
Method Article
웨이퍼 스케일 테스트 스테이션에서 SiN 통합 광학 위상 어레이의 특성화
요약
여기서, 광학 위상 배열을 포함하는 SiN 통합 포토닉 회로의 작동에 대해 설명합니다. 회로는 근적외선에서 낮은 발산 레이저 빔을 방출하고 두 가지 차원으로 조종하는 데 사용됩니다.
초록
광학 위상 배열(OPA)은 저발산 레이저 빔을 생성할 수 있으며 기계적 부품을 움직일 필요 없이 전자적으로 방출 각도를 제어하는 데 사용할 수 있습니다. 이 기술은 빔 스티어링 애플리케이션에 특히 유용합니다. 여기서는 근적외선의 파장을 위해 SiN 광도 회로에 통합된 OPA에 중점을 둡니다. 이러한 회로의 특성화 방법이 제시되어 통합 OPA의 출력 빔을 모양과 조향할 수 있습니다. 또한 웨이퍼 스케일 특성화 설정을 사용하여 웨이퍼의 여러 다이에서 여러 장치를 쉽게 테스트할 수 있습니다. 이러한 방식으로 제작 변형을 연구하고 고성능 장치를 식별할 수 있습니다. 균일한 도파관 길이와 다양한 수의 채널로 OPA에서 방출되는 빔을 포함하여 OPA 빔의 일반적인 이미지가 표시됩니다. 또한 위상 최적화 프로세스 및 빔 조향 시 출력 빔의 진화가 2차원으로 제공됩니다. 마지막으로, 웨이퍼에서의 그들의 위치에 대하여 동일한 장치의 빔 발산의 변화에 대한 연구가 수행된다.
서문
광학 위상 배열(OPA)은 광학 빔을 기계적으로 형상화하고 조종하는 능력으로 인해 유리합니다-이는 광 검출 및 레인징(LIDAR), 자유 공간 통신 및 홀로그램 디스플레이1과같은 광범위한 기술 응용 분야에서 유용하다. 포토닉 회로에 OPA를 통합하는 것은 작은 물리적 설치 공간으로 제작을 위한 저렴한 솔루션을 제공하기 때문에 특히 흥미롭습니다. 통합 OPA는 InP, AlGaA 및,실리콘2,3,34를포함한 다양한 재료 시스템을 사용하여 성공적으로 입증되었습니다. 이러한 시스템 중 실리콘 포토닉스는 높은 굴절률 대비와 CMOS5와의호환성으로 인해 가장 편리할 것입니다. 실제로 OPA 회로는 실리콘 온,절연체 플랫폼6,7,78,89,,10에서광범위하게 입증되었습니다. 그러나 이러한 회로의 적용은 실리콘의 파장 투명창과 높은 비선형 손실로 인해 제한되며, 이는 사용 가능한 출력 광 전력에 대한 제한으로 이어진다. 우리는 대신 SiN에 통합 된 OPA에 초점을 맞추고, CMOS 기능 및 풋 프린트 크기11,,12의 관점에서 실리콘과 유사한 특성을 가진 재료. 그러나 실리콘과 는 달리, SiN은 투명도 창이 더 넓고 최소 500 nm까지 내려가며 상대적으로 낮은 비선형 손실로 인해 높은 광학 전력 덕분에 더 넓은 범위의 응용 분야에 적합할 것으로 예상됩니다.
OPA 통합의 주체는 최근 SiN8,13,,14를사용하여 입증되었습니다. 여기서, 우리는 2차원 빔 스티어링을 위한 통합 OPA의 특성화 및 운영 방법을 입증하기 위해 이러한 주체들을 확장할 것이다. 파장6의튜닝에 의존하는 2차원 빔 스티어링의 이전 시연과 비교하여, 우리의 회로는 단일 파장에서 작동할 수 있습니다. 먼저 OPA의 운영 원칙에 대한 간략한 개요를 제공합니다. 그 다음에는 이 작업에 사용되는 회로에 대한 소개가 뒤따릅니다. 마지막으로, 특성화 방법이 설명되고 OPA 출력 빔의 전형적인 이미지가 제시되고 논의된다.
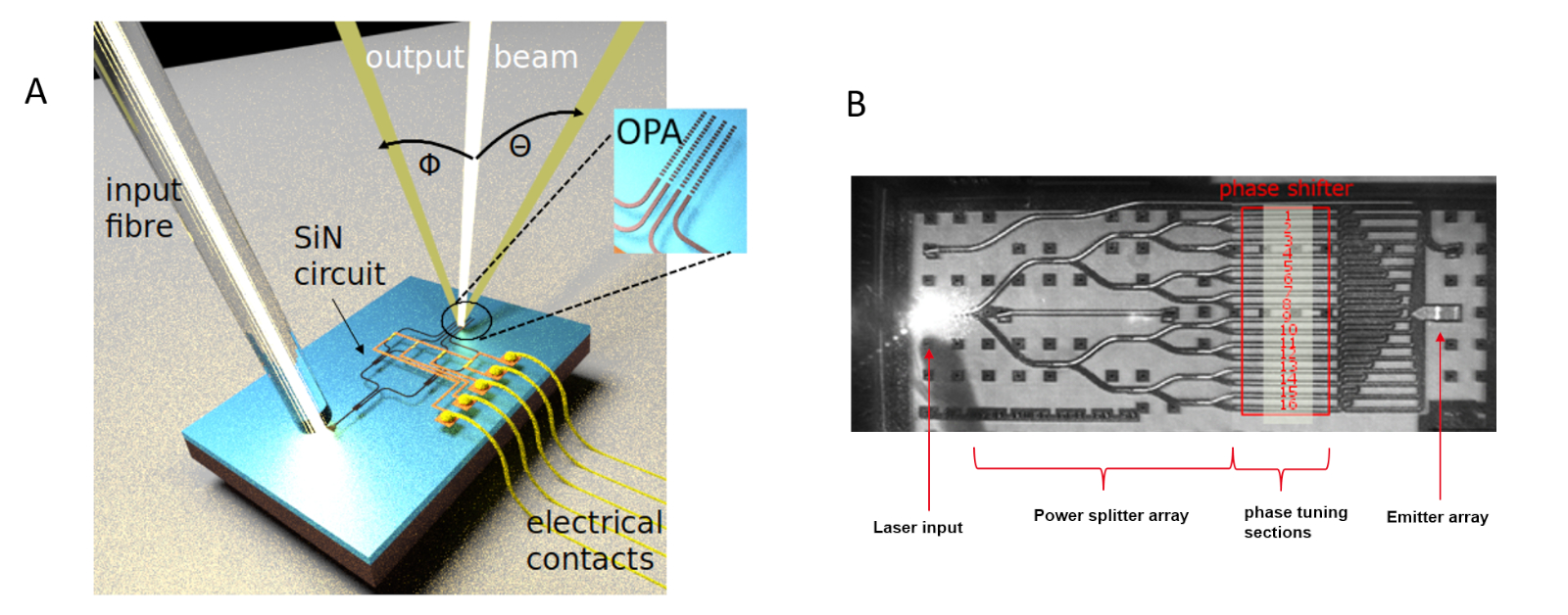
OPA는 광학 위상을 제어하기 위해 개별적으로 해결할 수 있는 밀접한 간격의 이미터배열로 구성됩니다. 이미터 어레이에 선형 위상 관계가 존재하는 경우, 원거리 필드의 간섭 패턴은 다중 슬릿 간섭원리와 유사하게 여러 개의 명확하게 분리된 최대를 생성합니다. 위상 차의 크기를 제어함으로써 최대치의 위치를 조정할 수 있으며, 따라서 빔 스티어링이 수행됩니다. 통합 OPA에서 이미터는 빛이 분산되어 칩 평면에서 방출되는 밀접한 간격의 회절 격자로 구성됩니다. 통합 OPA 장치의 개략적 그림은 그림 1A,B에나와 있습니다. 광은 칩내로 결합되고, 이 경우 광섬유를 통해, 그리고 각각 통합상 시프터를 포함하는 여러 채널로 나뉜다. 광학 회로의 다른 쪽 끝에서 도파관은 격자에서 종단되고 결합되어 OPA를 형성합니다. 생성된 출력 빔은 다중 간섭 최대값으로 구성되며, 그 중 가장 밝은 빔은 기본 로브라고 하며 빔 스티어링 애플리케이션에서 가장 자주 사용되는 빔 빔 빔입니다. 기본 로브의 방출 방향은 칩 평면의 직교 투영에 대한 두 개의 azimuthal 각도에 의해 정의되며, φ 및 θ, 각각 격자의 배향에 수직 및 평행. 이 문서에서 φ와 θ는 각각 '수직' 및 '평행' 방출 각도로 지칭됩니다. 수직 각도 φ는 OPA 채널 간의 위상 차이에 의해 결정되며 병렬 각도 θ는 출력 격자의 기간에 따라 달라집니다.
당사의 집적 회로는 600 x300nm2의단면을 가진 Si 3 N4 도파관을 사용하여 제작되었으며, 905 nm의 파장에서 빛의 기본 횡방향 전기 편광 모드에 최적화된 설계입니다. 도파관 아래에는 실리콘 웨이퍼 위에 2.5 μm SiO2 버퍼 층이 있습니다. 열상 시프터는 길이 500 μm 및 2 μm 폭 의 저항 와이어를 형성하는 데 사용되는 10 (100) nm 두께의 Ti (TiN) 층으로 만들어졌습니다. 우리의 회로에서 π의 위상 이동을 달성하기 위해 90mW의 전력이 필요합니다. OPA 출력 격자는 공칭 충진 계수가 0.5이고 격자 기간이 670 nm에서 700 nm 사이의 750 완전 에칭 기간으로 구성됩니다. 플랫폼 설계 및 제작에 대한 자세한 내용은 Tyler 외15,16에서제공됩니다.
이 작업에서는 위상 변속 기능이 없는 패시브 회로와 2차원 빔 스티어링을 수행하도록 설계된 보다 복잡한 회로가 특징입니다. 2차원 빔 스티어링 회로는 그림 2에나와 있습니다. 도 2A는 회로의 회로도를 포함하고 도 2B는 제조된 장치의 현미경 영상을 나타낸다. 입력 격자에서 표시등이 회로에 들어갑니다. 그런 다음 스위칭 네트워크에 도달하여 4개의 하위 회로 중 하나를 선택적으로 라우팅할 수 있습니다. 각 서브 회로는 멀티 모드 간섭 장치(MMI)를 사용하여 빛을 4개의 채널로 분할합니다. 채널은 각각 열 상 시프터를 포함하고 회로의 끝에 OPA를 형성한다. 4개의 서브 회로로부터 유래된 4개의 OPA는 각각 670 nm 및 700 nm 사이의 상이한 격자 기간을 포함한다. 이 기간은 격자 축, θ, 7 ° 및 10 ° 사이의 평행 한 azimuthal 각도에 해당합니다. 회로에 대한 자세한 설명은 타일러 외16에서찾을 수 있습니다.
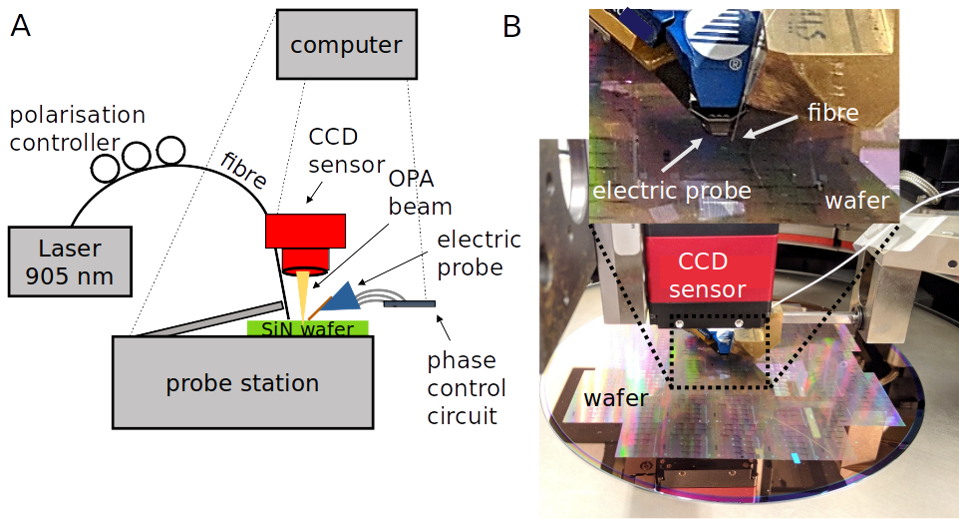
제시된 특성화 설정은 전체 웨이퍼에서 여러 회로에서 일련의 측정을 수행할 수 있는 자동화된 프로빙 스테이션을 기반으로 합니다. 이를 통해 웨이퍼의 위치를 기준으로 성능 변동을 연구하고 최적의 특성을 가진 장치를 선택할 수 있습니다. 그러나, 프로버 스테이션의 사용은 웨이퍼 위의 비교적 작은 사용 가능한 공간으로 인해 OPA 특성화 방식에 대한 일부 물리적 제약을 의미한다. 광학 위상 배열의 특성화는 여러 가지 방법으로 수행 될 수있는 먼 필드에서 OPA 출력을 이미징해야합니다. 예를 들어, 일련의 렌즈는 푸리에 이미징 시스템6에서 사용될 수 있거나 램베르시안 표면에 형성된 원거리 이미지는 반사 또는 투과 중 하나에서 볼 수 있다. 우리의 시스템을 위해, 우리는 웨이퍼 표면 위에 약 50mm를 배치 렌즈없이 큰 표면 35mm x 28mm CMOS 센서를 배치의 가장 간단하고 가장 컴팩트 한 솔루션으로 간주 무엇을 선택했다. 이러한 대형 CCD 센서의 비용 증가에도 불구하고 이 솔루션은 렌즈를 사용하지 않고도 충분한 시야를 제공합니다.
프로토콜
1. 준비
- 다음 실험 설정을 준비합니다(그림4).
- 컴퓨터를 사용합니다.
- 연속 파섬유 결합 레이저 소스를 사용한다. 회로 손실에 따라 1mW 의 전력으로 충분합니다. 제시된 특성화 설정에서, 레이저 소스는 905 nm의 파장에 있다.
- 레이저 파장에 맞게 조정된 편광 컨트롤러를 사용합니다.
- 갈라진 입력 섬유를 사용하여 광 회로의 입력 격자 커플러에 빛을 결합합니다.
- 전기 프로브를 사용하여 전자 제어 보드를 광학 회로의 전기 접촉에 연결합니다.
- 2차원 빔 조향 회로의 20상 변조기를 제어할 수 있는 시스템을 사용한다. 제시된 특성화 설정에서 이 시스템은 아두이노(Arduino)가 제어하는 맞춤형 전자 보드로, 광학 회로의 위상 변속기에서 0~200mW의 전력을 개별적으로 적용할 수 있습니다. 전기 회로의 회로도는 그림 3에나와 있습니다. 각 채널에 대해 회로에는 디지털 명령 전압을 고전력 트랜지스터의 게이트를 제어하는 아날로그 전압으로 변환하는 DAC(디지털- 아날로그 컨버터)가 포함되어 있습니다. 히터는 고전력 전류 소스에 연결됩니다. 따라서 게이트 장력을 제어함으로써 히터의 전류 흐름을 조정할 수 있습니다.
- 베어 이미지 센서를 사용하여 광 출력의 먼 필드를 이미지화합니다. 제시된 특성화 설정에서 카메라는 35mm CCD 센서입니다.
- 정렬을 위해 칩을 이미지화하려면 광학 현미경을 사용합니다.
- 3축 변환 스테이지를 사용하고 200mm 웨이퍼에 맞게 마운트합니다. 제시된 특성화 설정에서 이 단계는 실리콘 포토닉스를 위한 재구성 가능한 프로브 시스템입니다.
- 장비 조립
- 그림 4에 따라 장비를 조립하고 웨이퍼를 장착합니다. 웨이퍼와 센서 사이의 거리는 출력 빔의 고해상도 이미지를 보장하기에 충분히 작게 선택되어야 하지만, 프로토콜의 섹션 4에서 설명되는 바와 같이 센서 픽셀과 출력 각도 사이의 관계를 찾을 수 있도록 적어도 두 개의 간섭 최대값에 맞을 만큼 충분히 크다.
- 센서와 웨이퍼가 평행하게 되어 있는지 확인하십시오. 그렇지 않으면 픽셀/출력 각도 계산의 계산을 위조할 수 있습니다. 제시된 특성화 설정에서 웨이퍼 센서 거리를 5cm로 설정합니다. 이중 센서 구성이 사용되는 경우(여기에 제시된 센서와 같이) 섬유 정렬을 위해 근거리 시야를 이미지화하기 위해 베어 센서를 쉽게 제거하여 광학 현미경에 액세스할 수 있는지 확인합니다.
- 전기 프로브, 카메라 및 광섬유가 서로 닿지 않는지 확인하십시오. 필요한 요소를 컴퓨터에 연결합니다. 제시된 설정에서 프로브 스테이션은 측정 프로세스를 자동화하기 위해 컴퓨터와 Python 프로그램을 통해 위상 제어를 위한 CCD 센서 및 전기 회로를 구동합니다.
2. 광학 커플링
- 섬유 정렬
- 현미경을 사용하여 웨이퍼 표면에 닿을 때까지 조심스럽게 하강하여 (손상을 피하기 위해 입력 격자 커플러에서 멀리) 약 20 μm위로 이동합니다.
- 이 작업이 완료되면 출력 격자에서 광 강도를 최대화합니다. 이렇게 하려면 OPA 입력 격자 커플러 위로 섬유 위치를 스위핑하십시오. 현미경에 부착된 카메라가 레이저 파장에 반응하는 경우(베어 이미지 센서를 사용하지 않는 경우), 섬유와 격자 커플러가 잘 정렬된 경우 OPA 출력 격자에서 나가는 빛이 이미지에 표시되어야 합니다. 예를 들어 그림 5A.
- OPA 안테나에서 빛이 표시되면 출력 격자에서 광 강도를 최대화하기 위해 편광을 조정합니다. 입력 섬유의 움직임이나 진동을 피하십시오.
- OPA 출력 이미징
- 원거리 이미징 센서로 전환하고 이미지 품질 향상: OPA 출력이 카메라에 선명하게 표시되고 빔이 센서를 포화시키지 않도록 센서의 노출 시간과 레이저 전력을 모두 조정합니다. 센서에 의해 기록된 예상은 도 5B에나와 있다.
- 필요한 경우 배경 광이 OPA 빔의 이미지를 방해하지 않도록 설정을 덮습니다. 일반적으로 배경 광이 약할수록 레이저 파워가 낮아지므로 설정할 수 있습니다.
- 반사와 카메라 사이에 반사가 높은 시트를 배치하여 반사를 차단합니다. 때로는 웨이퍼 표면에서 발생하는 반사가 센서 영역에 도달하여 OPA 출력의 이미지를 오염시음할 수 있습니다(입력 격자에서 반사가 발생할 수 있음).
- 입력 라이트의 편광을 재조정하여 선명한 이미지를 얻습니다.
3. 빔 최적화 및 스티어링
참고: 이 섹션에서는 그림 2에 표시된 회로의 작동과 빔 스티어링을 2차원으로 수행하는 데 사용할 수 있는 방법에 대해 설명합니다.
- 준비
- 위상 제어를 위한 전기 회로를 다중 채널 전기 프로브에 연결합니다.
- 현미경을 사용하여 전기 프로브의 핀을 광학 회로의 금속 접촉 패드에 연결합니다.
- 입력 섬유의 위치를 다시 최적화합니다.
- 원거리 필드 센서로 전환하고 출력을 이미지화합니다.
- 스위칭 네트워크를 이용한 평행 방출 각 θ 선택
- θ에서 방출 각을 제어하기 위해 스위칭 네트워크의 링 공진기를 연구합니다. 이를 위해 링 공진기의 위상 변속기에 가해지는 전압을 변화시키면서 출력의 원거리 장부 이미지를 관찰합니다. 각 공진기에 올바른 전압이 가해지면 그림 6B와같이 센서의 다른 영역이 특정 θ 값에 해당하는 조명을 받게 됩니다.
- 링이 켜고 꺼지는 전압을 찾습니다. 이를 위해 자동화된 스크립트를 사용하여 공진기 전압을 스윕하고 센서의 다른 θ 영역에 강도를 기록할 수 있습니다. 발견된 전압을 사용하여 다양한 서브 회로에 액세스하고 출력 빔을 θ로 조향합니다.
- OPA 단계를 최적화하여 직교 방출 각도 φ 선택
- OPA 단계를 최적화하여 출력 빔을 φ로 형성하고 조종합니다. 이를 위해 포커스가 있는 출력 빔으로 조명되어야 하는 작은 픽셀 영역(원하는 φ 각도에 해당)을 선택합니다.
- 다음 최적화 루틴을 실행하여 선택한 영역 내부의 밝기를 최대화합니다.
- OPA 채널 중 하나의 위상을 작은 단위로 이동합니다. 각 교대 후, 내부 픽셀 영역의 밝기의 적분기록,I, 외부, IO, 선택한 영역의. 비율 R =I /IO를 계산합니다. 0에서 2π 사이의 전체 위상 시프트 주기 후 가장 높은 기록된 밝기 비율 R로 위상 시프트를 적용합니다.
- 다음 OPA 채널에서 이 단계 최적화 프로세스를 반복합니다. 언덕 오르기와 같은 다른 최적화 알고리즘을 사용할 수 있습니다.
- 최적화 프로세스가 포화되고 집중된 출력 빔이 표시될 때까지 위상을 최적화하여 최적화 프로세스를 반복합니다. 최적화 프로세스 중에 촬영한 출력 빔의 예는 도 6A에도시되어 있습니다. 16개의 최적화 라운드가 끝나면 출력 빔에 포커스가 있는 빔이 표시됩니다.
참고: 예기치 않은 피크가 추가로 있는 경우 최적화 프로세스 중에 회로에 일시적으로 불안정한 결합이 발생할 수 있습니다. 이는 입력 섬유의 이동 및/또는 불안정한 편광 상태 때문일 수 있습니다.
- 출력 빔을 다른 φ 각도로 조정하려면 새 픽셀 영역을 선택하고 최적화 프로세스를 반복합니다.
4. 빔 발산 측정 및 이미지 분석
- 이미지 수집
- 입력 섬유의 위치를 최적화합니다. 출력 이미지를 원거리 필드에 기록합니다. 두 개 이상의 명확한 간섭 최대가 표시되는지 확인합니다.
- 정렬 시스템을 사용하여 다음 장치를 입력 섬유에 정렬하기 위해 웨이퍼를 이동합니다. 카메라가 기록한 출력 강도를 최대화하여 미세한 정렬을 수행합니다. 출력 이미지를 기록합니다.
- 관심 있는 모든 장치가 특성화될 때까지 위의 단계를 반복합니다. 선택한 광학 회로에 OPA 채널의 위상 조정 기능이 있는 경우 이미지를 기록하기 전에 위상 최적화 루틴을 수행합니다.
- 이미지 분석
- 죽은 픽셀이나 핫 픽셀과 같은 결함이 있는 픽셀에서 발생하는 잘못된 데이터 요소가 기록된 이미지를 확인합니다. 이러한 데이터 포인트를 지우거나 값을 일반 값으로 바꿉습니다.
- CCD 픽셀을 OPA 출력 각도 φ및 θ와 상관관계는 다음과 같습니다.
- Δφ = sin-1(λ/d) [°]를 사용하여 OPA-1설계에 따라 간섭 최대값 사이의 각도 거리 Δφ를 계산하고, 여기서 λ는 파장과 d는 OPA 격자 사이의 측면 피치이다. 두 개의 가우시안 곡선을 두 개의 간섭 최대값에 맞추고 P1 및P2의두 중심의 위치를 결정합니다. 두 중심 사이의 거리(픽셀) N =P2 -P1은Δφ에 대응할 것으로 예상되므로 픽셀과 각도 c 사이의 변환 계수 c를 구합니다= Δφ/N [°/pixel]을 획득하여 픽셀 간의 상대적인 각도 관계를 얻는데 사용할 수 있습니다.
- 웨이퍼 표면과 센서 사이의 거리의 정확한 측정을 통해 변환 계수, c, 및 픽셀 크기(여기서 사용되는 센서의 경우 5.5*5.5μm)를 구한다.
- CCD 픽셀 중 하나에 대해 φ및 θ의 절대 출력 각도를 추정합니다. 시뮬레이션에 따라 빔 중심을 예상 방출 각도로 θ로 설정합니다. φ에서 절대 값을 선택하려면 OPA 단계를 조정하여 φ의 여러 각도에 대한 빔을 최적화하고 각 각도에 대한 주 로브의 강도를 기록합니다. OPA 이론에 따르면, φ = 0 °에서 방출 할 때 주요 로브가 가장 강렬하고 측면 로브의 강도가 최소화됩니다. 따라서 최대 기록된 빔 강도로 빔 중앙에 픽셀을 φ = 0°로 설정합니다. 이 픽셀과 변환 계수를 사용하여 이미지의 모든 픽셀에 절대 각도를 할당합니다.
- 수직 축에 대하여 상당한 기울기를 가진 출력 빔의 경우, 빔 발산 및 위치를 매우 정확하게 측정해야 하는 경우, 출력 빔에 완벽하게 수직이되기 위해 카메라를 기울인다. 그렇지 않으면 출력 빔과 카메라 평면 사이의 각도에 따라 센서상에 빔의 투영을 계산하여 측정된 빔 크기에 보정 계수를 적용할 수도 있습니다.
- 빔 발산 계산
- φ및 θ를 따라 기본 빔의 중심을 가로질러 단면을 추출합니다.
- 두 개의 가우시안 곡선을 단면에 맞추고 빔 발산 φdiv 및div에대한 측정값으로 전체 너비-반-최대값을 추출합니다.
- 예상 빔 폭 φdiv = λ/Nd [°]를 계산하며, 여기서 λ는 파장과 OPA 격자 사이의 측면 거리입니다.
- 출력 격자의 FDTD 시뮬레이션을 수행하여 빔 발산 θdiv를 추정합니다.
- 자동 테스트
- 특성화 벤치(여기에 제시된 대로)가 자동 측정을 수행할 수 있는 경우 몇 가지 추가 단계를 수행합니다. 먼저 회로 레이아웃에서 칩 치수와 측정된 구조의 좌표를 가져옵니다. 그런 다음 이러한 값을 벤치 제어 소프트웨어에 입력합니다. 따라서 입력 섬유가 첫 번째 테스트 구조(섹션 2.1에 자세히 설명됨)에 정렬되면 벤치는 웨이퍼의 변환을 통해 한 구조에서 다른 구조로 자동으로 전환할 수 있습니다.
결과
이 섹션에서는 OPA 빔의 오페라 도 이미지의 여러 가지가 표시됩니다. 여기에는 빔의 근거리 및 원거리 필드의 이미지, 위상 최적화 전후의 OPA 출력 빔 및 다양한 수의 OPA 채널이 있는 빔이 포함됩니다.
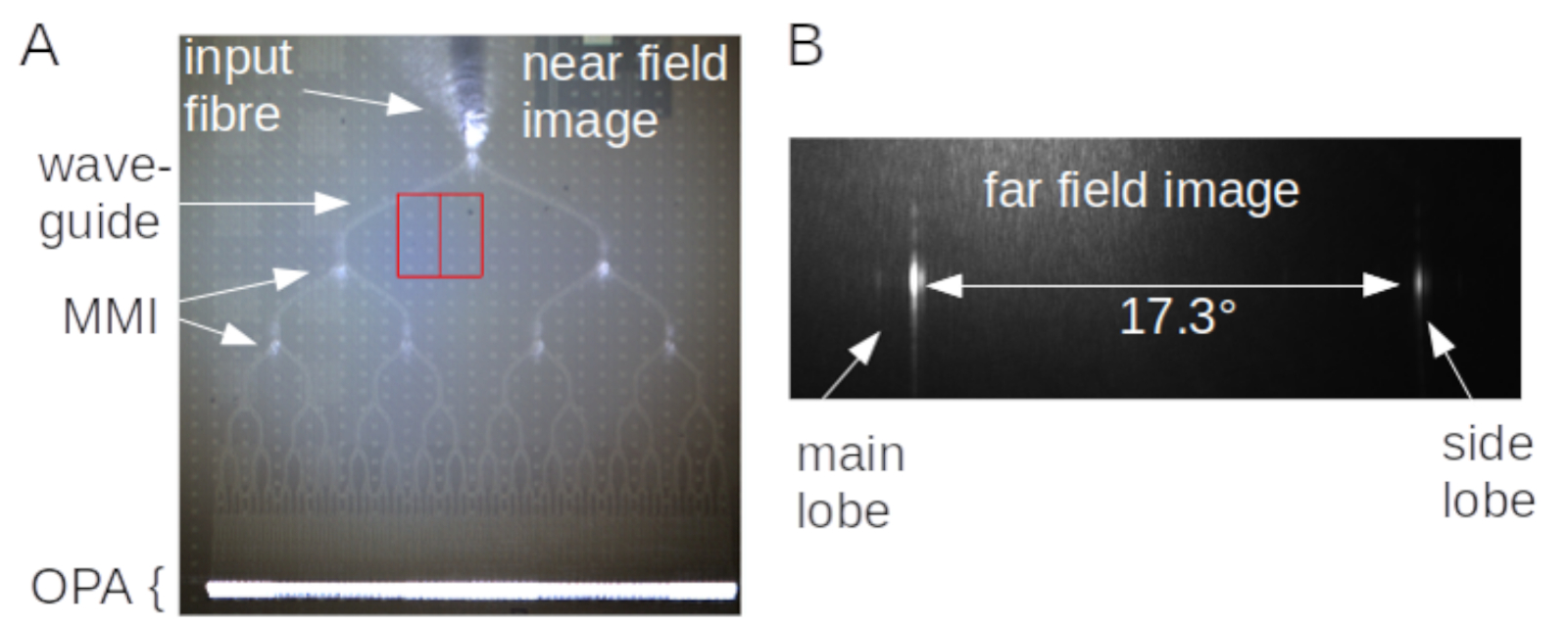
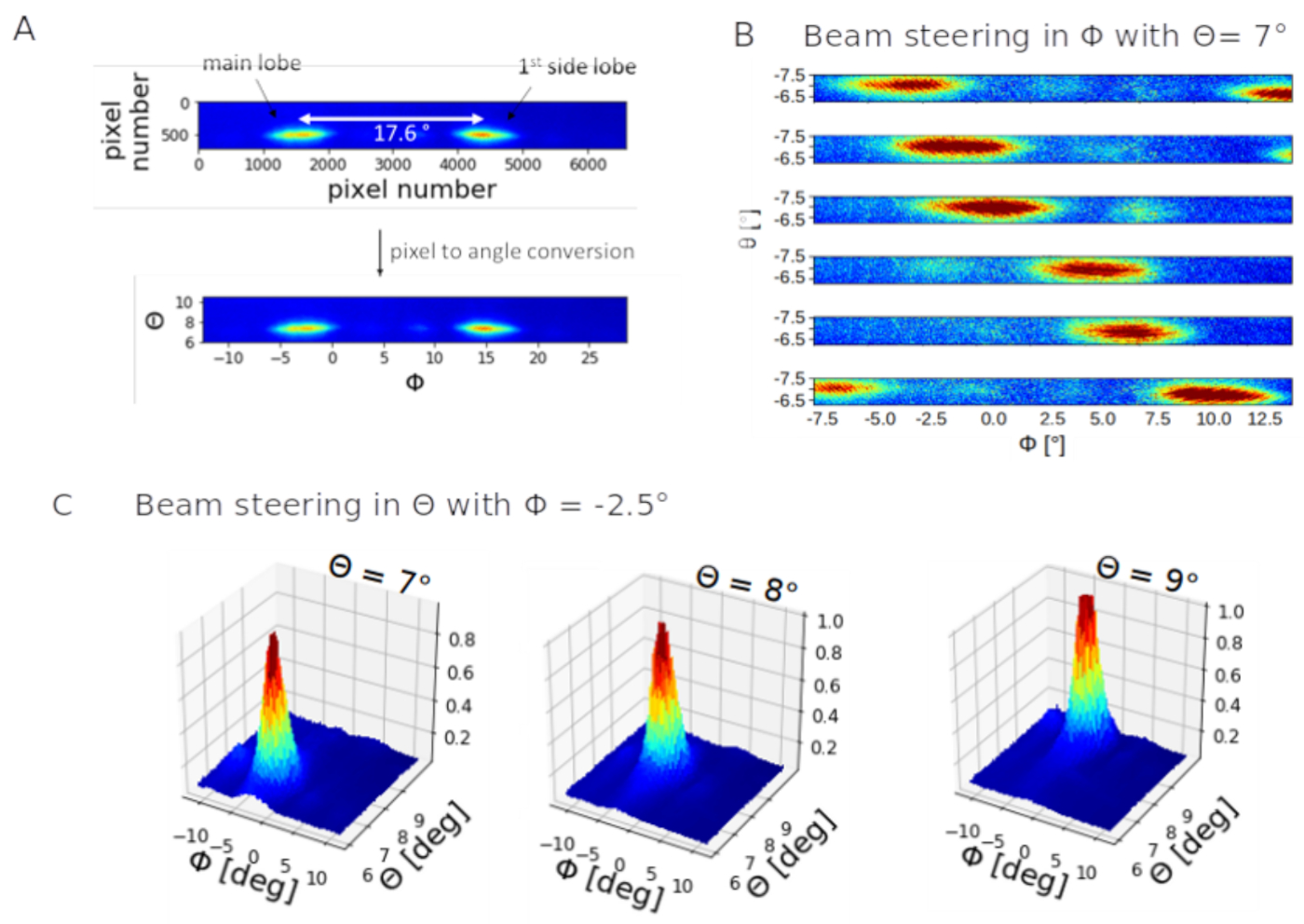
현미경을 사용하여 기록된 빔의 근거리 필드의 이미지는 그림 5A에서볼 수 있습니다. 그림은 많은 수의 채널이 있는 패시브 OPA 회로를 보여주며 OPA 격자에서 방출되는 빛이 선명하게 보입니다. 이 회로는 CCD 센서를 사용하여 기록된 원거리 에서 간섭 패턴을 생성합니다. 센서 이미지는 도 5B에 제공되며 기본 로브와 측면 로브를 모두 보여줍니다. 센서의 노출 시간, 레이저 전력 및 배경 광이 최적화되어 선명한 이미지를 생성합니다. 두 격막은 프로토콜 섹션 4.2.2.1에 주어진 방정식에 따라 계산된 17.6°로 구분됩니다. 이 설계에서는 모든 도파관의 길이가 동일하므로 채널 간에 유의한 위상 차이가 없습니다. 그 결과 간섭 최대가 명확하게 분리됩니다. 채널 간의 불규칙한 위상 차이를 가진 OPA 회로의 예는 아래에 제시된다.
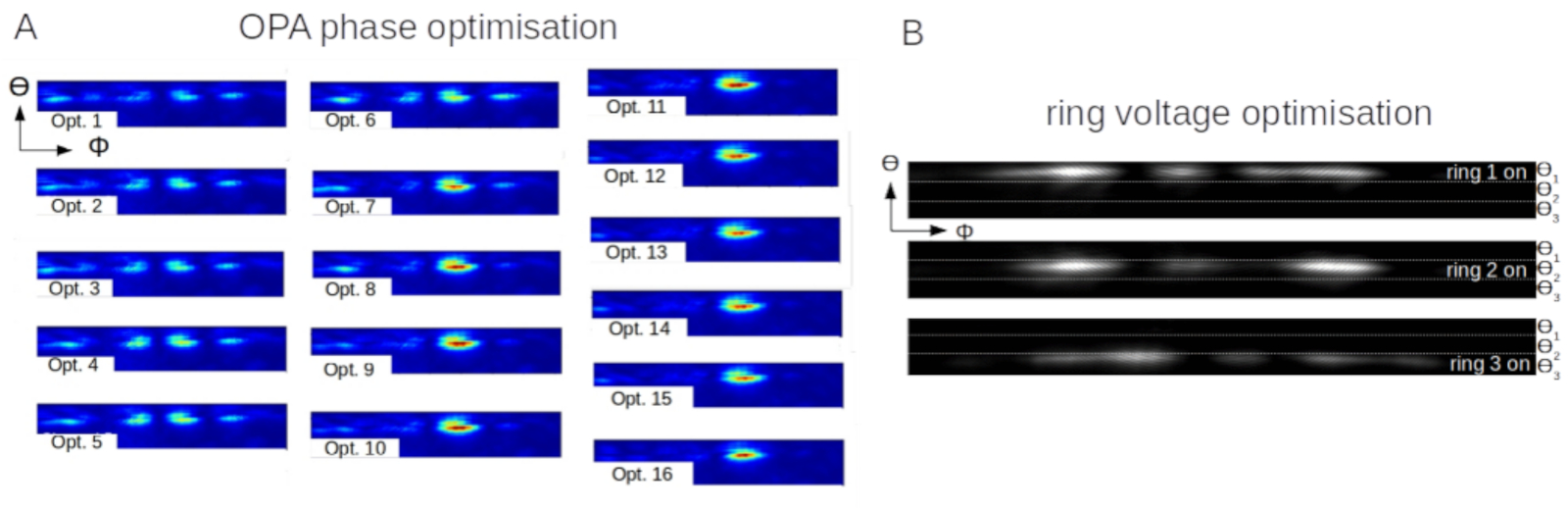
OPA 출력 패턴에서 명확한 간섭 최대를 관찰하기 위해서는 OPA 채널 간의 선형 위상 차이가 필요합니다. 그러나 입력과 출력 격자 사이의 도파관 길이가 채널마다 달라지면 간섭 패턴은 격자 방향(즉, 각도 φ)에 수직인 방향으로 직선을 따라 여러 개의 불규칙한 간섭 섹션을 표시합니다. 이러한 출력 패턴의 예는 그림 6A의왼쪽 상단 이미지에 제공됩니다. 입력 과 출력 격자 사이의 불균일 한 도파관 길이를 가진 16 채널 OPA의 원거리 출력을 보여줍니다. 다행히도 이 OPA 설계에는 위상을 개별적으로 조정하고 출력 빔 모양을 조정할 수 있도록 모든 채널에 위상 시프터가 포함되어 있습니다. 프로토콜 섹션 3.3에 설명된 대로 위상을 최적화한 후, 출력 빔은 하나의 명확한 최대를 형성한다. 그림 6A는 최적화 프로세스 중에 출력 빔이 어떻게 진화하는지 보여줍니다. 추가 간섭 최대는 센서 영역 외부에 있습니다. 또한, 우리는 16 채널 OPA의 빔 발산이 도 5B에서볼 수있는 것보다 훨씬 더 넓은 것을 관찰한다. 이 효과는 예상되며 채널 수가 크게 감소했기 때문입니다.
이하에서, 2차원으로 OPA 조향을 위한 광학 회로의 작동에 대해 논의할 것이며, 회로에 대한 자세한 내용은 도 2를참조한다. 첫째, 스위칭 네트워크의 링 전압은 각각 OPA를 포함하는 다른 서브 회로로 빛을 라우팅하기 위해 보정되었다. 4개의 OPA는 각각 상이한 격자 주기를 포함하기 때문에, 서브 회로 사이의 빛을 라우팅하면 출력 빔이 서로 다른 θ 각도에서 방출됩니다. 이는 도 6B에도시되어 있는데, 이는 스위칭 네트워크의 링 공진기를 사용하여 광경로가 변경됨에 따라 기록된 원거리 이미지를 포함하고 있다. 이미지는 '평행' 방출 각도, θ, 각 개별 공진기가 입력 라이트와 공진에 설정될 때 변경되고 다른 공진기를 오프 공진으로 튜닝한다는 것을 보여줍니다. 우리의 회로는 4개의 다른 θ 각도에 접근하도록 설계되었지만, 스위칭 네트워크의 설계 오류로 인해 링 공진기 3개만 작동할 수 있었습니다. 출력 이미지에서 간섭 패턴이 불규칙하고 명확한 최대치가 보이지 않는 것을 볼 수 있습니다. 출력 빔을 '수직' 방출 각도, φ로 조향하고 형성하기 위해 OPA 위상을 조정하고 최적화했습니다.
2차원 빔 스티어링 회로의 최적화된 출력 빔의 예상은 도 7A에도시되어 있다. 2개의 간섭 최대는 주요 로브 및 측엽 중 하나에 대응하는 명확하게 보입니다. 그림7A의 위이미지는 센서에서 픽셀 수와 비교하여 기록된 밝기의 히트 맵을 보여줍니다. 출력 각도를 결정하기 위해, 이미지는 프로토콜의 섹션 4.2에 기재된 바와 같이 처리되었고 픽셀 수와 출력 각도 사이의 관계가 결정되었다. 빔 강도 대 각도의 보정된 이미지는 그림 7A의가장 맨 아래 이미지에 표시됩니다.
다음에서, 빔 스티어링 결과에 대해 논의할 것이다. OPA 빔은 17.6° × 3° (φ × θ)의 영역에서 성공적으로 조향되었으며, 실시 예 데이터는 도 7B 및 도 7C에도시되어 있습니다. 그림 7B는 8°에서 θ 상수를 유지하면서 φ로 조향되는 빔의 이미지를 보여줍니다. 이것은 먼저 θ = 8°의 병렬 방출 각도에 대응하는 OPA에 접근하고 이어서 수직 방출 각도를 변경하기 위해 광학 상을 변화시킴으로써 달성되었으며, φ. 기본 빔의 정규화 된 강도 플롯은 θ의세 가지 다른 출력 위치로 조종되어 도 7C에도시되어 있으며, φ = -2.5 ° 및 θ 사이 의 고정 수직 방출 각도와 함께 7° 및 θ 사이를 변화시켰다. 이전과 같이, 병렬 방출 각 θ는 OPA 사이를 전환하기 위해 링 공진기 네트워크를 사용하여 제어되었다. OPA 를 선택한 후 OPA 단계는 φ = -2.5°에서 방출하도록 최적화되었습니다.
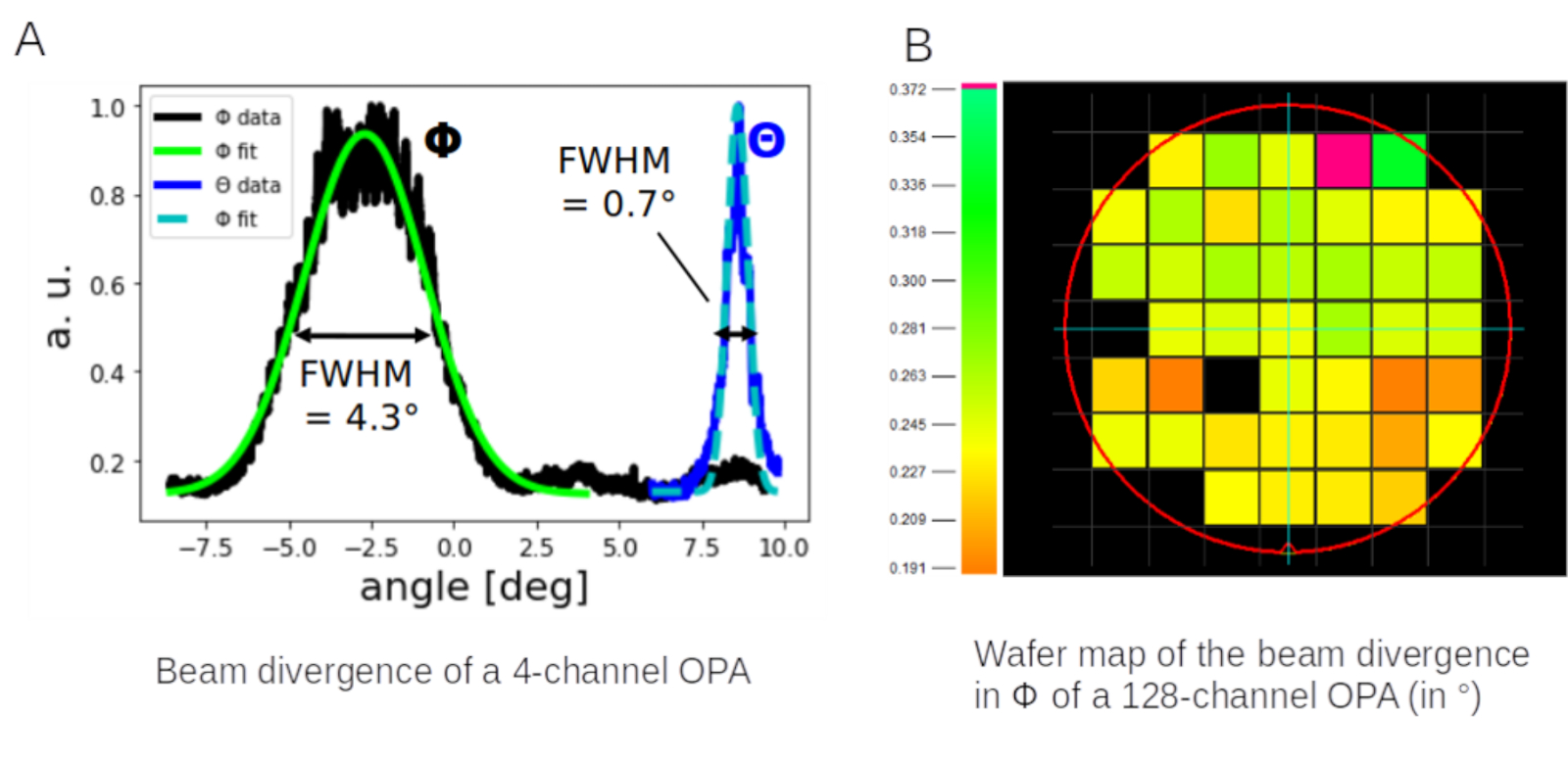
마지막으로, 빔 발산은 프로토콜 섹션 4.3에 설명된 바와 같이 φ 및 θ를 따라 두 개의 가우시안 곡선을 피팅하여 결정되었다. FWHM은 빔 발산에 대한 측정의 역할을 하며 φ = -2.5° 및 θ = 8°의 방출 각도에 대해 φ에서 4.3°및 0.7°로 측정되었으며, 도8A를참조하십시오. 이러한 값은 프로토콜의 섹션 4.3.3 및 4.3.4에 설명된 대로 4채널 OPA에 대해 각각 φ 및 θ에서 4.3° 및 0.6°의 예상 값과 양호합니다. 4채널 OPA의 차이를 결정하는 것 외에도 훨씬 많은 수의 채널을 통해 OPA 설계의 차이를 조사했습니다. 도 5A에도시된 것과 유사한 설계를 가진 128개의 채널로 구성된 패시브 OPA의 발산을 측정했다. 웨이퍼 전반에 걸친 제작 변형을 테스트하기 위해 동일한 설계로 42대의 장치를 특성화하는 자동 스캔을 시작했습니다. 기록된 이미지는 빔 발산에 대하여 분석되었다. 웨이퍼에 있는 장치의 φ대 위치의 차이는 도 8B에나와 있습니다. 측정값은 0.19°에서 0.37°사이이며 예상 값인 0.14°보다 약간 큽합니다. 이는 개별 OPA 채널 내부의 위상 오류로 설명될 수 있습니다. 설계의 모든 도파관은 길이가 동일하므로 이론적으로 OPA 채널 간에 위상 차이가 발생하지 않습니다. 그러나 제작 오류로 인해 빛이 입력에서 출력 격자로 이동함에 따라 제어되지 않는 위상이 이동하여 출력 빔이 넓어집니다. 회로에 위상 시프터가 없기 때문에 이러한 오류를 보정할 수 없었습니다. 언급했듯이, θ 각도는 안테나 격자 형상에 의해 정의됩니다. 따라서, 제조 변동(SiN 필름 높이 및 구조물 측면 치수 편차)은 OPA 출력 각도, θ에 영향을 미칠 수 있다. 이러한 변화는 전체 웨이퍼에 걸쳐 40 개의 장치에 특징이있다. 매우 잘 제어된 CMOS 제조 공정 덕분에 0.156°의 무시할 수 있는 3σ(표준 편차의 3배)가 발견되었습니다.

그림 1: 통합 OPA 의 그림. (A)OPA 출력의 1차 간섭 로브는 각각 격자의 배향에 수직 및 평행, 칩 평면, φ 및 θ의 직교 투영에 2개의 azimuthal 각도로 회로를 떠난다. (B)주요 구성 요소를 보여주는 OPA의 맨 위 보기입니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

도 2: 2차원 빔 스티어링을 위한 집적 광학 회로의 개략적 및 현미경 이미지. (A)4개의 서브 회로에 연결된 스위칭 네트워크를 포함하는 회로, 각각 OPA를 형성한다. 출력 영역에는 4개의 서로 다른 격자 주기가 있는 4개의 OPA가 포함되어 있으며, 따라서Θ.(B)SiN 도파관 및 Ti/TiN 열상 시프터를 사용하여 제작된 회로의 현미경이미지(A)가있습니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 3: 0mW에서 200mW 사이의 전력을 적용하는 전기 회로. 이 회로도는 광학 회로의 위상 변속기에 개별적으로 전압을 적용하고 전압 적용 후 전류를 판독할 수 있는 전기 회로를 나타냅니다. 광학 회로에서 위상 시프터는 1.3kΩ의 저항을 가진 전선으로 구성됩니다. π의 광학 위상 이동을 달성하려면 90mW의 전력이 필요합니다. 회로는 아두 이노 마이크로 컨트롤러를 통해 제어됩니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 4: OPA 회로 특성화를 위한 실험 적 설정. (A)실험 설정의 개략적. (B)실험 사진. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 5: 출력 빔의 근거리 및 원거리 필드 이미지. (A)OPA 회로의 근거리 이미지입니다. 905 nm의 파장에서의 빛은 섬유 및 입력 격자를 통해 회로내로 결합된다. 도파관 내부의 빛의 산란은 우리가 회로 디자인을 볼 수 있습니다. MMI 트리의 끝에서 OPA 격자에서 빛이 방출됩니다. (B)(A)에표시된 회로의 출력의 원거리 필드 이미지입니다. 센서에 두 개의 간섭 최대가 표시됩니다. OPA 이론에 따르면, 최대는 17.6 °로 구분됩니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 6: OPA 빔 최적화 및 스위칭 네트워크 작동. (A)위상 변속기를 사용하여 16채널 OPA의 OPA 빔 최적화. 각 최적화 단계 후에 원거리 이미지가 표시됩니다. 16개 채널을 모두 최적화한 후 빔은 센서 영역 내부에서 하나의 주 간섭 최대를 형성합니다. (b)링 공진기로 구성된 스위칭 네트워크를 이용하여, 상이한 격자 기간을 포함하는 상이한 OPA가 각각 액세스된다. 격자 주기가 다르면 출력 빔이 서로 다른 θ 각도에서 방출됩니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 7: 2차원 빔 스티어링 회로의 특성화. (A)기록된 이미지 데이터의 각도 변환으로 픽셀을 변환합니다. 빔 조향 결과는 φ와 θ로 각각(B)및(C)에도시되어 있다. 이 그림은 타일러 외16에서수정되었습니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 8: OPA 빔 발산 측정. (A)4채널 OPA의 빔 발산 분석. 이 그림은 타일러 외16에서수정되었습니다. (B)128 채널 OPA 설계의 φ로 측정 된 발산의 웨이퍼맵. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
토론
우리는 통합 OPA를 특성화하는 방법을 제시했다. 이 방법의 주요 장점은 웨이퍼에서 여러 개의 다이를 쉽게 프로브하고 제작 변형을 찾고 고성능 장치를 식별할 수 있다는 것입니다. 이는 그림 8B에서볼 수 있습니다. 웨이퍼 스캔에서 웨이퍼의 하반부는 빔 이견이 낮은 장치를 나타낸다는 것이 분명해집니다. 이는 해당 영역에서 더 높은 도파관 품질로 설명될 수 있으며, 이는 임의상 이동을 감소시키고 따라서 빔 발산을 감소시킵니다.
대면적 CCD 센서를 사용하여 원거리 장전 출력을 이미지화하는 것은 집적 회로의 여유 공간 출력을 이미지화하는 편리한 방법이며, 대부분의 특성화 설정에 쉽게 추가할 수 있기 때문에 자주 사용되는 푸피에 이미징 시스템6과비교하여 컴팩트한 크기로 인해 대부분의 특성화 설정에 쉽게 추가할 수 있다.
빔 각도와 발산 측정의 높은 정확도를 보장하기 위해, 특별한주의는 카메라 동안 주의해야합니다 - OPA 정렬. 또한 OPA 반응은 교정 중 위상 및 편광 불안정에 민감합니다. 따라서 사출 섬유의 움직임 / 진동, 레이저 온도, 들어오는 광 편광 등 모든 섭동 소스를 제어해야합니다.
요약하면, 통합 OPA를 특성화하는 방법이 제시되었다. 빛을 결합하는 방법, 회로의 위상 변속기를 제어하는 방법 및 근거리에서 출력을 이미지화하는 방법에 대한 세부 정보가 제공되었습니다. 근적외선에서 단일 파장에서 2차원 빔 조향 결과를 포함하여 여러 OPA 회로의 출력 빔의 일반적인 이미지가 표시되었다. 또한, 우리는 빔 발산의 관점에서 웨이퍼에 걸쳐 동일한 디자인으로 여러 장치를 측정의 결과를 보여줍니다. 웨이퍼의 위치에 대한 성능 추세가 발견되어 고품질의 제조 특성을 가진 영역을 식별했습니다.
공개
저자는 공개 할 것이 없다.
감사의 말
이 작품은 DEMO3S 프로젝트를 통해 프랑스 방향 제네랄 데 엔트레프레이즈 (DGE)에 의해 투자되었다.
자료
| Name | Company | Catalog Number | Comments |
| 25 ch electrical Probe | Cascade Microtech | InfinityQuad 25ch | |
| 35 mm CCD sensor | Allied Vision | Prosilica GT 6600 | |
| Arduino uno | Arduino | A100066 | |
| laser | Qphotonics | QFLD-905-10S | |
| optical fibre | Corning | HI780 | |
| polarization controller | ThorLabs | FPC023 | |
| prober station | Cascade Microtech | Elite 300 |
참고문헌
- Heck, M. J. Highly integrated optical phased arrays: Photonic integrated circuits for optical beam shaping and beam steering. Nanophotonics. 6 (1), 93-107 (2017).
- Vasey, F., Reinhart, F. K., Houdré, R., Stauffer, J. M. Spatial optical beam steering with an AlGaAs integrated phased array. Applied Optics. 32 (18), 3220-3232 (1993).
- Van Acoleyen, K., et al. Off-chip beam steering with a one-dimensional optical phased array on silicon-on-insulator. Optics Letters. 34 (9), 1477-1479 (2009).
- Guo, W., et al. Two dimensional optical beam steering with InP-based photonic integrated circuits. IEEE Journal of Selected Topics in Quantum Electronics. 19 (4), 6100212 (2013).
- Jalali, B., Fathpour, S. Silicon photonics. Journal of Lightwave Technology. 24 (12), 4600-4615 (2006).
- Hulme, J. C. Fully integrated hybrid silicon two dimensional beam scanner. Optics Express. 23 (5), 5861-5874 (2015).
- Chung, S., Abediasl, H., Hashemi, H. A monolithically integrated large-scale optical phased array in silicon-on-insulator CMOS. IEEE Journal of Solid-State Circuits. 53 (1), 275-296 (2018).
- Poulton, C. V., et al. Large-scale silicon nitride nanophotonic phased arrays at infrared and visible wavelengths. Optics Letters. 42 (1), 21-24 (2017).
- Poulton, C. V., et al. Coherent solid-state LIDAR with silicon photonic optical phased arrays. Optics Letters. 42 (20), 4091-4094 (2017).
- Martin, A., et al. Photonic integrated circuit based FMCW coherent LiDAR. Journal of Lightwave Technology. 36 (19), 4640-4645 (2018).
- Subramanian, A. Z., et al. Low-Loss Single mode PECVD Silicon Nitride Photonic Wire Waveguides for 532-900 nm Wavelength Window Fabricated Within a CMOS Pilot Line. IEEE Photonics Journal. 5 (6), 2202809 (2013).
- Baets, R., et al. Silicon Photonics: silicon nitride versus silicon-on-insulator. Optical Fiber Communication Conference, OSA Technical Digest (online) (Optical Society of America). , (2016).
- Sabouri, S., Jamshidi, K. Design Considerations of Silicon Nitride Optical Phased Array for Visible Light Communications. IEEE Journal of Selected Topics in Quantum Electronics. 24 (6), (2018).
- Zadka, M., et al. On-chip platform for a phased array with minimal beam divergence and wide field-of-view. Optics Express. 26 (3), 2528-2534 (2018).
- Tyler, N. A., et al. SiN Integrated Photonics for near-infrared LIDAR. 2018 IEEE CPMT Symposium Japan (ICSJ). , 63-66 (2018).
- Tyler, N. A., et al. SiN integrated optical phased arrays for 2-dimensional beam steering at a single near-infrared wavelength. Optics Express. 27 (4), 5851-5858 (2019).
재인쇄 및 허가
JoVE'article의 텍스트 или 그림을 다시 사용하시려면 허가 살펴보기
허가 살펴보기This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. 판권 소유