
Un abonnement à JoVE est nécessaire pour voir ce contenu. Connectez-vous ou commencez votre essai gratuit.
Method Article
Caractéristiques biomécaniques des membres inférieurs associées à la terminaison imprévue de la démarche sous différentes vitesses de marche
Dans cet article
Résumé
Cette étude a comparé les caractéristiques biomécaniques de l’extrémité inférieure pendant la terminaison imprévue de démarche sous différentes vitesses de marche. Les données cinétiques et cinétiques des membres inférieurs de quinze sujets ayant des vitesses de marche normales et rapides ont été recueillies à l’aide d’un système d’analyse de mouvement et d’une plate-forme de pression plantaire.
Résumé
La terminaison de démarche provoquée par le stimulus inattendu est un événement commun dans la vie quotidienne. Cette étude présente un protocole pour étudier les changements biomécaniques des membres inférieurs qui se produisent pendant l’arrêt imprévu de la démarche (UGT) à différentes vitesses de marche. Quinze participants masculins ont été invités à effectuer l’UGT sur une passerelle à une vitesse de marche normale (NWS) et à une vitesse de marche rapide (FWS), respectivement. Un système d’analyse de mouvement et une plate-forme de pression plantaire ont été appliqués pour recueillir des données sur la pression cinétique et plantaire des membres inférieurs. Le test T échantillonné a été utilisé pour examiner les différences dans la cinématique des membres inférieurs et les données de pression plantaire entre deux vitesses de marche. Les résultats ont montré une plus grande gamme de mouvement dans les articulations de hanche, de genou, et de cheville dans le plan sagittal aussi bien que la pression plantaire dans les régions d’avant-pied et de talon pendant UGT à FWS par rapport à NWS. Avec l’augmentation de la vitesse de marche, les sujets ont montré différentes caractéristiques biomécaniques des membres inférieurs qui montrent FWS associé à de plus grands risques potentiels de blessures.
Introduction
La locomotion humaine est considérée comme un processus extrêmement complexe qui doit être décrit par les méthodesmultidisciplinaires 1,2. L’aspect le plus représentatif est l’analyse de la démarche par des approches biomécaniques. La démarche humaine vise à soutenir la progression de l’initiation à la terminaison, et l’équilibre dynamique doit être maintenu dans le mouvement de position. Bien que la terminaison de démarche (GT) ait été étudiée intensivement comme sous-tâche de démarche, elle a reçu moins d’attention. Sparrow et Tirosh3 ont défini GT dans leur examen comme une période de contrôle moteur lorsque les deux pieds cessent de se déplacer vers l’avant ou vers l’arrière en fonction du déplacement et des caractéristiques du temps. Par rapport à la démarche à l’état stable, le processus d’exécution de gt exige un contrôle plus élevé de la stabilité posturale et l’intégration complexe et la coopération du système neuromusculaire4. Pendant GT, le corps doit augmenter rapidement l’impulsion de freinage et diminuer l’impulsion de propulsion pour former un nouvel équilibrecorporel 5,6. La terminaison imprévue de démarche (UGT) est une réponse de stress à un stimulus inconnu6. Lorsqu’il est confronté à un stimulus inattendu qui exige qu’on s’arrête soudainement, l’équilibre dynamique initial sera perturbé. En raison de la nécessité du contrôle continu du centre de masse du corps (COM) et du contrôle de rétroaction, UGT pose un plus grand défi au contrôle postural et à la stabilité3,7.
UGT a été rapporté pour être un facteur important menant aux chutes et aux dommages, particulièrement dans les personnes âgées et les patients présentant des désordresd’équilibre 3,8. Des vitesses de marche plus rapides peuvent entraîner une baisse supplémentaire du contrôle moteur pendant l’UGT9. Ridge et coll.10 ont étudié l’angle commun de pointe et les données internes sur les moment communs des enfants pendant l’UGT à la vitesse normale de marche (NWS) et à la vitesse de marche rapide (FWS). Les résultats ont montré de plus grands angles de flexion du genou et des moments d’extension à des vitesses plus rapides par rapport à la vitesse préférée. Ils ont indiqué que le renforcement des muscles connexes entourant les articulations inférieures de l’extrémité pourrait être une intervention utile pour la prévention des blessures pendant l’UGT.
Bien que l’effet de la vitesse de marche sur le caractère biomécanique des membres inférieurs pendant la démarche à l’état stable ait étélargement étudié 11,12,13, le mécanisme biomécanique de l’UGT sous différentes vitesses de marche est limité. À notre connaissance, seulement trois études ont spécifiquement évalué les performances ugt des individus en bonne santé en ce qui concerne les effetsde vitesse 9,10,14. Cependant, les sujets dans ces études étaient principalement lespersonnes âgées 14 etles enfants 10,le mécanisme biomécanique des jeunes adultes pendant UGT est encore peu clair. La cinématique des membres inférieurs et la pression plantaire peuvent fournir une analyse précise de la biomécanique de locomotion, et ceux-ci sont également considérés comme des composants cruciaux pour les diagnostics cliniques dedémarche 15,16. Par exemple, Serrao et coll.17 ont utilisé des données cinématiques des membres inférieurs pour détecter les différences cliniques entre les patients atteints d’ataxie cerebellar et leurs homologues en bonne santé lors d’un arrêt soudain. En outre, comparé à l’arrêt prévu de démarche (PGT), la pression et la force maximales plus grandes dans le métatarsien latéral pendant UGT ont pu êtreobservées 7,qui peuvent être associées aux risques plus élevés de blessure.
Par conséquent, l’exploration des mécanismes biomécaniques de l’UGT pourrait fournir un aperçu de la prévention des blessures et d’autres recherches cliniques. Cette étude présente un protocole pour étudier toute altération biomécanique chez les jeunes adultes pendant ugt sous différentes vitesses de marche. On émet l’hypothèse qu’avec une augmentation de la vitesse de marche, les participants présenteraient différentes caractéristiques biomécaniques des membres inférieurs pendant l’UGT.
Protocole
Le Comité d’éthique humaine de l’Université de Ningbo a approuvé cette expérience. Tous les consentements éclairés écrits ont été obtenus de tous les sujets après qu’on leur ait parlé de l’objectif, des exigences et des procédures expérimentales de l’expérience UGT.
1. Préparation en laboratoire pour la démarche
- Cinématique : Système de capture de mouvement
- Lors de l’étalonnage du système, éteignez les lumières incandescentes et retirez tous les objets réfléchissants possibles qui peuvent être confondus avec des marqueurs rétro-réfléchissants passifs. Assurez-vous que huit caméras infrarouges sont correctement dirigées et ont une vue claire et raisonnable.
- Branchez le dongle USB approprié dans le port parallèle du PC. Allumez les caméras infrarouges de capture de mouvement et le convertisseur analogique à numérique.
- Ouvrez le logiciel de suivi dans le PC et laissez le temps aux huit caméras infrarouges de para paramètre. Sélectionnez lenœud« Local System » duvolet« Ressources ». Chaque nœud de caméra affichera un feu vert si la connexion matérielle est vraie.
- Ajustez les paramètres du système dans le volet de vue caméra : réglez l’intensité stroboscopique à 0,95 - 1, seuil à 0,2 - 0,4, gain aux temps 1 (x1), mode grayscale à automatique, rapport de circularité minimum à 0,5 et hauteur max blob à 50.
- Placez le cadre T composé de 5 marqueurs au centre de la zone de capture de mouvement. Sélectionnez toutes les caméras en mode 2D et confirmez qu’elles peuvent afficher la baguette d’étalonnage (T-frame) sans aucune interférence et/ou artefact. Cliquez surl’élément« Préparation du système » dans la barre d’outils et sélectionnez l’objet d’étalonnage Wand & T-Frame de 5 marqueurs de la liste de drop-down T-Frame.
- Dans le volet" Outil« , sélectionnez le bouton "Préparation dusystème " et cliquez sur le bouton "Démarrer" dans la section "Caméras calibrées« . Ensuite, agitez physiquement le cadre T dans la plage de capture. Arrêtez l’action lorsque les lumières bleues des caméras infrarouges cessent de clignoter. Surveillez la barre de progression jusqu’à ce que le processus d’étalonnage soitterminé à « 100 %» et revient à «0% ».
REMARQUE : Assurez-vous que les valeurs de l’erreur d’image sont inférieures à 0,3. - Placez le cadre en T sur le sol (le centre de la zone de capture de mouvement) et assurez-vous que les axes du cadre en T sont compatibles avec la direction du cap.
- Sélectionnez lebouton " Démarrer" sous la section " Set VolumeOrigin" dans le volet Outil.
- Pression plantaire : Plate-forme de pression
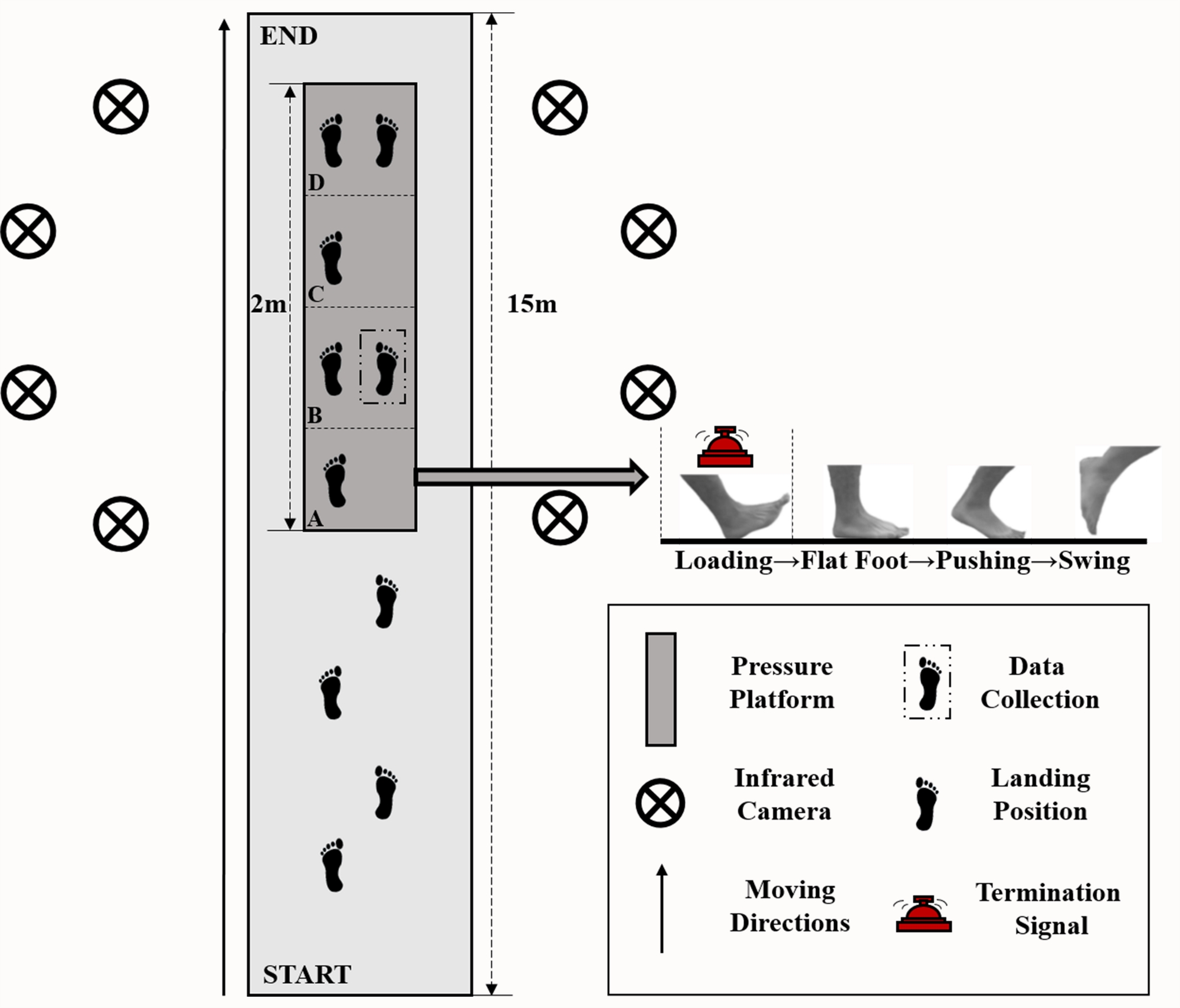
- Placez la plate-forme de pression de 2 m au centre de la zone d’essai. Remarquez les huit caméras infrarouges affichées autour de la plate-forme de pression.
- Divisez la plate-forme de pression en quatre zones moyennes, A, B, C et D (chaque zone est de 50 cm * 50 cm) de façon linéaire et distinguez-les avec une étiquette d’alphabet / autocollant (Figure 1).
- Gardez le PC et la plate-forme de pression connectés via le câble de données propriétaire.
- Double-cliquez sur l’icône logicielle sur le bureau.
- Cliquez surl’étalonnage de poids surl’écran d’étalonnage et entrez la masse corporelle d’un personnel. Demandez-lui de se tenir debout sur la plate-forme de pression, en attendant que le système termine automatiquement l’étalonnage avant qu’il ne puisse quitter la plate-forme de pression.

Figure 1 : Protocole expérimental. Si les sujets recevaient le signal de terminaison lorsque le talon touchaitla zone( A ), l’UGT a été exécuté de sorte que le sujet s’est arrêté dans la zone( B). Les données sur la pression cinétique et plantaire ont été recueillies de façon synchrone. S’il vous plaît cliquez ici pour voir une version plus grande de ce chiffre.
{kind=link}
2. Préparation des participants
- Avant le test UGT, interviewez tous les sujets et fournissez-leur une explication simple sur les objectifs et procédures expérimentaux. Obtenir un consentement éclairé écrit de sujets qui répondent aux principaux critères d’inclusion.
- Inclure les participants qui sont des adultes masculins physiquement actifs, qui ont la jambe droite comme dominante, qui n’ont pas de troubles auditifs, qui n’ont pas de troubles des membres inférieurs et qui n’ont pas subi de blessures au cours des six derniers mois.
NOTE: 15 sujets masculins (âge: 24,1 ± 0,8 ans; hauteur: 175,7 ± 2,8 cm; poids corporel: 68,3 ± 3,3 kg; longueur du pied: 252,7 ± 2,1 mm) qui ont rencontré les conditions expérimentales ont été inclus dans ce test.
- Inclure les participants qui sont des adultes masculins physiquement actifs, qui ont la jambe droite comme dominante, qui n’ont pas de troubles auditifs, qui n’ont pas de troubles des membres inférieurs et qui n’ont pas subi de blessures au cours des six derniers mois.
- Permettre à tous les sujets de remplir un questionnaire.
REMARQUE : Les questions comprennent : Avez-vous des antécédents de course à pied ou d’autres activités physiques? À quelle fréquence faites-vous des activités physiques en une semaine? Avez-vous une formation sportive professionnelle? Avez-vous souffert de troubles et de blessures aux membres inférieurs au cours des six derniers mois? - Assurez-vous que tous les sujets portent des t-shirts identiques et des pantalons moulants.
- Mesurer la hauteur debout (mm) et le poids corporel (kg) des sujets, la longueur inférieure des membres (mm), la largeur du genou (mm) et la largeur de la cheville (mm) de la jambe gauche et droite à l’aide d’un étrier Vernier ou d’un petit anthropomètre.
NOTE : Mesurez la longueur inférieure de membre de la colonne vertébrale iliaque supérieure au condyle médial de cheville ; la largeur du genou du côté à la condyle médiale du genou; la largeur de la cheville de la condyle latérale à la cheville médiale. - Raser les poils du corps au besoin et enlever l’excès de sueur à l’aide de lingettes d’alcool. Préparer les zones cutanées des repères osseux anatomiques pour le placement des marqueurs sur les articulations et les segments.
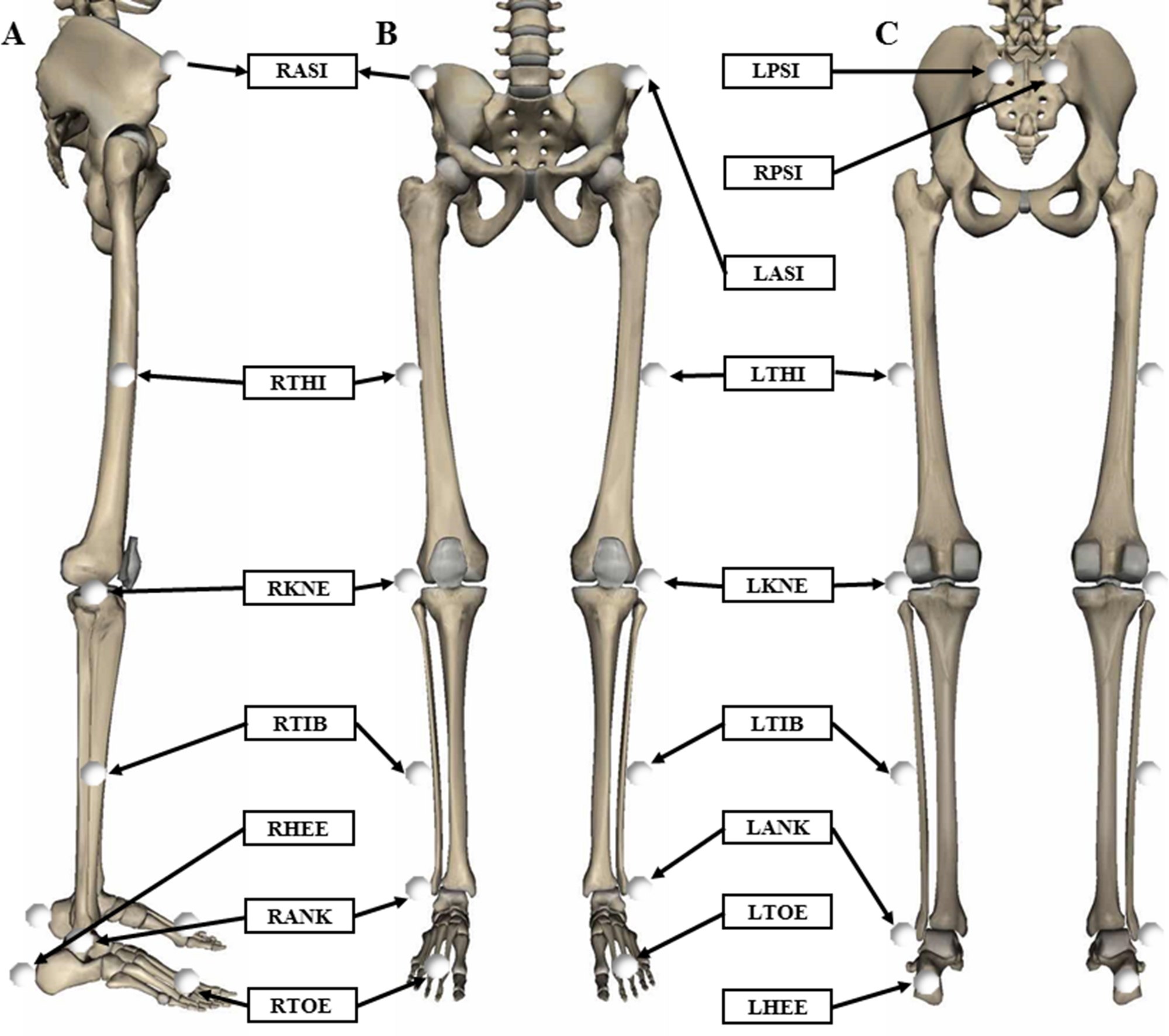
NOTE : Cette étude a employé 16 marqueursréfléchissants 18,y compris la colonne vertébrale iliaque antérieure-supérieure (LASI/RASI), la colonne vertébrale iliaque postérieure-supérieure (LPSI/RPSI), la mi-cuisse latérale (LTHI/RTHI), le genou latéral (LK NE/RKNE), tige médiane latérale (LTIB/RTIB), malleolus latéral (LANK/RANK), deuxième tête métatarsale (LTOE/RTOE) et calcanée (LHEE/RHEE) (Figure 2). - Identifiez 16 repères anatomiques. Sur les repères, fixez des marqueurs rétro-réfléchissants passifs avec des rubans adhésifs à double face.
- Donnez à chaque sujet 5 min pour s’adapter à l’environnement d’essai et réchauffez-vous avec un fonctionnement léger et des étirements.

Figure 2 : Les marqueurs réfléchissants fixés aux membres inférieurs. (A) côté, (B) avant et (C) arrière. S’il vous plaît cliquez ici pour voir une version plus grande de ce chiffre.
{kind=link}
3. Étalonnage statique
- Cinématique : Système de capture de mouvement
- Dans le logiciel de suivi, trouvez la « nouvellebase de données »dans la barre d’outils pour créer une base de données. Cliquez sur la "Gestion des données" pour ouvrir le volet "Gestiondes données " et cliquez pour obtenir le bouton " Nouvelleclassification despatients « , " Nouveaupatient" et "Nouvellesession « . Retournez à la fenêtre «Ressources», sélectionnez le bouton «Créer un nouveausujet » pour créer un sujet et entrez les valeurs de hauteur (mm), de poids corporel (kg), de longueur des jambes (mm), de largeur du genou (mm) et de largeur de la cheville (mm) dans le volet «Propriétés».
- Cliquez sur le" Go Live" puis cliquez sur le " SplitHorizontally" dans le volet "Voir« . Sélectionnez ensuite le graphique pour afficher le nombre de trajectoires.
REMARQUE : Vérifiez le volet« Perspective 3D» pour vous assurer que les 16 marqueurs sont visibles. - Demandez aux sujets de rester immobiles dans la zone A. Cliquez sur "Démarrer" dans la section capture du sujet pour capturer le modèle statique. Environ 200 images ont été capturées avant de cliquer sur le bouton" Stop« .
- Dans le volet« Outils», trouvez le bouton «Pipeline» et cliquez sur « Exécuter le pipelinede reconstruction» pour construire une nouvelle image 3D de tous les marqueurs capturés. Identifiez-les dans la liste des marqueurs et appliquez manuellement les étiquettes correspondantes aux marqueurs. Enregistrer et appuyer sur "ESC" clé de sortie.
- Sélectionnez «Préparation dusujet » et «Étalonnage du sujet» dans la barre d’outils et choisissez l’option « Démarcheplug-in statique» dans le menu drop-down.
- Sélectionnez le" Left Foot" et le " RightFoot" dans le volet "Paramètresstatiques " et cliquez sur le "Démarrer« . Ensuite, enregistrez le modèle statique.
- Pression plantaire : Plate-forme de pression
- Dans le logiciel, cliquez sur "Base dedonnées " pour ajouter un nouveau patient. Et entrez le numéro de sujet assigné dansle volet" Ajouter le patient « . Ensuite, cliquez sur "Ajouter« .
- Cliquez sur "Dynamique" et entrez le poids corporel et la taille des chaussures. Ensuite, cliquez sur "OK« .
4. Essais dynamiques
- Demandez au sujet d’être à la position de départ.
- Opérations logicielles
REMARQUE : Les deux types de démarrage logiciel (système de capture de mouvement : cliquez sur lebouton « Capture» ; Plate-forme de pression :cliquez surle bouton « Capture ») et terminez (Système de capture de mouvement : cliquez sur le bouton «Stop» ; Plate-forme de pression:cliquez sur" Enregistrer la mesure " bouton), simultanément.- Cinématique : Système de capture de mouvement
- Sélectionnez lebouton " Go Live" dans le volet "Ressources" et cliquez sur " Capture "dansla bonne barre d’outils. Trouvez «Trial Type» et «Session »de haut en bas et modifiez la description « Trial ».
- Demandez aux sujets d’effectuer le test UGT tel que décrit dans 4.3.
- Après avoir terminé le test UGT, cliquez sur " Stop "pour mettrefin à l’essai de collecte de données. Répétez les étapes ci-dessus pendant 5 fois.
- Pression plantaire : Plate-forme de pression
- Sélectionnez le bouton"Mesure " avant de commencer les essais UGT.
- Après avoir terminé le test UGT, cliquez sur lebouton " Enregistrer lamesure " pour enregistrer les données. Répétez les étapes ci-dessus pendant 5 fois.
- Cinématique : Système de capture de mouvement
- Essais UGT
- Demandez aux sujets de marcher le long d’une passerelle à leur NWS et demandez-leur d’utiliser la jambe dominante et la jambe non dominante pour passer la zone A et B, respectivement, et enfin s’arrêter à la zone D sur la plate-forme de pression.
- Faites savoir au sujet quand le signal de terminaison est fourni, ils doivent s’arrêter rapidement sur la zone B.
- Fournissez au hasard le signal de terminaison lorsque le talon touche la zone A, assurez-vous que l’UGT est exécuté et que les sujets s’arrêtent rapidement sur la zone B (figure 1). Le personnel envoie le signal de terminaison en sonnant au hasard une cloche rouge, et la probabilité de sonnerie a été contrôlée à environ 20%. Capturez au moins cinq essais UGT successifs.
REMARQUE : Il y a un intervalle de repos de 2 minutes entre les deux essais. - Calculez la vitesse de marche de chaque sujet à l’aide du logiciel de plate-forme de pression. Ensuite, calculez le FWS comme 125% du NWS.
- Répétez le test UGT ci-dessus pour le FWS. Capturez au moins 5 essais UGT successifs en utilisant le protocole FWS.
5. Post-traitement
- Cinématique : Système de capture de mouvement
- Trouvez le bouton «Gestion des données» dans la barre d’outils et cliquez deux fois sur le nom de l’essai dans le volet «Gestiondes données ». Ensuite,sélectionnez " Reconstruire" et "Label" pour reconstruire le modèle dynamique 3D.
- Sur la barre" Temps« , déplacez les triangles bleus pour définir la plage de temps requise (pour la phase de position pendant l’UGT).
- Cliquez sur la barre" Time« . Cliquez ensuite sur" Zoom to Region-of-Interest" danslemenu " Contexte « .
- Cliquez sur le bouton" Étiquette" pour identifier et vérifier les points d’étiquette. Assurez-vous que les étapes sont les mêmes que le processus d’identification statique.
REMARQUE : Remplissez certains marqueurs d’identification incomplets et supprimez les marqueurs non étiquetés (si nécessaire). - Choisissez la «démarche dynamique plug-in» dans le volet« Étalonnagedu sujet ». Cliquez ensuite sur lebouton " Démarrer" pour exécuter les données. Exporter des essais dynamiques en format « .csv » pour suivre l’analyse des données.
- Utilisez un filtre Butterworth à faible passage de quatrième ordre avec une fréquence de coupure de 10 Hz et exportez les données de l’angle commun.
- Calculer l’étendue du mouvement (ROM) de trois articulations (hanche, genou et cheville) en plan sagittal.
REMARQUE : Définissez les différences entre les angles maximaux et les angles minimaux de la hanche, du genou et de la cheville sur les plans de mouvement sagittal comme les ROM. - Calculer les moyens (M) et les écarts types (SD) des dix essais (5 pour NWS et 5 pour FWS) de chaque sujet.
- Pression plantaire : Plate-forme de pression
- Sélectionnez le nom de l’essaidans lemenu « Mesures » des sujets correspondants. Cliquez sur lebouton "Dynamique " pour ouvrir les données.
- Cliquez sur lasélection "Manuel « . Utilisez le bouton "Gauche souris" pour sélectionner l’étape d’intérêt (la phase de position pendant GT). Cliquez sur le bouton "OK" pour enregistrer.
- Cliquez sur la "Zone Division" et " ManualZone Selection" pour effectuer des réglages. Cliquez ensuite sur lebouton " Accepter" pour enregistrer.
- Ouvrezl’écran « Pressions-Forces» et cliquez sur le bouton «Compositiongraphique » pour ouvrir la fenêtre «Composition graphiquede zone ». Divisez 10 régions anatomiques, dont Big Toe (BT), Other Toes (OT), First Metatarsal (M1), Second Metatarsals (M2), Third Metatarsal (M3), Fourth Metatarsal (M4), Fifth Metatarsal (M5), Mid-Foot (MF), Medial Heel (MH) et Lateral Heel (LH). Cliquez ensuite sur le bouton "OK" pour enregistrer.
- Cliquez sur "Tableau des paramètres" pour exporter les données de pression plantaire, y compris la pression maximale, la force maximale et la zone de contact.
- Calculez les moyens et les DD pour 10 essais (5 pour NWS et 5 pour FWS) de chaque sujet.
6. Analyse statistique
- Effectuez les tests Shapiro-Wilks pour vérifier la distribution normale de toutes les variables. Utilisez des tests T échantillonnés pour comparer la cinématique des membres inférieurs et les données de pression plantaire pendant l’UGT à NWS et FWS. Réglez le niveau d’importance à p < 0,05.
Résultats
Les valeurs moyennes et SD de NWS et FWS de 15 sujets étaient 1,33 ± 0,07 m/s et 1,62 ± 0,11 m/s, respectivement.
La figure 3 montre la ROM moyenne des articulations de la hanche, du genou et de la cheville dans le plan sagittal pendant l’UGT au NWS et au FWS. Comparé à NWS, le ROM de trois joints a augmenté de manière significative à FWS (p<0.05). Dans le détail, le ROM des articulations de la hanche, du genou et de la cheville est passé de 22,26 ± ?...
Discussion
La plupart des études antérieures qui analysent la biomécanique de la démarche pendant l’UGT omettent l’importance de la vitesse de marche dans leur évaluation biomécanique. Ainsi, cette étude a étudié les changements biomécaniques des membres inférieurs qui se produisent dans UGT à NWS et FWS dans le but de révéler les effets liés à la vitesse.
Des différences significatives ont été trouvées sur le ROM des articulations de hanche, de genou, et de cheville dans le plan ...
Déclarations de divulgation
Aucun conflit d’intérêts potentiel n’a été signalé par les auteurs.
Remerciements
Projet conjoint NSFC-RSE (81911530253), National Key R&D Program of China (2018YFF0300905) et K.C. Wong Magna Fund à l’Université de Ningbo.
matériels
| Name | Company | Catalog Number | Comments |
| 14 mm Diameter Passive Retro-reflective Marker | Oxford Metrics Ltd., Oxford, UK | n=16 | |
| Double Adhesive Tape | Minnesota Mining and Manufacturing Corporation, Minnesota, USA | For fixing markers to skin | |
| Motion Tracking Cameras | Oxford Metrics Ltd., Oxford, UK | n= 8 | |
| T-Frame | Oxford Metrics Ltd., Oxford, UK | - | |
| Valid Dongle | Oxford Metrics Ltd., Oxford, UK | Vicon Nexus 1.4.116 | |
| Vicon Datastation ADC | Oxford Metrics Ltd., Oxford, UK | - | |
| Pressure platform | RSscan International, Olen, Belgium | - |
Références
- Cappozzo, A. Gait analysis methodology. Human Movement Science. 3 (1), 27-50 (1984).
- Gao, Z., Mei, Q., Fekete, G., Baker, J., Gu, Y. The Effect of Prolonged Running on the Symmetry of Biomechanical Variables of the Lower Limb Joints. Symmetry. 12, 720 (2020).
- Sparrow, W. A., Tirosh, O. Gait termination: a review of experimental methods and the effects of ageing and gait pathologies. Gait & Posture. 22 (4), 362-371 (2005).
- Conte, C., et al. Planned Gait Termination in Cerebellar Ataxias. The Cerebellum. 11 (4), 896-904 (2012).
- Bishop, M. D., Brunt, D., Pathare, N., Patel, B. The interaction between leading and trailing limbs during stopping in humans. Neuroscience Letters. 323 (1), 1-4 (2002).
- Jaeger, R. J., Vanitchatchavan, P. Ground reaction forces during termination of human gait. Journal of Biomechanics. 25 (10), 1233-1236 (1992).
- Cen, X., Jiang, X., Gu, Y. Do different muscle strength levels affect stability during unplanned gait termination. Acta of Bioengineering and Biomechanics. 21 (4), 27-35 (2019).
- O'Kane, F. W., McGibbon, C. A., Krebs, D. E. Kinetic analysis of planned gait termination in healthy subjects and patients with balance disorders. Gait & Posture. 17 (2), 170-179 (2003).
- Bishop, M., Brunt, D., Pathare, N., Patel, B. The effect of velocity on the strategies used during gait termination. Gait & Posture. 20 (2), 134-139 (2004).
- Ridge, S. T., Henley, J., Manal, K., Miller, F., Richards, J. G. Biomechanical analysis of gait termination in 11–17year old youth at preferred and fast walking speeds. Human Movement Science. 49, 178-185 (2016).
- Sun, D., Fekete, G., Mei, Q., Gu, Y. The effect of walking speed on the foot inter-segment kinematics, ground reaction forces and lower limb joint moments. PeerJ. 6, 5517 (2018).
- Eerdekens, M., Deschamps, K., Staes, F. The impact of walking speed on the kinetic behaviour of different foot joints. Gait & Posture. 68, 375-381 (2019).
- Wang, Z. p., Qiu, Q. e., Chen, S. h., Chen, B. c., Lv, X. t. Effects of Unstable Shoes on Lower Limbs with Different Speeds. Physical Activity and Health. 3, 82-88 (2019).
- Tirosh, O., Sparrow, W. A. Age and walking speed effects on muscle recruitment in gait termination. Gait & Posture. 21 (3), 279-288 (2005).
- Xiang, L., Mei, Q., Fernandez, J., Gu, Y. A biomechanical assessment of the acute hallux abduction manipulation intervention. Gait & Posture. 76, 210-217 (2020).
- Zhou, H., Ugbolue, U. C. Is There a Relationship Between Strike Pattern and Injury During Running: A Review. Physical Activity and Health. 3 (1), 127-134 (2019).
- Serrao, M., et al. Sudden Stopping in Patients with Cerebellar Ataxia. The Cerebellum. 12 (5), 607-616 (2013).
- Zhang, Y., et al. Using Gold-standard Gait Analysis Methods to Assess Experience Effects on Lower-limb Mechanics During Moderate High-heeled Jogging and Running. Journal of Visualized Experiments. (127), e55714 (2017).
- Buddhadev, H. H., Barbee, C. E. Redistribution of joint moments and work in older women with and without hallux valgus at two walking speeds. Gait & Posture. 77, 112-117 (2020).
- Yu, P., et al. Morphology-Related Foot Function Analysis: Implications for Jumping and Running. Applied Sciences. 9 (16), 3236 (2019).
- Ridge, S. T., Henley, J., Manal, K., Miller, F., Richards, J. G. Kinematic and kinetic analysis of planned and unplanned gait termination in children. Gait & Posture. 37 (2), 178-182 (2013).
- Burnfield, J. M., Few, C. D., Mohamed, O. S., Perry, J. The influence of walking speed and footwear on plantar pressures in older adults. Clinical Biomechanics. 19 (1), 78-84 (2004).
- Cen, X., Xu, D., Baker, J. S., Gu, Y. Effect of additional body weight on arch index and dynamic plantar pressure distribution during walking and gait termination. PeerJ. 8, 8998 (2020).
- Chatzipapas, C. N., et al. Stress Fractures in Military Men and Bone Quality Related Factors. International Journal of Sports Medicine. 29 (11), 922-926 (2008).
- Cen, X., Xu, D., Baker, J. S., Gu, Y. Association of Arch Stiffness with Plantar Impulse Distribution during Walking, Running, and Gait Termination. International Journal of Environmental Research and Public Health. 17 (6), 2090 (2020).
Réimpressions et Autorisations
Demande d’autorisation pour utiliser le texte ou les figures de cet article JoVE
Demande d’autorisationThis article has been published
Video Coming Soon
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.