
Method Article
Aktif Yerden Kaçınma (APA) testi, fareler için etkili, çok yönlü ve tekrarlanabilir bir uzamsal öğrenme görevi
Bu Makalede
Özet
Burada, kemirgenler için tasarlanmış hipokampusa bağlı bir mekansal öğrenme paradigması olan aktif yerden kaçınma testi için bir protokol sunuyoruz. Anahtar parametrelerin değiştirilmesi, hayvanların tedavilerden önce ve sonra veya zaman içinde yeniden test edilmesine olanak tanır.
Özet
Kemirgenlerde hipokampusa bağlı uzamsal öğrenme, çeşitli yöntemler kullanılarak test edilmiştir. Bunlar arasında Morris su labirenti (MWM), Y-labirenti ve yeni nesne konumu (NOL) görevleri bulunur. Daha yakın zamanlarda, aktif yerden kaçınma (APA) görevi, bu daha geleneksel yaklaşımlara bir alternatif olarak geliştirilmiştir. APA görevinde, fareler, sabit bir şok bölgesinden kaçınmak için dönen bir arenanın etrafına yerleştirilmiş uzamsal ipuçlarını kullanmalıdır. Ayarlanabilen çoklu parametreler nedeniyle, APA görevinin çok yönlü bir yaklaşım olduğu gösterilmiştir. Aynı fare kohortu için uzunlamasına ve tekrar tekrar kullanılmaya elverişlidir. Burada, APA görevini başarılı bir şekilde yürütmek için ayrıntılı bir protokol sunuyoruz. Ayrıca, uzamsal öğrenmenin farklı bileşenlerini incelemek için kullanılabilecek alternatif APA yaklaşımlarını da vurguluyoruz. Veri toplama ve analiz süreçlerini anlatıyoruz. Testin başarılı bir şekilde yürütülmesi olasılığını artırmak için APA görevi sırasındaki kritik adımlar tartışılmaktadır. APA görevi, daha geleneksel uzamsal navigasyon testlerine göre çeşitli avantajlara sahiptir. Yaşlı farelerde veya Alzheimer hastalığı gibi hastalık fenotiplerine sahip farelerde kullanılması uygundur. Görevin karmaşıklığı kolayca değiştirilebilir ve çok çeşitli fare türlerinin test edilmesine olanak tanır. Ayrıca, APA görevi, felç veya travmatik beyin hasarı gibi motor veya nöral işlevi etkilemiş olabilecek ameliyat veya deneysel müdahaleler geçirmiş hayvanları test etmek için uygundur.
Giriş
Aktif yerden kaçınma (APA), kemirgenlerde hipokampusa bağlı uzamsal öğrenmeyi test etmek için etkili bir araçtır 1,2,3,4. APA görevi sırasında, hayvan dönen bir arenaya yerleştirilir ve kendilerini yönlendirmek ve caydırıcı bir şok bölgesinden kaçınmak için görsel ipuçlarını kullanması gerekir5. Arenanın dönüşü, farenin navigasyon için aptalca bir yaklaşım kullanamamasını ve koku işaretlerinin kullanılamamasını sağlar, çünkü bu ipuçları şok bölgesi sabit kalırken platform üzerinde döner5. Arenanın hızını ve yönünü, ayrıca şok bölgesinin konumunu ve görsel ipuçlarını değiştirmek, farelerin birden çok kez yeniden test edilmesine olanak tanır 6,7,8. APA, en yaygın kullanılan uzamsal öğrenme testlerinden biri olan Morris su labirentine (MWM) kıyasla birkaç farklı avantaj sunar. Daha da önemlisi, fareler yüzmeye karşı bir isteksizliğe sahiptir ve MWM görevini son derece stresli bulurlar9. Ayrıca, yaşlı farelerin MWM görevi10 sırasında yüzdüğü bildirilmiştir, bu da onu birçok durumda uzamsal bir öğrenme görevi olarak uygun hale getirmez. Ayrıca, MWM görevi, farelerin test sırasında bulunması için gizli, batık bir platform gerektirdiğinden. Bu, suyun opak olmasını gerektirir ve bu da tipik olarak beyaz boya ilavesiyle elde edilir. Davranışsal görevler sırasında hayvanların izlenmesi ve analizi, İsviçre veya BALB/c gibi belirli fare suşlarının MWM'de test edilmesini hariç tutarak, denek ve çevresi arasında yeterli kontrast gerektirir. APA görevinde, ızgaranın altına siyah plastik eklenerek bu sorun aşılır.
Uzamsal öğrenmeyi test etmek için birden fazla APA paradigması tasarlanmıştır ve etkili bir davranışsal araç olarak faydasını göstermiştir. Örneğin, uzamsal öğrenmenin edinimi, tutulması ve pekiştirilmesi tipik olarak 3-5 gün arasında değişebilen hayvanların günlük testleriyle gerçekleştirilir 6,7,11,12. Hafıza ve öğrenme, her edinim gününde alınan şok sayısı karşılaştırılarak ölçülür. İlk girişe kadar geçen süre ve şok bölgesinden kaçınma süresi de görev sırasında öğrenme yeteneğindeki değişiklikleri belirlemek için kullanılabilecek önemli parametrelerdir. Alternatif olarak, uzamsal çalışma belleği, 30 dakikalık tek bir APA oturumu 2,13 gerçekleştirilerek test edilebilir, burada uzamsal öğrenme, 5 dakikalık bölmelerde şok sayısı gibi performansı karşılaştırarak oturum içi değişiklikler olarak ölçülür.
Bu makalede, APA görevini açıklıyoruz ve bu uzamsal öğrenme testini yürütürken dikkate alınması gereken temel özellikleri vurguluyoruz.
Protokol
Tüm hayvan prosedürleri, Avustralya Ulusal Sağlık ve Tıbbi Araştırma Konseyi'nin yönergeleri uyarınca Queensland Üniversitesi Hayvan Etik Komitesi tarafından onaylanmıştır (onay numarası: QBI/189/15).
1. APA oda kurulumu
NOT: APA aparatı, 32 cm yüksekliğinde şeffaf dairesel bir sınırla çevrelenmiş metal bir ızgara zemine sahip yükseltilmiş bir arena içerir. Metal çubuklar eşit aralıklarla yerleştirilmiştir (0,5 cm aralıklı) ve 0,3 cm çapa sahiptir.
- APA cihazının tavana monte edilmiş kamera çerçevesi içinde olduğundan emin olun. Piyasada bulunan hayvan izleme yazılımını kullanarak fareyi takip edin.
- APA arenası genellikle 1 rpm hızında döner ve dönen arena içinde önceden belirlenmiş 60° sabit bir şok bölgesi ayarlanır. Fare şok bölgesine girdiğinde, 0,5 mA (60 Hz, 500 ms) hafif bir ayak şoku verin.
- Test sırasında şok bölgesinin konumunun sabit kaldığından ve deney düzeneği içinde elektronik olarak ayarlandığından emin olun. Dönen arena, fare bundan kaçınmak için aktif olarak hareket etmedikçe, fareyi şok bölgesine taşır.
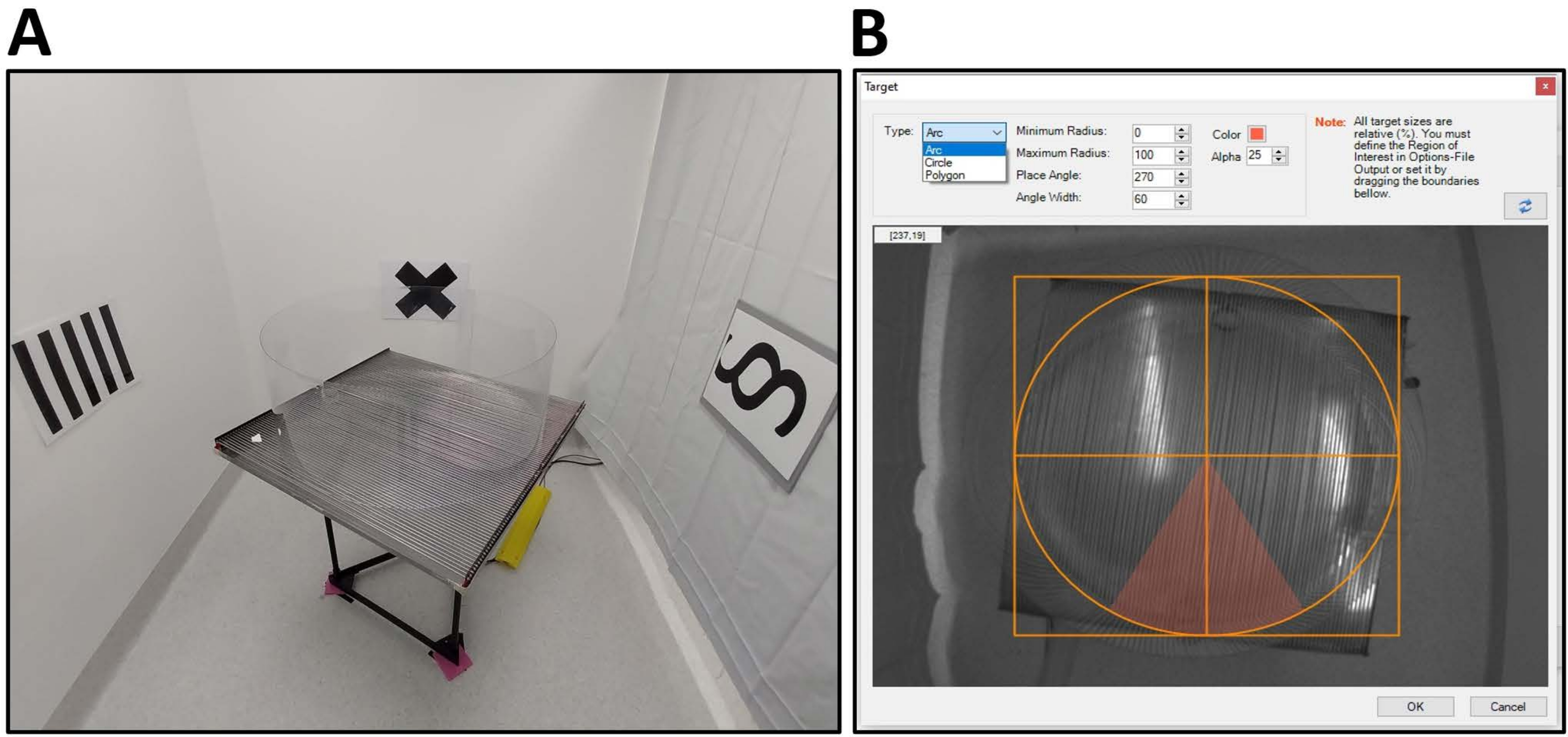
- Dört farklı oda duvarına, dönen platformla aynı yükseklikte, tipik olarak arenadan 30-50 cm uzakta dört yeni görsel ipucu yerleştirin. İpuçlarının siyah-beyaz semboller veya A3 kağıda basılmış ve kolay temizlik için lamine edilmiş şekiller gibi nötr renkler olduğundan emin olun (Şekil 1A).
- Odanın ışık yoğunluğunun 30-70 Lux arasında olduğundan emin olun. Işık yoğunluğunun artması kaygı benzeri davranışlara neden olur ve keşfi azaltır.
- Başlamadan önce Tracker programını açın ve APA görevini seçin.
- Tracker 2D Seçenekleri'nde, Deney sekmesini seçin. Burada, Yerden Kaçınma - Yalnızca Bir Kare Konumu'nun seçili olduğundan emin olun. Bu, gerekli parametrelerin yapılandırılmasına izin verecektir. Yapılandırma dosyasını kaydedin ve gerektiği gibi ayarlayın.
- Deneme sekmesinde, Deneme Zamanı kutusunda deneme süresini ayarlayın. Tipik bir deney süresi 600 s veya 10 dakikadır.
- Zamanlayıcıyı Etkinleştir'in seçili olduğundan emin olun. Zamanlayıcı bölgesindeki şok parametrelerini yukarıda açıklandığı gibi değiştirin.
- Deney sekmesinin Oda Çerçevesi bölgesinde sağlanan alana ortak deney ayrıntılarını girin. Örneğin, Varsayılan Çıktı Dosyası adının tarih, basit bir deneysel tanımlayıcı ve test günü ile doldurulduğundan emin olun. Deney sırasında benzersiz bir fare kimliğinin eklenmesine izin vermek için adı bir alt çizgi "_" ile bitirin.
- Oda Çerçevesi bölgesinde ayrıca Hedefler sekmesi bulunur. Tüm arenanın ilgilenilen bölgeye dahil edildiğinden emin olmak için Düzenle düğmesine tıklayın. Ardından, şok hedef bölgesinin boyutu ve konumu için ayarlanabilir parametreleri sağlamak üzere Arc'ı seçin (Şekil 1B).
- Farelerin başarılı bir şekilde izlenmesini sağlamak üzere parametreleri ayarlamak için İzleme sekmesini açın. Kontrast kutusu, hem karanlık (örneğin, C57Bl/6) hem de açık (örneğin, BALB/c) farelere izin vermek için Koyu veya Açık seçeneklere sahiptir. Bu, arka plan ve fareler arasında etkili bir kontrast oluşturur. Albino fare suşlarını kullanırken, bu kontrastın elde edilmesini sağlamak için arenanın altına bir parça siyah plastik yerleştirin (Şekil 2).
- Bu bölgedeki fare boyutunu ve alan aralıklarını ayarlayın. Arenadayken fareyi etkili bir şekilde tanımak için bu parametreleri ayarlayın. Alternatif olarak, Kalibratörden düğmesine bastıktan sonra bunları ayarlayın.
- Arenanın tamamen maskenin ilgilenilen bölgesinde olduğundan emin olmak için Kalibratörden düğmesini seçin.
- Arena döndüğünde arenanın maskede kaldığından emin olmak için bu sekmede arenayı başlatın. Bu sekme, uygun kontrast eşiğini seçmek için de kritik öneme sahiptir. Kontrast eşiğini ayarlamak için Eşik bölmesindeki kırmızı çizgiyi hareket ettirin.
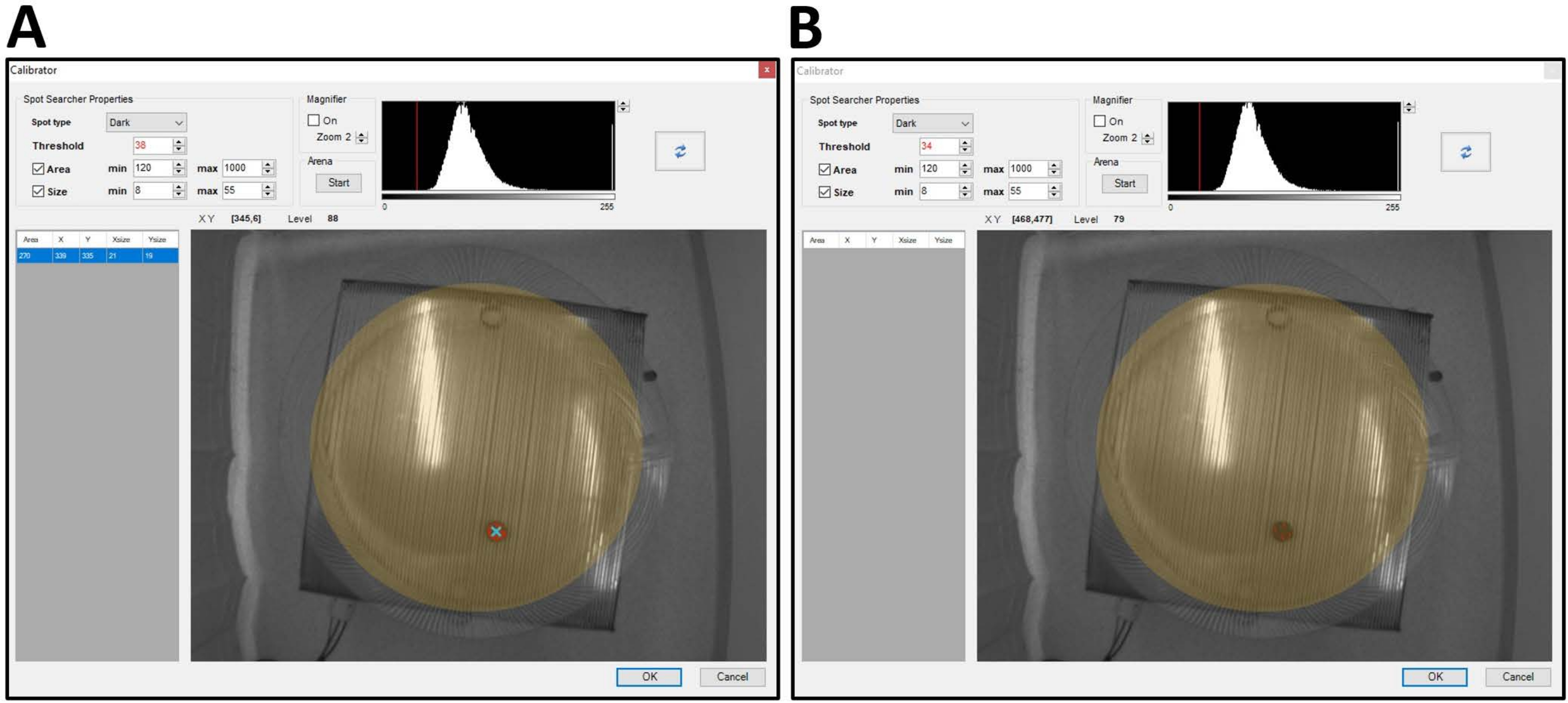
NOT: Şekil 3A , farenin bulunduğu yerde düz turuncu bir bölge ve mavi bir "X" ile kanıtlandığı gibi en uygun eşik seçimini göstermektedir. Şekil 3B'de zayıf bir eşik gösterilmiştir ve yalnızca benekli turuncu gösterir ve "X" yoktur.
- Arena döndüğünde arenanın maskede kaldığından emin olmak için bu sekmede arenayı başlatın. Bu sekme, uygun kontrast eşiğini seçmek için de kritik öneme sahiptir. Kontrast eşiğini ayarlamak için Eşik bölmesindeki kırmızı çizgiyi hareket ettirin.
- Cihazlar sekmesini kullanın ve hız düğmesini kullanarak arenanın dönüş yönünü ve hızını ayarlayın. Saat yönünde ve saat yönünün tersine dönüşleri temsil eden hem pozitif hem de negatif hızları seçin. Akım Kaynağı bölümünde şok yoğunluğunu ayarlayın. Fareler için en yaygın ayar 1 rpm dönüş ve 0,5 mA şoktur.
- Geçerli Kaynak sekmesinde şokların nasıl veya ne zaman verileceğini değiştirin.
- Geçerli modun Bağımlı İzle olarak seçildiğinden emin olun. Bu, fare şok bölgesine girdiğinde elektrik çarpmasına neden olur.
- Kullanıcı tarafından ayarlanan bir zaman aralığında şok vermek için Zaman'ı seçin. Dosyadan'ı seçerek fareyi şok etmek için önceden kaydedilmiş parçaları kullanın. Bu, uzamsal öğrenmeden bağımsız olarak aynı süre ve yoğunlukta aynı sayıda şoka maruz kalan boyunduruklu bir kontrol faresi sağlamak içindir.
NOT: File Output (Dosya Çıktısı) ve Window (Pencere) sekmeleri, veri ve video dosyalarının belirli bir dizine kaydedilmesine olanak sağlar. Dosya Çıktısı sekmesindeki Görüntüden düğmesi, ilgilenilen bölgenin seçilecek tüm arenayı yakalamasına da olanak tanır.
- Perdenin arkasına çekilin ve denemeye başlayın. Deneycinin arenaya yakın olması ve gereksiz gürültünün hayvan performansını etkilemesi mümkündür.
- Deneme sırasında herhangi bir gürültü ve kokunun sınırlı olduğundan emin olun, bu da fareye performanslarını etkileyen başka bir ipucu sağlayabilir. Bunu en aza indirmeye yönelik örnekler arasında kapalı bir klinik atık kutusunun sağlanması, gürültülü laboratuvar alanlarından çıkarılan odaların kullanılması ve fareler arasındaki ekipmanın iyice temizlenmesi yer alır. Araştırmacılar, ilgisiz dış gürültüleri maskelemek için beyaz gürültü üretecini kullanmayı düşünebilirler.
- Ev kafesi yatağının davranışsal test süresi boyunca aynı kalmasına izin verin, çünkü bu yeni bir stimülasyon sağlayabilir ve davranışı etkileyebilir.
- Günlük değişimleri önlemek için, her gün tutarlı bir zamanda test yapın.
2. Deneyci kullanımına alışma
- Testten önce her fareyi en az 2-3 gün boyunca her gün 30 saniye ila 1 dakika boyunca kullanın. Hayvanların ele alınması, test sırasında stres ve kaygı ile ilgili davranışları önemli ölçüde azaltır.
- Aynı laboratuvar önlüğünü kullanın ve alışkanlık ve test sırasında güçlü deodorantlar, kolonyalar veya parfüm kullanmaktan kaçının.
3. APA arenasına alışma (1 gün)
- Fareyi alışmak için antreye veya test odasına getirin. Fareyi en az 30 dakika alışmaya bırakın. Fareler alışmak için getirilmeden önce antrede veya test odasında ışık yoğunluğunu ayarlayın.
- Tracker yazılımını kurun.
- Denemeye özel bir klasör oluşturun. Deneysel paradigmaya bağlı olarak, her gün veya deneme için ayrı klasörlere sahip olun. Deneme yapılandırmalarını yukarıda açıklandığı gibi ayarlayın ve bu yapılandırmaları gelecekte kullanmak üzere kaydedin.
- Deneme sürümünü başlatmadan önce, Dosya sekmesine tıklayarak kaydedilen yapılandırmayı açın, ardından Kaydet sembolüne tıklayın, yeni açılan pencereye benzersiz bir fare kimliği ekleyin ve Oynat sekmesine basarak denemeyi çalıştırın.
- Fareyi, şok vermeden 5 dakika boyunca dönen arenaya maruz bırakarak APA aparatına alıştırın.
- Fareyi kuyruğunun tabanından kaldırarak ve eldivenli elin üzerine nazikçe yerleştirerek ev kafesinden çıkarın. Fareyi APA aparatına taşıyın ve duvara bakacak şekilde şok bölgesinden uzağa yerleştirin.
- Perdenin arkasına çekilin ve denemeye başlayın.
- Testin sonunda fareyi çıkarın ve ev kafesine geri dönün.
- Tüm idrarı ve dışkıyı toplayın ve ızgarayı %80 (h/h) etanol ile iyice temizleyin.
- Tüm fareler için 3.4-3.7 adımlarını tekrarlayın.
4. APA kullanarak edinim eğitimi (1-6 gün)
- Oda aydınlatmasını alışma günündekiyle aynı koşullara ayarlayın.
- Fareyi antreye veya test odasına getirin ve en az 30 dakika alışmasına izin verin.
- Tracker yazılımını yukarıda açıklandığı gibi kurun.
- Deneme süresini ayarlayın.
- Akım kaynağının açık olduğundan ve ayarlandığından emin olun (yani 0.5 mA).
- Fareyi arenanın üzerine, şok bölgesinden uzağa ve yüzü duvara dönük olarak yerleştirin.
- Perdenin arkasına çekilin ve Oynat düğmesine basarak denemeye başlayın. Bilgisayar ekranında fareyi izleyin ve gerekirse müdahale edin. Örneğin, fare aşırı zıplama veya ses çıkarma ile kanıtlandığı gibi şok almıyor veya aşırı stresli görünüyor.
- Testin sonunda fareyi çıkarın ve ev kafesine geri dönün.
NOT: Farelerin şokları aldığından ve bunlara tepki verdiğinden emin olun. Fareler şoka geri çekilerek ve ses çıkararak yanıt verir. Durum böyle değilse, şoku almıyor olabilirler. Bu, şebekedeki scat'ten veya yetersiz izlemeden kaynaklanıyor olabilir. Bu nedenle, yukarıda tartışıldığı gibi, her denemeden sonra ızgarayı temizlemek ve fare izlemeyi optimize etmek çok önemlidir.
5. Tersine edinme eğitimi (İsteğe bağlı, 1-6 gün)
- Tersine çevirme görevinde, şok bölgesini genellikle önceki konumdan 180° uzakta yeni bir konuma yeniden konumlandırın. Farenin yeni bir şok bölgesi konumunu esnek bir şekilde öğrenme yeteneğini değerlendirin. Oda ipuçları tipik olarak tersine öğrenme sırasında değiştirilmez.
- Tüm fareler için 3.4-3.7 adımlarını tekrarlayın.
6. Prob denemesi (İsteğe bağlı, 1 gün)
- Prob denemesinde, ilk girişe kadar geçen süreyi ve/veya şok bölgesinden kaçınma süresini ölçün.
NOT: Bu, edinme aşamasından sonra bellek konsolidasyonunu gösterir. İyi eğitimli bir fare, uzamsal öğrenmenin kanıtını göstererek uzun bir süre (>60 saniye) şok bölgesine girmekten kaçınacaktır. - Oda ışık yoğunluğunu satın alma eğitim günündeki gibi ayarlayın.
- Fareyi test odasında veya antrede 30 dakika boyunca alıştırın.
- Tracker yazılımını kurun.
- Deneme süresini, daha önce gerçekleştirilen test süresiyle aynı zamana ayarlayın (örneğin, deneme parametrelerine bağlı olarak 10 dakika veya 30 dakika).
- Bu deneme için şok vermeyin.
- Fareyi, itici şok bölgesinin karşı tarafına, yüzü duvara bakacak şekilde yerleştirin.
- Denemeyi başlatın ve perdenin arkasına çekilin.
- Farenin verimli bir şekilde izlendiğinden emin olun.
- Fareyi bilgisayar ekranında izleyin ve şok bölgesine girdiğinde denemeyi durdurun. Bazı araştırmacılar, farenin şok bölgesine geri dönmeye devam edip etmediğini görmek için denemeye 5 dakika devam etmeyi tercih ediyor.
- Fareyi yavaşça kaldırın ve ev kafesine geri dönün.
- Tüm idrar ve dışkının toplandığından ve ızgaranın %80 (h/h) etanol ile iyice temizlendiğinden emin olun.
7. Parça analizi
NOT: Görevin performansı, farklı izleme yazılımları aracılığıyla elde edilebilir. Aşağıda, APA görevi sırasında performansı belirlemek için dahil edilen yazılımın nasıl kullanıldığı anlatılmaktadır. Bu durumda, veriler İzleme Analizi programı kullanılarak analiz edilir.
- Verileri analiz etmek için Track Analysis programını açın ve ana penceredeki açılır menüden Kaçınma'yı seçin.
- Edinme aşamasında kaydedilen veri dosyalarını yeni bir pencereye yüklemek için Görev Ekle'ye tıklayın. Grup Adı'nda, analiz etmek için bir grup oluşturun, örneğin, Gün 1 veya analiz zamanı.
- Analiz edilen verilerin kaydedileceği konumu seçmek için Çıktı Dizini'ne tıklayın.
- Dosya Ekle sekmesine tıklayarak ve yerel sürücüden dosyaları seçerek analiz edilecek dosyaları ekleyin.
- Zamanı Ayarla sekmesine tıklayarak analiz edilecek zamanı ayarlayın. Bu, analiz edilecek periyodu, yani 0 ila 600 s'yi tanımlama yeteneği sağlar. Alternatif olarak, verileri kutularda, yani 60 s'de analiz edin.
- Tüm parçalar eklendikten sonra, Analiz sekmesine tıklayın ve verileri analiz etmek için Analizi Çalıştır'ı seçin. Analiz birkaç klasör üretecektir. Analiz için veriler TBLfiles klasöründe olacaktır. Bu veri dosyalarını bir elektronik tabloda açın ve daha fazla analiz için kullanın, yani ikili karşılaştırma veya tekrarlanan ölçümler ANOVA.
NOT: Analiz, test sırasında farelerin tek sayfalık bir açıklamasına sahip olacak, bir izleme haritasını ve şokların nerede alındığını gösteren PS dosyaları da dahil olmak üzere başka klasörler de üretecektir.
Sonuçlar
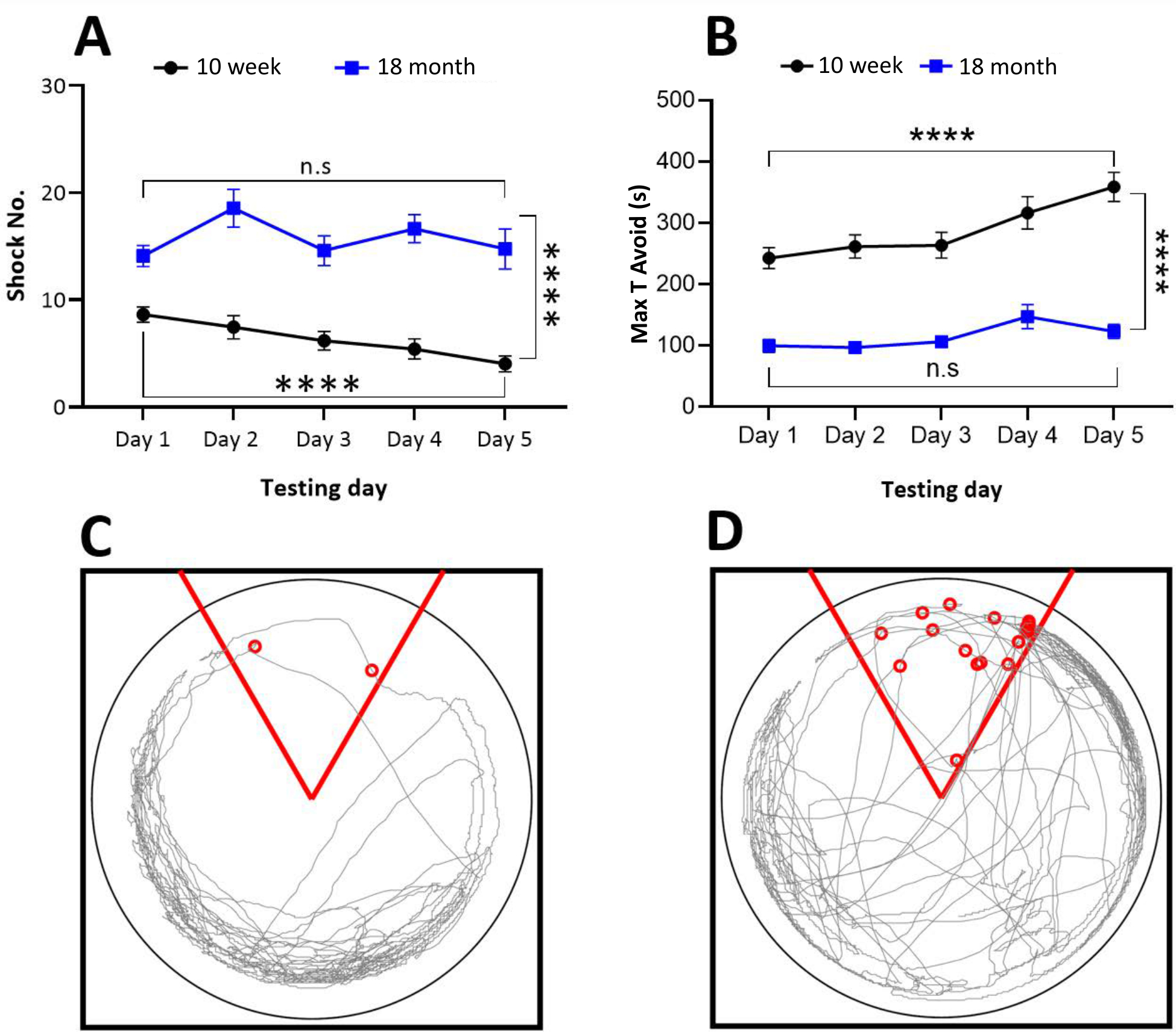
Bozulmamış uzamsal öğrenme yeteneğine sahip fareler, ardışık edinim denemeleri sırasında şok sayısında bir azalma gösterecektir (Şekil 4A). Benzer şekilde, fare şok bölgesinden başarılı bir şekilde uzaklaşmayı öğrendikçe şok bölgesinden kaçınma süresi artacaktır (Şekil 4B). Bununla birlikte, etkili bir kaçınma stratejisi öğrenemeyen fareler, her edinme denemesi için sabit sayıda şok gösterecektir (Şekil 4A). Çoğu zaman, şok bölgesini tanımlayamayan fareler, bölgeye her girişte birden fazla şok alır. İzleme haritaları, şok bölgesinden kaçınmayı öğrenen farelere (Şekil 4C) ve şok bölgesinden kaçınamayanlara (Şekil 4D) örnekler sağlamak için yararlıdır. Her iki durumda da, bu izleme haritaları edinimin son gününü temsil eder. Şekil 4C'deki fare, iki daire ile temsil edildiği gibi yalnızca 2 şok aldı. Ayrıca, izleme haritasının, farenin çoğu zaman kırmızı kama ile temsil edilen şok bölgesinin karşı tarafında geçirdiğini gösterdiğini unutmayın. Tersine, Şekil 4D'deki fare daha fazla şok aldı ve iz haritası düzensiz bir model ortaya koyuyor. Şok bölgesinden kaçınmayı başarılı bir şekilde öğrenemeyen farelere örnek olarak, 18 aylık fareler (Şekil 4A,B- Blackmore ve diğerleri, 20217'den modifiye edilmiştir), olgunlaşmamış nöronların kimyasal ablasyonu6 veya hipokampal lezyonlar (bkz. Codd ve diğerleri, 2020)8.
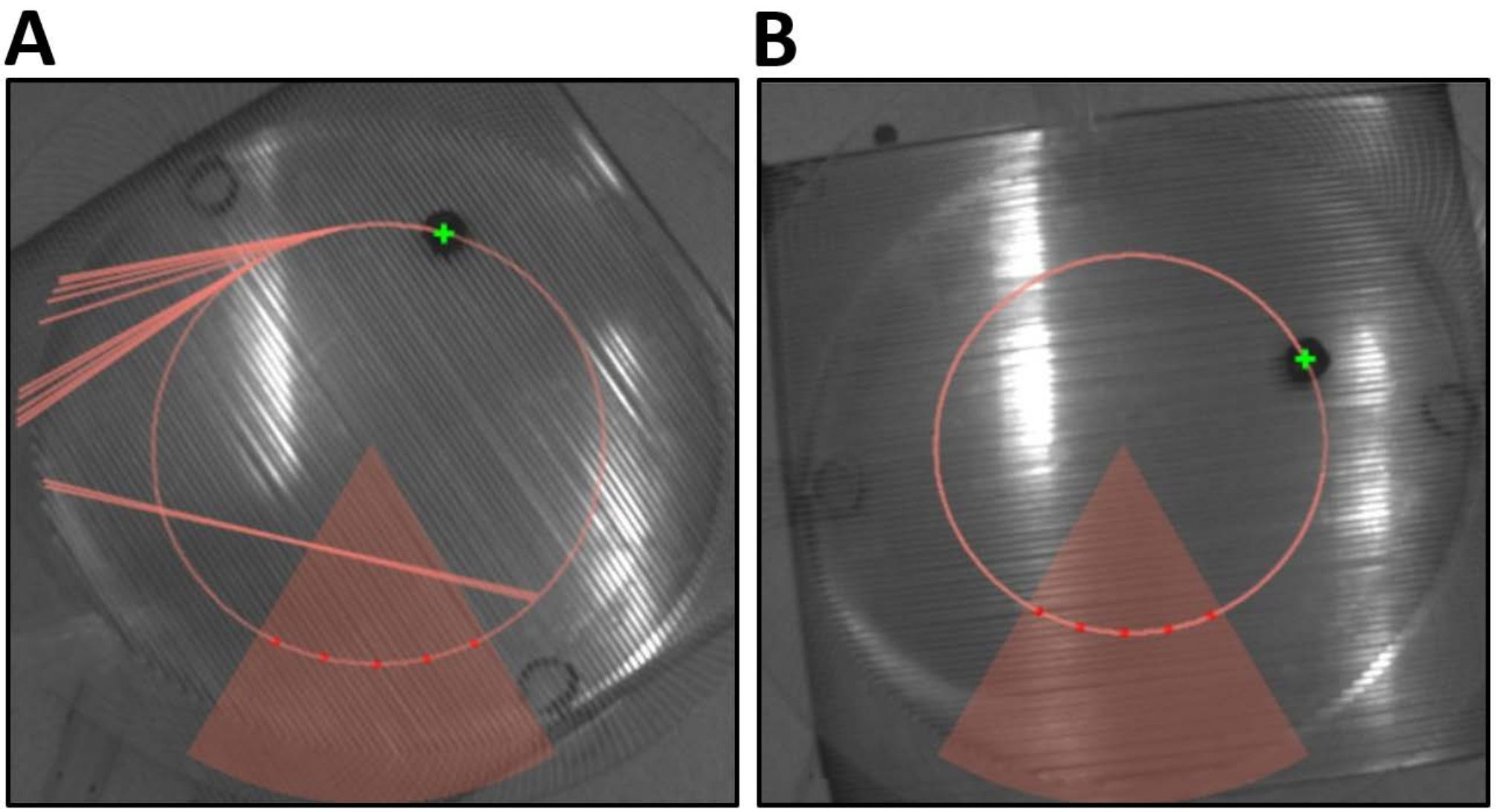
Ekipmanın kurulumundaki bir başarısızlığın aksine, farenin öğrenememesi nedeniyle başarısız bir deneme arasında ayrım yapmak önemlidir. Ekipman arızasından kaynaklanan kötü sonuçların en yaygın iki nedeni, farenin yetersiz izlenmesi (Şekil 5A) veya farenin şok almamasıdır. Kötü izleme, farenin şok bölgesindeyken bir şok almasını engelleyebilir. Alternatif olarak, zayıf izleme, fare bölgede olmadığında yanlış bir şekilde bir şoka neden olabilir. Her iki durumda da bu, farenin etkili bir kaçınma stratejisi geliştirmesini engelleyecektir. Kötü izleme, "Kalibratörden" sekmesindeki eşik ayarlanarak çözülebilir. Kötü izleme genellikle 10 dakikalık bir süre boyunca 1000'den fazla kötü kare olarak tanımlanır ve çok nadiren meydana gelir. Kötü izleme, alopesinin gelişebileceği yaşlı farelerde bir sorun haline gelebilir. Bir şok aldığında, fare ya gerilerek ya da bazen ses çıkararak tepki verecektir. Fare tipik olarak hafifçe de olsa hareket eder ve canlı izleme yazılımında görülebilir. Fare şok bölgesi içinde mükemmel bir şekilde hareketsiz kaldığında, net bir şok çizgisi gösterilecektir (Şekil 5B). Bunun nedeni, şok kutusunun açılmaması veya çubuklar arasına sıkışmış olması ve hayvana verilen şokun genliğini azaltması olabilir.

Şekil 1: APA cihazı, davranış odası ve şok bölgesi ayarı. (A) Test alanı ve oda kurulumuna bir örnek. APA aparatı yükseltilir ve yeni görsel ipuçlarıyla çevrili odanın ortasına yerleştirilir. Siyah beyaz görsel ipuçları, platformla aynı yükseklikte kullanılır. (B). Deney sekmesindeki Hedef işlevi, tüm arenanın maskelenmesine izin verir ve şok bölgesinin bir konumunu oluşturur. Bu örnekte 270°'de kırmızı kama ile temsil edilen bir şok bölgesi oluşturulmuştur. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 2: Albino fare suşları için APA kurulumu. APA arenası, İzleme sekmesindeki Işık seçeneğini seçerek ve siyah bir arena arka planı oluşturarak BALB/c gibi farelerin albino türleri için ayarlanabilir. Siyah arka plan üzerindeki bir albino fare, yüksek kontrast sağlar ve daha iyi fare takibi sunar. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 3: Fare izleme eşiğini ayarlamak çok önemlidir. Deneme sırasında iyi bir hayvan takibi sağlamak için eşik uygun şekilde ayarlanmalıdır. Eşik, Kalibratörden sekmesindeki eşik bölmesindeki kırmızı çizgi hareket ettirilerek ayarlanır. (A) Nesne üzerinde düz turuncu bir bölge ve mavi bir X bulunan iyi bir eşik seçimi örneği. (B) Benekli turuncu ile zayıf bir eşik. Kötü izleme, arenada bir hayvanın kaybına yol açar veya farenin şok bölgesindeyken şok almasını engeller. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 4: Genç (10 hafta) ve daha yaşlı (18 ay) fareler arasındaki performansın 5 günlük öğrenme paradigması ve İzleme haritalarında karşılaştırılması. (A) 10 haftalık fareler, 5 günlük test sırasında 18 aylık farelere kıyasla önemli ölçüde daha az şok aldı; Alınan şok sayısındaki farkın, gruplar arasındaki testin ilk gününde çok az olduğunu, ancak sağlam hafızaya sahip genç farelerin, şok bölgesine girmekten yaşlı gruba göre daha hızlı bir şekilde kaçınmayı öğrendiğini unutmayın. (B) Maksimum kaçınma, 10 dakikalık deneme sırasında şoktan kaçınmak için harcanan maksimum süre olarak hesaplanmıştır. Genç fareler, yaşlı farelere kıyasla şok bölgesine girmekten kaçınmayı hızla öğrendiler, bu da genç farelerin etkili bir şekilde öğrendiğini gösteriyor. (C) Bu izleme haritasındaki fare, bu edinme denemesindeki iki daire tarafından temsil edildiği gibi, yalnızca iki şok aldı. Bu fare aynı zamanda kırmızı kama ile temsil edilen şok bölgesinin karşısındaki arenada daha fazla zaman geçirdi. (D) Bu fare daha fazla şok aldı ve şok bölgesine yakın daha fazla zaman geçirdi, bu da bu farede uzamsal öğrenmenin başarılamadığını düşündürdü. Anlamlılığı test etmek için iki yönlü, tekrarlı ölçüm ANOVA ve Bonferroni post hoc testleri kullanıldı. sayfa <0.0001. Paneller A ve B, Blackmore ve ark.7'den modifiye edilmiştir. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 5: İzleme haritaları, her deneme sırasında her fare için önemli bilgiler sağlar. (A) Bu izleme örneğinde bulunan düz çizgilere dikkat edin. Bunun nedeni, izleme yazılımının görev sırasında bir fareyi yanlış tanımlamasıdır. (B) Deneme sırasında iyi bir izleme örneği. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

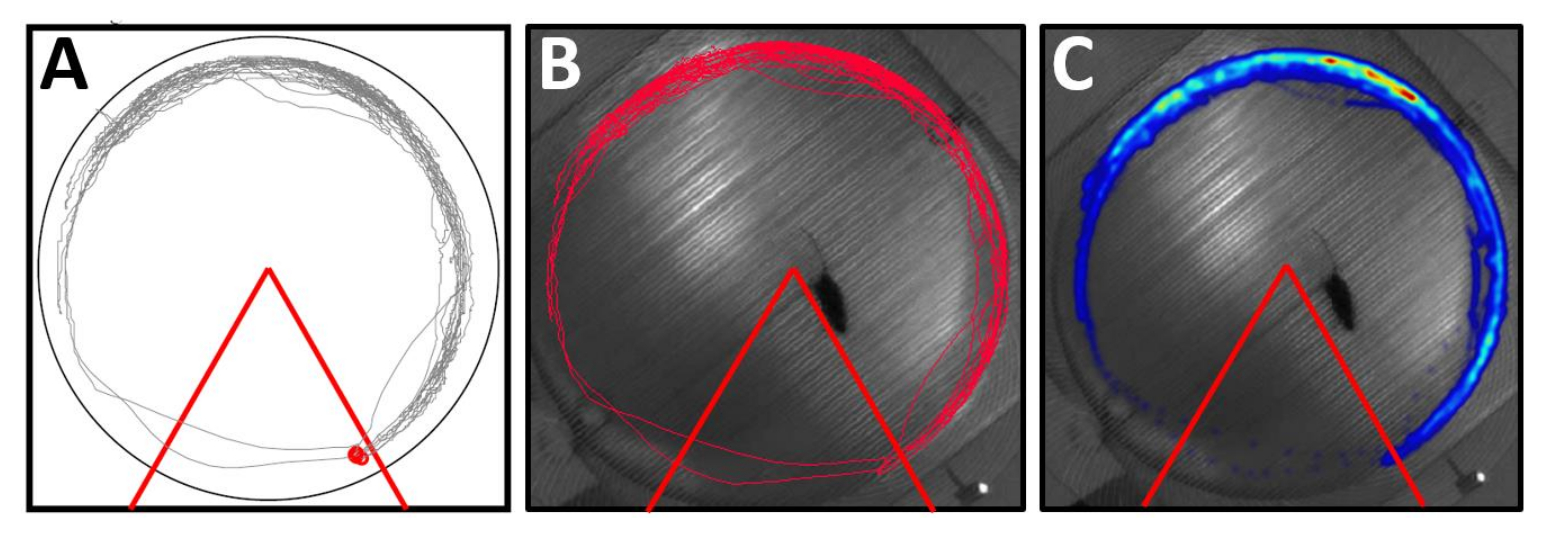
Şekil 6: Farklı hayvan izleme programlarında görselleştirme ve ısı haritasını izleyin. Hem (A) Program 1 hem de (B) Program 2, hayvanın deneysel tedavinin görevini veya etkisini öğrenip öğrenmediğini görsel olarak incelemek için iz grafikleri oluşturmak için hayvanın konumunu ve hareketini tespit eder. Her iki program da görevi verimli bir şekilde öğrenen bir hayvandan aynı parça grafiklerini gösterir. (C) Sıcak noktaların tanımlanmasını ve veri noktalarının kümelenmesini kolaylaştıran bir ısı haritası da oluşturulabilir. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
Tartışmalar
Sonuç olarak, aktif yerden kaçınma testi, çeşitli fare türlerinde ve deneysel koşullarda kullanılabilen etkili bir uzamsal öğrenme görevidir. APA görevi, kortizol seviyeleri14 ile ölçüldüğü gibi fareler için stresli olan MWM gibi diğer uzamsal öğrenme paradigmaları9 ile ilişkili sınırlamaların üstesinden gelir. MWM, görev10 sırasında yüzdükleri bildirilen yaşlı fareler için de uygun değildir. Barnes labirenti ve yeni nesne konum testi gibi diğer uzamsal öğrenme testleri daha az stresli olsa da, aynı fare kohortunda tekrar testinin ne sıklıkta yapılabileceği ile sınırlıdır. Bu nedenle, APA görevinin ana avantajı, yeniliği korumak için çeşitli parametreler ayarlanabildiğinden, birden çok kez kullanılabilmesidir. Gerçekten de, hipokampal ablasyonun etkisini ve egzersiz8'in müteakip etkisini incelemek için aynı fare kohortunda APA görevini 5 defaya kadar kullandık. Her durumda, arena dönüşü, şok bölgesi ve uzamsal ipuçları dahil olmak üzere parametreler testler arasında değiştirildi. Bu, farelerin, kontrol hayvanları tarafından kanıtlandığı gibi, görevi yeniden öğrenmek için uzamsal navigasyon ipuçlarını kullanmalarını sağlamada etkili oldu, yüksek sayıda şokla başladı ve daha sonra her test periyodu için sonraki test günlerinde azaldı8. Tipik olarak, 5 günlük bir test paradigmasının sonunda, son gün 10'dan fazla şok alan veya maksimum kaçınma süresi 60 saniyeden az olan herhangi bir hayvanın paradigmayı öğrenmediğini düşünüyoruz.
APA görevi, birden fazla uzamsal test turuna izin vermek için ayarları kolayca değiştirme yeteneğinin ötesinde, farelerin şok bölgesinden etkili bir şekilde kaçınmak için uzamsal navigasyonu kullanmasını sağlar. Örneğin, hayvanlar, sabit şok bölgesinden uzaklaşarak onu bulmak ve ona girmekten kaçınmak için dış ipuçlarını kullanmalıdır5. Arena dönerken, hayvanlar navigasyon için aptalca bir yaklaşım kullanamazlar ve koku gibi dışsal ipuçlarını kullanamazlar çünkü bu ipuçları arena ile birlikte dönerken şok bölgesi ve uzamsal ipuçları sabit kalır5.
Farelerin araştırmacı ve APA arenasına uygun şekilde alışmasını sağlamak da önemlidir. Ayak şokunun yoğunluğunun da optimize edilmesi gerekir, çünkü hem çok düşük hem de çok yüksek şok yoğunluğu farelerin görevi öğrenme ve gerçekleştirme yeteneğini tehlikeye atabilir5. Şok yoğunluğu tipik olarak 0,5 mA'ya ayarlanır ve 0,7 mA'yı geçmemelidir. Anksiyete benzeri davranışı artan hayvanlar için, hem ışık yoğunluğunu hem de ayak şoku yoğunluğunu azaltmayı düşünün. APA görevi sırasında artan kaygı, aşırı zıplama, arenada kontrolsüz koşma veya uzun süreli donma olarak ortaya çıkabilir. Burada tarif edilen protokol, daha önce BALB / c ile kullanılan ve daha yüksek kaygı benzeri davranışa sahip olduğu bilinen aynı yoğunluk olan 0.5 mA'lık bir şok yoğunluğu kullanmıştır15.
Burada, kullanılan aktif yerden kaçınma teçhizatını sağlayan şirket tarafından sağlanan hayvan izleme yazılımını açıklıyoruz. Alternatif video izleme yazılımı da davranışsal performansı analiz etmek için uygundur. Bu programlar ayrıca APA görevleri sırasında fare performansını doğru bir şekilde ölçebilir ve analiz edebilir. Bu programlar, davranışı değerlendirmek için APA arenası içinde çeşitli bölgelerin ve konumların oluşturulmasına izin verir. Bir APA için arena ayarı, giriş sayısının, ilk giriş süresinin ve şok bölgesinde geçirilen sürenin ölçüldüğü üçgen bir şok bölgesinden oluşur. Arena içinde ek bölgeler de eklenebilir. Örneğin, harcanan zamanı ölçmek için merkezi bir bölge veya şok bölgesinin karşısına bir bölge ekleyebilir ve bu bölgelerde caydırıcı bölgeden kaçınmak için bir hayvan stratejisi olarak kat edilen mesafeyi ekleyebiliriz. Bu programlar, fare kütle merkezini izler, bu daha sonra kaydedilir ve görsel inceleme için referans çerçevesinin üzerinde görüntülenir (Şekil 6A,B). Son olarak, bireysel ve grup performansı için bir yoğunluk ısı haritası oluşturmak da mümkündür (Şekil 6C).
APA görevini yürütürken, ele alınması gereken potansiyel sorunlar vardır. Bazen, şok bölgesine yanıt vermeme nedeniyle farelerin analizden çıkarılması gerekecektir. Her zaman olduğu gibi, dışlama yalnızca önceden tanımlanmış aykırı değer koşullarını karşıladıklarında, örneğin ortalamadan 2 standart sapmanın dışında kaldıklarında dikkate alınmalıdır. APA gibi karmaşık davranışsal görevler tipik olarak hayvanların yüksek N değerlerini gerektirir. APA'yı gerçekleştirmeden önce uygun örneklem boyutunu hesaplamak için bir güç analizi yapmanızı öneririz. Bu, kullanılan suşa ve tedavi gruplarına bağlı olacaktır. Deneyimlerimizden, APA deneyleri yaparken her grup için 10 veya daha fazla n değerinin yeterli güç sağladığını bulduk. Bu görevle ilgili temel sorun, görev sırasında farenin yüksek kalitede izlenmesini sağlamaktır. Görevin alışma aşaması, bunun gerçekleştiğini doğrulamak için kullanılmalıdır. Bir şoka tepki vermeyen fareler genellikle ızgara çubukları arasındaki scat'ten kaynaklanır. Bu nedenle, her hayvandan sonra teçhizatı temizlemek ve herhangi bir dışkı veya idrarı çıkarmak çok önemlidir. Bu aynı zamanda takip eden hayvanlar için stresi de azaltacaktır. APA görevi tipik olarak 5 günlük bir paradigmayı içerir ve bu, 5 günden daha az etkili müdahaleleri içeren çalışmalar için bazı sınırlamalar sunabilir; Bununla birlikte, kısa süreli hafıza veya uzamsal öğrenme edinimi, 30 dakikalık, tek oturumluk yaklaşım kullanılarak bu tür çalışmalar için hala değerlendirilebilir.
Özetle, bu makale, farelerin uzamsal öğrenmesini test etmek için aktif yerden kaçınma paradigmasının nasıl kurulacağı ve kullanılacağı hakkında ayrıntılı bir açıklama sağlar. Farklı renkteki birden fazla fare türünün test edilebilmesi için koşulları değiştirme yeteneği, MWM gibi diğer, daha geleneksel uzamsal testlere göre belirgin bir avantajdır. Ayrıca, çoklu parametrelerin modifikasyonu, mekansal öğrenmedeki değişikliklerin çeşitli deneysel paradigmalar sırasında veya fizyolojik yaşlanma sırasında doğru bir şekilde karşılaştırılabilmesi için tekrar teste izin verir. Kısa bir süre içinde, APA testinin hipokampusa bağlı uzamsal öğrenme için doğru ve etkili bir alternatif olduğu gösterilmiştir. Gelecekte, APA görevi, hem vahşi tip hem de transgenik farelerde bilişsel ve mekansal davranış üzerindeki terapötik veya egzersiz müdahalelerini değerlendirmek için güvenilir bir yöntem olarak kullanılabilir.
Açıklamalar
Yazarların ifşa edecek hiçbir şeyi yok.
Teşekkürler
Queensland Beyin Enstitüsü (QBI) Hayvan Davranışı Tesisi'ne bu yazıda açıklanan cihazın geliştirilmesi ve bakımı için teşekkür ederiz.
Malzemeler
| Name | Company | Catalog Number | Comments |
| Constant Current Source CS02 | BioSignal Group | N/A | Acton, Massachusetts, United States |
| Control Box | BioSignal Group | N/A | Acton, Massachusetts, United States |
| Ethovision | Noldus | version 16 | Wageningen, Netherlands |
| Shock Scrambler | BioSignal Group | N/A | Acton, Massachusetts, United States |
| Track Analysis | BioSignal Group | version 2.2 | Acton, Massachusetts, United States |
| Tracker Programme | BioSignal Group | version: 2.36 | Acton, Massachusetts, United States |
Referanslar
- Cimadevilla, J. M., Fenton, A. A., Bures, J. Functional inactivation of dorsal hippocampus impairs active place avoidance in rats. Neurosci Lett. 285 (1), 53-56 (2000).
- Willis, E. F., Bartlett, P. F., Vukovic, J. Protocol for short- and longer-term spatial learning and memory in mice. Front Behav Neurosci. 11, 197 (2017).
- Blackmore, D. G., Brici, D., Walker, T. L. Protocol for three alternative paradigms to test spatial learning and memory in mice. STAR Protoc. 3 (3), 101500 (2022).
- Pastalkova, E., et al. Storage of spatial information by the maintenance mechanism of LTP. Science. 313 (5790), 1141-1144 (2006).
- Stuchlik, A., et al. Place avoidance tasks as tools in the behavioral neuroscience of learning and memory. Physiol Res. 62 (Suppl 1), S1-S19 (2013).
- Vukovic, J., et al. Immature doublecortin-positive hippocampal neurons are important for learning but not for remembering. J Neurosci. 33 (15), 6603-6613 (2013).
- Blackmore, D. G., et al. An exercise "sweet spot" reverses cognitive deficits of aging by growth-hormone-induced neurogenesis. iScience. 24 (11), 103275 (2021).
- Codd, L. N., Blackmore, D. G., Vukovic, J., Bartlett, P. F. Exercise reverses learning deficits induced by hippocampal injury by promoting neurogenesis. Sci Rep. 10 (1), 19269 (2020).
- Harrison, F. E., Hosseini, A. H., McDonald, M. P. Endogenous anxiety and stress responses in water maze and Barnes maze spatial memory tasks. Behav Brain Res. 198 (1), 247-251 (2009).
- van Praag, H., Shubert, T., Zhao, C., Gage, F. H. Exercise enhances learning and hippocampal neurogenesis in aged mice. J Neurosci. 25 (38), 8680-8685 (2005).
- Zhou, X. A., et al. Neurogenic-dependent changes in hippocampal circuitry underlie the procognitive effect of exercise in aging mice. iScience. 24 (12), 103450 (2021).
- Leinenga, G., Gotz, J. Scanning ultrasound removes amyloid-β and restores memory in an Alzheimer's disease mouse model. Sci Transl Med. 7 (278), 278ra33 (2015).
- Willis, E. F., et al. Repopulating microglia promote brain repair in an IL-6-dependent manner. Cell. 180 (5), 833-846 (2020).
- Lesburgueres, E., Sparks, F. T., O'Reilly, K. C., Fenton, A. A. Active place avoidance is no more stressful than unreinforced exploration of a familiar environment. Hippocampus. 26 (12), 1481-1485 (2016).
- Crawley, J. N. Behavioral phenotyping strategies for mutant mice. Neuron. 57 (6), 809-818 (2008).
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiDaha Fazla Makale Keşfet
This article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır