
Method Article
Отслеживание инфильтрат, который собирает Передние глубины с помощью покадровой мульти смещение собраны с помощью массива антенна георадара
В этой статье
Резюме
Здесь мы представляем местах проникновения радар (ППГ) системы, основанной на сочетании земли, густонаселенных антенная для мониторинга динамичный процесс инфильтрации подземных вод. Покадровой радиолокационное изображение процесс проникновения позволили оценки глубины пропитки фронта в ходе процесса инфильтрации.
Аннотация
Местах проникновения радар (ППГ) системы, основанной на сочетании наземных, густонаселенных антенная был использован для сбора данных во время проникновения эксперимента, проведенного на полигоне возле песчаных дюн Тоттори, Япония. Антенна массив, используемый в данном исследовании состоит из 10 передающей антенны (Tx) и 11 приема антенны (Rx). Для этого эксперимента система была настроена для использования все возможные комбинации Tx Rx, приводит в нескольких смещение собрать (MOG) состоящий из 110 Tx Rx комбинаций. Массив остался стационарные позиции непосредственно над областью инфильтрации и данные были собраны каждые 1,5 секунды, используя time-на основе триггера. Общее смещение собрать (COG) и общей медианной (CMP) кубов данных были реконструированы из данных мог во время пост-обработки. Там было несколько исследований, которые использованы покадровой CMP данных для оценки изменений в скорости распространения. В этом исследовании скорость волны электромагнитной (ЭМ) эвристически оценивалась в 1-минутным интервалом от восстановленных данных CMP через кривую установку, используя уравнение гиперболы. Мы затем приступил к вычислить глубину пропитки фронта. Эволюция смачивания фронта со временем получить через этот метод согласуется с замечаниями от датчика влажности почвы, который был помещен на глубине ниже 20 см. Результаты, полученные в настоящем исследовании продемонстрировать способность такого массива GPR системы для мониторинга подземных динамичный процесс, как точно и количественно воды инфильтрация.
Введение
Понимание массы и энергии транспортных процессов в вадозной зоны имеют важное значение для многих приложений в сельскохозяйственных и экологических дисциплин. Среди этих процессов переменно насыщенного водного потока является важным процессом, как многие из других процессов, таких как физические, геохимических, биологические и даже механических процессов, обычно связаны с потоком воды. Недавние события в геофизические методы позволили одним неинвазивным мониторинга гидрологических процессов в вадозной зоны. Среди многих геофизических методов почвопроникающий радиолокатор (ППГ) является одним из наиболее широко используемых методов для мониторинга и характеризовать динамику воды почвы, потому что распространения электромагнитных волн (EM) излучаемого и полученных с помощью Георадара антенны характеризуются почвы влага содержание1,2,3,4. Среди имеющихся систем поверхности ППГ (именуемый поверхности GPR в оставшуюся часть манускрипта) является наиболее распространенным для использования в поле. Традиционные поверхности GPR системы с одного и одного передатчика (бистатической РЛС) обычно используются для проверки подземных с постоянной приемо-передающих разделения (смещение). Наборы данных, собранных в этой конфигурации, также известный как общее смещение собирает (COG). Радиолокационные данные отображаются в виде временных рядов на основе общее время пути между передатчика, возможного отражатели и обратно в приемник. Чтобы преобразовать время в пути информации, глубина, скорость волны ЭМ в недрах необходимо оценить. Например это можно сделать путем анализа наборов данных несколькими смещения собираются (MOG)5.
Несмотря на ряд исследований с помощью Георадара для мониторинга подземных инфильтрации процессы6,,78,9, ни один из них непосредственно определяется расположение передних смачивания или Эм волны скорость структура, которая меняется со временем во время проникновения. Общий подход заключается в использовании объектов похоронен на глубинах, известных как ссылка отражатели для определения средней скорости волны ЭМ и смачивание Передние глубины. После смачивания фронта динамически изменяется во время проникновения, покадровой MOG должны быть собраны в короткие интервалы времени использовать изменения в структуре скорость волны ЭМ без использования ссылок объектов. С общей бистатической поверхности ППГ антенны коллекция покадровой MOG короткие промежутки между друг друга трудно или невозможно, как он требует, чтобы вручную переместить антенны для настройки смещения различных конфигураций. Недавно семейство антенная ППГ (упоминаемый как массив ППГ далее) широко используется в недрах быстро и точно10изображений. Основная концепция массива ППГ является предоставлять плотные ряды с минимальными усилиями по электронным переключением несколько антенн, смонтированы в одном кадре. Массив GPR системы использовались главным образом для быстрого создания 3D подземных изображений обширные районы. Некоторые примеры типичных приложений для этих систем являются дороги и моста инспекции11, археологические разведки12 и13,обнаружения неразорвавшихся боеприпасов и наземных мин14. Для таких целей массив ППГ главным образом используется для сканирования недр с конфигурацией разделения постоянной антенна для сбора COG. Хотя доказано, что MOG собранных с массивом, ППГ могут быть использованы для оценки скорости15, практическое применение этой методологии была ограничена только несколько случаев. Размещая антенной решетки на одном месте, может быть легко собрана время прошедших MOG. Как показано в нашей недавней публикации16, покадровой изображаются, собранные с массивом GPR системы довольно четко изобразить отражения сигналов от смачивания фронта, как она постепенно движется вниз во время эксперимента вертикальной инфильтрации осуществляется на песчаной дюне. Основная цель этого документа было продемонстрировать, как использовать массив Георадара для сбора покадровой MOG во время проникновения испытания и как анализировать такие данные для отслеживания глубину пропитки фронта.
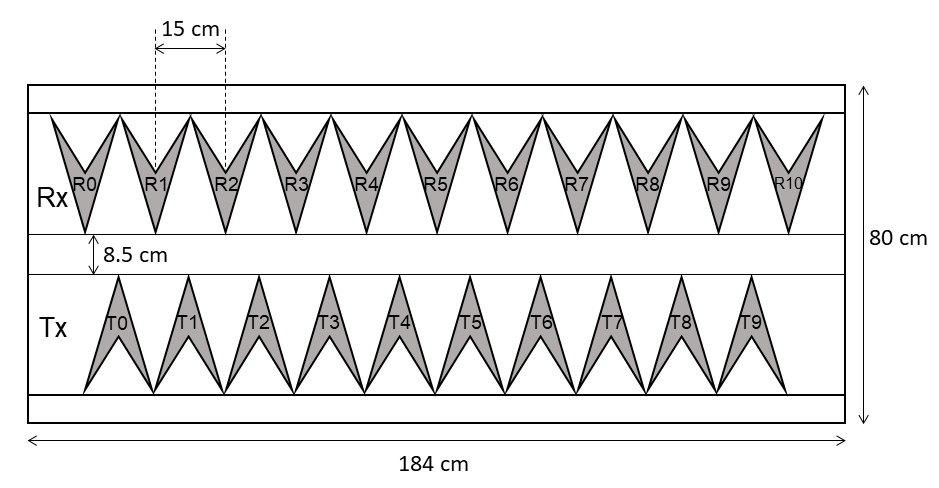
В этом исследовании, мы использовали антенна массив, состоящий из 10 передачи (Tx0 - Tx9) и 11 получение (Rx0 - Rx10) галстук бабочку монополь антенны. Перемещение элементов антенны в массиве показано на рисунке 1 (см. Таблицу материалы). Антенной решетки контролируется РЛС шаг-частота непрерывного сигнала (SFCW), работающих в диапазоне частот от 100 МГц до 3000 МГц. Массив ППГ переключается через определяемые пользователем последовательности пар Rx-Tx, с использованием радиочастотного (RF) мультиплексоры в массив антенны10. Максимальное количество комбинаций Tx Rx для этой конкретной системы-110. Для этого эксперимента мы настроили массива ППГ использовать все 110 комбинации, программирование последовательности сканирования, так что каждый передатчик, от Tx0 до Tx9, был в паре последовательно с все 11 магнитолы от Rx0 до Rx10. Время, необходимое для выполнения сканирования через все 110 комбинаций составляет менее 1,5 секунд. Смещение между передатчиком и приемником была рассчитана на основе расстояния между корма точками элементов антенны, где вертикальное смещение-85 мм, как показано на рисунке 1.
протокол
Основной целью данного исследования было использовать массив GPR системы для визуализации подповерхностных динамических процессов, например инфильтрации воды, важно также описать, как было проведено испытание инфильтрации.
1. опробование инфильтрации
- Выберите сайт, с голой поверхности для проникновения теста.
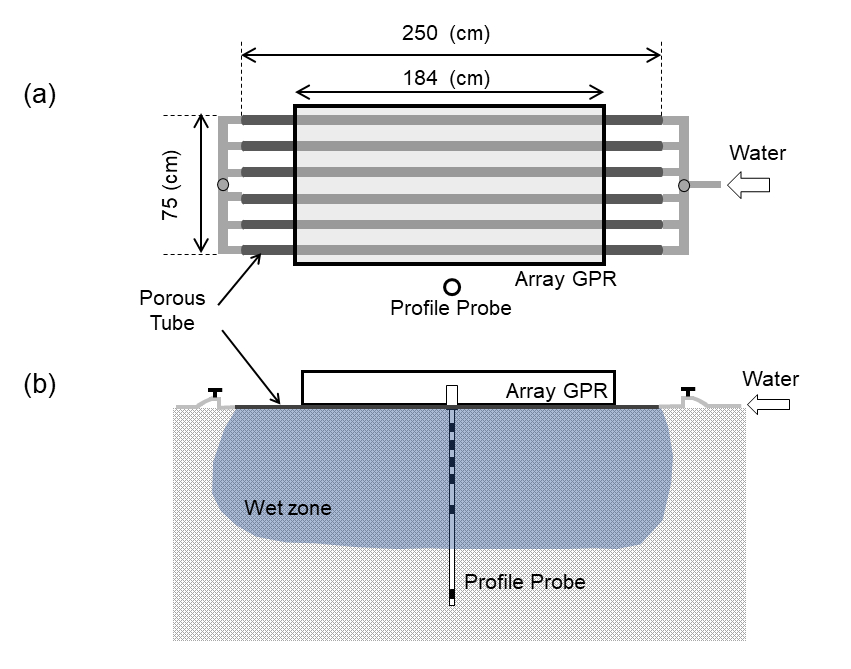
Примечание: Для этого исследования было проведено испытание инфильтрации в учреждении большого парниковых университета Центр исследований засушливых земель Тоттори, Япония. Смотрите последние публикации для больше детали16. - Положение на поверхности шести 2,5 м длиной пористых трубок параллельно на расстоянии 15 см между друг с другом, с тем чтобы обеспечить единообразного проникновения (рис. 2).
- Подключите один конец трубки для регулируемых впускной клапан, который подключен к водоема или кран, а другой конец к розетке, чтобы удалить лишнюю воду.
- Поместите тонкий 910 x 1802 мм2 элементной (немного больше, чем массив антенны), чтобы покрыть пористых трубок.
- Проверьте эффект панели дерева на радиолокационного сигнала до проникновения испытания.
- Установка датчиков влажности почвы рядом с панели дерева для наблюдения за изменениями в влажности почвы на разной глубине.
Примечание: Этих датчиков предназначен для предоставления справочных данных, используемых для перекрестной проверки результатов анализа данных GPR. В этом исследовании датчик влажности почвы стержня типа (см. Таблицу материалов) была установлена рядом с антенной для мониторинга почвы диэлектрическая константа в 10, 20, 30, 40, 60 и 100 см глубины.
2. ППГ измерения
- Разместите антенну ППГ массива на панели дерева.
Примечание: В этом исследовании антенна была оставлена стационарные для обеспечения последовательности в зарегистрированных сигналах. - Подключите антенну к контроллеру с помощью коаксиального кабеля.
- Подключение контроллера к ноутбук ПК с помощью кабеля Ethernet.
- Решите, что антенна комбинаций и их последовательности, чтобы обеспечить как общее смещение собрать (COG) и собрать мульти смещения (MOG) собираются бесшовно.
Примечание: В этом исследовании все возможные комбинации для массива GPR в нашем распоряжении был используется (110). Он взял меньше, чем 1.5 s выполнять полную проверку через все комбинации. - Начните запись данных GPR, с использованием программного обеспечения сбора данных.
Примечание: Важно начать сбор данных, прежде чем вода вводится в пористых трубок. - Откройте клапан для применения воды (т.е., начать процесс инфильтрации).
Примечание: Скорость впрыска воды в недрах может быть определено из гидравлических свойств (например, гидравлическая проводимость) целевого почвы. Скорость потока, используемые в данном исследовании был 7000 см3мин., который был меньше насыщенных Гидропроводность песчаные дюны. - После вводят определенное количество воды, закройте клапан.
Примечание: Вода непрерывно вводили для 4 h, и в общей сложности 1 680 Л воды были использованы для тестирования. - Держите сканирование с массивом GPR на дополнительный период времени, для того чтобы контролировать процесс перераспределения для дальнейшего анализа.
Примечание: Массив, который был ППГ держал сбор данных за 4 ч после того, как был закрыт клапан. Тем не менее эти данные не были проанализированы для исследования, представленные здесь.
3. анализ данных для оценки скорости
- Реконструировать COG и CMP данных путем извлечения относительной Tx Rx комбинации из общих данных куба. Это было достигнуто благодаря некоторым пользовательского кода, разработанного авторами, которые переставить радар профили так, чтобы сгруппировать Tx Rx пары одинаковых смещение (COG) и те же медианы (CMP).
Примечание: Поскольку блок SFCW GPR был использован для этого исследования, необработанные данные находится в частотной области; была выполнена операция частоты для преобразования времени, с использованием программного обеспечения, предоставленного изготовителем GPR системы. - Оценка оптимальную скорость волны ЭМ в зоне смачивания в данное время затраченное на установку вычисляемых двусторонние поездки время, tc, Эм волны отражение на фронте проникновение на наблюдаемые сигналы. Скорость с лучших кривой был определен эвристически.
 (1)
(1)
где d0 представляет глубину отражения точки, x является расстояние между Tx и Rx, vr корень значит квадрат скорости к плоскости отражения и t0 является двусторонний путешествий время нулевого смещения определяется CMP radargram.
Примечание: Наиболее распространенным методом оценки скорости с помощью MOG-подобие анализа5,15,17. В подобие анализа скорость Среднее квадратическое выбирается с помощью спектра скорости. Подобие анализ не использовался для оценки скорости в этом исследовании, потому что низкое соотношение сигнал шум наблюдается в массиве данных GPR не позволяют нам разрабатывать надежные скорости спектра. Найти соответствующий метод фильтрации для создания надежного скорости спектра из этих данных изучается в других текущих исследований. Для сферы охвата данного исследования кривой метод был использован для Eq (1) соответствовать CMP радарограмм. - Используя уравнение (1), вычислите смачивания фронта глубина d0 в данное время прошедшее с помощью оценкам ет скорость vr.
Примечание: Для этой части анализа данных набор данных COG был использован в смещения x 113 мм.
Результаты
На рисунке 3 показан покадровой панели Диаграмма 110 Tx Rx комбинаций приобрела каждые 1,5 s в течение первых 60 мин инфильтрации эксперимента, после преобразования данных от частоты во времени домена. В целях повышения размышления на глубине, полосовой фильтр был применен следуют получить компенсацию. Схема панели можно разделить на 10 разделов, каждая секция соответствует определенной Tx. Расположение Tx обозначается белым треугольником, и каждый фрагмент соответствует промежуток времени сигнал записан для Rx. Вертикальная ось показывает время двусторонние поездки или ЛБВ, т.е. времени, необходимого для Эм волны путешествовать от передатчика, в конечном итоге отражателя и обратно в приемник. Профили отображаются амплитуда сигнала на карте серого цвета. Большой контраст цвета указывает высокой амплитудой в записи радиолокационного сигнала. Эм волны размышления производятся на стыке между слоями в разные диэлектрическая константа или объектами с различными электрическими характеристиками, чем окружающие среды; Высокая контрастность диэлектрической определит высокой амплитуды отражения. Во время процесса инфильтрации воды является зоной называется переходной зоны, где содержание воды постепенно увеличивается от края смачивания зоны, которая является, где вода проникает в первоначально сухой почвы. Эм волны, вероятно, должны быть отражены не на самом краю, но в переходной зоне, как было отмечено в исследованиях по вопросам обнаружения воды в таблице18. В оставшейся части рукописи это отражение области называется фронт смачивания. На рисунке 3высокой амплитуде сигнала появляется и неуклонно движется вниз как время достижения в ходе эксперимента. Это отражение действительно производится путем смачивания фронт, как вода постепенно проникает вниз в недрах. Из этой диаграммы COG и CMP можно реконструировать как показано на рисунке 2 Ивасаки и др. 16
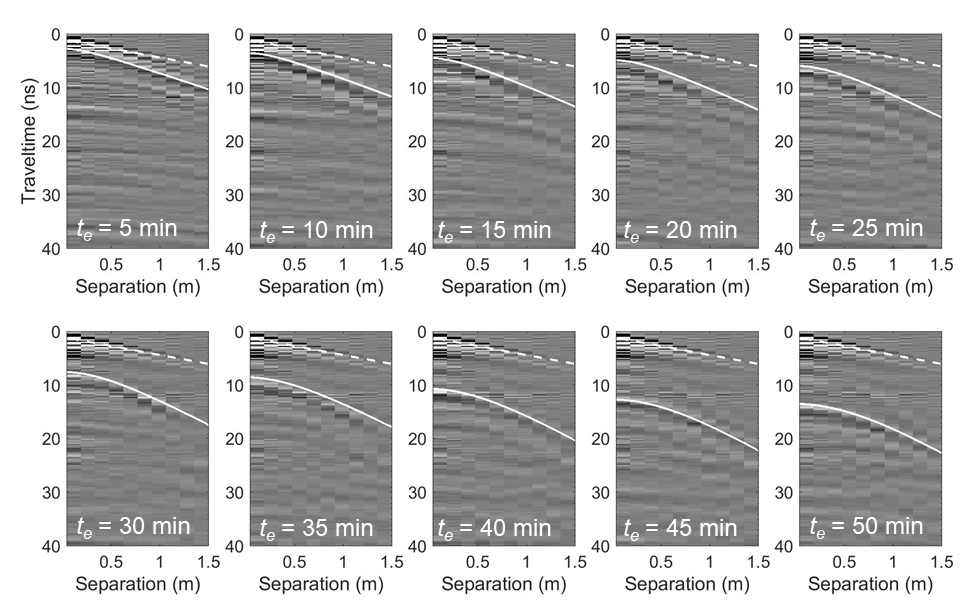
Был проведен анализ скорости на CMP данных, полученных каждые 1 мин. Для каждого набора данных CMP время двусторонний путешествия, уравнение (1) был установлен для отражения от смачивания фронта, регулируя t0 и vr, предполагая равномерным слоем в зоне влажных. Время ноль был исправлен путем установки воздушной волной со скоростью 0,3 м/НС. Рисунок 4 показывает данные CMP интервалом 5 минут от времени te = 5 мин до te = 50 мин наряду с наилучшего кривых, отображается как белые линии (сплошные линии для отраженной волны) и пунктирная линия для воздушной волной. Поскольку волны воздуха не отраженной волны, но прямого сигнала между передатчиком и приемником, время в пути увеличивается линейно с смещением. Все кривые были установлены на положительные пики (в белый цвет) отраженные волны. Все кривые установлен хорошо наблюдаемых отраженного кривых показано в CMP изображаются на все смещения, что означает, что расчетные значения для t0 и vr являются хорошими. Для эксперимента, инфильтрат сухой древесины панели был помещен между антенной и пористых трубок. Потому что группа имеет гораздо меньше диэлектрическая, чем влажной почвы, ее влияние на Эм волн может быть не незначительным, несмотря на то, что это тонкий. Модель 2 слой был рассмотрен в дополнение к вышеупомянутым равномерным слоем модель, предполагая значение 3 для диэлектрическая константа Топ 5 см. Также для этой второй модели, Эм волны скорости vr оценивалась по кривой на отражение, производимые смачивания фронт.
В Рисунок 5, по оценкам, смачивания Передние глубины выводятся как функция te для одно- и двухслойные моделей. Это могут быть оценены, что смачивания фронт движется вниз почти линейно со временем для обеих моделей, за исключением замедление между te = 10 мин и te = 20 мин различия между двумя моделями являются изначально не значительные, но как время истечения смета для единообразной модели движется немного быстрее по сравнению с моделью два слоя. На рисунке 5Алмазный символы используются для обозначения времена когда показания датчиков влажности начала расти и когда они позже стал стабильный; они связаны с сплошной линии для каждого датчика глубину. Как упоминалось выше, отражения волны ЭМ не обязательно возникают на самом краю влажной зоны; Иными словами учитывая определенной глубины, нельзя ожидать это отражение соответствующие точки во времени, когда начинают увеличить показания датчика. В этом смысле отражение объясняется глубину уровня проникновение спереди где достигнут определенный насыщения воды, по сравнению с области сразу ниже. Датчики на 30, 40 и 60 см в глубину, с учетом оценки смачивания Передние глубины, полученные из данных GPR падает хорошо в диапазоне, проявленная сплошные линии на шкале времени. Время, когда, по оценкам GPR, смачивание фронт прибыл на глубине 20 см соответствует времени, когда было отмечено резкое увеличение показания датчика, в то время как смета ППГ достигла глубины 10 см гораздо быстрее, чем то, что был подготовлен датчик влаги , хотя отражение сигнала от смачивания фронта явно наблюдается после te = 5 мин (рис. 4). Кроме того стоит отметить что экстраполяция GPR оценкам, что кривая не проходит через начало координат. Хотя не ясно, что причиной этого несоответствия на меньших глубинах, может быть несколько возможных объяснений. Это может объясняться гетерогенность в свойствах почвы, или это может быть вызвано не единообразия в применении воды. Если это действительно так, то это будет иметь больший эффект ранее в процессе проникновения чем на более поздней стадии. Другое объяснение может быть шероховатость поверхности влияет на определение времени ноль. В дополнение к эффект панели дерева и пористых трубок следует учитывать эффект шероховатости поверхности.

Рисунок 1 : Схема массива молотый проникающего радиолокационной антенны конфигурации используемые в данном исследовании. V-образной структуры являются Боути монополь антенны. Есть 10 передающей антенны (Tx) и 11 приема антенны (Rx) горизонтально. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 2: схем проникновения эксперимента. (A) вид сверху и (B сбоку, в котором массив антенна была помещена поверх шесть 250-cm пористых трубок присоединились 15 см друг от друга. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 3 : Промежуток времени radargram, полученные в ходе первого 60 мин инфильтрации эксперимента. Данные состоят из записанных сигналов для 110 антенна комбинаций. Один фрагмент соответствует промежуток времени данных, собранных с помощью одной комбинации Tx Rx. Другой цвет используется для амплитуды сигнала. Отдельные данные вертикальные черные линии для каждого Tx. белый треугольников указывают местоположения Tx. пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 4 : Радарограмм CMP на te = 5 мин до te = 55 мин интервалом 5мин. Белый, сплошные линии представляют вручную установлены двусторонние поездки время отражения от смачивания фронта, в то время как белый пунктирные линии представляют время путешествия волны воздуха. Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}

Рисунок 5 : Смачивания Передние глубины. Смачивание Передние глубины оценкам из массива, ППГ в покадровой мульти смещение собрать как функция времени как для равномерной (треугольники) и два слоя (квадрат) модели. Черные линии с бриллиантами на обоих концах показывают время между первоначальное увеличение чтений и когда они достигнут устойчивый уровень для каждого датчика глубину (т.е. Продолжительность переходной зоны). Пожалуйста, нажмите здесь, чтобы посмотреть большую версию этой фигуры.
{kind=link}
Обсуждение
В этом исследовании массив землю, которую Грунтопроникающий радар (ППГ) был использован для отслеживания глубина фронта смачивания во время эксперимента инфильтрации провели на опытном поле возле песчаных дюн Тоттори, Япония. Массив GPR системы, используемые в данном исследовании состоит из 10 передающей антенны (Tx) и 11 приема антенны (Rx). Систему можно настроить для использования до 110 различных комбинаций Tx Rx. В ходе эксперимента инфильтрации все 110 комбинации были отсканированы непрерывно интервалом 1,5 секунды, оставляя стационарных массива в месте, где вода была применена через некоторые пористых трубок, расположенных на поверхности. Общие смещение собираются (COG) и общей средней точки данных (CMP) были реконструированы из покадровой данных куба. Было бы практически невозможно собрать CMP данных по той же ставке с обычными бистатической GPR систем. Очень важно оставить антенны в стационарных записи во время эксперимента с целью получения воспроизводимых и значимые промежуток времени данных.
Хотя массив ППГ данных были использованы для оценки Эм волны скорости15, есть только несколько исследований, которые проанализировали данные ППГ покадровой массив для оценки скорости волны ЭМ для переходных процессов, как воды инфильтрата. В этом исследовании электромагнитной (ЭМ) скорости волновая оценивалась от покадровой данных CMP. Вместо выполнения анализа подобие, гиперболы кривой для время двусторонние поездки была оснащена эвристически отраженные сигналы в CMP радарограмм для того чтобы оценить средняя скорость волны ЭМ в зоне смачивания за низкий сигнал шум (S / N) отношение в данных. Когда соотношение сигнал/шум низка, подобие анализ не может использоваться для создания надежного скорости спектра. Соответствующий метод фильтрации должны быть разработаны для использования метода анализа подобие. Датчик влагосодержания почвы тип стержня была установлена рядом с ППГ антенна для измерения изменений в содержание влаги в почве в ходе эксперимента проникновения; датчики были перемещены на глубинах 10, 20, 30, 40 и 60 см и работали независимо друг от друга.
С помощью оценкам скорость волны ЭМ, глубина фронта смачивания рассчитывалось на 1-минутных интервалов процесса инфильтрации. Эволюция во времени примерно смачивания фронта соглашается также с замечаниями от датчиков влажности почвы на глубине ниже 20 см. На меньших глубинах ППГ оценки смачивания Передние глубины показывает несоответствие с показания датчиков влажности почвы.
В целом это исследование показывает, что массив GPR системы способна отслеживания эволюции фронта глубины смачивания во время проникновения воды в почву, собирая покадровой общих данных медианы (CMP). Как этот тип данных не собирались легко от обычных поверхности ППГ раньше, данные, полученные в настоящем исследовании являются первыми, которые на самом деле показывают, как фронт смачивания со временем превратился в недрах. Будущая работа будет изучать возможность использования инверсии данных для оценки гидравлических параметров почвы от данных, полученных в ходе этого эксперимента.
Благодарности
Это исследование было финансовую поддержку программой JSP-страницы субсидий научных исследований (№ 16 H 02580, 17H 03885) и совместных исследований программы засушливых земель научно-исследовательского центра, университета Тоттори.
Материалы
| Name | Company | Catalog Number | Comments |
| GeoScope Radar Unit | 3D Radar AS | ||
| DXG1820 antenna | 3D Radar AS | ||
| PR2/6 Profile Probe | Delta-T |
Ссылки
- Huisman, J., Hubbard, S., Redman, J. D., Annan, P. Measuring soil water content with ground penetrating radar: A review. Vadose Zone Journal. 2 (4), 476-491 (2003).
- Lambot, S., Weihermüller, L., Huisman, J., Vereecken, H., Vanclooster, M., Slob, E. C. Analysis of air-launched ground-penetrating radar techniques to measure the soil surface water content. Water Resources Research. 42, 1-12 (2006).
- Binley, A., Hubbard, S., Huisman, J., Revil, A., Robinson, D., Singha, K., Slater, L. The emergence of hydrogeophysics for improved understanding of subsurface processes over multiple scales. Water Resources Research. 51, 3837-3866 (2015).
- Vereecken, H., Huisman, J., Hendricks, F. H., Bruggemann, N., Bogena, H., Kollet, S., Javaux, M., Van Der Kruk, J., Vanderborght, J. Soil hydrology: Recent methodological advances, challenges, and perspectives. Water Resources Research. 51, 2616-2633 (2015).
- Forte, E., Pipan, M. Review of multi-offset GPR applications: Data acquisition, processing and analysis. Signal Processing. 132, 1-11 (2017).
- Vellidis, G., Smith, M. S., Thomas, D. L., Asmussen, L. E. Detecting wetting front movement in a sandy soil with ground-penetrating radar. Transactions of the ASAE. 33 (6), 1867-1874 (1990).
- Trinks, I., Wachsmuth, D., Stumpel, H. Monitoring water flow in the unsaturated zone using georadar. First Break. 19, 679-684 (2001).
- Saintenoy, A., Schneider, S., Tucholka, P. Evaluating Ground Penetrating Radar Use for Water Infiltration Monitoring. Vadose Zone Journal. 7 (1), 208-214 (2008).
- Léger, E., Saintenoy, A., Coquet, Y. Hydrodynamic parameters of a sandy soil determined by ground-penetrating radar inside a single ring infiltrometer. Water Resources Research. 50 (7), 5459-5474 (2014).
- Eide, E., Valand, P. A., Sala, J. Ground-coupled antenna array for step-frequency GPR. Proceedings of 15th International Conference on Ground Penetrating Radar. , 785-790 (2014).
- Eide, E., Hjelmstad, J. F. 3D utility mapping using electronically scanned antenna array, Proceedings of GPR 2002. Proceedings of Ninth International Conference on Ground Penetrating Radar. , 192-196 (2002).
- Linford, N., Linford, P., Martin, L., Payne, A. Stepped frequency ground penetrating radar survey with a multi-element array antenna: Results from field application on archaeological sites. Archaeological Prospection. 17, 187-198 (2010).
- Eide, E., Hjelmstad, J. F. UXO and landmine detection using 3-dimensional ground penetrating radar system in a network centric environment. Proceedings of ISTMP 2004. , (2004).
- Sato, M., Hamada, Y., Feng, X., Kong, F. N., Zeng, Z., Fang, G. GPR using an array antenna for landmine detection. Near Surface Geophysics. 2 (1), 7-13 (2004).
- Yi, L., Takahashi, K., Sato, M. Estimation of vertical velocity profile by multistatic GPR Yakumo. Proceedings of 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS). , 1060-1063 (2015).
- Iwasaki, T., Kuroda, S., Saito, H., Tobe, Y., Suzuki, K., Fujimaki, H., Inoue, M. Monitoring infiltration process seamlessly using array ground penetrating radar. Agricultural and Environmental Letters. 1, 160002 (2016).
- Booth, A. D., Clark, R., Murray, T. Semblance response to a ground-penetrating radar wavelet and resulting errors in velocity analysis. Near Surface Geophysics. 8 (3), 235-246 (2010).
- Saintenoy, A., Hopmans, J. W. Ground Penetrating Radar: Water Table Detection Sensitivity to Soil Water Retention Properties. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing. 4 (4), 748-753 (2011).
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеСмотреть дополнительные статьи
This article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены