
Method Article
フロアプロジェクション迷路を用いた記録神経活動のための自動化された視覚認知課題
要約
我々は、床の投影迷路に完全に自動化された認知課題の慢性電気生理学的記録のためにラットを訓練するためのプロトコルを記述します。
要約
学習および記憶のメカニズムを調べるために、霊長類において使用される神経心理学的なタスクは、典型的には、視覚的に認知タスクを案内される。私たちは、他の種と実験結果の比較を可能にする強力なラットの視覚的な能力のために最適化された床の投影迷路1,2を使用したラットのための視覚認知課題を開発しました。
学習および記憶の神経相関を調べるために、我々は、床投影迷路1,2上の完全に自動化された認知的タスクに電気生理学的記録を統合している。動物の追跡システムとインタフェースの行動ソフトウェアは、画像提示の正確な制御と動物の行動の監視を可能にし、より良い訓練された動物のための不測の事態に報酬を与える。 in vivoでの電気生理学的記録システムとの統合は、指定された認知課題の選択されたエポックで神経活動の行動相関の検討を可能にします。</ pの>
私たちは、げっ歯類および電気生理学的アプローチと頭蓋内の報酬への情報の自動化された視覚的なプレゼンテーションを組み合わせたモデルシステムのためのプロトコルを記述します。我々のモデルシステムは、より良い特定の認知プロセスに貢献する特定のメカニズムを分離し、識別するために、他の認知タスクのためのフレームワークとしてのツールの高度なセットを提供しています。
概要
視作業は、一般に、学習および記憶のメカニズムを調べるために、ヒトおよびサルの研究で使用されている。げっ歯類モデルは、しかし、より容易に、より良好に制御するための研究の大規模研究者にアクセス可能であり、より侵襲的な電気生理学的技術を可能にするというさらなる利点を有する。このような遺伝子操作などの他の手法と組み合わせて、自由に動くラットに電気生理学的記録は、正確に認知プロセスのメカニズムや回路を標的化するための有用なモデルを提供する。ラットのタスクが環境と相互作用するように被験者を必要とするのに対し、霊長類の視覚的なタスクは、モニタ上視覚刺激に視線を向けるための被験者を必要とする。フロアプロジェクション迷路を同時に視覚刺激に出席している間、積極的な環境を探検するラットの自然な傾向を利用しています。
げっ歯類のために特別に設計されたタッチスクリーン装置を用いて認知タスクが可能になった人間3の齧歯類モデルからの調査結果のより良い翻訳。タッチスクリーン·タスクは、典型的には3-7の壁上に垂直に提示二次元の視覚刺激とのチャンバー内で行われる。これらのタッチスクリーンのタスクはターゲット視覚刺激に向けてリアの対象を必要とし、その応答を登録するために圧力パッドの赤外線フォトビームやプレスを破る。解剖学的および行動的証拠は、しかし、ラットは行動8-10を案内するためのより効果的に下側半側視野に視覚情報を処理することを示唆している。私たちの研究室では、2次元視覚刺激は、バックテスト、アリーナの床に投影された床投影迷路2を利用し認知課題を開発しました。タッチスクリーン装置に比べ大規模なオープンアリーナでのタスクを実行するときに床の投影における迷路ラットを追跡することができます。したがって、記録された神経活動の空間情報は、視覚情報のAN神経相関に加えて得ることができるDの意思決定。
我々は、報酬11として内側前脳束(MFB)に頭蓋内刺激(ICS)を提供します。報酬配達のこの方法は、食べ物や飲み物の報酬よりも有利である。食べ物や飲み物の報酬は、動物が実行し、潜在的に訓練プロセスを遅くします試行回数を制限することも、絶食ラットでは、飽食につながることができます。 ICSは、タスクのパフォーマンスに即座にフィードバックを提供するインスタント報酬を提供します。実質的に即時報酬速く整形および獲得をもたらし、訓練プロトコルの継続時間を低減します。また、試験のより多く収集されたデータの量を増加し、タスク関連の動作をより確実に試料が得られる、セッションで完了することができる。
床投影迷路を用いて、複雑な認知タスクを実行するために、ラットの行動を成形する一般的なプロトコルについて説明する。 THIS一般的なプロトコルは、現在注目を集め、視覚的弁別1の神経相関を記録するために使用される様々なタスク間でラットを訓練するためのフレームワークを提供します。このように、床投影迷路は、ラットの視覚能力に最適化されており、ヒトとヒト以外の霊長類の視覚的なタスクをより強力な比較が可能です。
プロトコル
すべての手順は、ブラウン大学機関動物実験委員会のガイドラインに従った。
1。システムの概要
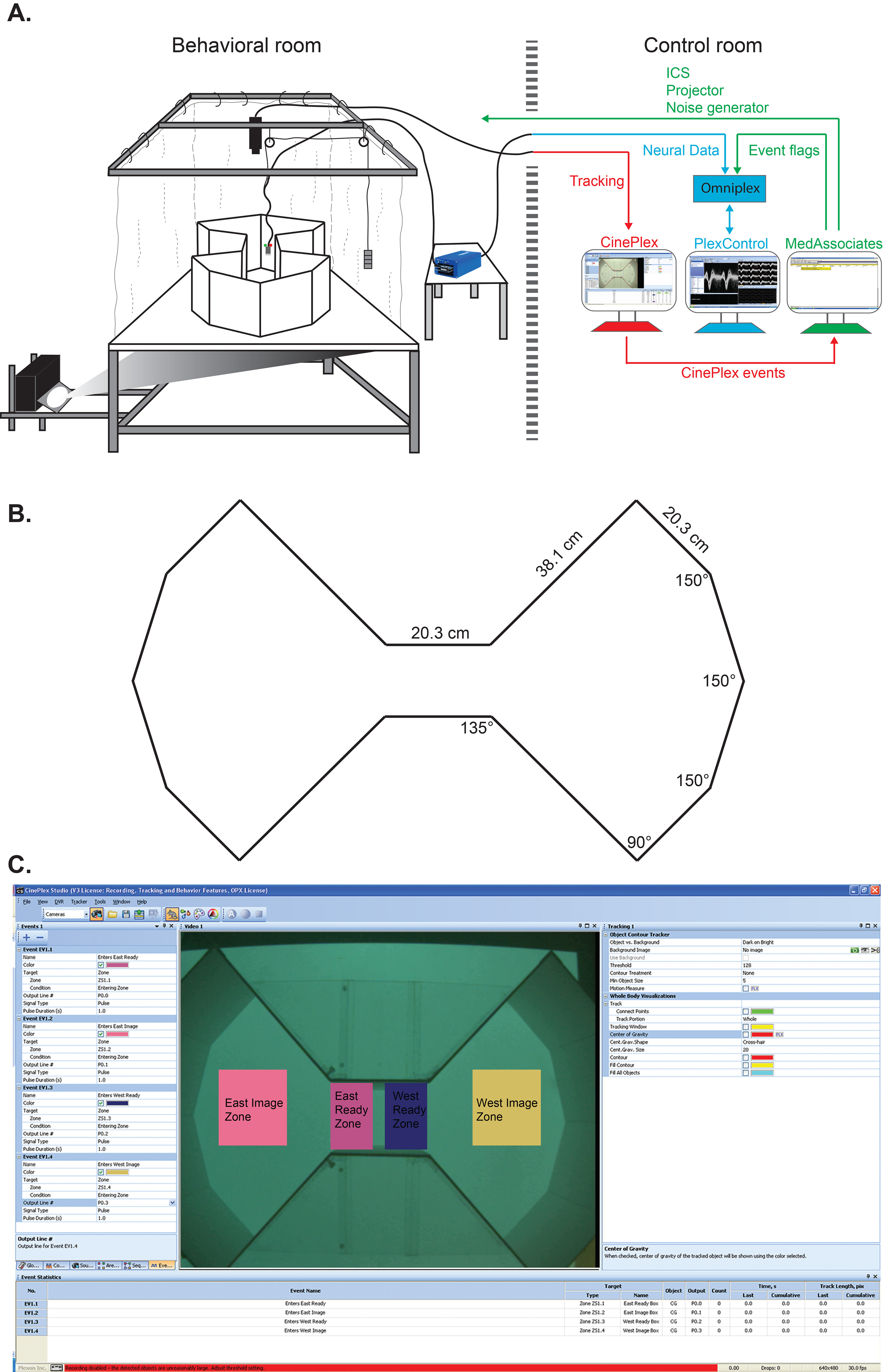
ビデオ追跡システムは、特定のタスクにあるラットの進行状況を監視するために、行動制御システムと相互作用する標的行動を評価し、制御刺激提示およびラットの進捗状況に基づいて報酬を提供します。生体内の電気生理学的記録システムは、イベント関連の分析のための神経データを収集します。 ( 図1A)。
- フロアプロジェクション迷路
- フロアプロジェクション迷路2は、無色透明のプレキシガラスの床と壁のないオープンフィールド(147.3センチメートルX 111.8センチメートル)(0.6センチメートル厚)である。床の下側は、短焦点プロジェクターを使用してリアプロジェクション用のプレキシグラス片(147.3センチメートルX 111.8センチメートル×1.25 cm)以上の第二の四角形の上に引き伸ばされ、ユニティ·ゲインデュアルビジョンファブリック画面です。
- プロジェクターを接続します行動システムにおけるPCのビデオカード。陽極酸化アルミフレームを使用してプレキシグラス、スクリーン生地、プロジェクターを開催しています。
- ラットにICSとヘッドステージテザーをインタフェースするために、オーバーヘッドカメラと滑車システムをマウントするためにオーバーヘッドアルマイトフレームを取り付けます。
注:プリアンプに電気的連続性とグラウンドを確保するために、床投影迷路とオーバーヘッドのフレームを保持するフレームを接続します。
- ビデオトラッキング
- 記録、トラックとステップ1.2.2で説明した単一のオーバーヘッドカメラでリアルタイムに映像を分析します。
- ラットを監視するためにオーバーヘッドが陽極酸化アルミフレームにオーバーヘッドカメラ(標準VGA、80 FPS)をマウント
- ラットの位置を監視する、または自動追跡システムを有するラットの輪郭の重心を追跡するために、ラットのヘッドステージに取り付けられた発光ダイオード(LED)のいずれかを使用する。
- ONL位置データを分析するためにシネプレックス基本行動モジュールを使用またINEと、さらに、オフライン分析用のデータファイルを保存します。
注:私たちは、ラットの位置を追跡し、分析、記録のためにシネプレックス行動研究システム3.4.1を使用しています。映画館·トラッキング·モジュールは、ラットを追跡するために使用される。動物の進行を効果的に追跡するための、タスク内の意義を持っている迷路の関連位置で2次元空間内のゾーンを作成するためにシネプレックス基本行動モジュールを使用しています。ゾーンは、シーケンスに組み合わせることが可能であり、(このようなゾーンとシーケンスの履行へのエントリなど)シネプレックス論理イベントは、ラットがイベントの基準を満たしている場合、そのイベントがtrueになるように割り当てられます。行動システムに巨大港入力カード経由でデジタル出力とインターフェースを持つイベントを割り当てます。
- 完全に自動化された行動制御システム
- 行動試験アリーナ:床投影迷路上の行動タスクに適切な形試験アリーナを使用してください。アールを構築NAはマットホワイトアクリルを使用して、床投影迷路の上に直接配置します。
注 :寸法が使用行動のタスク用にカスタマイズすることができます。壁は、通常、高さが45〜50センチメートルです。ここでは、(ボウタイ迷路の寸法については、図1(B))のセッションで行わ試行回数を最大化するために、両面試験領域(ボウタイ迷路12)を使用します。東画像領域、西画像領域、東裁判準備エリア、西裁判準備エリア( 図1C):テストアリーナはトラッキングソフトウェアで定義された4指定された領域があります。 - 行動システム:MED-PC IVのソフトウェアによって制御行動インターフェースシステムは(付録参照)、社内MEDstate表記で書かれたプログラムを実行します。タスクの実行中に、ラットの進行状況を追跡するためにシネプレックス行動システムからのイベントを使用して、制御画像提示、オーディオキューを提供し、報酬を提供します。
- 時間目を取得するオムニプレックスデジタル入力に巨大港出力カードをインタフェースオフライン分析のためのPlexControlソフトウェア環境における行動イベント発生を怒った。プログラマブルなオーディオ·ジェネレータを使用して、聴覚的な手がかりを発行します。
注:必要に応じて、ここで紹介する装置からの行動イ ベントは、データ転送ボードを経由して、サードパーティの装置(optogenetic刺激のための例えば 、レーザ)を操作することができます。 - 家のテーブルトップインタフェースキャビネットの巨大港出力カード、巨大港入力カードおよびプログラム可能なオーディオジェネレータ。卓上キャビネットに取り付けDIG-700Fデコーダカードを使用してパーソナルコンピュータ(PC)にインストールされてDIG-704PCI-2のPCIカードとカードのインタフェース。
- プログラム可能な頭蓋内自己刺激刺激器を用いてラットに、バイポーラ方形波ICを提供します。 PHM152 COMカードを介してパソコンに刺激ユニットを接続します。推奨ICSパラメータ:パルス1及び2時間:500秒、パルス1と2の間の遅延:500秒;周波数:100 Hzの。
注:ICS配信タスクの実行中に自動化されているが、手動でSmartCtrlモジュールとインタフェースのプログラム可能なボタンボックスを使用して配信することができます。
- 時間目を取得するオムニプレックスデジタル入力に巨大港出力カードをインタフェースオフライン分析のためのPlexControlソフトウェア環境における行動イベント発生を怒った。プログラマブルなオーディオ·ジェネレータを使用して、聴覚的な手がかりを発行します。
- 行動試験アリーナ:床投影迷路上の行動タスクに適切な形試験アリーナを使用してください。アールを構築NAはマットホワイトアクリルを使用して、床投影迷路の上に直接配置します。
- 神経データ収集システム
- 確実にフロアプロジェクション迷路フレームおよびICSシステムは、神経のレコーディング中に電気的なノイズを最小限に抑えるためにオムニプレックスニューラルデータ収集システムのプリアンプに接地されている。
- 同時に神経のデータを収集、オフラインのデータファイル内の行動システムからシネプレックスと行動イベントフラグの位置座標を分析しています。
2。動物の準備
- 動物
- ナイーブ22日齢の雄のロングエバンスラットを入手します。
- ペアは、ラットを収容し、それらを1週間動物施設に順応することができます。
- 〜5分間、毎日ラットを処理します。
- ラットは250〜275グラムに達すると、それらの自由摂食体重の85から90パーセントで、体重を維持する食品のスケジュールを開始します。ターゲットたちラットは350グラムに達するまでightsは10グラム/月に増加している。
- シングルハウスラット及び刺激と記録電極を移植する手術を開始する前に、少なくとも1週間のための食品のスケジュールを継続する。
- 外科的移植
標準無菌状態での外科的処置を実施し、制度·規制ガイドラインに従った。- イソフルランでラットを麻酔。
- クリーニングとブレグマとラムダの識別のための頭蓋骨を明らかにするために、頭皮に切開する。
- 該当する座標に開頭術を行います。
- 頭蓋骨のアンカーのネジを固定します。
- 以下の座標を用いて、MFBにICS電極の先端を下げる:ブレグマから前後方向、-2.7ミリメートル、横1.8ミリメートル±、頭蓋骨の表面から背腹、-8.5ミリメートル。第ICS電極は、電極の故障の場合のバックアップとして反対側の半球に移植することができる。
- tにICS電極を固定します彼骨セメントで頭蓋骨とアンカーのネジ。台座電極の(刺激電極のプラスチック製ハウジングを)セメントしないでください。
- 目的の部位に記録電極を下げ、骨セメントでデバイスを固定します。
- 離れて記録装置からICS台座を置き、骨セメントで固定ネジにICS電極と記録装置を固定します。
- シェーピングプロトコルに慣れを開始する前に、少なくとも7日間の回復を可能にします。
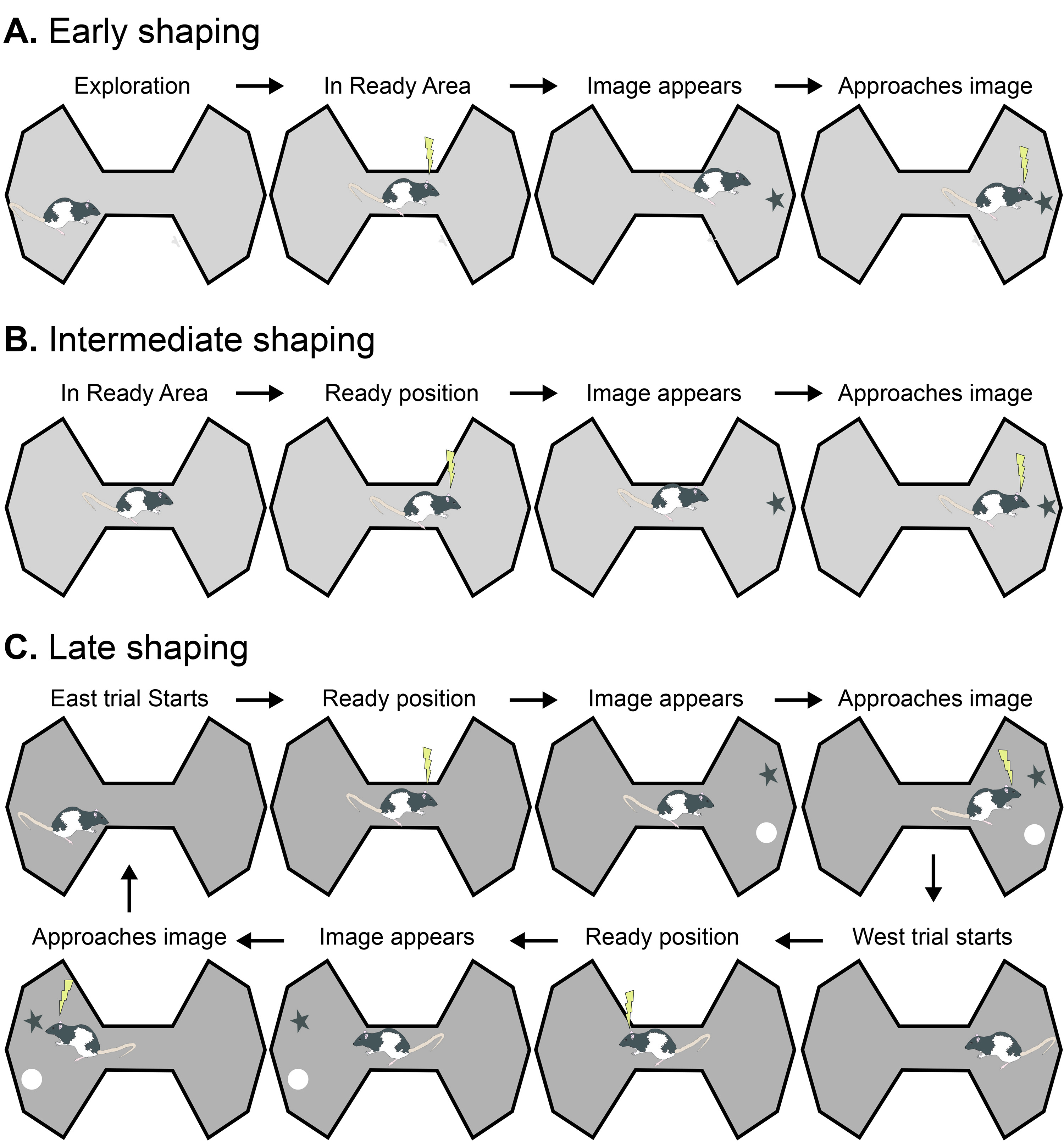
3。行動シェーピング:初期、中間、および後期シェーピング(図2):一般的なシェイプの3つのステージで構成されます。
注:初期と中間シェーピングの目的は、それぞれの試験のために準備エリアで静止'準備位置」を維持し、セッション内で数々の試験を行うために、ラットを訓練することです。行動シェーピングを半自動化するので、トレーニングがラットの個々の学習速度に適合させることができる。 ONCEAラットは、正確かつ公平な行動の制御のための完全に自動化されたプロトコル( 図2)上にラットを転送することを目的として特定のシェーピング(後期シェーピング)をタスクに進み、成功した「準備位置」を維持している。
- 初期のシェーピング( 図2A)
- 1日目:機器は、その後の植民地に戻ることに切り替えて10分間の行動の部屋にラットを慣らす。
- 2日目:手順1を繰り返し、その後、10分間の試験領域に動物を慣らす。
- 3日目:ラットにICSとヘッドステージテザーを接続し、10分間の試験領域にラットを慣らす。
- 4日目:非公式な場所選好調整プロトコルを使用して場所嗜好を確立するために、最も低いのICS振幅を決定。パルス1及び2の振幅を滴定。典型的な振幅値が20〜80μAです。
- 5日目から私に準備エリアと東と西の画像プレゼンテーションを関連付けるために、ラットを訓練するために、ICSの報酬を配信CSの報酬。ラットは東と西の画像領域との間で交互にされるまで継続する。
- 中間シェーピング( 図2B)。
- 試験の開始を通知するためにホワイトノイズ(50デシベル)を導入。ラットが準備領域に入ったときにホワイトノイズの電源をオフにします。
- レディエリアに入るため、ICSの配信を自動化し、成功した「準備位置を「完了するため。行動を強化するために、エントリ成功 '準備位置」で、ICSの配信の確率を調整します。
注:成形中の個々のラットのパフォーマンスに合わせて手動で報酬確率を調整します。レディエリアに入るための報酬確率を減少させ、成功した準備位置を維持。成功した「準備位置を満たすための報酬のお勧めの最終確率5〜10%です。ラットをすべての正しい選択のために報酬を与えられる。 - 短い「準備位置」期間( 例えば 200ミリ秒)で始まります。徐々に「準備完了位置」硬膜を増やす100ミリ秒ステップでtions。
- ラットが裁判を再起動する必要がありますので、ラットが途中で「準備完了位置」を壊した場合のホワイトノイズの電源をオンにします。
- ラットは、最大1200ミリ秒のための「準備位置」に保持されたときに後期シェーピングに移動します。
- 後半シェーピング( 図2C)。
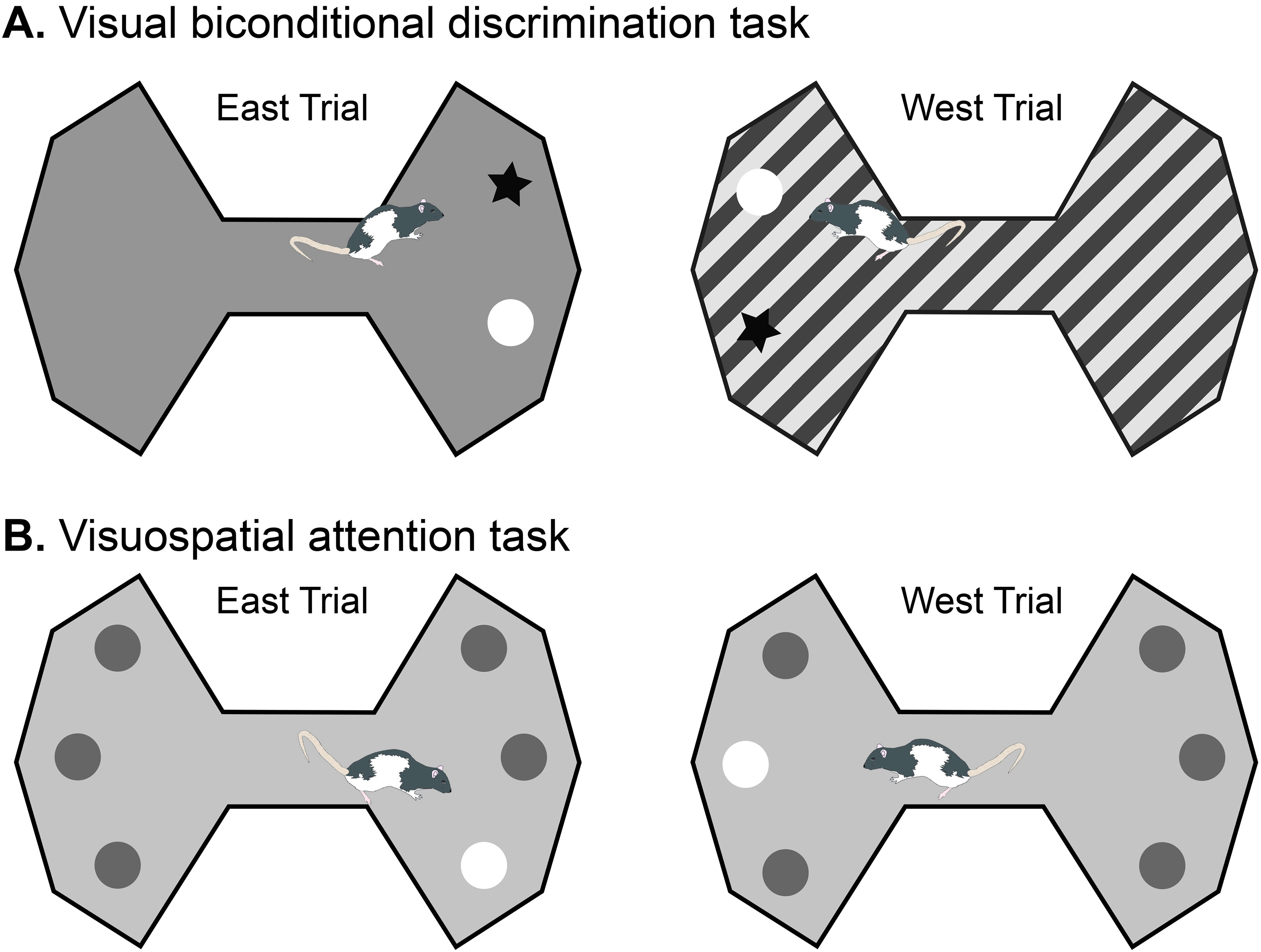
注意:後期形成する上でのトレーニングは、ラットが実行するするタスクに固有のものです。すべてのタスクのパラメータの正確で公平な制御のために、この成形工程での訓練を自動化するが、手動でのICSの報酬を提供する柔軟性を維持する。 2タスクのための訓練プロトコルが記載されている。- 視覚的な相互条件的な差別(vBCD)タスク:シンプルな形状と輝度discriminenceにラットを訓練するために明確な視覚刺激を使用してください。
- ホワイトノイズをオンにすることでトライアルを開始します。
- 1200ミリ秒 - ランダムに700の「待機位置」の待ち時間を課す。
- 成功した「準備POを強化するために、必要に応じて手動でICSを提供sitions '。
- 画像提示領域に画像のペアを提示する。擬似乱数画像領域の左側または右側に正しいイメージを提示する。
- 正しい応答用ICを提供し、床をオフにします。ラットが正しい画像が位置するゾーンに入ったときに、正しい応答が登録される。研修の初日にのみ、不正な応答のための抑止力としてホワイトノイズの75デシベルバーストを発行します。
- 不正な裁判の後補正トライアルを発行します。補正試験は、以前の不正な試みとして同一のパラメータ(左または右側と「待機位置」レイテンシー)を持っています。
- ラットは成功し、単純な判別を行うことができますと、相互条件的な差別ルールを訓練するために異なるフロア·パターンを紹介します。
- コンテキストとして機能する画像や二つの異なるフロアパターンの新しいペアを提示する。正しいイメージが床パターンを条件とする。 例えば 、黒STA床は灰色で、床は( 図3C)ストライピングされたときに白い円が正しい場合、Rは正しいです。
- 擬似乱数床パターンと試験が相殺されることを保証する各試験のための正しい画像の位置を(左または右)を割り当てます。
- トライアルのパラメータは、前臨床試験と同一である不正な裁判の後、補正試験を実施する。
- 視空間注意(VSA)タスク:ターゲット円の空間的位置に接近するラットを訓練するために舞台で定義された空間的位置で照明白丸を提示。
注:このタスクの場は、東と西の画像領域内の異なる空間位置に灰色の円があります。成功した「準備位置'の後に、ターゲットサークル(白く)が点灯し、ラットがそのターゲット位置( 図3B)に近づく必要があります。- ランダムに1,000-1,60の「待機位置」の待ち時間を課す試験的に裁判上の0ミリ秒。
- 成功した 'レディーポジションを'強化するために、必要に応じて手動でICSを提供します。
- 「準備位置」の終了後、ランダムに灰色の円のいずれかを照明する。
- ラットが照らさ円のゾーンに入ったときに、ICSを提供します。
- 照明をオフにして、反対(東または西)側の次の試行を開始。
- ラットがそれに近づくか、裁判を終了する(円を照射した後5秒)まで遅くまで造形の開始時に、円を照らす。正しいまたは不作為トライアルのいずれかとし、各試行のスコア。抜き試験のために、全体の床(提示白い床)を照明し、何の報酬は次の試行まで利用できなくなります。
- ラットのパフォーマンスが80%正確に到達すると、円は1秒点灯したままの時間の量を減らす。ラットが選択をする5秒を持っています。
- 不正な試験のために報酬を与えるしないでください。次の試行を開始します。
- もし抜けトライアルは、床面を照らすと新しい試みを開始します。
- 正しいさらに80パーセントの目標円が500ミリ秒に点灯している時間を短縮する。
- ランダムに各試行する前に、ターゲットの位置を選択します。フロア全体がその試験の終了を通知するために点灯する前にラットが選択をする5秒を持っていきます。
- 不正確または不作為試験のために報酬を与えるしないでください。ラットは、アリーナの反対側に新たな審理を開始する必要があります。
- 注:追加の円は、さらに、タスクの難易度を増加させるために、各画像領域に添加してもよい。
- 視覚的な相互条件的な差別(vBCD)タスク:シンプルな形状と輝度discriminenceにラットを訓練するために明確な視覚刺激を使用してください。
結果
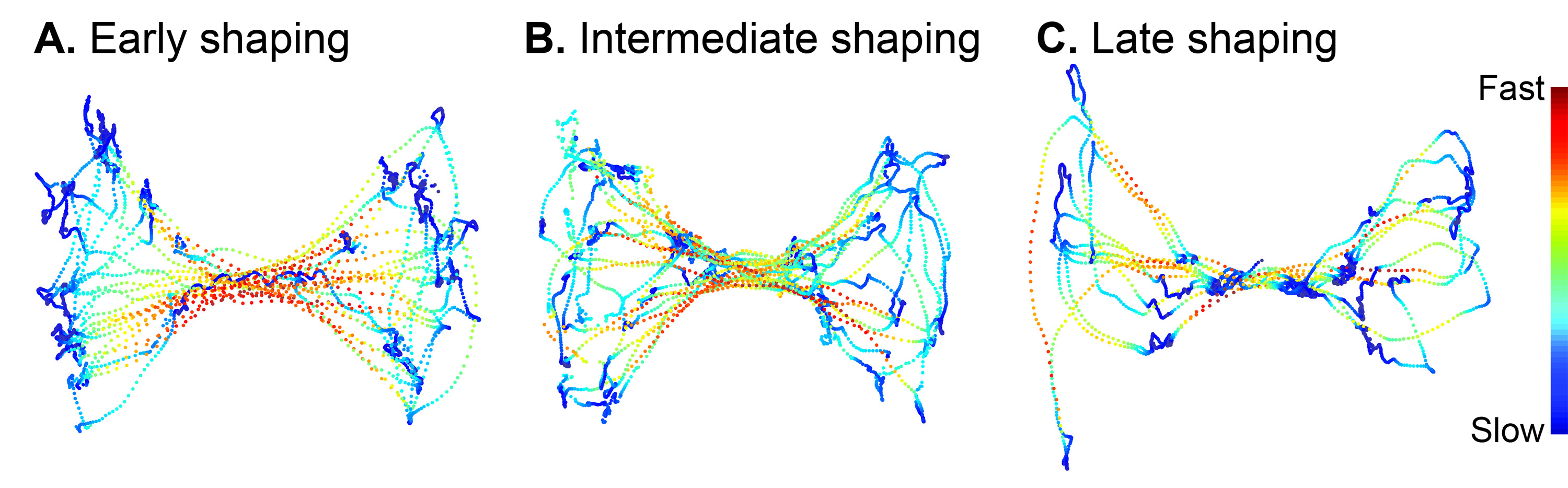
一般の成形段階の目標は、試験領域にラットを順応ターゲット視覚刺激を提示するための固定「準備位置」のままにしたラットを訓練し、正しい視覚刺激の位置を近づけることである。ラットはアリーナの東西両側の間で交互にされるまで、試験室、アリーナ、テザーに慣れた後、初期の成形は、一般的に100〜150試験が必要です。初期の成形中のラットは、通常、アリーナの中央に準備領域を実行して、アリーナ( 図4A)の周囲を探索ほとんどの時間を費やしています。中間成形段階でのラットは、徐々に600〜700試験が必要な準備エリアで静止「待機位置」を維持することを学ぶ。この時点で、動物のパスは、迷路の外周を過ごした短い時間で画像領域に準備エリアからループをステレオタイプ化されています。しかし、ラットは、静止 '準備がPOを維持されていませんラットは中央レディエリア( 図4B)を横断する速度が示すsition '、。
中間シェーピングの終わりまでに、ラットは、ターゲット視覚刺激に近づく前に、準備エリアで静止「待機位置」を維持する。ラットはその後、アリーナ( 図4C)の反対側に、次の試行を開始します。
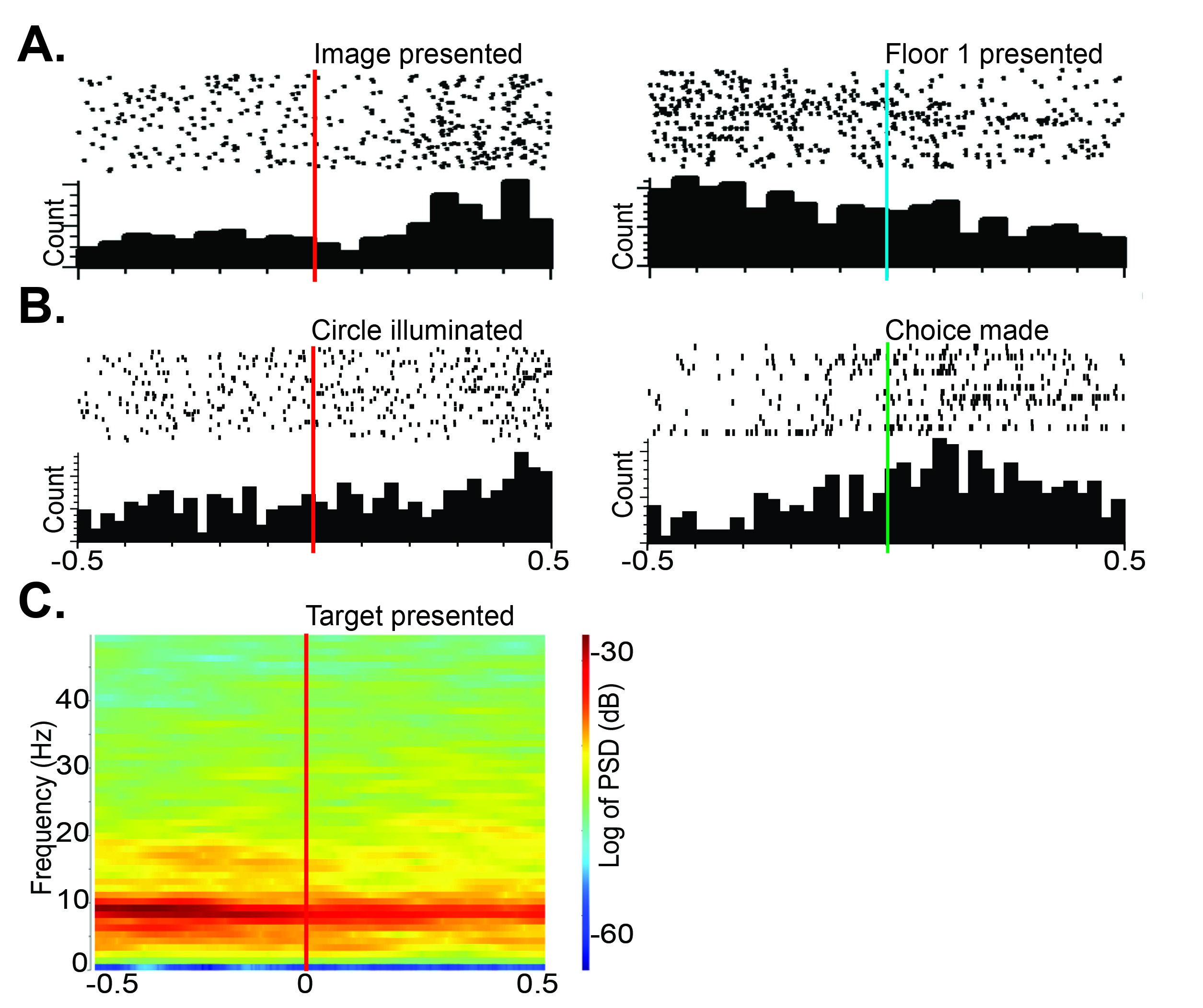
行動制御システムと追跡ソフトウェアとニューラルデータ収集システムの統合は、神経データのイベント関連の分析が可能になります。駆動可能な電極アレイは、戦略的に単一ユニットと局所電場潜在的活性を記録するように配置することができます。ラットはvBCDタスクを実行したときに記録がpostrhinal皮質で行われた。 Perieventヒストグラムおよびラスタプロットはpostrhinal皮質の細胞が標的視覚刺激の開始に、床パターン( 図5A)の開始に応答することを示している。 Rの後部頭頂皮質におけるVSAタスク細胞を実施ATSは、画像の表示に対応し、選択は、対象画像( 図5B)を定義されたゾーンを入力することで作成されたとき。ラットは画像提示( 図5C)の前に「準備完了位置」にあるときに、VSAタスクでの演奏中に、後部頭頂皮質における局所電場電位活動はシータ範囲(〜8 Hz)で強い力を示しています。

図1。実験装置。行動や制御室のA.回路図。フロア投影迷路行動を部屋に収容されている。ラットを、オーバーヘッドカメラによって監視されています。制御室は、タスクを制御し、神経データを収集するための装置を収容する。B.寸法のシネプレックスメーカーのボウタイ迷路℃のスクリーンショット。ゾーンは、ユーザによって定義される。論理的なイベントは、ラットの進行状況を監視するために、行動制御システム(MEDアソシエイツ)にシネプレックスデジタル出力として送信されます。 拡大画像を表示するにはここをクリックしてください。
{kind=link}

図2。ラットを整形する整形ステップの概略初めに。A.レディエリアに入ると、東と西の画像領域を入力するため、ICSを受ける。目的は、ICSの報酬でこれらの領域を関連付けることがラットを訓練することである。B.中間整形が準備エリアで静止「待機位置」を維持するために、ラットを訓練に焦点を当てています。画像はONLされていますY成功 '準備位置」を維持した。ラットは画像領域内の画像に近づくために、ICSを受け続ける。後期成形時で 、ラットは正常に静止した「準備完了位置」を維持している。訓練は、特定のタスク、およびラットを与えられたタスクを実行するために、特定のルールを学ぶために訓練されている。雷は、ICSの配信を示しています。 拡大画像を表示するにはここをクリックしてください。
{kind=link}

図3。A. vBCDタスクの概略床は灰色である場合には、ブラックスターが報われて、 床がストライピングされた場合、白丸が報われているB。 VSAタスクの概略。灰色の円は、画像領域内のターゲット位置を示す。標的刺激は円の1の簡単な(500ミリ秒)照明(白)です。ラットを正しい目的の場所に近づいて報われています。 拡大画像を表示するにはここをクリックしてください。
{kind=link}

図4。異なるシェーピングステップで実行するラットの2分のセグメントから。位置データを整形する時などパス 。動物の速度がヒートマップにより表される。冷たい色が最も遅い速度を表し、熱い色は最速のスピードを表しています。A.初期の造形ラットの間に探求し、リアまで東西画像領域の外側の壁にし、準備エリアに停止しないでください。B。ステレオタイプのパスは、中間SHに出現し始めAPING。パスは戻って準備エリアに画像領域に向けてループを形成する。ラットは正常に準備エリアで「準備位置」を維持するために開始します。C。ラットは後期シェーピングに進行すると、ラットは、静止'準備ポジションを「維持し、ラットのパスは、よりステレオタイプです。 拡大画像を表示するにはここをクリックしてください。
{kind=link}

図5。perievent関連解析の例。対象画像(左)の発表に対して異なる応答を持つvBCDタスク、および床(右)。Bのプレゼンテーション中postrhinal皮質から記録した細胞。中に後部頭頂皮質から記録された細胞サークル(左)の照明に対して異なる応答を持つVSAタスク。ターゲットサークル(右)。Cと照らされた空間的位置を選択した後、焼成を増加させた。 「準備位置」の間に後部頭頂皮質に強いシータ力を示すスペクトログラムで。縦の赤い線が成功した「準備位置」や画像のプレゼンテーションの終了を示します。縦の青い線は裁判で1階の提示がvBCDタスクで起動することを示します。縦の緑の線は選択は、VSAタスクに登録されたことを示します。 拡大画像を表示するにはここをクリックしてください。
{kind=link}
ディスカッション
我々は正式にフロアプロジェクション迷路上の完全に自動化された複雑な視覚認知課題にラットを訓練するためのプロトコルを記述します。フロアプロジェクション迷路は、2択の視覚弁別課題1でのパフォーマンス中にpostrhinal皮質におけるオブジェクトの位置接続詞と誤差信号の神経相関を確立するために成功裏に使用されてきた。
行動整形プロトコルは、それが個々のラットの学習速度に合わせて適合させることができるように柔軟に設計されている。行動システム用に書かれたカスタムコードは、実験者が訓練中に重要なステップで、自動化されたICS配信の可能性を制御することができます。 例えば 「待機位置」を訓練する。このコードでは、中のプログラム可能なボタンボックスを使用して、ICSの手動配信を許可する必要があります。初期のシェーピングの目的は行動を強化する報酬送達に有効なICS刺激を確立することである。我々は、STIを移植することをお勧め可能な場合一方の半球には効果がない刺激の場合に、両側MFBに電極をmulating。我々の経験は、しかし、ほぼすべて注入されたICSの電極がやりがいの刺激を提供するための機能であったことでした。中間シェーピングステージが準備エリアの「待機位置」を維持するために、ラットを訓練するために重要である。 「準備完了位置」に、ラットは、その鼻は選択画像が表示されます画像領域の方を向いて静止しなければならない。 '準備位置は、「画像が表示された場合に制御し、ラットは、画像やラットが、画像を見て、そこからの距離に近づく方向から。我々は、ラットの頭部が挙動のより良い制御と目標画像提示をより正確に制御するための向いている方向を監視するために、ラットのヘッドステージに搭載されたトラッキングLEDをお勧めします。 ICSのマニュアル配信は、適切な「準備位置&#を維持するために、ラットを訓練するために発行することができます8217;。ラットが各試行で満足」準備位置を「維持されると、後期形成する上での訓練は、特定のタスクである。レイト造形のラットは、与えられたタスクを実行するために特定のルールを学ぶために訓練されています。
このメソッドは、行動成形中に高速な学習結果のラットに即座にフィードバックを提供し、自動化されたタスクの神経のデータを収集する際に、よりセッションで試験を完了したとして、我々は報酬の配信の手法としてICSを使用しています。 ICS送達は、しかしながら、ニューラルレコーディングの電気アーチファクトをもたらし、連続LFPまたはマルチユニットデータを分析するための問題となり得る。電気的なアーティファクト周辺の間隔は、従来の連続データ解析神経記録データファイルからオフラインで除去することができる。ハイパスフィルタのスパイクデータ内のICSからのステレオタイプの成果物を簡単に単一のスパイクを分析して影響を与えることなく、オフラインで削除することができます。フロアプロジェクション迷路のためのプロトコルの将来の最適化がoptogenを使用することを含む電気刺激に関連する成果物を最小限にし、排除するための内部の報酬を提供する企業再生支援機構のツール。
フロアプロジェクション迷路は、ラットの視覚機能に最適化されており、視覚的に導かれた行動のタスクのためにこのように適していている。これは、直接比較が原因で採用異なる実験プロトコルや、与えられたタスクを正常に取得するための基準の異なる定義の床投影迷路とオペラントチャンバー内の実験パラダイムの間で行うことができないことに留意すべきである。我々は以前、ラットは画像がオペラントチャンバー3,10内に垂直に発表された他の研究で> 300試験と比較して床投影迷路2〜50の試験で簡単な2択の視覚弁別課題を買収していること、しかし、示されている。 VSAタスクは、視覚的注意のを評価するために設計された古典的な5択のシリアル反応タスク13(5-CSRT)をモデルにしたプロセス。通常は5-CSRTはオペラントチャンバー内で実施され、光のフラッシュで示され、適切な鼻突く穴に鼻突くを作るために動物を必要とされ、ここでのVSAタスクは、動物が残ってしなければならない、オープンアリーナで行われるアリーナ内の特定の場所に静止し、ターゲット位置に注意を向け、光刺激が表示されるのを待ちます。我々の経験では、ラットは、床の投影迷路の中でのVSAタスク〜800試験と比較して5-CSRT 14で基準(2日連続で75%)に達する〜3200試験を必要とした。
フロアプロジェクション迷路で実行行動課題のもう一つの利点は、タスクが、その視線を固定するために動物を必要とするタスクとは対照的に、その環境を探索するため、ラットの自然な傾向を利用し大規模なオープンアリーナで行われているということです静止ターゲット。オープンアリーナ·中を自由に動くラットを利用する主な利点#160;床投影迷路装置内には、他者中心と自己中心的な空間情報の両方が視覚情報を収集することができるということです。私たちのパラダイムのもう一つの利点は、タスクは静止画像の表示に限定される必要がないことである。位置および動的で視覚刺激の特徴は、今後の課題で使用することができる。映画館行動研究システムの追跡機能を使用して、タスクが所与の脳構造のより詳細な機能的な理解のために開発することができる。視覚的に導かれた認知課題との同時電気生理学的記録を組み合わせることで、脳の活動は、このような意思決定と、視覚的差別などの認知過程に関連しているかの根本的な疑問を検討することができます。
視覚的に導かれたタスクを使用して、ラットの研究からの知見は、より良い人間の認知症のための治療法を提供することを究極の目標と人間に翻訳することができます。
開示事項
このビデオ·記事の投稿料はPlexon社が主催している
謝辞
この作品は、RDBに、NSF IOS 1146334、NSF EFRI 0937848、DARPA N66001-10-C-2010、およびNSF IOS 0522220によってサポートされていました。我々は、この原稿を製造するのに支援をPlexon社でステイシーハイアットに感謝します。
資料
| Name | Company | Catalog Number | Comments |
| OmniPlex D Neural Data Acquisition System | Plexon Inc | ||
| DigiAmp Digitizing Amplifier | Plexon Inc | ||
| Frame for Floor Projection Maze | 80/20 Inc | 15 Series T-slot framing | |
| Short throw projector | NEC Display Solutions | WT610E | |
| Da-Lite lace and grommet screen | Da-Lite Screen Company | 81326C | |
| Plexiglas | Modern Plastics | ||
| SuperPort Input card | Med Associates Inc | DIG-713A | |
| SuperPort Output card | Med Associates Inc | DIG-726 | |
| SmartCtrl Interface module | Med Associates Inc | DIG-716B | |
| Decoder card | Med Associates Inc | DIG-700F | |
| PCI card | Med Associates Inc | DIG-704PCI-2 | |
| Programmable audio generator | Med Associates Inc | ANL-926 | |
| Programmable Intracranial Self Stimulation Stimulator | Med Associates Inc | PHM-150B | Operated by a PHM-152COM card |
| 2 Channel electrode | Plastics1 | MS303/13/SP | Cut 15-20 mm below the pedestal |
| MED-PC IV Software | Med Associates Inc | SOF-735 | |
| OmniPlex Software | Plexon Inc | ||
| CinePlex Software: Tracking and Basic Behavior Modules | Plexon Inc |
参考文献
- Furtak, S. C., Ahmed, O. J., Burwell, R. D. Single neuron activity and theta modulation in postrhinal cortex during visual object discrimination. Neuron. 76, 976-988 (2012).
- Furtak, S. C., et al. The Floor Projection Maze: A novel behavioral apparatus for presenting visual stimuli to rats. J. Neurosci. Methods. 181, 82-88 (2009).
- Bussey, T. J., et al. The touchscreen cognitive testing method for rodents: how to get the best out of your rat. Learn. Mem. 15, 516-523 (2008).
- Bussey, T. J., Muir, J. L., Everitt, B. J., Robbins, T. W. Triple dissociation of anterior cingulate, posterior cingulate, and medial frontal cortices on visual discrimination tasks using a touchscreen testing procedure for the rat. Behav. Neurosci. 111, 920-936 (1997).
- Forwood, S. E., Bartko, S. J., Saksida, L. M., Bussey, T. J. Rats spontaneously discriminate purely visual, two-dimensional stimuli in tests of recognition memory and perceptual oddity. Behav. Neurosci. 121, 1032-1042 (2007).
- Gaffan, E. A., Eacott, M. J. A computer-controlled maze environment for testing visual memory in the rat. J. Neurosci. Methods. 60, 23-37 (1995).
- Keller, J., Strasburger, H., Cerutti, D. T., Sabel, B. A. Assessing spatial vision - automated measurement of the contrast-sensitivity function in the hooded rat. J. Neurosci. Methods. 97, 103-110 (2000).
- Lashley, K. S. The mechanism of vision V The structure and image-forming power of the rat's eye. J. Comp. Psychol. 13, 173-200 (1932).
- Lashley, K. S. The Mechanism of Vision: Xv. Preliminary Studies of the Rat's Capacity for Detail Vision. J. Gen. Psychol. 18, 123-193 (1938).
- Minini, L., Jeffery, K. J. Do rats use shape to solve "shape discriminations". Learn. Mem. 13, 287-297 (2006).
- Milner, P. M. Brain-Stimulation Reward - a Review. Can. J. Psychol. 45, 1-36 (1991).
- Albasser, M. M., et al. New behavioral protocols to extend our knowledge of rodent object recognition memory. Learn. Mem. 17, 407-419 (2010).
- Bari, A., Dalley, J. W., Robbins, T. W. The application of the 5-choice serial reaction time task for the assessment of visual attentional processes and impulse control in rats. Nat. Protoc. 3, 759-767 (2008).
- Agster, K. L., Burwell, R. D. Structure and function of the rodent postrhinal cortex: comparisons to other cortical regions. , (2007).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved