル全体の含有量を使用)、1Lの蒸留水に1M HEPESの13 mLを溶解します。pH を 7.4 に調整します。0.2 μmのボトルトップフィルターで溶液をフィルターします。
- スライス培地(SCM):ラット血清10mL、2mMグルタミン1mL、ペニシリンストレプトマイシン100x、N-2サプリメント1mL(100x)、B27サプリメント(50x)2mL(50x)、HEPES1mL(pH 7.3)バッファーを84mLの神経バザルに加える。アリコート 5 mL の SCM を 15 mL チューブにします。-20°Cで保管してください。
- CO2-独立マイクロインジェクション培地(CIMM):蒸留水200mLで粉末を溶解して、5倍DMEM改質低グルコース溶液(フェノールレッドなし)を調製します。0.2 μmのボトルトップフィルターを通したフィルターソリューション(DMEMパウダーの場合は、ボトル全体の内容を使用)。CIMMの100 mLを調製するために、5x DMEM改変溶液の20 mL、1 mLのHEPESバッファー、1mLのN2サプリメント(100x)、B27サプリメント(50x)の2mL、ペニシリン・ストレプトマイシン1mL(100x)、2mLの2mL、74mLの蒸留水を混合する。溶液を4°Cで保存してください。
- 再構成バッファー: 262 mM NaHCO 3,0.05N NaOH, 200 mM HEPES を蒸留水に溶解して再構成バッファーを準備します。ボトルトップ0.22 μmフィルターシステムを通して滅菌ガラスボトルに入り、溶液を殺菌します。アリコート500 μLの再構成バッファーを気密マイクロ遠心チューブに入れます。4 °Cで保管。
- マイクロインジェクション染料ストック:蛍光標識されたデキストランをRNaseフリー蒸留水(最終濃度10μg/μL)に溶解します。5 μLのアリコートを準備し、使用するまで-20°Cで保管してください。
- マイクロピペットプーラーを使用して、ホウケイ酸ガラスキャピラリー(1.2 mm外径、0.94mm内径)からマイクロインジェクションピペットを引き出します。ピペットをほこりから守ります。ピペットは2~3日以上保管しないでください。この実験では、引っ張りパラメータは HEAT: ランプ温度 +1 – 5;プル: 100;VEL: 110;デル: 100.HEATとVELは、ピペットの最も形状とサイズに影響を与えるパラメータです。
注:最適なマイクロインジェクションピペットは、マイクロインジェクション中の細胞損傷を避けるために、長くて柔軟なチップを備えています。
3. ティッシュスライスの準備
- 脳組織解剖の前に電子レンジを使用して3%広域アガロースを溶融します。埋め込む前に37°Cの水浴に保管してアガロースを固めないでください。ピペットがほこりから保護されていることを確認します。ピペットは2~3日以上保管しないでください。
- SCMのアリコートを解凍し、水浴を使用して37 °Cにタイロードの溶液の10 - 12 mL CIMMと20 mLを温めます。
- 蛍光トレーサー(Dextran-3000またはDextran-10000-Alexa共役;最終濃度5~10μg/μL)を、他の化学薬品と混ぜ合わせます。マイクロインジェクション溶液を16,000xgで4°Cで30分間遠心分離する。 上清を収集し、新しいチューブに転送します。マイクロインジェクション溶液を使用するまで氷の上に保管してください。
- E13.5 – E16.5マウス胚の頭部を使用して、テレンセファロンの組織組織スライスを準備します。皮膚を取り除き、鉗子を使用して頭蓋骨を開き、正中線に沿って移動します。開いた頭蓋骨から胚性脳を解剖し、脳の腹側から始まる脳組織を覆う髄液を取り除く。解剖した全脳をタイローデの溶液中に37°Cの加熱ブロックに残します。
注: 3.4 で説明されているすべての解剖手順は、事前にウォームされた Tyrode のソリューションで実行する必要があります。 - 広い範囲の溶融アガロースを使い捨て埋め込み型に注ぎます。アガロースを38~39°Cに冷却すると、パスツールピペットを使用して脳(最大4個)を慎重に移します。このステップでは、常にカットヒントを使用してください。
- 組織に触れることなく、ヘラまたはデュモン#1鉗子を使用して、組織の周りにアガロースをかき混ぜます。アガロースを室温で固めます。アガロースが固まったら、組織を取り巻く過剰なアガロースをトリミングする。
- バッファトレイにPBSを入れます。トレイに垂直な組織のロストロ・カウダル軸で脳を向けます(嗅球のランドマークとして使用し、脳の最もrostral -部分を表します)。ビブラートを使用して250μmのスライスをカットします。
- 3.5cmのペトリ皿に2mLのプリウォームドメディアを入れます。プラスチック製のパスツールピペットを使用して、この皿にスライス(10 - 15)を転送します。一度完了したら、スライスでペトリ皿をスライス培養器にシフトします。40%O2/5%CO2/55%N2を含む加湿雰囲気で37°Cでスライスを保持します。
4. マイクロインジェクション
- コンピュータ、顕微鏡、顕微鏡カメラ、マニピュレータ、圧力リグ、圧力センサーの電源を入れます。GitHub からダウンロードしたメインフォルダにあるファイル"launchapp.py"をクリックしてアプリケーションをロードし、ポップアップ画面でデバイス設定を指定します (インストール手順については、手順 1.1 を参照)。
- ピペットを溶液に浸す前に、不要な詰まりを防ぐために外向きの圧力を作成します。ピペットに圧力を加える場合は、 補償圧力 バーを 24 ~ 45% にスライドさせて、[ 値の設定] をクリックします。次に、圧力センサで示される 1 – 2 PSI (69 – 138 mbar) に機械的圧力バルブノブを回して、十分な圧力に圧力を調整します。
- 2 mLの事前温めたCIMMを含む3.5cmのペトリ皿にスライスを移します。ペトリ皿の中央にマイクロインジェクションするスライスを置きます。ペトリ皿を予熱(37°C)マイクロインジェクション段階に移します。
- マイクロインジェクションピペットに1.4 -1.6 μLのマイクロインジェクション溶液(ステップ3.3から)を長チップのプラスチックピペットを使用してロードします。マイクロインジェクションピペットをピペットホルダーに挿入します。
- 顕微鏡で最も低い倍率を使用して、スライスを焦点に持ち込み、マイクロピペットをこの視野(FOV)に導き、スライスターゲットと同じ平面に焦点を合わせます。アプリケーションでFOVを確認するために、カメラに顕微鏡の出力を切り替えます。
- インターフェイスの左上にある拡大ボタンをクリックして、デバイスのキャリブレーションを開始します。ウィンドウは倍率を選択するように求められます。10倍の倍率を選択するか、レンズが設定されている倍率(例えば、4x、10x、20x、40x)を選択し 、OKを押します。ソフトウェアは、内部対物レンズが10倍(最も一般的な対物レンズの倍率)であると仮定します。
- 顕微鏡のマイクロメトリックホイールを使用してピペットチップを再び焦点を合わせ、カーソルでピペットチップをクリックします。次に、ステップ1.1ボタンを押し、ポップアップウィンドウでOKを押します。ピペットはY方向に移動します。ピペットの先端をクリックし、ステップ1.2ボタンを押します。最後に、ピペットの角度ボックスに45と入力し、設定角度を押します。
- 必要なパラメータを [自動マイクロインジェクションコントロール ]パネルに入力します。素端な前駆体へのマイクロインジェクションでは、射出距離を20~40μm、深さを10~15μmに設定します。ニューロンへのマイクロインジェクションの場合、基礎側からの射出距離は30~40μm、深さはターゲットに設定されている内容に応じて10~30μmに設定されます。常に速度を 100% に設定します。[ 値の設定]をクリックします。
注:アプローチ距離はピペットが次の注入距離に移動する前に組織から引き出す距離であり、深さはマイクロインジェクションが行く組織への深さであり、間隔は順次注入の間の線に沿った距離であり、速度はμm/sのピペットの速度である。 - [ エッジの描画 ]ボタンをクリックし、ポップアップ ウィンドウで目的の軌道に沿ってカーソルをドラッグして、射出の軌道を定義します。前駆細胞をマイクロ注入する場合、テレンスファロン表面の腹側は 図2Aに示すように標的とする。ピペットをラインの先頭に持ってきて、ピペットの先端をクリックします。マイクロインジェクトを開始するには 、[軌道を実行 ]をクリックします。このステップを、対象とする射出の各平面に対して繰り返します(通常、1面あたり40-75回の注射を行う3~4機で行われます)。
5. 免疫蛍光のための組織培養と組織スライス処理
- コラーゲン混合物(1.5mg/mL)を調製する:チューブにマトリックス溶液1.25mL、蒸留水0.5mL、5x DMEM-F12溶液の0.5 mL、再構成バッファー0.25 mLを加えます。使用するまで氷の上に保管してください。
- スライス培養インキュベーションチャンバーからマイクロ注入スライスを含むペトリ皿を入手し、そのスライスをコラーゲン混合物に浸漬します。
- 200 ~ 300 μL のコラーゲン混合物と共に、35 mm のガラス底皿の 14 mm ウェルにスライスを移します。スライスが非常に少ないコラーゲンで覆われていることを確認してください。このセットアップは、栄養素と酸素の取り込みに最適な条件を可能にします。
- 2 組の鉗子を使用してスライス間に十分なスペースがあることを確認しながら、スライスの方向を設定します。加熱ブロックを使用してペトリ皿を37°Cで5分間インキュベートし、コラーゲンを固化させる。この時間をスライスカルチャの t = 0 と考えてください。
- ペトリ皿をスライス培養器に戻し、さらに40分間移動します。その後、2 mLの温め込み SCM を加えます。スライスは、所望のタイムポイントまでカルチャに保持されます。
- スライス培養インキュベーターからスライスを取り出し、SCMを吸引します。コラーゲン埋め込みスライスを1倍のPBSで洗います。4%(wt/vol)パラホルムアルデヒド(120 mMリン酸緩衝液、pH 7.4)を加え、30分間RTに組織を残します。その後、一晩固定できるように4°Cに移動します。
- 翌日パラホルムアルデヒド溶液を吸引し、1xPBSを行う。コラーゲンからスライスを取り除くために、2組の鉗子を使用して、実体顕微鏡下でスライスを穏やかに抽出します。
- マイクロ注入スライスを処理するために3%(wt/vol)低融点アガロースを溶融するためにマイクロ波を使用してください。溶けたアガロースを使い捨ての埋め込み型に注ぎ、38~39 °C程度に冷却します。
- プラスチック製のパスツールピペットを使用して、低融解アガロースを含むこの金型にステップ5.7から組織スライスを移します。スライスのパイル側が上にあり、心室表面が下向きになっていることを確認します。必要に応じてそれに応じてオリエント。アガロースをRTに冷まして固めましょう。
- スライスを囲む余分なアガローズをトリミングします。アガロースブロックの向きを変えて、カット面がビブラートメの切断ブレードと平行になるようにします。ビブラートメを使用して、50 μmの厚いセクションをカットします。
- 24の井戸皿に1x PBSを入れます。細かい先端のペイントブラシを使用して、この皿にセクションを転送します。標準プロトコルに従って免疫蛍光を行います。
マイクロインジェクションは、生きている組織における単一の神経幹細胞とその子孫を追跡および操作し、生理学的環境における系統進行に従うことを目的としています。本稿では、マウステレセファロンのオルガノミピックスライスを標的化し、自動的にマイクロインジェクションするためのマイクロインジェクションロボットの使用を実証しました。 図2 は、正常に注入された前駆細胞の代表的な画像を示し、 図3 は、注入された新生児ニューロンを示す。デキストランAlexa-488(またはAlexa-A555)染料を注入すると、細胞は染料で完全に満たされて表示されます。有端な前駆体(図2)の共焦点イメージングは、高い空間分解能で細胞形態、有端および基底付着の有無を再構成し、形態学的問い合わせをマーカー発現と組み合わせることを可能にする。これらの基準を組み合わせることで、ユーザは、マイクロ注入された細胞およびその子孫に特定の細胞運命を割り当てることができます。ニューロン注射に関しては、ユーザーは、アペカルデンドライトおよび軸索の構造および特徴を含む神経形態を再構築することができる。自動マイクロインジェクションは、手動マイクロインジェクションと比較して、大幅に高いスループットを提供できます (図 2B)。また、EdU標識は、細胞の生存率が自動化の影響を受けないことを確認する(図2C)。培養中にorganotypicスライスを保持することで、微量注入細胞の系統進行を次に示す( 図2Dの4〜24hを示す)。マイクロインジェクション溶液に遺伝物質(DNA、mRNA、CRISPR-Cas9ガイド)または組換えタンパク質が含まれている場合、これは系統進行が操作によって影響を受けるかどうか、そしてどのように影響するかを研究することを可能にする。
組織における単一神経幹細胞へのマイクロインジェクションは、優れた単一細胞分解能を提供し、そのために神経幹細胞の進行と運命遷移の細胞生物学を解剖するために使用されてきた(図3A)。マイクロインジェクションは、化学物質の複雑な混合物の配信を可能にします。我々は以前、ギャップ-接合性透過性とギャップ接合不透過性蛍光色素12を混合することによって神経前駆細胞における結合結合を研究するためにこの特徴を利用した。我々は、Dextran-A555と共にルシファーイエローを注入することによって、新生児ニューロンの接合結合を研究することによって、以前の研究を拡張した(図3B)。図3Bに示すように、新生児の錐体ニューロンの割合は、隣接するニューロンへのギャップ接合部を介して結合される。この観察は、未熟なニューロンがギャップ接合13、14を介して通信するという考え方と一致している。さらに、標的ニューロンは、マイクロインジェクションロボットの使用が、発達中の哺乳類脳内のいくつかの細胞型に一般化できることを示している。この実験的なセットアップは、例えばタンパク質とタンパク質相互作用を妨害する特定のオリゴペプチドを送達することによって、組織におけるニューロンの細胞生物学を解剖するのに有用であろう。
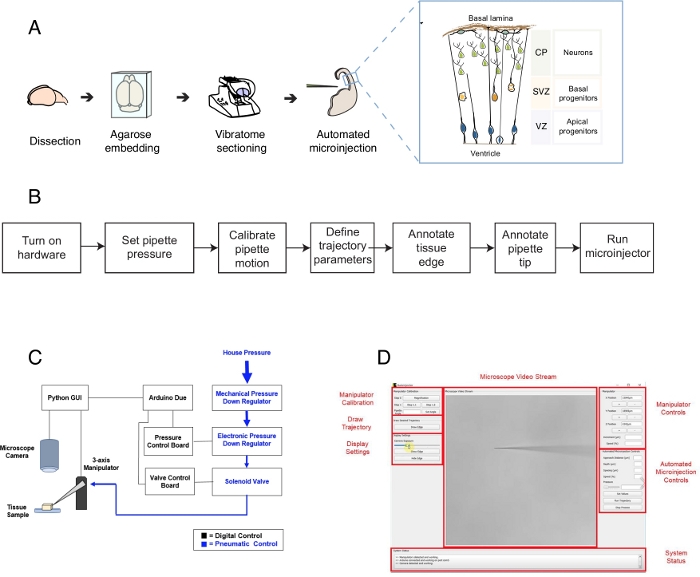
図1:自動マイクロインジェクションのセットアップとプロトコル(A) マイクロインジェクションロボットを用いた組織準備と自動マイクロインジェクションの総合プロトコル。右のインセット:このプロトコルでマイクロインジェクションをターゲットにしたマウステレンセバロンの漫画の概略。(B)自動マイクロインジェクションステップのフローチャート。(C)マイクロインジェクションロボットハードウェアの概略図。(D) マイクロインジェクションロボットの制御と操作に使用されるソフトウェアのグラフィックユーザーインターフェース(GUI)この図はref.12から適応されます。 この図の大きなバージョンを表示するには、ここをクリックしてください。
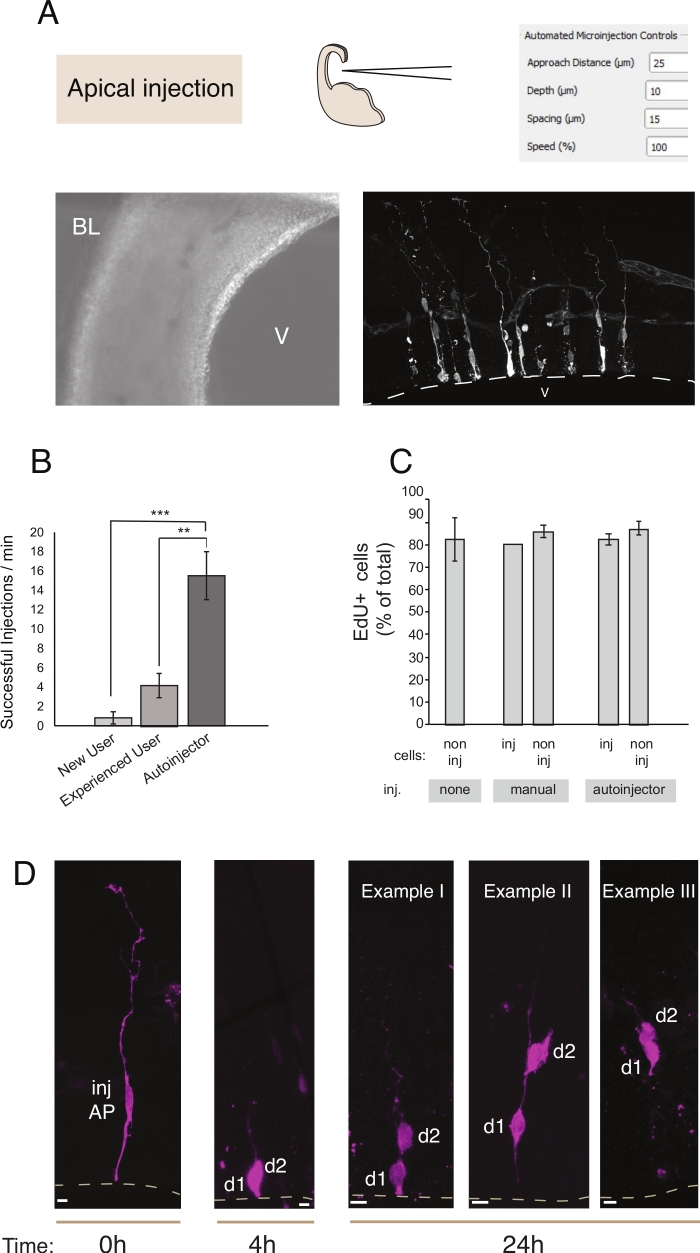
図2:アプリカル前駆体へのロボットマイクロインジェクションマイクロインジェクションロボットを使用して、アプリカルサーフェス(アプリカルインジェクション)を介してアプリカル前駆子(AP)をターゲットにした場合の概略および予想結果。(A) 一番上の行。左側:プロセスの概略。右側: アペカルインジェクションに関連するパラメータを持つ GUI。一番下の行。左:射出処理中に撮影した位相コントラスト画像(V:心室;BL:基底層層)。右側:マイクロインジェクションAPを示す代表的な結果。破線は心室(V)を表す。スケールバー:10μm(B)手動マイクロインジェクションシステムの初心者ユーザー、手動マイクロインジェクションシステムの経験豊富なユーザー、マイクロインジェクションロボットの1分間に成功した注射。(C)マイクロインジェクション細胞及び注入された領域の非注入細胞にEdUの組み込み。マウスE14.5後尻腸のオーガノミピックスライスは、(i)非注入または(ii)Dextran-A488(手動およびオートインジェクター用)を使用して手動または自動マイクロインジェクション(注入スライス)を施した。スライスは、24時間のEdUの存在下で培養中に保持され、その後、DAPIとEdUのために固定され、染色された。注入された領域に注入および非注入細胞は、EdU陽性について採点された。(D)マイクロインジェクションロボットリネージュトレースの使用。蛍光色素(Dx3-A555、マゼンタ)を単一神経幹細胞(t=0時間)に注入する。蛍光色素は、有糸分裂の間に娘細胞(d1,d2)に仕切られます。これにより、注入された細胞の子孫(t = 4 hおよび24時間)に従い、時間の経過に伴う系統の進行を明らかにすることができる。t = 24 h の場合、我々は見つけると予想される子孫の例をいくつか示す。スケールバー:10 μm。BとCのグラフはref.12から取り込まれますこの図のより大きなバージョンを表示するには、ここをクリックしてください。
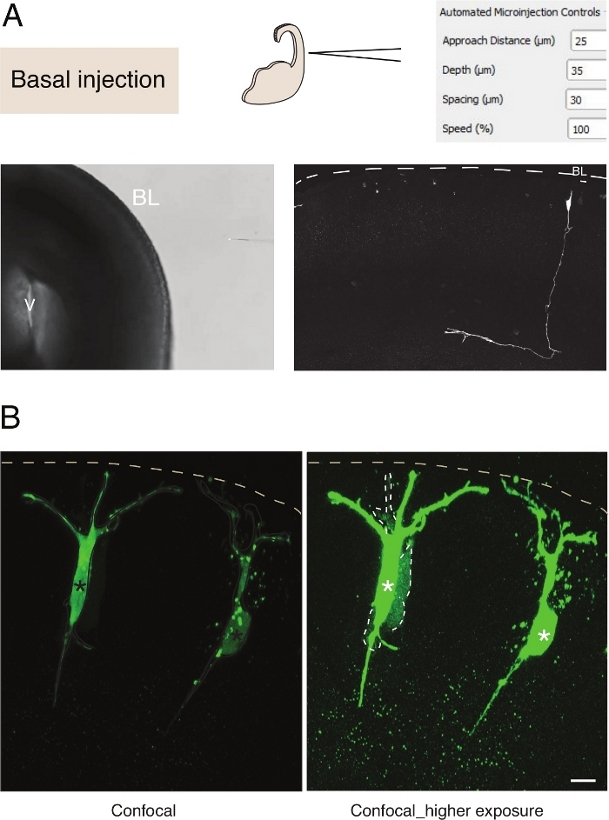
図3:ニューロンへのロボットマイクロインジェクションマイクロインジェクションロボットを使用して基底面(基底注入)を介してピラミッド型ニューロン(N)を標的とした場合の概略および予想結果。(A) 一番上の行。左側:プロセスの概略。右側: 基礎注入に関連するパラメータを持つ GUI。一番下の行。左:射出処理中に撮影した位相コントラスト画像(V:心室;BL:基底層層)。右: マイクロインジェクション N. 破線を示す代表的な結果は、基底層層(BL)を表します。スケールバー:10μm(B)オートインジェクターを使用して、組織におけるギャップ接合通信を研究する。ピラミッド型ニューロンには、ギャップ接合間不透過性Dx-A555(図示せず)とギャップ・ジャンクション透膜性ルシファー・イエロー(緑色)の2つの色素を含む溶液を注入した。Dx-A555 は対象セル (アスタリスク) に限定され、LY はギャップジャンクションを介してターゲット セル (破線) に接続されたセルに拡散します。左パネル: 低露出、マイクロインジェクション細胞のみが表示されます。右パネル: 高い露出は、注入されたセルだけでなく、結合されたセル(破線)の可視化を可能にします。スケールバー:10 μm. この図の大きなバージョンを表示するには、ここをクリックしてください。
補助ファイル: マイクロインジェクション中に発生する一般的なエラーのトラブルシューティング。このファイルをダウンロードするには、ここをクリックしてください。
組織における単一の神経幹細胞へのマイクロインジェクションは、優れた単一細胞分解能を提供し、そのために神経幹細胞の進行と運命遷移の細胞生物学を解剖するために使用されてきた(図2;10,11,12も参照)。自動マイクロインジェクション手順は、胚性マウスおよびヒト脳組織の両方の他のタイプの細胞に対して行うことができる。テレンスファロンの基底面を標的とした新生児ニューロンのマイクロインジェクションの代表的な結果を図3に示す。
ここで確立された原理は、胚性マウス脳およびヒト脳におけるいくつかの異なる細胞型を標的に適用することができる。我々は以前、マイクロインジェクションロボットがマウス後脳およびテレンセバロンおよびヒト新皮質12の新生児ニューロンの単一の前駆細胞を標的にすることもできることを示した。注射手順の最良の結果を得るためには、注射を開始する前にすべての手順を最適化する必要があります。脳組織から生存可能でよく保存された組織組織スライスの調製を慎重に検討し、最適化することが重要です(図1)。図 1に示す解剖とスライスの手順を迅速に行うことは非常に重要です。AP をターゲットとするアピカル インジェクションの場合、アピカル サーフェスの理想的な方向を示すスライスを選択する必要があります。AP の注入の場合、理想的な方向はペトリ皿の底に垂直な尖形表面である。他の向きも同様に寛容になりますが、ペトリ皿に垂直な尖方面は射出のためのより広い表面積を提供し、注射の成功を高めます。ニューロンへの注入の場合、スライスの向きはほとんど効果がありません。
注入するスライスが選択されると、スライスごとの注入手順は約5分かかります。1つは、生体組織で動作することを考慮, それは注射手順をスピードアップすることが強くお勧めします.この目的のために、不必要な待ち時間を減らすために、GUI(図1D)を介して注入するためのすべてのパラメータを設定することをお勧めします。トラブルシューティングについては、補足ファイルを参照してください。
長期スライス培養の場合、自動マイクロインジェクション手順の後のステップは、細胞の健康に影響を及ぼし、それによって実験を行う。そのため、品質管理テストを実行し、スライスのカルチャ条件を最適化することを強くお勧めします。スライスおよび注入手順の後の細胞生存率を評価するために、培養中にEdU標識を行い、培養および注入組織12におけるピノスティック核(アポトーシス細胞のプロキシ)の数を定量した。これらの定量は、組織の生存率に対するマイクロインジェクションの有意な影響を明らかにしなかった(図2C)。ラボで、組織語の組織スライスとマイクロインジェクションパイプラインを確立しながら、同様の品質管理を実行することをお勧めします。
手動マイクロインジェクションと比較して、マイクロインジェクションロボットはいくつかの利点を提供します。まず、ユーザーの学習曲線は手動注入と比較して急ではありません:新しいユーザーは、限られたセッション数(通常は1または2)の後に高い能力に達します。第二に、手動マイクロインジェクションの場合、同等の熟練度は数ヶ月の訓練を必要とする。射出手順は、より速く、より効率的です(図2B)。我々は、これらのパラメータを定量化し、マイクロインジェクションロボットが注入の成功(成功した注射/注射の総数の割合)と単位時間あたりの注入の総数に関して熟練した手動ユーザーを上回ることを発見した。これにより、マイクロインジェクションロボットの注入効率が、熟練したユーザーと比較して全体で300%増加します(成功した注入/分の割合)。マイクロインジェクションロボットを初心者ユーザーと比較すると効率の向上がさらに顕著になり、700%に達しました。最後に、マイクロインジェクションロボットは、すべての空間パラメータを体系的に探索するように簡単にプログラムすることができます。これは、マイクロインジェクションロボットを新しい細胞や組織を標的にしたり、異なる空間分解能を必要とする目的でマイクロインジェクションロボットを使用したりする場合に特に有利です。
マイクロインジェクションロボットを構築するには、既存のエピ蛍光顕微鏡12への変更を最小限に抑える必要がある。私たちは以前、この適応のための指示をhttps://github.com/bsbrl/Autoinjectorで提供しました。ハードウェアがセットアップされると、このプロトコルは、自動マイクロインジェクションを正常に実行するための主要な方法論的詳細を提供します。全体として、マイクロインジェクションロボットの注射速度は15.52 + 2.48で、経験の浅いユーザー(1.09±0.67注射/分)より15倍大きく、エキスパートユーザー(4.95±1.05注射/分)12よりも3倍大きい。成功した注入率のこの改善は、組織の生存率を維持するために不可欠である短い時間でより多くの細胞を注入する初心者と専門家のユーザーの両方を力に.さらに、マイクロインジェクションロボットはカスタマイズ可能であり、軌道、射出の深さ、注入の数、注入の間隔はすべてGUIを使用して調整することができる。これらの機能により、マイクロインジェクションロボットをツールとして使用して、以前の作業性の高い実験を最適化し、以前よりも高い収量を必要とする根本的に新しい実験を探求することができます。
ここで説明したマイクロインジェクション手順の主な制限は、組織スライスの調製に関連しており、大規模な最適化が必要な重要なステップです。さらに、マイクロインジェクションは、ガラスピペットによって接近することができる表面の存在に依存する。この機能は、現在のセットアップを使用してマイクロインジェクションを介して標的とすることができる組織および組織の位置のタイプを制限する。
マイクロインジェクションロボットは現在、明視野イメージングを使用し、インビトロ脳スライス製剤に使用されています。将来的には、マイクロインジェクションロボットを2光子イメージングと組み合わせて、分子タグ付けや色素タグ付けのための生体内での単一細胞ターゲティングの特異性を高めることができる。このような努力は、単一細胞の電気生理学15、16のために既になされている。現在の装置はマイクロ注入プロシージャの手動観察を要求する。将来のバージョンには、詰まったマイクロインジェクションピペット17を洗浄するための戦略や、多重化された完全自律マイクロインジェクションのための流体ハンドリングロボット18の統合が含まれる可能性があります。これらのデバイスは、マイクロインジェクションの規模を桁違いに増加させる可能性があります。複数のマイクロインジェクションピペット19の並列制御のためのアルゴリズムを適応させることは、同じ実験の中で同じ細胞に数十種の色素および分子試薬の多重化された送達を可能にする可能性がある。これは、組織の分子スクリーニングのための新しい道を開く可能性を秘めています。
マイクロインジェクションロボットは、DNAまたはRNAバーコードを使用して機能的に同定された細胞にタグを付けるために使用することができます。これは、単一細胞RNAシーケンシング(scRNAeq)および電子顕微鏡法などの他の単一細胞分析技術と組み合わせることができます。我々の予備的な結果は、微小注入された細胞とその子孫を回復し、組織解離を使用して単離し、続いてFACS分類(タベルナ、未発表の結果)を示している。FACS ソートされたセルは、scRNAeq に使用できます。さらに、マイクロインジェクションロボットの単一細胞分解能を電子顕微鏡解析と組み合わせて使用して、高い空間分解能(タベルナおよびウィルシュ・ブロイニンガー、未発表の結果)で組織中の神経幹細胞の細胞生物学を探索できることが予備的な結果で明記されています。これらのデータは、微小インジェクションロボットが、組織における相関光および電子顕微鏡のツールとして、より広い意味で、組織における細胞同一性および挙動のマルチモーダル分析に使用できることを示唆している。
マイクロインジェクションは圧力の使用に依存しており、分子複雑度の高い溶液(例えば、トランスクリプトーム全体)を注入する余裕があります。マイクロインジェクションのこの特徴は、リガンドゲート受容体20を単離しクローニングするために過去に利用されてきた。このラインに沿って、マイクロインジェクションロボットは、細胞レベルで多元的な形質をモデル化し、研究するために使用される可能性があります。サブプール戦略と組み合わせることで、マイクロインジェクションロボットは、特定の形質/細胞挙動を駆動する遺伝子の最小セットを識別するためのプラットフォームとしても使用される可能性があります。これまで、マイクロインジェクションロボットは、mRNA、DNAまたは組換えタンパク質10、21、22の送達を介して細胞の生化学を操作するために使用されてきた。マイクロインジェクションロボットは、細胞内空間の生物物理学を調査する際、例えば、細胞内空間の生体物理特性のセンシングや操作を可能にするナノ材料やナノマシンを提供する場合に、その応用を予見する。
著者らは開示するものは何もない。
著者たちはノミス財団(ET)を認めたいと考えています。SBKは、ミネソタ大学のMnDRIVE RSAMイニシアチブ、ミネソタ大学高等教育科、国立衛生研究所(NIH)1R21NS103098-01、1R01NS1111028、1R34NS1116888、1R21NS112886666および1R211111Rの機械工学部門からの資金を認めています。GSは、国立科学財団大学院研究フェローシップとNSF IGERTトレーニング助成金によって支援されました。
| Name | Company | Catalog Number | Comments |
| Chemicals | |||
| Agarose, Low Melt | Carl Roth | Cat# 6351.2 | |
| Agarose, Wild Range | Sigma-Aldrich | Cat# A2790 | |
| Best-CA 221 Glue | Best Klebstoffe GmbH & Co.KG | Cat# CA221-10ml | |
| B-27 Supplement | Thermo Fisher Scientific | Cat# 17504044 | |
| Cellmatrix Type-IA (Collagen, Type !) | FUJIFILM Wako Chemicals | Cat# 637-00653 | |
| Distilled Water | |||
| DMEM-F12, CO2 independent (w/o Phenol red) | Sigma-Aldrich | Cat# D2906 | |
| DMEM-F12, CO2 independent (with Phenol red) | Sigma-Aldrich | Cat# D8900 | |
| HEPES-NAOH, pH 7.2, 1M (HEPES buffer) | Carl Roth | Cat# 9105.3 | |
| L-Glutamine, 200 mM | Thermo Fisher Sientific | Cat# 25030024 | |
| Mowiol 4-88 | Sigma-Aldrich | Cat# 81381 | |
| N-2 Supplement | Thermo Fisher Scientific | Cat# 17502048 | |
| Neurobasal Medium | Thermo Fisher Scientific | Cat# 21103049 | |
| Nuclease-free water | Thermo Fisher Scientific | Cat# AM9937 | |
| O2 (40%), CO2 (5%), N2 (55%) Mix, 50 liters | |||
| Paraformaldehyde | Merck | Cat# 818715 | |
| PBS | |||
| Penicillin-Streptomycin (10,000 U/mL) | Thermo Fisher Scientific | Cat# 15140122 | |
| Rat serum | Charles River Laboratories | ||
| Japan | |||
| Sodium bicarbonate (NaHCO3) | Merck | Cat# 106323 | |
| Sodium hydroxide (NaOH) | Merck | Cat# 106482 | |
| Tyrode’s salt | Sigma | Cat# T2145-10x1L) | |
| Equipment | |||
| Borosilicate glass capillaries, 1.2 mm outer diameter x 0.94 mm inner diameter | Sutter Instruments | Cat# BF-120-94-10 | |
| Bottle-top filter system, 500 mL | Corning | Cat# 430769 | |
| Computer PC | |||
| Custom pressure rig | Custom pressure rig | ||
| Electronic pressure regulator | Parker Hannifin | Cat# 990-005101-002 | |
| Falcon tubes, 15 mL | Corning | Cat# 430791 | |
| Falcon tubes, 50 mL | Corning | Cat# 430829 | |
| Fine-tip paintbrush | |||
| Flaming/ Brown micropipette puller | Sutter Instruments | Cat# P-97 | |
| Forceps, Dumont no. 3 | Fine Science Tools | Cat# 11231-30 | |
| Forceps, Dumont no. 5 | Fine Science Tools | Cat# 11255-20 | |
| Forceps, Dumont no. 55 | Fine Science Tools | Cat# 11252-20 | |
| Heating block | Labtech International | Cat # Dri block Digi2 | |
| Inverted fluorescence microscope | Zeiss | Cat# Axiovert 200 | |
| Light source | Olympus | Cat# Highlight 3100 | |
| Manual pressure regulator | McMaster Carr | Cat# 0-60 PSI 41795K3 | |
| Microloader Tips | Eppendorf | Cat# 5242956.003 | |
| Microcontroller | Arduino | Cat# Arduino Due | |
| Microscope camera Hamamatsu Orca Flash 4.0 V3 | |||
| Motorized stage XY for microscope | |||
| Multiwell plate, 24 wells | Nunc | Cat# 142475 | |
| Pasteur pipettes, plastic | |||
| Petri dish, 60 x 15 mm | Greiner | Cat# 628102 | |
| Petri dish, 35 x 10 mm | Nunc | Cat# 153066 | |
| Petri dish, 34 x 14 mm, including Microwell no. 1.5 cover glass | MatTek | Cat# P35G-1.5-14-C | |
| Pipette holder | Warner Instruments | Cat# 64-2354 MP-s12u | |
| Pipette and tips | |||
| Puller filament, 3.0-mm square box filament | Sutter Instrument | Cat# FB330B | |
| Slice culture incubation box | MPI-CBG | Cat# custom made | |
| Solenoid valve | Cat# LHDA053321H-A | ||
| Stereomicroscope | Olympus | Cat# SZX12 | |
| Tabletop centrifuge | Heraeus | Cat# 5431622 | |
| Thermometer | |||
| Three-axis Manipulator | Sensapex Inc | Cat# tree-axis uMP | |
| Vibratome | Leica | Cat# VT1000s | |
| Whole-embryo-culture-system incubator | Ikemoto Company | Cat# RKI-10-0310 | |
| Waterbath | |||
| Software and Algorithms | |||
| Arduino | Arduino | ||
| Fiji | RRID: SCR_002285 | ||
| Python | Python Software foundation | Python 2.7.12 | |
| ZEN | RRID: SCR_013672 |
- Taverna, E., Götz, M., Huttner, W. B. The Cell Biology of Neurogenesis: Toward an Understanding of the Development and Evolution of the Neocortex. Annual Review of Cell and Developmental Biology. 30 (1), 465-502 (2014).
- Götz, M., Huttner, W. B. The cell biology of neurogenesis. Nature Reviews Molecular Cell Biology. 6 (10), 777-788 (2005).
- Di Lullo, E., Kriegstein, A. R. The use of brain organoids to investigate neural development and disease. Nature Reviews Neuroscience. 18 (10), 573-584 (2017).
- Lancaster, M. A., Knoblich, J. A. Organogenesisin a dish: Modeling development and disease using organoid technologies. Science. 345 (6194), 1247125 (2014).
- Kretzschmar, K., Clevers, H. Organoids: Modeling Development and the Stem Cell Niche in a Dish. Developmental Cell. 38 (6), 590-600 (2016).
- Pepperkok, R. et al. Automatic microinjection system facilitates detection of growth inhibitory mRNA. Proceedings of the National Academy of Sciences of the United States of America. 85 (18), 6748-6752 (1988).
- Pepperkok, R., Lowe, M., Burke, B., Kreis, T. E. Three distinct steps in transport of vesicular stomatitis virus glycoprotein from the ER to the cell surface in vivo with differential sensitivities to GTPγS. Journal of Cell Science. 111 (13), 1877-1888 (1998).
- Pepperkok, R. et al. β-COP is essential for biosynthetic membrane transport from the endoplasmic reticulum to the Golgi complex in vivo. Cell. 74 (1), 71-82 (1993).
- Ansorge, W., Pepperkok, R. Performance of an automated system for capillary microinjection into living cells. Journal of Biochemical and Biophysical Methods. 16 (4), 283-292 (1988).
- Taverna, E., Haffner, C., Pepperkok, R., Huttner, W. B. A new approach to manipulate the fate of single neural stem cells in tissue. Nature Neuroscience. 15 (2), 329-337 (2012).
- Wong, F. K., Haffner, C., Huttner, W. B., Taverna, E. Microinjection of membrane-impermeable molecules into single neural stem cells in brain tissue. Nature Protocols. 9 (5), 1170-1182 (2014).
- Shull, G., Haffner, C., Huttner, W. B., Kodandaramaiah, S. B., Taverna, E. Robotic platform for microinjection into single cells in brain tissue. EMBO Reports. 20 (10), e47880 (2019).
- Jabeen, S., Thirumalai, V. The interplay between electrical and chemical synaptogenesis. Journal of Neurophysiology. 120 (4), 1914-1922 (2018).
- Nagy, J. I., Pereda, A. E., Rash, J. E. Electrical synapses in mammalian CNS: Past eras, present focus and future directions. Biochimica et Biophysica Acta - Biomembranes. 1860 (1), 102-123 (2018).
- Suk, H.J. et al. Closed-loop real-time imaging enables fully automated cell-targeted patch-clamp neural recording in vivo. Neuron. 95 (5), 1037-1047 (2017).
- Annecchino, L. A. et al. Robotic automation of in vivo two-photon targeted whole-cell patch-clamp electrophysiology. Neuron. 95 (5), 1048-1055 (2017).
- Kolb, I. et al. Cleaning patch-clamp pipettes for immediate reuse. Scientific Reports. 6, 35001 (2016).
- Holst, G. L. et al. Autonomous patch-clamp robot for functional characterization of neurons in vivo: development and application to mouse visual cortex. Journal of Neurophysiology. 121 (6), 2341-2357 (2019).
- Kodandaramaiah, S. B. et al. Multi-neuron intracellular recording 1 in vivo via interacting autopatching 2 robots. ELife. 7, 24656 (2018).
- Lubbert, H. et al. cDNA cloning of a serotonin 5-HT1c receptor by electrophysiological assays of mRNA-injected Xenopus oocytes (RNA fractionation/hybrid depletion/hybrid selection/choroid plexus/voltage clamp). Neurobiology. 84 (2) 4332-4336 (1987).
- Florio, M. et al. Human-specific gene ARHGAP11B promotes basal progenitor amplification and neocortex expansion. Science. 347 (6229), 1465-1470 (2015).
- Kalebic, N. et al. CRISPR/Cas9-induced disruption of gene expression in mouse embryonic brain and single neural stem cells in vivo. EMBO Reports. 17 (3), 338-348 (2016).
Tags
ABOUT JoVE
Copyright © 2024 MyJoVE Corporation. All rights reserved