
Method Article
晶圆级试验站上SiN集成光学相控阵列的特性
摘要
在这里,我们描述了包含光学相控阵列的SiN集成光子电路的运行情况。这些电路用于在近红外发射低发散激光束,并引导它们以两维。
摘要
光学相控阵列 (OPA) 可产生低发散激光束,可用于电子控制发射角度,而无需移动机械部件。该技术特别适用于光束转向应用。在这里,我们专注于集成到SiN光子电路的OPA,用于近红外波长。提出了这种电路的表征方法,允许对集成OP的输出光束进行塑造和引导。此外,使用晶圆级表征设置,多个器件可以轻松地在晶圆上的多个模具上进行测试。通过这种方式,可以研究制造变化,并识别高性能设备。显示了 OPA 光束的典型图像,包括具有和没有均匀波导长度且通道数量不同的 OPA 发射的光束。此外,还介绍了相位优化过程中输出光束的演变和光束转向的两维。最后,对相同器件的光束离散变化进行了研究,研究其在晶圆上的位置。
引言
光学相控阵列(OPAs)由于能够非机械地塑造和引导光束,因此具有优势,这在广泛的技术应用中非常有用,如光探测和测距(LIDAR)、自由空间通信和全息显示1。OPA 在光子电路中的集成特别令人感兴趣,因为它为其制造提供了低成本的解决方案,物理占用空间很小。集成的OPA已经成功地证明了使用许多不同的材料系统,包括InP,AlGaA和硅22,3,4。3,4在这些系统中,硅光子可能是最方便的,由于其高折射率对比度和与CMOS5的兼容性。事实上,OPA电路已经在绝缘子上的硅平台,6、7、8、9、107,8中得到了广泛的证明;9,106然而,这些电路的应用受到硅波长透明度窗口和非线性损耗高的限制,从而限制了可用输出光功率。我们专注于集成在SiN中的OPA,这种材料在CMOS能力和尺寸11,12,12方面与硅具有相似的特性。然而,与硅相比,SiN 有望适用于更广泛的应用,因为透明度窗口更宽,至少达 500 nm,而且由于非线性损耗相对较低,因此光学功率可能很高。
OPA集成的主体最近被证明使用SiN8,8,13,14。,14在这里,我们将扩展这些主体,以演示一种为二维光束转向进行特征化和操作集成 OPA 的方法。与之前依靠波长6调谐的两维光束转向演示相比,我们的电路可以在单个波长下运行。我们首先简要概述了 OPA 背后的操作原则。然后介绍本工作中使用的电路。最后,对OPA输出光束的表征方法进行了描述和描述。
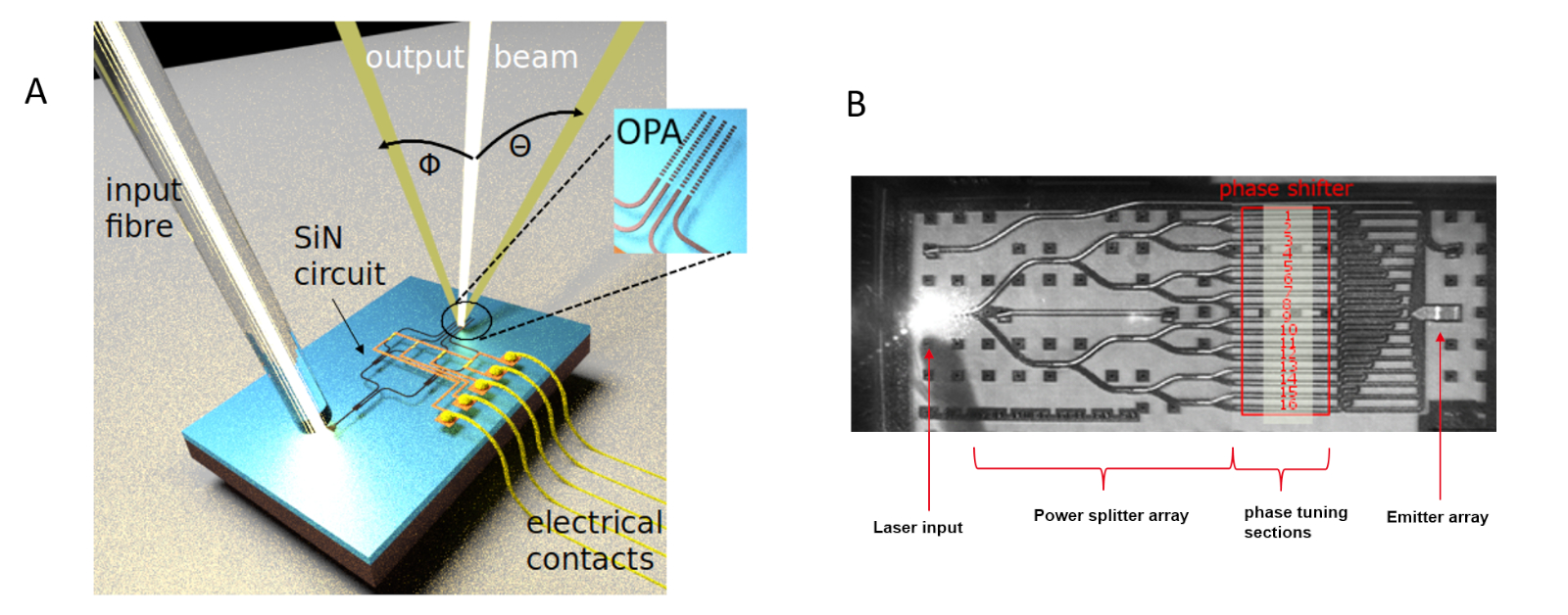
OPA 由一系列间隔紧密的发射器组成,这些发射器可以单独处理以控制光相。如果发射体阵列之间存在线性相位关系,则远场中的干涉模式会产生几个明显分离的最大值-类似于多狭缝干扰原理。通过控制相位差的大小,可以调整最大位置,从而进行光束转向。在集成的OPA中,发射器由间隔紧密的衍射光栅组成,其中光线被散射并发射出芯片平面。图 1A,B显示了集成 OPA 设备的示意图。光通过光纤耦合到芯片中,然后分为多个通道,每个通道包含集成的相位移位器。在光电路的另一端,波导以光栅结束并结合形成OPA。产生的输出光束由多个干涉最大值组成,其中最亮的光束称为基叶,是光束转向应用中最常用的。基本叶的发射方向由芯片平面正交投影的两个同形角定义,分别为α和α,垂直和平行于光栅的方向。在本文档中,*和*将分别称为"垂直"和"平行"发射角度。垂直角度 = 由 OPA 通道之间的相位差确定,平行角度 * 取决于输出光栅的周期。
我们的集成电路采用Si3N4波导,横截面为600 x 300 nm2,该设计针对波长为905nm的基本横向电极化模式进行了优化。波导下方是硅晶片顶部的 2.5 μm SiO2缓冲层。热相移器由 10(100) nm 厚的 Ti(TiN) 层制成,用于形成 500 μm 长和 2 μm 宽电阻线。在我们的电路中,需要 90 mW 的功率来实现 +的相移。OPA 输出光栅由 750 个完全蚀刻周期组成,标称填充系数为 0.5,光栅周期介于 670 nm 和 700 nm 之间。有关平台设计和制造的更多信息,在 Tyler 等人15、,16中提供。
在这项工作中,有两种不同类型的电路被定性,一种是无相位移位功能的无源电路,另一种是更复杂的电路,旨在执行两维的光束转向。图2显示了二维光束转向电路。图2A包含电路原理图,图2B显示了制造设备的显微镜图像。指示灯进入输入光栅处的电路。然后,它到达交换网络,在那里可以有选择地路由到四个子电路之一。每个子电路使用多模干扰器件 (MMI) 将光分成四个通道。通道各包含一个热相移器,并在电路末端形成 OPA。源自四个子电路的四个 OPA 组成 670 nm 和 700 nm 之间的不同光栅周期。这些周期对应于与光栅轴平行的相位角,在 7° 和 10° 之间。在泰勒等人16中可以找到关于电路的更详细的描述。
呈现的表征设置基于一个自动探测站,能够在整个晶圆上的许多电路上执行一系列测量。这样,就可以研究相对于晶圆位置的性能变化,并选择具有最佳性能的设备。然而,由于晶圆上方的可用空间相对较小,探测器站的使用意味着OPA表征方案的一些物理限制。光学相控阵列的特性要求成像远领域的OPA输出,这可以通过多种方式进行。例如,傅立叶成像系统6中可以使用一系列镜头,或者在兰伯斯表面上形成的远场图像可以在反射或传输中查看。对于我们的系统,我们选择了我们认为最简单、最紧凑的解决方案,即放置一个 35 mm x 28 mm 的大表面 CMOS 传感器,而没有将镜头放置在晶圆表面上方约 50 mm 上。尽管这种大型CCD传感器的成本增加了,但该解决方案允许在不使用镜头的情况下有足够的视野。
研究方案
1. 准备工作
- 准备以下实验设置(图4)。
- 使用计算机。
- 使用连续波光纤耦合激光源。根据电路损耗,1 mW 功率就足够了。在提供的表征设置中,激光源的波长为 905 nm。
- 使用适合激光波长的偏振控制器。
- 使用分片输入光纤将光耦合到光电路的输入光栅耦合器中。
- 使用电动探头将电子控制板连接到光学电路的电气触点。
- 需要使用能够控制二维光束转向电路的 20 相位调制器的系统。在介绍的表征设置中,该系统是一个由Arduino控制的定制电子板,能够在光电路的相移器上单独应用0至200 mW的电力。如图 3所示的电路示意图。对于每个通道,该电路包含一个 DAC(数字到模拟转换器),该电压将数字命令电压转换为控制大功率晶体管门的模拟电压。加热器连接到大功率电流源。因此,通过控制闸门张力,可以调节加热器中的电流。
- 使用裸图像传感器对光学输出的远场进行成像。在显示的特性设置中,摄像机是一个 35 mm CCD 传感器。
- 使用光学显微镜对芯片进行成像,以便进行对准。
- 使用 3 轴平移阶段并安装以安装 200 mm 晶圆。在介绍的表征设置中,该阶段是硅光子的可重构探头系统。
- 设备装配
- 根据图 4组装设备并安装晶圆。晶圆和传感器之间的距离需要选择足够小,以确保输出光束的高分辨率图像,但足够大,以容纳至少两个干涉最大值,以便能够找到传感器像素和输出角度之间的关系,如协议第 4 节所述。
- 确保传感器和晶圆是平行的;否则,可能会伪造像素/输出角度计算的计算。在提供的表征设置中,将晶圆传感器距离设置为 5 厘米。如果使用双传感器配置(如此处所示),请确保可轻松拆下裸传感器以进入光学显微镜,以便为光纤对齐目的对近场进行成像。
- 确保电气探头、摄像机和光纤彼此接触。将所需元素连接到计算机。在提供的安装中,探站、CCD 传感器和相位控制的电路通过计算机和 Python 程序驱动,以便自动执行测量过程。
2. 光学耦合
- 光纤对齐
- 使用显微镜,首先小心地降低光纤,直到接触晶圆表面(远离输入光栅耦合器以避免损坏),然后向上移动约 20 μm。
- 完成此操作后,最大化输出光栅处的光强度。为此,开始扫描 OPA 输入光栅耦合器上的光纤位置。如果连接到显微镜的摄像机对激光波长(如果不使用裸图像传感器)响应,并且光纤和光栅耦合器对齐良好,则 OPA 输出光栅处的光线应可见于图像上。如图5A中可以看到一个示例。
- 当从 OPA 天线看到光线时,调整极化以最大化输出光栅处的光强度。请务必避免输入光纤的任何移动或振动
- OPA 输出成像
- 切换到远场成像传感器并改善图像质量:调整传感器的曝光时间和激光功率,使 OPA 输出在相机上清晰可见,并且光束不会使传感器饱和。传感器记录的示例图像如图5B所示。
- 如有必要,盖住设置,以便背景灯不会干扰来自 OPA 光束的图像。通常,背景光越弱,可以设置的激光功率越低。
- 通过在反射和相机之间放置高反射板来阻止反射。有时,来自晶圆表面的反射到达传感器区域并污染 OPA 输出的图像(反射可能发生在输入光栅处)。
- 重新重新调整输入灯的极化以获得清晰的图像。
3. 光束优化和转向
注:本节介绍图 2所示的电路的运行情况,以及如何使用它执行两维的光束转向。
- 准备
- 将相位控制的电路连接到多通道电探头。
- 使用显微镜将电探头的针脚连接到光学电路的金属接触垫。
- 重新优化输入光纤的位置。
- 切换到远场传感器并成像输出。
- 使用交换网络选择平行发射角度*
- 研究开关网络的环振子,以控制在+中的发射角度。为此,观察输出的远场图像,同时改变在环重振器处施加到相移器的电压。当对每个共稳器施加正确的电压时,传感器上的不同区域将被照亮,对应于特定的 μ 值,如图6B所示。
- 查找环处于无共振和振振的电压。为此,可以使用自动脚本扫描共稳器电压并记录传感器上不同 + 区域的强度。使用找到的电压访问各种子电路,并将输出光束转向 +。
- 通过优化 OPA 相位选择正交发射角度 *
- 优化 OPA 相位,以在 + 中塑造和引导输出光束。为此,选择应使用聚焦输出光束照明的小像素区域(对应于所需的 ±角度)。
- 通过运行以下优化例程,最大化所选区域内的亮度。
- 以较小的增量移动其中一个 OPA 通道的相位。每次移位后,记录所选区域的像素区域、i i和外部 io的亮度积分。计算比率 R =i i / Io。在 0 和 2° 之间的全相移位循环后,应用具有最高记录的亮度比 R 的相移。
- 在下一个 OPA 通道上重复此阶段优化过程。可以使用不同的优化算法,例如爬山。
- 通过优化相位来重复优化过程,直到优化过程饱和且聚焦输出光束可见。优化过程中拍摄的输出光束的示例图像如图6A所示。经过 16 轮优化后,输出光束聚焦光束可见。
注: 如果存在一些额外的意外峰值,这可能是在优化过程中与电路的时不稳定耦合的结果。这可能是由于输入光纤的移动和/或不稳定的极化状态。
- 为了将输出光束引导到不同的 +角度,请选择新的像素区域并重复优化过程。
4. 光束离散测量和图像分析
- 图像采集
- 优化输入光纤的位置。记录远场中输出的图像。确保至少可以看到两个明显的干扰最大值。
- 使用校准系统,移动晶圆,以便将下一个设备与输入光纤对齐。通过最大化摄像机记录的输出强度,执行精细对齐。记录输出图像。
- 重复上述步骤,直到所有感兴趣的设备都具有特征。如果所选光电路具有 OPA 通道的相位调整功能,则在记录图像之前执行相位优化例程。
- 图像分析
- 检查记录的图像中是否出现由有缺陷的像素(如死像素或热像素)产生的虚假数据点。擦除这些数据点或用典型值替换值。
- 将 CCD 像素与 OPA 输出角度 * 关联,如下所示。
- 使用 [ ] = sin-1(μ/d) * 计算干涉最大值之间的角度距离 * , 其中 α 是波长,d 是 OPA 光栅之间的横向间距。将两个高斯曲线拟合两个干涉最大值,并确定两个中心(P1和 P2)的位置。由于两个中心(N = P2 - P1)之间的距离(以像素为单位)应与 *相对应应,因此我们获得像素和角度 c + μ/N μ/像素之间的转换因子 c,可用于获取像素之间的相对角度关系。
- 通过精确测量晶圆表面和传感器之间的距离以及像素大小(此处使用的传感器为 5.5×5.5μm),获得转换系数 c。
- 估计其中一个CCD像素的绝对输出角度(以±和+为单位)。根据模拟将光束中心设置为 * 到预期发射角度。为了选择 ±中的绝对值,通过调整 OPA 相位以 +优化多个角度的光束,并记录每个角度的主叶强度。根据 OPA 理论,在 ± ± 0° 下发射时,主叶的强度(侧叶的强度最小化)。因此,将光束中心中的最大记录光束强度的像素设置为 ± = 0Ω。使用此像素和转换系数将绝对角度分配给图像的所有像素。
- 对于相对于垂直轴有显著倾斜的输出光束,如果必须非常精确地测量光束发散和位置,则倾斜摄像机以完全垂直于输出光束。否则,还可以根据输出光束和摄像机平面之间的角度计算传感器上光束的投影,从而对测量的光束尺寸应用校正系数。
- 光束发散的计算
- 沿 ± 和 + 提取穿过基本光束中心的横截面。
- 将两条高斯曲线拟合到横截面,并提取全宽半最大值作为光束发散 =div和 _div的度量。
- 计算预期光束宽度 =div = */Nd [],其中 α 是波长,d OPA 光栅之间的横向距离。
- 通过执行输出光栅的 FDTD 模拟来估计光束发散 =div。
- 自动测试
- 如果表征台(如此处介绍的)可以执行自动测量,则执行一些附加步骤。首先,从电路布局中获取芯片尺寸和测量结构的坐标。然后,将这些值输入到工作台控制软件中。因此,一旦输入光纤在第一个测试结构上对齐(如第 2.1 节所述),工作台可以通过晶圆的转换自动从一个结构切换到另一个结构。
结果
在本节中,显示了 OPA 光束的多个操作图像。其中包括光束的近场和远场的图像、相位优化前后的 OPA 输出光束以及具有不同数量 OPA 通道的光束。
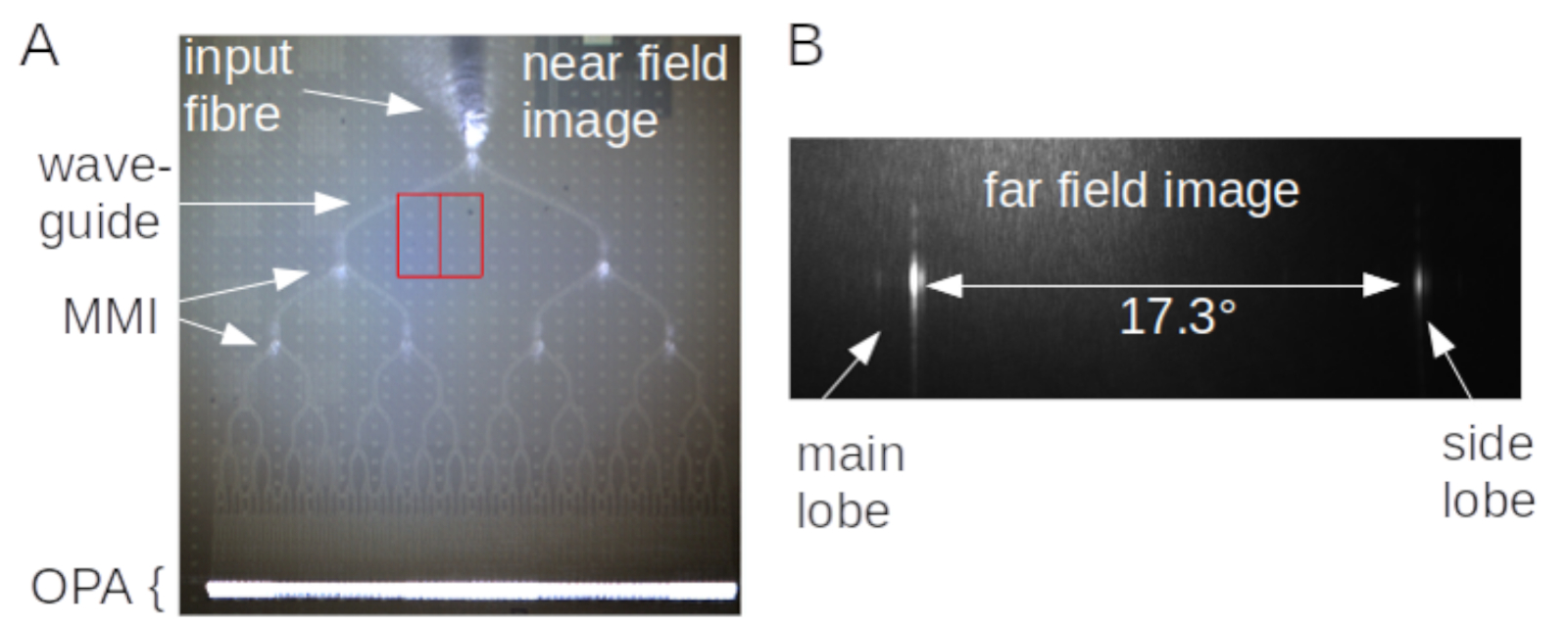
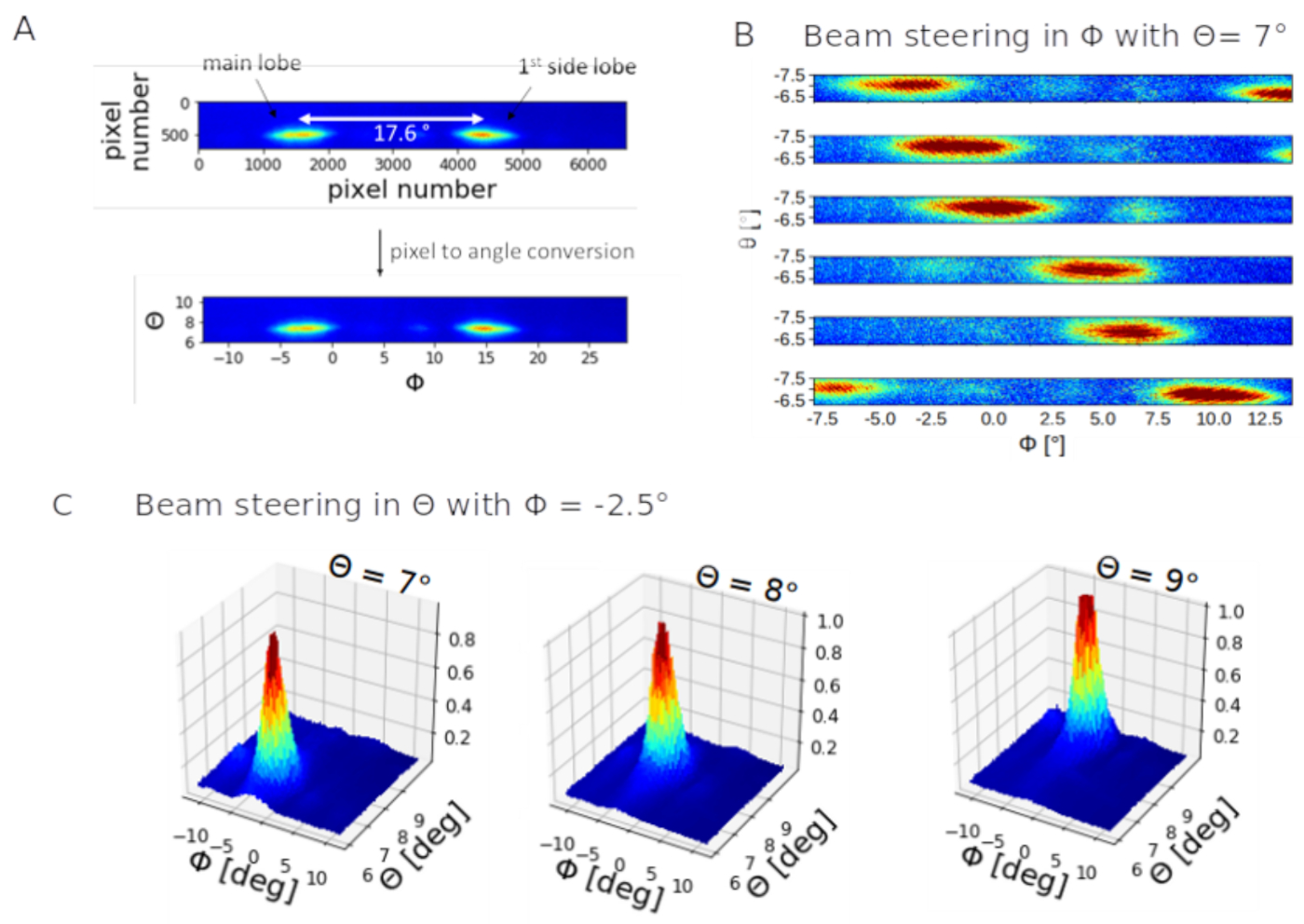
使用显微镜记录的光束近场图像可在图5A中看到。图片显示一个带大量通道的被动OPA电路,在 OPA 光栅处发出的光清晰可见。该电路在远场中产生干扰模式,该模式是使用CCD传感器记录的。传感器图像如图 5 Figure 5B所示,同时显示了基本叶和侧叶。传感器的曝光时间、激光功率和背景光经过优化,可生成清晰的图像。根据协议部分 4.2.2.1 中给出的方程计算,两个最大值由 17.6° 分隔。请注意,在此设计中,所有波导的长度相同,因此通道之间不存在明显的相位差异。因此,干扰最大值被明确分离。下面给出了通道之间存在不规则相位差的 OPA 电路的示例。
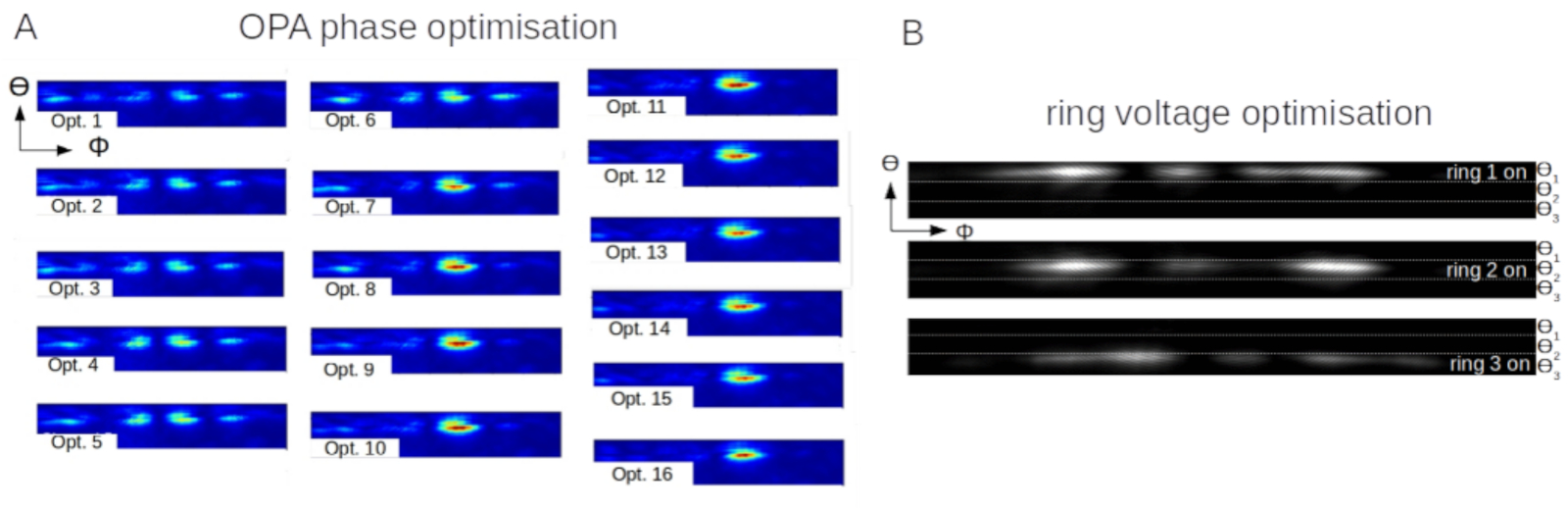
为了观察OPA输出模式中的明显干扰最大值,OPA通道之间需要线性相位差。但是,当输入和输出光栅之间的波导长度因通道而异时,干扰模式将沿直线沿垂直光栅方向的方向显示多个不规则干扰截面(即沿角度 +)。图 6A的左上图给出了此类输出模式的示例。它显示了输入和输出光栅之间具有不均匀波导长度的 16 通道 OPA 的远场输出。幸运的是,此 OPA 设计在每个通道中都包含了相移器,以便可以单独调整相位和输出光束形状。优化协议部分 3.3 中描述的相位后,输出光束形成一个清晰的最大值。图 6A显示了输出光束在优化过程中的演变方式。请注意,传感器区域外部存在进一步干扰最大值。此外,我们观察到16通道OPA的光束离散比图5B中所看到的要广泛得多。这种影响是预料之中的,是由于通道数量显著减少。
在下文中,将讨论OPA转向的光学电路在两维中的运行情况,有关电路的详细信息,请参见图2。首先,校准开关网络的环电压,以便将光线路由到不同的子电路,每个子电路都包含 OPA。由于四个 OPA 每个功能组都包含不同的光栅周期,因此在子电路之间布线光会导致输出光束以不同的 + 角度发射。如图 6 Figure 6B所示,其中包含使用交换网络的环形振子更改光路时记录的远场图像。图像显示,"平行"发射角度 α 会随着每个谐振器与输入灯的共振设置而变化,同时调整其他谐振器的谐振。我们的电路设计为可访问四个不同的角度,但是,由于交换网络中的设计错误,只能操作三个环振器。从输出图像中,我们可以看到干扰模式不规则,没有明显的最大值。为了在"垂直"发射角度引导和塑造输出光束,对OPA相进行了调整和优化。
图7A显示了二维光束转向电路优化输出光束的示例图像。两种干扰最大值清晰可见,对应于主叶和一侧叶。图 7 Figure 7A中的顶部图像显示了传感器与像素数记录亮度的热图。为了确定输出角度,按协议第 4.2 节所述处理了图像,以及确定的像素数和输出角度之间的关系。光束强度与角度的校准图像如图7A的最底部图像所示。
在下文中,将讨论光束转向结果。OPA 光束在 17.6° × 3° (+ = = ) 的区域内成功引导,示例数据如图7B和图7C所示。图 7B显示了光束在 ± 中引导的图像,同时保持 ± 恒定 8°。这是首先通过访问与平行发射角度 = = = 8° 对应的 OPA 实现的,然后改变光学相位以改变垂直发射角度,例如图 7 C 所示,图 7C中引导到三个不同输出位置的基本光束的标准化强度图,固定垂直发射角度为 ± ±-2.5°和 ± 变化在 7° 和 9° 之间。与以前一样,并行发射角度 = 使用环振电阻网络在 OPA 之间切换。OPA 选择后,OPA 相位经过优化,以 ± ± -2.5° 发出。
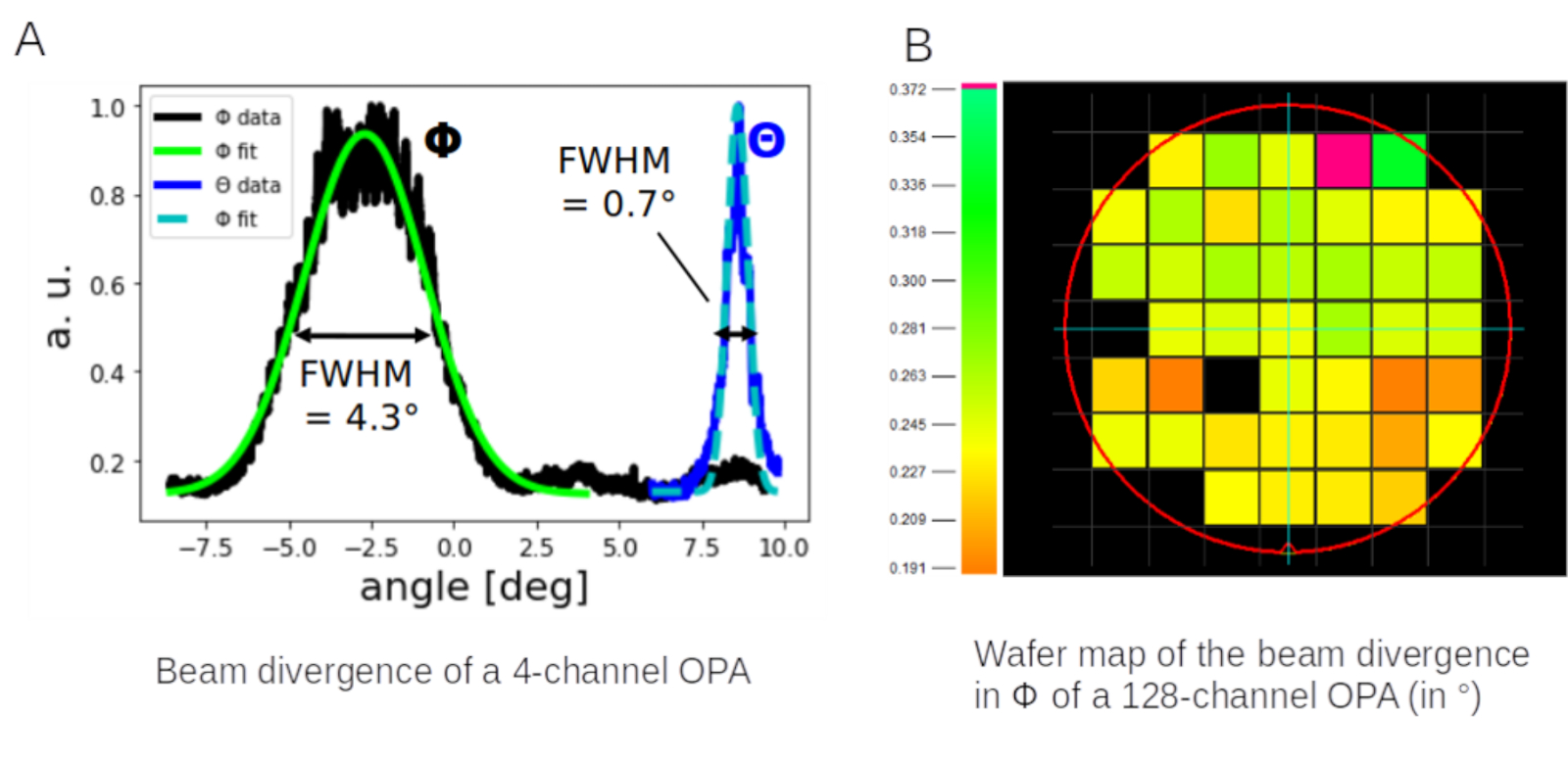
最后,按照协议第4.3节所述,沿 +和 + 拟合两个高斯曲线来确定光束发散。FWHM 用作光束发散的度量,测量为 4.3° (+ 和 0.7°)的发射角度 = ± -2.5° 和 ± = 8°, 参见图 8A。如协议第 4.3.3 节和第 4.3.4 节所述,这些值与四通道 OPA 中分别为 4.3° 和 0.6° 的预期值(分别为 4.3° 和 0.6°)和 ±值良好一致。除了确定四个通道 OPA 的背离外,我们还调查了具有更多通道的 OPA 设计的背离。测量了由 128 个通道组成的被动 OPA 的背离,其设计与图 5A所示的设计类似。为了测试晶圆的制造变化,我们推出了一个自动扫描功能,以描述42个具有相同设计的器件。根据光束发散情况对记录的图像进行了分析。图8B显示了器件在晶圆上的位置与位置的背离。测量值介于 0.19° 和 0.37° 之间,略高于预期值 0.14°。这可以由单个 OPA 通道内的相位错误来解释。设计中的所有波导长度相同,因此理论上 OPA 通道之间不应出现相位差异。但是,当光线从输入到输出光栅时,制造错误会导致不受控制的相位偏移,从而导致输出光束的扩大。由于电路中没有相移器,无法补偿这些误差。如前所述,α 角度由天线光栅几何体定义。因此,制造变化(SiN 薄膜高度和结构横向尺寸偏差)可能会影响 OPA 输出角度,μ。这种变化在整个晶圆的40个器件上都有特征。得益于控制良好的 CMOS 制造工艺,已发现可忽略不计的 3°(标准差的三倍)为 0.156°。

图1:集成OPA的插图。(A) OPA 输出的一阶干扰波以两个同音团角离开电路,分别与芯片平面的正交投影(α 和 α、垂直和平行)的方向平行。(B) 显示其主要构成元素的 OPA 的顶视图。请点击此处查看此图形的较大版本。
{kind=link}

图2:用于二维光束转向的集成光学电路的原理图和显微镜图像。(A) 包含连接到四个子电路的交换网络的电路,每个子电路形成一个 OPA。输出区域包含四个具有四个不同光栅周期的OPA,因此发射角度在(A)中描述的电路的显微镜图像中,使用 SiN 波导和 Ti/TiN 热相移器制造。B请点击此处查看此图形的较大版本。
{kind=link}

图3:电路施加0 mW至200 mW之间的电功率。此原理图表示一种电路,该电路可单独将电压施加到光电路中的相移器,并在电压应用后读取其电流。在我们的光电路中,变相器由电阻为 1.3 kΩ 的电线组成。实现 +的光相移需要 90 mW 的功率。该电路通过 Arduino 微控制器进行控制。请点击此处查看此图形的较大版本。
{kind=link}

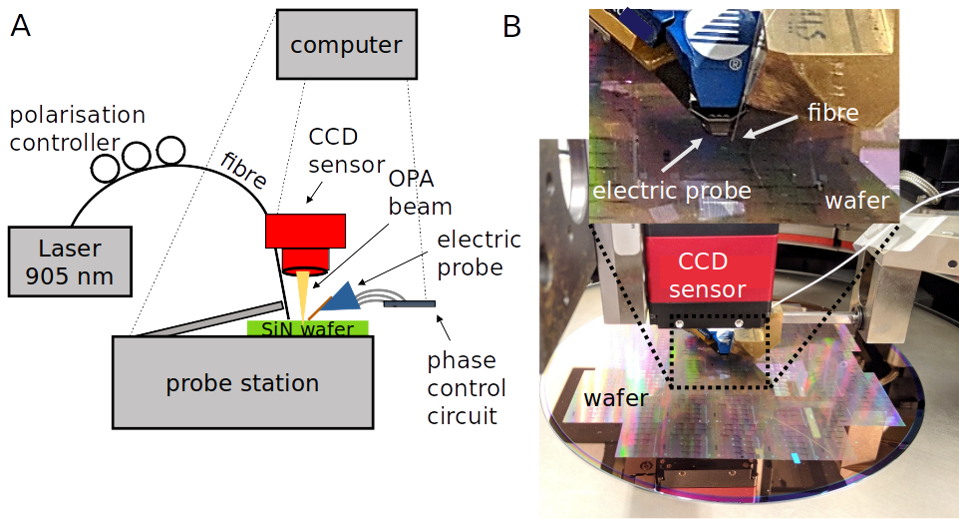
图4:OPA电路表征的实验设置。(A) 实验设置的原理图。(B) 实验图片.请点击此处查看此图形的较大版本。
{kind=link}

图 5:输出光束的近场和远场图像。(A) OPA 电路的近场图像。波长为 905 nm 的光通过光纤和输入光栅耦合到电路中。波导内光散射,让我们可以看到电路设计。在 MMI 树的末端,光在 OPA 光栅处发出。(B)中所示电路输出的远场图像。传感器上可以看到两个干扰最大值。根据OPA理论,最大值被分离了17.6°。请点击此处查看此图形的较大版本。
{kind=link}

图 6:OPA 光束优化和交换网络操作。(A) 使用相移器优化 16 通道 OPA 的 OPA 光束。每个优化步骤后都会显示远场图像。优化所有 16 个通道后,光束在传感器区域内形成最大一次主干扰。(B) 通过使用由环振振器组成的交换网络,可以访问每个包含不同光栅周期的不同 OPA。不同的光栅周期导致输出光束以不同的角度发射。请点击此处查看此图形的较大版本。
{kind=link}

图7:二维梁转向电路的表征。(A) 像素到角度转换记录的图像数据。光束转向结果在 + 和 = 分别显示在 (B) 和 (C) 中。这个数字是从泰勒等人16.请点击此处查看此图形的较大版本。
{kind=link}

图 8:OPA 光束发散测量。(A) 4 通道 OPA 的光束离散分析。这个数字是从泰勒等人16.(B) 128 通道 OPA 设计中测得的离散的晶圆图。请点击此处查看此图形的较大版本。
{kind=link}
讨论
我们提出了一种描述综合OPA的方法。该方法的主要优点是能够轻松地探测晶圆上的多个模具,查找制造变化并识别高性能设备。这可以从图 8B中看到。从晶圆扫描中,很明显,晶圆的下半部分显示具有较低光束发散的器件。这可以通过该地区更高的波导质量来解释,这减少了随机相位移,从而减少了光束发散。
使用大面积CCD传感器对远场输出进行成像是一种方便的方法,可以成像集成电路的自由空间输出,因为它的体积与常用的、体积较大的傅立叶成像系统6相比,很容易添加到大多数表征设置中。
为了保证光束角度和发散测量的高精度,在摄像机 - OPA 对准过程中必须特别注意。此外,OPA 响应对校准期间的相位和极化不稳定性很敏感。因此,必须控制所有扰动源:喷射纤维的运动/振动、激光温度、入射光极化等。
总之,提出了一种对综合业务机会的定性方法。详细介绍了如何耦合光,如何控制电路中的相移器,以及如何对近场和远场的输出进行成像。显示了多个OPA电路输出光束的典型图像,包括近红外中单波长的光束转向两维的结果。此外,我们还展示了在晶片上测量不同设计的不同器件在光束发散方面的结果。发现晶圆位置的性能趋势,确定具有高质量制造性能的区域。
披露声明
作者没有什么可透露的。
致谢
这项工作由法国国家指导部通过DEMO3S项目资助。
材料
| Name | Company | Catalog Number | Comments |
| 25 ch electrical Probe | Cascade Microtech | InfinityQuad 25ch | |
| 35 mm CCD sensor | Allied Vision | Prosilica GT 6600 | |
| Arduino uno | Arduino | A100066 | |
| laser | Qphotonics | QFLD-905-10S | |
| optical fibre | Corning | HI780 | |
| polarization controller | ThorLabs | FPC023 | |
| prober station | Cascade Microtech | Elite 300 |
参考文献
- Heck, M. J. Highly integrated optical phased arrays: Photonic integrated circuits for optical beam shaping and beam steering. Nanophotonics. 6 (1), 93-107 (2017).
- Vasey, F., Reinhart, F. K., Houdré, R., Stauffer, J. M. Spatial optical beam steering with an AlGaAs integrated phased array. Applied Optics. 32 (18), 3220-3232 (1993).
- Van Acoleyen, K., et al. Off-chip beam steering with a one-dimensional optical phased array on silicon-on-insulator. Optics Letters. 34 (9), 1477-1479 (2009).
- Guo, W., et al. Two dimensional optical beam steering with InP-based photonic integrated circuits. IEEE Journal of Selected Topics in Quantum Electronics. 19 (4), 6100212(2013).
- Jalali, B., Fathpour, S. Silicon photonics. Journal of Lightwave Technology. 24 (12), 4600-4615 (2006).
- Hulme, J. C. Fully integrated hybrid silicon two dimensional beam scanner. Optics Express. 23 (5), 5861-5874 (2015).
- Chung, S., Abediasl, H., Hashemi, H. A monolithically integrated large-scale optical phased array in silicon-on-insulator CMOS. IEEE Journal of Solid-State Circuits. 53 (1), 275-296 (2018).
- Poulton, C. V., et al. Large-scale silicon nitride nanophotonic phased arrays at infrared and visible wavelengths. Optics Letters. 42 (1), 21-24 (2017).
- Poulton, C. V., et al. Coherent solid-state LIDAR with silicon photonic optical phased arrays. Optics Letters. 42 (20), 4091-4094 (2017).
- Martin, A., et al. Photonic integrated circuit based FMCW coherent LiDAR. Journal of Lightwave Technology. 36 (19), 4640-4645 (2018).
- Subramanian, A. Z., et al. Low-Loss Single mode PECVD Silicon Nitride Photonic Wire Waveguides for 532-900 nm Wavelength Window Fabricated Within a CMOS Pilot Line. IEEE Photonics Journal. 5 (6), 2202809(2013).
- Baets, R., et al. Silicon Photonics: silicon nitride versus silicon-on-insulator. Optical Fiber Communication Conference, OSA Technical Digest (online) (Optical Society of America). , paper Th3J.1 (2016).
- Sabouri, S., Jamshidi, K. Design Considerations of Silicon Nitride Optical Phased Array for Visible Light Communications. IEEE Journal of Selected Topics in Quantum Electronics. 24 (6), (2018).
- Zadka, M., et al. On-chip platform for a phased array with minimal beam divergence and wide field-of-view. Optics Express. 26 (3), 2528-2534 (2018).
- Tyler, N. A., et al. SiN Integrated Photonics for near-infrared LIDAR. 2018 IEEE CPMT Symposium Japan (ICSJ). , 63-66 (2018).
- Tyler, N. A., et al. SiN integrated optical phased arrays for 2-dimensional beam steering at a single near-infrared wavelength. Optics Express. 27 (4), 5851-5858 (2019).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。