
Zum Anzeigen dieser Inhalte ist ein JoVE-Abonnement erforderlich. Melden Sie sich an oder starten Sie Ihre kostenlose Testversion.
Method Article
Sit-to-Stand-und-Fuß von 120% Kniehöhe: Ein neuartiger Ansatz zur Beurteilung Dynamische Postural Steuerung Unabhängig von Blei-Glied
In diesem Artikel
Zusammenfassung
Here, we present a novel protocol to measure positional stability at key events during the sit-to-stand-to-walk using the center-of-pressure to the whole-body-center-of-mass distance. This was derived from the force platform and three-dimensional motion-capture technology. The paradigm is reliable and can be utilized for the assessment of neurologically compromised individuals.
Zusammenfassung
Personen mit dem sensomotorischen Pathologie zB Schlaganfall Schwierigkeiten haben , die gemeinsame Aufgabe , Aufstehen aus dem Sitzen ausgeführt wird und die Einleitung Gangart (Sit-to-Wanderung: STW). So wird in der klinischen Rehabilitation Trennung von Sit-to-Stand und Gang Initiation - genannt Sit-to-Stand-und-Fuß (STSW) - ist üblich. Allerdings ist ein standardisiertes Protokoll STSW mit einem klar definierten analytischen Ansatz geeignet für die pathologische Beurteilung noch definiert werden.
Somit wird ein zielorientiertes Protokoll definiert, das geeignet ist für eine gesunde und geschwächten Personen durch die ansteigende Phase erfordern mit einer breiten Basis der Unterstützung unabhängig von Blei Glied aus 120% Kniehöhe eingeleitet werden. Optische Erfassung von dreidimensionalen (3D) segmentale Bewegungsbahnen und Kraft-Plattformen zu liefern zweidimensionale (2D) Mitte-of-Druck (COP) Trajektorien erlauben Verfolgung des horizontalen Abstands zwischen COP und Ganzkörper-Center-of- Masse (BCOM), die Abnahme von denen erhöhenLagestabilität s aber wird vorgeschlagen, schlechte dynamische Haltungskontrolle zu repräsentieren.
BCOM-COP Abstand wird mit und ohne Normierung auf Themen "Beinlänge ausgedrückt. Während COP-BCOM Strecken durch STSW, normalisierte Daten an den zentralen Bewegungsereignisse Sitz-off variieren und erste toe-off (TO1) während der Schritte 1 und 2 haben eine geringe intra- und interindividuelle Variabilität in 5 wiederholten Versuchen von 10 jungen, gesunden Personen durchgeführt . Somit wird bei wichtigen Ereignissen während der Durchführung eines STSW Paradigma zwischen Patienten mit oberen Motoneuron-Verletzungen oder andere gefährdet Patientengruppen COP-BCOM Abstand zu vergleichen, und normative Daten bei jungen gesunden Menschen ist eine neuartige Methode für die Bewertung der dynamischen Haltungsstabilität.
Einleitung
Klinische Pathologie der sensomotorischen Systeme zu beeinflussen, zum Beispiel oberen Motoneuron (UMN) Verletzung nach einem Schlaganfall führen zu Funktionsstörungen einschließlich Schwäche, Verlust der Haltungsstabilität und Spastik, die sich negativ auf die Fortbewegung beeinflussen können. Die Wiederherstellung kann mit einer signifikanten Anzahl von Schlaganfallpatienten variabel sein Versagen der funktionellen Meilensteine der sicheren Stand zu erreichen oder zu Fuß 1,2.
Die diskrete Praxis des Gehens und Sit-to-Stand sind häufig rehabilitative Aufgaben nach UMN Pathologie 3,4 sind jedoch Übergangsbewegungen häufig vernachlässigt. Sit-to-Spaziergang (STW) ist eine sequentielle Haltungs-Bewegungs Aufgabe beinhaltet Sit-to-Stand (STS), Gang Einleitung (GI), und zu Fuß 5.
Die Trennung von STS und GI, reflektierende des Zögerns bei STW wurde bei Patienten mit Parkinson-Krankheit 6 und chronischem Schlaganfall 7, zusätzlich zu den älteren unimpaire beobachtetd Erwachsene 8, aber nicht bei jungen gesunden Individuen 9. Daher sitzen-to-Stand-and-Fuß (STSW) wird üblicherweise in der klinischen Umgebung implementiert und wird von einer Pausenphase von variabler Länge definiert, beim Stehen. Jedoch gibt es keine veröffentlichten Protokolle bisher definieren STSW Dynamik in einem Kontext geeignet für Patientengruppen.
Normalerweise in STW Studien der Anfangsstuhlhöhe beträgt 100% der Kniehöhe (KH; vom Boden bis zur Knieabstand), Fuß-Breite und GI Blei-Schenkel sind selbst ausgewählt, die Arme sind über der Brust und eine ökologisch sinnvolle Aufgabenkontext eingeschränkt oft fehlt 5-9. Jedoch dürfen Patienten aus 100% KH herausfordernd 10 finden steigenden und häufig eine breitere Fußstellung im Vergleich zu gesunden Personen 11, initiieren Gang mit ihren betroffenen Bein 7, zu verabschieden und ihre Arme benutzen , um Schwung 7 erzeugen.
Zur Einleitung Gang, eine Zustandsänderung in Ganzkörper-Bewegung in einer purpos eful Richtung 12 erforderlich. (: Der gewichtete Durchschnitt aller betrachteten Körpersegmente in Raum 13 BCOM) von der Mitte-of-Druck (COP: die Position des resultierenden Bodenreaktionskraft (GRF) Dies wird durch Entkoppeln der Ganzkörper - Center-of-Masse erreicht Vektor - 14). In der Phase der antizipatorische GI, schnelle stereotypisch posterior und lateraler Bewegung der COP in Richtung des Schenkels geschwenkt werden , erfolgt dabei BCOM Impuls 12,15 erzeugen. Die COP und BCOM werden somit getrennt, mit der horizontale Abstand zwischen ihnen als Maß der dynamischen Haltungskontrolle 16 vorgeschlagen wurde.
Die Berechnung des COP-BCOM Abstand erfordert gleichzeitige Messung der COP und BCOM Positionen. Die Standard - Berechnung der COP ist unten in Gleichung (1) 17 gezeigt:

tp_upload / 54323 / 54323eq2.jpg "/>

(1)
Wo M und Kraft darstellen Momente um die Kraftplattform Achsen und dem Richtungs GRF sind. Die Indizes repräsentieren Achsen. Der Ursprung ist der vertikale Abstand zwischen der Kontaktfläche und dem Ursprung der Kraftplattform, und wird als Null.
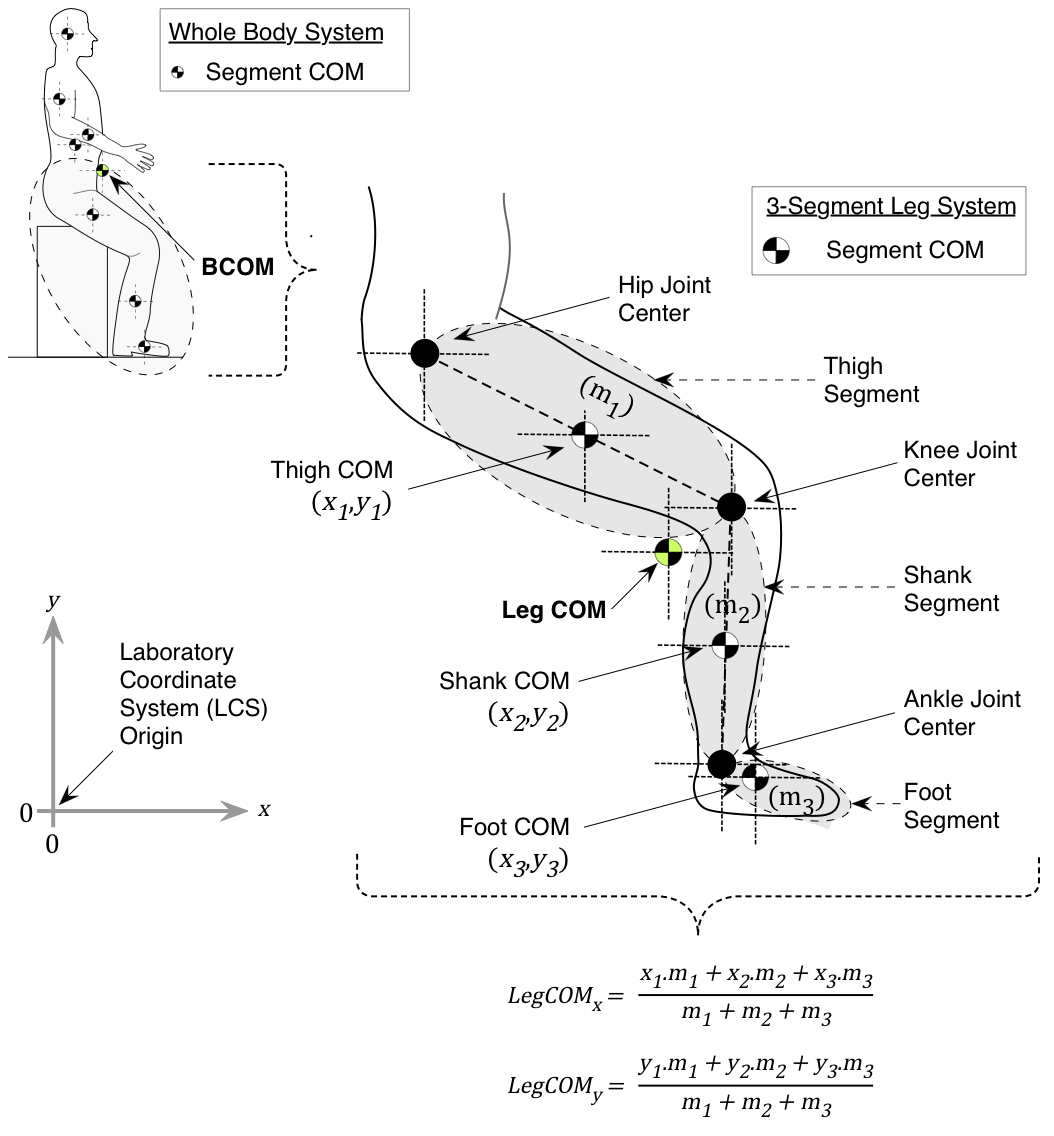
Die kinematische Methode BCOM Position abzuleiten beinhaltet die Verschiebung der Segmentmarken zu verfolgen. Eine originalgetreue Darstellung von Körper-Segment Bewegung kann durch den Einsatz von Markern gruppierten auf starren Platten angeordnet weg von knöchernen Sehenswürdigkeiten, zu minimieren Weichgewebe-Artefakt (CAST - Technik 18) erreicht werden. Um BCOM Position, einzelne Körpersegment Massen zu bestimmen , werden geschätzt, basierend auf cadaveric Arbeit 19. Dreidimensionale (3D) Bewegungssystem proprietärer Software verwendet die Koordinatenpositionen von proximal und distal Segment Standorte: 1) bestimmen Segmentlängen, 2) schätzen arithmetisch Segmentmassen und 3) berechnen Segment COM Standorten. Diese Modelle können dann Schätzungen der Position 3D BCOM bereitzustellen zu einem gegebenen Zeitpunkt auf der Basis des Netto - Summierung der Intersegmentpositionen (Abbildung 1).
Damit ist der Zweck dieses Papiers zunächst ein standardisiertes STSW Protokoll zu präsentieren, die ökologisch gültig ist, und umfasst von einer hohen Sitzhöhe steigt. Es wurde bereits , dass STSW von 120% gezeigt KH aus 100% KH Barring Erzeugung unteren BCOM Vertikalgeschwindigkeiten und GRF biomechanisch undeutlich 20 während steigt, was bedeutet , von 120% steigt KH ist einfacher (und sicherere) für geschwächten Personen. Zweitens COP-BCOM horizontale Entfernungen abzuleiten während wichtige Meilensteine und Übergänge mit Hilfe von 3D Motion-Capture-dynamischen Haltungskontrolle zu bewerten. Dieser Ansatz, der bei gesunden Menschen während STSW unabhängig ist von Gliedmaßen-lead 20, bietet die Aussicht auf die funktionelle Erholung Auswertung. Schließlich wird ein vorläufiger STSW Datensatz Vertreter der jungen gesunden Menschen präsentiert und intra und interindividuelle Variabilität in der Gruppe um den Vergleich mit pathologischen Individuen zu informieren definiert ist.

Abbildung 1. 2D BCOM Berechnung. Zur Vereinfachung wird das Beispiel , basierend auf der Berechnung Ganz Bein COM von einem 3-linked Masse in zwei Dimensionen, wobei Koordinaten der jeweiligen COM Positionen (x, y) und segmental Massen (m 1, m 2, m 3) , sind bekannt. Segmentmassen und Lage der Segment COM Positionen in Bezug auf Labor-Koordinatensystem (LCS; Herkunft: 0, 0), geschätzt durch Bewegungsanalysesystem proprietäre Software Thema Körpermasse und veröffentlicht anthropometrischen Daten (siehe Haupttext). Die x and y Bein COM Position, in diesem Beispiel der 3-verknüpften Masse wird dann abgeleitet , um die Formeln dargestellt. Bitte klicken Sie hier , um eine größere Version dieser Figur zu sehen.
{kind=link}
Protokoll
Das Protokoll folgt den örtlichen Richtlinien für die Prüfung von menschlichen Teilnehmern, definiert durch London South Bank University Forschungsethikkommission Genehmigung (UREC1413 / 2014).
1. Gait Laboratory Vorbereitung
- Deaktivieren Sie das Capture-Volumen von unerwünschten reflektierenden Objekten, die als Bewegungsmarker werden falsch interpretiert kann und eliminieren Umgebungs Tageslicht zu reduzieren Reflexionen als angemessen.
- Schalten Sie Motion-Capture-Kameras, proprietäre Tracking-Software, Kraftplattform Verstärker und externe Analog-Digital-Wandler (AD). Nehmen Sie sich Zeit für die Kameras zu initialisieren.
- Anordnen Kameras gewährleistet, dass es mindestens zwei sich schneidende Achsen an den Extremen des Erfassungsvolumens sind. Stellen Sie sicher , einzelne Kameras haben eine optimale Belichtung und Blende durch Überprüfung einzelner Punkt-Auflösung von Testmarken (zB die statische Kalibrationsbildes) innerhalb Capture Volumenraum (siehe Referenz Anhang A 21).
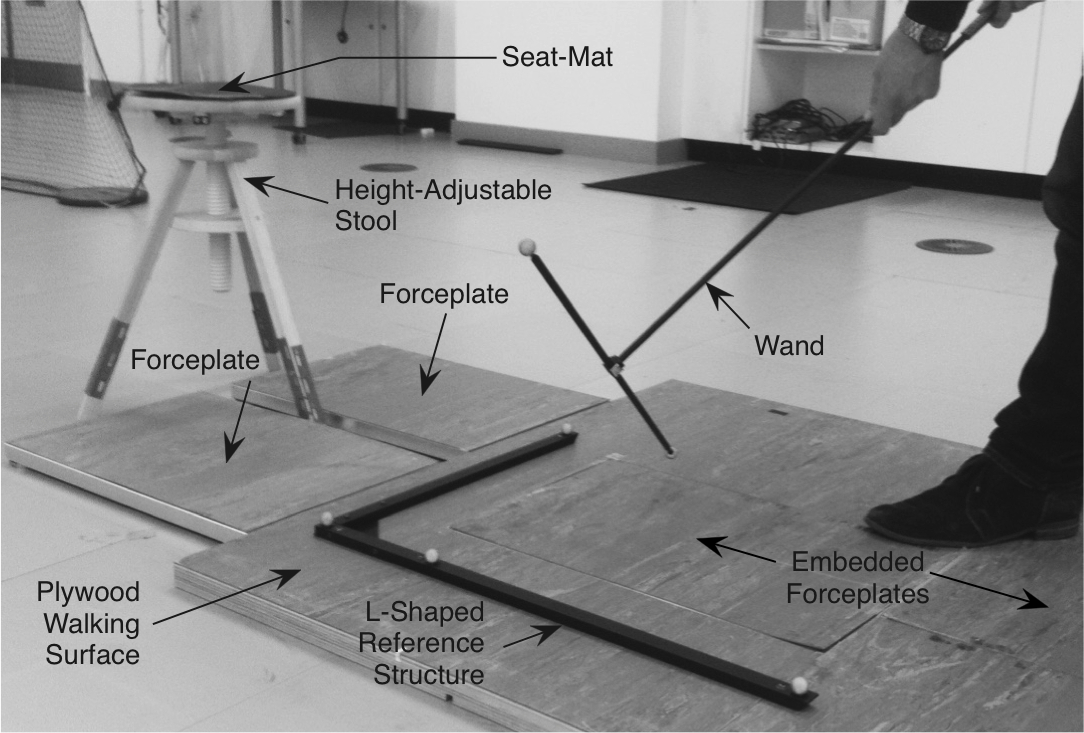
- Berg fach Schalter auf visuelle Go-Signal in der Mittellinie des Gehwegs, 6 m vor der Startposition in Fahrtrichtung, auf einem Stativ in Thema Nabel Höhe auszuschalten. Berg Lichtquelle (für visuelle Go - Signal) in der Mittellinie des Gehwegs, 1 m vor dem Subjekt-Schalter in Fahrtrichtung, auf einem Stativ in Subjekts canthus Höhe (Abbildung 2). Ordnen Sie den Bediener Lichtschalter in der Nähe der Ermittler.
- Vereinbaren Kraft-Plattformen 1 und 2 parallel zur Ganginitiierung und Kraft-Plattformen 3 und 4 in einer versetzten Konfiguration nicht-dominanten Blei-Glied Studien zu erfassen. Dann befestigen Kraftplattform mit abnehmbaren Band abdeckt.

Abbildung 2. Versuchsprotokoll. Dieses Beispiel zeigt eine Links Bein führen: Die Gegenstände auf einer instrumentierten Hocker bei 120% Kniehöhe sitzen (KH) Witzh Knöcheln 10 ° Grad in Dorsalflexion und Füße schulterbreit auseinander nach vorne orientiert. Auf einem visuellen Hinweis, Themen durchführen 5 Versuche von STSW mit ihren nicht-dominante Glied an selbstgewählten Tempo durch das Abschalten der Licht beendet führt. Bitte klicken Sie hier , um eine größere Version dieser Figur zu sehen.
{kind=link}
- In der proprietären Tracking-Software-Set-Capture-Frequenz auf 60 Hz und 3D-Tracking-Parameter. Insbesondere wird ein Vorhersagefehler von 20 mm zu verwenden, eine maximale Rest von 2 mm, Mindestlänge Trajektorie entspricht 2 Rahmen und einer maximalen Bildspalt von 10 Frames. Gehen Sie auf jedem der acht einzelnen Kraftplattformkomponenten identifizieren (z1, z2, z3, z4, X1-2. X3-4, y1-4, y2-3) von jeder Form Plattform Verstärker in den jeweiligen Analog-Digital-Wandler ( 32 Kanäle in dieser Studie).
- Sicherstellen, dass alle vorgegebenen Kalibrierungseinstellungen von jedem Eichun der Kraftplattformn Dokumentation, Skalierungsfaktoren und analoge Kanäle angegeben wurden (siehe Kapitel Projektoptionen; Analog Boards 21) und nominieren Offset während der letzten 10 Frames der Aufnahme gelesen werden , wenn entladen.
- In der proprietären Tracking-Software, nominieren einen Multiplikator auf die Motion-Capture-Frequenz eine ausreichende analoge Abtastfrequenz zu gewährleisten. Verwenden Sie einen Multiplikator von 17, eine individuelle Kraftplattform Abtastfrequenz von 1.020 Hz ergibt.
- Implementieren Sie die dynamische Stab Kalibrierverfahren:
- Positionieren der L-förmigen Referenzstruktur auf dem Boden in dem Erfassungsvolumen in Vorbereitung für die Kalibrierung von 3D-Raum. Die lange Achse dieser Struktur sollte in der anterioren Richtung weis sein. (Kapitel Stab Kalibrierverfahren 21 sehen).
- In der Kalibrierungseinstellungen Seite im Dialog Projektoptionen, wählen Sie die Kalibrierung "Typ" auf Wand, mit einer 750 mm Länge. Wählen Sie dann Koorgeordnete Systemorientierung mit positiven z-Achse nach oben zeigt und die positive y-Achse als verlängerter Arm (Kapitel Kalibrierung 21 sehen). Klicken Sie auf OK.
- Klicken Sie auf das Kalibrierungssymbol und stellen Sie die beabsichtigte Länge der Kalibrierungs capture bis 60 sek. Legen Sie dann eine Zeitverzögerung von 5 Sekunden und identifizieren die Datei Verzeichnis, in dem die Ergebnisse gespeichert werden. Klicken Sie auf OK Kalibrierung zu beginnen.
Hinweis: Der Stab Prozedur zwei Kalibrationsobjekte verwendet das Messvolumen zu kalibrieren; Dies wird verwendet , um die Auflösung eines großen Motion - Capture - Volumen (Abbildung 3) zu maximieren. Eines ist ein stationäres L-förmige Referenzstruktur mit vier Marker daran befestigt und verwendet, um das globale Koordinatensystem zu definieren. Das andere Objekt ist ein Stab, der aus zwei Markierungen besteht in einem festen Abstand voneinander angeordnet sind. Während der Kalibrierung der x, y, z Orientierungen diese in Bezug auf die x, y, z-Positionen der statischen Markierungen vier Raupenauf der Referenzstruktur; wiederum ermöglicht die proprietäre Software zur Triangulierung, vorherzusagen und die Bahnen der bewegten Markierungen im 3D-Raum zu rekonstruieren. Am Ende dieses Verfahrens wird jede Kamera wird ein Restfehler seiner Genauigkeit zurück. - Bewegen Sie den Kalibrierungsstab innerhalb des Kalibriervolumen durch Drehen und Verschieben des Stab um die beabsichtigte Erfassung Volumen für den angegebenen 60 Sekunden (Kapitel Wand Kalibrierungsmethode 21 sehen).
- Überprüfen Sie die Ergebnisse der Kalibrierung, akzeptieren Kalibrierung mit einzelnen Kamerarestfehler von <1,5 mm, klicken Sie auf OK.
Hinweis: Wenn Sie Kraftmessplatten haben wird es eine Warnung sein, die Sie daran erinnert, wieder die Kraftmessplatte Positionsmess (da es höchstwahrscheinlich mit der neuen Einstellung geändert).

Abbildung 3. L-Form - Referenzstruktur und Wand für die KameraKalibrierung. Der L-förmige Referenzstruktur stationär bleibt und hat 4 Marker daran befestigt. Der Zauberstab hat zwei Markierungen in einem festen Abstand zu ihm angebracht und bewegt wird , in Bezug auf die Referenzstruktur, ein 3-D kalibriert Raumvolumen zu schaffen , die für den vorgesehenen Marker ausreichend genug ist , gesetzt durch. Bitte klicken Sie hier , um die sehen eine größere Version dieser Figur.
{kind=link}
- Entfernen Sie die Kalibrierung von der Aufnahme Lautstärke einstellen. Suchen Sie die Kraft - Plattformen im kalibrierten 3D - Raum mit einem Durchmesser von 9 mm passive retroreflektierende Markierung in jeder der vier Ecken jeder Plattform platzieren ( die Aufmerksamkeit auf die Platzierung ist wichtig, Kapitel Kraft Platte Ort 21 zu sehen). Besorgen Sie sich eine 5 Sekunden Aufnahme und gehen jeden Marker zu identifizieren und jedes Referenzsystem-Plattform (PRS) im 3D-Raum als je proprietäre Software Vorschläge.
- Verpflichten sich eine dynamischefangen die oben genannten Sampling und 3D-Tracking-Parameter (1.6), um zu bestätigen und Sinnes überprüfen nachfolgende Kraftgrößen und Richtungen.
- Richten Sie dynamische Erfassung für 15 Sekunden mit einer 5 Sekunden Verzögerung. Sobald die Klick - Capture beginnen initiiert wird, der Bediener Zeit auf dem Stuhl zu sitzen hat, anhalten, stehen, anhalten und zu Fuß nach vorn mit den Kraft - Plattformen (an dieser Stelle in Kontakt, ist es nicht erforderlich , dass der Bediener retroreflektierend zu haben Marker in situ angebracht).
- Sobald die Erfassung abgeschlossen ist, überprüfen Sie die Richtung und die Größen der Bodenreaktionsvektoren Konfigurationen von Kraft-Plattformen zu gewährleisten korrekt sind. Erwarten Sie nach oben und posterior zur Fahrtrichtung Vektoren zu Fuß Kontakt und eine maximale vertikale Kraft von etwa 1 bis 1,5-fache des Körpergewichts.
- Platz höhenverstellbare Hocker in der Mittellinie des Fangvolumen zwischen Kraft - Plattformen 1 und 2 (Abbildung 2), und schließen Sie einen 300 mm durchmeter Druck Sitzmatte an den externen AD-Wandler.
- Bereiten Sie alle passiven retroreflektierenden anatomischen Marker für die Fixierung von pre einzeln auf einer Seite des Doppel-Klebeband, ca. 15 mm lang (mindestens 60 cm von Doppelklebeband insgesamt pro Fach) und ordnen an einem geeigneten Ort bereit für die Anwendung Anbringung zu unterziehen. Fügen Sie Tracking Marker Cluster und selbstsichernde Verband bereit für die rechtzeitige Thema Anwendung.
Hinweis: Tracking Marker sollten mindestens 3 retroreflektierenden Markierungen umfassen eine nicht-co-linearen Anordnung angeordnet sind , und sind auf Körpersegmente platziert (einige anatomische Marker bei geschätzten gemeinsamen Zentren positioniert als Tracking - Marker verwendet werden , zB 1. und 5. Mittelfußknochen).
2. Gegenstand Vorbereitung
- Erhalten Sie eine schriftliche Einverständniserklärung von Subjekt, das Kriterien Inklusion / Exklusion erfüllt.
- Stellen Sie unterliegen in geeignete Kleidung zu wechseln (Radfahren shorts, anliegend T-Shirt und Sport-BH wie geeignet).
- Stellen Sie dominant unteren Extremität mit dem kicking-a-Ball - Test 22 , wenn das Thema der Lage ist , so sicher zu machen.
- Messen Thema Stehhöhe (m) und Masse (kg); konvertieren Masse Gewicht (N).
- Mit Thema stehend, messen Thema bi-acromial Abstand (m) unter Verwendung von Messsätteln. Lock-Sattelposition zu verwenden Abstand für die Füße Positionierung (siehe 4.5 unten).
- Messen Sie vertikal vom Boden bis zur Knie Abstand (m) auf der Dominante Schenkel (im Stehen); multiplizieren Abstand von 1,2 120% KH Abstand (m) zu berechnen. Passen Sie Stuhl Höhe auf 120% KH. Tabelle 1 fasst 10 gesunden Probanden Eigenschaften einschließlich Kniehöhendaten.

Tabelle 1:. Betreff Merkmale Individuelle Daten und mittlere (± 1 SD) über 10 Probanden gezeigt.
- Bereiten Sie die Hautbereiche für Marker Platzierung. Rasur unerwünschte Körperbehaarung als angemessen und mit Alkohol überschüssigen Schweiß zu entfernen, wischt und / oder Feuchtigkeitscreme zu maximieren Haftung zwischen Markern und der Haut.
- Ertasten, zu identifizieren und retroreflektierende Markierungen auf anatomische Orientierungspunkte der unteren und oberen Extremitäten, Rumpf, Kopf und Beckensegmente mit doppelseitigem Klebeband in Übereinstimmung mit dem gewählten technischen Referenzrahmen 23 (Tabelle 2) gelten. Weiter zum Segmenttrackingmarker mit selbstsichernde Verband beantragen.
Hinweis: Bei Frauen, wenn Schwierigkeit ergibt sich die sternal Kerbe Marker Ortung - Platzmarkierung über der Mitte des Sport-BH Kleidungsstück.

Tabelle 2: Marker-Set Platzierung. Marker (anatomische und Tracking) auf der Grundlage einer zuvor berichtet technischen Referenzrahmen 23 .
- Stellen Sie unterliegen in den Fangvolumen zu gehen und die anatomische Position einnehmen. An dieser Stelle muss der Gegenstand erst bewegen, nachdem statische Erfassung hat aufgrund der inhärenten Probleme durchgeführt wurde an diesem anatomischen Lage des Hüftgelenks Zentrum über der Kleidung zu schätzen.
3. Statische Capture-
- Instruieren Gegenstand stationär in der Mitte des Fangvolumens zu stehen, die anatomischen Standardposition einnimmt, mit allen anatomischen und Trackingmarker in situ.
Eine statische Kalibrierung vorgenommen wird mit anatomischen und Trackingmarker in situ Um Weichgewebe Artefakt zu reduzieren: Hinweis. Die Tracking-Marker werden an die anatomischen Markierungen verwiesen, die die Begrenzung der Annahme negiert, dass die gemeinsame Zentren bewegen sich nicht unter der Haut. Tracking - Marker sind für die nachfolgende dynamische Prüfungen in situ belassen. Dies wird die kalibrierte anatomischen Systeme Technik (CAST) 18 bezeichnet.- Um eine kurze statische Erfassung vorzunehmen, verwenden Sie die oben genannten Sampling und 3D - Tracking - Parameter (1.6) und sicherzustellen , dass alle Marker für die in der Fangvolumen berücksichtigt werden , indem die Gesamtzahl der Marker bestätigt im Unidentified Panel Trajectories aufgeführt wird in 3D - Echtzeit - Modus . Dies sollte mit der Gesamtzahl der Markierungen entsprechen, die der gewählten technischen Bezugsrahmen erfordert. Klicken Sie auf das Symbol Aufnehmen 5 sec Aufnahme abzuschließen. Wiederholen Sie den Vorgang bei Bedarf, wenn Markierungen fehlen.
Hinweis: Siehe Abschnitt 6 für die Verarbeitung von statischen Daten erfassen.
- Um eine kurze statische Erfassung vorzunehmen, verwenden Sie die oben genannten Sampling und 3D - Tracking - Parameter (1.6) und sicherzustellen , dass alle Marker für die in der Fangvolumen berücksichtigt werden , indem die Gesamtzahl der Marker bestätigt im Unidentified Panel Trajectories aufgeführt wird in 3D - Echtzeit - Modus . Dies sollte mit der Gesamtzahl der Markierungen entsprechen, die der gewählten technischen Bezugsrahmen erfordert. Klicken Sie auf das Symbol Aufnehmen 5 sec Aufnahme abzuschließen. Wiederholen Sie den Vorgang bei Bedarf, wenn Markierungen fehlen.
- Verwenden Sie die Positionsdaten aus dem Hüftgelenk-Zentrum Meilenstein auf dem Thema dominanten Seite Beinlänge zu bestimmen (Abstand vom Hüftgelenk-Zentrum (siehe 7.1 und Tabelle 3b unten) bis zum Boden) zur Entfernung Normalisierung (siehe 7.11 unten).
4. Familiarization
- Entfernen Sie alle anatomischen-only-Marker.
- Instruieren Thema zu sitzenauf dem Stuhl mit den Füßen auf einzelnen Kraftplattformen 1 & 2.
- Instruieren Thema zu stehen und dann zu Fuß nach vorn mit dem definierten führende Bein. Stellen Sie die Vorwärts-Rückwärts-Position des Stuhls, bis das Thema konsequent zentralen Kontakt mit Kraftmessplatten 3 und 4 in den ersten 2 Stufen des Gehens macht. Lassen Sie wiederholte Praxis Versuche, bis das Objekt bequem ist.
- Markieren Sie die vordere Beinposition des Stuhls mit Klebeband auf der Bodenoberfläche, um Stuhlposition wieder herzustellen.
- Richten Sie letzte Füße Position (Abbildung 2). Stellen Sie Motiv auf dem Stuhl mit den Füßen auf einzelnen Kraftplattformen 1 und 2. Stellen Sie Schaftposition auf Subjekts dominante Seite 10 ° posterior von der Vertikalen mit einem ausfahrbaren Arm Goniometer zu sitzen. Gehen Sie auf die nicht-dominante Fuß gleich in Zeile einzustellen, und dann die gesperrten Sätteln (siehe 2.5 oben), ordnen Sie die inter Fußbreite an der vorbestimmten bi-acromial Abstand entsprechend zwischen den seitlichen Fuß Grenzen.
- Stellen Sie die Querebene Ausrichtung jedes Fußes, so dass jede mediale Fuß Grenze wird im Einklang mit der Fahrtrichtung platziert.
- Nachdem schließlich die Ausrichtung überprüft, um endgültige Fußstellungen ziehen einen trockenen Board Markierungsstift auf das entnehmbare Kraft Plattformoberfläche verwenden.
- Verwenden Sie die mündliche Anweisung:.. "Wenn man das Licht sehen, kommen vor dir, steh auf und stoppen Psychisch Countdown von 3 auf 1, eine Zahl zu einem Zeitpunkt, dann führt mit nicht-dominanten Bein, zu Fuß in ein bequemen Schritt in Richtung auf den Schalter vor dem Licht und zu stoppen. Count geistig von 3 bis 1, eine Zahl zu einem Zeitpunkt, und dann Hand mit Ihrem Schreiben den Schalter verwenden, um das Licht auszuschalten ".
- Re-iterate auf das Thema, das sie ihre Arme natürlich verwenden können, ermöglichen dann das Thema ausreichende Einarbeitungs Protokoll STSW. Familiarization gibt dem Thema so viel Zeit wie möglich an die Testumgebung zu akklimatisieren gewährleisten sie in der Lage sind, um effizient erreichendie Aufgabe ohne erzwungene Bewegung, die sonst über die ökologische Validität des experimentellen Paradigma treffen könnten.
5. STSW Dynamische Trials
- Mit Motiv auf dem Stuhl bereit für dynamische Versuche sitzen, bestätigen zunächst die Gesamtzahl der Marker aufgelistet in der nicht identifizierten Trajektorien - Panel in 3D - Echtzeit - Modus , und dass sie entsprechen der Gesamtzahl der Marker, die die gewählten technischen Referenzrahmen erfordert. Klicken Sie dann auf das Symbol Aufnehmen 15 sec dynamische Aufnahme abzuschließen.
- Nach 5 sec erfassen, schalten Sie den Bediener Lichtschalter und prüfen, wie das Thema reagiert -, dass sie aus dem Stuhl steigen und wie angewiesen Pause, auf Schritt Plattformen zu zwingen, 3 und 4, und dass sie das Licht stoppen und ausschalten, wie angewiesen innerhalb des Fangperiode.
- Re-stellen Sie den Lichtschalter und prüfen, ob Marker Aussetzer durch Bilanzierung für alle Marker während der Wiedergabe in Zeitlupe von Versuch. Wiederholen Sie, wenn necessary, sonst zum nächsten Versuch fortzusetzen. Gehen Sie auf zu erfassen 5 Versuche von STSW in jedem Fach.
- Im Falle der anatomischen Markierungen immer ungebunden, wieder anzubringen, um vorgegebene Hautzeichen. Wenn Tracking Marker bewegen, erneut an anatomischen Marker und statischen Versuch wiederholen - dann mit den restlichen dynamischen Studien fortzusetzen.
6. Proprietary Tracking Software Post Processing
- In den eigenen Tracking - Software, zu identifizieren und alle Marker aus statischen und dynamischen Prüfungen beschriften und Ernte unerwünschte Erfassung durch Verschieben der Zeit gleitet an den Anfang und das Ende der Aufgabe (Kapitel Manuelle Identifizierung von Trajektorien 21 sehen). Nutzen Sie die "automatische Identifizierung von Markern", auch bekannt als AIM, Funktionalität im proprietären Tracking - Software Kennzeichnung zu unterstützen (siehe Kapitel Erstellen eines AIM Modell 21).
Anmerkung: Die Markierung von Markierungen ist erforderlich, damit die proprietäre und anschließende Biomechanik Auswertesoftwarekonsequent konstruiert und berechnet die relative Bewegungsbahn eines starren Körpers in 3-dimensionalen Raum. Sinnvolle Kennzeichnung verwenden , wie in Tabelle 2 dargestellt. Ziel ist es fachspezifisch, sondern ständig Updates. Mit einem anderen Thema und im Falle eines schlechten AIM, gehen auf AIM durch manuelle Beschriftung zu aktualisieren. Dies gilt auch für den statischen Capture-Verfahren (siehe Abschnitt 3.1.1 oben). - Im Falle der Markierung fallen aus, dass 10 Frames überschreitet, gehen auf , um entweder die fehlende Erfahrung im Bereich der nicht identifizierten Trajektorien Tafel zu finden, oder manuell spaltFüllung mit der Polynom - Interpolation - Funktion durch die proprietäre Software zur Verfügung gestellt (siehe Kapitel Gap Trajectories Füllen 21) .
Hinweis: In einigen Fällen Marker-Trajektorien sind teilweise abwesend und Lückenfüllung ist ein Mechanismus, durch fehlende Daten mathematisch geschätzt auf der gemessenen Trajektorie basieren können vor und nach den fehlenden Daten. - Format einin c3d Format, für die Nachbearbeitung in der Biomechanik - Analyse - Software d alle statischen und dynamischen Prüfungen, exportieren.
Hinweis: Vor der Export, schließen alle nicht identifizierten und leeren Marker-Trajektorien, die Angabe de facto Kennzeichnung und benennen die letzten 10 Frames für Null-Kraft-Ausgangswerte für jede Kraftplatte.
7. Biomechanik-Analyse-Software Post Processing
- Bauen Sie statischen 13-Segment - Modell 23 (Füße, Schenkel, Oberschenkel, Becken, Rumpf, Oberarme, Unterarme und Kopf ( man beachte , keine Hände)).
. Hinweis: Der Prozess der Modellbildung von grundlegender Bedeutung ist die verknüpften Segmente auf der Basis der statischen Mess Versuch und proprietäre Software - Anweisungen bei der Definition wurden 24 in diesem Protokoll verwendete die anatomischen Koordinatensysteme für jedes Körpersegment (Tabelle 3a) und Joint - Center - Standorte (Tabelle 3b ) sind vor allem auf Ren et al basiert. 23 mit Anpassungen funktionellen h zu vermeidenip und Glenohumeralgelenk Zentrum Schätzung. Gold-Standards für alle gemeinsamen Center-Standorte bleiben Bildgebungsverfahren wie Magnetresonanztomographie (MRT), die in den meisten Fällen unrealistisch sind. Funktionelle Gelenkzentrum Schätzungen wurden verwendet; jedoch besteht weiterhin das Risiko , dass Patienten mit einer Pathologie nicht in der Lage sein, das Gelenk in den erforderlichen Ebenen 25 bewegen. Daher wird für die Beckenregressionsgleichungen zB 26 Davis werden oft verwendet. Hier wurde die CODA pelvis 27 eingesetzt und basiert auf der Arbeit von Bell et al. 28, und die Glenohumeralgelenk Zentren wurden geschätzt nach Eames et al. 29.

Tabelle 3a: Anatomische Koordinatensystem für Whole - Body - Modell.

Tabelle 3b: Gemeinsame Zentrum Definitionen für Whole - Body - Modell.
- Importieren Sie die dynamischen Dateien und weisen Sie das Modell für jeden. Bestätigen Sie die Genauigkeit der Modellbildung von normalen visuellen Konfiguration von Segmenten zu überprüfen. Im Falle der Ungenauigkeit wird der Bediener empfohlen zurück zu den proprietären Tracking-Software-Dateien zu gehen und Sensor-Bildverfolgungsprofile zu überprüfen und gegebenenfalls korrigieren.
- Tiefpaßfilter kinematischen und kinetischen Daten mit einem 4 - ten Ordnung Butterworth- jeweils bei 6 Hz und 25 Hz mit Grenzfrequenz filtern.
- Durchschnittliche Filter Licht und Druck-mat analoge Signale über einen 25-Frame-Fenster.
- Erstellen Sie Kräftestruktur für Kraft - Plattformen 1, 2, 3 und 4. Mit Ecke koordiniert eine Ebene flächige, rechteckige Struktur umfasst alle vier Kraftmessplatten (Abbildung 4) zu erstellen.
Hinweis: Eine Kraft Struktur erforderlich ist , 30, um die Netto-COP Berechnungen können über die vier Kraftmessplatten hergestellt werden. i> - Berechnen der Netto COP Koordinatensignale (x und y) im Labor - Koordinatensystem (LCS) von der Kraft - Struktur.
Hinweis: Die Software führt dies durch die Gleichungen 2a-g unten.- Verwenden Sie x und y - Signale aus den Gleichungen 2f und 2g für die Netto - COP Position innerhalb der LCS.
(2a) Netto mediolateraler Kraft 
(2b) Netto anterior-posteriore Kraft 
(2c) Netto-Vertikalkraft 
(2d) Net Plattform Moment über x - Achse 
(2e) Net Plattform Moment um die y - Achsen 8 "src =" / files / ftp_upload / 54323 / 54323eq8.jpg "/>
(2f) x - Koordinate der Netto - Kraftangriffspunkt (COP x) 
(2 g) y - Koordinate der Netto - Kraftangriffspunkt (COP y) 

Abbildung 4. Kraftaufbau. Beispiel eines rechteckigen Kräftestruktur umfasst vier Kraftmessplatten in einem rechten blei Glied Orientierung. Einzelheiten der lokalen COP Anwendung und Dimensionen in Bezug auf eine Labor-Koordinatensystem (LCS) für Kraftplattform 1 als Beispiel gezeigt. Die x, y, z - Position der Plattform - Referenzsystem (PRS) an den L versetzt CS wobei X 1 und Y 1 stellen die mediolaterale und anteroposterior Entfernungen von PRS, respectively. Um die einzelnen Plattform Moment um die x - Achse zu berechnen, die vertikale GRF wird durch die Summe des lokalen y COP multipliziert Koordinate und die neuen PRS-LCS - Offset y - Koordinate (Y 1 + y 1). (X 1 + x 1) - der Moment um die y - Koordinate -Achse wird in ähnlicher Weise durch Multiplizieren der vertikalen GRF durch die negative Summe der lokalen x COP - Koordinate und die neue PRS-LCS - Offset x - Koordinate berechnet. Die Gesamtkraftmoment über die globale Kräftestruktur ist auf die Summe aller von den Kraftmomente, dividiert durch die Summe der einzelnen vertikalen Kräfte gleich. Net COP X und Y - Koordinaten werden somit für die Kraftstruktur innerhalb der LCS (Gleichungen 2a-g) hergestellt.large.jpg "target =" _ blank "> Bitte hier klicken, um eine größere Version dieser Figur zu sehen.
- Mit maßgeschneiderten Pipeline Befehlen erstellen Sie wichtige Bewegungsereignisse innerhalb STSW, speziell Sitz-off, aufrecht, Gang Einleitung Beginn, erste Zehe-off 1 und 1. und 2. erste Kontakte (Tabelle 4).

. Tabelle 4: Bewegung Event Definitionen GI - Gang Einleitung; COP - Center-of-Druck; HO1 - erste Ferse-off; TO1 - 1. toe-off, IC1 - 1. Erstkontakt.
- Mit maßgeschneiderten Pipeline Befehle berechnen die COP-BCOM Abstand (L) durch die Gleichung 3 bei jeder Bewegung Ereignis Anwendung, wobei t i ein bestimmtes Ereignis darstellt.

(3) - Mit maßgeschneiderten Pipeline - Befehle, die Berechnung der maximalen COP-BCOM Abstand (L max) durch Anwendung der Gleichung 4 zwischen zwei Ereignissen (t o → t i).

(4)
Wo: t 0 und t i darstellen Bewegungsbeginn und die letzte Zeitinstanz von Interesse sind, (x COP (t i)) i die x - Koordinate der COP zum Zeitpunkt t (x BCOM (t i)) ist die Koordinate i der BCOM zum Zeitpunkt t, und (y COP (t i)) und (y BCOM (t i)) sind die entsprechenden Werte für die y - Koordinaten 31. - Extract abhängige Variablen von Interesse an Bewegungsereignisse; COP-BCOM Strecken bei Sitz-off und frste toe-off (TO1) Veranstaltungen und maximale COP-BCOM Abständen während der 1 Schritt Phase st (zwischen TO1 und erste Anfangskontakt; IC1) und der 2. Stufe Phase (zwischen IC1 und IC2) Pipeline Befehle angepasst werden.
- Normalisieren intraindividuelle COP-BCOM Entfernungen als Anteil an der dominanten Beinlänge des Subjekts (siehe 3.2 oben).
- Exportieren von Daten für die statistische Analyse der Kopie mit Funktionalität zu kopieren oder von Dateien in anderen verfügbaren nativen Formaten exportieren.
8. Lab spezifische Normative Wertberechnungen
- Berechnen Sie mittlere (± 1 SD) intra- und interindividuelle Werte für beide tatsächlichen COP-BCOM Entfernungen und normierten Werte als Anteile der dominanten unteren Extremitäten Länge der Probanden.
- Berechnen Variationskoeffizienten (COV) für die mittlere interindividuelle Daten.
- Berechnen intraindividuelle Variation pro Veranstaltung mit Zwei-Wege-Mischeffekte Modell intra-Klasse Korrelationskoeffizienten (ICC 3,1), und der Messfehler 32.
Ergebnisse
Alle Probanden stieg mit den Füßen auf den beiden Kraftplattformen platziert, mit ihren nicht-dominanten Extremität führen, wie angewiesen. Normale Gangart wurde beobachtet, mit Themen sauber auf den anderen Plattformen und optische 3D-basierte Bewegungsanalyse erfolgreich verfolgt Ganzkörperbewegung während 5 wiederholt zielorientierte STSW Aufgaben stieg von 120% KH treten. Gleichzeitige COP und BCOM mediolateral (ML) und von vorne nach hinten (AP) Verschiebungen zwischen Sitz-of...
Diskussion
Die Sit-to-Stand-und-Fuß (STSW) Protokoll hier definiert sind, können bei komplexen Übergangsbewegung bei gesunden Personen oder Patientengruppen zu testen dynamische Haltungskontrolle verwendet werden. Das Protokoll enthält Einschränkungen, die ausgelegt sind, Patienten mit Pathologie die Teilnahme zu ermöglichen, und die Einbeziehung von Abschalten der Licht bedeutet es ökologisch gültig ist und zielorientiert. Wie es zuvor , dass Blei-Glied gezeigt worden ist , und von einem hohen (120% KH) Sitz steigt grunds...
Offenlegungen
The authors have no competing financial interests to disclose.
Danksagungen
Die Autoren möchten sich Tony Christopher, Lindsey Majoran am Kings College London und Bill Anderson in London South Bank University für ihre praktische Unterstützung danken. Vielen Dank auch an Eleanor Jones am Kings College London für ihre Hilfe die Daten für dieses Projekt zu sammeln.
Materialien
| Name | Company | Catalog Number | Comments |
| Motion Tracking Cameras | Qualysis (Qualysis AB Gothenburg, Sweden) | Oqus 300+ | n= 8 |
| Qualysis Track Manager (QTM) | Qualysis (Qualysis AB Gothenburg, Sweden) | QTM 2.9 Build No: 1697 | Proprietary tracking software |
| Force Platform Amplifier | Kistler Instruments, Hook, UK | 5233A | n= 4 |
| Force Platform | Kistler Instruments, Hook, UK | 9281E | n= 4 |
| AD Converter | Qualysis (Qualysis AB Gothenburg, Sweden) | 230599 | |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B01 | n= 2 |
| Light-Weight Wooden Walkway Section | Kistler Instruments, Hook, UK | Type 9401B02 | n= 4 |
| 4 Point "L-Shaped" Calibration Frame | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| "T-Shaped" Wand | Qualysis (Qualysis AB Gothenburg, Sweden) | ||
| 12 mm Diameter Passive Retro reflective Marker | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160181 | Flat Base |
| Double Adhesive Tape | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160188 | For fixing markers to skin |
| Height-Adjustable Stool | Ikea, Sweden | Svenerik | Height 43 - 58 cm with ~ 10cm customized height extension option at each leg |
| Circular (Disc) Pressure Floor Pad | Arun Electronics Ltd, Sussex, UK | PM10 | 305 mm Diameter, 3 mm thickness, 2 wire |
| Lower Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160145 | 2 Marker clusters, lower body with 8 markers (n= 2) |
| Upper Limb Tracking Marker Clusters | Qualysis (Qualysis AB Gothenburg, Sweden) | Cat No: 160146 | 2 Marker clusters, lower body with 6 markers (n= 2) |
| Self-Securing Bandage | Fabrifoam, PA, USA | 3'' x 5' | |
| Cycling Skull Cap | Dhb | Windslam | |
| Digital Column Scale | Seca | 763 Digital Medical Scale w/ Stadiometer | |
| Measuring Caliper | Grip-On | Grip Jumbo Aluminum Caliper - Model no. 59070 | 24 in. Jaw |
| Extendable Arm Goniometer | Lafayette Instrument | Model 01135 | Gollehon |
| Light Switch | Custom made | ||
| Visual3D Biomechanics Analysis Software | C-Motion Inc., Germantown, MD, USA | Version 4.87 |
Referenzen
- Duncan, P. W., Goldstein, L. B., Matchar, D., Divine, G. W., Feussner, J. Measurement of motor recovery after stroke. Outcome assessment and sample size requirements. Stroke. 23 (8), 1084-1089 (1992).
- Smith, M. T., Baer, G. D. Achievement of simple mobility milestones after stroke. Arch Phys Med Rehabil. 80 (4), 442-447 (1999).
- Langhorne, P., Bernhardt, J., Kwakkel, G. Stroke rehabilitation. Lancet. 377 (9778), 1693-1702 (2011).
- Veerbeek, J. M., et al. What is the evidence for physical therapy poststroke? A systematic review and meta-analysis. PLoS One. 9 (2), e87987 (2014).
- Magnan, A., McFadyen, B., St-Vincent, G. Modification of the sit-to-stand task with the addition of gait initiation. Gait Posture. 4 (3), 232-241 (1996).
- Buckley, T. A., Pitsikoulis, C., Hass, C. J. Dynamic postural stability during sit-to-walk transitions in Parkinson disease patients. Mov Disord. 23 (9), 1274-1280 (2008).
- Frykberg, G. E., Aberg, A. C., Halvorsen, K., Borg, J., Hirschfeld, H. Temporal coordination of the sit-to-walk task in subjects with stroke and in controls. Arch Phys Med Rehabil. 90 (6), 1009-1017 (2009).
- Dehail, P., et al. Kinematic and electromyographic analysis of rising from a chair during a "Sit-to-Walk" task in elderly subjects: role of strength. Clin Biomech (Bristol, Avon). 22 (10), 1096-1103 (2007).
- Buckley, T., Pitsikoulis, C., Barthelemy, E., Hass, C. J. Age impairs sit-to-walk motor performance. J Biomech. 42 (14), 2318-2322 (2009).
- Roy, G., et al. The effect of foot position and chair height on the asymmetry of vertical forces during sit-to-stand and stand-to-sit tasks in individuals with hemiparesis. Clin Biomech (Bristol, Avon). 21 (6), 585-593 (2006).
- Kubinski, S. N., McQueen, C. A., Sittloh, K. A., Dean, J. C. Walking with wider steps increases stance phase gluteus medius activity. Gait Posture. 41 (1), 130-135 (2015).
- Jian, Y., Winter, D. A., Ishac, M. G., Gilchrist, L. Trajectory of the body COG and COP during initiation and termination of gait. Gait Posture. 1 (1), 9-22 (1993).
- Winter, D. A. Human balance and posture control during standing and walking. Gait Posture. 3 (4), 193-214 (1995).
- Cavanagh, P. R. A technique for averaging center of pressure paths from a force platform. J Biomech. 11 (10-12), 487-491 (1978).
- Halliday, S. E., Winter, D. A., Frank, J. S., Patla, A. E., Prince, F. The initiation of gait in young, elderly, and Parkinson's disease subjects. Gait Posture. 8 (1), 8-14 (1998).
- Hass, C. J., Waddell, D. E., Fleming, R. P., Juncos, J. L., Gregor, R. J. Gait initiation and dynamic balance control in Parkinson's disease. Arch Phys Med Rehabil. 86 (11), 2172-2176 (2005).
- Winter, D. A., Patla, A. E., Ishac, M., Gage, W. H. Motor mechanisms of balance during quiet standing. J Electromyogr Kinesiol. 13 (1), 49-56 (2003).
- Cappozzo, A., Catani, F., Croce, U. D., Leardini, A. Position and orientation in space of bones during movement: anatomical frame definition and determination. Clin Biomech (Bristol, Avon). 10 (4), 171-178 (1995).
- Dempster, W. T., Gabel, W. C., Felts, W. J. The anthropometry of the manual work space for the seated subject. Am J Phys Anthropol. 17 (4), 289-317 (1959).
- Jones, G. D., James, D. C., Thacker, M., Jones, E. J., Green, D. A. Sit-to-Walk and Sit-to-Stand-and-Walk Task Dynamics are Maintained During Rising at an Elevated Seat-Height Independent of Lead-Limb in Healthy Individuals. Gait Posture. 48, 226-229 (2016).
- Qualysis AB. . Qualysis Track Manager User Manual. , (2011).
- Hoffman, M., Schrader, J., Applegate, T., Koceja, D. Unilateral postural control of the functionally dominant and nondominant extremities of healthy subjects. J Athl Train. 33 (4), 319-322 (1998).
- Ren, L., Jones, R. K., Howard, D. Whole body inverse dynamics over a complete gait cycle based only on measured kinematics. J Biomech. 41 (12), 2750-2759 (2008).
- C-Motion Wiki Documentation. . Tutorial: Building a Model. , (2013).
- Kainz, H., Carty, C. P., Modenese, L., Boyd, R. N., Lloyd, D. G. Estimation of the hip joint centre in human motion analysis: a systematic review. Clin Biomech (Bristol, Avon). 30 (4), 319-329 (2015).
- Harrington, M. E., Zavatsky, A. B., Lawson, S. E., Yuan, Z., Theologis, T. N. Prediction of the hip joint centre in adults, children, and patients with cerebral palsy based on magnetic resonance imaging. J Biomech. 40 (3), 595-602 (2007).
- C-Motion Wiki Documentation. . Coda Pelvis. , (2015).
- Bell, A. L., Brand, R. A., Pedersen, D. R. Prediction of hip joint centre location from external landmarks. Human movement science. 8 (1), 3-16 (1989).
- Eames, M. H. A., Cosgrove, A., Baker, R. Comparing methods of estimating the total body centre of mass in three-dimensions in normal and pathological gaits. Human movement science. 18 (5), 637-646 (1999).
- C-Motion Wiki Documentation. . Force Structures. , (2015).
- Martin, M., et al. Gait initiation in community-dwelling adults with Parkinson disease: comparison with older and younger adults without the disease. Phys Ther. 82 (6), 566-577 (2002).
- Bland, J. M., Altman, D. G. Measurement error. BMJ. 313 (7059), (1996).
- Hof, A. L. Scaling gait data to body size. Gait Posture. 4 (3), 222-223 (1996).
- Holden, J. P., Selbie, W. S., Stanhope, S. J. A proposed test to support the clinical movement analysis laboratory accreditation process. Gait Posture. 17 (3), 205-213 (2003).
- Baker, R. Gait analysis methods in rehabilitation. J Neuroeng Rehabil. 3, (2006).
- Gregory, C. M., Embry, A., Perry, L., Bowden, M. G. Quantifying human movement across the continuum of care: From lab to clinic to community. J Neurosci Methods. 231, 18-21 (2014).
- Pai, Y. C., Rogers, M. W. Segmental contributions to total body momentum in sit-to-stand. Medicine and Science in Sports and Exercise. 23 (2), 225-230 (1991).
- Hughes, M. A., Weiner, D. K., Schenkman, M. L., Long, R. M., Studenski, S. A. Chair rise strategies in the elderly. Clin Biomech (Bristol, Avon). 9 (3), 187-192 (1994).
- Medeiros, D. L., Conceição, J. S., Graciosa, M. D., Koch, D. B., Santos, M. J., Ries, L. G. The influence of seat heights and foot placement positions on postural control in children with cerebral palsy during a sit-to-stand task. Res Dev Disabil. 43-44, 1-10 (2015).
- Breniere, Y., Do, M. C. When and how does steady state gait movement induced from upright posture begin?. J Biomech. 19 (12), 1035-1040 (1986).
- Weerdesteyn, V., de Niet, M., van Duijnhoven, H. J., Geurts, A. C. Falls in individuals with stroke. J Rehabil Res Dev. 45 (8), 1195-1213 (2008).
Nachdrucke und Genehmigungen
Genehmigung beantragen, um den Text oder die Abbildungen dieses JoVE-Artikels zu verwenden
Genehmigung beantragenThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Alle Rechte vorbehalten