
Se requiere una suscripción a JoVE para ver este contenido. Inicie sesión o comience su prueba gratuita.
Method Article
Características biomecánicas de las extremidades inferiores asociadas con la terminación de la marcha no planificada bajo diferentes velocidades de marcha
En este artículo
Resumen
Este estudio comparó las características biomecánicas de la extremidad inferior durante la terminación de la marcha no planificada bajo diferentes velocidades de marcha. Los datos cinemáticos y cinéticos de las extremidades inferiores de quince sujetos con velocidades de marcha normales y rápidas fueron recogidos utilizando un sistema de análisis de movimiento y una plataforma de presión plantar.
Resumen
La terminación de la marcha causada por estímulos inesperados es una ocurrencia común en la vida cotidiana. Este estudio presenta un protocolo para investigar los cambios biomecánicos de las extremidades inferiores que se producen durante la terminación de la marcha no planificada (UGT) bajo diferentes velocidades de marcha. Se pidió a quince participantes masculinos que realizaran UGT en una pasarela a velocidad normal de marcha (NWS) y velocidad de marcha rápida (FWS), respectivamente. Se aplicó un sistema de análisis de movimiento y una plataforma de presión plantar para recopilar datos de presión cinemática y plantar de las extremidades inferiores. La prueba en T con muestras emparejadas se utilizó para examinar las diferencias en la cinemática de las extremidades inferiores y los datos de presión plantar entre dos velocidades de marcha. Los resultados mostraron un mayor rango de movimiento en las articulaciones de cadera, rodilla y tobillo en el plano sagital, así como la presión plantar en las regiones del antepié y el talón durante UGT en FWS en comparación con nws. Con el aumento en la velocidad de marcha, los sujetos mostraron diferentes características biomecánicas de las extremidades inferiores que muestran FWS asociado con mayores riesgos potenciales de lesiones.
Introducción
La locomoción humana se considera un proceso extremadamente complejo que debe describirse mediante métodos multidisciplinarios1,2. El aspecto más representativo es el análisis de la marcha mediante enfoques biomecánicos. La marcha humana tiene como objetivo mantener la progresión desde la iniciación hasta la terminación, y el equilibrio dinámico debe mantenerse en el movimiento de posición. Aunque la terminación de la marcha (GT) ha sido ampliamente estudiada como una subtarea de marcha, ha recibido menos atención. Sparrow y Tirosh3 definieron GT en su revisión como período de control del motor cuando ambos pies dejan de moverse hacia adelante o hacia atrás en función de las características de desplazamiento y tiempo. En comparación con la marcha de estado estacionaria, el proceso de ejecución de GT exige un mayor control de la estabilidad postural y la compleja integración y cooperación del sistema neuromuscular4. Durante GT, el cuerpo necesita aumentar rápidamente el impulso de frenado y disminuir el impulso de propulsión para formar un nuevo equilibrio corporal5,6. La terminación de la marcha no planificada (UGT) es una respuesta de estrés a un estímulo desconocido6. Cuando se enfrenta a un estímulo inesperado que requiere que uno se detenga repentinamente, el equilibrio dinámico inicial se interrumpirá. Debido a la necesidad del control continuo del centro de masas (COM) y el control de retroalimentación del cuerpo, UGT plantea un mayor desafío al control postural y a la estableidad3,7.
Se ha informado de que UGT es un factor importante que provoca caídas y lesiones, especialmente en personas mayores y pacientes con trastornos del equilibrio3,8. Velocidades de marcha más rápidas pueden conducir a una disminución adicional en el control del motor durante UGT9. Ridge et al.10 investigó el ángulo máximo de la articulación y los datos internos del momento conjunto de los niños durante UGT a velocidad de marcha normal (NWS) y velocidad de marcha rápida (FWS). Los resultados mostraron ángulos de flexión de rodilla más grandes y momentos de extensión a velocidades más rápidas en comparación con la velocidad preferida. Indicaron que el fortalecimiento de los músculos relacionados que rodean las articulaciones de las extremidades inferiores podría ser una intervención útil para la prevención de lesiones durante UGT.
Aunque el efecto de la velocidad de marcha en el carácter biomecánico de las extremidades inferiores durante la marcha de estado estacionaria se ha estudiado ampliamente11,12,13,el mecanismo biomecánico de UGT bajo diferentes velocidades de marcha es limitado. Hasta donde sabemos, sólo tres estudios han evaluado específicamente el rendimiento de las personas sanas de UGT con respecto a los efectos de velocidad9,10,14. Sin embargo, los sujetos en estos estudios fueron principalmente los mayoresde 14 años y los niñosde 10,el mecanismo biomecánico de los adultos jóvenes durante UGT todavía no está claro. La cinemática de las extremidades inferiores y la presión plantar pueden proporcionar un análisis preciso de la biomecánica de la locomoción, y estos también se consideran componentes cruciales para los diagnósticos clínicos de marcha15,16. Por ejemplo, Serrao et al.17 utilizaron datos cinemáticos de miembros inferiores para detectar las diferencias clínicas entre pacientes con ataxia cerebelosa y contrapartes sanas durante la parada repentina. Además, en comparación con la terminación prevista de la marcha (PGT), se pudo observar una mayor presión máxima y fuerza en el metatarsiano lateral durante UGT7,que puede estar asociada a mayores riesgos de lesiones.
Por lo tanto, la exploración de los mecanismos biomecánicos de UGT podría proporcionar información para la prevención de lesiones y nuevas investigaciones clínicas. Este estudio presenta un protocolo para investigar cualquier alteración biomecánica en adultos jóvenes durante UGT bajo diferentes velocidades de marcha. Se presume que, con un aumento de la velocidad de marcha, los participantes expondrían diferentes características biomecánicas de las extremidades inferiores durante UGT.
Access restricted. Please log in or start a trial to view this content.
Protocolo
El Comité de Ética Humana de la Universidad de Ningbo aprobó este experimento. Todo el consentimiento informado por escrito se obtuvo de todas las materias después de que se les informara sobre el objetivo, los requisitos y los procedimientos experimentales del experimento de UGT.
1. Preparación de laboratorio para la marcha
- Cinemática: Sistema de captura de movimiento
- Al calibrar el sistema, apague las luces incandescentes y retire los posibles objetos reflectantes que se puedan confundir con marcadores retrorreflectantes pasivos. Asegúrese de que ocho cámaras infrarrojas estén correctamente dirigidas y tengan una visión clara y razonable.
- Conecte el dongle USB adecuado al puerto paralelo del PC. Encienda las cámaras infrarrojas de captura de movimiento y el convertidor analógico a digital.
- Abra el software de seguimiento en el PC y deje tiempo para que las ocho cámaras infrarrojas se inicialicen. Seleccione el nodo "Sistema local" del panel "Recursos". Cada nodo de cámara mostrará una luz verde si la conexión de hardware es verdadera.
- Ajuste los parámetros del sistema en el panel vista Cámara: establezca la Intensidad estroboscópica en 0,95 - 1, Umbral a 0,2 - 0,4, Ganancia a veces 1 (x1), Modo escala de grises a Automático, Relación de circularidad mínima a 0,5 y Altura máxima de blob en 50.
- Coloque el marco T que consta de 5 marcadores en el centro del área de captura de movimiento. Seleccione todas las cámaras utilizando el modo 2D y confirme que pueden ver la varita de calibración (marco T) sin interferencias ni artefactos. Haga clic en el elemento"Preparación del sistema"en la barra de herramientas y seleccione el objeto de calibración Wand & T-Frame de 5 marcadores en la lista desplegable Marco T.
- En el panel "Herramienta", seleccione el botón "Preparación del sistema" y haga clic en el botón"Iniciar"en la sección"Calibrar cámaras". A continuación, ondee físicamente el marco T en el rango de captura. Detenga la acción cuando las luces azules de las cámaras infrarrojas dejen de parpadear. Monitoree la barra de progreso hasta que el proceso de calibración se complete al "100%"y vuelva al "0%".
NOTA: Asegúrese de que los valores del error de imagen sean inferiores a 0,3. - Coloque el marco T en el suelo (el centro del área de captura de movimiento) y asegúrese de que los ejes del marco T sean consistentes con la dirección del encabezado.
- Seleccione el botón "Iniciar" en la sección "Establecer origen de volumen" en el panel Herramienta.
- Presión plantar: Plataforma de presión
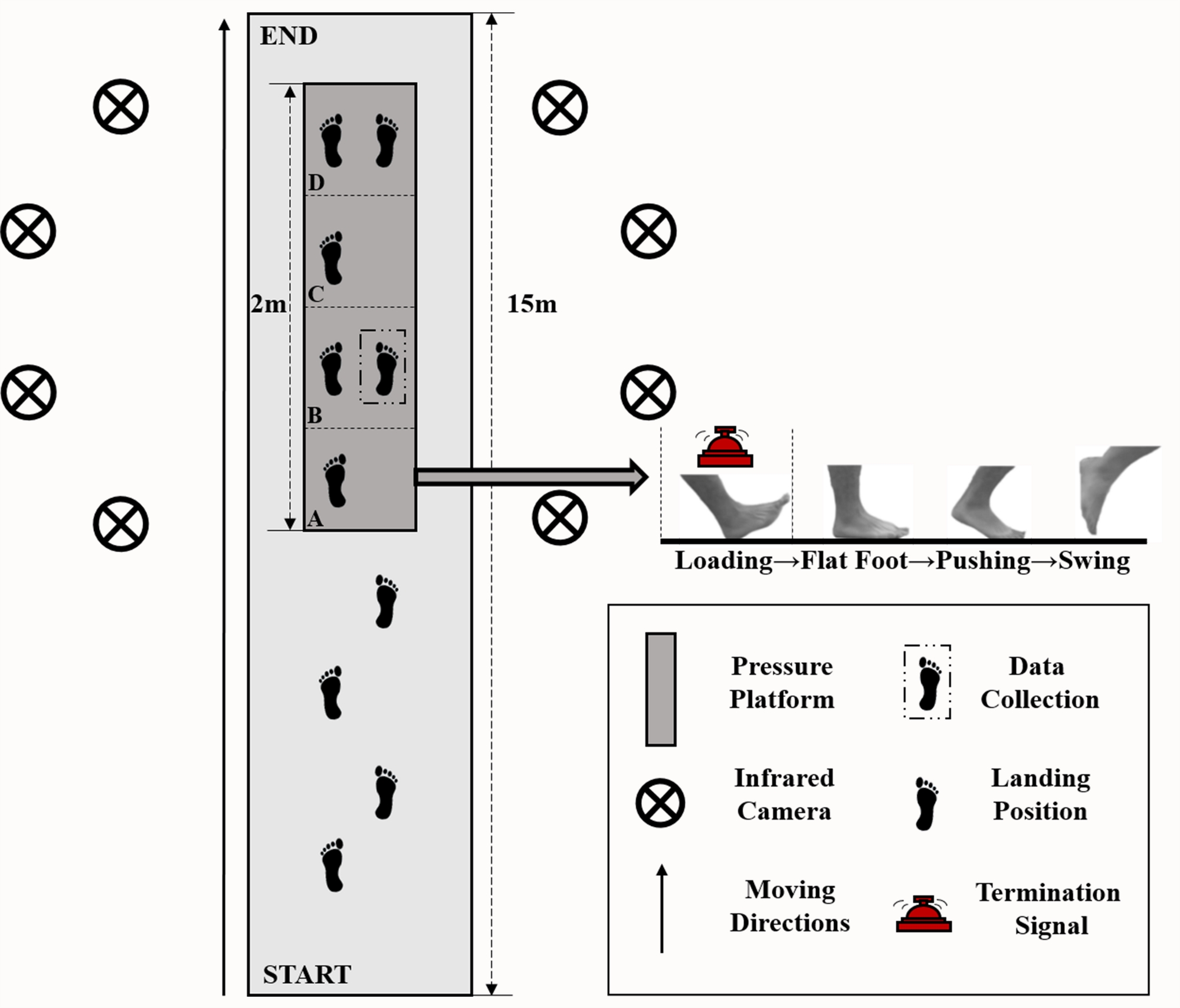
- Coloque la plataforma de presión de 2 m en el centro del área de prueba. Observe las ocho cámaras infrarrojas que se muestran alrededor de la plataforma de presión.
- Divida la plataforma de presión en cuatro áreas medias, A, B, C y D (cada área es de 50 cm * 50 cm) de una manera lineal y distinga con una etiqueta del alfabeto / pegatina (Figura 1).
- Mantenga el PC y la plataforma de presión conectados a través del cable de datos propietario.
- Haga doble clic en el icono de software del escritorio.
- Haga clic en"Calibración de peso"en la pantalla de calibración e introduzca la masa corporal de un pentagrama. Pídale que se para en la plataforma de presión, esperando hasta que el sistema complete la calibración automáticamente antes de que pueda salir de la plataforma de presión.

Figura 1: Protocolo experimental. Si los sujetos recibían la señal de terminación como el talón tocado zona(A),la UGT fue ejecutada para que el sujeto se detuviera en la zonaB). Los datos de presión cinemática y plantar se recopilaron sincrónicamente. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
2. Preparación del participante
- Antes de la prueba de UGT, entrevistar a todos los temas y darles una explicación sencilla sobre los objetivos y procedimientos experimentales. Obtenga el consentimiento informado por escrito de los sujetos que cumplan con los criterios clave de inclusión.
- Incluir participantes que son adultos varones físicamente activos, tienen la pierna derecha como dominante, no tienen ningún trastorno auditivo, no tienen trastornos de las extremidades inferiores y no han incurrido en lesiones en los últimos seis meses.
NOTA: 15 sujetos masculinos (edad: 24,1 ± 0,8 años; estatura: 175,7 ± 2,8 cm; peso corporal: 68,3 ± 3,3 kg; longitud del pie: 252,7 ± 2,1 mm) que cumplieron las condiciones experimentales fueron incluidos en esta prueba.
- Incluir participantes que son adultos varones físicamente activos, tienen la pierna derecha como dominante, no tienen ningún trastorno auditivo, no tienen trastornos de las extremidades inferiores y no han incurrido en lesiones en los últimos seis meses.
- Permita que todos los sujetos completen una encuesta de cuestionario.
NOTA: Las preguntas incluyen: ¿Has tenido antecedentes de correr u otras actividades físicas? ¿Con qué frecuencia haces actividades físicas en una semana? ¿Tienes algún entrenamiento deportivo profesional? ¿Ha sufrido algún trastorno y lesión en las extremidades inferiores en los últimos seis meses? - Asegúrese de que todos los sujetos lleven camisetas idénticas y pantalones ajustados.
- Mida la altura de pie de los sujetos (mm) y el peso corporal (kg), la longitud de las extremidades inferiores (mm), la anchura de la rodilla (mm) y la anchura del tobillo (mm) de la pierna izquierda y derecha utilizando pinza Vernier o un antropómetro pequeño.
NOTA: Mida la longitud de la extremidad inferior desde la columna ilíaca superior hasta la condimento medial del tobillo; el ancho de la rodilla desde el lateral hasta la condición medial de la rodilla; el ancho del tobillo desde el lateral hasta la condimento medial del tobillo. - Afeita el vello corporal según corresponda y elimina el exceso de sudor usando toallitas de alcohol. Prepare áreas de piel de puntos de referencia óseos anatómicos para la colocación de marcadores en articulaciones y segmentos.
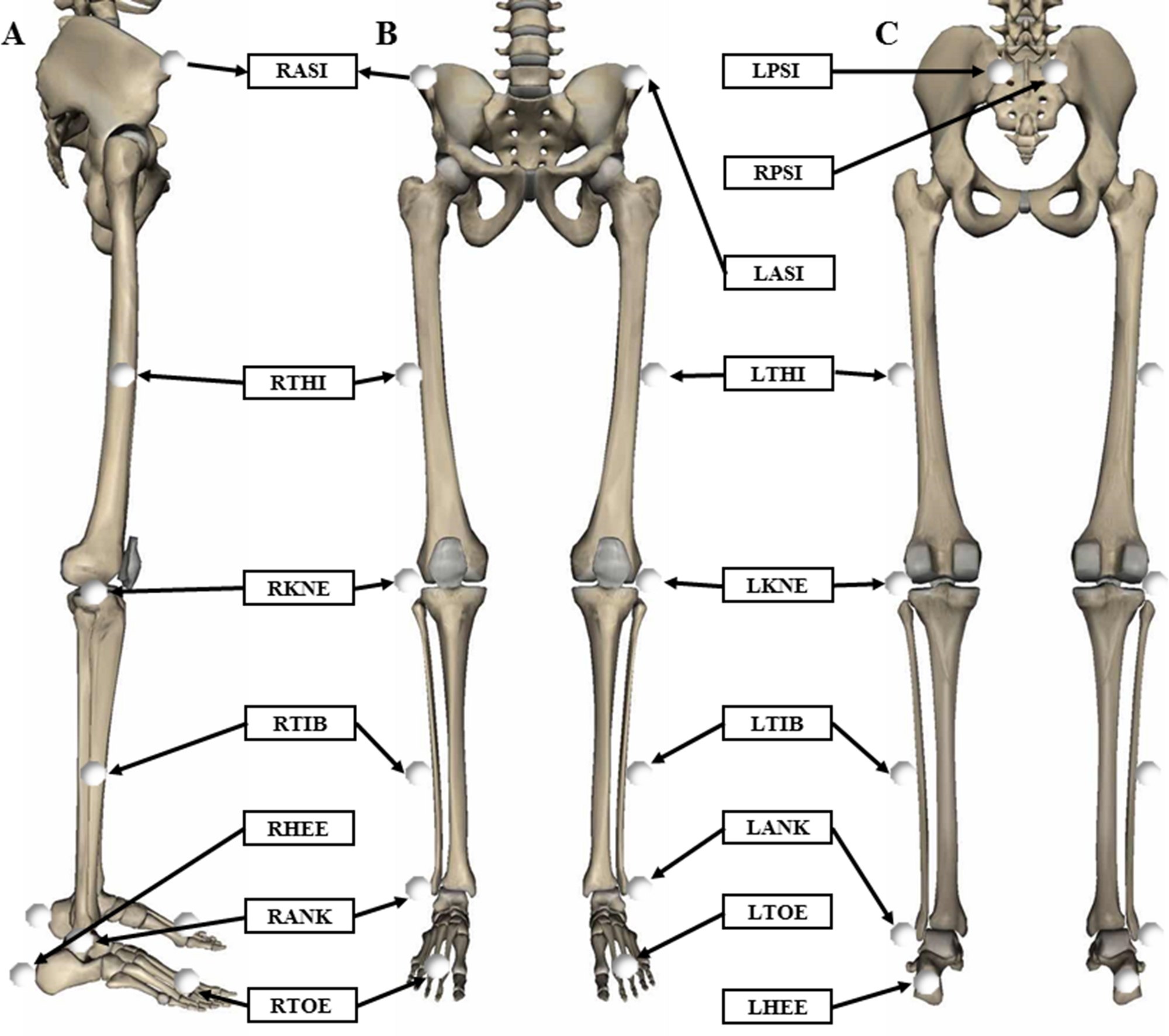
NOTA: Este estudio utilizó 16 marcadores reflectantes18,incluyendo columna ilíaca superior anterior (LASI/RASI), columna ilíaca superior posterior (LPSI/RPSI), muslo medio lateral (LTHI/RTHI), rodilla lateral (LKNE/RKNE), vástago medio lateral (LTIB/RTIB), malleolus lateral (LANK/RANK), segundo cabezal metatarsiano (LTOE/RTOE) y calcaneos (LHEE/RHEE) (Figura 2). - Identificar 16 puntos de referencia anatómicos. En los puntos de referencia, adjunte marcadores retrorreflectantes pasivos con cintas adhesivas de doble cara.
- Dé a cada sujeto 5 minutos para adaptarse al entorno de prueba y calentarse con ligero funcionamiento y estiramiento.

Figura 2: Los marcadores reflectantes unidos a las extremidades inferiores. (A) lateral, (B) delantero y (C) trasero. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
3. Calibración estática
- Cinemática: Sistema de captura de movimiento
- En el software de seguimiento, busque la"Nueva base de datos"en la barra de herramientas para crear una base de datos. Haga clic en el panel"Gestión de datos"para abrir el panel"Gestión de datos"y haga clic en el botón"Nueva clasificación del paciente","Nuevo paciente"y"Nueva sesión". Vuelva a la ventana "Recursos", seleccione el botón "Crear un nuevo sujeto" para crear un sujeto, e introduzca los valores de altura (mm), peso corporal (kg), longitud de la pierna (mm), ancho de rodilla (mm) y ancho del tobillo (mm) en el panel "Propiedades".
- Haga clic en el panel"Ir en vivo"y, a continuación, haga clic en"Dividir horizontalmente"en el panel"Ver". A continuación, seleccione el gráfico para ver el recuento de trayectorias.
NOTA: Marque el panel "Perspectiva 3D" para asegurarse de que los 16 marcadores están visibles. - Pida a los sujetos que se quede quietos en el área A. Haga clic en "Inicio" en la sección de captura de sujetos para capturar el modelo estático. Alrededor de 200 fotogramas de imágenes fueron capturados antes de hacer clic en el botón"Detener".
- En el panel "Herramientas", busque el botón "Canalización" y haga clic en "Ejecutar la canalización de reconstrucción" para construir una nueva imagen 3D de todos los marcadores capturados. Identifique en la lista de marcadores y aplique manualmente las etiquetas correspondientes a los marcadores. Guarde y pulse la tecla "ESC" para salir.
- Seleccione"Preparación del sujeto"y"Calibración del sujeto"en la barra de herramientas y elija la opción "Marcha enchufable estática" en el menú desplegable.
- Seleccione el panel"Pie izquierdo"y"Pie derecho"en el panel"Configuración estática"y haga clic en"Inicio". A continuación, guarde el modelo estático.
- Presión plantar: Plataforma de presión
- En el software, haga clic en "Base de datos" para agregar un nuevo paciente. E introduzca el número de asunto asignado en el panel"Agregar paciente". A continuación, haga clic en "Agregar".
- Haga clic en"Dinámico"e introduzca el peso corporal y el tamaño del zapato. A continuación, haga clic en "Aceptar".
4. Ensayos dinámicos
- Pida al sujeto que esté en la posición inicial.
- Operaciones de software
NOTA: Los dos tipos de inicio de software (sistema de captura de movimiento: haga clic en el botón"Capturar"; Plataforma de presión: haga clic en el botón"Capturar"y final (sistema de captura de movimiento: haga clic en el botón"Detener"; Plataforma de presión: haga clic en el botón"Guardar medición"),simultáneamente.- Cinemática: Sistema de captura de movimiento
- Seleccione el botón"Ir en vivo"en el panel "Recursos" y haga clic en "Capturar" en la barra de herramientas derecha. Encontrar "Tipo de prueba" y "Sesión" de arriba a abajo y editar la descripción "Prueba".
- Pida a los sujetos que realicen la prueba de UGT como se describe en 4.3.
- Tras finalizar la prueba de UGT, haga clic en"Parar"para finalizar el ensayo de recogida de datos. Repita los pasos anteriores durante 5 veces.
- Presión plantar: Plataforma de presión
- Seleccione el botón"Medir"antes de iniciar las pruebas de UGT.
- Después de finalizar la prueba de UGT, haga clic en el botón"Guardar medición"para guardar los datos. Repita los pasos anteriores durante 5 veces.
- Cinemática: Sistema de captura de movimiento
- Juicios de UGT
- Pida a los sujetos que caminen a lo largo de una pasarela en su NWS y les indiquen que usen la pierna dominante y la pierna no dominante para pasar el área A y B, respectivamente, y finalmente detenerse en el área D en la plataforma de presión.
- Haga saber al sujeto cuándo se proporciona la señal de terminación que necesitan parar rápidamente en el área B.
- Proporcionar aleatoriamente la señal de terminación a medida que el talón toca la zona A, asegurarse de que la UGT se ejecuta y los sujetos se detienen rápidamente en la zona B(Figura 1). El personal envía la señal de terminación tocando al azar una campana roja, y la probabilidad de sonar se controló en alrededor del 20%. Captura al menos cinco juicios sucesivos de UGT
NOTA: Hay un intervalo de descanso de 2 minutos entre ambas pruebas. - Calcule la velocidad de marcha de cada sujeto utilizando el software de la plataforma de presión. A continuación, calcule el FWS como el 125% del NWS.
- Repita la prueba anterior de UGT para el FWS. Captura al menos 5 pruebas sucesivas de UGT utilizando el protocolo FWS.
5. Postprocesamiento
- Cinemática: Sistema de captura de movimiento
- Busque el botón"Administración de datos"en la barra de herramientas y haga doble clic en el nombre de prueba en el panel"Administración de datos". A continuación, seleccione"Reconstruir"y "Etiquetar" para reconstruir el modelo dinámico 3D.
- En la barra"Tiempo",mueva los triángulos azules para establecer el rango de tiempo requerido (para la fase de postura durante UGT).
- Haga clic en la barra"Tiempo". A continuación, haga clic en "Zoom a región de interés" en el menú"Contexto".
- Haga clic en el botón "Etiquetar" para identificar y comprobar los puntos de etiqueta. Asegúrese de que los pasos sean los mismos que el proceso de identificación estática.
NOTA: Rellene algunos marcadores de identificación incompletos y elimine los marcadores sin etiquetar (si es necesario). - Elija la "Dynamic Plug-in Gait" en el panel"Subject Calibration". A continuación, haga clic en el botón"Iniciar"para ejecutar los datos. Exporte ensayos dinámicos en formato ".csv" para seguir el análisis de datos.
- Utilice un filtro Butterworth de paso bajo de cuarto orden con una frecuencia de corte de 10 Hz y exporte los datos del ángulo de la junta.
- Calcule el rango de movimiento (ROM) de tres articulaciones (cadera, rodilla y tobillo) en plano sagital.
NOTA: Defina las diferencias entre los ángulos máximos y los ángulos mínimos de la cadera, la rodilla y el tobillo en los planos de movimiento sagital como roms. - Calcular significa (M) y desviaciones estándar (SD) de los diez ensayos (5 para NWS y 5 para FWS) de cada sujeto.
- Presión plantar: Plataforma de presión
- Seleccione el nombre del ensayo en el menú"Medidas"de los sujetos correspondientes. Haga clic en el botón "Dinámico"para abrir datos.
- Haga clic en la selección "Manual". Utilice el botón"Ratón izquierdo"para seleccionar el paso de interés (la fase de postura durante GT). Haga clic en el botón "Aceptar"para guardar.
- Haga clic en la" División de zona" y " Selección manual dezona" para realizar ajustes. A continuación, haga clic en el botón"Aceptar"para guardar.
- Abra la pantalla"Presiones-Fuerzas"y haga clic en el botón "Composición del gráfico" para abrir la ventana " Composición del gráfico dezona". Divida 10 regiones anatómicas, incluyendo Big Toe (BT), Otros dedos de los pies (OT), Primer Metatarsiano (M1), Segundo Metatarsiano (M2), Tercer Metatarsiano (M3), Cuarto Metatarsiano (M4), Quinto Metatarsiano (M5), Pie Medio (MF), Tacón Medial (MH) y Talón Lateral (LH). A continuación, haga clic en el botón "Aceptar" para guardar.
- Haga clic en "Tabla de parámetros" para exportar datos de presión plantar, incluyendo presión máxima, fuerza máxima y área de contacto.
- Calcular medios y SDs para 10 ensayos (5 para NWS y 5 para FWS) de cada sujeto.
6. Análisis estadístico
- Realice las pruebas Shapiro-Wilks para comprobar la distribución normal de todas las variables. Utilice pruebas T con muestras emparejadas para comparar la cinemática de las extremidades inferiores y los datos de presión plantar durante UGT en NWS y FWS. Establezca el nivel de significancia en p < 0,05.
Access restricted. Please log in or start a trial to view this content.
Resultados
Los valores medios y SD de NWS y FWS de 15 sujetos fueron de 1,33 ± 0,07 m/s y 1,62 ± 0,11 m/s, respectivamente.
La Figura 3 muestra la ROM media de las articulaciones de cadera, rodilla y tobillo en el plano sagitario durante UGT en NWS y FWS. En comparación con nws, la ROM de tres juntas aumentó significativamente en FWS (p<0.05). En detalle, la ROM de las articulaciones de cadera, rodilla y tobillo aumentó de 22,26 ± 3,03, 29.72 ± 5.14 y 24.92 ± 4.17 a ...
Access restricted. Please log in or start a trial to view this content.
Discusión
La mayoría de los estudios previos que analizan la biomecánica de la marcha durante UGT omiten la importancia de caminar a velocidad en su evaluación biomecánica. Así, este estudio investigó los cambios biomecánicos de miembros inferiores que se producen en UGT en NWS y FWS con el objetivo de revelar los efectos relacionados con la velocidad.
Se han encontrado diferencias significativas en la ROM de las articulaciones de la cadera, la rodilla y el tobillo en el plano sagitario durante U...
Access restricted. Please log in or start a trial to view this content.
Divulgaciones
Los autores no informaron de ningún conflicto de intereses potencial.
Agradecimientos
NSFC-RSE Joint Project (81911530253), National Key I&D Program of China (2018YFF0300905) y K.C. Wong Magna Fund en la Universidad de Ningbo.
Access restricted. Please log in or start a trial to view this content.
Materiales
| Name | Company | Catalog Number | Comments |
| 14 mm Diameter Passive Retro-reflective Marker | Oxford Metrics Ltd., Oxford, UK | n=16 | |
| Double Adhesive Tape | Minnesota Mining and Manufacturing Corporation, Minnesota, USA | For fixing markers to skin | |
| Motion Tracking Cameras | Oxford Metrics Ltd., Oxford, UK | n= 8 | |
| T-Frame | Oxford Metrics Ltd., Oxford, UK | - | |
| Valid Dongle | Oxford Metrics Ltd., Oxford, UK | Vicon Nexus 1.4.116 | |
| Vicon Datastation ADC | Oxford Metrics Ltd., Oxford, UK | - | |
| Pressure platform | RSscan International, Olen, Belgium | - |
Referencias
- Cappozzo, A. Gait analysis methodology. Human Movement Science. 3 (1), 27-50 (1984).
- Gao, Z., Mei, Q., Fekete, G., Baker, J., Gu, Y. The Effect of Prolonged Running on the Symmetry of Biomechanical Variables of the Lower Limb Joints. Symmetry. 12, 720(2020).
- Sparrow, W. A., Tirosh, O. Gait termination: a review of experimental methods and the effects of ageing and gait pathologies. Gait & Posture. 22 (4), 362-371 (2005).
- Conte, C., et al. Planned Gait Termination in Cerebellar Ataxias. The Cerebellum. 11 (4), 896-904 (2012).
- Bishop, M. D., Brunt, D., Pathare, N., Patel, B. The interaction between leading and trailing limbs during stopping in humans. Neuroscience Letters. 323 (1), 1-4 (2002).
- Jaeger, R. J., Vanitchatchavan, P. Ground reaction forces during termination of human gait. Journal of Biomechanics. 25 (10), 1233-1236 (1992).
- Cen, X., Jiang, X., Gu, Y. Do different muscle strength levels affect stability during unplanned gait termination. Acta of Bioengineering and Biomechanics. 21 (4), 27-35 (2019).
- O'Kane, F. W., McGibbon, C. A., Krebs, D. E. Kinetic analysis of planned gait termination in healthy subjects and patients with balance disorders. Gait & Posture. 17 (2), 170-179 (2003).
- Bishop, M., Brunt, D., Pathare, N., Patel, B. The effect of velocity on the strategies used during gait termination. Gait & Posture. 20 (2), 134-139 (2004).
- Ridge, S. T., Henley, J., Manal, K., Miller, F., Richards, J. G. Biomechanical analysis of gait termination in 11–17year old youth at preferred and fast walking speeds. Human Movement Science. 49, 178-185 (2016).
- Sun, D., Fekete, G., Mei, Q., Gu, Y. The effect of walking speed on the foot inter-segment kinematics, ground reaction forces and lower limb joint moments. PeerJ. 6, 5517(2018).
- Eerdekens, M., Deschamps, K., Staes, F. The impact of walking speed on the kinetic behaviour of different foot joints. Gait & Posture. 68, 375-381 (2019).
- Wang, Z. p, Qiu, Q. e, Chen, S. h, Chen, B. c, Lv, X. t Effects of Unstable Shoes on Lower Limbs with Different Speeds. Physical Activity and Health. 3, 82-88 (2019).
- Tirosh, O., Sparrow, W. A. Age and walking speed effects on muscle recruitment in gait termination. Gait & Posture. 21 (3), 279-288 (2005).
- Xiang, L., Mei, Q., Fernandez, J., Gu, Y. A biomechanical assessment of the acute hallux abduction manipulation intervention. Gait & Posture. 76, 210-217 (2020).
- Zhou, H., Ugbolue, U. C. Is There a Relationship Between Strike Pattern and Injury During Running: A Review. Physical Activity and Health. 3 (1), 127-134 (2019).
- Serrao, M., et al. Sudden Stopping in Patients with Cerebellar Ataxia. The Cerebellum. 12 (5), 607-616 (2013).
- Zhang, Y., et al. Using Gold-standard Gait Analysis Methods to Assess Experience Effects on Lower-limb Mechanics During Moderate High-heeled Jogging and Running. Journal of Visualized Experiments. (127), e55714(2017).
- Buddhadev, H. H., Barbee, C. E. Redistribution of joint moments and work in older women with and without hallux valgus at two walking speeds. Gait & Posture. 77, 112-117 (2020).
- Yu, P., et al. Morphology-Related Foot Function Analysis: Implications for Jumping and Running. Applied Sciences. 9 (16), 3236(2019).
- Ridge, S. T., Henley, J., Manal, K., Miller, F., Richards, J. G. Kinematic and kinetic analysis of planned and unplanned gait termination in children. Gait & Posture. 37 (2), 178-182 (2013).
- Burnfield, J. M., Few, C. D., Mohamed, O. S., Perry, J. The influence of walking speed and footwear on plantar pressures in older adults. Clinical Biomechanics. 19 (1), 78-84 (2004).
- Cen, X., Xu, D., Baker, J. S., Gu, Y. Effect of additional body weight on arch index and dynamic plantar pressure distribution during walking and gait termination. PeerJ. 8, 8998(2020).
- Chatzipapas, C. N., et al. Stress Fractures in Military Men and Bone Quality Related Factors. International Journal of Sports Medicine. 29 (11), 922-926 (2008).
- Cen, X., Xu, D., Baker, J. S., Gu, Y. Association of Arch Stiffness with Plantar Impulse Distribution during Walking, Running, and Gait Termination. International Journal of Environmental Research and Public Health. 17 (6), 2090(2020).
Access restricted. Please log in or start a trial to view this content.
Reimpresiones y Permisos
Solicitar permiso para reutilizar el texto o las figuras de este JoVE artículos
Solicitar permisoThis article has been published
Video Coming Soon
ACERCA DE JoVE
Copyright © 2025 MyJoVE Corporation. Todos los derechos reservados