
A subscription to JoVE is required to view this content. Sign in or start your free trial.
Method Article
רומן 3D / VR הסביבה אינטראקטיבית לMD סימולציות, ויזואליזציה וניתוח
In This Article
Summary
A new computational system featuring GPU-accelerated molecular dynamics simulation and 3D/VR visualization, analysis and manipulation of nanostructures has been implemented, representing a novel approach to advance materials research and promote innovative investigation and alternative methods to learn about material structures with dimensions invisible to the human eye.
Abstract
ההתפתחות הגוברת של מחשוב (חומרה ותוכנה) בעשורים האחרונים השפיעה מחקר מדעי בתחומים רבים, כולל מדע חומרים, ביולוגיה, כימיה ופיסיקה בין רבים אחרים. מערכת חישובית חדשה להדמיה מדויקת ומהירה והדמיית 3D / VR של ננו מוצגת כאן, באמצעות הקוד הפתוח תוכנת מחשב דינמיקה מולקולרית (MD) LAMMPS. שיטה חישובית חלופה זו משתמשת במעבדים מודרניים גרפיקה, טכנולוגית NVIDIA CUDA וקודים מדעיים מיוחדים כדי להתגבר על מחסומי מהירות עיבוד משותפים לשיטות מחשוב מסורתיות. בשיתוף עם מערכת מציאות מדומה משמשת מודל חומרים, שיפור זה מאפשר תוספת של יכולת הסימולציה MD מואצת. המוטיבציה היא לספק סביבת מחקר חדשנית שבו זמנית מאפשרת הדמיה, סימולציה, דוגמנות וניתוח. מטרת המחקר היא לחקור את המבנה ותכונות של n אורגניanostructures (למשל, nanosprings זכוכית סיליקה) בתנאים שונים באמצעות מערכת חישובית חדשנית זה. העבודה הוצגה מתווה תיאור של מערכת 3D / VR ויזואליזציה ומרכיבים בסיסיים, סקירה של שיקולים חשובים כמו איכות הסביבה הפיסית,, מידע טכני, פרטים על ההתקנה ושימוש במערכת רומן נוהל כללי לשיפור MD המואץ , והערות רלוונטיות. ההשפעה של עבודה זו היא יצירת מערכת חישובית ייחודית המשלבת חומרים ננומטריים סימולציה, הדמיה ואינטראקטיביות בסביבה וירטואלית, שהוא גם מכשיר מחקר והוראה באוניברסיטת קליפורניה במרסד.
Introduction
מדע חומרים הוא שדה בין-תחומי הבוחן את יחסי מבנה-רכוש בעניין ליישום שלהם לתחומים רבים של מדע והנדסה. כיחסי מבנה-רכוש נחקרים באמצעות סימולציות מחשב, בנוסף לניסויים, בכלים חישוביים מציעים תכונות משלימות שיכול לשפר את מאמצי מחקר. בעוד ננו הוא עניין למדענים ויש להם ערך פדיון להשפעה החברתית את הפוטנציאל שלהם, משטר בגודל זה הוא טומן בחובת אתגרים רבים מצאו במיוחד בניסויים.
הדמיות מחשב תאפשר למדענים ומהנדסים כדי לבצע בדיקות מיוחדות במגוון הרחב של הסביבות מוגבלות רק על ידי זמן ומשאבים חישוביים. דינמיקה מולקולרית סימולציות (MD) לאפשר לזמן המתאים ואורך מאזניים ללמוד תופעות של העניין בננו רב. סימולציות להרחיב את המחקר של חומרים על ידי הסרת המגבלות של tהוא מעבדה פיזית, כלים חישוביים אולם רבים חוסר ממשקים נגישים, אינטואיטיבי למחקר. שיפור בתצוגה הגרפית של דגמים, אלגוריתמים חישוביים יעילים, ויחידת עיבוד גרפית מחשוב (GPU) המבוסס להשלים את מאמצי סימולציה הנוכחיות. מכשירי הגרפיקה החדשים אלה משלבים עם יחידות עיבוד מרכזיות ביעילות כדי לאפשר חישובים מתמטיים אינטנסיביים כדי להיות מושלם על ידי GPU. התוצאה היא תאוצה יעילה של חישוב על סדר 10x לוו בירידה בצריכת חשמל של עד 20x.
המטרה של פרויקט מחקר זה הייתה לפתח וליישם כלי חדשני לחקירה הננו שמתחבר ישירות ממשק אינטראקטיבי לסימולציות MD, ניתוח מדע חומרים והדמיית 3D. מערכת חדשנית זו עם יכולות ניתוח ייחודיות ורבות עוצמה כבר בשימוש למחקר בקנה מידה ננומטרי וחינוך באוניברסיטה קליפורניה במרסד, עם השלכות ישירות לrel האחר שדות STEM ated כגון ננוטכנולוגיה, פיסיקה, ביולוגיה, גיאולוגיה ו, ויתרון אולטימטיבי לחינוך וחברה.
מערכת הדמיית 3D / VR יושמה כשני כלי מחקר ובהוראה המאפשר יצירה ומניפולציה של מבנים אטומיים בסביבת מציאות מדומה 3D אינטראקטיבי (VR). המערכת נוצרה מתוך סדרה של בעלויות נמוכות יחסית ורכיבים נגישים הבאות המודל שפותח במקור על ידי ד"ר אוליבר Kreylos בUC Davis 1.
להלן תמונה של פריסת 3D הסופי / מערכת ויזואליזציה VR, עם מרכיבים חשובים שכותרתו (איור 1). מערכת זו הוקמה במקור למטרות חינוך באוניברסיטת קליפורניה במרסד בשנת 2009. יישום 3D המקורי / מערכת VR הביא פרסומי ביקורת עמיתים 2-3. טבלת 1 להלן מסכמת מאפיינים מרכזיים עבור כל רכיב של מערכת הדמיית 3D / VR.
ntent "fo: לשמור-together.within-page =" תמיד ">
1. 3D / מערכת איור VR ויזואליזציה ומרכיביה העיקריים (משמאל) במעבדת מחקר Davila בUCM ומכשירי הדמיה (מימין). אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.
{kind=link}
| פריט | רכיב | פונקציונלי במערכת |
| הטלוויזיה 3D | תצוגת 3D של מבנים מולקולריים דגם ותפריטים על המסך. | |
| B | מצלמות אינפרא אדום (IR) מעקב 4 | מצלמות IR עמדות אחר משקפי הצפייה Wiimote ו3D בסביבת עבודת המשתמשים מול הטלוויזיה 3D, המאפשר virהמניפולציה tual 3D של מבנים מוצג. |
| C | מחשב מעקב | פועל תוכנת מעקב המצלמה IR ומעביר עמדות המשקפיים Wiimote ו3D למחשב דוגמנות. |
| D | Wiimote | המשמש לניהול של תוכנת מודלים שעל המסך ולתפעל מבנים בסביבה וירטואלית 3D. |
| E | משקפי 3D 5 | מסונכרן עם אות הטלוויזיה 3D IR, מאפשר תצוגת 3D של מבנה. עמדה במעקב של מצלמות IR עבור תצוגת 3D מדויקת. |
| F | מחשב דוגמנות | פועל NCK / VRUI 3D דוגמנות ותצוגת תוכנת 6, מקבל אותות המשקפיים / עמדת Wiimote ובקרה ליצירת תצוגת מבנה המולקולרי 3D מדויק. |
פונקציונליות 1. טבלה של מרכיבים העיקריים של המערכת להדמיה 3D / VR בUCM.
Description של מערכת הדמיית 3D / VR ורכיבי יסוד:
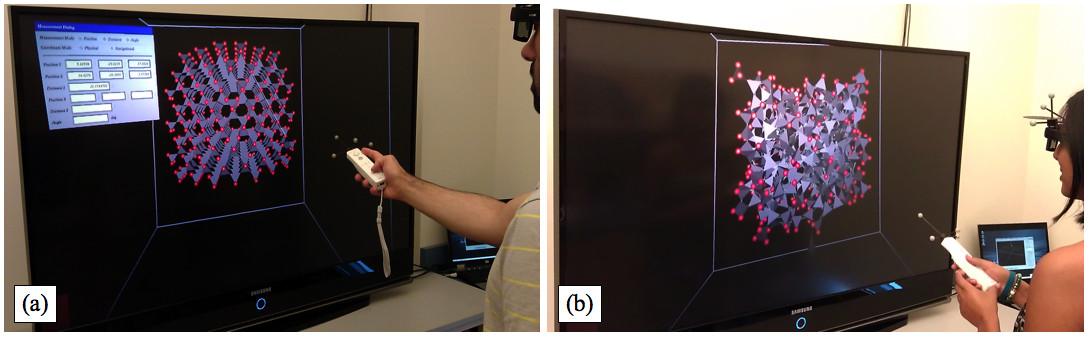
סקירת 3D / VR יזואליזציה מערכת - 3D / מערכת ויזואליזציה VR מורכבת מסדרה של מצלמות IR ותוכנת מעקב הפועל בשיתוף עם תוכנת מודלים 3D כדי לאפשר למשתמש ליצור באופן אינטראקטיבי 3D מבנים מולקולריים. מצלמות IR והתוכנה לעקוב אחר מיקומו של 3D Wiimote ו3D משקפי צפייה באמצעות סמני IR, ולהעביר את זה לתוכנת הדוגמנות. התוכנה משתמשת במודלי אותות בקרת Wiimote ותנועה ליצירת מבנים מולקולריים 3D לצפייה באמצעות השילוב של טלוויזיה בפורמט גדול 3D-מסוגל עם משקפי 3D מסונכרנים ומעקב. התוצאה היא סביבת עבודה של מציאות מדומה 3D בתוך שבו המשתמש יכול דינמי ליצור ולטפל מבנים מולקולריים וירטואליים המשקפים התנהגות פיזית בעולם האמיתי המבוסס על כוחות הבין-אטומיים המשמשים בתוכנת הדוגמנות (איור 2). considerati מיוחדניתן למצוא תוספות להקמת מערכת זו בחומרים משלימים.

איור 2. חקירת ננו סיליקה באמצעות מערכת הדמיית 3D / VR. (א) חוקר יוצר מודל ראשוני cristobalite (גבישים) לפני סימולציות מבוססות GPU. (ב) עם ביצוע הליך להמס-להרוות MD המדומה לדגם שמוצג (א), חוקר אחר משיג מודל זכוכית סיליקה (שאינם גבישי). אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו.
{kind=link}
3D / שיפור מערכת ויזואליזציה VR - יכולת הסימולציה MD:
דינמיקה מולקולרית מערכות סימולציה מיושמות בדרך כלל באופנה רב-קטרי, כלומר, עומס עבודה גדולה מופצת או parallelized בקרב עשרות אלפי מעבדים. לאחרונה, הזדמנויות נוספות למחשוב מדעי מואץ התעוררו מהתפתחויות בעיבוד גרפיקה ממוחשבת. התפתחויות אלה כוללות ממשק תוכנה מאפשר למדענים לנצל את הטבע המקביל מאוד של כוח העיבוד הפנימי לשבבי גרפיקה. עם כניסתו של אדריכלות Compute Unified Device או 7 CUDA, מדענים יכולים להשתמש GPUs 8 כדי לשפר את המהירות שבה בעיות נפתרות תוך הפחתת העלות של תשתית. GPU טיפוסי עשוי להיות שווה הערך של מאות עד אלפי ליבות או "צמתים" לעיבוד מידע, וכמו אלה יכולים כל אחד לשמש במקביל, פתרון מקודד היטב יכול לספק עד 1,000x האצת תפוקה נגד עמיתו רב-הליבה שלה . למרות שלא כל בעיה מתאימה היטב לגישה זו, סימולציות MD הנוכחיות ראו עד 15x ביצועי תפוקה זוכה 9. ניתן למצוא את פרטים על שיפור MD-GPU מערכת הדמיית 3D / VR בחומרים משלימים.
Protocol
1. התקן 3D / VR תוכנת דוגמנות במחשב דוגמנות
- להתקין את מערכת הפעלה בסיס LINUX על מחשב דוגמנות (אובונטו x86 / AMD64 בהתאם לחומרה).
- לשנות את מערכת הפעלה בסיס LINUX.
- התקן ספריות ולהוסיף פונקציונלי בהתאם לצורך.
- התקן VRUI וNCK 3D / תוכנת דוגמנות VR על דוגמנות מחשב 6.
- בדקו אתרי אינטרנט הקשורים 1,6 להשיג גרסות העדכניות ביותר של כל רכיבי תוכנת דוגמנות.
- לקמפל, להגדיר ולבדוק VRUI.
- להתקין ולבדוק NCK.
2. הגדרת מעקב מערכת 1
- הר IR מעקב 4 מצלמות
- ליצור מסגרת השעיה מצלמה נוקשה ישירות מעל הקצה הקדמי של הטלוויזיה 3D ליד התקרה לכיסוי הטוב ביותר. הר 3 מצלמות על mounts מסתובב ישירות מעל הפינות הקדמיות והמרכז מול הטלוויזיה 3D. ודא שזווית הכיסוי של כל מצלמה רק gהורס המשטח הקדמי של הטלוויזיה.
- כוון את המצלמות כדי לקבל את הזווית הרחבה כיסוי (45 מעלות) במקביל לחזית של הטלוויזיה 3D. השתמש בזווית צרה כיסוי (30 מעלות) בניצב לחזית של הטלוויזיה 3D. לאפשר חפיפה מקסימלית במסגרת 3D השטח הרצוי עובד. אובייקטים להבטיח נמצאים בתצוגה של לפחות שתי מצלמות כדי להיות במעקב בהצלחה (איור 3).

איור 3. כיסוי המצלמה IR מעקב על מנת למקסם את סביבת העבודה של 3D מול הטלוויזיה. חלקים () ו- (ב) הראיתי במבט חזיתי וצד עם בגין מערכת הדמיית 3D / VR. אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו .
- להתנסות עם מיקום מצלמה חלופי במידת הצורך כדי ליצור הולםסביבת העבודה 3D. זה עשוי להידרש אם מרחק הרכבת מצלמה האנכי מוגבל.
- התקנה וכיול תוכנת מעקב
- התקן את Toolkit הגוף קשיח OptiTrack במחשב מעקב שימוש במדריך התקנה מצורף.
- סף שנקבע, חשיפה, תאורת הערכים תלויה בסביבה ולהגדיר את האיכות לכידת עד גבוה, כמפורט בהוראות תוכנת מעקב.
- ללכידת שרביט, להיות זהיר כדי להסיר את כל החומר רעיוני האחר מסביבת עבודת 3D. לעבור בצורה חלקה לאורך כל אזור עבודה חפיפה מצלמה עם השרביט רעיוני. חזור על פעולה עד סטנדרטי ואומר שגיאות להלן "0.5" מתקבלים לאחר מכן שמור את קובץ הכיול.
- הגדר את מטוס הקרקע להקמת אזור עבודת 3D מעקב לתאם מוצא מערכת. הגדר את המשקפיים Wiimote ו3D מעקב אובייקטים כמפורט בהוראות תוכנת מעקב.
- שלם VRUI כיול
- הגדר VRUI לקבל trackinמידע g ממחשב מעקב.
- ודא מעקב פונקציונלי בVRUI באמצעות שירות כיול DeviceTest.
- יישר תצוגת VRUI 3D ותוכנת מעקב לתאם מערכות.
- נטייה סט של משקפי Wiimote ו3D מעקב באמצעות תוכנת יישור AlignTrackingMarkers.
{kind=link}
3. להכין מערכת דוגמנות 3D לשימוש
- לפני שיתחיל, להסיר את כל התכשיטים רעיוני (כלומר, שעונים, עגילים, מתכות, וכו '). אל תסירו את משקפי מתקנות צריכים להתמקד על המסך.
- להרכיב את הציוד עבור מערכת הדמיית 3D / VR:
- מחשב דוגמנות
- מחשב מעקב
- 3D-מסוגל בפורמט רחב טלוויזיה
- כבל וידאו בין מחשב דוגמנות וטלוויזיה 3D
- פולט 3D IR לטלביזיה 3D
- כבלי Ethernet עבור מחשבי דוגמנות ומעקב
- Wiimote עם קרני מעקב (בקר)
- משקפי 3D עם קרני מעקב (משקפי 3D) 5
- זהירות במקום בקר שבו ניתן להגיע אליו בקלות מהמחשב של דוגמנות, נזהרים שלא לגעת או להזיז את סמני מעקב כדורי IR קשור אליו.
- זהירות במקום משקפי 3D בעמדת טלוויזיה (כמו קודם, כדי להיות בטוח כדי להימנע ממגע הסמנים רעיוני).
- חבר את שלושת כבלי USB ממצלמות IR רכובים מעל הטלוויזיה 3D עד 3 יציאות USB במחשב המעקב, בזמן שהוא כבוי.
- אתר את השלט רחוק הטלוויזיה 3D ולמקם אותו מול הטלוויזיה 3D.
- חבר את כבל וידאו לכרטיס מסך במחשב הדוגמנות וכניסת וידאו של הטלוויזיה 3D. גם לחבר את פולט 3D IR עבור פלט סנכרון 3D מהטלוויזיה 3D, ולמקם את הפולט בטלוויזיה עומד צד קרוב של טלוויזיה, המצביע לעבר שבו המשקפים יהיו בשימוש. להיזהר מאוד שלא להעביר את עמדתה של הטלוויזיה מכוילת.
- הפעל הטלוויזיה 3D ON, לפני ההפעלה במחשב הדוגמנות לenהכרה ראויה בטוחה על ידי המחשב.
- הפעל את המחשב דוגמנות. לאחר אתחול מחשב דוגמנות לפקודת התחברות, להתחבר למערכת LINUX מחשב הדוגמנות לחשבון מתאים.
- ברגע ששולחן העבודה של מחשב הדוגמנות היא זמינה, להשתמש בשלט הרחוק הטלוויזיה 3D כדי לבדוק את המצב של חיבור כבל וידאו על ידי לחיצה על "/ מידע i" הכפתור. ודא שתצוגת מסך טלוויזיה "60Hz @ 1920x1080" בפינה השמאלית העליונה. אם לא, לאתחל את מחשב הדוגמנות להקים הכרה נכונה של הטלוויזיה 3D. כמו כן הקפד טלוויזיה היא בתפוקת מצב 3D 2, באמצעות תפריטי הגדרת השלט הרחוק.
- על שולחן העבודה של מחשב הדוגמנות, לפתוח חלון מסוף עם כמה לשוניות.
- במחשב המעקב, לאמת את כתובת ה- IP של מתאם Ethernet על ידי הקלדה "ipconfig" בחלון פקודה.
- במחשב הדוגמנות, לפתוח חלון כרטיסיית מסוף ולבדוק בתוך קובץ VRDevices.cfg שמגדיר מיהו "ServerName"כתובת ה- IP של מתאם Ethernet מחשב מעקב.
- במידת צורך, לשנות את כתובת ה- IP "ServerName" בVRDevices.cfg כדי להתאים את מתאם ה- Ethernet מחשב מעקב, ולשמור VRDevices.cfg.
- במחשב המעקב, ליזום תוכנת כלי גוף קשיח OptiTrack.
- לאפשר לתוכנה כדי לפתוח לחלוטין, לאחר מכן לחץ על לחצן הגדול ליד התפריט העליון שכותרתו "תוצאת כיול טען".
- חפש וללפתוח את קובץ כיול המצלמה המתאים.
- לאחר שהקובץ נטען, לחץ על תפריט "הקובץ" ובחר באפשרות "הגדרות גוף נוקשה טען".
- חפש וללפתוח את קובץ הגדרת גוף הנוקשה המתאים עבור בקר במעקב ומשקפי 3D.
- בחלונית הימנית של תוכנת המעקב, איתור הסעיף שכותרתו "הזרמת", להרחיב את הסעיף ותחת הקטגוריה "VRPN הזרמת", ודא שמספר היציאה הרשום הוא 3883, ולאחר מכן לבדוק "Broadלהטיל "תיבה בתוך" נתוני מסגרת הקטגוריה VRPN הזרמת המנוע ".
- במחשב הדוגמנות, לוודא כי הבקר הוא באופן ישיר ביד או באופן מיידי לגישה (2 שניות משם לכל היותר).
- במחשב הדוגמנות, להעלות את כרטיסייה בחלון המסוף יצר קודם לכן בפגישה זו ולנווט וללאחר מכן ליזום את תוכנת VRDeviceDaemon, למשל, הקלדה "./VRDeviceDaemon".
- בצע את הפקודה לאם הפעילות הייתה מוצלחת, החלון כעת להציג "כפתורים לחצו על 1 & 2 על Wiimote בו זמנית." "VRDeviceServer: ממתין לחיבור הלקוח".
4. מערכת הדמית המבחן 3D / VR שימוש בתוכנת NCK
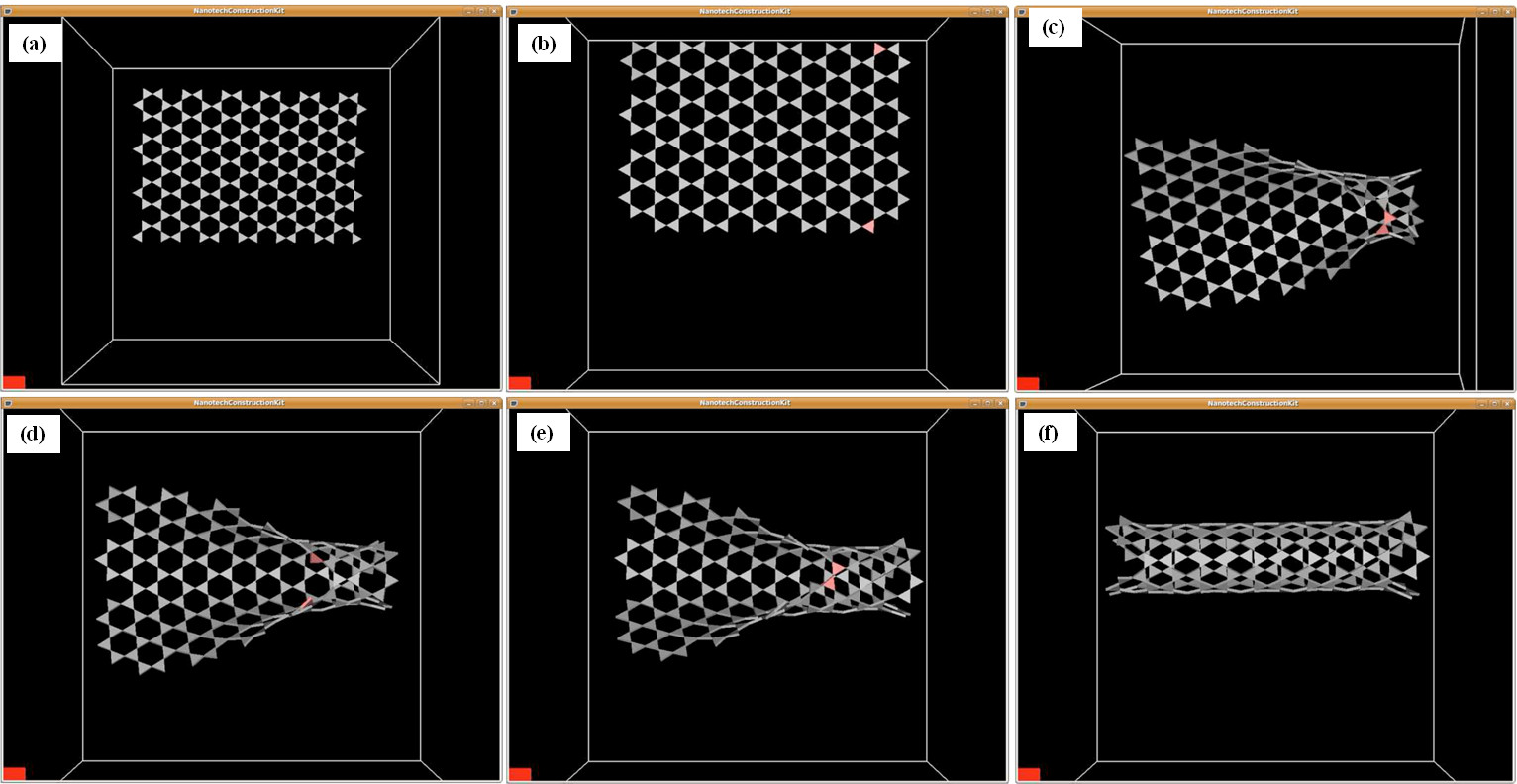
הסט של הוראות הבאות מתאר את אופן שימוש בתפריטים על מסך תוכנת NCK להקים פונקציות כלי בקר, ולאחר מכן כיצד לבנות ולתפעל nanotu פחמןלהיות בסביבת עבודת 3D / VR מאטומים המרכיבים את פחמן (איור 4). הוראות כיצד למדוד את זוויות קשר וכתוצאה מכך ומרחקים (שלב 4.4.10) זמינות באופן מקוון 10.

איור 4. סטודנט לתואר ראשון באמצעות מערכת 3D / VR יזואליזציה ללמוד צינורות פחמן (CNTs) תמונות () -.. (F) להראות את תהליך הבנייה של אחת החומה CNT אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו .
{kind=link}
- בתוך חלון מסוף מחשב הדוגמנות יצר בשלב 3.11, בחר בכרטיסייה השלישית. ליזום תוכנת NCK, לנווט לספריית התקנת NCK וסוג:
"./NanotechConstructionKit -rootSection localhost -domainsize 36 ". - להיות זהירים מאוד שלא לגעת או לשחרר את סמני מעקב הצמודים, לשים על משקפי 3D ולהרים את הבקר. להתאים את מצב צפייה הראש / המשקפיים כדי להבטיח משקפי 3D מקבלים הטלוויזיה 3D IR פולט אות סנכרון, המאפשר צפייה 3D / VR של תצוגת טלוויזיה.
- על מנת לקבל כלים כדי להוסיף, להעביר ולמחוק אטומים, להקצות עמותות פקודת NCK לכפתורים בבקר כדלקמן:
- להעלות את תפריט NCK הראשי על מסך על ידי הלחיצה והחזקה של כפתור הבית בWiimote, ניווט ולבחירת פריט התפריט "בטל כלים", ולאחר מכן לשחרר את לחצן הבית. זה מאפשר הקצאה של פקודות לכפתורים שונים בבקר בנפרד זו מזו.
- כדי לשייך את כפתור הדק Wiimote (בחלק התחתון של הבקר) עם הפעולה של מניפולציה של אטומים בתוך NCK, לחץ והחזק את כפתור ההדק, לנווט בתפריטי NCK על המסך אל & #8220; גרר "ובחר" 6 DOF גרר, "לאחר מכן שחררו את ההדק. ההדק משויך כעת לפעולה של מניפולציה אטומים.
- כדי להקצות את הפונקציה של הוספת אטום לכפתור "+" על Wiimote, להביא את התפריט הראשי על ידי לחיצה והחזקה של כפתור הבית, לנווט ל" סוגים מבניים יחידה ", ובחר" משולש ", ולאחר מכן שחרר את לחצן דף הבית .
- לחץ על הבא והחזק את הכפתור "+", לנווט ל" גרר ", ובחר" 6 DOF גרר, "לאחר מכן שחרר את הכפתור" + ". הכפתור "+" משויך כעת ליצירת האטומים חדשים מהסוג שנבחר (אטומי פחמן מיוצגים על ידי משולשים, במקרה זה).
- כדי להקצות את הפונקציה של מחיקת אטום ל" - "הכפתור על Wiimote, להעלות את התפריט הראשי על ידי לחיצה והחזקה של הכפתור" הבית ", ולאחר מכן נווט ל" סוגי יחידה מבניים," ובחר & #8220; מחק יחידות נבחרות, "לאחר מכן שחרר את כפתור הבית.
- בשלב הבא, לחץ לחיצה ארוכה על כפתור -, לנווט ל" גרר "ואז" 6 DOF גרר, "ושחרר את" "- לחצן" ". "-" הכפתור משויך כעת לאטומי מחיקה.
- בצע הליך דומה ללהקצות פונקציות של "נעילת יחידות נבחרות" לכפתור "1" Wiimote, ו" לפתוח יחידות נבחרות "ללחצן" 2 "בקר.
- ברגע שכפתורי הבקר הוגדרו, ליצור ננו-צינורות פחמן באמצעות NCK כדלקמן:
- שימוש בלחצן "+", מוסיף שתי אטומים פחמן משולש 3-בונד לסביבת עבודת NCK. מניפולציות באמצעות אלה על כפתור ההדק עד שהם יצטרפו בקודקוד.
- הוסף 4 יותר אטומים פחמן כדי ליצור צורת כוכב משושה.
- שימוש בתפריט "הבית", לנווט ל" I / O תפריט ", ואז" יחידות שמור.
- הזז את המבנה מחודד 6 מהמיקום הנוכחי שלה.
- שימוש בתפריט "הבית", לנווט ל" I / O תפריט ", ואז" יחידות טען.
- חזור על 2 השלבים האחרונים עד גיליון 6 על ידי 6 טבעות 6-אטום משושה נוצר (איור 5 א).
- שימוש בלחצן "1", לנעול אטום אחד בשורה העליונה, ואטום יריב בשורה התחתונה. אטומים הנעולים יסומנו בצבע ורוד (איור 5).
- שימוש בלחצן ההדק, להעביר בזהירות אחד מהאטומים הנעולים בקשת מעגלית עד הקודקוד שלה בחינם מתקרב לקודקוד החופשי של האטום נעול המנוגדים. קו ירוק יופיע בין הקודקודים כאשר הם קרובים מספיק שמשיכה אטומית תגרום להם להצטרף לעם קשר (איור 5 ג). ברגע שהצלחה הצטרפה, לפתוח שני אטומים באמצעות לחצן "2".
- תמשיך באופן דומה נעילה, שהצטרף, וביטול נעילה מנוגדים Ver האטומיtices בגיליון פחמן, בצורה יעילה "רוכס" גיליון ל- צינורות פחמן סופיים (איורים 5D-5F).

5. יצירת צעד חכם דמותו של יחיד מוקף חומה CNT מראה 6 x 6 גיליון (גרפן) של טבעות פחמן משושה, (ב) התנגדות לאטומי פחמן () "נעול" (המוצג כמשולשים ורודים), כדי לאפשר מניפולציה קלה יותר נגד כוחות interatomic מציאותיים, (C) פחמן גיליון (גרפן) מעוקל בזהירות כדי לאפשר מליטה בין האטומים בצדדים מנוגדים, (ד) שתי אטומי פחמן המתנגד נוסף נעול לסייע עקמומיות גיליון פחמן נוספת, (E) אטומי פחמן המתנגד נוסף ערובה להמשיך פחמן עקמומיות גיליון לתוך ננו-צינורות, וCNT הסופי (F) נוצרה לאחר מליטה רציפה של אטומים מנוגדים של ג המקוריגיליון ארבון (גרפן). אנא לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו. - כאשר ננו-הצינורות הושלם, השתמש בכלי מדידה המופיע על מסך כדי לאשר זוויות ומרחקי 10 מבניות.
{kind=link}
5. ויזואליזציה של מודלי סימולציה דינמיקה המולקולרית
- לייבא מודל דמוי קובייה ראשונית SiO גבישים 2 לתוכנת 3D / VR NCK, ולחקור את המבנה הראשוני (ראה איור 2 א).
- תוכניות קוד פתוח MDCASK 11 וLAMMPS 12 הותקפו בגלל תכונות שמתאימות היטב למוקד מחקר זה. התכנית האחרונה משמשת בעבודה זו ניתנה הפוטנציאלים שלה המגוונים interatomic ויכולת מחשוב GPU. שימוש בחבילת LAMMPS MD 12, לרוץ להמיס מדומה / להרוות הליך על מבנה ראשוני זה כדי לייצר SiO 2 st אמורפי ructure. ניתן למצוא את פרטים על הליך מדומה זה בפרסומים קודמים 13-15.
- לייבא SiO 2 מודל כתוצאה החדש אמורפי (סדר) לתוך תוכנת 3D / VR NCK ולחקור את המבנה (ראה איור 2).
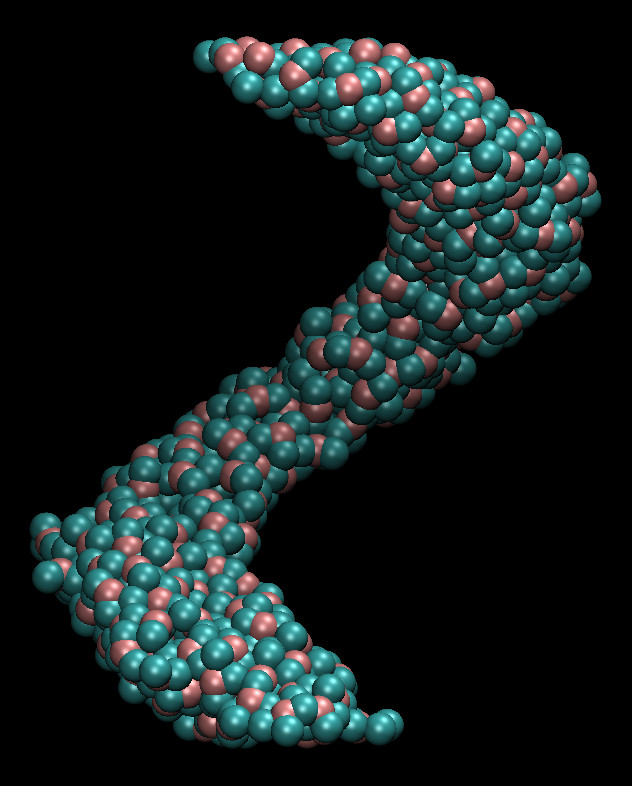
- צור SiO 2 nanospring / nanoribbon מתוך NanospringCarver החדש אמורפי המוצק באמצעות הקוד הפתוח קוד 16 וההוראה הקשורים תיעוד 17 (איור 6).

איור איור 6. של תהליך בחירת אטום צעד-אחר-צעד, בשלבים שונים ביצירת nanospring באמצעות תכנית NanospringCarver חלקים. (- D) מצביע על 25%, 50%, 75% ו -100% השלמתו של תהליך זה 17.target = "_ blank"> לחץ כאן כדי לצפות בגרסה גדולה יותר של דמות זו. - השתמש בחבילת LAMMPS MD לבצע סימולציות מתיחה על nanospring / nanoribbon (איור 7). ניתן למצוא את פרטים על הליך זה בפרסום קודם 15.

איור 7. תמונת Snapshot מתוצאות ננו-מבנה סליל סיליקה LAMMPS MD סימולציה (nanoribbon) מתיחה. - השתמש בקוד הפתוח כלי תוכנת VMD (הדינמיקה מולקולרית דמיינו) 18 ImageMagick 19, וFFmpeg 20 כדי ליצור תמונות ואנימציה של ננו-מבנה הסליל בכל סימולציה זו (אנימציה איור 1), להצגה במערכת הדמיית 3D / VR. אנא לחץ כאן כדי להציג v גדולersion של נתון זה.
{kind=link}
אנימציה איור 1. אנימציה של סימולציה המתיחה ננו-מבנה סליל.
תוצאות
זה 3D / מערכת ויזואליזציה VR מציגה הזדמנויות חדשות לביצוע מחקרי מדע חומרים. כסביבת immersive זה פועלת בזמן אמת, בצורה של קלט 3D ותצוגה, החוקר מוצג עם מכשיר nanoscaled אינטראקטיבי מלא 2. על ידי ביצוע הפרוטוקול המובא כאן, nanoribbon סליל סיליקה נוצרה באופנת צעד-אחר-צעד זה. תמונת מצב ש...
Discussion
אלמנטים קריטיים בהתקנה והשימוש המוצלחות של מערכת הדמיית 3D / VR מפורטים בסביבה הפיזית ושיקולי עיצוב ושיקולים מיוחדים בחומרים משלימים. שיקולי התקנה חשובים לכלול גובה תצוגת 3D עבור מעמד לטווח ארוך נוח או שימוש יושב, מוגדל מעקב גובה מצלמה מותקנת כדי ליצור שטח גדו...
Disclosures
המחברים מצהירים שאין להם אינטרסים כלכליים מתחרים.
Acknowledgements
We wish to gratefully acknowledge the original inspiration and extensive support provided to us toward the creation of this system from Dr. Oliver Kreylos of the UC Davis Institute for Data Analysis and Visualization. His advice and assistance were instrumental to our success.
We also wish to thank the NSF BRIGE program for providing funding for this project. This material is based upon work supported by the National Science Foundation under Grant No. 1032653.
Materials
| Name | Company | Catalog Number | Comments |
| Samsung 61" 3D-capable high definition DLP TV | Samsung | http://www.samsung.com/us/video/tvs | See Protocol Section 3 (Step 3.2) (Large format 3D-capable TV) |
| Alienware Area51 750i modeling computer | Alienware | http://www.alienware.com | See Protocol Section 1 (Step 1.1) (Modeling computer) |
| HP EliteBook 8530w tracking computer | HP | http://www.hp.com | See Protocol Section 2 (Step 2.3) (Tracking computer) |
| V100:R2 IR tracking cameras (3) | Naturalpoint | http://www.naturalpoint.com/optitrack/products/v100-r2/ | See Protocol Section 2 (Step 2.1) and Reference [4] (Tracking cameras) |
| OptiTrack Tracking Tools IR tracking software | Naturalpoint | http://www.naturalpoint.com/optitrack/software/ | See Protocol Section 2 (Step 2.3) and Reference [4] (Tracking software) |
| 3D Goggles and 3D TV IR sync emitter | Ilixco | http://www.i-glassesstore.com/dlp3d-wireless-2set.html | See Protocol Section 3 (Step 3.2) and Reference [5] (3D goggles) |
| Wiimote 3D controller | Nintendo | http://www.nintendo.com/wii | See Protocol Section 3 (Step 3.2) (Wiimote) |
| VRUI, NCK and associated 3D/VR modeling software | Open source software | http://idav.ucdavis.edu/~okreylos/ResDev/NanoTech/index.html | See Protocol Section 1 (Step 1.3) and References [1,6] (VRUI, NCK) |
| LAMMPS molecular dynamics software | Open source software | http://lammps.sandia.gov/ | See Protocol Section 5 (Step 5.2) and Reference [12] (LAMMPS) |
| NanospringCarver program code and files | UC Merced - open source | http://tinyurl.com/qame8dj | See Protocol Section 5 (Step 5.4) and References [16-17] (NanospringCarver) |
| MATLAB GUI files | UC Merced - open source | http://tinyurl.com/qame8dj | See Protocol Section 5 (Step 5.4) and References [16-17] (NanospringCarver) |
| Atomistic bulk glass input file | UC Merced - open source | http://tinyurl.com/qame8dj | See Protocol Section 5 (Step 5.4) and References [16-17] (NanospringCarver) |
References
- Doblack, B. N., Flores, C., Matlock, T., Dávila, L. P. The emergence of immersive low-cost 3D virtual reality environments for interactive learning in materials science and engineering. Mater. Res. Soc. Symp. Proc. 1320, (2011).
- Flores, C., Matlock, T., Dávila, L. P. Enhancing materials research through innovative 3D environments and interactive manuals for data visualization and analysis. Mater. Res. Soc. Symp. Proc. 1472, (2012).
- . 3D goggle source. , (2013).
- . “3D/VR Visualization System - Startup and Shutdown Protocol” and “3D/VR Visualization System – CNT Modeling Example” documents Available from: https://eng.ucmerced.edu/people/ldavila/home/3d-vr-visualization-system-dissemination-of-research-results-and-products (2013)
- . MDCASK molecular dynamics code Available from: https://asc.llnl.gov/computing_resources/purple/archive/benchmarks/mdcask (2013)
- Feuston, B. P., Garofalini, S. H. Empirical three-body potential for vitreous silica. J. Chem. Phys. 89 (9), 5818-5824 (1988).
- Dávila, L. P., et al. Transformations in the medium-range order of fused silica under high pressure. Phys. Rev. Lett. 91 (20), 2055011-2055014 (2003).
- Doblack, B. N. . The structure and properties of silica glass nanostructures using novel computational systems. , (2013).
- Meagher, K. A., Doblack, B. N., Ramirez, M., Dávila, L. P. Scalable nanohelices for predictive studies and enhanced 3D visualization. J. Vis. Exp. In-Press, .
- . University of California Television (UCTV). Our Digital Life series: The Future: Teaching and Life-Saving Tools episode. , (2013).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved