
このコンテンツを視聴するには、JoVE 購読が必要です。 サインイン又は無料トライアルを申し込む。
Method Article
MDシミュレーションのための新しい3D / VRインタラクティブな環境、可視化と分析
要約
A new computational system featuring GPU-accelerated molecular dynamics simulation and 3D/VR visualization, analysis and manipulation of nanostructures has been implemented, representing a novel approach to advance materials research and promote innovative investigation and alternative methods to learn about material structures with dimensions invisible to the human eye.
要約
最後の数十年でコンピューティング(ハードウェアおよびソフトウェア)の増加開発は、他の多くの間、材料科学、生物学、化学、物理学など、多くの分野での科学的研究に影響を与えた。正確かつ高速シミュレーションおよびナノ構造の3D / VR可視化のための新たな計算システムは、分子動力学(MD)コンピュータプログラムは、LAMMPSオープンソースを使用して、ここに提示されている。この代替計算方法は、従来のコンピューティング方法に共通処理速度の障壁を克服するために近代的なグラフィックス·プロセッサ、NVIDIA CUDAテクノロジ、専門科学的なコードを使用しています。材料をモデル化するために使用される仮想現実システムと組み合わせて、この拡張を加速MDシミュレーション機能の追加を可能にする。動機は、同時に視覚化、シミュレーション、モデリングおよび分析を可能にする新規な研究環境を提供することにある。研究目標は、無機、nの構造と性質を調査することであるこの革新的な計算システムを用いて、異なる条件の下でanostructures( 例えば、シリカガラスナノスプリング)。提示作品は、3D / VR可視化システムと基本的な構成要素の説明、そのような物理的環境などの重要な検討事項の概要は、小説のシステムのセットアップと使用の詳細については、加速のMD強化するための一般的な手順、技術的な情報の概要を説明、および関連する発言。この作品の影響は、UCマーセドでの研究と教育の楽器でもある仮想環境でのナノスケール材料シミュレーション、可視化とインタラクティビティを組み合わせたユニークな計算システム、の作成です。
概要
材料科学は、科学や工学の多くの分野への応用のための問題で構造 - 特性の関係を調べ、学際的な分野である。構造 - 特性関係は実験に加えて、計算機シミュレーションにより検討した結果、計算ツールは、研究活動を強化することができる補完的な機能を提供します。ナノ材料科学者に関心のものであり、その潜在的な社会的影響のための欠点を補う価値がありますが、このサイズの体制は、特に実験で見つかった多くの課題をはらんでいる。
コンピュータシミュレーションは、科学者やエンジニアが唯一の時間と計算リソースによって制限された環境の多種多様な専門的なテストを実行することができます。分子動力学(MD)シミュレーションは、適切な時間と長さは、多くのナノ材料への関心の現象を研究するためにスケールできるように。シミュレーションは、tの制約を除去することにより、材料の研究を拡大する彼は、しかし、多くの計算ツールは、研究のためにアクセス可能な、直感的なインターフェイスを物理研究室が不足している。モデルのグラフィック表示、効率的な計算アルゴリズム、およびグラフィカル処理ユニット(GPU)ベースのコンピューティングとの増強は、現在のシミュレーションの取り組みを補完する。これらの新しいグラフィックスデバイスは、数学的に集中的な計算がGPUによって達成することができるように、効率的に、中央処理ユニットと組み合わせる。結果は、最大20倍の消費電力の低減を伴う、10倍程度の計算の有効な加速度である。
この研究プロジェクトの目標は、直接MDシミュレーション、材料科学解析と3Dビジュアライゼーションに対話型インタフェースを接続しているナノサイエンスの調査のための新規のツールを開発し、実施することでした。独自の強力な分析機能を備えたこの革新的なシステムは、他のRELに直接影響し、UCマーセドでナノスケールの研究や教育のために使用されてきたそのようなナノテクノロジー、物理学、生物学、地質学、教育や社会への最終的な利益としてated STEM分野。
3D / VR可視化システムは、インタラクティブな3Dバーチャルリアリティ(VR)環境での原子構造の作成および操作を可能にする研究と教育楽器の両方として実装されました。このシステムはもともとUCデービス1博士オリバーKreylosによって開発されたモデル以下の比較的低コストでアクセス可能なコンポーネントのセットから作成されました。
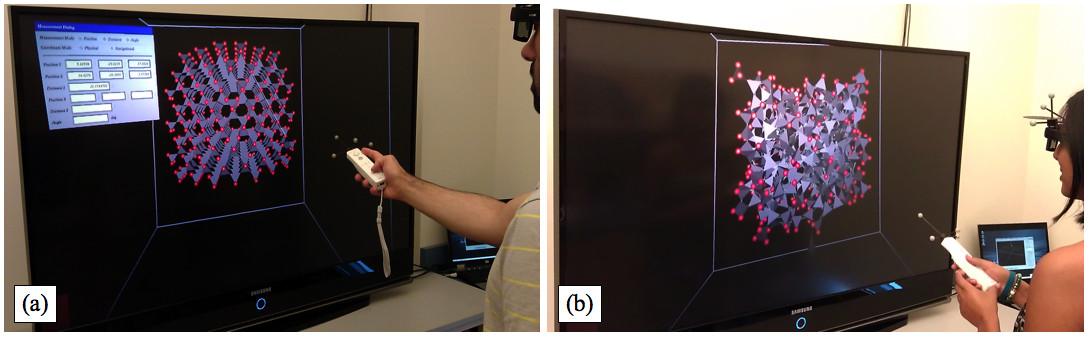
以下は、( 図1)ラベルの重要なコンポーネントで、最終的な3D / VR可視化システムのレイアウトの写真です。このシステムは、もともと2009年にオリジナルの3D / VRシステムの実装はピアレビュー出版物2-3の結果UCマーセドの教育目的のために設立されました。以下の表1は、3D / VR可視化システムの各要素のキーの特性をまとめたものである。
ntent「FO:キープtogether.withinページ= "常に">
図1. 3D / VR可視化システムと主要コンポーネント(左)ダビラ研究所でUCMでの可視化デバイス(右)。 この図の拡大版をご覧になるにはこちらをクリックしてください。
{kind=link}
| アイテム | コンポーネント | システムでの機能 |
| A | 立体テレビ | モデル化された分子構造の3Dディスプレイとオンスクリーンメニュー。 |
| B | 赤外線(IR)追跡カメラ4 | IRカメラ3Dテレビの前でユーザーのワークスペースでWiiリモコンと3D表示ゴーグルのトラック位置、許可VIR表示された構造物のトゥアル3D操作。 |
| ℃ | トラッキングPC | IRカメラトラッキングソフトウェアを実行し、モデル化、コンピュータにWiiリモコンや3Dゴーグル位置を伝送する。 |
| D | Wiiリモコン | モデリングソフトウェアの画面上の管理に使用されると、3D仮想環境内の構造を操作する。 |
| E | 3Dゴーグル5 | 3DテレビIR信号と同期、構造の3Dビューを可能にします。正確な3Dビュー用の赤外線カメラによって追跡位置。 |
| F | モデルPC | ランNCK / VRUI 3Dモデリングと表示ソフトウェア6、正確な3D分子構造ビューを作成するためにゴーグル/ Wiiリモコンの位置と制御信号を受け入れます。 |
UCMでの3D / VR可視化システムの主要な要素の表1.機能。
Descriptio3D / VR可視化システムと基本コンポーネントのN:
3D / VR可視化システムの概要 - 3D / VR可視化システムは、IRカメラのセットで構成され、ユーザがインタラクティブに3D分子構造を作成できるようにモデラーと組み合わせて動作するソフトウェアを追跡する。 IRカメラおよびソフトウェアは、IRマーカーを使用してWiiリモコンや3Dビューイングゴーグルの3D位置を追跡し、モデリングソフトウェアにこれを渡す。モデリングソフトウェアは、同期化され、追跡された3Dメガネと3D対応大型テレビの組み合わせを使用して表示可能な3次元分子構造を生成するためにWiiリモコン制御信号と動きを使用する。これは、ユーザーが動的にモデリングソフトウェア( 図2)で使用される原子間力に基づいて現実世界の物理的挙動を反映した仮想分子構造を作成し、操作することができ、その中の3Dバーチャルリアリティのワークスペースになり。特別consideratiこのシステムを設定するためのアドオンは、補足資料に見出すことができる。

3D / VR可視化システムを使用したシリカナノ材料の調査2.図 。 (a)の研究者は、GPUベースのシミュレーション前の初期クリストバライトモデル(結晶)を作成します。 (B)(A)に示したモデルでシミュレートされたMDは、溶融急冷を手順を実行する際に、別の研究者は、シリカガラスモデル(非結晶)を取得する。 この図の拡大版をご覧になるにはこちらをクリックしてください。
{kind=link}
3D / VR可視化システムの強化-のMDシミュレーション能力:
シミュレーションシステムは、一般的に実装されている分子動力学マルチ結節ファッションは、つまり、大規模なワークロードは、プロセッサの数千に数万の間に分散または並列化されている。最近では、加速された科学的なコンピューティングのための追加の機会は、コンピュータグラフィックス処理の発展から生じている。これらの進歩は、科学者は、グラフィックスチップに固有の処理能力の高度並列性を利用することを可能にするソフトウェア·インタフェースを含む。計算統合デバイスアーキテクチャまたはCUDA 7の登場により、科学者は、インフラストラクチャのコストを低減しつつ、問題が解決される速度を高めるためのGPU 8を使用することができる。典型的なGPUは、情報を処理するためのコアまたは「ノード」の数百から数千に相当するものを有してもよく、これらとして並列に使用することができ、十分に符号化されたソリューションは、マルチコア対応物に対するスループット加速度を1,000倍まで提供することができる。すべての問題は、このアプローチによく適していないが、現在のMDシミュレーションを15にまで見てきたxはスループット性能は9を得る 。 3D / VR可視化システムMD-GPUの強化の詳細は補足資料に記載されています。
プロトコル
1.モデルPC上で3D / VRモデリングソフトウェアをインストールする
- モデリングPC(ハードウェアに依存するのUbuntuのx86 / AMD64)上のLinuxベースのオペレーティングシステムをインストールします。
- Linuxベースのオペレーティング·システムを変更します。
- ライブラリをインストールし、必要に応じて機能を追加。
- VRUIとモデリングPC 6上のNCK 3D / VRモデリングソフトウェアをインストールします。
- すべてのモデリング·ソフトウェア·コンポーネントの最新バージョンを入手するために関連のウェブサイト1,6をチェックしてください。
- 、コンパイル設定およびVRUIをテストします。
- NCKをインストールしてテストします。
2.セットアップ追跡システム1
- マウントIRトラッキングカメラ4
- 最高の取材のために天井近くに3Dテレビの前縁部の真上にリジッドカメラサスペンションフレームを作成します。直接フロントコーナーや3Dテレビの前面中央上記スイベルマウントにマウント3台のカメラ。各カメラのカバー角度がちょうどグラムことを確認してくださいTVの前面をrazes。
- 3Dテレビの前に広いカバー角度(45度)パラレルを持つようにカメラを向けます。 3Dテレビの前に垂直に狭いカバー角度(30度)を使用します。希望3D作業空間内の最大オーバーラップを可能にします。確実にオブジェクトが正常に追跡される少なくとも二つのカメラ( 図3)を考慮している。

図3. IR追跡カメラカバレッジはテレビの前で3Dワークスペースを最大限にする。パート(A)と(B)は、3D / VR可視化システムの尊重と正面と側面図を示している。 この図の拡大版を表示するには、こちらをクリックしてください。
- 十分なを作成するために必要な場合には、代替カメラ配置で実験3Dワークスペース。垂直カメラ取付距離が制限されている場合、これは必要とされ得る。
- インストールし、校正トラッキングソフトウェア
- 付属のインストールマニュアルを使用して追跡コンピュータ上のOptiTrack剛体Toolkitをインストールします。
- 設定されたしきい値、露出、照明は環境に依存値とトラッキングソフトウェア命令で詳述するように、ハイにキャプチャ品質を設定。
- ワンドキャプチャ用、3Dワークスペースからすべての他の反射材料を除去するように注意してください。反射杖でカメラの重複作業領域全体でスムーズに移動します。標準になるまで繰り返し、「0.5」以下のエラーを意味した後、キャリブレーションファイルを保存得られる。
- 座標系の原点追跡3D作業領域を確立するために、接地面を設定する。 Wiiリモコンや3Dゴーグルを定義し、追跡ソフトウェア命令に詳述されたオブジェクトを追跡した。
- VRUIキャリブレーションを完了します
- TRACKINを受け入れるVRUIを設定トラッキング·コンピュータからのG情報。
- DeviceTestキャリブレーションユーティリティを使用してVRUIトラッキング機能を確認する。
- VRUI 3D表示と追跡ソフトウェアは、座標系を合わせます。
- AlignTrackingMarkersアラインメントソフトウェアを使用して追跡Wiiリモコンや3Dゴーグルのセット向き。
{kind=link}
3.使用するための3次元モデリングシステムの準備
- 開始する前に、すべての反射ジュエリー( すなわち、時計、イヤリング、金属など ) を除去する。画面に集中するために必要な矯正眼鏡を削除しないでください。
- 3D / VR可視化システムのための機器を組み立てます。
- モデルコンピュータ
- トラッキングコンピュータ
- 大判の3D対応テレビ
- モデリングコンピュータと3Dテレビの間にビデオケーブル
- 3Dテレビ用の3D IRエミッター
- モデリングと追跡コンピュータ用のイーサネットケーブル
- 追跡枝角とWiiリモコン(コントローラ)
- 追跡枝角を持つ3Dゴーグル(3Dゴーグル)5
- 慎重に触れたり、それに添付球状IR追跡マーカーを移動しないように注意しながら、モデリングコンピュータから簡単にアクセスできコントローラーを配置。
- 慎重に(以前のように、反射マーカーに触れないようにしてください)テレビ台に3Dゴーグルを置く。
- それがOFFの電源が入っている状態で、トラッキング·コンピュータ上の3つのUSBポートへの3Dテレビの上に取り付けられた赤外線カメラから3つのUSBケーブルを接続します。
- 3Dテレビのリモコンの位置を確認し、3Dテレビの前に置きます。
- モデリングコンピュータのビデオカードと3Dテレビのビデオ入力にビデオケーブルを接続します。また、3Dテレビから3D同期出力のための3D IRエミッタを接続し、テレビの側に近いテレビ台にエミッターを配置し、ゴーグルを使用される場所に向かって指している。校正され、テレビの位置を移動しないように十分注意してください。
- ENにモデリングコンピュータの電源を入れる前に、3Dテレビの電源をオンにしますコンピュータによる確認して適切な認識。
- モデリングコンピュータの電源を入れます。ログインプロンプトにモデリングコンピュータの起動後、適切なアカウントにモデリングコンピュータLinuxシステムにログイン。
- モデリングコンピュータのデスクトップが利用可能になると、「情報/ i」ボタンを押して、ビデオケーブル接続の状態をチェックするために、3Dテレビのリモコンを使用しています。左上隅にテレビ画面が表示され、「1920×1080する@ 60Hzの」ことを確認してください。そうでない場合は、3Dテレビの正しい認識を確立するために、モデリング、コンピュータを再起動します。また、テレビのリモコンのセットアップメニューを使用して、3D出力モード2であることを確認してください。
- モデリングコンピュータのデスクトップで、複数のタブでターミナル·ウィンドウを開きます。
- トラッキング·コンピュータで、コマンドウィンドウで「IPCONFIG」と入力してイーサネットアダプタのIPアドレスを確認します。
- モデリングコンピュータで、ターミナルウィンドウのタブを開き、「たserverName」を定義し、そのファイルVRDevices.cfg以内に確認してください追跡コンピュータイーサネットアダプタのIPアドレス。
- 必要に応じて、トラッキング·コンピュータイーサネットアダプタに合わせてVRDevices.cfgの「たserverName」のIPアドレスを変更し、VRDevices.cfgを保存します。
- トラッキング·コンピュータで、のOptiTrack剛体ツールソフトウェアを開始する。
- ソフトウェアが完全に開くことができ、その後の「ロードキャリブレーション結果」と表示されトップメニュー近くの大きなボタンをクリックしてください。
- を参照し、適切なカメラキャリブレーションファイルを開きます。
- ファイルがロードされた後、「ファイル」メニューをクリックし、「剛体定義をロード」を選択します。
- を参照し、追跡コントローラや3Dゴーグルのための適切な剛体定義ファイルを開きます。
- 追跡ソフトウェアの一番右のペインで、「ストリーミング」というセクションを探し、「ブロードを確認した後、リストされたポート番号が3883であることを確認、および「VRPNストリーミング」カテゴリの下を拡張VRPN Streaming Engineの「カテゴリ」の中にボックス」のフレームデータをキャスト。
- モデリングコンピュータでは、コントローラが直接手に、または(2秒離れて、最大で)すぐに到達可能ないずれかであることを確認してください。
- モデリングコンピュータで、以前このセッションで作成するターミナルウィンドウにタブを起動し、に移動し、「./VRDeviceDaemon "と入力し 、例えば 、VRDeviceDaemonソフトウェアを開始する。
- アクティビティが成功した場合は、「。同時にWiiリモコンのボタンを押しボタン1&2」プロンプトに従ってください、ウィンドウは今 "VRDeviceServerを:クライアント接続の待機中」と表示されます。
NCKソフトウェアの使用4.テスト3D / VR可視化システム
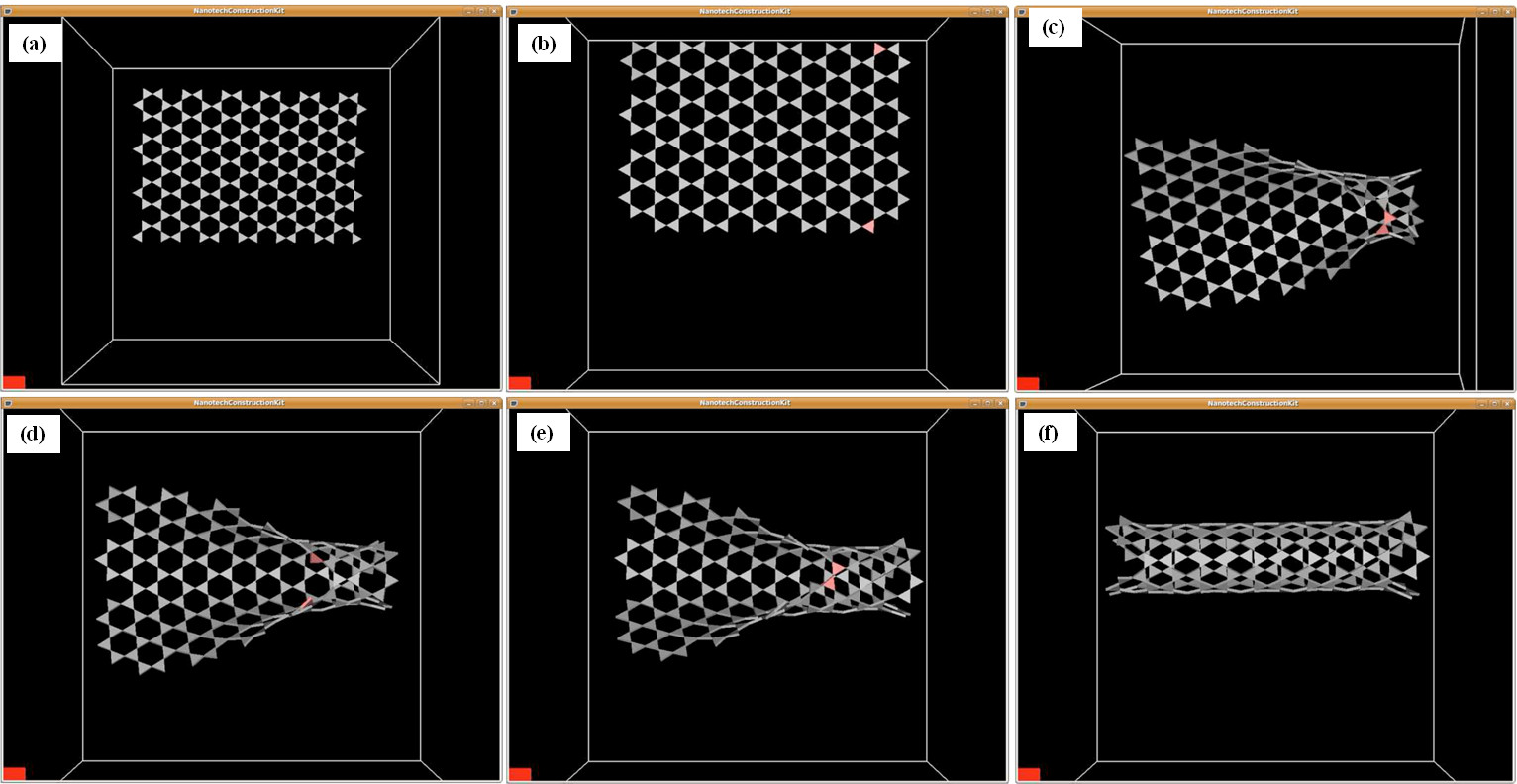
次の指示は、炭素nanotuを構築し、操作する方法、コントローラツールの機能を確立するために、NCKソフトウェアのオンスクリーンメニューの使用方法を概説し、構成炭素原子( 図4)から3D / VRワークスペースであること。結果の結合角と距離(ステップ4.4.10)を測定する方法についての説明は、10オンラインで入手できます。

。カーボンナノチューブ(CNT)を研究するために、3D / VR可視化システムを使用して写真(A)図4.学部の学生 - 。(F)は単層CNTの構築プロセスを示し、この図の拡大版を表示するには、こちらをクリックしてください。
{kind=link}
- ステップ3.11で作成されたモデリングコンピュータ端末ウィンドウ内で、3番目のタブを選択します。 NCKソフトウェアを開始するには、NCKのインストールディレクトリと型に移動します。
「./NanotechConstructionKit -rootSectionローカルホスト-domainsize 36」。 - 触れたり、付属の追跡マーカーを緩めないように非常に注意しながら、3Dゴーグルを置くと、コントローラを拾う。 3Dゴーグルテレビディスプレイの3D / VRの視聴が可能、3DテレビのIRエミッター同期信号を受信していることを確認するためのヘッド/ゴーグル視聴位置を調整します。
- 追加、移動や原子を削除し、次のようにコントローラのボタンにNCKコマンドの関連付けを割り当てるためのツールセットを持つために:
- その後、ホームボタンを離し、押すとWiiリモコンのホームボタンを押し、に移動し、「ツールをオーバーライド」メニュー項目を選択することで、メインNCKオンスクリーンメニューを表示させる。これは、互いに独立して、コントローラ上の異なるボタンにコマンドを割り当てることができます。
- NCK、プレス内の原子を操作するアクション(コントローラの底面に)Wiiリモコンのトリガーボタンを関連付け、トリガーボタンを押したままにするには、#を&画面上のNCKメニューをナビゲート8220、ドラッガー」を選択し、「6-DOFドラッガーは、「その後トリガーを離します。トリガーは、現在の原子を操作するアクションに関連付けられている。
- Wiiリモコンの「+」ボタンに原子を付加する機能を割り当てるには、押すとホームボタンを保持することによって、メインメニューをアップには、「構造単位型」をナビゲートし、「トライアングル」を選択し、[ホーム]ボタンを離す。
- 次にプレスと、「+」ボタンを押したまま「ドラッガー」にナビゲートして選択し、「6自由度ドラッガー」を選び、「+」ボタンを離します。 「+」ボタンが現在選択されたタイプの新しい原子(この場合は三角形で表される炭素原子数)の作成に関連している。
- 「 - 」への原子を削除する機能に割り当てるにはWiiリモコンのボタン、「ホーム」ボタンを押し続けてメインメニューを表示させ、その後に移動し「構造単位の種類を、「選択“ "その後ホームボタンを放し、選択されたユニットを削除します。
- 次に、押したままに - 「ドラッガー」、その後「6自由度ドラッガー」にナビゲートして放し、ボタンを「 - 」ボタンを押し ""。 「 - 」ボタンは、現在削除原子に関連している。
- "1" Wiiリモコンのボタンに「ロック選択されたユニット "の機能を割り当てることが同様の手順に従い、「2」コントローラーボタンに「選択したユニットのロックを解除します」。
- コントローラボタンが設定されたら、次のようにNCKを用いてカーボンナノチューブを作成する。
- 「+」ボタンを使用して、NCKワークスペースに2つの3結合三角形の炭素原子を追加します。彼らは頂点に参加するまで、トリガーボタンを使用して、これらを操作します。
- 六角形の星形を作成するために4個以上の炭素原子を追加します。
- 「ホーム」メニューを使用し、「単位を保存し、「I / Oメニュー」に移動します。
- 離れて現在の位置から6尖った構造を移動します。
- 「ホーム」メニューを使用して、「I / Oメニュー」に移動し、その後「ロードユニット。
- 六角形の6原子環の6シート6が作成されるまで( 図5(a))、最後の2手順を繰り返します。
- 「1」ボタンを使用すると、一番上の行に一つの原子をロックして、下の列の反対側の原子。ロックされた原子はピンク色( 図5B)でマークされます。
- その自由な頂点が、対向するロックされた原子の自由な頂点に近づくまでトリガーボタンを使用して、慎重に円弧状にロックされた原子の一つを移動します。彼らは、原子魅力がそれらを結合( 図5C)に参加することになりますことを十分に接近している時に緑色の線は頂点の間に表示されます。一度成功して参加し、「2」ボタンを使用して原子の両方のロックを解除。
- 同様に、ロックに参加し、反対側のアトミック版をアンロック続行ticesカーボンシートに、効果的に、最終的なカーボンナノチューブ( 図5D-5F)にシートを「ジッピング」。

に対する容易な操作を可能にするために(A)(ピンク色の三角形として示されている)六角形の炭素環の6×6シート(グラフェン)、「ロック」(B)に対向する炭素原子を示す単層CNTの図5のステップワイズ作成現実的な原子間力が、対向する両側の原子間の結合を可能にするために慎重に湾曲した(C)カーボン(グラフェン)シート、カーボンを継続する結合(D)をさらにカーボンシートの湾曲を補助するためにロックされた二つの追加の対向する炭素原子を、(E)追加の対向する炭素原子元のcは、対向する原子の逐次接合後に形成されたシートナノチューブへの曲率、および(F)最終CNTアルボンシート(グラフェン)。 この図の拡大版をご覧になるにはこちらをクリックしてください。 - ナノチューブが完了すると、構造的な角度と距離10を確認するために画面上の測定ツールを使用する。
{kind=link}
分子動力学シミュレーションモデルの5可視化
- ( 図2Aを参照)3D / VR NCKソフトウェアに初期結晶SiO 2の立方体モデルをインポートし、初期の構造を調べる。
- オープンソースプログラムは11とLAMMPS 12が原因で 、この研究の焦点によく適している機能を標的とされたMDCASK。後者のプログラムは、その多様な原子間ポテンシャルとGPU計算能力を与えられたこの研究で使用されている。 LAMMPS MDパッケージ12を使用すると、/シミュレートされた溶湯を実行アモルファスSiO 2番目を生成するために、この初期構造上の手順をクエンチ ructure。このシミュレートされた手順の詳細は、以前の出版物13-15で見つけることができます。
- 3D / VR NCKソフトウェアに生じた新たなアモルファス(無秩序)はSiO 2モデルをインポートし、構造を調べる( 図2Bを参照)。
- オープンソースコードのNanospringCarver 16と関連した教育のドキュメント17( 図6)を使用して、新しい非晶質固体の外にはSiO 2ナノスプリング/ナノリボンを作成します。

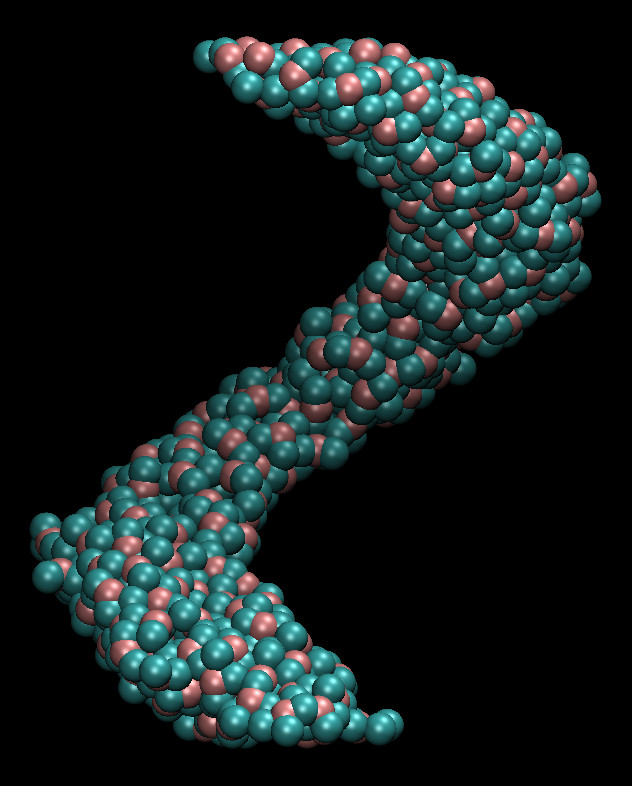
NanospringCarverプログラムを使用して、ナノスプリングの作成 における異なる段階でステップバイステップの原子選択プロセスの図6のイラストパーツ(A - D)が25%、50%、このプロセスの75%から100%の完了を示し17。ターゲット= "_空白">この図の拡大版をご覧になるにはこちらをクリックしてください。 - ナノスプリング/ナノリボン( 図7)に引張シミュレーションを実行するためにLAMMPS MDパッケージを使用してください。この手順の詳細は、以前の出版物15に記載されています。

LAMMPS MDシリカらせんナノ構造(ナノリボン)引張シミュレーション結果から図7.スナップショットイメージ。 - 3D / VR可視化システムでのプレゼンテーションのために、このシミュレーション( アニメーション図1)全体のスナップショットおよびらせんナノ構造のアニメーションを作成するために、オープンソースのソフトウェアツールVMD(ビジュアル化分子動力学)18 ImageMagickの19、FFmpegは20を使用してください。 こちらをクリックしてください大きなVを表示するこの図のERSION。
{kind=link}
アニメーション図1 。螺旋状のナノ構造引張シミュレーションのアニメーション。
結果
この3D / VR可視化システムは、材料科学の研究を行うための新たな機会を提示します。この没入環境は、リアルタイムで動作するように、3次元入力と表示の形で、研究者は、完全にインタラクティブナノスケール器具2に提示される。ここで紹介するプロトコルに従うことによって、シリカらせんナノリボンは、このステップバイステップ方式で作成されました。 LAMMPS MDから産この構?...
ディスカッション
3D / VR可視化システムの正常なインストールと使用における重要な要素は、 物理環境と設計上の考慮事項および補足資料の特別な考慮事項に詳述されている。重要なインストールの考慮事項は、快適な長期的な地位や着席使用のための3D表示の高さが含まれ、カメラに搭載時間をかけて構成を維持するために大規模な3D作業領域、安定したトラッキングカメラと3D表示...
開示事項
著者は、彼らが競合する経済的利益を持っていないことを宣言。
謝辞
We wish to gratefully acknowledge the original inspiration and extensive support provided to us toward the creation of this system from Dr. Oliver Kreylos of the UC Davis Institute for Data Analysis and Visualization. His advice and assistance were instrumental to our success.
We also wish to thank the NSF BRIGE program for providing funding for this project. This material is based upon work supported by the National Science Foundation under Grant No. 1032653.
資料
| Name | Company | Catalog Number | Comments |
| Samsung 61" 3D-capable high definition DLP TV | Samsung | http://www.samsung.com/us/video/tvs | See Protocol Section 3 (Step 3.2) (Large format 3D-capable TV) |
| Alienware Area51 750i modeling computer | Alienware | http://www.alienware.com | See Protocol Section 1 (Step 1.1) (Modeling computer) |
| HP EliteBook 8530w tracking computer | HP | http://www.hp.com | See Protocol Section 2 (Step 2.3) (Tracking computer) |
| V100:R2 IR tracking cameras (3) | Naturalpoint | http://www.naturalpoint.com/optitrack/products/v100-r2/ | See Protocol Section 2 (Step 2.1) and Reference [4] (Tracking cameras) |
| OptiTrack Tracking Tools IR tracking software | Naturalpoint | http://www.naturalpoint.com/optitrack/software/ | See Protocol Section 2 (Step 2.3) and Reference [4] (Tracking software) |
| 3D Goggles and 3D TV IR sync emitter | Ilixco | http://www.i-glassesstore.com/dlp3d-wireless-2set.html | See Protocol Section 3 (Step 3.2) and Reference [5] (3D goggles) |
| Wiimote 3D controller | Nintendo | http://www.nintendo.com/wii | See Protocol Section 3 (Step 3.2) (Wiimote) |
| VRUI, NCK and associated 3D/VR modeling software | Open source software | http://idav.ucdavis.edu/~okreylos/ResDev/NanoTech/index.html | See Protocol Section 1 (Step 1.3) and References [1,6] (VRUI, NCK) |
| LAMMPS molecular dynamics software | Open source software | http://lammps.sandia.gov/ | See Protocol Section 5 (Step 5.2) and Reference [12] (LAMMPS) |
| NanospringCarver program code and files | UC Merced - open source | http://tinyurl.com/qame8dj | See Protocol Section 5 (Step 5.4) and References [16-17] (NanospringCarver) |
| MATLAB GUI files | UC Merced - open source | http://tinyurl.com/qame8dj | See Protocol Section 5 (Step 5.4) and References [16-17] (NanospringCarver) |
| Atomistic bulk glass input file | UC Merced - open source | http://tinyurl.com/qame8dj | See Protocol Section 5 (Step 5.4) and References [16-17] (NanospringCarver) |
参考文献
- Doblack, B. N., Flores, C., Matlock, T., Dávila, L. P. The emergence of immersive low-cost 3D virtual reality environments for interactive learning in materials science and engineering. Mater. Res. Soc. Symp. Proc. 1320, (2011).
- Flores, C., Matlock, T., Dávila, L. P. Enhancing materials research through innovative 3D environments and interactive manuals for data visualization and analysis. Mater. Res. Soc. Symp. Proc. 1472, (2012).
- . 3D goggle source. , (2013).
- . “3D/VR Visualization System - Startup and Shutdown Protocol” and “3D/VR Visualization System – CNT Modeling Example” documents Available from: https://eng.ucmerced.edu/people/ldavila/home/3d-vr-visualization-system-dissemination-of-research-results-and-products (2013)
- . MDCASK molecular dynamics code Available from: https://asc.llnl.gov/computing_resources/purple/archive/benchmarks/mdcask (2013)
- Feuston, B. P., Garofalini, S. H. Empirical three-body potential for vitreous silica. J. Chem. Phys. 89 (9), 5818-5824 (1988).
- Dávila, L. P., et al. Transformations in the medium-range order of fused silica under high pressure. Phys. Rev. Lett. 91 (20), 2055011-2055014 (2003).
- Doblack, B. N. . The structure and properties of silica glass nanostructures using novel computational systems. , (2013).
- Meagher, K. A., Doblack, B. N., Ramirez, M., Dávila, L. P. Scalable nanohelices for predictive studies and enhanced 3D visualization. J. Vis. Exp. In-Press, .
- . University of California Television (UCTV). Our Digital Life series: The Future: Teaching and Life-Saving Tools episode. , (2013).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved