
Method Article
Tracking-Infiltration, die vorderen Tiefe mit Zeitraffer Multi-Offset sammelt mit Array Antenne Bodenradars gesammelt
In diesem Artikel
Zusammenfassung
Hier präsentieren wir ein Ground Penetrating Radar (GPR) System basiert auf einem Boden zusammen, dicht besiedelten Antenne-Array für die Überwachung des dynamischen Prozesses der Untergrund Wasserinfiltration. Ein Time-Lapse Radarbild der infiltrationsprozess erlaubt schätzen die Tiefe der Benetzung Front im Laufe des Prozesses Infiltration.
Zusammenfassung
Ein Ground Penetrating Radar (GPR) System basierend auf einem Boden zusammen, dicht besiedelten Antenne Array wurde verwendet, um Daten zu sammeln, während ein Infiltration Experiment auf einem Testgelände in der Nähe von Tottori Sanddüne, Japan. Die in dieser Studie verwendeten Antennenstation besteht aus 10 Sendeantennen (Tx) und 11 Empfangsantennen (Rx). Für dieses Experiment wurde das System so konfiguriert, dass alle mögliche Tx-Rx Paarungen, was in einer Multi-Offset zu sammeln (MOG) bestehend aus 110 Tx-Rx-Kombinationen verwenden. Das Array an eine Position direkt über dem Filterbereich stationäre blieb und Daten alle 1,5 Sekunden einen zeitbasierte Trigger verwenden. Gemeinsamen-Offset zu sammeln (COG) und gemeinsamen Mittelpunkt (CMP) Datencubes wurden während der Nachbearbeitung aus den MOG Daten rekonstruieren. Gab es nur wenige Studien, die Time-Lapse CMP-Daten verwendet, um Veränderungen der Ausbreitungsgeschwindigkeit zu schätzen. In dieser Studie schätzte die elektromagnetischen (EM) Wellengeschwindigkeit heuristisch im 1-Minuten-Takt aus der rekonstruierten CMP-Daten durch Kurve passend, unter Verwendung der Gleichung der Hyperbel. Dann gingen wir in die Tiefe der Benetzung Front zu berechnen. Die Entwicklung der Benetzung vorne im Laufe der Zeit erhalten durch diese Methode steht im Einklang mit den Beobachtungen aus einer Bodenfeuchtesensor, die in einer Tiefe unter 20 cm platziert wurde. Die Ergebnisse dieser Studie zeigen die Möglichkeit solche Arrays GPR System, einen Untergrund dynamischen Prozess wie Infiltration präzise und quantitativ Wasser zu überwachen.
Einleitung
Verständnis Masse und Energie Transportprozesse in der ungesättigten Zone sind wichtig für viele Anwendungen in der Agrar- und Umweltpolitik Disziplinen. Zwischen diesen Prozessen variabel gesättigte Wasser-Strömung ist der wesentliche Prozess als viele andere Prozesse, wie physikalische, geochemische, biologische und auch mechanische Prozesse, sind in der Regel mit Wasser verbunden. Neuentwicklungen in der geophysikalischen Techniken ermöglichten eine hydrologische Prozesse in der ungesättigten Zone nicht-invasiv zu überwachen. Unter vielen geophysikalischer Techniken ist Ground penetrating Radar (GPR) eines der am weitesten verbreiteten Verfahren zu überwachen und zu Boden Wasserdynamik zu charakterisieren, da die Ausbreitung von elektromagnetischen (EM) Wellen abgestrahlt und von GPR-Antennen empfangen wird gekennzeichnet durch Boden Feuchtigkeit Inhalt1,2,3,4. Unter den verfügbaren Systemen ist Bodenoberfläche GPR (Oberfläche GPR in den Rest des Manuskripts genannt) die häufigste, in einem Feld zu verwenden. Traditionelle GPR Oberflächensysteme mit einem Sender und einem Empfänger (bistatischen Radarsysteme) werden häufig verwendet, um den Untergrund mit einer Konstanten Sender-Empfänger-Trennung (Versatz) zu scannen. In dieser Konfiguration erfassten Datensätze sind auch bekannt als gemeinsame Versatz (COG) sammelt. Radar-Daten werden als Zeitreihen basierend auf gesamte Fahrzeit zwischen Sender, eventuelle Reflektoren und zurück zum Empfänger angezeigt. Um die Fahrzeit konvertieren Tiefeninformationen, EM Wellengeschwindigkeit im Untergrund muss geschätzt werden. Beispielsweise kann dies durch die Analyse von Multi-offset Gather (MOG) Datensätze5erfolgen.
Zwar gab es eine Reihe von Studien, die Überwachung von unterirdischen Versickerung Prozesse6,7,8,9mit GPR, bestimmt keiner von ihnen direkt die Position des vorderen Benetzung oder die EM-Welle Geschwindigkeitsstruktur, die mit der Zeit während Infiltration verändert. Das gemeinsame Vorgehen soll Objekte begraben in bekannten tiefen als Referenz Reflektoren durchschnittliche EM Wellengeschwindigkeit bestimmen und Benetzung der vorderen Tiefe zu verwenden. Da die Benetzung Front während Infiltration dynamisch ändert, muss Zeitraffer MOG in kurzen Zeitabständen auf Änderungen in der EM-Wellen-Geschwindigkeit-Struktur zu nutzen, ohne Verwendung von Referenzobjekten gesammelt werden. Mit gemeinsamen bistatischen Oberfläche GPR-Antennen ist die Sammlung von Zeitraffer MOG in kurzen Abständen untereinander erschweren oder unmöglich machen, wie es erfordert, Antennen, um die verschiedenen Offset Konfigurationen einrichten manuell bewegen. Vor kurzem, eine Familie von Antennengruppe GPR (bezeichnet als Array GPR nachstehend) ausgiebig wurde zur Untergrund schnell und exakt10Bild. Das Grundkonzept des Arrays ist GPR die dichten Schwaden mit minimalem Aufwand durch elektronisch Schalten mehrerer Antennen in einem einzigen Rahmen montiert. Array-GPR-Systeme wurden vor allem zur Untergrund 3D-Bilder von weiten Bereichen schnell zu erzeugen. Einige Beispiele für typische Anwendungen für diese Systeme sind Straßen- und Brückenbau Inspektion11, archäologische Prospektion12 und Blindgänger und Landmine Detection13,14. Für solche Zwecke dient das Array GPR vor allem Scannen Sie den Untergrund mit einer Konstanten Antenne Trennung Konfiguration, COG zu sammeln. Obwohl nachgewiesen wurde, dass MOG mit einer Reihe gesammelt, die GPR für Geschwindigkeit Schätzung15verwendet werden könnten, wurde die praktische Anwendung dieser Methodik auf wenige Fälle beschränkt. Durch die Platzierung der Antenne-Array an einem festen Standort, kann Zeit verstrichen MOG leicht gesammelt werden. Wie in unserer jüngsten Publikation16, Schildern, Zeitraffer radargramme gesammelt mit dem Array GPR System ziemlich eindeutig Reflexion Signale von vorne Benetzung wie es langsam nach unten während eines Experimentes vertikale Infiltration bewegt sich auf einer Sanddüne durchgeführt. Das Hauptziel des Papiers war wie das GPR-Array verwenden, um Zeitraffer MOG während der Infiltration Test sammeln und Analysieren dieser Daten für die Verfolgung von der Tiefe der Benetzung Front zu demonstrieren.
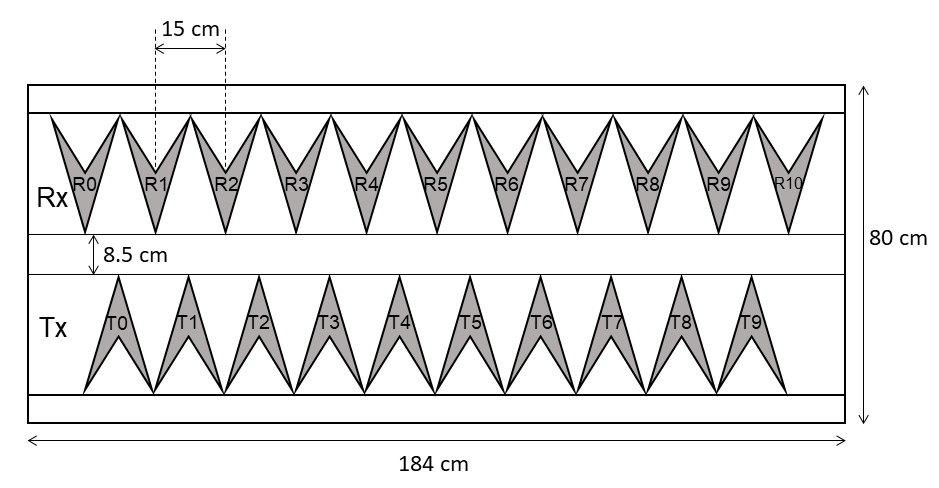
In dieser Studie verwendeten wir eine Antennengruppe bestehend aus 10 übertragen (Tx0 - Tx9) und 11 (Rx0 - Rx10) empfangen Fliege Monopole Antennen. Die Verschiebung der Antennenelemente im Array ist in Abbildung 1 dargestellt (siehe Tabelle der Materialien). Die Antennenstation erfolgt durch eine Schrittfrequenz kontinuierliche Wellenform (SFCW) Radareinheit über den Frequenzbereich von 100 MHz auf 3.000 MHz in Betrieb. Die Array-GPR-Schalter durch eine Benutzer-definierte Abfolge von Rx-Tx-Paare mit Radiofrequenz (RF) Multiplexer in die Antenne Array10. Die maximale Anzahl von Tx-Rx-Kombinationen für dieses System ist 110. Für dieses Experiment konfiguriert wir das Array GPR, verwenden alle 110 Kombinationen, die Scan-Sequenz programmieren, so dass jeder Sender aus Tx0, Tx9, nacheinander mit allen 11 Empfänger von Rx0 Rx10 gepaart war. Die notwendige Zeit, um einen Scan durch alle 110 Kombinationen durchführen ist weniger als 1,5 Sekunden. Der Abstand zwischen Sender und Empfänger wurde basierend auf den Abstand zwischen den feed der Antennenelemente berechnet wo der vertikale Versatz 85 mm ist, wie in Abbildung 1dargestellt.
Protokoll
Das Hauptziel dieser Studie war es, ein Array GPR System verwenden, um Untergrund dynamische Prozesse zu visualisieren wie z. B. Eindringen von Wasser, es ist auch wichtig zu beschreiben, wie die Infiltration Test durchgeführt wurde.
(1) Infiltration Feldtest
- Wählen Sie einen Standort mit einer blanken Oberfläche für die Infiltration-Test.
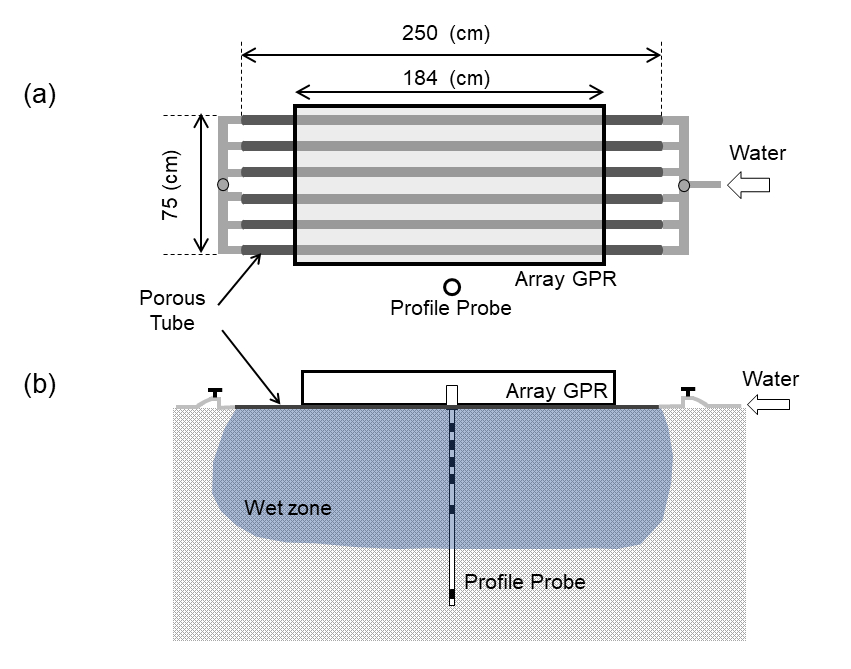
Hinweis: Für diese Studie wurde in einem großen Gewächshaus der ariden Land Research Center von Tottori Universität, Japan der Infiltration-Test durchgeführt. Die jüngste Veröffentlichung für mehr Details16zu sehen. - Position auf der Oberfläche sechs 2,5 m lange poröse Rohre Parallel in einem Abstand von 15 cm zwischen einander, um eine einheitliche Infiltration (Abbildung 2) zu gewährleisten.
- Verbinden Sie ein Ende der Röhre zu einer geregelten ventileinlass, die zu einem Wasserreservoir oder an einen Wasserhahn angeschlossen ist, und das andere Ende an eine Steckdose, um überschüssiges Wasser zu entfernen.
- Legen Sie eine dünne 910 x 1802 mm2 Holzplatte (etwas größer als die Antennenstation), um die poröse Schläuche zu decken.
- Überprüfen Sie die Wirkung von der Holzplatte auf dem Radarsignal vor dem Eindringen-Test.
- Installieren Sie Boden Feuchte-Sensoren direkt neben der Holzplatte, Veränderungen in der Bodenfeuchte in verschiedenen Tiefen zu beobachten.
Hinweis: Diese Sensoren soll Referenzdaten zur Gegenprüfung der Ergebnisse aus der Analyse der GPR-Daten zur Verfügung stellen. In dieser Studie wurde ein Stab-Typ Bodenfeuchtesensor (siehe Tabelle der Materialien) neben der Antenne zu überwachen, die Boden-Dielektrizitätskonstante bei 10, 20, 30, 40, 60 und 100 cm Tiefe installiert.
(2) GPR-Messung
- Stellen Sie die Array-GPR-Antenne auf der Holzplatte.
Hinweis: In dieser Studie wurde die Antenne stationär zur Sicherstellung der Konsistenz in der aufgezeichneten Signale gelassen. - Schließen Sie die Antenne an den Controller mit Koaxialkabel.
- Verbinden Sie den Controller an einem Laptop-PC mit einem Ethernet-Kabel.
- Entscheiden Sie die antennenkombinationen und deren Reihenfolge um sicherzustellen, dass gemeinsame Offset Gather (COG) und Multi-offset sammeln (MOG) nahtlos erhoben werden.
Hinweis: In dieser Studie wurde alle möglichen Kombinationen für das Array GPR zur Verfügung verwendet (110). Es dauerte weniger als 1,5 s, um einen vollständigen Scan durch alle Kombinationen durchführen. - Starten Sie die Aufnahme der GPR-Daten mit Hilfe der Datenerfassungs-Software.
Hinweis: Es ist wichtig, die Datenerfassung zu starten, bevor Wasser in die poröse Rohre eingespritzt wird. - Öffnen Sie das Ventil um Wasser anzuwenden (d.h., die Infiltration zu beginnen).
Hinweis: Die Injektionsrate Wasser in den Untergrund kann aus den hydraulischen Eigenschaften (z. B. Hydraulische Leitfähigkeit) des Bodens Ziel ermittelt werden. Die Durchflussmenge in dieser Studie verwendeten war 7.000 cm3/min, die weniger als der gesättigten hydraulischen Leitfähigkeit der Dünensand. - Nachdem eine vorbestimmte Menge Wasser eingespritzt wird, schließen Sie das Ventil.
Hinweis: Wasser für 4 h kontinuierlich injiziert wurde und insgesamt 1.680 Liter Wasser wurden für den Test verwendet. - Scannen Sie halten Sie mit dem Array GPR für einen weiteren Zeitraum von Zeit, um den Umverteilungsprozess zur weiteren Analyse zu überwachen.
Hinweis: Das Array wurde GPR gehalten Datenerhebung für 4 h, nachdem das Ventil geschlossen worden waren. Dennoch wurden diese Daten nicht für die hier vorgestellte Studie analysiert.
(3) Datenanalyse für die Velocity-Schätzung
- COG und CMP-Daten durch die Extraktion der relativen Tx-Rx-Kombinationen aus der gesamten Data Cube zu rekonstruieren. Erreicht wurde dies durch einige benutzerdefinierten Code, der von den Autoren, die die Radar-Profile so zu gruppieren, Tx-Rx-Paare auf identische Offset (COG) und diejenigen, die mit dem gleichen Mittelpunkt (CMP) neu entwickelt.
Hinweis: Da eine SFCW GPR-Einheit für diese Studie verwendet wurde, sind die Rohdaten im Frequenzbereich; der Betrieb der Frequenz Zeitkonvertierung erfolgte mittels der Software des Herstellers GPR System. - Schätzen Sie die optimale EM Wellengeschwindigkeit im Bereich Benetzung auf einer bestimmten verstrichene Zeit durch den Einbau der berechneten Zweiwege-Reisezeit, tc, die EM-Welle vorn Infiltration der beobachteten Signale reflektiert. Die Geschwindigkeit, mit der besten Kurvenanpassung wurde heuristisch ermittelt.
 (1)
(1)
wo d0 die tiefe Reflexion, X ist der Abstand zwischen Tx und Rx, VR ist die Root-Mean-Square Geschwindigkeit auf der Ebene der Reflexion und t0 ist die zwei-Wege-Fahrzeit bei Null offsets aus der CMP-Radargram ermittelt.
Hinweis: Die am häufigsten verwendete Geschwindigkeit Schätzmethode mit MOG ist Schein Analyse5,15,17. Im Schein-Analyse ist die Root-Mean-Square-Geschwindigkeit nahm mit einer Geschwindigkeit Spektrum. Schein-Analyse wurde nicht für die Schätzung der Geschwindigkeit in dieser Studie verwendet, da das geringe Signal-Rausch-Verhältnis im Array GPR Daten beobachtet nicht erlaubte uns eine zuverlässige Geschwindigkeit Spektrum zu entwickeln. Finden einen geeignetsten Filter-Methode, eine zuverlässige Geschwindigkeit Spektrum aus diesen Daten zu generieren wird in anderen laufenden Forschung untersucht. Für den Umfang dieser Studie wurde die Kurvenanpassung Methode zur Eq (1) um die CMP-radargramme passen. - Mit GL. (1), berechnen Sie die Benetzung vorne Tiefe d0 zu einer bestimmten verstrichene Zeit mit geschätzten EM Geschwindigkeit VR.
Hinweis: Für diesen Teil der Datenanalyse diente die COG-Datensatz bei einem Offset X 113 mm entspricht.
Ergebnisse
Abbildung 3 zeigt ein Time-Lapse Panel Diagramm 110 Tx-Rx-Kombinationen erworben jeden 1,5 s während der ersten 60 min. Infiltration Experiments, nach der Konvertierung der Daten von Frequenz, Zeitbereich. Um Reflexionen an Tiefe zu verbessern, wurde ein Bandpassfilter gefolgt von Gewinn Entschädigung angewendet. Das Panel Diagramm ist jeder Abschnitt entspricht einer bestimmten Tx in 10 Abschnitte teilbar. Die Lage des Tx wird durch ein weißes Dreieck angezeigt, und jede Scheibe entspricht ein Zeitraffer-Signal für eine Rx aufgenommen. Die vertikale Achse zeigt die zwei-Wege-Fahrzeit oder TWT, d. h. die Zeit notwendig für die EM-Welle vom Sender, die eventuelle Reflektor und zurück an den Empfänger zu reisen. Die Profile zeigen die Signalamplitude in einem Graustufen-Farbkarte. Ein großer Unterschied in der Farbe zeigt hohen Amplitude in der aufgezeichneten Radar-Signal. EM Welle Reflexionen entstehen an der Schnittstelle zwischen Schichten in verschiedenen Dielektrizitätskonstante oder von Objekten mit unterschiedlichen elektrischen Eigenschaften als das umgebende Medium; ein hoher dielektrischer Kontrast wird eine hohe Amplitude Reflexion bestimmen. Bei der Wasser eindringen ist eine Zone, die als die Übergangszone, wo der Wassergehalt von der Kante der Benetzung Zone,, die ist allmählich, wo Wasser dringt in den zunächst trockenen Boden, bezeichnet. Die EM-Welle wird voraussichtlich nicht am Rande, aber innerhalb der Wechselzone reflektiert werden, wie in Studien des Grundwasserspiegels Erkennung18beobachtet. In den Rest des Manuskripts ist diesem Bereich Reflexion der Benetzung Vorderseite genannt. In Abbildung 3ein hoher Amplitude Signal erscheint und bewegt sich stetig nach unten Fortschreiten Zeit während des Experiments. Diese Reflexion ist in der Tat durch die Benetzung Front produziert, wie das Wasser im Untergrund allmählich nach unten dringt. Aus diesem Diagramm kann CMP und Zahnrad rekonstruiert werden wie in Abbildung 2 der Iwasaki Et al. 16
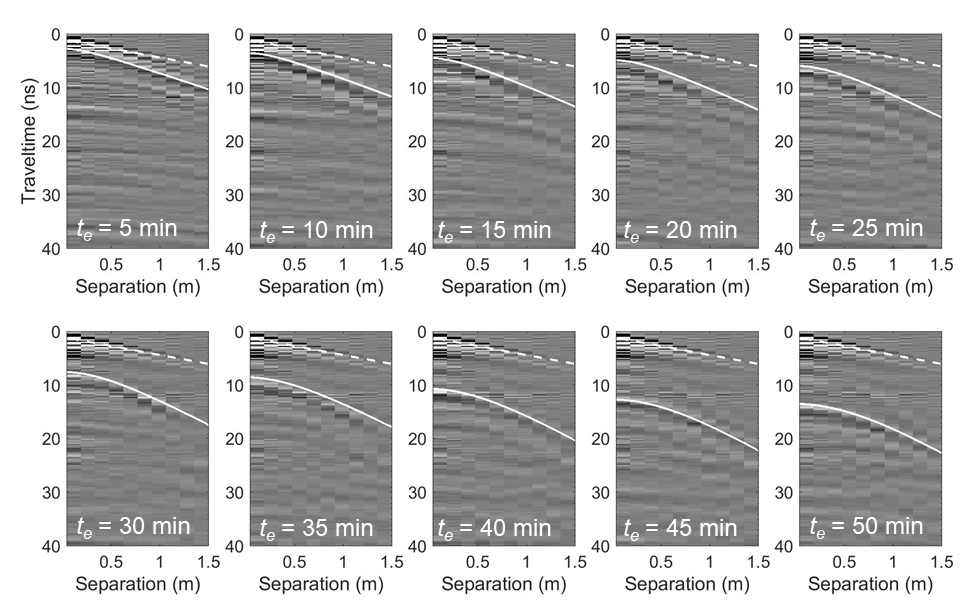
Geschwindigkeit-Analyse wurde auf der CMP Daten alle 1 Minuten durchgeführt. Für jeden Satz von CMP-Daten wurde die zwei-Wege-Fahrzeit von GL. (1) gegeben zur Reflexion von Benetzung vorne ausgestattet, t0 und VR, unter der Annahme einer gleichmäßigen Schicht in der feuchten Zone anpassen. Zeit NULL wurde behoben, durch den Einbau der Luft-Welle mit einer Geschwindigkeit von 0,3 m/ns. Abbildung 4 zeigt CMP Daten in 5 min Abständen von verstrichene Zeit te = 5 min bis te = 50 min zusammen mit der Best-fit Kurven als weiße Linien (durchgezogene Linien für die reflektierte Welle) und gestrichelte Linie für die Luft-Welle angezeigt. Da die Luft-Welle nicht reflektierte Welle aber das direkte Signal zwischen Sender und Empfänger, steigt die Fahrzeit linear mit dem Abstand. Die Kurven wurden die positiven Gipfel (in weißer Farbe) der reflektierten Wellen ausgestattet. Alle Kurven gut zu den beobachteten reflektierten Kurven gezeigt in der CMP radargramme alle Offsets, was bedeutet, dass die geschätzten Werte für t0 und VR sind gut ausgestattet. Für die Infiltration-Experiment wurde eine trockene Holzplatte zwischen der Antenne und die porösen Schläuche gelegt. Da das Panel eine Niedrigerere Dielektrizitätskonstante als bei nassem Boden hat, seine Auswirkungen auf die EM-Wellenausbreitung vernachlässigbar, möglicherweise nicht, obwohl sie dünn ist. Ein zwei-Schichten-Modell galt dann neben dem oben genannten gleichmässige Schicht-Modell, vorausgesetzt, einen Wert von 3 für die Dielektrizitätskonstante des Top 5 cm. Auch wurde für dieses zweite Modell Kurvenanpassung auf die Spiegelung durch die Benetzung Front produziert die EM Welle Geschwindigkeit VR geschätzt.
In Abbildung 5, geschätzt, Benetzung vorderen tiefen als Funktion von te für die ein- und zwei-Schicht-Modelle dargestellt werden. Es kann geschätzt werden, dass die Benetzung vorne nach unten bewegt sich nahezu linear mit der Zeit für beide Modelle, mit Ausnahme einer Verlangsamung zwischen te = 10 min und te = 20 min. Unterschiede zwischen beiden Modellen sind zunächst nicht signifikant, aber wie die Zeit verstreicht bewegt sich die Schätzung für das einheitliche Modell etwas schneller im Vergleich zu der zwei-Schichten-Modell. In Abbildung 5sind Diamanten Symbole verwendet, um die Zeiten zu markieren, wenn Lesungen aus dem Feuchte-Sensoren begannen zu steigen und wenn sie später zu stetigen; Diese sind durch eine durchgezogene Linie für jeden Sensor Tiefe verbunden. Wie bereits erwähnt, tritt die Reflexion der EM Welle nicht unbedingt am äußersten Rand von der feuchten Zone; Das heißt, kann unter Berücksichtigung einer bestimmten Tiefe, man nicht erwarten diese Überlegungen auf den Punkt in der Zeit passende wann die Lesungen von einem Sensor beginnen zu erhöhen. In diesem Sinne ist die Reflexion zurückzuführen auf eine Tiefe Infiltration vorne wo eine bestimmte Wassersättigung erreicht wurde, im Vergleich zu den Bereich direkt unterhalb. In Anbetracht der Sensoren bei 30, 40 und 60 cm Tiefe fällt die Schätzung der Benetzung vorne Tiefe gewonnenen GPR-Daten auch im Bereich von der durchgezogenen Linien auf der Zeitachse angezeigt. Die Zeit, wann die GPR geschätzt, Benetzung vorne angekommen in 20 cm Tiefe, entspricht der Zeit, als der plötzliche Anstieg der Sensorwerte beobachtet wurde, während die GPR-Schätzung erreicht die Tiefe von 10 cm wesentlich schneller, was von der Feuchtesensor produziert wurde, , obwohl das Reflexionssignal von Benetzung vorne nach te deutlich zu sehen ist = 5 min (Abbildung 4). Es muss auch erwähnt werden, dass die Extrapolation der GPR geschätzt, dass die Kurve nicht durch den Ursprung verläuft. Es ist, zwar nicht klar, was diese Diskrepanz bei geringeren Tiefen verursacht möglicherweise gibt es einige mögliche Erklärungen. Es kann Heterogenität in Eigenschaften des Bodens zugeschrieben werden kann, oder es aufgrund der Inhomogenität im Wasseranwendung. Wenn dies tatsächlich der Fall ist, hätte dies zu einem späteren Zeitpunkt eine größere Wirkung als früher bei der Infiltration. Eine andere Erklärung könnte sein, dass die Rauheit der Oberfläche wirkt sich auf die Bestimmung der Zeit NULL. Neben der Wirkung der Holzplatte und poröse Schläuche sollte die Wirkung der Rauheit der Oberfläche berücksichtigt werden.

Abbildung 1 : Schema des Arrays ground penetrating Radar Antennenkonfiguration in dieser Studie verwendeten. V-förmige Strukturen sind Bowtie Monopole Antennen. Es gibt 10 Sendeantennen (Tx) und 11 Empfangsantennen (Rx) horizontal ausgerichtet. Bitte klicken Sie hier für eine größere Version dieser Figur.
{kind=link}

Abbildung 2: Schemas des Experiments Infiltration. (A) eine Ansicht von oben und (B) eine Seitenansicht in der Array-Antenne auf sechs 250 cm porösen Schläuche gelegt wurde ausgerichtet 15 cm auseinander. Bitte klicken Sie hier für eine größere Version dieser Figur.
{kind=link}

Abbildung 3 : Zeitraffer Radargram erhalten, während die ersten 60 min des Experiments Infiltration. Daten bestehen aus aufgezeichneten Signale für 110 antennenkombinationen. Eine Scheibe entspricht Zeitraffer mit einer einzigen Tx-Rx-Kombination gesammelten Daten. Eine andere Farbe dient zur Signalamplitude. Vertikale schwarze Linien getrennte Daten für jede Tx. White Dreiecke zeigen die Standorte der Tx. Bitte klicken Sie hier für eine größere Version dieser Figur.
{kind=link}

Abbildung 4 : Radargramme des CMP bei te = 5 min bis te = 55 min 5 min Abständen. Die weiße vertretenen durchgezogenen Linien manuell ausgestattet zwei-Wege-Fahrzeit der Reflexion von Benetzung vorne, während die weißen gestrichelte Linien die Fahrzeit der Luft Welle repräsentieren. Bitte klicken Sie hier für eine größere Version dieser Figur.
{kind=link}

Abbildung 5 : Vordere tiefen Benetzung. Benetzung der vorderen tiefen aus Array GPR im Zeitraffer Multi-Offset zu sammeln, in Abhängigkeit von der verstrichenen Zeit sowohl für die Uniform (Dreiecke) und die zwei-Schicht (Quadrat) Modelle geschätzt. Schwarze Linien mit Diamanten an beiden Enden zeigen die Zeit zwischen der anfänglichen Anstieg Lesungen und wenn diese einen konstanten Niveau für jeden Sensor Tiefe (d. h. die Dauer der Übergangszone) erreicht. Bitte klicken Sie hier für eine größere Version dieser Figur.
{kind=link}
Diskussion
In dieser Studie Array Ground penetrating Radar (GPR) verwendet wurde, um die Tiefe der Benetzung Front während eines Experiments Infiltration zu verfolgen in einem Experimentierfeld in der Nähe von Tottori Sanddüne, Japan durchgeführt. Das Array in dieser Studie verwendeten GPR-System besteht aus 10 Sendeantennen (Tx) und 11 Empfangsantennen (Rx). Das System kann so konfiguriert werden, bis zu 110 verschiedene Tx-Rx-Kombinationen verwenden. Während des Experiments Infiltration wurden alle 110 Kombinationen kontinuierlich gescannt, in 1,5 Sekunden Abständen, verlassen das Array stationär an der Stelle, wo Wasser durch einige porösen Schläuche auf die entsprechende Fläche angewendet wurde. Gemeinsamen-Offset Gather (COG) und gemeinsame Mitte Punktdaten (CMP) wurden aus der Time-Lapse Data Cube rekonstruiert. Es wäre praktisch unmöglich, CMP-Daten mit der gleichen Rate mit konventionellen bistatischen GPR Systeme zu sammeln. Es ist sehr wichtig, die Antenne in der stationären Aufnahme während des Experiments zu verlassen, um reproduzierbare und aussagekräftige Zeitraffer-Daten zu erhalten.
Obwohl GPR Arraydaten verwendet wurden, um EM Welle Geschwindigkeiten15schätzen, gibt es nur wenige Studien, die analysiert Zeitraffer Arraydaten GPR um EM Welle Geschwindigkeiten zu schätzen, für transiente Prozesse wie Eindringen Wasser. In dieser Studie wurde die elektromagnetischen (EM) Geschwindigkeit Wellenstruktur aus den Zeitraffer CMP-Daten geschätzt. Anstelle von Schein-Analyse durchführen, wurde die Hyperbel Kurve für die zwei-Wege-Fahrzeit heuristisch auf die reflektierten Signale in der CMP-radargramme um EM Welle die Durchschnittsgeschwindigkeit in der Benetzung Zone wegen geringen Signal-Rausch-schätzen ausgestattet (S / (N) Verhältnis in den Daten. Wenn das S/N-Verhältnis niedrig ist, kann nicht Schein Analyse verwendet werden, um eine zuverlässige Geschwindigkeit Spektrum zu erzeugen. Eine entsprechende Filtermethode müssten entwickelt werden, die Schein-Analyse-Methode bilanziert. Ein Stab-Typ Bodenfeuchtesensor wurde neben der GPR-Antenne zur Messung der Veränderungen in Bodenfeuchte während des Experiments Infiltration installiert; die Sensoren wurden in einer Tiefe von 10, 20, 30, 40 und 60 cm vertrieben und arbeitete selbständig.
Verwenden die geschätzte EM Wellengeschwindigkeit, war die Tiefe der Benetzung Front im 1-Minuten-Takt von der infiltrationsprozess berechnet. Die Entwicklung in der Zeit der geschätzten Benetzung Front stimmt gut mit den Beobachtungen von der Erde-Feuchte-Sensoren in Tiefen von 20 cm. Bei geringeren Tiefen zeigt die GPR-Schätzung der Benetzung vorne Tiefe eine Diskrepanz mit den Lesungen aus dem Boden Feuchte-Sensoren.
Insgesamt zeigt diese Studie, dass das Array GPR System verfolgen die Entwicklung der vorderen Tiefe Benetzung bei Eindringen von Wasser in den Boden, Datensammlung Zeitraffer gemeinsamen Mittelpunkt (CMP) kann. Da diese Art von Daten nicht leicht von konventionellen Oberfläche GPR vor gesammelt wurden, sind in dieser Studie gewonnenen Daten die allerersten, die tatsächlich zu zeigen, wie die Benetzung Front entwickelte sich im Laufe der Zeit im Untergrund. Zukünftige Arbeit untersuchen die Möglichkeit der Verwendung von Daten-Inversion, um die hydraulischen Parameter des Bodens aus den während dieses Experiment gewonnenen Daten zu schätzen.
Danksagungen
Diese Studie wurde finanziell unterstützt von JSPS Beihilfe Scientific Research Program (Nr. 16 H 02580, 17 H 03885) und durch gemeinsame Forschung Programm von trockenen Land Research Center, Tottori Universität.
Materialien
| Name | Company | Catalog Number | Comments |
| GeoScope Radar Unit | 3D Radar AS | ||
| DXG1820 antenna | 3D Radar AS | ||
| PR2/6 Profile Probe | Delta-T |
Referenzen
- Huisman, J., Hubbard, S., Redman, J. D., Annan, P. Measuring soil water content with ground penetrating radar: A review. Vadose Zone Journal. 2 (4), 476-491 (2003).
- Lambot, S., Weihermüller, L., Huisman, J., Vereecken, H., Vanclooster, M., Slob, E. C. Analysis of air-launched ground-penetrating radar techniques to measure the soil surface water content. Water Resources Research. 42, 1-12 (2006).
- Binley, A., Hubbard, S., Huisman, J., Revil, A., Robinson, D., Singha, K., Slater, L. The emergence of hydrogeophysics for improved understanding of subsurface processes over multiple scales. Water Resources Research. 51, 3837-3866 (2015).
- Vereecken, H., Huisman, J., Hendricks, F. H., Bruggemann, N., Bogena, H., Kollet, S., Javaux, M., Van Der Kruk, J., Vanderborght, J. Soil hydrology: Recent methodological advances, challenges, and perspectives. Water Resources Research. 51, 2616-2633 (2015).
- Forte, E., Pipan, M. Review of multi-offset GPR applications: Data acquisition, processing and analysis. Signal Processing. 132, 1-11 (2017).
- Vellidis, G., Smith, M. S., Thomas, D. L., Asmussen, L. E. Detecting wetting front movement in a sandy soil with ground-penetrating radar. Transactions of the ASAE. 33 (6), 1867-1874 (1990).
- Trinks, I., Wachsmuth, D., Stumpel, H. Monitoring water flow in the unsaturated zone using georadar. First Break. 19, 679-684 (2001).
- Saintenoy, A., Schneider, S., Tucholka, P. Evaluating Ground Penetrating Radar Use for Water Infiltration Monitoring. Vadose Zone Journal. 7 (1), 208-214 (2008).
- Léger, E., Saintenoy, A., Coquet, Y. Hydrodynamic parameters of a sandy soil determined by ground-penetrating radar inside a single ring infiltrometer. Water Resources Research. 50 (7), 5459-5474 (2014).
- Eide, E., Valand, P. A., Sala, J. Ground-coupled antenna array for step-frequency GPR. Proceedings of 15th International Conference on Ground Penetrating Radar. , 785-790 (2014).
- Eide, E., Hjelmstad, J. F. 3D utility mapping using electronically scanned antenna array, Proceedings of GPR 2002. Proceedings of Ninth International Conference on Ground Penetrating Radar. , 192-196 (2002).
- Linford, N., Linford, P., Martin, L., Payne, A. Stepped frequency ground penetrating radar survey with a multi-element array antenna: Results from field application on archaeological sites. Archaeological Prospection. 17, 187-198 (2010).
- Eide, E., Hjelmstad, J. F. UXO and landmine detection using 3-dimensional ground penetrating radar system in a network centric environment. Proceedings of ISTMP 2004. , (2004).
- Sato, M., Hamada, Y., Feng, X., Kong, F. N., Zeng, Z., Fang, G. GPR using an array antenna for landmine detection. Near Surface Geophysics. 2 (1), 7-13 (2004).
- Yi, L., Takahashi, K., Sato, M. Estimation of vertical velocity profile by multistatic GPR Yakumo. Proceedings of 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS). , 1060-1063 (2015).
- Iwasaki, T., Kuroda, S., Saito, H., Tobe, Y., Suzuki, K., Fujimaki, H., Inoue, M. Monitoring infiltration process seamlessly using array ground penetrating radar. Agricultural and Environmental Letters. 1, 160002 (2016).
- Booth, A. D., Clark, R., Murray, T. Semblance response to a ground-penetrating radar wavelet and resulting errors in velocity analysis. Near Surface Geophysics. 8 (3), 235-246 (2010).
- Saintenoy, A., Hopmans, J. W. Ground Penetrating Radar: Water Table Detection Sensitivity to Soil Water Retention Properties. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing. 4 (4), 748-753 (2011).
Nachdrucke und Genehmigungen
Genehmigung beantragen, um den Text oder die Abbildungen dieses JoVE-Artikels zu verwenden
Genehmigung beantragenThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Alle Rechte vorbehalten