
Method Article
评估虚拟空间中的人类空间导航及其对运动的敏感性
摘要
在这里,我们提出了一个新颖、简短和积极的空间导航任务,该任务评估了空间导航和情景记忆能力。重要的是,空间导航和情景记忆是相互关联的,这项任务表明了对运动的敏感性。
摘要
空间导航 (SN) 是在环境中移动的能力,它需要了解一个人在时间和空间中的位置。众所周知,这种能力依赖于海马体内位置细胞的顺序发射。SN 是一个需要研究的重要行为,因为这个过程会随着年龄的增长而恶化,尤其是在神经退行性疾病中。然而,由于缺乏复杂的行为技术来评估这种海马依赖性任务,SN 的研究受到限制。因此,该协议的目标是开发一种新颖的、真实世界的方法来研究人类的 SN。具体来说,使用跨平台游戏引擎开发了一个活动的虚拟SN任务。在编码阶段,参与者在虚拟城市中导航以找到地标。在记忆阶段,参与者记住这些奖励位置的位置,并将物品运送到这些位置。捕获了找到每个位置的时间,并通过自由回忆阶段评估了情景记忆,包括地点、顺序、项目和关联的各个方面。运动行为(x、y 和 z 坐标)是通过游戏引擎中可用的资产进行评估的。重要的是,这项任务的结果表明,它准确地捕捉了空间学习和记忆能力以及情景记忆。此外,研究结果表明,这项任务对运动很敏感,运动可以改善海马体功能。总体而言,这些发现提出了一种追踪人类海马体功能的新方法,这种行为对身体活动训练范式很敏感。
引言
在时间和空间中移动身体对于学习和记住有关环境的信息至关重要。这种能力被称为空间导航,从进化上讲,它是在环境中定位食物、水、社会对应物和其他奖励的重要生存工具1,2。空间导航依赖于海马体,海马体是内侧颞叶的 C 形边缘系统结构。海马体由 CA1、CA2、CA3 和齿状回亚区组成。海马体支持记忆的编码、整合和检索,这些记忆有助于定义意识体验。具体来说,空间导航支持情景记忆,这是一种外显记忆形式,指的是个人经历的记忆,包括时间、地点以及与经历相关的相关细节(例如,景象、声音、气味、情绪)。当我们在空间上穿越不同的环境时,被称为位置细胞的神经元会系统地发射,使我们能够了解我们在时间和空间中的位置。事实上,对这些神经元的直接光刺激已被证明可以使啮齿动物的行为偏向于它们的物理位置(即位置场)3。
传统上,评估啮齿动物的空间导航是通过莫里斯水迷宫、Y 迷宫、T 迷宫和径向臂迷宫等行为范式来研究的 4,5。重要的是,这些行为任务允许使用电生理深度记录等技术对空间导航的神经相关性进行体内研究。然而,评估人类的空间导航已被证明在科学上具有挑战性,因为大多数科学研究都是在实验室中进行的,而不是在现实世界中进行的。以前对人类的研究已经通过传统的基于纸张的任务来评估空间能力,例如双向地图学习任务,心理旋转任务或空间记忆任务6,7。其他人则利用了基于计算机的任务,例如虚拟莫里斯水任务或其他虚拟迷宫任务,这些任务已被证明与更传统的空间能力心理测量相关8,9。此外,随着公开可用和免费视频游戏软件包的可访问性,研究人员已开始开发可以在计算机屏幕上或虚拟现实中呈现的 3D 虚拟环境 10,11,12,13,14,15.移动脑体成像(MoBI)的科学进步也使研究人员能够开始探索现实世界环境中的空间导航16,17,18。
重要的是,空间学习和记忆是一种随着年龄增长而退化的认知能力,老年人更有可能忘记自己的位置或在试图回家时迷路。这种缺陷很可能是由于发生在海马体水平的神经退行性变造成的,海马体是一个高度可塑的大脑区域,是19岁时最先恶化的区域之一。因此,开发真实世界的方法来评估空间导航和情景记忆能力是研究的重要途径。在临床水平上,这些类型的任务可能有助于确定记忆力下降的进展或诊断轻度认知障碍、阿尔茨海默病或其他形式的痴呆。相反,身体活动已被确定为提高空间导航能力的最佳机制之一。对啮齿动物的研究表明,运动可以增强各种空间任务的学习和记忆,包括莫里斯水迷宫、Y 迷宫、T 迷宫和桡臂迷宫20。运动引起的空间能力改善也已在人类中得到证实,这种效果与海马体积的增加显着相关7.然而,这种行为效应是通过空间记忆任务来证明的,该任务要求参与者记住屏幕上点的位置 - 这项任务可能对现实世界的空间导航没有多大的生态有效性。很少有研究调查过人类运动对虚拟环境中呈现的空间导航任务的影响。
因此,设计了一项认知任务来评估空间学习和记忆以及使用虚拟环境的情景记忆。重要的是,该任务是使用现代视频游戏软件设计的,以实现最新的图形设计和逼真的功能(例如,天空中移动的云朵)。这项任务在一组健康成年人进行长期有氧运动练习之前和之后进行了测试。结果表明,参与者可以编码和记住空间信息以及有关其虚拟体验的情景记忆。此外,研究结果表明,这项任务的表现是可塑的,会受到锻炼的影响。
具体来说,通过跨平台游戏引擎21 开发了一个虚拟环境,该引擎评估了空间导航和情景记忆能力,这是海马体支持的独特认知技能。用于此环境的地图源自 Miller et al. (2013)22。所使用的游戏引擎允许开发人员下载资产以添加独特的功能,以构建虚拟环境。利用资产23 ,使我们能够构建一个逼真的城市环境,其中包括参与者可以通过的道路和建筑物进行导航。此外,还使用了资产24 ,允许跟踪参与者在虚拟环境中移动时的 x、y 和 z 坐标和旋转。上述资产允许在毫秒时间尺度(~33 毫秒)上记录这些特征。然后,将虚拟环境编译并作为空间导航任务进行管理,参与者可以在家中的笔记本电脑或台式计算机上完成该任务。以下协议详细介绍了如何管理和参与此空间导航任务。
研究方案
所有研究文件和数据收集方法均得到纽约大学人类受试者活动委员会的批准并符合其要求。参与者在参加任何与研究相关的活动之前给予了知情同意。
1. 设置游戏玩法
- 从以下公共存储库下载必要的文件:https://github.com/embodiedbrainlab/BassoSpatialNavigationTask
- 从 unity.com/download 下载 Unity Hub 并安装 Unity 版本 5.3.1f1。
- 在 Unity 上将步骤 1.1 中从存储库下载的文件作为 项目 打开。
- 使用下载的文件创建项目后,选择窗口顶部的“ 文件 ”选项卡,然后选择“ 生成并运行”。
- “ Build Settings”(构建设置 )窗口将首先出现。选择 SpatialNavigation > Scenes > Big City B lures 和 scenes/LeFin。选择 PC、Mac 和 Linux Standalone ,然后单击 Build and Run 按钮。
注意:将出现一个窗口,要求研究人员保存.exe(应用程序)文件。一旦研究人员构建了应用程序,他们就可以双击该应用程序以运行该协议的未来迭代。如果研究人员决定运行此文件,则其各自的结果将保存在应用程序所在的同一目录中。 - 将出现一个标题为 “SpatialNavWeb 配置” 的窗口。在 “图形 ”选项卡下调整屏幕分辨率和图形质量。在 “输入 ”选项卡下更改游戏的控件。
- 点击 播放! 开始空间导航任务。
2. 在空间导航任务期间用脑电图 (EEG) 记录大脑活动
注意:脑电图通过放置在头皮上的电极,在毫秒的时间尺度上以微伏为单位测量人脑皮层中神经元的活动。脑电图是一种非侵入性形式的脑成像,允许参与者在进行其他活动(例如在虚拟环境中导航)时扫描他们的大脑。
- 使用卷尺从头到头测量参与者的头部,以确保脑电图帽的正确安装。
- 将电极放入脑电图帽中(如有必要),并为参与者配备脑电图帽,确保正确安装和放置(图1A)。
- 启动脑电图软件。用电极凝胶填充每个电极,以确保阻抗测量值低于 25 kΩ。
- 一旦脑电图信号看起来干净并且没有明显的伪影,就开始记录。
- 让研究团队的一名成员在参与者执行以下步骤时观察参与者。
- 在以下每个事件中向脑电图记录系统发送触发脉冲(图1B)
编码阶段的开始
编码阶段结束
记忆阶段的开始
记忆阶段结束
情景记忆阶段的开始
情景记忆阶段结束
研究人员认为感兴趣的任何其他事件

图 1:空间导航游戏过程中的脑电图记录。 (A) 配备移动脑电图 (EEG) 设备的人在执行空间导航任务时的图像。(B) 编码阶段、(C) 记忆阶段和 (D) 情景记忆阶段期间 θ 活动 (4-8 Hz) 的功率谱密度图。所有数据均经过预处理,并通过频率 (uV2/Hz) 对功率进行归一化。 请点击这里查看此图的较大版本.
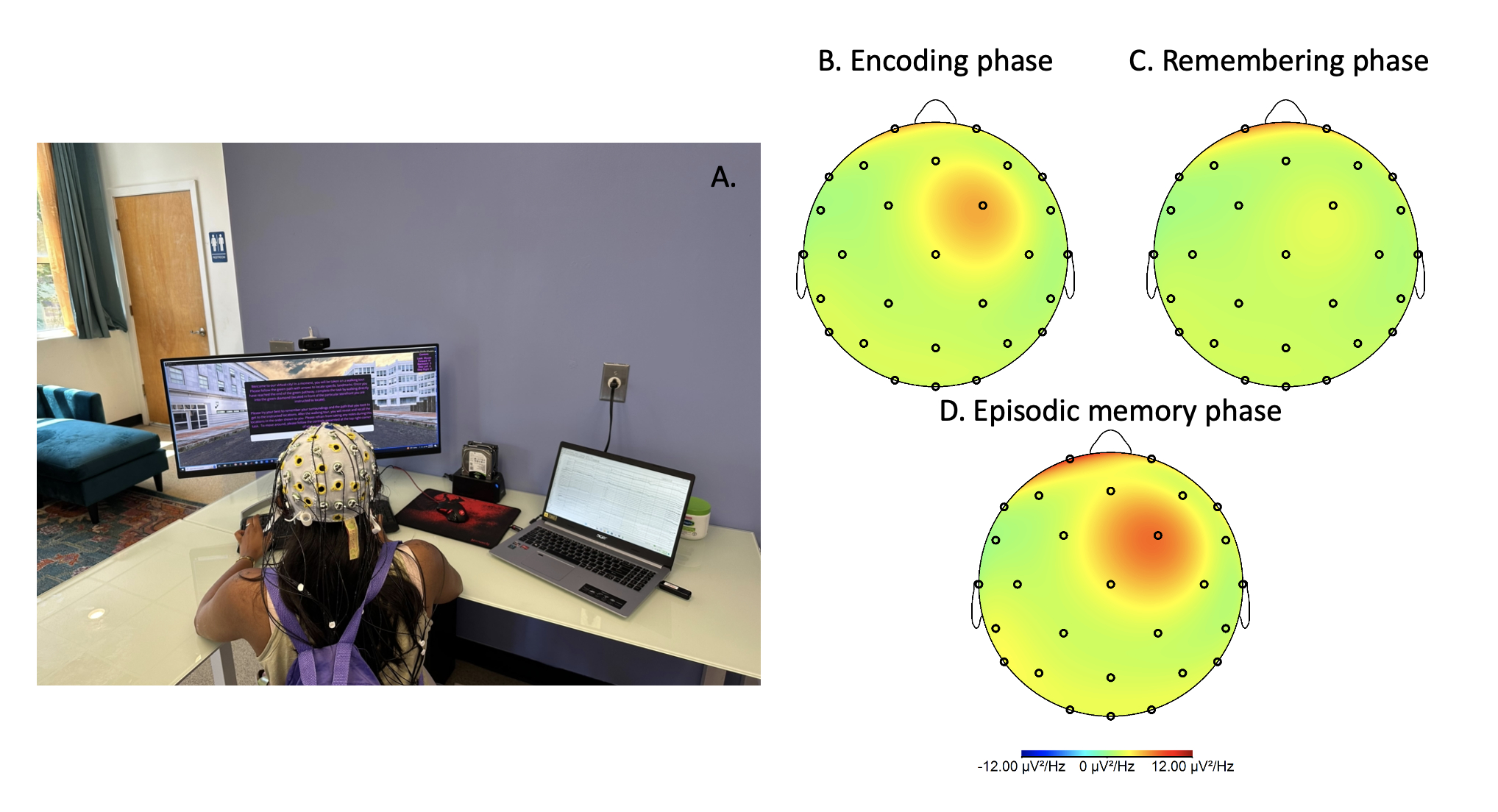{kind=link}
注意:使用Arduino技术的研究人员还可以在EEG记录和游戏引擎环境之间发送同步触发器,以便在毫秒的时间尺度上实现神经生理和行为数据之间的精确配对。有了这些标记,研究人员将能够回顾参与者在与虚拟环境进行关键交互之前、期间和之后的大脑活动。研究人员还可以考虑在与虚拟环境互动之前和/或之后进行一段时间的基线大脑活动,以便以后进行比较。
3. 空间导航任务说明(图2)
- 说明:确保参与者舒适地坐着,最好是双脚放在地板上。让参与者阅读屏幕上的说明,这将要求他们访问城市景观中的特定地标,同时尝试记住他们的周围环境和他们所走的路径(图2A)。
- 确保参与者面向鼠标和键盘。指导参与者使用鼠标并左键单击以开始任务(图 2A)。
- 确保参与者了解他们需要使用键盘上的 W、 A、 S 和 D 键在环境中导航。 W 键将使它们向前移动,而 S 键将使它们向后移动。或者,向上和向下箭头也会将它们向前和向后移动。 A 键会将它们向左移动, D 键会将它们向右移动。
- 确保参与者知道他们可以使用计算机鼠标来移动受试者的视角,就像参与者在移动头部一样。参与者可以向上、向下、向左、向右看;无需单击鼠标即可移动他们的视角。
注意:有关导航虚拟环境的说明将显示在参与者屏幕的右上角(图 2A-F)。

图2:空间导航任务的图像。 在跨平台游戏引擎中开发的空间导航和情节记忆任务的屏幕截图。示例屏幕截图从左到右显示,从左上角开始:(A) 总体说明;(二)编码阶段的出差情况;(三)在编码阶段定位店面;(四)编码阶段的旅行;(五)记忆阶段的说明;(六)交付部分的记忆阶段;(七)情景记忆阶段的说明;(H)情景记忆阶段;(I) 游戏结束。 请点击这里查看此图的较大版本.
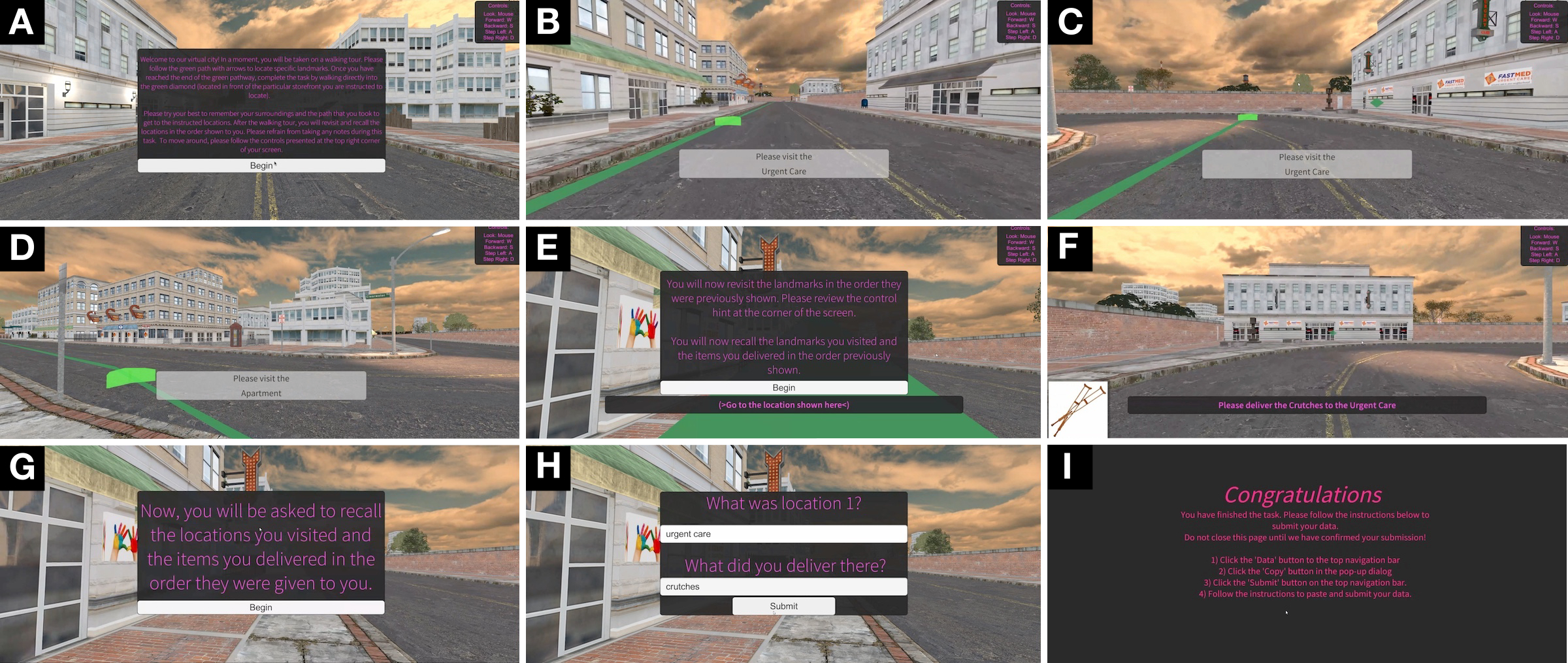{kind=link}
4. 空间导航任务的编码阶段
- 让参与者积极跟随带有绿色箭头的绿色路径(图 2B),让他们访问第一个地标(图 3)。
- 一旦参与者到达第一个地标,让参与者穿过该位置的绿色钻石(图 2C)。
- 一旦参与者收集到绿色钻石,就让参与者沿着绿色路径参观下一个地标。一旦参与者到达第二个地标,让参与者穿过该位置的绿色钻石。
- 让参与者继续执行此任务,直到参与者访问所有五个地标并收集所有五颗钻石(图 2D)。
注意:在此任务的整个编码阶段,参与者将被要求记住整个城市中五个地标的位置(图 3)。 图 4 显示了该任务的鸟瞰图。

图 3:店面的图片。 参与者参观了在环境中开发的 18 个地点中的 5 个,每个地点都有一个独特而详细的店面。这些地点的示例包括 (A) 披萨店、(B) 维生素店、(C) 家具店、(D) 婚纱店、(E) 售货亭和 (F) 赌场。 请点击这里查看此图的较大版本.
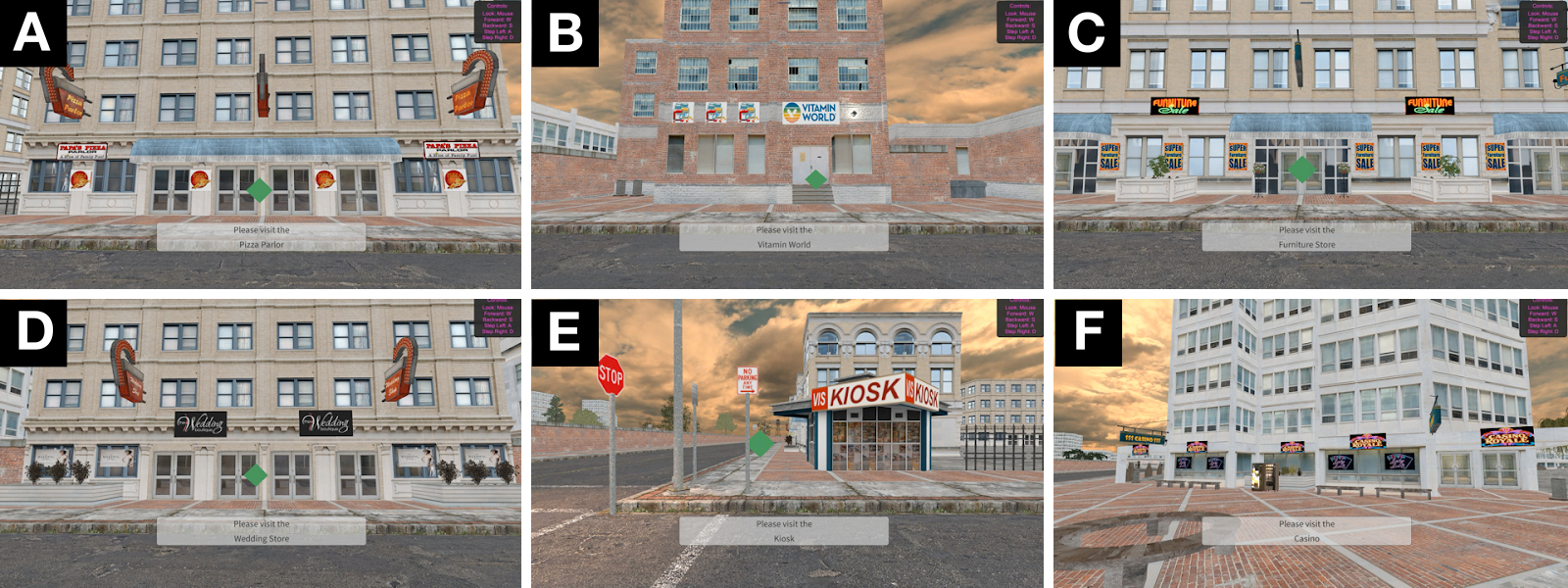{kind=link}

图 4:空间导航任务地图。 参与者导航的虚拟环境的鸟瞰图。 请点击这里查看此图的较大版本.
{kind=link}
5. 空间导航任务的记忆阶段
- 接下来,让参与者重新审视每个里程碑(即,记住阶段; 图2E)。
注意:参与者将从他们在编码阶段访问的最后一个位置开始记忆阶段。 - 让参与者使用鼠标左键单击 “开始 ”顶部(图2E)。
- 让参与者访问参与者在编码阶段访问的第一个地标。
- 让参与者将独特的物品“交付”到第一个地标。
注意:在任务的这一部分,不会提供绿色路径/箭头(图 2F)。 - 参与者交付物品后,让参与者导航到第二个地标并交付下一个独特的物品。让参与者继续执行此任务,直到参与者访问所有五个地标并交付所有五个项目。
注意:这部分任务将评估参与者的空间学习和记忆能力。为此,该程序将自动计算找到每个地标的时间、平均搜索时间和任务的总时间。
6. 空间导航任务的情景记忆阶段
注意:情景记忆测试将在记忆阶段完成后进行。
- 首先,让参与者使用鼠标左键单击 “开始 ”顶部(图2G)。
- 让参与者回忆起参与者访问过的地标和参与者交付的物品,按照记忆阶段早些时候的指示,按照指示(图2G)。让参与者使用计算机键盘输入响应(图2H)。
7. 完成任务
- 让参与者阅读最后的提示,以确认任务的完成和数据的提交(图2I)。
8. 资料收集与分析
- 行为数据
- 在应用程序的目录中找到 Results.csv 文件(例如,请参阅 补充文件 1 )。
注意:如果研究人员决定在 Unity 应用程序的 File 选项卡下单击 Build and Run,则结果文件将保存在下载的 BassoSpatialNavigationTask-main 文件夹中。如果研究人员通过双击构建的应用程序(步骤 1.5)来运行环境,则结果文件将与应用程序位于同一目录中。每次完成虚拟环境后,结果文件都会被覆盖。因此,建议在每次完成任务后提取这些结果,并将它们编译到一个单独的文件中,供多个参与者和试验使用。 - 确保数据干净且看起来合理。
- 利用 补充文件 2 计算适当的分数,包括开始时间、结束时间、平均搜索持续时间、地点分数、项目分数、订单分数、关联分数和情景记忆分数。
注意:具体来说,地点分数是通过计算正确调用的地标数量来计算的。订单分数是通过确定按正确顺序召回的地标数量来计算的。项目分数是通过计算正确召回的项目数量来计算的。关联分数是通过计算地点与项目的正确配对来计算的。最后,通过对地点、顺序、项目和关联分数相加来计算总体情景记忆分数。请注意,X/Z 坐标的原始输出不在正确的时间序列中。若要解决此问题,请将“ 时间 ”列中的数据从最小值到最大值进行排序。 - 将数据输入到所选的数据库中。
- 使用独立样本 t 检验、方差分析或其他适当的统计检验来分析数据。
- 在应用程序的目录中找到 Results.csv 文件(例如,请参阅 补充文件 1 )。
- 脑电图数据
- 使用预处理管道清理脑电图数据25.
- 使用适当的软件包,在参与者在虚拟环境中导航的长时间内对脑电图数据进行时频分析,例如在任务的编码和记忆阶段。
- 如果对参与者与虚拟环境交互的特定时间段感兴趣,请进行与事件相关的潜力分析。
- 进行与脑电图数据相关的统计分析,并考虑将行为数据与脑电图数据相关联。
结果
从编码角度看游戏玩法:在“编码”阶段,在三维空间周围放置了一系列18个航点,每个航点都有一个相关的“交付物品”(即要交付到该位置的物品)。对这些航点的引用存储在玩家控制器中,并在开始任务之前静态排序;也就是说,如果将披萨店放置在位置 1,它最初将始终位于位置 1。为了给参与者遇到的航点提供一定程度的随机性,航点列表通过Fisher-Yates洗牌算法进行了洗牌。在本研究中实现的 Fisher-Yates 洗牌会生成原始序列的伪随机排列。任何可能的排列都可以以相等的可能性生成。该算法首先从列表 (n) 的末尾选择一个元素。在 [0, n] 范围内生成一个伪随机数,并分配给值 k。然后将第 n个值与第 k 个值交换。接下来,将 n 的值减去 1,然后重复该过程,直到只有单个索引尚未考虑。
在对航点列表进行洗牌后,选择了前五个元素。通过游戏引擎的导航网格系统和内置的最优路径计算生成最优路径。这一系列路径从参与者的起始位置开始,并在每个航点之间创建了一个链接链,终止于最终航点。当参与者获得控制权时,他们被指示遵循这些路径,这些路径由一条绿线和一个移动箭头表示,这些箭头提供预期的方向信息。虽然提供了这条绿线和移动箭头,但参与者能够在整个虚拟环境中积极导航。当参与者进入航点的边界时,显示的路径将与列表中的下一个路径交换。
在访问了预期数量的航点元素后,参与者进入了“记住”阶段(在代码中称为 RevisitIntermission ),在那里他们被指示按照先前显示的顺序重新访问地标。当参与者试图重新访问导览期间呈现的地点时,他们看到了由航点相关的“交付项目”指定的图像。他们没有收到建议的路径。他们的运动是通过来自资产商店的对象运动跟踪器组件来跟踪的。
当参与者完成前往每个呈现的航点时,他们会收到指示,引导他们到下一个屏幕,以回忆他们访问过的地点以及交付给每个航点的物品。在回忆阶段,向参与者展示了一个带有两个文本条目的提示。第一个决定了参与者被要求前往的航点。第二个决定了与此航点关联的“交付项目”。记录了每个提示的响应和响应时间。
在任务结束时,数据被收集并以 JSON 表示形式存储。第一部分记录了重新访问阶段,参与者被要求在没有指导线帮助的情况下找到位置。记录的值包括航点名称、“交付物品”名称以及到达航点所需的时间。第二部分记录了在召回阶段提出的答复。本部分包括参与者对位置、“交付项目”的回答,以及对上述提示做出回应所花费的时间。所有代码都可以在 https://github.com/embodiedbrainlab/BassoSpatialNavigationTask 上找到并下载。
功效分析和统计:使用 G*Power 3.1 进行相关点双序列模型功效分析,使用双尾检验,效应大小为 0.3,alpha 水平为 0.05,功效为 0.8,确定样本量为 n = 8226。描述性统计用于评估参与者的年龄、骑行课程的数量和一般措施,包括空间导航和情景记忆能力。采用独立样本 t 检验检验实验组和对照组之间锻炼总数之间的显著差异。考虑到并非所有数据都是正态分布的,如Shapiro-Wilk检验(p<0.05)所评估的那样,我们利用非参数Spearman的rho相关系数来评估空间导航与情景记忆能力以及年龄和空间导航能力之间的关系。使用 alpha 值 0.05 来确定统计显着性。在适当的情况下,Bonferroni 校正被用于一系列统计检验。IBM SPSS Statistics Version 26 用于所有统计分析。Pearson 的乘积矩相关性用于评估骑行锻炼总数与空间导航能力之间的关系,因为这是 Basso 等人 (2022)27 进行的程序。
参与者: N = 130 名参与者是通过各种技术从德克萨斯州奥斯汀招募的,包括在线和传单广告。纳入标准包括以英语为主要语言,年龄在 25-55 岁之间(平均 30.16 ± 0.49)。此外,所有参与者都需要报告身体健康,并采取适度和规律的锻炼方案(定义为在过去 3 个月内每周锻炼一到两次,每次 20 分钟或更长时间)。排除标准包括目前是吸烟者或先前存在的身体健康状况使运动变得困难或不安全。排除标准还包括目前诊断和/或正在服用治疗精神或神经系统疾病的药物,包括焦虑症、抑郁症、双相情感障碍、精神分裂症或癫痫。
对于干预前的数据,n = 11 名参与者由于技术问题而丢失数据,n = 1 名参与者由于非任务依从性而被排除在外,总共剩下 n = 117 名参与者进行分析。在完成三个月锻炼方案的 n = 80 名参与者中,n = 11 名参与者没有完成最终的空间导航任务,总共剩下 n = 69 名参与者用于分析干预后和重复测量数据。这个较小的样本量被用来检查骑行次数与空间导航能力之间的关系。在干预过程中,对照组进行了 20.73 (± 0.72) 次锻炼,而实验组进行了 47.87 (± 2.24) 次锻炼,差异有统计学意义 (t[45.76] = -11.554,p < 0.001)。
一般度量及其关系:这项新的虚拟环境任务测量空间导航和情景记忆容量。在最初的干预前测试期间,该任务平均需要 318.69 (±21.56) 秒才能完成,五个站点的平均搜索时间为 82.88 (±5.19) 秒(图 5A);这些数据点代表空间导航能力(即空间学习和记忆)。此外,参与者能够对虚拟体验的地点、项目、顺序和关联方面进行编码,参与者在他们的环境中记住了 14.84 (±0.37) 种新体验(图 5B);这些数据点代表情景记忆能力。重要的是,总时间(图6A;r = -0.314,p<0.001)和平均寻找时间(图6B;r = -0.286,p<0.001)与情景记忆得分显著相关,表明空间导航能力与该任务中的情景记忆相关。

图 5:任务时间。 (A) 以平均搜索时间和总搜索时间(以秒为单位提供)表示的空间导航能力和 (B) 以地点、项目、顺序、关联和总体情景记忆分数表示的情景记忆能力的平均值 (± SEM)。 请点击这里查看此图的较大版本.
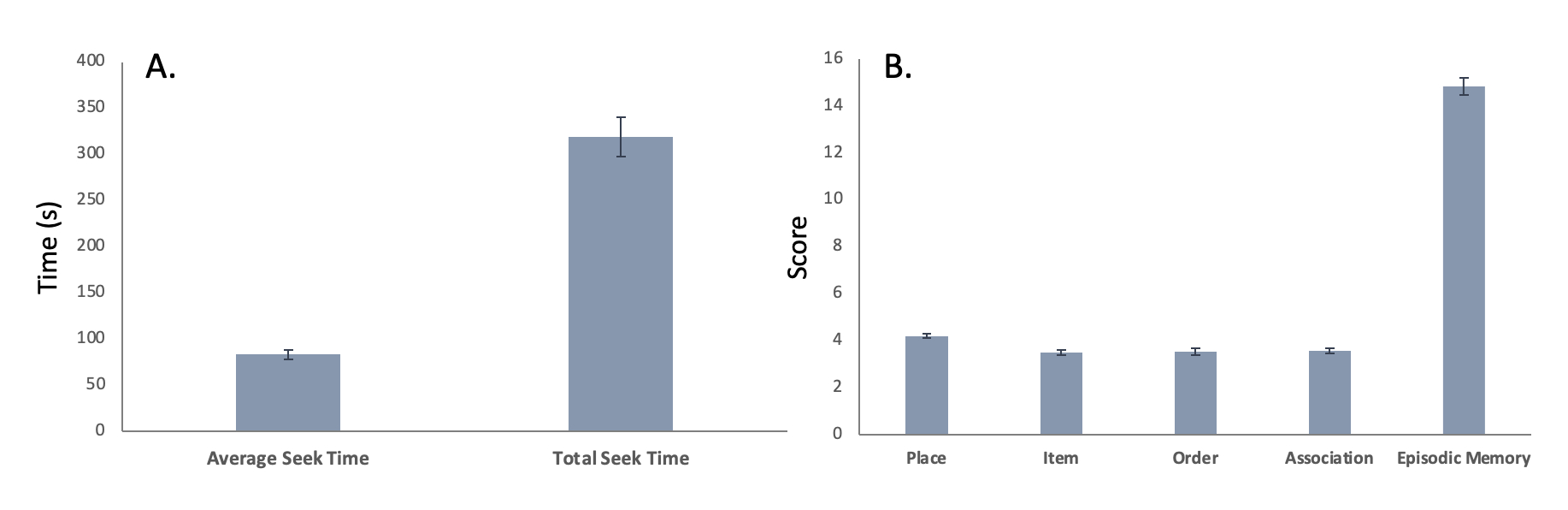{kind=link}

图 6:空间导航能力与情景记忆的关系。 由较短的 (A) 平均搜索时间和 (B) 总搜索时间表示的空间导航能力的提高与情景记忆分数表示的情景记忆增强有关。*第< 0.001。 请点击这里查看此图的较大版本.
{kind=link}
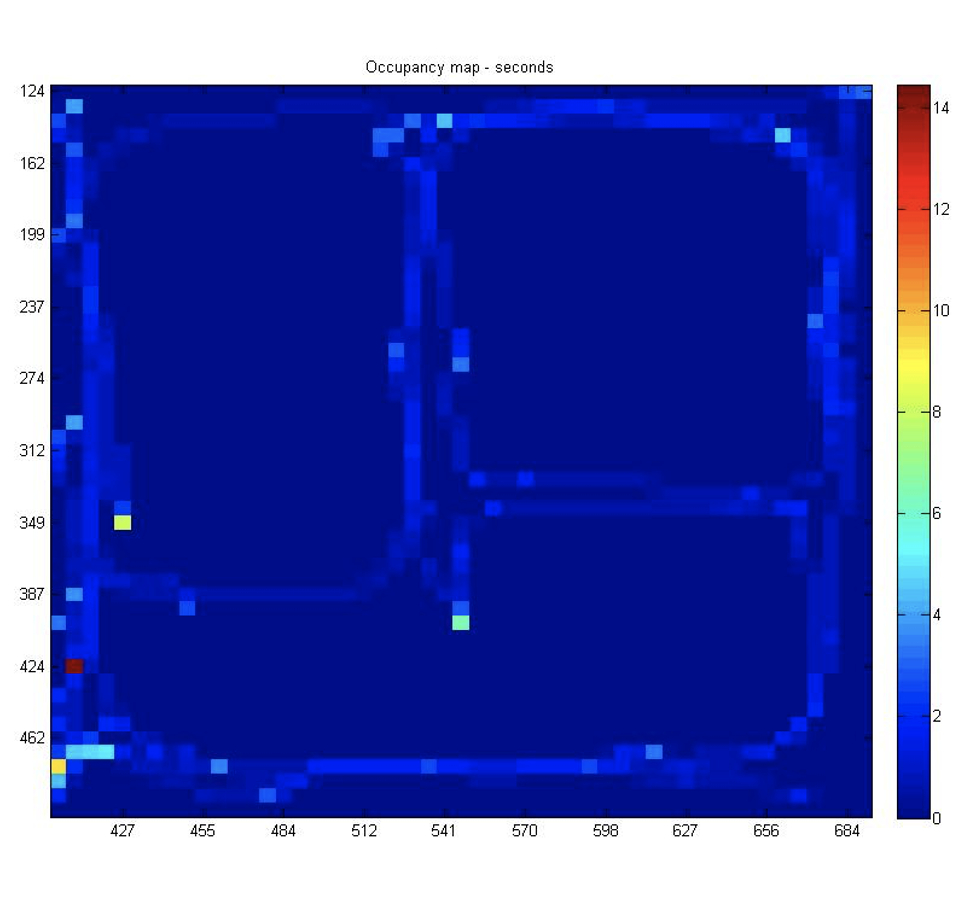
在虚拟空间中表示的 X 和 z 坐标: 使用对象运动跟踪器资产,在这个三维虚拟空间中跟踪 x 和 z 坐标(补充文件 1)。由于在此空间导航任务中未启用在游戏中上下移动(即跳跃),因此 y 坐标没有提供有用的信息。然而,x 和 z 坐标使我们能够评估参与者在整个游戏中的移动方式。基于这些数据,计算机代码被设计为直观地显示参与者在整个地图中旅行的位置的热图。 图 7 显示了一个代表性参与者的热图,其中突出显示了参与者在记忆阶段所走的路线。以黄色/红色突出显示的点对应于地图上的交付(即奖励)位置。

图 7:入住率热图。 显示参与者路线的占用热图。图表的黄色/红色部分表示参与者经常光顾的那些位置,并与空间导航任务中参与者必须交付物品的地方(即奖励位置)相对应。 请点击这里查看此图的较大版本.
{kind=link}
年龄与空间导航能力的关系: 初步研究表明,通过总搜索时间评估的空间导航能力与年龄显着相关(图8;r = 0.157,p = 0.045)。随着年龄的增长,空间导航能力会下降,总搜索时间的增加就是明证。然而,当应用Bonferroni校正时,在p = 0.025处评估两个相关性(即总搜索时间和平均搜索持续时间)的统计显着性,相关性不再显著。

图8:空间导航能力与年龄的关系。 当使用Bonferonni校正(p < 0.025)进行评估时,年龄与总搜索时间表示的空间导航能力没有显著相关性。 请点击这里查看此图的较大版本.
{kind=link}
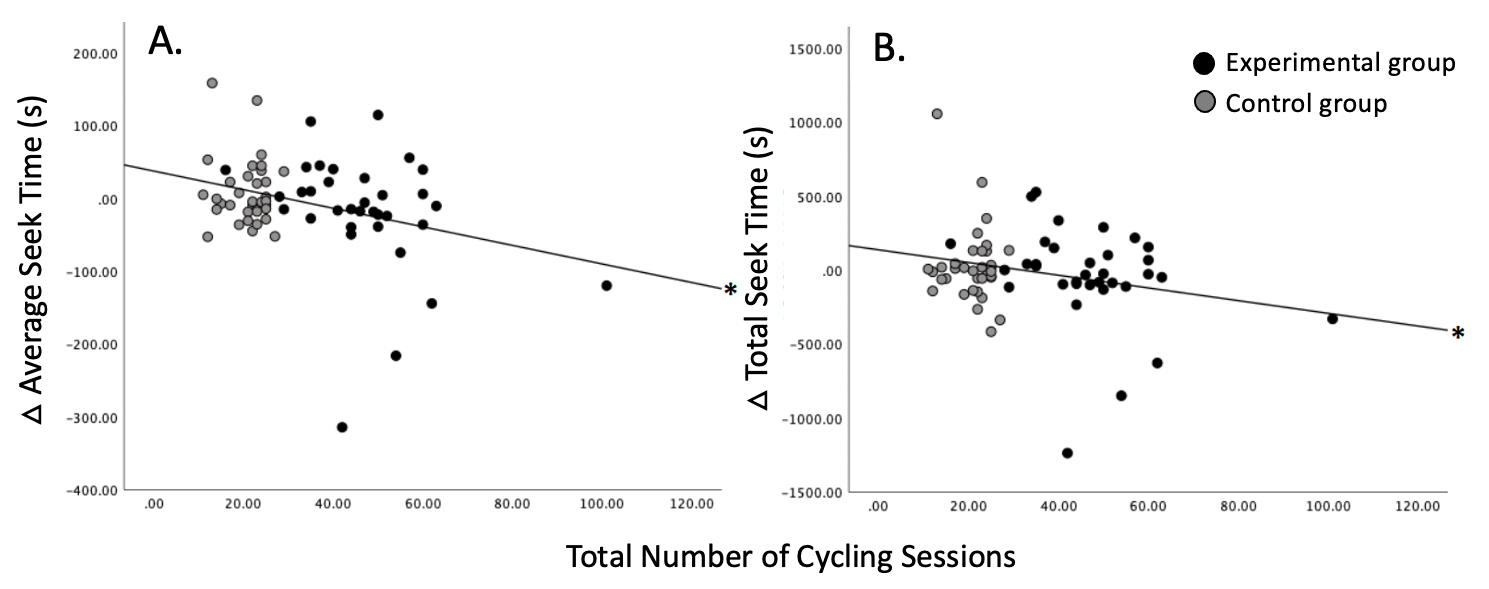
有氧运动训练与空间导航能力的关系: 有氧运动训练在室内自行车工作室28 进行。所有课程的持续时间为 45 分钟,包括在整个课程期间以中等至剧烈强度骑自行车。参与者接受了随机分配,以维持他们现有的锻炼方案或增加他们的锻炼方案。保持锻炼方案的参与者每周参加 1 到 2 节课,而增加锻炼方案的参与者每周参加 4 到 7 节课。参与者参与了他们指定的锻炼方案,为期 3 个月。在运动训练前后测试了空间导航和情景记忆能力。干预的更多细节可以在 Basso 等人 (2022)27 中找到。在三个月的过程中,骑行类别的总数与平均寻找持续时间(图9A;r = -0.321,p = 0.007)和总寻找时间(图9B;r = -0.242,p = 0.045)显着相关。然而,当应用Bonferroni校正时,在p = 0.025处评估两个相关性(即总寻道时间和平均寻道持续时间)的统计显着性时,总寻道时间的相关性不再显著。干预的其他发现可以在 Basso 等人 (2022)27 中找到。

图9:空间导航能力与锻炼的关系。 骑行次数的增加与空间导航能力的提高有关,如(A)平均寻道时间和(B)总寻道时间。*P < 0.05。该图经Basso等人许可修改过27。 请点击这里查看此图的较大版本.
{kind=link}
补充文件 1:原始数据 1. 原始数据,包括有关空间导航任务的记忆(重访)和情景记忆(回忆)阶段的信息。还介绍了在实验的编码和记忆阶段,参与者在三维虚拟空间中移动的 x 和 z 坐标的数据。 请点击这里下载此文件。
补充文件 2:原始数据 2. 带有计算的原始数据(以红色显示),用于确定开始时间、结束时间、平均搜索持续时间、地点分数、项目分数、订单分数、关联分数和情景记忆分数。 请点击这里下载此文件。
讨论
这项研究检验了一种新的虚拟现实任务在评估人类空间导航方面的有效性。这项认知任务只需大约 10 分钟即可完成,可用于评估两种独特的海马依赖性认知——空间导航和情景记忆能力。重要的是,空间导航能力与情景记忆能力显著相关。最后,这项任务对体育活动训练范式很敏感。也就是说,增加运动量与表现增加有关。这项任务的灵感来自Miller等人(2013)的工作,他们研究了耐药性癫痫患者的虚拟环境和为癫痫发作定位而放置的海马深度电极。他们发现,在空间导航任务的熟悉阶段(即编码阶段),海马体中的位置响应细胞和相关的内侧颞叶结构被激活22。此外,他们发现,当参与者参与自由回忆组件(即,不涉及主动导航的记忆阶段)时,在编码过程中活跃的相同位置响应细胞再次变得活跃。利用开阔场和迷宫状环境对啮齿动物的现有研究表明存在这种位置细胞,John O'Keefe、May-Britt Moser 和 Edvard Moser 博士因这一发现获得了 2014 年诺贝尔生理学或医学奖 2,29,30,31。此外,使用人类虚拟环境的研究表明,人类海马体中的相似细胞编码穿越时间和空间的旅行22,32,33。尽管该任务类似于Miller等人(2013)和其他人22,34,35,36,37,38中提出的任务,但它是使用最新的跨平台游戏引擎和技术开发的,利用了现实世界的特征,如移动的云和清晰的城市地标和店面特征。其他研究人员在人类中利用了其他空间导航任务;然而,这些任务的生态有效性有限。例如,虚拟 Starmaze 任务用于评估导航能力,但将参与者置于星形迷宫 39,40,41,42,43,44。此外,NavWell 是一个可访问的平台,它承载空间导航和记忆实验,类似于啮齿动物中的莫里斯水迷宫(将参与者置于圆形竞技场中),并为开发人员提供基本的几何形状来构建环境45。此外,跨平台游戏引擎上的地标资产可用于构建和开发存在于正方形环境中的空间导航任务12。当前任务的独特之处在于它为用户提供了类似于现实世界的设置和任务 - 导航城市景观并记住地标和动作。该任务也与虚拟的 Starmaze 任务和 NavWell 不同,因为它除了评估空间导航外,还评估情景记忆。
在这项任务中,空间导航能力与情景记忆能力显著相关。其他人则表明,这两种认知能力确实是不同的,它们依赖于海马体的不同区域38,46。流行的“认知地图理论”指出,大脑构建并存储个人空间环境的“地图”,以便将来可以用于指导行动和行为47.研究表明,海马体编码空间信息,同时也支持情景记忆的形成。更具体地说,人们认为右海马体编码空间记忆,而左海马体存储情景记忆38。目前新颖的空间导航任务的结果证明了空间记忆和情景记忆之间的明显联系,为认知地图理论提供了支持,并表明该任务可能用于检查空间导航与非临床人群的情景记忆之间的关系。未来的研究应寻求在临床人群中检查这种关系,包括那些患有神经退行性疾病(如轻度认知障碍、阿尔茨海默病或其他类型的痴呆)的人。
这项任务对锻炼或 3 个月内进行的骑行总量很敏感。先前对啮齿动物的研究表明,运动是增加海马依赖性认知的最有效方法之一,包括长期记忆、模式分离、自发交替、情境恐惧条件反射、被动回避学习和新物体识别,这种效果取决于运动诱导的海马神经发生增加 48,49,50.此外,文献表明,长期运动可以增强人类的海马功能,在单词列表回忆、故事回忆以及空间和非空间关系记忆方面都有所改善;这种效应被认为是由运动引起的海马体积增加 7,27,51,52,53,54,55 驱动的。这项新的空间导航任务补充了啮齿动物的发现,并增加了人类文献,显示了身体活动对空间导航能力的重要性。
尽管在最初的研究中,年龄与空间导航能力呈负相关,但在应用Bonferroni校正时,这种效应被消除了。这表明空间导航能力可以保持到55岁。其他文献表明,空间导航是一种随着年龄的增长而下降的认知能力 56,57,58.神经影像学研究显示,海马体、海马旁回、后扣带回皮层(脾后皮层)、顶叶和前额叶皮层等区域的年龄相关神经退行性变可能与这种与年龄相关的认知能力下降有关58。考虑到年龄范围有限(25-55岁),通过纳入更大的年龄范围,特别是老年人(65+),未来的研究人员可能会看到年龄和空间导航能力之间存在显着的相关性。未来的研究应考虑在65岁及以上的成年人中进行这种空间导航任务,甚至那些有轻度认知障碍或其他痴呆样疾病的人。
虚拟导航任务中一个明显缺失的环节是缺乏身体与大脑的关系。也就是说,在穿越现实世界的环境中,激活发生在周围神经系统和中枢神经系统的水平上,包括本体感受器、外感受器、内感受器和前庭系统的激活,以及感觉运动皮层、基底神经节和小脑的激活。如果没有这种物理输入,虚拟导航可能与物理导航截然不同。尽管如此,研究表明,虚拟环境刺激与现实世界导航相同的大脑区域 22,32,33。使任务更加活跃,就像当前任务中的设计一样,可能有助于让大脑相信它正在物理地穿越时间和空间,模仿自然的空间导航。其他人已经找到了对这一假设的支持。Meade 等人(2019 年)的一项研究检查了使用类似的虚拟空间导航任务时主动和被动编码之间的差异59。主动导航是指参与者能够在虚拟空间中自行移动(类似于本研究),而被动导航则由导览组成,参与者不移动,而是向参与者展示导航路线。作者认为,由于身体(例如,运动和本体感觉)和认知成分(例如,决策和注意力)的参与,主动导航可能对老年人群更有益,并且可能通过直接参与记忆编码过程来增强记忆性能。本研究中使用的主动导航可以解释结果,表明参与者能够准确地回忆起他们经历的情景记忆。
主动导航还可能有助于参与多感觉整合区域,例如脾后复合体 (RSC)60,61,62。最近的一项研究发现,在虚拟现实空间导航任务中,参与者需要在记住家乡和地标位置之间旅行时进行实际行走,从而导致 RSC θ 振荡(即用 EEG 记录的 4-8 赫兹神经元振荡)16。这种增加的θ功率在头部方向变化和旋转时最为突出。在啮齿动物中,已经表明 RSC θ 活动对于涉及网格单元和头部方向计算的空间编码至关重要63,64。RSC 也被认为对于使用来自环境的线索来锚定人类的认知地图47 很重要。
虽然虚拟空间导航任务提供了许多好处,但它们阻止了个体在时间和空间中物理移动,导致本体感觉、前庭和感觉运动系统的激活有限。感觉和运动过程之间存在不一致,这可能导致一些参与者变得头晕或恶心。在目前的任务中,通过控制参与者能够在环境中移动和观察环境的速度,这受到了限制。为了能够对环境的所有方面进行编码,必须能够环顾四周(即,进行虚拟头部旋转);然而,这种能力需要足够慢,以确保参与者不会身体不适。尽管如此,久坐不动时空间导航的能力是有利的,因为它使研究人员能够研究那些经历行动不便、身体疲劳或其他导致个人无法行走的残疾的个体。另一个限制是,这项任务尚未经过可靠性和有效性测试,而其他任务正在朝着这个方向发展,包括虚拟空间导航评估(VSNA)65。未来的研究可以通过脑电图或功能性磁共振成像来检查相关的神经活动,同时参与者完成这项空间导航任务。参与者还可以配备测量生理变量的设备,如心率变异性和皮肤电活动。这将允许检查在虚拟环境中导航时发生的外围和中心机制。重要的是,此任务可用于评估空间导航能力随时间的变化。未来的研究可以利用这项任务来调查衰老或神经退行性疾病(如阿尔茨海默氏症或帕金森氏病)如何影响个体的空间导航和情景记忆。相反,这项任务可用于探索额外的身心运动干预如何影响空间导航和情景记忆,包括舞蹈、瑜伽或冥想。
披露声明
作者没有披露任何信息可报告。
致谢
这项工作得到了iTHRIV学者计划的支持,该计划部分得到了美国国立卫生研究院(NIH)国家转化科学促进中心(UL1TR003015 和 KL2TR003016)的支持。我们要感谢 Samuel McKenzie 博士、Michael Astolfi、Meet Parekh 和 Andrei Marks 在计算机编程方面所做的贡献。
材料
| Name | Company | Catalog Number | Comments |
| Unity Real-Time Development Platform | Unity | Unity Student / Unity Personal | https://unity.com/ |
参考文献
- Maguire, E. A., Burgess, N., O'Keefe, J. Human spatial navigation: cognitive maps, sexual dimorphism, and neural substrates. Current Opinion in Neurobiology. 9 (2), 171-177 (1999).
- Buzsáki, G., Moser, E. I. Memory, navigation and theta rhythm in the hippocampal-entorhinal system. Nature Neuroscience. 16 (2), 130-138 (2013).
- Robinson, N. T. M., et al. Targeted activation of hippocampal place cells drives memory-guided spatial behavior. Cell. 183 (7), 2041-2042 (2020).
- Fordyce, D. E., Farrar, R. P. Physical activity effects on hippocampal and parietal cortical cholinergic function and spatial learning in F344 rats. Behavioural Brain Research. 43 (2), 115-123 (1991).
- van Praag, H. Neurogenesis and exercise: past and future directions. Neuromolecular Medicine. 10 (2), 128-140 (2008).
- Heo, S., et al. Resting hippocampal blood flow, spatial memory and aging. Brain Research. 1315, 119-127 (2010).
- Erickson, K. I., et al. Exercise training increases size of hippocampus and improves memory. Proceedings of the National Academy of Sciences of the United States of America. 108 (7), 3017-3022 (2011).
- Dobbels, B., et al. The virtual Morris water task in 64 patients with bilateral vestibulopathy and the impact of hearing status. Frontiers in Neurology. 11, 710 (2020).
- Moffat, S. D., Hampson, E., Hatzipantelis, M. Navigation in a "Virtual" maze: Sex Differences and correlation with psychometric measures of spatial ability in humans. Evolution and Human Behavior. 19 (2), 73-87 (1998).
- Ijaz, K., Ahmadpour, N., Naismith, S. L., Calvo, R. A. An immersive virtual reality platform for assessing spatial navigation memory in predementia screening: Feasibility and usability study. JMIR Mental Health. 6 (9), 13887 (2019).
- Sakhare, A. R., Yang, V., Stradford, J., Tsang, I., Ravichandran, R., Pa, J. Cycling and spatial navigation in an enriched, immersive 3d virtual park environment: A feasibility study in younger and older adults. Frontiers in Aging Neuroscience. 11, 218 (2019).
- Starrett, M. J., et al. Landmarks: A solution for spatial navigation and memory experiments in virtual reality. Behavior Research Methods. 53 (3), 1046-1059 (2021).
- Diersch, N., Wolbers, T. The potential of virtual reality for spatial navigation research across the adult lifespan. The Journal of Experimental Biology. 222, 187252 (2019).
- Kuhrt, D., St John, N. R., Bellmund, J. L. S., Kaplan, R., Doeller, C. F. An immersive first-person navigation task for abstract knowledge acquisition). Scientific Reports. 11 (1), 5612 (2021).
- Castelli, L., Latini Corazzini, L., Geminiani, G. C. Spatial navigation in large-scale virtual environments: Gender differences in survey tasks. Computers in Human Behavior. 24 (4), 1643-1667 (2008).
- Do, T. -. T. N., Lin, C. -. T., Gramann, K. Human brain dynamics in active spatial navigation. Scientific Reports. 11 (1), 13036 (2021).
- Jungnickel, E., Gramann, K. Mobile brain/body imaging (MoBI) of physical interaction with dynamically moving objects. Frontiers in Human Neuroscience. 10, 306 (2016).
- Park, J. L., Dudchenko, P. A., Donaldson, D. I. Navigation in real-world environments: New opportunities afforded by advances in mobile brain imaging. Frontiers in Human Neuroscience. 12, 361 (2018).
- Bettio, L. E. B., Rajendran, L., Gil-Mohapel, J. The effects of aging in the hippocampus and cognitive decline. Neuroscience and Biobehavioral Reviews. 79, 66-86 (2017).
- Wang, Z., van Praag, H., Boecker, H., Hillman, C., Scheef, L., Struder, H. Exercise and the Brain: Neurogenesis, Synaptic Plasticity, Spine Density, and Angiogenesis. Functional Neuroimaging in Exercise and Sport Sciences. , (2012).
- . Unity Real-Time Development Platform. Unity Available from: https://unity.com/ (2023)
- Miller, J. F., et al. Neural activity in human hippocampal formation reveals the spatial context of retrieved memories. Science. 342 (6162), 1111-1114 (2013).
- Urban construction pack. Unity asset store. At Available from: https://assetstore.unity.com/packages/3d/environments/urban-construction-pack-8081#reviews (2018)
- . Object Motion Tracker. Unity Available from: https://forum.unity.com/threads/object-motion-traker-engine-trails-time-travel-game-mechanics-and-more.241544/ (2014)
- Makoto's preprocessing pipeline. EEGLAB Available from: https://sccn.ucsd.edu/wiki/Makotos_preprocessing_pipeline (2023)
- Faul, F., Erdfelder, E., Buchner, A., Lang, A. -. G. Statistical power analyses using G*Power 3.1: tests for correlation and regression analyses. Behavior Research Methods. 41 (4), 1149-1160 (2009).
- Basso, J. C., et al. Examining the effect of increased aerobic exercise in moderately fit adults on psychological state and cognitive function. Frontiers in Human Neuroscience. 16, 833149 (2022).
- Keefe, J. O., Nadel, L. . The Hippocampus as a Cognitive Map. , (1978).
- Eichenbaum, H. The Hippocampus as a Cognitive Map . . . of Social Space. Neuron. 87 (1), 9-11 (2015).
- Moser, E. I., Kropff, E., Moser, M. -. B. Place cells, grid cells, and the brain's spatial representation system. Annual Review of Neuroscience. 31, 69-89 (2008).
- Ekstrom, A. D., et al. Cellular networks underlying human spatial navigation. Nature. 425 (6954), 184-188 (2003).
- Jacobs, J., Kahana, M. J., Ekstrom, A. D., Mollison, M. V., Fried, I. A sense of direction in human entorhinal cortex. Proceedings of the National Academy of Sciences of the United States of America. 107 (14), 6487-6492 (2010).
- Spiers, H. J., Burgess, N., Hartley, T., Vargha-Khadem, F., O'Keefe, J. Bilateral hippocampal pathology impairs topographical and episodic memory but not visual pattern matching. Hippocampus. 11 (6), 715-725 (2001).
- Spiers, H. J., et al. Unilateral temporal lobectomy patients show lateralized topographical and episodic memory deficits in a virtual town. Brain. 124, 2476-2489 (2001).
- Maguire, E. A., Burgess, N., Donnett, J. G., Frackowiak, R. S., Frith, C. D., O'Keefe, J. Knowing where and getting there: a human navigation network). Science. 280 (5365), 921-924 (1998).
- King, J. A., Burgess, N., Hartley, T., Vargha-Khadem, F., O'Keefe, J. Human hippocampus and viewpoint dependence in spatial memory. Hippocampus. 12 (6), 811-820 (2002).
- Burgess, N., Maguire, E. A., O'Keefe, J. The human hippocampus and spatial and episodic memory. Neuron. 35 (4), 625-641 (2002).
- Laidi, C., et al. Preserved navigation abilities and spatio-temporal memory in individuals with autism spectrum disorder. Autism Research. 16 (2), 280-293 (2023).
- Iglói, K., Zaoui, M., Berthoz, A., Rondi-Reig, L. Sequential egocentric strategy is acquired as early as allocentric strategy: Parallel acquisition of these two navigation strategies. Hippocampus. 19 (12), 1199-1211 (2009).
- Bullens, J., Iglói, K., Berthoz, A., Postma, A., Rondi-Reig, L. Developmental time course of the acquisition of sequential egocentric and allocentric navigation strategies. Journal of Experimental Child Psychology. 107 (3), 337-350 (2010).
- Bellassen, V., Iglói, K., de Souza, L. C., Dubois, B., Rondi-Reig, L. Temporal order memory assessed during spatiotemporal navigation as a behavioral cognitive marker for differential Alzheimer's disease diagnosis. The Journal of Neuroscience. 32 (6), 1942-1952 (2012).
- Iglói, K., et al. Interaction between hippocampus and cerebellum crus I in sequence-based but not place-based navigation. Cerebral Cortex. 25 (11), 4146-4154 (2015).
- Iglói, K., Doeller, C. F., Berthoz, A., Rondi-Reig, L., Burgess, N. Lateralized human hippocampal activity predicts navigation based on sequence or place memory. Proceedings of the National Academy of Sciences of the United States of America. 107 (32), 14466-14471 (2010).
- Commins, S., et al. NavWell: A simplified virtual-reality platform for spatial navigation and memory experiments. Behavior Research Methods. 52 (3), 1189-1207 (2020).
- Fan, C. L., Abdi, H., Levine, B. On the relationship between trait autobiographical episodic memory and spatial navigation. Memory & Cognition. 49 (2), 265-275 (2021).
- Epstein, R. A., Patai, E. Z., Julian, J. B., Spiers, H. J. The cognitive map in humans: spatial navigation and beyond. Nature Neuroscience. 20 (11), 1504-1513 (2017).
- van Praag, H., Kempermann, G., Gage, F. H. Running increases cell proliferation and neurogenesis in the adult mouse dentate gyrus. Nature Neuroscience. 2 (3), 266-270 (1999).
- van Praag, H., Christie, B. R., Sejnowski, T. J., Gage, F. H. Running enhances neurogenesis, learning, and long-term potentiation in mice. Proceedings of the National Academy of Sciences of the United States of America. 96 (23), 13427-13431 (1999).
- Voss, M. W., Soto, C., Yoo, S., Sodoma, M., Vivar, C., van Praag, H. Exercise and hippocampal memory systems. Trends in Cognitive Sciences. 23 (4), 318-333 (2019).
- Jennen, L., Mazereel, V., Lecei, A., Samaey, C., Vancampfort, D., van Winkel, R. Exercise to spot the differences: a framework for the effect of exercise on hippocampal pattern separation in humans. Reviews in the Neurosciences. 33 (5), 555-582 (2022).
- Griffin, &. #. 2. 0. 1. ;. W., Mullally, S., Foley, C., Warmington, S. A., O'Mara, S. M., Kelly, A. M. Aerobic exercise improves hippocampal function and increases BDNF in the serum of young adult males. Physiology & Behavior. 104 (5), 934-941 (2011).
- Firth, J., et al. Effect of aerobic exercise on hippocampal volume in humans: A systematic review and meta-analysis. NeuroImage. 166, 230-238 (2018).
- Voss, M. W., Vivar, C., Kramer, A. F., van Praag, H. Bridging animal and human models of exercise-induced brain plasticity. Trends in Cognitive Sciences. 17 (10), 525-544 (2013).
- Pereira, A. C., et al. An in vivo correlate of exercise-induced neurogenesis in the adult dentate gyrus. Proceedings of the National Academy of Sciences of the United States of America. 104 (13), 5638-5643 (2007).
- vander Ham, I. J. M., Claessen, M. H. G. How age relates to spatial navigation performance: Functional and methodological considerations. Ageing Research Reviews. 58, 101020 (2020).
- Zhong, J. Y., Moffat, S. D. Extrahippocampal contributions to age-related changes in spatial navigation ability. Frontiers in Human Neuroscience. 12, 272 (2018).
- Moffat, S. D. Aging and spatial navigation: what do we know and where do we go. Neuropsychology Review. 19 (4), 478-489 (2009).
- Meade, M. E., Meade, J. G., Sauzeon, H., Fernandes, M. A. Active navigation in virtual environments benefits spatial memory in older adults. Brain Sciences. 9 (3), 47 (2019).
- Powell, A., et al. Stable encoding of visual cues in the mouse retrosplenial cortex. Cerebral Cortex. 30 (8), 4424-4437 (2020).
- Fischer, L. F., Mojica Soto-Albors, R., Buck, F., Harnett, M. T. Representation of visual landmarks in retrosplenial cortex. eLife. 9, 51458 (2020).
- Stacho, M., Manahan-Vaughan, D. Mechanistic flexibility of the retrosplenial cortex enables its contribution to spatial cognition. Trends in Neurosciences. 45 (4), 284-296 (2022).
- Yoder, R. M., Clark, B. J., Taube, J. S. Origins of landmark encoding in the brain. Trends in Neurosciences. 34 (11), 561-571 (2011).
- Lozano, Y. R., Page, H., Jacob, P. -. Y., Lomi, E., Street, J., Jeffery, K. Retrosplenial and postsubicular head direction cells compared during visual landmark discrimination. Brain and Neuroscience Advances. 1, 2398212817721859 (2017).
- Ventura, M., Shute, V., Wright, T., Zhao, W. An investigation of the validity of the virtual spatial navigation assessment. Frontiers in Psychology. 4, 852 (2013).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。