
需要订阅 JoVE 才能查看此. 登录或开始免费试用。
Method Article
坐姿到站姿和步行距离120%膝盖高度:新方法来评估铅肢体的动态姿势控制独立
摘要
Here, we present a novel protocol to measure positional stability at key events during the sit-to-stand-to-walk using the center-of-pressure to the whole-body-center-of-mass distance. This was derived from the force platform and three-dimensional motion-capture technology. The paradigm is reliable and can be utilized for the assessment of neurologically compromised individuals.
摘要
与感觉病理学如个人,行程必须在执行从坐到并开始步态(坐姿到步行:STW)上涨的共同任务难度。因此,在临床康复分离坐姿到站姿和步态开始 - 称为坐姿到站姿和步行(STSW) - 是平常。然而,适用于病理性评估一个明确的分析方法的标准化STSW协议还有待确定。
因此,一个目标为导向的协议定义是适合健康受损的个体通过要求上升阶段是从120%的膝盖高度发起了支持独立铅肢体的广泛基础。力的三维(3D)的光学捕获节段性移动轨蹄,和平台,以产生二维(2D)中心的压力(COP)轨迹COP和全身中心-OF-之间的水平距离的许可证跟踪质量(BCOM),减少其中的增加S在稳定性,但建议将代表穷人的动态姿势控制。
BCOM-COP距离表示有和没有正常化受试者的腿的长度。虽然COP-BCOM距离通过STSW各不相同,在座位起飞和初始脚尖离地(TO1)的主要运动事件中的步骤1和2规范化数据有由10位年轻的健康人进行5次重复试验低内和跨学科的变异。因此,患者上运动神经元损伤,或其他损害的患者群体,和规范数据在年轻健康个体之间的STSW范例的执行期间比较在键事件COP-BCOM距离为动态姿势稳定性的评价一种新颖的方法。
引言
影响感觉系统的临床病症,例如上运动神经元(UMN)损伤后中风,导致功能障碍包括虚弱,姿势的稳定性和痉挛的损失,这可以运动产生负面影响。恢复可与中风幸存者未能实现安全站立或行走1,2的功能里程碑的显著数量变量。
行走的离散实践和坐姿到站姿是UMN病理3,4后常见的康复任务,但是过渡动作经常被忽略。坐姿到步行(STW)是集坐姿到站姿(STS),步态启动(GI),和步行5连续的姿势,运动任务。
STW过程中反射犹豫的STS和GI,分离已经在患者中观察到与帕金森氏症6和慢性中风7中,除了较旧unimpaireð成年人8,但不是在年轻健康个体9。因此坐姿到待机和步行(STSW)被临床环境中通常实现的,并通过可变长度的暂停相站立时限定。然而,没有发表协议日期限定适于患者群体的上下文STSW动力学。
通常在STW研究最初的椅子高度为膝盖高度的100%(KH;地板到膝盖的距离),脚宽和GI铅肢是自我选择,双臂交叉于胸前和生态意义的任务语境的制约往往是缺席5-9。然而,患者发现从100%KH 10具有挑战性的上升和频繁采取更广泛的脚的位置与健康人相比,11,发起步态与患肢7,用自己的武器来产生动力7。
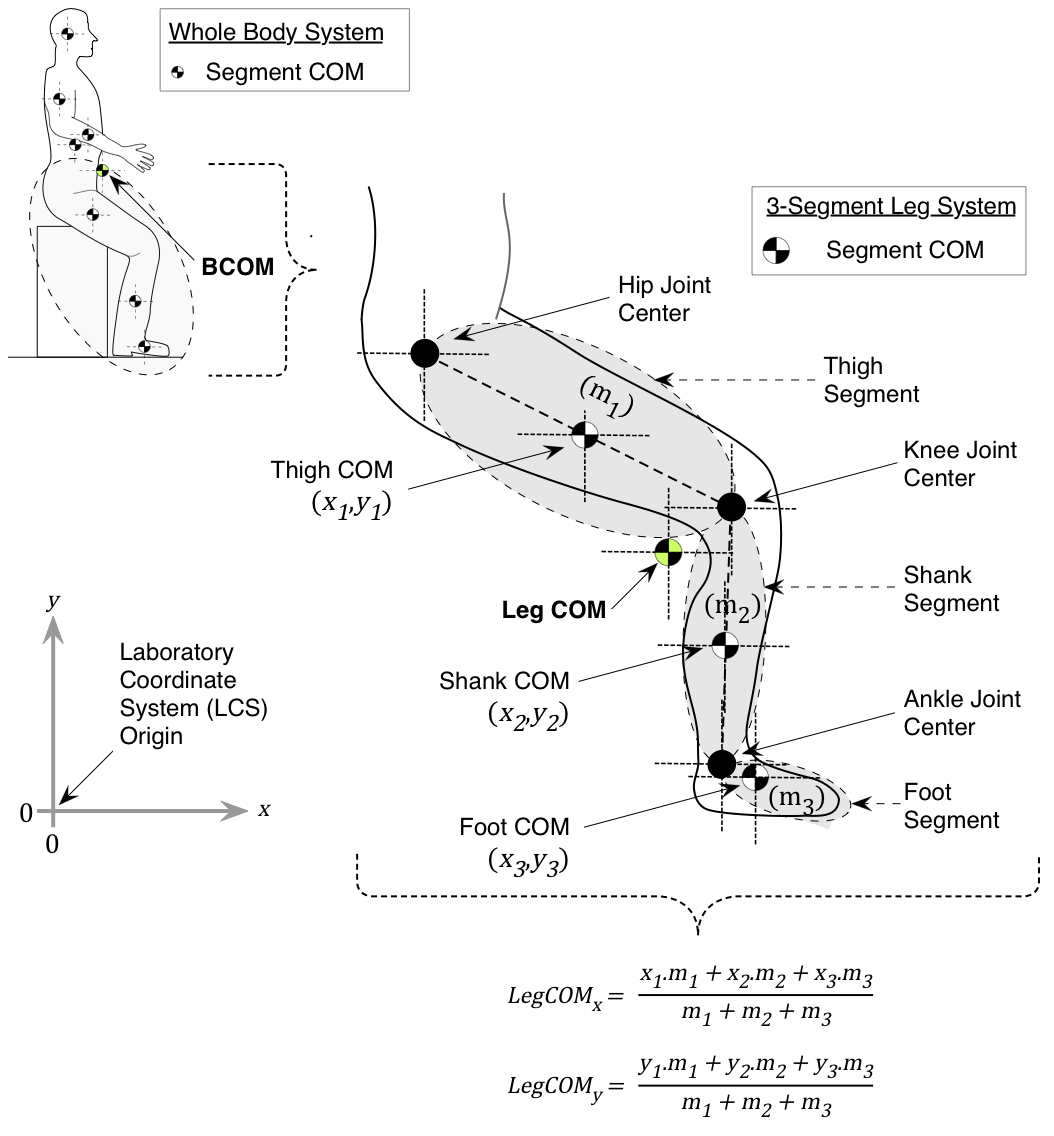
要启动的步态,在全身运动状态变化在purpos eful方向需要12。这是通过解偶联全身中心的质量来实现的:从中心的压力的(COP(BCOM在空间13都被认为是身体段的加权平均):将得到的地面反作用力的位置(GRF)载体14)。在胃肠道,快速定型后,向肢体的COP的横向运动的预期相位对摆动发生从而产生BCOM动量12,15。由此缔约方会议和BCOM是分开的,在它们之间的水平距离已被提议作为动态姿势控制16的量度。
COP-BCOM距离的计算需要缔约方会议和BCOM位置同时测量。 COP的标准计算如下所示公式(1)17:

tp_upload / 54323 / 54323eq2.jpg"/>

(1)
其中M和部队代表分别约为力平台轴和定向GRF时刻。下标表示轴。原点是所述接触表面和所述力平台的原点之间的垂直距离,并且被认为是零。
推导BCOM位置的运动方法包括跟踪标记段的位移。身体分割运动的忠实代表可以通过使用群集从骨性标志置于远离刚性板标志,尽量减少软组织神器(CAST工艺18)来实现。为了确定BCOM位置,从个人身体段群众估计的基础上,尸体的工作19。三维(3D)运动系统的专有软件采用坐标近端和d的位置istal段的位置,以便:1)确定节段性长度,2)算术估计节段性群众,和3)计算节段性COM位置。这些模型然后能够根据节段间位置的净求和( 图1)在时间上在给定的点提供的3D BCOM位置估计。
因此,本文的目的是首先提出一个标准化STSW协议,该协议是有效的生态,包括从高座高度上升。先前已表明,STSW从120%的KH为100%的KH限制代低级BCOM垂直速度和GRF的的生物力学恍上升20,这意味着从120%提高KH为受损的个体容易(和更安全的)中。其次,要得到COP-BCOM的水平距离,以评估期间使用3D动作捕捉关键里程碑和过渡的动态姿势控制。这种做法,这在STSW在健康人是独立的肢体乐的广告20,提供功能恢复评价的前景。最后,初步数据STSW代表年轻健康个体的集合呈现,并且组中的内和跨学科的变化是为了与病理个人通知比较确定。

图1. 2D BCOM计算。为了简单起见,这个例子是基于在2个维度,从3-联质量计算全腿的COM,其中各自的COM的位置(X,Y),和节段性质量(M 1的坐标, M 2,M 3)是已知的。段群众和节段性COM位置的位置,相对于所述实验室坐标系(LCS;产地:0,0),通过使用受试者体重和公布人体测量数据的运动分析系统的专用软件估计(见正文)。在x一第二ÿ腿COM位置,在3连质这个例子中,然后使用显示的公式的。 请点击此处查看该图的放大版本。
{kind=link}
研究方案
该协议遵循人类参与者的测试,由伦敦南岸大学研究伦理委员会的批准(UREC1413 / 2014)规定的地方准则。
1.步态实验室制
- 显然,可能被误解为标志的运动,消除环境日光以降低反射适当不必要的反射物体的捕获量。
- 打开运动捕获相机,专有跟踪软件,力平台放大器和外部模拟 - 数字(AD)转换器。等待一段时间以相机进行初始化。
- 安排相机确保有在捕获体积的极端至少2相交的轴。确保各个摄像机都通过检查单个点的高分辨率捕获体积空间内测试指标(如静态标定帧)的最佳曝光和光圈设置(见参考附录A 21)。
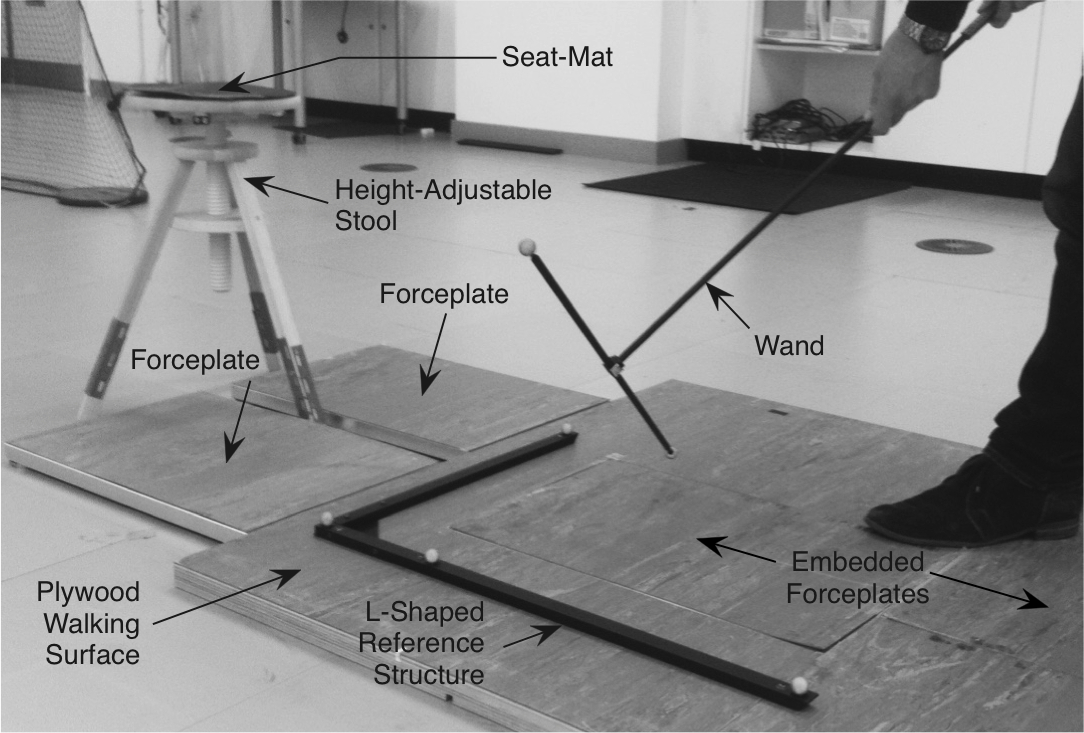
- 摩主题切换到拍摄对象的肚脐高度关掉视觉信号走在人行道的正中线6米的行进方向的起始位置的前方,在三脚架上。安装光源(视觉通行信号),在走道的中线,在主体的眼角高度在行进的方向标的开关,在三脚架上的前1米( 图2)。安排在靠近研究者操作电灯开关。
- 安排力平台1和步态萌生并行2和力平台以交错配置以捕获非主导引肢试验3和4。然后附加力平台,具有可移动的带遮盖住。

图2.实验协议 。这个例子显示了左小腿铅:主题在120%的膝盖高度坐在一个凳子仪表(KH)的机智^ h脚踝在离开导向推进与肩同宽背屈10°度和脚。在一个视觉提示,受试者执行与他们在通过切断光终止自选速度不占优势的肢体领先STSW的5次试验。 请点击此处查看该图的放大版本。
{kind=link}
- 在专有的跟踪软件设置捕捉频率为60 Hz和3D跟踪参数。具体而言,使用20毫米,2毫米,最小轨迹长度相当于2帧和10帧的最大帧间隙的最大残余预测误差。去从每个表单平台放大器每个8个体力平台组件(Z1,Z2,Z3,Z4,X1-2。x3-4,y1-4,y2-3),以确定到各模拟 - 数字转换器(在这项研究中32个信道)。
- 确保从每个动力平台的calibratio所有预先确定的校准设置ñ文档,缩放因子和模拟频道已经被指定(见项目选项;模拟板21),并提名偏移卸载时要捕捉的最后10帧时读取。
- 在专有的追踪软件,提名事半功倍的动作捕捉频率,以确保有足够的模拟采样频率。使用了17倍增,产生1020赫兹的个人力量的平台采样频率。
- 实施动态棒校准过程:
- 关于在三维空间中的校准制备的捕获体积地板L形的基准结构的位置。这种结构的长轴应于前的方向指向。 (见魔杖校准方法21)。
- 在项目选项对话框校准设置页面,选择法杖校准'类型',用750毫米的长度。然后选择COOR与正z轴指向上方和正Y轴作为长臂dinate系统定向(见校准21)。点击OK。
- 点击校准图标和校准捕获的预期长度为60秒。然后设置5秒的时间延迟并确定将结果保存的文件目录。点击OK开始校准。
注意:棒过程使用两个标定物体来校准测量容积;这是用来最大化的大动作捕捉容积( 图3)的分辨率。一个是一个固定的L形的基准结构与连接到它四种标记,并用于定义全局坐标系。另一目的是一个棒,它由位于彼此固定的距离的两个标记。在校准期间,X,Y,的这些ž取向相对于跟踪到的x,y,四个静态标记的z轴位置上的参考结构;反过来允许专有软件进行三角,预测和重构在三维空间中移动标记的轨迹。在此过程结束时,每个摄像机返回其准确性的残留误差。 - 通过旋转和平移围绕预期捕获量为指定的60秒魔杖移动校准体积内校准棒(见魔杖校准方法21)。
- 检查校准结果 ,接受的<1.5毫米个别相机残留误差校准,然后单击确定 。
注意:如果你有测力板会有提醒您再次测力板位置的警告(因为它最有可能与新的校准改变)。

图相机3. L型参照结构和魔杖校准。L形的基准结构保持静止,并具有4个标记附加到它。魔杖有固定距离附加两项标记和移动,相对于参考结构,打造这对设定的预期标记足够足够空间的3-D校准体积通过。 请点击这里查看该图的放大版本。
{kind=link}
- 删除校准从捕捉卷集。通过将一个9mm直径被动的反光标志各4个角落的每个平台的定位校准三维空间中的力平台(注意布局是至关重要的;见力板位置21)。获得5秒记录并继续到三维空间内确定每个标记和各平台的参考系统(PRS),为每专有软件的建议。
- 承接动态拍摄使用上述采样和3D跟踪参数(1.6),以确认和感官检查后续力大小和方向。
- 设置动态捕捉15秒,5秒的延迟。一旦开始拍摄点击启动,运营商有时间坐在凳子上,暂停,站立,暂停和往前行走使同力平台(在这一点上的接触,也没有必要为操作者具有逆反射附着在原位标记)。
- 一旦捕获完成后,检查方向和地面反作用力向量的幅度,确保力的平台配置是否正确。期望向上和在脚接触后路于行进向量的方向,和大约1至1.5倍体重的最大垂直力。
- 在力平台1和2( 图2)之间的捕获量的中线处高度可调粪便,然后连接300mm的diame之三压座椅垫到外部AD转换器。
- 通过预先单独地附着到双面胶带的一侧准备固定所有被动定向反光解剖标记,大约15毫米长(至少60厘米的每个受试者总双面胶带的),并在适当的位置准备应用安排为主题。包括跟踪标记集群和自我保护绷带准备适时主题的应用程序。
注:跟踪标记应包括至少设置在非共线的排列3向后反射标记,并放置在主体段(定位在估计关节中心一些解剖标记可以被用作跟踪标记例如 1 次和第第五跖骨)。
2.除准备
- 获得从受试者签署知情同意书谁符合包含/排除标准。
- 请随时更改到合适的衣服(单车小号horts,紧密贴合的T恤和运动胸罩如适用)。
- 用蹬一球试验22受试者是否能够安全地做到这一点,建立主导下肢。
- 受测站在高处(m)和质量(kg);转换质量为重量(N)。
- 随着主体地位,用测量卡尺测量受双肩峰的距离(米)。锁定卡尺位置时,使用距离为尺定位(见下文4.5)。
- 测量的主要肢体(站立)垂直落地的膝盖距离(米);乘以距离1.2来计算的120%的KH距离(米)。大便调整高度,以120%的KH。 表1总结了 10个健康学科特点包括膝盖高度数据。

表1:学科特色个人数据和平均(±1 SD)在10个科目中。
- 准备标记放置的皮肤区域。剃不必要体毛酌情并用酒精擦拭以去除过量的汗和/或保湿最大化标记和皮肤之间的粘附性。
- 触诊,确定并应用逆反射标记按照参照图23( 表2)所选择的技术帧使用双面胶带的下限和上肢,躯干,头部的解剖标志和骨盆区段。继续与自我保护绷带适用节段性跟踪标记。
注意:在女性中,如果产生困难定位胸骨切迹标记 - 位置标记在运动胸罩服装的中心。

表2:标记设置的位置 。标记(解剖和跟踪)的基础上参考23先前报道的技术框架。
- 请受走进捕获量并采用解剖位置。在这一点上的主体不能移动后静止捕获已由于在此解剖位置估计超过服装髋关节中心的固有的问题进行罚金。
3.静态拍摄
- 指示受静置在捕捉容积的中心,假定标准的解剖位置, 原位所有解剖和跟踪标记。
注意:为了减少软组织工件的静态校准原位解剖和跟踪标记进行。跟踪标记参照的解剖标记,该否定假定关节中心不皮肤下移动的限制。跟踪标记将留在原地进行后续动 态试验。这被称为校准解剖系统技术(CAST)18。- 为了承接短静态捕捉,使用上述采样和3D跟踪参数(1.6),并确保通过确认3D实时模式在身份不明的轨迹面板中列出的标记总数的所有标记都在捕获量占。这应该与标记的总数的基准所选择的技术帧需要对应。单击录制图标来完成一个5秒捕获。重复上述步骤,其中如果标记缺少必要的。
注:见下文第6节静态捕捉数据的处理。
- 为了承接短静态捕捉,使用上述采样和3D跟踪参数(1.6),并确保通过确认3D实时模式在身份不明的轨迹面板中列出的标记总数的所有标记都在捕获量占。这应该与标记的总数的基准所选择的技术帧需要对应。单击录制图标来完成一个5秒捕获。重复上述步骤,其中如果标记缺少必要的。
- 使用关于这个问题的主导方从髋关节中心的标志性建筑的位置数据来确定腿长度(从髋关节中心的距离(见下文7.1和表3b)到楼)的距离正常化(见下文7.11)。
4.熟悉
- 删除所有的解剖,只有标记。
- 指导主题坐与脚放在个人的力量平台1&2大便通畅。
- 受指导站,然后与定义的前腿向前走。调整大便的前后位置,直到这个问题一直让在第一两步步态与力平台3和4的中央接触。允许反复练习,直到审判的主题是舒适。
- 标志着以重新建立大便位置与地板表面带凳子的前腿位置。
- 设置最终脚位置( 图2)。受询问坐在凳子上,双脚个人力平台1和2.使用延伸臂测角器从垂直调节杆的位置上主体的优势侧10°后路。继续到同样调整非主导脚行,然后使用锁定卡钳(见上文2.5),安排英尺间宽度预先确定双向肩峰距离相应的横向尺边界之间。
- 调整每个脚的横向平面取向,使得每个中间脚边界被放置在线路与行进方向。
- 最后检查对齐后,用干板记号笔到可移动力台表面绘制全能决赛脚的位置。
- 使用口头指令:"当你看到光明在你面前来吧,站起来制止精神上3至1,一个号码在同一时间倒计时然后,用你的非惯用脚领先,走在舒适的步伐向着光前面的开关,停止从心理上3计数下降到1,一次一个号码,然后用你的写作手使用开关关灯"。
- 再次重申,以使他们自然地使用他们的武器的主题,然后让被摄体足够熟悉到STSW协议。熟悉给受试者尽可能多的时间尽可能使其恢复到测试环境确保它们能够有效地完成没有任何强迫动作可能对实验范式的生态效度,否则撞击任务。
5. STSW动态试验
- 随着主题坐在凳子上准备动态试验,首先确认在3D实时模式下, 身份不明的轨迹板上市标记的总数和它们对应带标记的总人数,职权选择的技术框架要求。然后,单击录制图标来完成一个15秒的动态拍摄。
- 5秒捕获后,打开运营商光开关,检查主体如何响应 - 他们从大便上升,暂停的指示,加强对强制平台3和4,他们停止和关闭照明灯的指示捕获周期内。
- 重新设置灯的开关和占审判慢动作回放过程中的所有标记检查标记辍学。如果重复necessaRY,否则继续下试。去捕捉5次试验STSW在每个主题。
- 在解剖标志的情况下成为独立的,重新安装到预定的皮肤标志。如果跟踪标记移动,重新连接的解剖标志和重复静态试验 - 然后继续剩余的动态试验。
6.专有跟踪软件后处理
- 在专有跟踪软件,识别和标记从静态和动态试验的所有标记(见轨迹21的章手动识别)和作物有害的捕获通过移动时间滑动到任务的开始和结束。利用"自动识别标志",也被称为AIM,功能的专有跟踪软件来辅助标记(见生成一个AIM模式21)。
注:需要标记的标签,这样的所有权和随后的生物力学分析软件一贯构造并算出刚体在3维空间中的相对轨迹。如表2所示使用有意义的标签, 目的是主题明确,而且不断更新。用不同的主题,在一个贫穷的AIM的情况下,继续由手工贴标更新AIM。这也适用于静态拍摄过程中(见上文第3.1.1节)。 - 在标记的情况下辍学,超过10帧,去到任何使用由专有软件提供的多项式插补功能找到丢失的轨迹在身份不明的轨迹板,或手动间隙填充 (见填充间隙轨迹21) 。
注意:在某些情况下,标记的轨迹是部分缺失和间隙填充是一个机制,丢失的数据可以在数学上估计基于所测量的轨道之前和丢失的数据之后。 - 格式ð导出所有静态和动态试验中,C3D格式,后处理生物力学分析软件。
注:在出口,排除所有身份不明,空标记轨迹,指定事实上的标签,并提名为每个测力板零力基线水平近10帧。
7.生物力学分析软件后处理
- 建立静态13段模型23(脚,小腿,大腿,骨盆,躯干,上臂,前臂和头(注意没有手))。
注 :建立模型的方法是定义基于静态测量试验和专有软件指令被链接的段基本被用于24在这个协议中的解剖坐标为每个本体段( 表3a)和接头中心位置的系统( 表3b )主要是根据仁等 23改编,以避免功能ħIP和盂肱关节中心的估计。所有接头中心位置黄金标准保持成像技术,如磁共振成像(MRI),这是在大多数情况下是不现实的。功能联合中心估计已利用;然而,仍然存在,患者的病理将无法移动关节中必要的平面25上的风险。因此,为对骨盆回归方程如戴维斯26经常被使用。这里,CODA骨盆27被使用,并且是由Bell 等人 。28基于工作,并估计盂肱关节中心根据埃姆斯等人 29。

表3a: 解剖坐标系统的全身模型。

表3b:为全身型联合中心的定义。
- 导入动态文件和模型分配给每个。通过检查段正常的视觉配置确认建模精度。在不准确的情况下,操作建议回去专有跟踪软件文件和检查传感器图像跟踪配置文件,并根据需要纠正。
- 低通滤波器的运动,并以4 阶巴特沃斯与截止频率为6赫兹和25赫兹分别过滤动力学数据。
- 在25帧窗口平均滤波光和压力垫模拟信号。
- 对于力平台1,2,3创建兵力结构,和4,使用角落坐标以创建一个浮出水面级,矩形结构,包括所有4力平台( 图4)。
注:受力结构,需要30以净COP计算可以在整个4力的平台进行。 我> - 计算净COP坐标在实验室内的信号(x和y)坐标从力结构系统(LCS)。
注:该软件通过下面用公式2A-G执行此。- 使用X和Y信号由公式2F和2G的LCS内净COP位置。
(2A)网内 - 外力
(2B)净前后力
(2C)净垂直力
(2D).net平台一刻约x轴
(2E).net平台一刻绕Y轴ñ8"SRC ="/文件/ ftp_upload / 54323 / 54323eq8.jpg"/>
(2F)×净力作用点-协调(COP X) 
(2G)的净力作用点(COP Y)的ÿ -协调

图4.兵力结构,矩形的兵力结构包含4力平台在右铅肢体方向的例子。本地COP应用细节和尺寸相对于实验室坐标系(LCS)示为力平台1为例。将x,y,该平台参考系统(PRS)的z轴位置是相对于到L偏移 CS,其中X 1和Y 1分别代表从PRS的中侧和前后距离,。来计算关于x轴的单独的平台的时刻中,垂直GRF由局部Y COP的总和乘以坐标和新的PRS-LCS偏移y坐标(Y 1 + Y 1)。 (X 1 + X 1) -关于y轴坐标的时刻同样由局部x COP的负和协调,新的PRS-LCS偏差x坐标垂直GRF乘以。关于全球力量结构力的总力矩等于所有力的时刻的总和,由各个垂直力的总和。净COP X和Y坐标被如此产生的LCS内的力的结构(方程式2a至克)。large.jpg"目标="_空白">点击此处查看该图的放大版本。
- 使用自定义管道命令,在STSW创造重要的移动事件,特别是坐客,抬头挺胸,步履开始发病,先脚尖离地1和1 和第 2 次初步接触( 表4)。

表4:运动事件定义 GI -步态启动; COP - 中心的压力; 110 1 - 脚跟先关闭; TO1 - 第一脚尖离地,IC1 - 第一初步接触。
- 使用定制的管道命令通过在每一运动事件,其中t i表示一个给定事件施加方程3计算COP-BCOM距离(L)。

(3) - 使用自定义管道命令,由两个事件之间施加公式4计算最大COP-BCOM距离(L 最大值 )(T O→T I)。

(4)
其中:T 0和T I代表运动发作和利息分别为最后的时间点,(X COP(T I))为X缔约方会议在时间t 我坐标(X BCOM(T I))是坐标在时刻t的BCOM i的,和(y COP(T I))和(y BCOM(T I))是用于在y的相应值的坐标31。 - 提取在运动事件的兴趣因变量;在座位客和f COP-BCOM的距离开始步骤脚趾离(TO1)的事件,并在(间TO1和第一初始接触; IC1)的1步相位最大COP-BCOM距离和第二步骤相(IC1和IC2之间)使用定制管道命令。
- 规范化检体内COP-BCOM的距离为主体的主导腿长的比例(见上文3.2)。
- 使用复制到剪贴板功能,统计分析,或者在其他可用的本地格式导出文件导出数据。
8.特定实验室规范价值计算
- 计算双方实际COP-BCOM距离和标准化值作为实验对象"显性下肢长度的比例平均(±1 SD)内和跨学科的值。
- 计算变化(COV)均值跨学科的数据系数。
- 计算每个使用双向混合效应模型内的类相关系数事件检体内的变化(ICC 3,1),以及测量误差32。
结果
所有受试者上涨用脚置于双动力平台,用自己的非主导肢体领导的指示。与在5次重复的目标为导向的STSW任务从120%上升KH干净科目踏上了其他平台和3D基于光学的运动分析成功跟踪全身运动观察步态正常。同时COP和BCOM中侧(ML)和前后(AP)的座断和IC2(100%STSW周期),包括之间的位移:上升,暂停,步态起始(GI),步骤1和步骤2在图5A中分别示和图5B
讨论
这里定义的坐姿到站姿和步行(STSW)协议可用于健康人或病人群体复杂的过渡运动期间测试动态姿势控制。该协议包括被设计为允许与病理的受试者参与的限制,并切断光纳入意味着它是生态上有效和目标定向。因为先前已经证明,铅肢和从高(120%KH)座上升STSW 20期间不从根本上影响任务动力学,此处描述的方法可以作为一个标准的协议被应用。这STSW协议具有有效性,因为相比于健康...
披露声明
The authors have no competing financial interests to disclose.
致谢
笔者想感谢托尼·克里斯托弗,林赛在马郁兰伦敦大学国王学院和比尔·安德森在伦敦南岸大学为他们的实际支持。也谢谢埃莉诺·琼斯在伦敦大学国王学院,她在收集数据,该项目的帮助。
材料
| Name | Company | Catalog Number | Comments |
| Motion Tracking Cameras | Qualysis (Qualysis AB Gothenburg, Sweden) | Oqus 300+ | n= 8 |
| Qualysis Track Manager (QTM) | Qualysis (Qualysis AB Gothenburg, Sweden) | QTM 2.9 Build No: 1697 | Proprietary tracking software |
| Force Platform Amplifier | Kistler Instruments, Hook, UK | 5233A | n= 4 |
| Force Platform | Kistler Instruments, Hook, UK | 9281E | n= 4 |
| AD Converter | Qualysis (Qualysis AB Gothenburg, Sweden) | 230599 | |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B01 | n= 2 |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B02 | n= 4 |
| 4 Point "L-Shaped" Calibration Frame | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| "T-Shaped" Wand | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| 12 mm Diameter Passive Retro reflective Marker | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160181 | Flat Base |
| Double Adhesive Tape | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160188 | For fixing markers to skin |
| Height-Adjustable Stool | Ikea, Sweden | Svenerik | Height 43 - 58 cm with ~ 10cm customized height extension option at each leg |
| Circular (Disc) Pressure Floor Pad | Arun Electronics Ltd, Sussex, UK | PM10 | 305 mm Diameter, 3 mm thickness, 2 wire |
| Lower Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160145 | 2 Marker clusters, lower body with 8 markers (n= 2) |
| Upper Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160146 | 2 Marker clusters, lower body with 6 markers (n= 2) |
| Self-Securing Bandage | Fabrifoam, PA, USA | 3'' x 5' | |
| Cycling Skull Cap | Dhb | Windslam | |
| Digital Column Scale | Seca | 763 Digital Medical Scale w/ Stadiometer | |
| Measuring Caliper | Grip-On | Grip Jumbo Aluminum Caliper - Model no. 59070 | 24 in. Jaw |
| Extendable Arm Goniometer | Lafayette Instrument | Model 01135 | Gollehon |
| Light Switch | Custom made | ||
| Visual3D Biomechanics Analysis Software | C-Motion Inc., Germantown, MD, USA | Version 4.87 |
参考文献
- Duncan, P. W., Goldstein, L. B., Matchar, D., Divine, G. W., Feussner, J. Measurement of motor recovery after stroke. Outcome assessment and sample size requirements. Stroke. 23 (8), 1084-1089 (1992).
- Smith, M. T., Baer, G. D. Achievement of simple mobility milestones after stroke. Arch Phys Med Rehabil. 80 (4), 442-447 (1999).
- Langhorne, P., Bernhardt, J., Kwakkel, G. Stroke rehabilitation. Lancet. 377 (9778), 1693-1702 (2011).
- Veerbeek, J. M., et al. What is the evidence for physical therapy poststroke? A systematic review and meta-analysis. PLoS One. 9 (2), e87987 (2014).
- Magnan, A., McFadyen, B., St-Vincent, G. Modification of the sit-to-stand task with the addition of gait initiation. Gait Posture. 4 (3), 232-241 (1996).
- Buckley, T. A., Pitsikoulis, C., Hass, C. J. Dynamic postural stability during sit-to-walk transitions in Parkinson disease patients. Mov Disord. 23 (9), 1274-1280 (2008).
- Frykberg, G. E., Aberg, A. C., Halvorsen, K., Borg, J., Hirschfeld, H. Temporal coordination of the sit-to-walk task in subjects with stroke and in controls. Arch Phys Med Rehabil. 90 (6), 1009-1017 (2009).
- Dehail, P., et al. Kinematic and electromyographic analysis of rising from a chair during a "Sit-to-Walk" task in elderly subjects: role of strength. Clin Biomech (Bristol, Avon). 22 (10), 1096-1103 (2007).
- Buckley, T., Pitsikoulis, C., Barthelemy, E., Hass, C. J. Age impairs sit-to-walk motor performance. J Biomech. 42 (14), 2318-2322 (2009).
- Roy, G., et al. The effect of foot position and chair height on the asymmetry of vertical forces during sit-to-stand and stand-to-sit tasks in individuals with hemiparesis. Clin Biomech (Bristol, Avon). 21 (6), 585-593 (2006).
- Kubinski, S. N., McQueen, C. A., Sittloh, K. A., Dean, J. C. Walking with wider steps increases stance phase gluteus medius activity. Gait Posture. 41 (1), 130-135 (2015).
- Jian, Y., Winter, D. A., Ishac, M. G., Gilchrist, L. Trajectory of the body COG and COP during initiation and termination of gait. Gait Posture. 1 (1), 9-22 (1993).
- Winter, D. A. Human balance and posture control during standing and walking. Gait Posture. 3 (4), 193-214 (1995).
- Cavanagh, P. R. A technique for averaging center of pressure paths from a force platform. J Biomech. 11 (10-12), 487-491 (1978).
- Halliday, S. E., Winter, D. A., Frank, J. S., Patla, A. E., Prince, F. The initiation of gait in young, elderly, and Parkinson's disease subjects. Gait Posture. 8 (1), 8-14 (1998).
- Hass, C. J., Waddell, D. E., Fleming, R. P., Juncos, J. L., Gregor, R. J. Gait initiation and dynamic balance control in Parkinson's disease. Arch Phys Med Rehabil. 86 (11), 2172-2176 (2005).
- Winter, D. A., Patla, A. E., Ishac, M., Gage, W. H. Motor mechanisms of balance during quiet standing. J Electromyogr Kinesiol. 13 (1), 49-56 (2003).
- Cappozzo, A., Catani, F., Croce, U. D., Leardini, A. Position and orientation in space of bones during movement: anatomical frame definition and determination. Clin Biomech (Bristol, Avon). 10 (4), 171-178 (1995).
- Dempster, W. T., Gabel, W. C., Felts, W. J. The anthropometry of the manual work space for the seated subject. Am J Phys Anthropol. 17 (4), 289-317 (1959).
- Jones, G. D., James, D. C., Thacker, M., Jones, E. J., Green, D. A. Sit-to-Walk and Sit-to-Stand-and-Walk Task Dynamics are Maintained During Rising at an Elevated Seat-Height Independent of Lead-Limb in Healthy Individuals. Gait Posture. 48, 226-229 (2016).
- Qualysis AB. . Qualysis Track Manager User Manual. , (2011).
- Hoffman, M., Schrader, J., Applegate, T., Koceja, D. Unilateral postural control of the functionally dominant and nondominant extremities of healthy subjects. J Athl Train. 33 (4), 319-322 (1998).
- Ren, L., Jones, R. K., Howard, D. Whole body inverse dynamics over a complete gait cycle based only on measured kinematics. J Biomech. 41 (12), 2750-2759 (2008).
- C-Motion Wiki Documentation. . Tutorial: Building a Model. , (2013).
- Kainz, H., Carty, C. P., Modenese, L., Boyd, R. N., Lloyd, D. G. Estimation of the hip joint centre in human motion analysis: a systematic review. Clin Biomech (Bristol, Avon). 30 (4), 319-329 (2015).
- Harrington, M. E., Zavatsky, A. B., Lawson, S. E., Yuan, Z., Theologis, T. N. Prediction of the hip joint centre in adults, children, and patients with cerebral palsy based on magnetic resonance imaging. J Biomech. 40 (3), 595-602 (2007).
- C-Motion Wiki Documentation. . Coda Pelvis. , (2015).
- Bell, A. L., Brand, R. A., Pedersen, D. R. Prediction of hip joint centre location from external landmarks. Human movement science. 8 (1), 3-16 (1989).
- Eames, M. H. A., Cosgrove, A., Baker, R. Comparing methods of estimating the total body centre of mass in three-dimensions in normal and pathological gaits. Human movement science. 18 (5), 637-646 (1999).
- C-Motion Wiki Documentation. . Force Structures. , (2015).
- Martin, M., et al. Gait initiation in community-dwelling adults with Parkinson disease: comparison with older and younger adults without the disease. Phys Ther. 82 (6), 566-577 (2002).
- Bland, J. M., Altman, D. G. Measurement error. BMJ. 313 (7059), (1996).
- Hof, A. L. Scaling gait data to body size. Gait Posture. 4 (3), 222-223 (1996).
- Holden, J. P., Selbie, W. S., Stanhope, S. J. A proposed test to support the clinical movement analysis laboratory accreditation process. Gait Posture. 17 (3), 205-213 (2003).
- Baker, R. Gait analysis methods in rehabilitation. J Neuroeng Rehabil. 3, (2006).
- Gregory, C. M., Embry, A., Perry, L., Bowden, M. G. Quantifying human movement across the continuum of care: From lab to clinic to community. J Neurosci Methods. 231, 18-21 (2014).
- Pai, Y. C., Rogers, M. W. Segmental contributions to total body momentum in sit-to-stand. Medicine and Science in Sports and Exercise. 23 (2), 225-230 (1991).
- Hughes, M. A., Weiner, D. K., Schenkman, M. L., Long, R. M., Studenski, S. A. Chair rise strategies in the elderly. Clin Biomech (Bristol, Avon). 9 (3), 187-192 (1994).
- Medeiros, D. L., Conceição, J. S., Graciosa, M. D., Koch, D. B., Santos, M. J., Ries, L. G. The influence of seat heights and foot placement positions on postural control in children with cerebral palsy during a sit-to-stand task. Res Dev Disabil. 43-44, 1-10 (2015).
- Breniere, Y., Do, M. C. When and how does steady state gait movement induced from upright posture begin?. J Biomech. 19 (12), 1035-1040 (1986).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J., Geurts, A. C. Falls in individuals with stroke. J Rehabil Res Dev. 45 (8), 1195-1213 (2008).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。