
Method Article
仮想空間における人間の空間ナビゲーションと運動感受性の評価
要約
ここでは、空間ナビゲーションとエピソード記憶能力の両方を評価する、新しく、簡潔で、アクティブな空間ナビゲーションタスクを紹介します。重要なことに、空間ナビゲーションとエピソード記憶は互いに関連しており、このタスクは運動に対する感受性を示しました。
要約
空間ナビゲーション(SN)は、環境内を移動する能力であり、時間と空間のどこにいるかを理解する必要があります。この能力は、海馬内の場所細胞の逐次的な発火に依存することが知られています。SNは、このプロセスが加齢とともに悪化するため、特に神経変性疾患において調査すべき重要な行動です。ただし、SNの調査は、この海馬依存性の課題を評価するための高度な行動技術が不足しているため、制限されています。したがって、このプロトコルの目標は、ヒトのSNを研究するための新しい現実世界のアプローチを開発することでした。具体的には、クロスプラットフォームのゲームエンジンを使用して、アクティブな仮想SNタスクを開発しました。エンコードフェーズでは、参加者は仮想都市をナビゲートしてランドマークを見つけました。記憶フェーズでは、参加者はこれらの報酬の場所を記憶し、これらの場所にアイテムを届けました。各場所を見つけるための時間がキャプチャされ、場所、順序、アイテム、および関連性の側面を含む自由想起フェーズによってエピソード記憶が評価されました。移動動作 (x、y、z 座標) は、ゲーム エンジンで利用可能なアセットを通じて評価されました。重要なことは、このタスクの結果は、空間学習と記憶能力の両方、およびエピソード記憶を正確に捉えることを示しています。さらに、このタスクは運動に敏感であり、海馬の機能を改善するという調査結果が示されています。全体として、この知見は、ヒトの海馬の機能を経時的に追跡する新しい方法を示唆しており、この行動は身体活動トレーニングのパラダイムに敏感である。
概要
時間と空間の中で体を動かすことは、環境に関する情報を学習し、記憶するために重要です。この能力は空間ナビゲーションとして知られており、進化論的に言えば、環境内の食物、水、社会的対応者、およびその他の報酬を見つけるために不可欠な生存ツールです1,2。空間ナビゲーションは、内側側頭葉のC字型大脳辺縁系構造である海馬に依存しています。海馬は、CA1、CA2、CA3、および歯状回サブリージョンで構成されています。海馬は、意識的な経験を定義するのに役立つ記憶のエンコード、統合、および検索をサポートします。具体的には、空間ナビゲーションは、時間、場所、および経験に関連する詳細(視覚、音、匂い、感情など)の側面を含む、個人的な経験の記憶を指す明示的な記憶の一種であるエピソード記憶をサポートします。私たちが異なる環境を空間的に移動しながら、場所細胞と呼ばれるニューロンが系統的に発火し、時間と空間の両方で自分がどこにいるのかを理解することができます。実際、これらのニューロンの直接的な光刺激は、げっ歯類の行動をその物理的位置(すなわち、場所フィールド)に偏らせることが示されています3。
げっ歯類の空間ナビゲーションの評価は、伝統的に、Morris Water Maze、Y maze、T maze、およびradial arm maze 4,5などの行動パラダイムを通じて研究されてきました。重要なことに、これらの行動課題は、電気生理学的深度記録などの技術を使用して、空間ナビゲーションの神経相関をin vivoで調査することを可能にします。しかし、人間の空間ナビゲーションの評価は、ほとんどの科学的調査が実社会ではなく実験室で行われるため、科学的に困難であることが証明されています。人間を対象とした以前の研究では、双方向の地図学習課題、精神回転課題、空間記憶課題など、従来の紙ベースの課題で空間能力を評価してきました6,7。また、Virtual Morris Water Taskやその他の仮想迷路タスクなどのコンピュータベースのタスクを利用しているものもあり、これらは空間能力のより伝統的な心理測定と相関していることが示されている8,9。さらに、一般に入手可能な無料のビデオゲームソフトウェアパッケージのアクセス可能性により、研究者は、コンピュータ画面上または仮想現実10,11,12,13,14,15のいずれかで提示できる3次元仮想環境の開発を開始している.モバイル脳-体イメージング(MoBI)の科学的な進歩により、研究者は実世界の設定での空間ナビゲーションの探求を開始することも可能になった16,17,18。
重要なのは、空間学習と記憶は年齢とともに低下する認知能力であり、高齢者は家に帰ろうとしたときに自分がどこにいるのかわからなくなったり、迷子になったりする可能性が高いということです。この欠損は、海馬のレベルで発生する神経変性が原因である可能性が最も高いです。これは、19歳で最初に悪化する脳の非常に可塑性の高い領域の1つです。したがって、空間ナビゲーション能力とエピソード記憶能力を評価するための現実世界の方法を開発することは、研究の重要な手段です。臨床レベルでは、これらのタイプのタスクは、記憶力低下の進行を判断したり、軽度認知障害、アルツハイマー病、またはその他の形態の認知症を診断したりするのに役立つ可能性があります。逆に、身体活動は、空間ナビゲーション能力を向上させるための最良のメカニズムの1つとして認識されています。げっ歯類の研究は、運動がモリスウォーター迷路、Y迷路、T迷路、放射状腕迷路20など、さまざまな空間タスクの学習と記憶を強化することを示しています。運動による空間能力の改善は、ヒトでも実証されており、この効果は海馬の体積の増加と有意に関連しています7。しかし、この行動効果は、参加者に画面上のドットの位置を覚えてもらう空間記憶課題を用いて実証されました。この課題は、現実世界の空間ナビゲーションにはあまり生態学的妥当性を持たない可能性があります。人間の運動が仮想環境で提示される空間ナビゲーションタスクに与える影響を調査した研究はほとんどありません。
したがって、仮想環境を使用して、エピソード記憶とともに空間学習と記憶を評価する認知タスクが設計されました。重要なのは、このタスクが最新のビデオゲームソフトウェアを使用して設計され、最新のグラフィックデザインとリアルな機能(空の雲の移動など)を可能にしたことです。この課題は、健康な成人のグループで、長期の有酸素運動の練習を経験する前と後にテストされました。結果は、参加者が仮想体験に関する空間情報とエピソード記憶の両方をエンコードして記憶できることを示しています。さらに、このタスクのパフォーマンスは可塑的であり、運動の影響を受けることが調査結果で示されています。
具体的には、クロスプラットフォームのゲームエンジン21 を通じて仮想環境を開発したが、これは、空間ナビゲーションおよびエピソード記憶能力、海馬によって支持される固有の認知能力を評価した。この環境に使用されたマップは、Miller et al. (2013)22 から導き出されました。利用されたゲームエンジンにより、開発者はアセットをダウンロードして、仮想環境を構築する目的で独自の機能を追加できます。アセット23 が活用され、参加者がナビゲートできる道路や建物を備えたリアルな都市環境を構築することができました。さらに、参加者が仮想環境内を移動する際の参加者のx、y、およびz座標および回転の追跡を可能にするアセット24 が使用された。前述のアセットにより、これらの機能をミリ秒のタイムスケール (~33 ミリ秒) で記録することができました。その後、仮想環境は、参加者が自宅のラップトップまたはデスクトップコンピューターで完了できる空間ナビゲーションタスクとしてコンパイルおよび管理されました。以下のプロトコルでは、この空間ナビゲーション タスクを管理し、関与する方法について詳しく説明します。
プロトコル
すべての研究文書とデータ収集方法は、ニューヨーク大学人間を対象とする活動委員会によって承認され、それに準拠しています。参加者は、研究関連の活動に参加する前に、インフォームドコンセントを与えました。
1. ゲームプレイの設定
- 次の公開リポジトリから必要なファイルをダウンロードします https://github.com/embodiedbrainlab/BassoSpatialNavigationTask
- unity.com/download からUnity Hubをダウンロードし、Unityバージョン5.3.1f1をインストールします。
- 手順 1.1 でリポジトリからダウンロードしたファイルを Unity の プロジェクト として開きます。
- ダウンロードしたファイルを使用してプロジェクトが作成されたら、ウィンドウの上部にある [ファイル ] タブを選択し、[ ビルドして実行] を選択します。
- [ビルド設定] ウィンドウが最初に表示されます。[SpatialNavigation] > [Scenes] > [Big City B] Lures と [Scenes/LeFin] を選択します。PC、Mac、Linux スタンドアロンを選択し、Build and Run ボタンをクリックします。
注:研究者に.exe(アプリケーション)ファイルを保存するように求めるウィンドウが表示されます。研究者がアプリケーションを構築したら、アプリケーションをダブルクリックして、プロトコルの将来の反復を実行できます。研究者がこのファイルを実行することを決定した場合、それぞれの結果はアプリケーションが配置されているのと同じディレクトリに保存されます。 - 「SpatialNavWeb Configuration」というタイトルのウィンドウが表示されます。[グラフィックス]タブで画面の解像度とグラフィック品質を調整します。[入力]タブでゲームのコントロールを変更します。
- 「再生」をクリックします。 をクリックして、空間ナビゲーション タスクを開始します。
2. 空間ナビゲーション課題中の脳波計(EEG)による脳活動の記録
注:EEGは、頭皮に配置された電極を介して、人間の脳の皮質のニューロンの活動をミリ秒のタイムスケールでマイクロボルトで測定します。EEGは、非侵襲的な脳イメージングの一種で、参加者が仮想環境のナビゲーションなどの他の活動を行っている間に、脳をスキャンすることができます。
- 測定テープを使用して、参加者の頭をイオンから鼻まで測定し、EEGキャップが適切に取り付けられていることを確認します。
- 電極をEEGキャップに配置し(必要な場合)、参加者にEEGキャップを装着して、適切なフィッティングと配置を確保します(図1A)。
- EEGソフトウェアを起動します。各電極に電極ゲルを充填して、インピーダンス測定値が25kΩ未満であることを確認します。
- EEG信号がきれいで大きなアーチファクトがないように見えるようになったら、録音を開始します。
- 研究チームのメンバーに、参加者が以下の手順を実行するのを見守ってもらいます。
- 次の各イベントでトリガーパルスをEEG記録システムに送信します(図1B)
エンコード フェーズの開始
エンコード フェーズの終了
記憶フェーズの開始
記憶フェーズの終了
エピソード記憶フェーズの開始
エピソード記憶フェーズの終了
-研究者が興味を持っていると見つけたその他のイベント

図1:空間ナビゲーションゲームプレイ中の脳波記録 (A)移動型脳波計(EEG)デバイスを装備した人物が空間ナビゲーションタスクを実行しているときの画像。(B)符号化フェーズ、(C)記憶フェーズ、および(D)エピソード記憶フェーズ中のシータ活動(4-8 Hz)のパワースペクトル密度プロット。すべてのデータは前処理され、電力は周波数(uV2/Hz)で正規化されました。 この図の拡大版を表示するには、ここをクリックしてください。
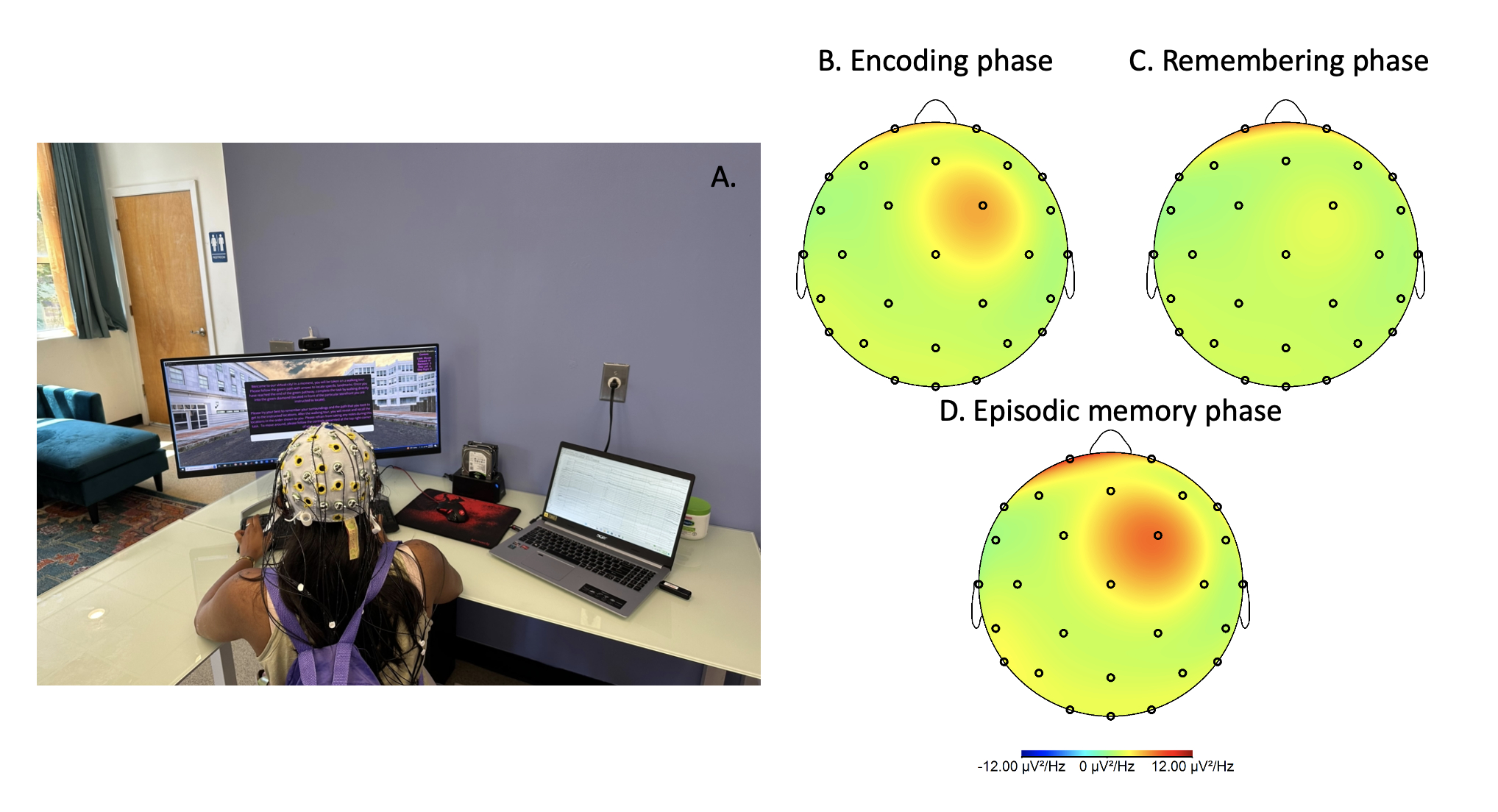{kind=link}
注:Arduinoテクノロジーを使用する研究者は、EEG記録とゲームエンジン環境の間で同期トリガーを送信して、神経生理学的データと行動データ間の正確なペアリングをミリ秒のタイムスケールで発生させることもできます。これらのマーカーにより、研究者は、仮想環境との重要な相互作用の前、最中、および後の参加者の脳活動をさかのぼって参照することができます。研究者は、後で比較できるように、仮想環境への関与の前および/または後にベースラインの脳活動の期間を行うことも検討できます。
3. 空間ナビゲーションタスクの指示(図2)
- 手順: 参加者が快適に座っていることを確認してください、理想的には足を床につけて座ってください。画面に表示される指示を読んでもらい、街並みの中の特定のランドマークを訪れながら、周囲の環境やたどった道を思い出すように促します(図2A)。
- 参加者がマウスとキーボードに向けられていることを確認します。マウスと左クリックでタスクを開始するように参加者に指示します(図2A)。
- 参加者が、キーボードの W、 A、 S、 D キーを使用して環境をナビゲートする必要があることを理解していることを確認してください。 W キーは前方に移動し、 S キーは後方に移動します。または、上矢印と下矢印もそれらを前後に移動します。 A キーは左に移動し、 D キーは右に移動します。
- 参加者がコンピューターのマウスを使用して、参加者が頭を動かしているかのように被験者の視点を動かすことができることを参加者が理解していることを確認します。参加者は上、下、左、右を見ることができます。視点を移動するためにマウスをクリックする必要はありません。
注意: 仮想環境のナビゲーションに関する指示は、参加者の画面の右上隅に表示されます(図2A-F)。

図2:空間ナビゲーションタスクの画像。 クロスプラットフォームのゲームエンジンで開発された空間ナビゲーションとエピソード記憶タスクのスクリーンショット。スクリーンショットの例は、左上隅から左から右に示されています:(A)全体的な指示。(B)エンコードフェーズ中の移動。(C)エンコードフェーズ中にストアフロントを見つけるステップと、(D)エンコードフェーズ中の移動。(E)フェーズを記憶するための指示。(F)記憶段階の配信部分。(G)エピソード記憶フェーズの指示。(H)エピソード記憶フェーズ;(I) ゲーム終了。 この図の拡大版を表示するには、ここをクリックしてください。
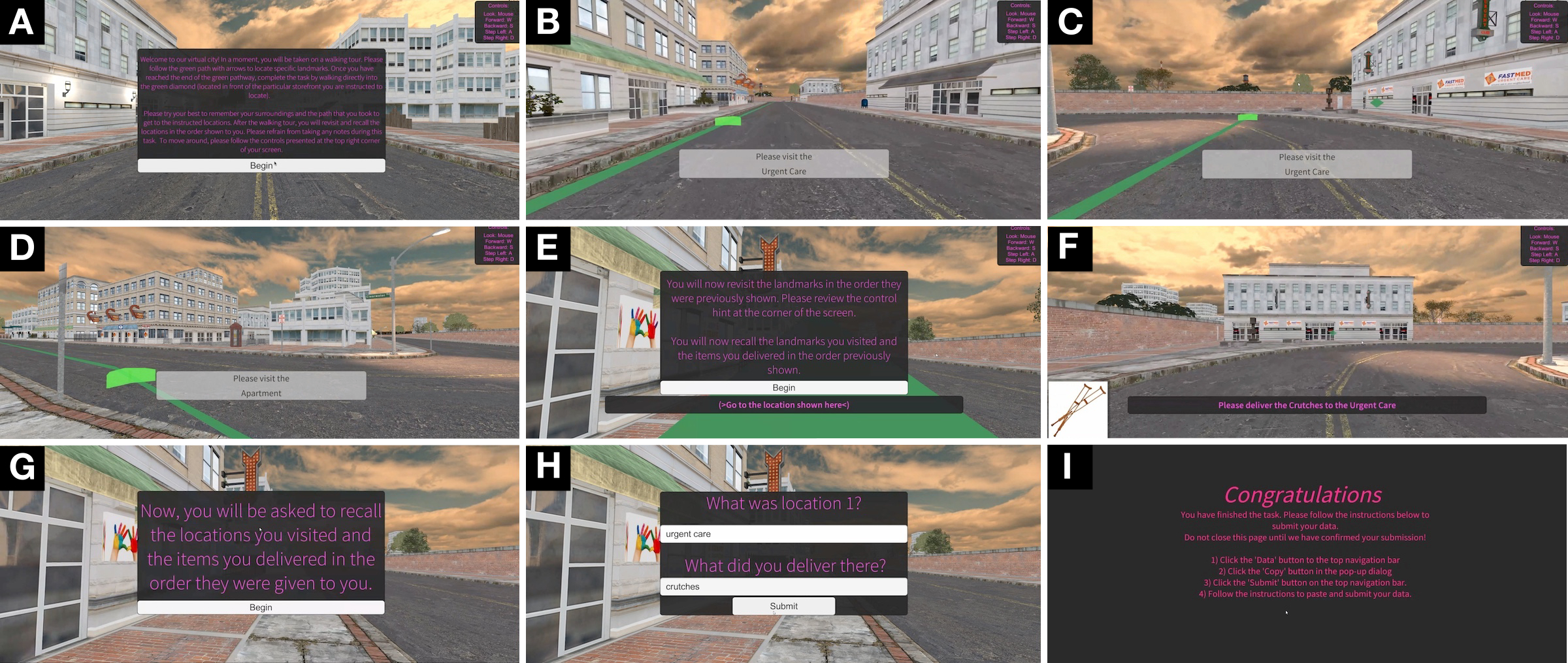{kind=link}
4. 空間ナビゲーションタスクのエンコードフェーズ
- 参加者に最初のランドマーク(図3)を訪れてもらい、緑の矢印(図2B)のある緑の道を積極的にたどってもらいます。
- 参加者が最初のランドマークに到着したら、その場所にある緑色のひし形を参加者に歩かせます(図2C)。
- 参加者が緑のひし形を集めたら、緑の道をたどって次のランドマークを訪れてもらいます。参加者が2つ目のランドマークに到着したら、その場所にある緑色のひし形を歩いてもらいます。
- 参加者が5つのランドマークすべてを訪れ、5つのダイヤモンドをすべて収集するまで、参加者にこのタスクを続けてもらいます(図2D)。
注:このタスクのエンコードフェーズ全体を通じて、参加者は市内の5つのランドマークの位置を記憶するように求められます(図3)。タスクの鳥瞰図を 図 4 に示します。

図3:ストアフロントの画像。 参加者は、環境内に開発された18の場所のうち5つを訪れ、それぞれにユニークで詳細な店舗がありました。これらの場所の例としては、(A)ピザパーラー、(B)ビタミンショップ、(C)家具店、(D)ウェディングストア、(E)キオスク、(F)カジノなどがあります。 この図の拡大版を表示するには、ここをクリックしてください。
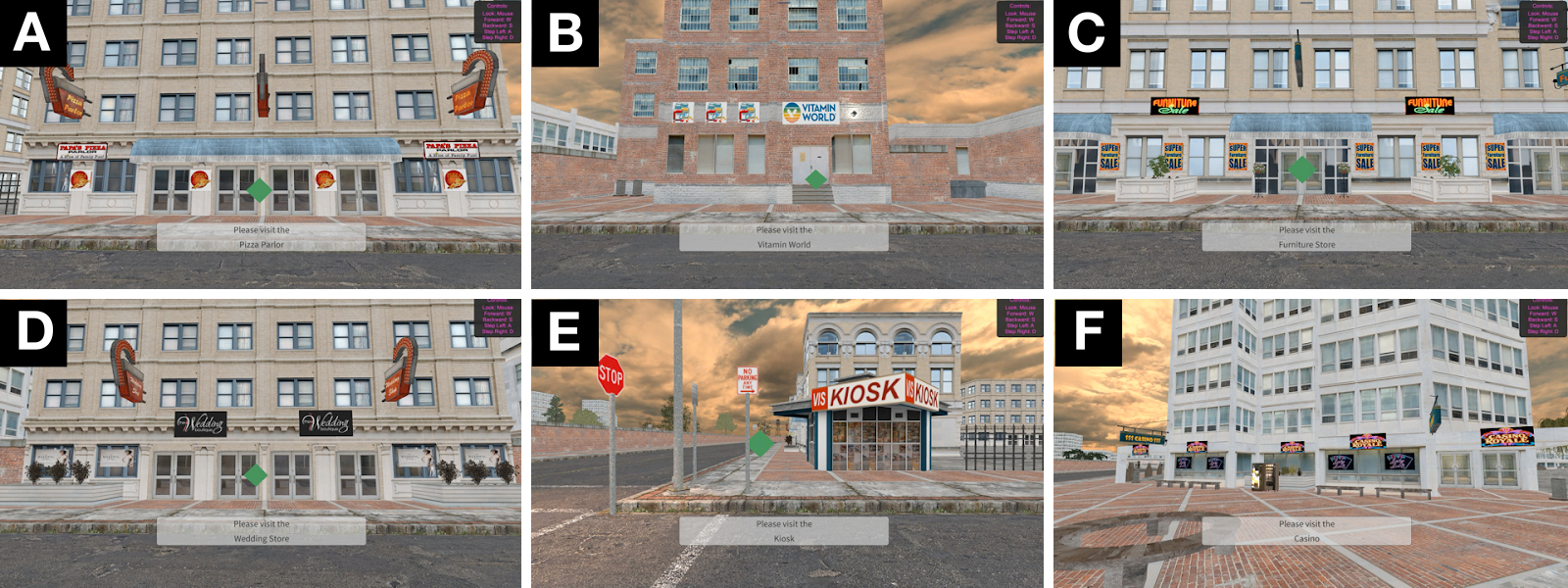{kind=link}

図4:空間ナビゲーションタスクのマップ。 参加者がナビゲートした仮想環境の鳥瞰図。 この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}
5. 空間ナビゲーションタスクの記憶フェーズ
- 次に、参加者に各ランドマークを再訪させます(つまり、記憶フェーズ; 図2E)。
注:参加者は、エンコードフェーズ中に最後に訪れた場所から記憶フェーズを開始します。 - 参加者にマウスを使用してもらい、 Begin(開始) の上を左クリックします(図2E)。
- エンコード フェーズで参加者が訪れた最初のランドマークを参加者に訪問してもらいます。
- 参加者に、この最初のランドマークにユニークなアイテムを「届ける」ように依頼します。
メモ: タスクのこの部分では、緑色のパス/矢印は表示されません(図2F)。 - 参加者がアイテムを届けたら、参加者に2番目のランドマークに移動してもらい、次のユニークなアイテムを届けてもらいます。参加者が5つのランドマークすべてを訪れ、5つのアイテムすべてを提供するまで、参加者にこのタスクを実行し続けます。
注:タスクのこの部分では、参加者の空間学習と記憶能力を評価します。これを行うために、プログラムは各ランドマークを見つける時間、平均シーク時間、およびタスクの合計時間を自動的に計算します。
6. 空間ナビゲーションタスクのエピソード記憶フェーズ
注:エピソード記憶テストは、記憶フェーズが完了した後に行われます。
- まず、参加者にマウスを使用して [開始] を左クリックしてもらいます(図2G)。
- 参加者に、参加者が訪れたランドマークと、参加者が配達したアイテムを、記憶フェーズの前半で指示されたとおりに正確に思い出させます(図2G)。参加者にコンピューターのキーボードを使用して回答を入力してもらいます(図2H)。
7. タスクの完了
- 参加者に最後のプロンプトを読んでもらい、タスクの完了とデータの提出を確認します(図2I)。
8. データの収集と分析
- 行動データ
- アプリケーションのディレクトリで Results.csv ファイルを見つけます (たとえば、 補足ファイル 1 を参照)。
注:研究者がUnityアプリケーションの[ファイル]タブで[ビルドして実行]をクリックすることを決定した場合、結果ファイルはダウンロードしたBassoSpatialNavigationTask-mainフォルダに保存されます。研究者がビルドされたアプリケーションをダブルクリックして環境を実行した場合 (ステップ 1.5)、結果ファイルはアプリケーションと同じディレクトリに表示されます。結果ファイルは、仮想環境が完了するたびに上書きされます。したがって、タスクの各完了後にこれらの結果を抽出し、複数の参加者と試行用に個別のファイルにコンパイルすることをお勧めします。 - データがクリーンで、妥当に見えることを確認します。
- Supplementary File 2 を使用して、開始時間、終了時間、平均シーク時間、プレイス スコア、アイテム スコア、オーダー スコア、アソシエーション スコア、エピソード記憶スコアなどの適切なスコアを計算します。
注:具体的には、場所のスコアは、正しく想起されたランドマークの数を集計することによって計算されます。注文スコアは、正しい順序で想起されたランドマークの数を決定することによって計算されます。アイテムスコアは、正しくリコールされたアイテムの数を集計して算出されます。アソシエーションスコアは、場所とアイテムの正しい組み合わせを集計することによって計算されます。最後に、全体的なエピソード記憶スコアは、場所、順序、アイテム、および関連付けのスコアを合計することによって計算されます。X/Z 座標の未処理の出力は、正しい時間順ではないことに注意してください。これを解決するには、[ Time ] 列のデータを最小値から最大値に並べ替えます。 - 選択したデータベースにデータを入力します。
- 独立サンプルの t 検定、分散分析、またはその他の適切な統計的検定を使用してデータを分析します。
- アプリケーションのディレクトリで Results.csv ファイルを見つけます (たとえば、 補足ファイル 1 を参照)。
- EEGデータ
- 前処理パイプラインを使用して、EEGデータ25をクリーニングします。
- 適切なソフトウェアパッケージを使用して、タスクのエンコードフェーズや記憶フェーズなど、参加者が仮想環境をナビゲートした長時間にわたってEEGデータの時間-周波数分析を実施します。
- 参加者が仮想環境と対話した特定の期間に関心がある場合は、イベント関連のポテンシャル分析を実施します。
- EEGデータに関連する統計分析を実施し、行動データとEEGデータの相関を検討する。
結果
コーディングの観点からのゲームプレイの説明: 「エンコーディング」フェーズでは、一連の 18 のウェイポイントが 3 次元空間の周りに配置され、それぞれに「配信アイテム」(つまり、その場所に配送するアイテム) が関連付けられています。これらのウェイポイントへの参照は、タスクを開始する前にプレイヤーコントローラーに保存され、静的に順序付けられました。つまり、ピザ店がポジション 1 に配置されていた場合、最初は常にポジション 1 になります。参加者が遭遇したウェイポイントにある程度のランダム性を持たせるために、ウェイポイントリストはフィッシャー・イェーツ・シャッフル・アルゴリズムによってシャッフルされました。この研究で実装されているフィッシャー・イェーツ・シャッフルは、元の配列の擬似乱数置換を生成します。可能な順列は、等しい確率で生成できます。アルゴリズムは、リストの最後 (n) から要素を選択することから始まります。疑似乱数が [0, n] の範囲で生成され、値 k に割り当てられます。次に、 n番目の値が k番目の 値と交換されます。次に、 n の値が 1 ずつ減らされ、まだ考慮されていないインデックスが 1 つだけになるまでこのプロセスが繰り返されます。
ウェイポイントのリストがシャッフルされた後、最初の 5 つの要素が選択されました。最適なパスは、ゲームエンジンのナビゲーションメッシュシステムと組み込みの最適パス計算によって生成されました。この一連のパスは、参加者の開始位置から始まり、各ウェイポイント間にリンクされたチェーンが作成され、最終的なウェイポイントで終了します。参加者がコントロールを獲得すると、緑色の線と意図された方向情報を提供する動く矢印で示されたこれらのパスをたどるように指示されました。この緑色の線と動く矢印が表示されていますが、参加者は仮想環境内をアクティブにナビゲートすることができました。参加者がウェイポイントの境界を入力すると、表示されたパスがリスト内の次のパスと入れ替わりました。
意図した数のウェイポイント要素を訪れると、参加者は「記憶」フェーズ(コードでは RevisitIntermission と呼ばれます)に入り、以前に表示された順序でランドマークを再訪するように指示されました。参加者がガイド付きツアーで提示された場所を再訪しようとすると、ウェイポイントに関連付けられた「Delivery Item」で指定された画像が提示されました。彼らには提案された道筋は提示されませんでした。彼らの動きは、アセットストアから供給されたオブジェクトモーショントラッカーコンポーネントで追跡されました。
参加者が提示された各ウェイポイントへの移動を終えると、次の画面に移動して、訪れた場所と各ウェイポイントに配達されたアイテムを思い出すように指示されました。リコールフェーズでは、参加者には2つのテキストエントリを含むプロンプトが表示されました。1つ目は、参加者が移動するように求められたウェイポイントを指示するものでした。2 つ目は、このウェイポイントに関連付けられた "配送アイテム" を指示します。応答と応答時間は、プロンプトごとに記録されました。
タスクの最後に、データが収集され、JSON 表現で保存されました。最初のセクションでは、参加者がガイドラインの助けを借りずに場所を見つけるように求められた再訪問フェーズを記録しました。記録された値には、ウェイポイント名、「Delivery Item」名、ウェイポイント到着までの時間が含まれていました。2 番目のセクションでは、想起フェーズで提示された回答を記録しました。このセクションには、場所、「配送アイテム」、および前述のプロンプトに応答するのにかかった時間に関する参加者の回答が含まれていました。すべてのコードは、https://github.com/embodiedbrainlab/BassoSpatialNavigationTask で見つけてダウンロードできます。
パワー分析と統計:相関点バイシリアルモデルのパワー分析は、両側検定、効果サイズ0.3、アルファレベル0.05、および検出力0.8を使用してG * Power 3.1で実施され、サンプルサイズがn = 8226と決定されました。記述統計を使用して、参加者の年齢、サイクリングクラスの数、および空間ナビゲーションとエピソード記憶能力の両方を含む一般的な測定値を評価しました。独立したサンプルのt検定を使用して、実験群と対照群の間のワークアウトの総数の有意差をテストしました。Shapiro-Wilkの検定(p<0.05)で評価されたように、すべてのデータが正規分布しているわけではないことを考慮して、ノンパラメトリックなスピアマンのrho相関係数を利用して、空間ナビゲーションとエピソード記憶能力、および年齢と空間ナビゲーション能力との関係を評価しました。アルファ値 0.05 を使用して、統計的有意性を決定しました。ボンフェローニ補正は、必要に応じて統計検定のファミリーで使用されました。IBM SPSS Statistics Version 26 は、すべての統計分析に使用されました。Pearsonの積とモーメントの相関関係は、Basso et al. (2022)27によって実施された手順であったため、サイクリングワークアウトの総数と空間ナビゲーション能力との関係を評価するために利用されました。
参加者: N = 130人の参加者は、テキサス州オースティンから、オンライン広告やチラシ広告などのさまざまな手法を通じて募集されました。選択基準には、英語を第一言語としていること、25歳から55歳の間であることが含まれていました(平均30.16±0.49)。さらに、すべての参加者は、身体的に健康であり、適度で定期的な運動療法を行っていると報告する必要がありました (過去 3 か月間、週に 1 回または 2 回、20 分以上運動することと定義)。除外基準には、現在喫煙者であること、または運動を困難または安全でない既存の身体的健康状態であることが含まれていました。除外基準には、不安神経、うつ病、双極性障害、統合失調症、てんかんなどの精神医学的または神経学的状態の現在診断を受けている、および/または薬を服用していることも含まれていました。
介入前のデータについては、n = 11 人の参加者が技術的な問題のためにデータを欠落しており、n = 1 人の参加者が非タスクの順守のために除外され、合計 n = 117 人の参加者が分析のために残りました。3か月の運動レジメンを完了したn = 80人の参加者のうち、n = 11人の参加者は最終的な空間ナビゲーションタスクを完了しなかったため、合計n = 69人の参加者が介入後および反復測定データの分析に残りました。この小さなサンプルサイズを利用して、サイクリングセッションの数と空間ナビゲーション能力との関係を調べました。対照群は介入期間中に20.73(± 0.72)のワークアウトを行ったのに対し、実験グループは47.87(± 2.24)のワークアウトを行い、これは統計的に有意な差(t[45.76] = −11.554, p < 0.001)であった。
一般的な測定とその関係: この新しい仮想環境タスクは、空間ナビゲーションとエピソード記憶容量の両方を測定します。最初の介入前テスト期間中、タスクの完了には平均318.69(±21.56)秒かかり、5つのサイトごとの平均シーク時間は82.88(±5.19)秒でした(図5A)。これらのデータポイントは、空間ナビゲーション能力(つまり、空間学習と記憶)を表しています。さらに、参加者は仮想体験の場所、アイテム、順序、および関連付けの側面をエンコードすることができ、参加者は自分の環境での20の新しい経験のうち14.84(±0.37)を覚えていました(図5B)。これらのデータポイントは、エピソード記憶能力を表しています。重要なことは、合計時間(図6A;r=-0.314、p<0.001)と平均シーク時間(図6B;r=-0.286、p<0.001)がエピソード記憶スコアと有意に相関していたことであり、このタスクでは空間ナビゲーション能力がエピソード記憶と関連していることを示しています。

図5:タスクの時間。 (A)平均シーク時間と合計シーク時間(秒単位)の両方で表される空間ナビゲーション能力と、(B)場所、アイテム、順序、関連付け、および全体的なエピソード記憶スコアのエンコードと記憶で表されるエピソード記憶能力の両方の平均(± SEM)。 この図の拡大版を表示するには、ここをクリックしてください。
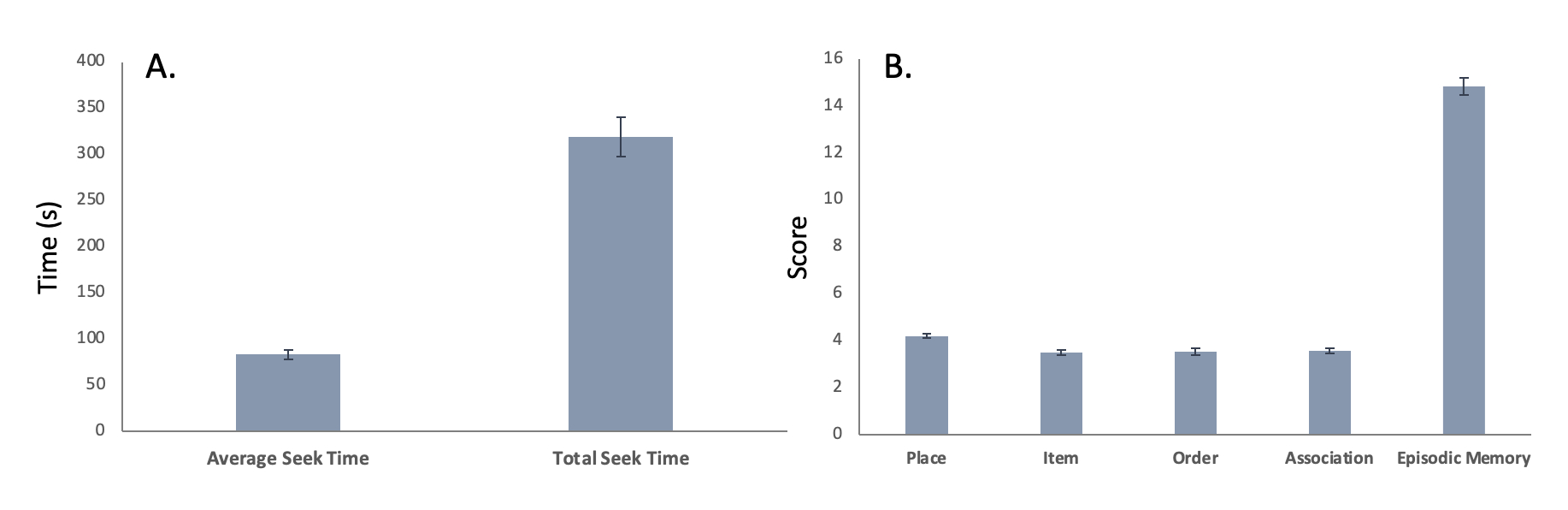{kind=link}

図6:空間ナビゲーション能力とエピソード記憶の関係。 (A)平均シーク時間、(B)総シーク時間の短縮で表される空間ナビゲーション能力の向上は、エピソード記憶スコアで表されるエピソード記憶の強化と関連している。*p < 0.001 です。 この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}
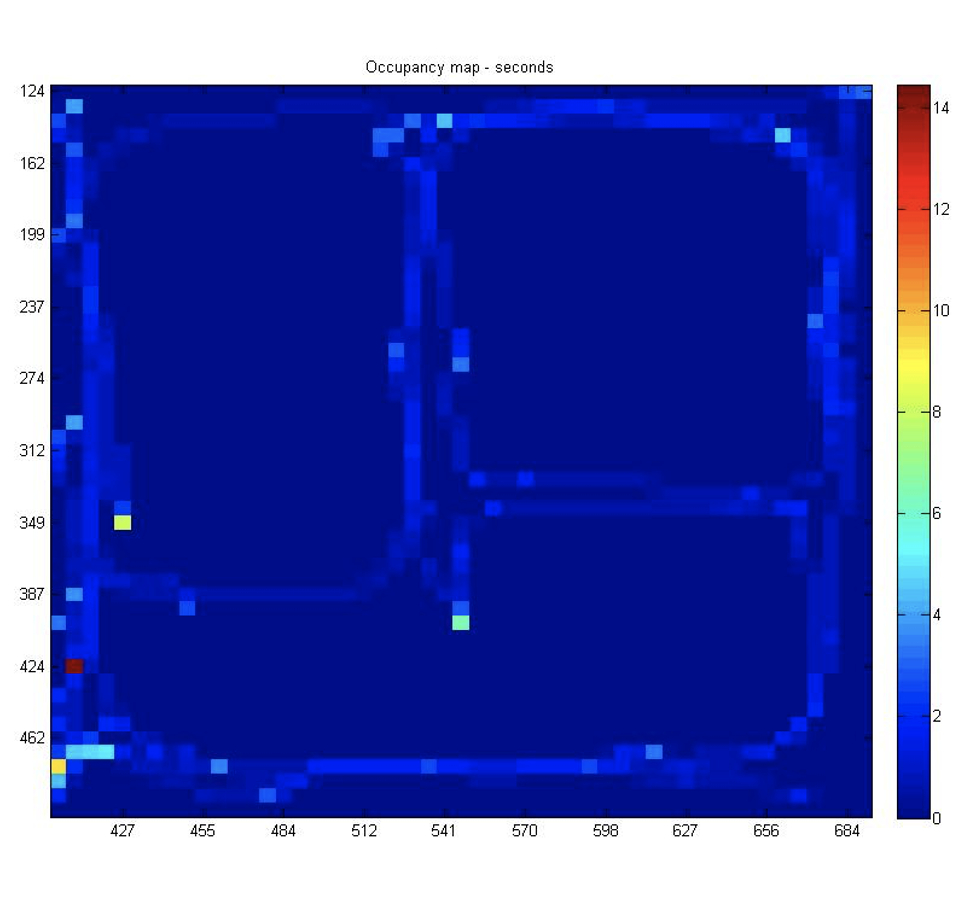
仮想空間で表されるX座標とz座標: オブジェクトモーショントラッカーアセットを使用して、この3次元仮想空間でx座標とz座標を追跡しました(補足ファイル1)。この空間ナビゲーションタスクでは、ゲーム内での上下移動(つまり、ジャンプ)が有効になっていないため、y座標は有用な情報を提供しませんでした。しかし、x座標とz座標を使用することで、参加者がゲーム全体でどのように動いたかを評価することができました。このデータに基づいて、参加者がマップ全体に移動した場所のヒートマップを視覚的に表示するようにコンピューターコードが設計されました。 図 7 は、1 人の代表参加者のヒート マップを示しており、参加者が記憶フェーズでたどったルートが強調表示されています。黄色/赤で強調表示されたスポットは、マップ上の配送(つまり、報酬)の場所に対応しています。

図7:占有率ヒートマップ。 参加者のルートを示す占有ヒートマップ。グラフの黄色/赤の部分は、参加者が頻繁に訪れた場所を表し、参加者がアイテムを配達しなければならなかった空間ナビゲーションタスクの場所(つまり、報酬の場所)に対応しています。 この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}
年齢と空間ナビゲーション能力の関係: 初期の調査では、総シーク時間によって評価された空間ナビゲーション能力は年齢と有意に関連していることが示されました(図8;r = 0.157、p = 0.045)。年齢が上がると、空間ナビゲーション能力は低下します。これは、総シーク時間の増加によって証明されます。しかし、ボンフェローニ補正が適用され、2つの相関(すなわち、合計シーク時間と平均シーク時間)についてp = 0.025で統計的有意性が評価されると、相関は有意ではなくなりました。

図8:空間ナビゲーション能力と年齢との関係。 ボンフェロンニ補正(p < 0.025)を用いて評価した場合、年齢は総シーク時間で表される空間ナビゲーション能力と有意に関連していなかった。 この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}
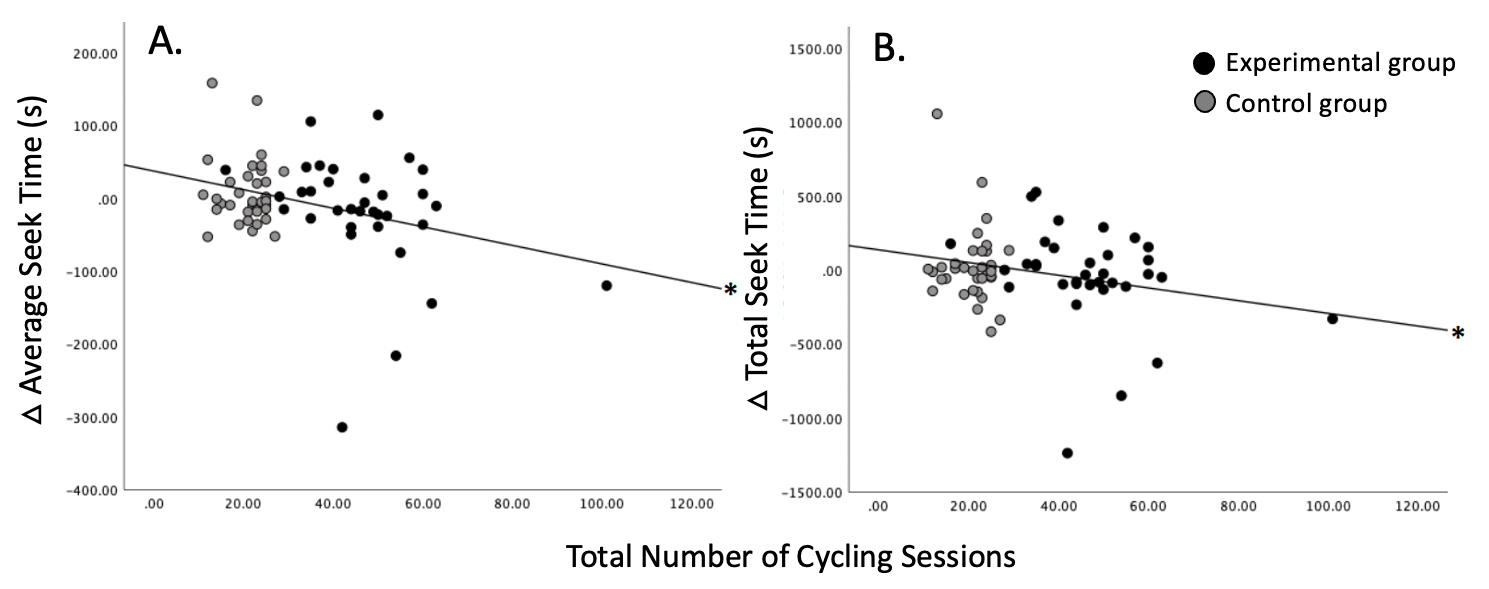
有酸素運動トレーニングと空間ナビゲーション能力の関係: 有酸素運動トレーニングは、屋内サイクリングスタジオ28で行われました。すべてのクラスは45分間で、クラスの期間中、中程度から激しい強度のサイクリングが含まれていました。参加者は、既存の運動レジメンを維持するか、運動レジメンを増やすかにランダムに割り当てられました。運動レジメンを維持した参加者は週に1〜2クラスに参加したのに対し、運動レジメンを増やした参加者は週に4〜7クラスに参加しました。参加者は、割り当てられた運動療法に 3 か月間取り組みました。空間ナビゲーションとエピソード記憶能力は、運動トレーニングの前後にテストされました。介入の詳細については、Basso et al. (2022)27 を参照してください。3ヶ月間のサイクリングクラスの総数は、平均シーク時間(図9A、r = -0.321、p = 0.007)および総シーク時間(図9B、r = -0.242、p = 0.045)と有意に関連していました。しかし、ボンフェローニ補正が適用され、2つの相関(すなわち、合計シーク時間と平均シーク時間)についてp = 0.025で統計的有意性が評価されると、合計シーク時間の相関は有意ではなくなりました。介入によるその他の知見は、Basso et al. (2022)27 で見ることができる。

図9:空間ナビゲーション能力と運動の関係。 サイクリングセッションの数が増えると、(A)平均シーク時間、(B)合計シーク時間で表される空間ナビゲーション能力の向上と関連しています。*p < 0.05.この図は、Basso et al.27の許可を得て変更されています。 この図の拡大版を表示するには、ここをクリックしてください。
{kind=link}
補足ファイル1:生データ1。 空間ナビゲーションタスクの記憶(再訪)フェーズとエピソード記憶(想起)フェーズに関する情報を含む生データ。実験の符号化および記憶段階で3次元仮想空間を移動した参加者のx座標とz座標に関するデータも提示されます。 このファイルをダウンロードするには、ここをクリックしてください。
補足ファイル2:生データ2。 開始時間、終了時間、平均シーク時間、場所スコア、アイテムスコア、注文スコア、関連付けスコア、エピソード記憶スコアを決定するための計算(赤で表示)を含む生データ。 このファイルをダウンロードするには、ここをクリックしてください。
ディスカッション
この研究では、人間の空間ナビゲーションの評価における新しいバーチャルリアリティタスクの有効性を調査しました。この認知課題は、完了までに約10分しかかかりませんが、空間ナビゲーションとエピソード記憶能力という2つのユニークなタイプの海馬依存性認知を評価するために利用できます。重要なことに、空間ナビゲーション能力はエピソード記憶能力と有意に関連していました。最後に、このタスクは身体活動トレーニングのパラダイムに敏感でした。つまり、運動量の増加はパフォーマンスの向上と関連していました。この課題は、薬剤耐性てんかん患者の仮想環境と、発作の局在化を目的として配置された海馬深電極を調査したMillerら(2013)の研究に触発されました。彼らは、空間ナビゲーションタスクの習熟段階(すなわち、符号化段階)の間に、海馬および関連する内側側頭葉構造の位置応答性細胞が活性化されることを発見した22。さらに、参加者が自由想起コンポーネント(つまり、能動的ナビゲーションを伴わない記憶段階)に関与している場合、符号化中に活性であったのと同じ場所応答細胞が再び活性になることを発見しました。オープンフィールドや迷路のような環境を利用したげっ歯類の現存する研究では、そのような場所細胞の存在が示されており、この発見により、John O'Keefe博士、May-Britt Moser博士、Edvard Moser博士が2014年のノーベル生理学・医学賞を受賞しています2,29,30,31。さらに、ヒトの仮想環境を用いた研究では、ヒトの海馬の類似の細胞が時間と空間を移動することをコード化していることが示されている22,32,33。このタスクは、Miller et al. (2013) など 22,34,35,36,37,38 で提示されたものと似ていますが、最新のクロスプラットフォーム ゲーム エンジンとテクノロジを使用して開発され、移動する雲や明確な都市のランドマークや店舗の特徴などの現実世界の機能を利用しています。他の研究者は、人間の他の空間ナビゲーションタスクを利用しています。ただし、これらのタスクは生態学的妥当性に制限があります。たとえば、仮想の Starmaze タスクはナビゲーション能力を評価するために使用されますが、参加者は星型の迷路 39,40,41,42,43,44 に配置されます。さらに、NavWellは、げっ歯類のMorris Water Maze(参加者を円形のアリーナに配置する)に似た空間ナビゲーションおよび記憶実験をホストし、開発者に環境45を構築するための基本的な幾何学的形状を提供するアクセス可能なプラットフォームである。さらに、クロスプラットフォームゲームエンジン上のLandmarksアセットは、正方形の設定12に存在する空間ナビゲーションタスクを構築し、開発するために利用可能である。現在のタスクは、都市景観をナビゲートし、ランドマークやアクションを記憶するという、現実世界と同様の設定とタスクをユーザーに提供するという点でユニークです。このタスクは、空間ナビゲーションに加えてエピソード記憶を評価するという点で、仮想のStarmazeタスクやNavWellとも異なります。
この課題では、空間ナビゲーション能力はエピソード記憶能力と有意に関連していました。他の人々は、これら2つの認知能力が実際に異なり、海馬の異なる領域に依存していることを示している38,46。一般的な「認知地図理論」は、脳が個人の空間環境の「地図」を構築して保存し、それが将来行動や行動を導くために将来使用できるようにすると述べています47。研究によると、海馬は空間情報をエンコードすると同時に、エピソード記憶の形成もサポートしていることが示唆されています。より具体的には、右の海馬は空間記憶をコード化し、左の海馬はエピソード記憶を記憶していると考えられている38。空間記憶とエピソード記憶との明確な関連性を示す現在の新しい空間ナビゲーション課題の結果は、認知地図理論を支持し、この課題が非臨床集団における空間ナビゲーションとエピソード記憶との関係を調べるために使用できる可能性があることを示唆しています。今後の研究では、軽度認知障害、アルツハイマー病、その他のタイプの認知症などの神経変性疾患を持つ人々を含む臨床集団でこの関係を調べる必要があります。
このタスクは、運動または3か月間に行われたサイクリングセッションの合計量に敏感でした。げっ歯類を用いたこれまでの研究では、長期記憶、パターン分離、自発的交代、文脈的恐怖条件付け、受動的回避学習、新規物体認識など、運動が海馬依存性認知を増加させる最も強力な方法の1つであり、この効果は運動による海馬神経新生の増加に依存していることが示されている48,49,50.さらに、文献によると、長期的な運動は人間の海馬機能を強化し、単語リストの想起、物語の想起、および空間的および非空間的な関係記憶の両方に改善が見られます。この効果は、運動による海馬の容積の増加によって引き起こされると考えられています7,27,51,52,53,54,55。この新しい空間ナビゲーション課題は、げっ歯類の発見を補完し、人間の文献に追加し、空間ナビゲーション能力に対する身体活動の重要性を示しています。
初期の調査では、年齢は空間ナビゲーション能力と負の関連がありましたが、ボンフェローニ補正を適用すると、この影響は排除されました。これは、空間ナビゲーション能力が55歳まで維持される可能性があることを示しています。他の文献では、空間ナビゲーションは56,57,58歳とともに低下する認知能力であることが示されています。ニューロイメージング研究により、海馬、海馬傍回、後帯状皮質(後脾皮質)、頭頂葉、前頭前野などの領域における加齢性神経変性が、このような加齢性認知機能低下に関与している可能性があることが明らかになった58。年齢範囲が限られていたこと(25〜55歳)を考慮すると、より広い年齢範囲、特に高齢者(65+)を含めることにより、将来の研究者は年齢と空間ナビゲーション能力との間に有意な相関関係を見るかもしれません。今後の研究では、65歳以上の成人や、軽度認知障害やその他の認知症様障害のある人でも、この空間ナビゲーションタスクを行うことを検討すべきである。
バーチャルナビゲーションタスクに欠けている明らかなリンクの1つは、身体と脳の関係の欠如です。つまり、現実世界の環境をナビゲートする際には、固有受容器、外部受容器、内受容器、前庭系、感覚運動皮質、大脳基底核、小脳などの活性化を含む、末梢神経系と中枢神経系のレベルで活性化が起こります。この物理的な入力がないと、仮想ナビゲーションは物理的なナビゲーションとは明らかに異なる可能性があります。それにもかかわらず、研究は、仮想環境が現実世界のナビゲーション22,32,33と同じ脳領域を刺激することを示している。現在のタスクの設計がそうであったように、タスクをよりアクティブにすることで、脳が時間と空間を物理的に移動し、自然な空間ナビゲーションを模倣していることを脳に納得させるのに役立つかもしれません。また、この仮説を支持する人もいる。Meade et al. (2019) による研究では、同様の仮想空間ナビゲーション タスク59 を使用しながら、アクティブ エンコーディングとパッシブ エンコーディングの違いを調査しました。アクティブナビゲーションとは、参加者が仮想空間内を自分で移動できることを指し(本研究と同様)、パッシブナビゲーションは、参加者が移動せず、ナビゲーションルートを示すガイド付きツアーで構成されています。著者たちは、アクティブナビゲーションは、身体的要素(移動運動や固有受容感覚など)と認知的要素(意思決定や注意力など)が関与しているため、高齢者にとってより有益であり、記憶符号化のプロセスに直接関与することで記憶能力を向上させるのに役立つ可能性があるという考えを示している。本研究で利用されたアクティブナビゲーションは、結果を説明でき、参加者が自分の経験のエピソード記憶を正確に思い出すことができたことを実証しています。
アクティブナビゲーションは、後脾臓複合体(RSC)60,61,62のような多感覚統合領域を関与させるのにも役立つかもしれない。最近の研究では、参加者が自宅やランドマークの場所を記憶しながら場所間を移動する必要があるバーチャルリアリティ空間ナビゲーションタスク中の実際の歩行は、RSCシータ振動(すなわち、EEGで記録された4〜8ヘルツのニューロン振動)をもたらすことがわかりました16。この増加したシータパワーは、頭の方向の変更と回転中に最も顕著でした。げっ歯類では、RSCシータ活性がグリッドセルを含む空間コーディングと頭部方向計算に不可欠であることが示されている63,64。RSCは、環境からの手がかりを使用して人間の認知マップ47を固定するためにも重要であると考えられている。
仮想空間ナビゲーションタスクには多くの利点がありますが、個人が時間と空間を物理的に移動することを妨げ、固有受容システム、前庭システム、および感覚運動システムの活性化を制限します。感覚プロセスと運動プロセスの間には不一致が存在し、一部の参加者はめまいや吐き気を引き起こす可能性があります。現在のタスクでは、参加者が環境を移動して周囲を見回すことができる速度を制御することにより、これは制限されました。環境のすべての側面をエンコードできるようにするには、周囲を見回す(つまり、仮想の頭の回転に従事する)ことができなければなりませんでした。ただし、この能力は、参加者が身体的に病気にならないように十分に遅くする必要がありました。それにもかかわらず、座りがちな状態で空間的に移動できる能力は、研究者が可動性の問題、身体的疲労、または個人が歩行するのを妨げるその他の障害を経験した個人を研究できるという点で有利です。もう一つの制限は、このタスクの信頼性と妥当性についてまだテストされていないのに対し、仮想空間ナビゲーション評価(VSNA)65を含む他のタスクはこの方向に進んでいることである。将来の研究では、参加者がこの空間ナビゲーションタスクを完了しながら、脳波計または機能的磁気共鳴画像法を通じて関連する神経活動を調べることができます。参加者には、心拍変動や皮膚電気活動などの生理学的変数を測定するデバイスを装着することもできます。これにより、仮想環境をナビゲートする際に発生する周辺メカニズムと中央メカニズムの両方を調べることができます。重要なことは、このタスクを使用して、時間の経過に伴う空間ナビゲーション能力の変化を評価できることです。今後の研究では、この課題を利用して、アルツハイマー病やパーキンソン病などの老化や神経変性疾患が個人の空間ナビゲーションやエピソード記憶にどのような影響を与えるかを調査することができるかもしれません。逆に、この課題は、追加の心身運動介入が、ダンス、ヨガ、瞑想などの空間ナビゲーションとエピソード記憶にどのように影響するかを調査するために使用できます。
開示事項
著者は報告すべき開示を持っていません。
謝辞
この研究は、NIHのNational Center for Advancing Translational Sciences(UL1TR003015 および KL2TR003016)が一部支援しているiTHRIV Scholars Programによって支援されました。サミュエル・マッケンジー博士、マイケル・アストルフィ氏、ミート・パレク氏、アンドレイ・マークス氏のコンピュータプログラミングへの貢献に感謝いたします。
資料
| Name | Company | Catalog Number | Comments |
| Unity Real-Time Development Platform | Unity | Unity Student / Unity Personal | https://unity.com/ |
参考文献
- Maguire, E. A., Burgess, N., O'Keefe, J. Human spatial navigation: cognitive maps, sexual dimorphism, and neural substrates. Current Opinion in Neurobiology. 9 (2), 171-177 (1999).
- Buzsáki, G., Moser, E. I. Memory, navigation and theta rhythm in the hippocampal-entorhinal system. Nature Neuroscience. 16 (2), 130-138 (2013).
- Robinson, N. T. M., et al. Targeted activation of hippocampal place cells drives memory-guided spatial behavior. Cell. 183 (7), 2041-2042 (2020).
- Fordyce, D. E., Farrar, R. P. Physical activity effects on hippocampal and parietal cortical cholinergic function and spatial learning in F344 rats. Behavioural Brain Research. 43 (2), 115-123 (1991).
- van Praag, H. Neurogenesis and exercise: past and future directions. Neuromolecular Medicine. 10 (2), 128-140 (2008).
- Heo, S., et al. Resting hippocampal blood flow, spatial memory and aging. Brain Research. 1315, 119-127 (2010).
- Erickson, K. I., et al. Exercise training increases size of hippocampus and improves memory. Proceedings of the National Academy of Sciences of the United States of America. 108 (7), 3017-3022 (2011).
- Dobbels, B., et al. The virtual Morris water task in 64 patients with bilateral vestibulopathy and the impact of hearing status. Frontiers in Neurology. 11, 710 (2020).
- Moffat, S. D., Hampson, E., Hatzipantelis, M. Navigation in a "Virtual" maze: Sex Differences and correlation with psychometric measures of spatial ability in humans. Evolution and Human Behavior. 19 (2), 73-87 (1998).
- Ijaz, K., Ahmadpour, N., Naismith, S. L., Calvo, R. A. An immersive virtual reality platform for assessing spatial navigation memory in predementia screening: Feasibility and usability study. JMIR Mental Health. 6 (9), 13887 (2019).
- Sakhare, A. R., Yang, V., Stradford, J., Tsang, I., Ravichandran, R., Pa, J. Cycling and spatial navigation in an enriched, immersive 3d virtual park environment: A feasibility study in younger and older adults. Frontiers in Aging Neuroscience. 11, 218 (2019).
- Starrett, M. J., et al. Landmarks: A solution for spatial navigation and memory experiments in virtual reality. Behavior Research Methods. 53 (3), 1046-1059 (2021).
- Diersch, N., Wolbers, T. The potential of virtual reality for spatial navigation research across the adult lifespan. The Journal of Experimental Biology. 222, 187252 (2019).
- Kuhrt, D., St John, N. R., Bellmund, J. L. S., Kaplan, R., Doeller, C. F. An immersive first-person navigation task for abstract knowledge acquisition). Scientific Reports. 11 (1), 5612 (2021).
- Castelli, L., Latini Corazzini, L., Geminiani, G. C. Spatial navigation in large-scale virtual environments: Gender differences in survey tasks. Computers in Human Behavior. 24 (4), 1643-1667 (2008).
- Do, T. -. T. N., Lin, C. -. T., Gramann, K. Human brain dynamics in active spatial navigation. Scientific Reports. 11 (1), 13036 (2021).
- Jungnickel, E., Gramann, K. Mobile brain/body imaging (MoBI) of physical interaction with dynamically moving objects. Frontiers in Human Neuroscience. 10, 306 (2016).
- Park, J. L., Dudchenko, P. A., Donaldson, D. I. Navigation in real-world environments: New opportunities afforded by advances in mobile brain imaging. Frontiers in Human Neuroscience. 12, 361 (2018).
- Bettio, L. E. B., Rajendran, L., Gil-Mohapel, J. The effects of aging in the hippocampus and cognitive decline. Neuroscience and Biobehavioral Reviews. 79, 66-86 (2017).
- Wang, Z., van Praag, H., Boecker, H., Hillman, C., Scheef, L., Struder, H. Exercise and the Brain: Neurogenesis, Synaptic Plasticity, Spine Density, and Angiogenesis. Functional Neuroimaging in Exercise and Sport Sciences. , (2012).
- . Unity Real-Time Development Platform. Unity Available from: https://unity.com/ (2023)
- Miller, J. F., et al. Neural activity in human hippocampal formation reveals the spatial context of retrieved memories. Science. 342 (6162), 1111-1114 (2013).
- Urban construction pack. Unity asset store. At Available from: https://assetstore.unity.com/packages/3d/environments/urban-construction-pack-8081#reviews (2018)
- . Object Motion Tracker. Unity Available from: https://forum.unity.com/threads/object-motion-traker-engine-trails-time-travel-game-mechanics-and-more.241544/ (2014)
- Makoto's preprocessing pipeline. EEGLAB Available from: https://sccn.ucsd.edu/wiki/Makotos_preprocessing_pipeline (2023)
- Faul, F., Erdfelder, E., Buchner, A., Lang, A. -. G. Statistical power analyses using G*Power 3.1: tests for correlation and regression analyses. Behavior Research Methods. 41 (4), 1149-1160 (2009).
- Basso, J. C., et al. Examining the effect of increased aerobic exercise in moderately fit adults on psychological state and cognitive function. Frontiers in Human Neuroscience. 16, 833149 (2022).
- Keefe, J. O., Nadel, L. . The Hippocampus as a Cognitive Map. , (1978).
- Eichenbaum, H. The Hippocampus as a Cognitive Map . . . of Social Space. Neuron. 87 (1), 9-11 (2015).
- Moser, E. I., Kropff, E., Moser, M. -. B. Place cells, grid cells, and the brain's spatial representation system. Annual Review of Neuroscience. 31, 69-89 (2008).
- Ekstrom, A. D., et al. Cellular networks underlying human spatial navigation. Nature. 425 (6954), 184-188 (2003).
- Jacobs, J., Kahana, M. J., Ekstrom, A. D., Mollison, M. V., Fried, I. A sense of direction in human entorhinal cortex. Proceedings of the National Academy of Sciences of the United States of America. 107 (14), 6487-6492 (2010).
- Spiers, H. J., Burgess, N., Hartley, T., Vargha-Khadem, F., O'Keefe, J. Bilateral hippocampal pathology impairs topographical and episodic memory but not visual pattern matching. Hippocampus. 11 (6), 715-725 (2001).
- Spiers, H. J., et al. Unilateral temporal lobectomy patients show lateralized topographical and episodic memory deficits in a virtual town. Brain. 124, 2476-2489 (2001).
- Maguire, E. A., Burgess, N., Donnett, J. G., Frackowiak, R. S., Frith, C. D., O'Keefe, J. Knowing where and getting there: a human navigation network). Science. 280 (5365), 921-924 (1998).
- King, J. A., Burgess, N., Hartley, T., Vargha-Khadem, F., O'Keefe, J. Human hippocampus and viewpoint dependence in spatial memory. Hippocampus. 12 (6), 811-820 (2002).
- Burgess, N., Maguire, E. A., O'Keefe, J. The human hippocampus and spatial and episodic memory. Neuron. 35 (4), 625-641 (2002).
- Laidi, C., et al. Preserved navigation abilities and spatio-temporal memory in individuals with autism spectrum disorder. Autism Research. 16 (2), 280-293 (2023).
- Iglói, K., Zaoui, M., Berthoz, A., Rondi-Reig, L. Sequential egocentric strategy is acquired as early as allocentric strategy: Parallel acquisition of these two navigation strategies. Hippocampus. 19 (12), 1199-1211 (2009).
- Bullens, J., Iglói, K., Berthoz, A., Postma, A., Rondi-Reig, L. Developmental time course of the acquisition of sequential egocentric and allocentric navigation strategies. Journal of Experimental Child Psychology. 107 (3), 337-350 (2010).
- Bellassen, V., Iglói, K., de Souza, L. C., Dubois, B., Rondi-Reig, L. Temporal order memory assessed during spatiotemporal navigation as a behavioral cognitive marker for differential Alzheimer's disease diagnosis. The Journal of Neuroscience. 32 (6), 1942-1952 (2012).
- Iglói, K., et al. Interaction between hippocampus and cerebellum crus I in sequence-based but not place-based navigation. Cerebral Cortex. 25 (11), 4146-4154 (2015).
- Iglói, K., Doeller, C. F., Berthoz, A., Rondi-Reig, L., Burgess, N. Lateralized human hippocampal activity predicts navigation based on sequence or place memory. Proceedings of the National Academy of Sciences of the United States of America. 107 (32), 14466-14471 (2010).
- Commins, S., et al. NavWell: A simplified virtual-reality platform for spatial navigation and memory experiments. Behavior Research Methods. 52 (3), 1189-1207 (2020).
- Fan, C. L., Abdi, H., Levine, B. On the relationship between trait autobiographical episodic memory and spatial navigation. Memory & Cognition. 49 (2), 265-275 (2021).
- Epstein, R. A., Patai, E. Z., Julian, J. B., Spiers, H. J. The cognitive map in humans: spatial navigation and beyond. Nature Neuroscience. 20 (11), 1504-1513 (2017).
- van Praag, H., Kempermann, G., Gage, F. H. Running increases cell proliferation and neurogenesis in the adult mouse dentate gyrus. Nature Neuroscience. 2 (3), 266-270 (1999).
- van Praag, H., Christie, B. R., Sejnowski, T. J., Gage, F. H. Running enhances neurogenesis, learning, and long-term potentiation in mice. Proceedings of the National Academy of Sciences of the United States of America. 96 (23), 13427-13431 (1999).
- Voss, M. W., Soto, C., Yoo, S., Sodoma, M., Vivar, C., van Praag, H. Exercise and hippocampal memory systems. Trends in Cognitive Sciences. 23 (4), 318-333 (2019).
- Jennen, L., Mazereel, V., Lecei, A., Samaey, C., Vancampfort, D., van Winkel, R. Exercise to spot the differences: a framework for the effect of exercise on hippocampal pattern separation in humans. Reviews in the Neurosciences. 33 (5), 555-582 (2022).
- Griffin, &. #. 2. 0. 1. ;. W., Mullally, S., Foley, C., Warmington, S. A., O'Mara, S. M., Kelly, A. M. Aerobic exercise improves hippocampal function and increases BDNF in the serum of young adult males. Physiology & Behavior. 104 (5), 934-941 (2011).
- Firth, J., et al. Effect of aerobic exercise on hippocampal volume in humans: A systematic review and meta-analysis. NeuroImage. 166, 230-238 (2018).
- Voss, M. W., Vivar, C., Kramer, A. F., van Praag, H. Bridging animal and human models of exercise-induced brain plasticity. Trends in Cognitive Sciences. 17 (10), 525-544 (2013).
- Pereira, A. C., et al. An in vivo correlate of exercise-induced neurogenesis in the adult dentate gyrus. Proceedings of the National Academy of Sciences of the United States of America. 104 (13), 5638-5643 (2007).
- vander Ham, I. J. M., Claessen, M. H. G. How age relates to spatial navigation performance: Functional and methodological considerations. Ageing Research Reviews. 58, 101020 (2020).
- Zhong, J. Y., Moffat, S. D. Extrahippocampal contributions to age-related changes in spatial navigation ability. Frontiers in Human Neuroscience. 12, 272 (2018).
- Moffat, S. D. Aging and spatial navigation: what do we know and where do we go. Neuropsychology Review. 19 (4), 478-489 (2009).
- Meade, M. E., Meade, J. G., Sauzeon, H., Fernandes, M. A. Active navigation in virtual environments benefits spatial memory in older adults. Brain Sciences. 9 (3), 47 (2019).
- Powell, A., et al. Stable encoding of visual cues in the mouse retrosplenial cortex. Cerebral Cortex. 30 (8), 4424-4437 (2020).
- Fischer, L. F., Mojica Soto-Albors, R., Buck, F., Harnett, M. T. Representation of visual landmarks in retrosplenial cortex. eLife. 9, 51458 (2020).
- Stacho, M., Manahan-Vaughan, D. Mechanistic flexibility of the retrosplenial cortex enables its contribution to spatial cognition. Trends in Neurosciences. 45 (4), 284-296 (2022).
- Yoder, R. M., Clark, B. J., Taube, J. S. Origins of landmark encoding in the brain. Trends in Neurosciences. 34 (11), 561-571 (2011).
- Lozano, Y. R., Page, H., Jacob, P. -. Y., Lomi, E., Street, J., Jeffery, K. Retrosplenial and postsubicular head direction cells compared during visual landmark discrimination. Brain and Neuroscience Advances. 1, 2398212817721859 (2017).
- Ventura, M., Shute, V., Wright, T., Zhao, W. An investigation of the validity of the virtual spatial navigation assessment. Frontiers in Psychology. 4, 852 (2013).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved