
このコンテンツを視聴するには、JoVE 購読が必要です。 サインイン又は無料トライアルを申し込む。
Method Article
シットにスタンド・アンド・ウォーク120%の膝の高さから:鉛四肢の動的姿勢制御の独立性を評価するための新しいアプローチ
要約
Here, we present a novel protocol to measure positional stability at key events during the sit-to-stand-to-walk using the center-of-pressure to the whole-body-center-of-mass distance. This was derived from the force platform and three-dimensional motion-capture technology. The paradigm is reliable and can be utilized for the assessment of neurologically compromised individuals.
要約
感覚病理などを持つ個人は、ストロークが困難(:STW座る・ツー・ウォーク)座って歩行を開始から上昇の一般的なタスクを実行しています。このように、シット・ツー・スタンドと歩行開始の臨床リハビリテーションの分離に - と呼ばシット・ツー・スタンド・アンド・ウォーク(STSWは) - 通常です。しかしながら、病理学的評価のために適した明確に定義された分析手法で標準化されたSTSWプロトコルが定義されていません。
したがって、ゴール指向のプロトコルは、それがリード手足のサポート独立した広いベースで120%の膝の高さから開始される立上り位相を要求することによって、健康で妥協個人に適して定義されます。 2次元(2D)センター・オブ・圧力(COP)を得た3次元(3D)セグメントの移動軌跡、及び力プラットフォームの光学キャプチャはCOPと全身-センターオブ間の水平距離の許可追跡を軌道質量(BCOM)、増加の減少位置安定性だが、貧困層の動的姿勢制御を表現することが提案されています。
BCOM-COPの距離はとし、被験者の脚の長さに正規化なしで発現されます。 COP-BCOM距離がSTSWを通じて変化する一方で、ステップ1と2の間にシートを切り、初期つま先オフ(TO1)の主要な移動イベントでの正規化されたデータは、10若い健康な個体によって実行される5繰り返し試験で低イントラ及びインター対象の変動を持っています。このように、若い健康な個体で上位運動ニューロン損傷患者、またはその他の危険にさらさ患者群、および規範的データとの間STSWパラダイムの実行中に重要なイベントでのCOP-BCOMの距離を比較して、動的姿勢の安定性の評価のための新規方法論です。
概要
脳卒中後の感覚システム、例えば上位運動ニューロン(UMN)損傷に影響を与える臨床病理は、負の運動に影響を与える可能性が弱さ、姿勢の安定性および痙性の損失、などの機能障害につながります。回復は安全立ったり1,2を歩くの機能マイルストーンを達成するために失敗脳卒中生存者のかなりの数が可変することができます。
歩行の離散的な実践と座る・ツー・スタンドUMN病理3,4の後に一般的なリハビリのタスクは、しかし、移行の動きが頻繁に無視されています。シットにウォーク(STW)は対スタンドシット(STS)、歩行開始(GI)を組み込む、および5を歩いシーケンシャル姿勢-運動タスクがあります。
STW時ためらいの反射STSとGIの分離は、古いunimpaireに加えて、パーキンソン病6および慢性脳卒中7を有する患者において観察されていますD大人8ではなく、若い健康な個体9インチしたがって、座る・ツー・スタンド・アンド・ウォーク(STSW)は、一般的に臨床環境内に実装されており、立ったときに、可変長の休止期が定義されています。しかし、患者集団に適したコンテキストでSTSWダイナミクスを定義する現在まで発表されたプロトコルはありません。
通常STWで最初の椅子の高さを研究(KH;床から膝までの距離)膝の高さの100%で、足幅やGI鉛四肢自己選択であり、腕は胸や生態学的に意味のあるタスクのコンテキスト全体で拘束されています5-9不在ことが多いです。しかし、患者が100%KH挑戦10から上昇見つけ、頻繁に健康な個体11に比べて、広い足の位置を採用し、その影響を受けた脚部7で歩行を開始し、勢い7を生成するために、彼らの武器を使用しています。
歩行、purposで全身運動の状態変化を開始するには eful方向が12必要です。これは、全身重心切り離すことにより達成される:中央の圧力(COPから(BCOMを空間13内のすべての考え身体セグメントの加重平均):得られた地面反力の位置(GRF)ベクトル14)。 GIの先行段階では、急速なステレオタイプの後部と揺動する四肢に向けてCOPの横方向の動きは、それによってBCOMの勢い12,15を発生させる発生します。それらの間の水平距離は、動的姿勢制御16の尺度として提案されたものとCOPとBCOMは、このように、分離されています。
COP-BCOMの距離の計算は、COPとBCOM位置の同時測定が必要です。 COPの標準的な計算は、式(1)17に次のようになります。

tp_upload / 54323 / 54323eq2.jpg "/>

(1)
Mと力はそれぞれ力プラットフォーム軸と方向性GRF周りのモーメントを表しています。添字は、軸を表します。原点は、接触面と力プラットフォームの原点との間の垂直距離であり、ゼロであると考えられます。
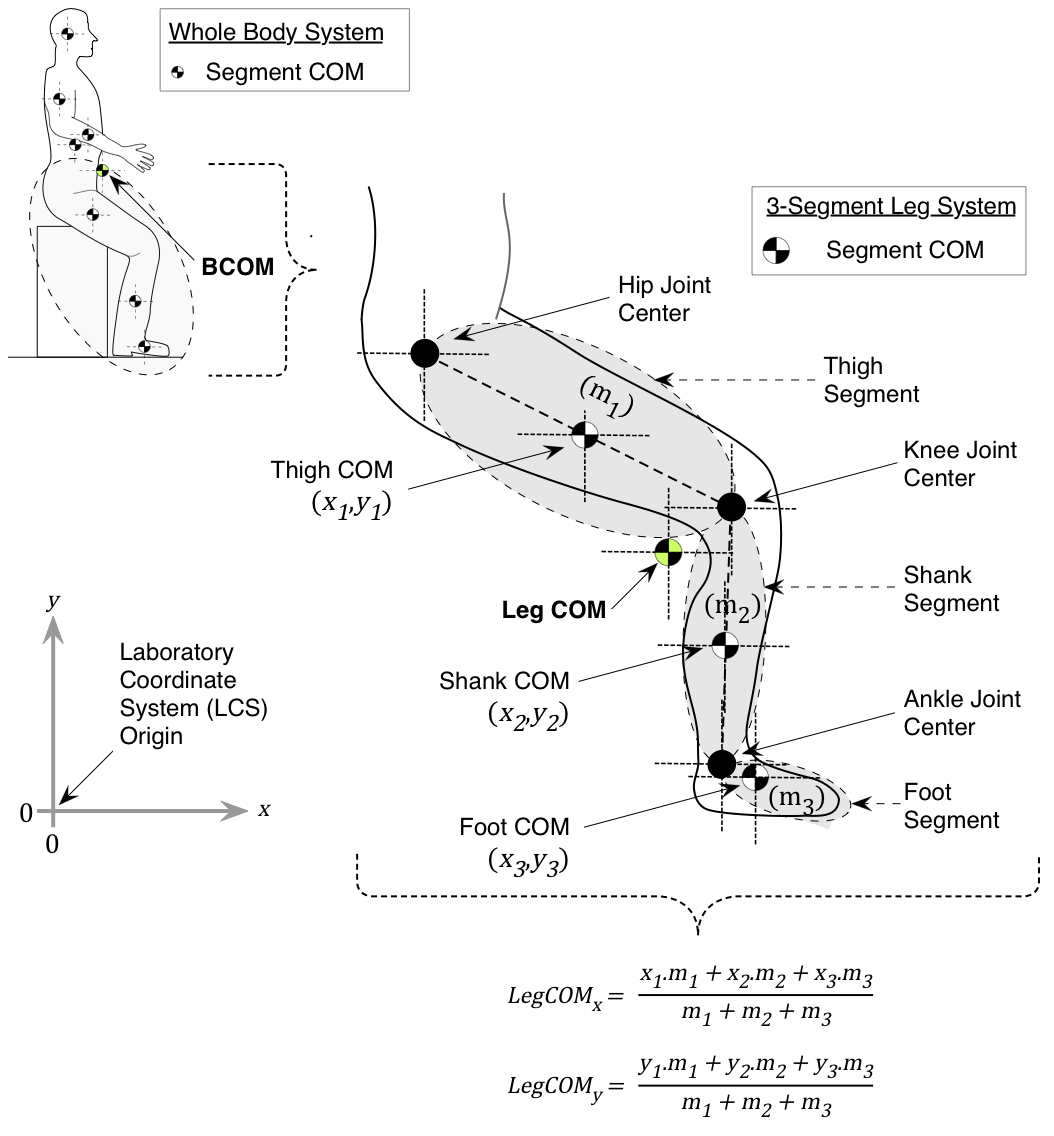
BCOM位置を導出する動方法は、セグメントマーカの変位を追跡することを含みます。身体セグメントの動きの忠実な表現は、軟組織アーチファクト(CAST法18)を最小化する、骨のランドマークから離れて配置された剛性板でクラスター化マーカーを使用することによって達成することができます。 BCOM位置を決定するために、個々の身体セグメントの質量は、死体のワーク19に基づいて、推定されます。三次元(3D)運動システム独自のソフトウェアは、近位およびdの座標位置を使用してistalセグメントの場所:1)セグメントの長さを決定するには、2)算術分節質量を推定し、3)セグメントCOMの位置を計算します。これらのモデルは、その後、セグメント間の位置の純和( 図1)に基づいて、特定の時点での3D BCOM位置の推定値を提供することができます。
したがって、本論文の目的は、生態学的に有効であり、高シート高さから上昇含まれ、標準化さSTSWプロトコルを提示する最初のものです。 STSW 120%からKHは、KHが侵害個人向けより簡単に(かつ安全)で120%から上昇を意味し、20を上昇中に下BCOM垂直速度とGRFのの100%KH禁止世代から生体力学的に不明瞭であることが以前に示されています。第二に、3Dモーションキャプチャを使用して、主要なマイルストーンと遷移中に動的な姿勢制御を評価するために、COP-BCOM水平距離を導出します。 STSW中に健康な個体で手足ルとは無関係である。このアプローチは、広告20は 、機能回復の評価の見通しを提供しています。最後に、若い健康な個体の予備STSWデータセットを表すが提示され、グループ内の内および対象間可変性は、病理学的個体との比較を通知するために定義されています。

図1は、2次元BCOM計算。簡略化のため、例えば、2次元、3結合塊から全脚COMの計算に基づいているそれぞれのCOM位置(x、y)、およびセグメントの質量(M 1の座標M 2、M 3)が知られています。セグメント大衆や実験に対する分節COM位置の位置は、(LCS;起源:0、0)座標系、対象体重および公開された人体計測データを用いて動き解析システム独自のソフトウェアによって推定されている(本文参照します)。 X AND Y脚COMの位置は、3-結合質量のこの例では、次に示す式を用いて導出されている。 この図の拡大版をご覧になるにはこちらをクリックしてください。
{kind=link}
プロトコル
プロトコルは、ロンドンサウスバンク大学研究倫理委員会の承認(UREC1413 / 2014)によって定義された人間の参加者のテストのために地元のガイドラインに従います。
1.歩行実験の準備
- 移動マーカーとして誤って解釈される場合があり、不要な反射物体のキャプチャボリュームをクリアし、必要に応じて反射を低減するために外光を排除します。
- モーションキャプチャカメラ、独自のトラッキングソフトウェア、力のプラットフォーム・アンプ、および外部のアナログ - デジタル(AD)変換器の電源をオンにします。カメラは初期化するための時間を許可します。
- キャプチャボリュームの両極端で少なくとも2交差軸が存在することを確実にカメラを配置します。個々のカメラはキャプチャボリューム空間内の試験マーカー( 例えば、静的キャリブレーションフレーム)の個々の点分解能をチェックすることにより、最適な露出や絞りの設定があることを確認してください(参考付録A 21を参照してください)。
- マウント対象スイッチは、被験者のへその高さで三脚に、進行方向に開始位置の前に、歩道の正中線で6メートルを視覚行く信号をオフにします。歩道の正中線で(視覚行く信号用)マウント光源、被験者の眼角の高さで三脚上の走行方向に対象スイッチの前面にある1メートル( 図2)。研究者に近接してオペレータ光スイッチを配置します。
- 力プラットフォーム1と歩行開始のための並列に2、および力プラットフォーム非支配的な鉛四肢の臨床試験をキャプチャするために互い違いにある3と4を配置します。そして、力のプラットフォームは、取り外し可能なテープでカバーして取り付けます。

2.実験プロトコル図 。この例では、左の脚のリードを示しています。対象は、120%の膝の高さ(KH)ウィットでインストルメント椅子に座りますhは離れて前方に向い肩幅で背屈と足に10°度を足首。視覚的な合図で、被験者は光をオフにすることで終了し、自己選択のペースで自分の非支配的な四肢と大手STSWの5件の試験を行う。 この図の拡大版をご覧になるにはこちらをクリックしてください。
{kind=link}
- 独自のトラッキングソフトウェアでは60ヘルツと3Dトラッキングパラメータにキャプチャ周波数を設定します。具体的には、20ミリメートル、2ミリメートル、2フレームに相当する最小の軌跡長、および10フレームの最大フレームギャップの最大残差の予測誤差を使用します。ディジタル変換器のそれぞれのアナログに各フォームプラットフォーム増幅器8から個々の力プラットフォームの各コンポーネントを識別するために行く(x3-4、y1-4、y2-3 Z1、Z2、Z3、Z4、X1-2)(この研究では32チャンネル)。
- 各力プラットフォームのcalibratioからすべての予め決めキャリブレーション設定を確認してくださいn個の文書、スケーリングファクタとアナログチャネルが指定されている(章プロジェクトのオプションを参照してください。アナログボード21)とアンロードするとき、キャプチャの最後の10フレームの間に読み取られるようにオフセットを指名します。
- 独自のトラッキングソフトウェアでは、適切なアナログサンプリング周波数を保証するために、モーションキャプチャ周波数逓倍器を指名。 1020ヘルツの個々の力プラットフォームサンプリング周波数を得、17の乗数を使用してください。
- ダイナミックワンドキャリブレーション手順を実装します。
- 3D空間のキャリブレーションの準備のためにキャプチャボリューム内の床にL字型の参照構造を置きます。この構造体の長軸が前方方向に向けなければなりません。 (チャプターワンド校正方法21を参照してください)。
- プロジェクトオプション]ダイアログボックスでキャリブレーション設定ページで、ワンドにキャリブレーション」タイプ」を選択し、750ミリメートルの長さ。その後、COORを選択上向き正のz軸と長い腕のような正のy軸にdinateシステムの向き(章のキャリブレーション21を参照してください)。 [OK]をクリックします。
- キャリブレーションのアイコンをクリックして、60秒に校正キャプチャの意図長さを設定します。その後、5秒の遅延時間を設定し、結果を保存するファイル・ディレクトリを識別します。キャリブレーション開始するには、[OK]をクリックします。
注:ワンド手順は、測定体積を較正するために、2つのキャリブレーション・オブジェクトを使用します。これは、大きなモーションキャプチャボリューム( 図3)の解像度を最大化するために使用されます。一つは、それに取り付けられた4つのマーカー静止L字型参照構造であり、グローバル座標系を定義するために使用されます。他の目的は、互いに一定の距離に位置する二つのマーカーから成るワンドです。較正、X、Yの間に、これらのZ方向は、X、Yに対してで4静的マーカーのZ位置を追跡しています基準構造上、今度は、三角測量予測し、3D空間内の移動マーカーの軌跡を再構築する独自のソフトウェアを可能にします。このプロセスの最後に、各カメラは、その精度の残留エラーを返します。 - (章ワンドキャリブレーション法21を参照してください)指定された60秒のための意図されたキャプチャボリュームの周りに杖を回転し、平行移動させることにより、較正容積内のキャリブレーション杖を移動します。
- <1.5ミリメートルの個々のカメラ残留誤差との校正を受け入れ、 校正結果を確認し 、[OK]をクリックします。
注:フォースプレートを持っている場合(それはおそらく、新しいキャリブレーションと変化しているので)再度、フォースプレートの位置を測定するのを指摘する警告があります。

3. L型参照構造とワンドは、カメラのための図キャリブレーション。L字型の参照構造は、静止したままで、それに取り付けられた4つのマーカーを持っています。ワンドは一定の距離でそれに取り付けられた2つのマーカーを有しており、移動させ、基準構造に関して、通過するように設定意図したマーカーのための十分である空間の3-D較正容積を作成する。 にはこちらをクリックしてくださいこの図の拡大版を表示します。
{kind=link}
- キャプチャボリュームから設定されたキャリブレーションを削除します。各プラットフォームの4隅の各々に1直径9mm受動逆反射マーカーを配置することによって校正3D空間内の力プラットフォームの位置を確認します(配置に注意が必要不可欠であり、章のフォースプレート場所21を参照してください)。 5秒の記録を入手し、独自のソフトウェアの提案どおりに、3D空間内の各マーカーおよび各プラットフォームの基準システム(PRS)を識別するために進んでください。
- 動的に着手その後の力の大きさと方向を確認し、センスチェックするために、前述のサンプリングと3Dトラッキングパラメータ(1.6)を使用してキャプチャします。
- 5秒の遅延で15秒間ダイナミックキャプチャを設定します。 キャプチャを開始するためにクリックが開始されると、オペレータは、椅子にポーズを座るスタンド、一時停止力プラットフォームと接触する前方歩く時間(この時点で、オペレータは、再帰反射を有するようにする必要がないましたその場で添付マーカー)。
- キャプチャが完了したら、力のプラットフォームの構成が正しいことを確認するために地面反ベクトルの方向と大きさを確認してください。上向きの期待と足の接触では旅行のベクトルの方向に後方、約1〜1.5倍の体重の最大垂直力。
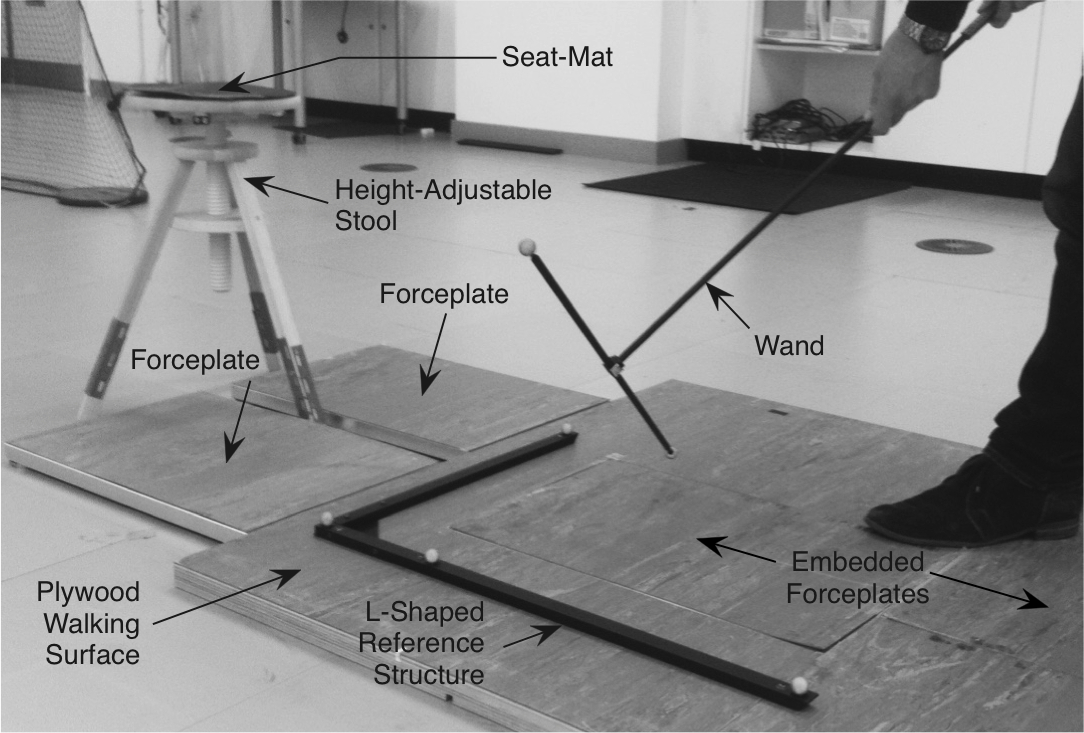
- 力プラットフォーム1及び2( 図2)との間にキャプチャボリュームの正中線に配置し、高さ調節可能なスツールは、その後、300ミリメートルのディアメを接続します外部ADコンバータへのター圧力席マット。
- 両面接着テープの一方の側に個別に取り付ける事前によって固定するためのすべてのパッシブ再帰反射解剖学的マーカーを準備し、長さ約15ミリメートル(対象あたり合計両面接着テープの少なくとも60センチ)とアプリケーションの準備ができて適切な場所に配置します被験者へ。タイムリーな本出願の準備ができて、トラッキングマーカークラスターと自己固定包帯が含まれます。
例えば、マーカーは、非共線形配列で配置された3逆反射マーカの最小値を含むべきであり、身体セグメントに配置されるトラッキング(推定関節中心に位置するいくつかの解剖学的マーカーは、トラッキングマーカーとして使用することができる第1および注第 5中足骨)。
2.件名の準備
- 包含/除外基準を満たす被験者から書面によるインフォームドコンセントを取得します。
- 適切な衣類に変更されることが掲載(サイクリング秒horts、ぴったりしたTシャツやスポーツブラなど適切な)。
- 被験者が安全にそうすることができる場合蹴りボールテスト22を使用して、支配的な下肢を確立します。
- 対象起立高さ(メートル)と質量(キログラム)を測定。重量(N)に質量を変換します。
- 件名立って、測定ノギスを用いて被験者双肩峰距離(m)を測定します。 (下記4.5を参照)足の位置決めのために距離を使用するには、キャリパーの位置をロックします。
- (スタンディングの)支配的な四肢の垂直床から膝までの距離(m)を測定します。 120%KH距離(m)を計算するために1.2によって距離を掛けます。 120%KHにスツールの高さを調整します。 表1は、膝の高さデータを含む10健常者の特性をまとめました。

表1:10の被験者全体の主題特性個々のデータと平均値(±1 SD)が示されています。
- マーカーの配置のための皮膚領域を準備します。必要に応じて、不要な体毛を剃るとアルコールを使用すると、マーカーと肌との密着性を最大化するために、過剰な汗および/または保湿剤を除去するためのワイプ。
- 、触診特定し、参照23( 表2)の選択された技術的なフレームに基づいて両面接着テープを使用して、より低いと上肢、体幹、頭部の解剖学的ランドマークや骨盤のセグメントに逆反射マーカーを適用します。自己固定包帯で分節トラッキングマーカーを適用するために行きます。
注:女性で、難易度は胸骨ノッチマーカーの位置を生じた場合 - スポーツブラの衣服の中心部の場所マーカーを。

表2:マーカーセット配置 。参照23の以前に報告された技術的なフレームに基づいてマーカー(解剖学的および追跡) 。
- キャプチャボリュームの中に入ると解剖学的位置を採用する対象下さい。この時点で、対象は、静的なキャプチャが原因でこの解剖学的位置での衣服の上から股関節の中心を推定する固有の問題に実行された後まで移動してはいけません。
3.静的キャプチャー
- その場ですべての解剖学的およびトラッキングマーカーと、フランクフルト平面を想定し、キャプチャボリュームの中心に静止して立って、被験者に指示します。
注:軟組織のアーティファクトを低減するために、静的キャリブレーションは、in situでの解剖学的および追跡マーカーで行われます。トラッキングマーカーは、関節センターは、皮膚の下に移動しないと仮定しての制限を否定する解剖学的マーカー、を基準にしています。トラッキングマーカーは、その後の動的試験のためにその場に放置されています。これは、較正された解剖学的システムの技術(CAST)18と呼ばれます。- 短い静的キャプチャを行うためには、前述のサンプリングおよび3Dトラッキングパラメータ(1.6)を使用し、3Dリアルタイムモードで未確認軌跡パネルにリストされたマーカーの合計数を確認することにより、すべてのマーカーがキャプチャボリュームに計上されていることを確認。これは、基準の選択された技術的なフレームが必要とマーカーの総数に対応している必要があります。 5秒のキャプチャを完了するために、レコードのアイコンをクリックします。必要に応じてマーカーが不足している手順を繰り返し。
注:静的なキャプチャデータの処理については、以下のセクション6を参照してください。
- 短い静的キャプチャを行うためには、前述のサンプリングおよび3Dトラッキングパラメータ(1.6)を使用し、3Dリアルタイムモードで未確認軌跡パネルにリストされたマーカーの合計数を確認することにより、すべてのマーカーがキャプチャボリュームに計上されていることを確認。これは、基準の選択された技術的なフレームが必要とマーカーの総数に対応している必要があります。 5秒のキャプチャを完了するために、レコードのアイコンをクリックします。必要に応じてマーカーが不足している手順を繰り返し。
- (下記の7.11を参照)は、距離の正規化のための脚の長さ(床に股関節-中心からの距離を(下の図3b 7.1と表を参照))を決定するために、被写体支配側の股関節中心のランドマークからの位置データを使用してください。
4.ファミリア
- すべての解剖学的専用マーカーを削除します。
- 座るの対象に指示個々の力のプラットホーム1&2上の足でスツールに。
- 立つと、定義された大手レッグに前方歩くの対象に指示します。被験者は一貫して歩行の第2段階の間に力プラットフォーム3と4との中央接触するまでスツールの前後位置を調整します。被験者が快適になるまで繰り返し練習試行を許可します。
- スツールの位置を再確立するために、床面にテープでスツールの前脚の位置をマークします。
- ( 図2)最終的な足の位置を設定します。伸縮アームゴニオメータを用いて対象者の支配的な側に垂直から10°後方にシャンク位置を調整し、個々の力プラットフォーム1と2の足で椅子に座るの対象にして下さい。ロックされたキャリパーを使用して、その行に均等に非支配的な足を調整するために行く、それに応じて横方向の足の境界間の予め決められた双肩峰距離に間足幅を手配し、(上記2.5を参照)。
- 各内側足の境界は進行方向に沿って配置されていること、各足の横断面方位を調整します。
- 最後にアラインメントをチェックした後、リムーバブル力プラットフォーム表面上にドライボードマーカーペンを使用して、最終的な足の位置の周りに描きます。
- 口頭で命令を使用します。。 "あなたは光があなたの前に来る参照すると、立ち上がって停止精神時点で3〜1、1番号からカウントダウン次に、あなたの非支配的な脚でリードし、で歩きます光の前にスイッチへの快適なペースと停止します。一度、1まで3から精神的に1の数をカウントし、その後、あなたの文章の手で「光をオフにするスイッチを使用します。
- 再反復彼らは自然に自分の腕を使用してもよい対象に、その後、対象十分習熟プロトコルをSTSWすることができます。習熟は、彼らが効率的に達成することができます保証するテスト環境に順応するために、対象に、できるだけ多くの時間を与えますそうでなければ、実験パラダイムの生態学的妥当性に衝突する可能性のあるすべての強制的な動きのないタスク。
5. STSWダイナミックトライアル
- 被験者は最初の3Dリアルタイム・モードで身元不明の軌跡パネルにリストされたマーカーの合計数を確認し、それらが参照の選択された技術的なフレームが必要とマーカーの総数と一致していることを、動的試験のための準備ができて椅子に座っています。その後、15秒ダイナミックキャプチャを完了するために、レコードのアイコンをクリックします。
- 5秒のキャプチャ後、オペレータ光スイッチをオンにして、被験者がどのように応答するかをチェック - 彼らは、糞便から上昇し、プラットフォーム3と4を強制的に上のステップ、指示どおりに一時停止していることを、彼らは停止し、指示に従って、光をオフにすることキャプチャ期間内。
- 光スイッチを再設定し、裁判のスローモーション再生中にすべてのマーカーを考慮することにより、マーカードロップアウトを確認してください。 necessa場合繰り返しますRY、そうでない場合は次の試行に進みます。各被験者にSTSWの5件の試験をキャプチャするために移動します。
- 付着していないとなって解剖学的マーカーの場合には、所定の皮膚マークに再接続します。トラッキングマーカーが移動した場合、解剖学的マーカーを再添付し、静的トライアルを繰り返す - 残りの動的試験を続行します。
6.独自のトラッキングソフトウェア後処理
- 独自のトラッキングソフトウェアでは、タスクの開始と終了に時間スライドを移動させることにより、静的および動的試験(軌道21の章マニュアルの名称を参照してください)と作物不要なキャプチャからすべてのマーカーを同定し、ラベルを付けます。それ以外の場合はAIM、標識化を支援するための独自のトラッキングソフトウェアの機能(章では、AIMモデル21の生成を参照してください)として知られ、「マーカーの自動識別」を利用。
注:マーカーの標識は必要とされているので、独自の、その後の生体力学解析ソフトウェア一貫して構築し、3次元空間における剛体の相対的な軌跡を算出します。 表2に示すように、意味のあるラベル付けを使用してください。AIMは、被験者固有のものですが、継続的に更新されます。別の件名で、貧しいAIMの場合には、手動の標識によってAIMを更新するために行きます。また、これは静的な取得プロセス(上記のセクション3.1.1を参照)に適用されます。 - マーカーの場合には未確認の軌道パネルで不足している軌道を見つけ、または手動でギャップフィル独自のソフトウェアが提供する多項式補間機能を使用してのいずれかに進み、10フレームを超えること、ドロップアウト(章のギャップが軌道21を塗りつぶし参照) 。
注:いくつかのケースでは、マーカーの軌道は、部分的に存在せず、ギャップ充填が欠落データを数学的に欠落データの前と後に測定した軌跡に基づいて推定することができる機構です。 - フォーマットAN生体力学解析ソフトウェアで後処理のために、C3Dの形式で、すべての静的および動的試験をエクスポートdは。
エクスポートする前に、すべての未確認と空のマーカの軌跡を除外し、事実上の標識を指定し、それぞれのフォースプレートのためのゼロフォースベースラインレベルのために、最後の10フレームを指名:注意してください。
7.バイオメカニクス解析ソフトウェア後処理
- 静的13セグメントモデル23を構築(足、すね、太もも、骨盤、体幹、上腕、前腕およびヘッド(全く手を注意していません))。
注:モデル構築のプロセスは24を使用した静的な測定試験とプロプライエタリソフトウェア命令に基づいて、リンクされたセグメントを定義する際の基本である。このプロトコルでは、解剖学的、各身体セグメント( 表3a)と継手中心の場所のための座標系( 表3bと )は、機能時間を回避するために適応して、主レンら 23に基づいていますIPおよび肩甲上腕関節中心推定。すべての継手中心位置に対する金の基準は、ほとんどの状況では非現実的であり、磁気共鳴イメージング(MRI)などのイメージング技術、残ります。機能性関節中心の推定が利用されてきました。しかしながら、病変を有する患者は必要な面25に関節を動かすことができなくなる危険性が残ります。そのため、骨盤の回帰式のために、 例えば、デイビス26が使用されることが多いです。ここでは、CODAは27を使用した骨盤とベルらの作業に基づいている。28、および肩甲上腕関節センターはイームズらによると推定した。29。

表3a: 解剖は全身モデルのための座標系。

表3bに:全身モデルのための共同センターの定義。
- 動的なファイルをインポートし、それぞれにモデルを割り当てます。セグメントの通常の視覚的な構成をチェックすることにより、モデル構築の精度を確認してください。不正確の場合、オペレータは、バック独自のトラッキングソフトウェアのファイルに移動して、センサ画像追跡プロファイルを確認し、必要に応じて修正することをお勧めします。
- ローパスフィルタ動とバターワースがそれぞれ6 Hzから25 Hzで、カットオフ周波数とフィルタ4 番目の順序を使用して動的データ。
- 25フレームのウィンドウの上に平均フィルタ光と圧力マットアナログ信号。
- 力プラットフォーム1、2、3、および4.コーナーための力の構造を作成すると、すべての4力プラットフォーム( 図4)を包含するレベル浮上し、長方形の構造を作成するために調整します。
注:力構造がネットCOPの計算は4力のプラットフォーム間で行うことができるようにするために30を必要とされます。 私> - ネットCOPは実験室内の信号(xとy)を座標計算力構造からシステム(LCS)を座標。
注:ソフトウェアは、以下の方程式2A-Gを使用してこれを行います。- 2FとLCS内のネットCOPの位置のための2グラムの式から、xとyの信号を使用してください。
(図2a)ネット内外方向の力
(図2b)純前後力
(図2c)純垂直方向の力
(2D)x軸に関するネットプラットフォームの瞬間
(2E) のy -軸に関するネットプラットフォームの瞬間nは8 "SRC =" /ファイル/ ftp_upload / 54323 / 54323eq8.jpg "/>
(2F)正味の力の印加点の-座標をX(COP x)から 
(2グラム)正味の力の印加点(COPの Y) のy -座標

図4.フォース構造。右のリードイン四肢の向きで4力のプラットフォームを包含する矩形の力構造の例。実験室座標系(LCS)に対するローカルCOPアプリケーションの詳細と寸法は、一例として、力のプラットフォーム1について示されています。プラットフォーム参照システム(PRS)のX、Y、Z位置Lに対してずれています CS X 1及びY 1は 、それぞれ、PRSから内外および前後の距離を表します。 x軸については、個々のプラットフォームモーメントを計算するために(Y 1 + Y 1)を 、縦GRFはローカル座標のy COPの合計によって乗算され、新しいPRSは、LCSは、y座標のオフセット。 (X 1 + X 1) - Y回りのモーメント座標-axisは、同様のxオフセットローカル座標のx COPの負の和座標と新しいPRS-LCSによって垂直GRFを乗じて算出されます。世界的な力の構造についての力の合計モーメントは、個々の垂直力の合計で割った力のモーメントのすべての和に等しいです。ネットCOP XとY座標は、このようにLCS(方程式2A-g)の内力構造のために製造されています。large.jpg "ターゲット=" _空白 ">この図の拡大版をご覧になるにはこちらをクリックしてください。
- カスタマイズされたパイプラインのコマンドを使用して、STSW内に特異的に直立着座オフ、歩行開始発症、最初のつま先オフ1、および第1および第2の初期接点( 表4)重要な運動イベントを作成します。

表4:運動イベントの定義 GI -歩行開始。 COP - 中心の圧力; HO1 - 最初のかかとオフ。 TO1 - 第一つま先オフ、IC1 - 第一最初の接触。
- カスタマイズされたパイプライン・コマンドを使用すると、T iが所定のイベントを表す各移動イベント、で式3を適用することにより、COP-BCOM距離(L)を算出します 。

(3) - カスタマイズされたパイプライン・コマンドを使用して、2つのイベント(T 0→T I)との間に式(4)を適用することによって最大COP-BCOM距離(L max)を計算します。

(4)
ここで、 時刻t 0とt iの移動開始とそれぞれ関心の最後の時間インスタンス、(XのCOP( トンi)を )表すのx、時刻t iにおけるCOPの座標であり、(X BCOM さ(t i))が座標であります時刻tにおけるBCOMのI、及び(YのCOP(T i)を )及び(Y軸BCOM(T i)は )yの対応する値は、31座標です。 - 移動イベントで関心の従属変数を抽出します。座席オフとfにおけるCOP-BCOM距離IRSTつま先オフ(TO1)イベント、および(TO1と第一の初期接触間; IC1) 第1工程段階の間に最大COP-BCOM距離カスタマイズされたパイプラインのコマンドを使用し、(IC1とIC2の間の)2 番目のステップの段階。
- 対象者の支配的な足の長さの割合として被検体内COP-BCOM距離を正規化する(上記3.2を参照)。
- 機能性をクリップボードにコピーを使用して統計分析のために、または他の利用可能なネイティブ形式のファイルをエクスポートすることにより、データをエクスポートします。
8.ラボ固有の規範的価値計算
- 被験者の支配的な下肢長の割合として実際のCOP-BCOM距離と正規化された値の両方の平均(±1 SD)内と被験者間の値を計算します。
- 平均被験者間のデータの変動係数(COV)を計算します。
- 双方向混合効果モデルのクラス内の相関係数を使用して、イベントごとに被検体内の変動を計算する(ICC 3,1)、および測定誤差32。
結果
すべての被験者は、指示通りに、それらの非支配的な肢でリードし、双子の力プラットフォーム上に配置された自分の足で上昇しました。通常の歩行は、他のプラットフォーム上にきれいにステッピングの被験者で観察されたと3D光学ベースのモーション解析が正常に120%KHから上昇5繰り返しゴール指向STSW作業時に全身の動きを追跡しました。同時COPとBCOM(ML)と前?...
ディスカッション
ここで定義されたシット・ツー・スタンド・アンド・ウォーク(STSW)プロトコルは、健康な個体または患者群における複雑な過渡的移動中に動的な姿勢制御をテストするために使用することができます。プロトコルは、病理を有する被験者が参加できるように設計されている制約を含み、光をオフを含めることは、それが生態学的に有効と目標志向であることを意味します。それは、鉛四肢...
開示事項
The authors have no competing financial interests to disclose.
謝辞
著者は彼らの実用的なサポートのためにロンドンサウスバンク大学キングス・カレッジ・ロンドンとビル・アンダーソンでトニー・クリストファー、リンジーマジョラムに感謝したいと思います。このプロジェクトのためのデータを収集中で彼女の助けのためにロンドン大学キングスカレッジでエレノア・ジョーンズにもありがとうございます。
資料
| Name | Company | Catalog Number | Comments |
| Motion Tracking Cameras | Qualysis (Qualysis AB Gothenburg, Sweden) | Oqus 300+ | n= 8 |
| Qualysis Track Manager (QTM) | Qualysis (Qualysis AB Gothenburg, Sweden) | QTM 2.9 Build No: 1697 | Proprietary tracking software |
| Force Platform Amplifier | Kistler Instruments, Hook, UK | 5233A | n= 4 |
| Force Platform | Kistler Instruments, Hook, UK | 9281E | n= 4 |
| AD Converter | Qualysis (Qualysis AB Gothenburg, Sweden) | 230599 | |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B01 | n= 2 |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B02 | n= 4 |
| 4 Point "L-Shaped" Calibration Frame | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| "T-Shaped" Wand | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| 12 mm Diameter Passive Retro reflective Marker | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160181 | Flat Base |
| Double Adhesive Tape | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160188 | For fixing markers to skin |
| Height-Adjustable Stool | Ikea, Sweden | Svenerik | Height 43 - 58 cm with ~ 10cm customized height extension option at each leg |
| Circular (Disc) Pressure Floor Pad | Arun Electronics Ltd, Sussex, UK | PM10 | 305 mm Diameter, 3 mm thickness, 2 wire |
| Lower Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160145 | 2 Marker clusters, lower body with 8 markers (n= 2) |
| Upper Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160146 | 2 Marker clusters, lower body with 6 markers (n= 2) |
| Self-Securing Bandage | Fabrifoam, PA, USA | 3'' x 5' | |
| Cycling Skull Cap | Dhb | Windslam | |
| Digital Column Scale | Seca | 763 Digital Medical Scale w/ Stadiometer | |
| Measuring Caliper | Grip-On | Grip Jumbo Aluminum Caliper - Model no. 59070 | 24 in. Jaw |
| Extendable Arm Goniometer | Lafayette Instrument | Model 01135 | Gollehon |
| Light Switch | Custom made | ||
| Visual3D Biomechanics Analysis Software | C-Motion Inc., Germantown, MD, USA | Version 4.87 |
参考文献
- Duncan, P. W., Goldstein, L. B., Matchar, D., Divine, G. W., Feussner, J. Measurement of motor recovery after stroke. Outcome assessment and sample size requirements. Stroke. 23 (8), 1084-1089 (1992).
- Smith, M. T., Baer, G. D. Achievement of simple mobility milestones after stroke. Arch Phys Med Rehabil. 80 (4), 442-447 (1999).
- Langhorne, P., Bernhardt, J., Kwakkel, G. Stroke rehabilitation. Lancet. 377 (9778), 1693-1702 (2011).
- Veerbeek, J. M., et al. What is the evidence for physical therapy poststroke? A systematic review and meta-analysis. PLoS One. 9 (2), e87987 (2014).
- Magnan, A., McFadyen, B., St-Vincent, G. Modification of the sit-to-stand task with the addition of gait initiation. Gait Posture. 4 (3), 232-241 (1996).
- Buckley, T. A., Pitsikoulis, C., Hass, C. J. Dynamic postural stability during sit-to-walk transitions in Parkinson disease patients. Mov Disord. 23 (9), 1274-1280 (2008).
- Frykberg, G. E., Aberg, A. C., Halvorsen, K., Borg, J., Hirschfeld, H. Temporal coordination of the sit-to-walk task in subjects with stroke and in controls. Arch Phys Med Rehabil. 90 (6), 1009-1017 (2009).
- Dehail, P., et al. Kinematic and electromyographic analysis of rising from a chair during a "Sit-to-Walk" task in elderly subjects: role of strength. Clin Biomech (Bristol, Avon). 22 (10), 1096-1103 (2007).
- Buckley, T., Pitsikoulis, C., Barthelemy, E., Hass, C. J. Age impairs sit-to-walk motor performance. J Biomech. 42 (14), 2318-2322 (2009).
- Roy, G., et al. The effect of foot position and chair height on the asymmetry of vertical forces during sit-to-stand and stand-to-sit tasks in individuals with hemiparesis. Clin Biomech (Bristol, Avon). 21 (6), 585-593 (2006).
- Kubinski, S. N., McQueen, C. A., Sittloh, K. A., Dean, J. C. Walking with wider steps increases stance phase gluteus medius activity. Gait Posture. 41 (1), 130-135 (2015).
- Jian, Y., Winter, D. A., Ishac, M. G., Gilchrist, L. Trajectory of the body COG and COP during initiation and termination of gait. Gait Posture. 1 (1), 9-22 (1993).
- Winter, D. A. Human balance and posture control during standing and walking. Gait Posture. 3 (4), 193-214 (1995).
- Cavanagh, P. R. A technique for averaging center of pressure paths from a force platform. J Biomech. 11 (10-12), 487-491 (1978).
- Halliday, S. E., Winter, D. A., Frank, J. S., Patla, A. E., Prince, F. The initiation of gait in young, elderly, and Parkinson's disease subjects. Gait Posture. 8 (1), 8-14 (1998).
- Hass, C. J., Waddell, D. E., Fleming, R. P., Juncos, J. L., Gregor, R. J. Gait initiation and dynamic balance control in Parkinson's disease. Arch Phys Med Rehabil. 86 (11), 2172-2176 (2005).
- Winter, D. A., Patla, A. E., Ishac, M., Gage, W. H. Motor mechanisms of balance during quiet standing. J Electromyogr Kinesiol. 13 (1), 49-56 (2003).
- Cappozzo, A., Catani, F., Croce, U. D., Leardini, A. Position and orientation in space of bones during movement: anatomical frame definition and determination. Clin Biomech (Bristol, Avon). 10 (4), 171-178 (1995).
- Dempster, W. T., Gabel, W. C., Felts, W. J. The anthropometry of the manual work space for the seated subject. Am J Phys Anthropol. 17 (4), 289-317 (1959).
- Jones, G. D., James, D. C., Thacker, M., Jones, E. J., Green, D. A. Sit-to-Walk and Sit-to-Stand-and-Walk Task Dynamics are Maintained During Rising at an Elevated Seat-Height Independent of Lead-Limb in Healthy Individuals. Gait Posture. 48, 226-229 (2016).
- Qualysis AB. . Qualysis Track Manager User Manual. , (2011).
- Hoffman, M., Schrader, J., Applegate, T., Koceja, D. Unilateral postural control of the functionally dominant and nondominant extremities of healthy subjects. J Athl Train. 33 (4), 319-322 (1998).
- Ren, L., Jones, R. K., Howard, D. Whole body inverse dynamics over a complete gait cycle based only on measured kinematics. J Biomech. 41 (12), 2750-2759 (2008).
- C-Motion Wiki Documentation. . Tutorial: Building a Model. , (2013).
- Kainz, H., Carty, C. P., Modenese, L., Boyd, R. N., Lloyd, D. G. Estimation of the hip joint centre in human motion analysis: a systematic review. Clin Biomech (Bristol, Avon). 30 (4), 319-329 (2015).
- Harrington, M. E., Zavatsky, A. B., Lawson, S. E., Yuan, Z., Theologis, T. N. Prediction of the hip joint centre in adults, children, and patients with cerebral palsy based on magnetic resonance imaging. J Biomech. 40 (3), 595-602 (2007).
- C-Motion Wiki Documentation. . Coda Pelvis. , (2015).
- Bell, A. L., Brand, R. A., Pedersen, D. R. Prediction of hip joint centre location from external landmarks. Human movement science. 8 (1), 3-16 (1989).
- Eames, M. H. A., Cosgrove, A., Baker, R. Comparing methods of estimating the total body centre of mass in three-dimensions in normal and pathological gaits. Human movement science. 18 (5), 637-646 (1999).
- C-Motion Wiki Documentation. . Force Structures. , (2015).
- Martin, M., et al. Gait initiation in community-dwelling adults with Parkinson disease: comparison with older and younger adults without the disease. Phys Ther. 82 (6), 566-577 (2002).
- Bland, J. M., Altman, D. G. Measurement error. BMJ. 313 (7059), (1996).
- Hof, A. L. Scaling gait data to body size. Gait Posture. 4 (3), 222-223 (1996).
- Holden, J. P., Selbie, W. S., Stanhope, S. J. A proposed test to support the clinical movement analysis laboratory accreditation process. Gait Posture. 17 (3), 205-213 (2003).
- Baker, R. Gait analysis methods in rehabilitation. J Neuroeng Rehabil. 3, (2006).
- Gregory, C. M., Embry, A., Perry, L., Bowden, M. G. Quantifying human movement across the continuum of care: From lab to clinic to community. J Neurosci Methods. 231, 18-21 (2014).
- Pai, Y. C., Rogers, M. W. Segmental contributions to total body momentum in sit-to-stand. Medicine and Science in Sports and Exercise. 23 (2), 225-230 (1991).
- Hughes, M. A., Weiner, D. K., Schenkman, M. L., Long, R. M., Studenski, S. A. Chair rise strategies in the elderly. Clin Biomech (Bristol, Avon). 9 (3), 187-192 (1994).
- Medeiros, D. L., Conceição, J. S., Graciosa, M. D., Koch, D. B., Santos, M. J., Ries, L. G. The influence of seat heights and foot placement positions on postural control in children with cerebral palsy during a sit-to-stand task. Res Dev Disabil. 43-44, 1-10 (2015).
- Breniere, Y., Do, M. C. When and how does steady state gait movement induced from upright posture begin?. J Biomech. 19 (12), 1035-1040 (1986).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J., Geurts, A. C. Falls in individuals with stroke. J Rehabil Res Dev. 45 (8), 1195-1213 (2008).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved