
Method Article
Automated compiti cognitivi visivi per la registrazione Neural all'attività utilizzando una proiezione Piano Maze
* Questi autori hanno contribuito in egual misura
In questo articolo
Riepilogo
Descriviamo i protocolli per la formazione di ratti per le registrazioni elettrofisiologiche croniche in compiti cognitivi completamente automatizzate su una proiezione Piano Maze.
Abstract
Compiti neuropsicologici utilizzati nei primati per studiare i meccanismi di apprendimento e memoria sono in genere guidati visivamente compiti cognitivi. Abbiamo sviluppato compiti cognitivi visivi per ratti utilizzando la proiezione Piano Maze 1,2 che sono ottimizzati per capacità visive dei ratti che consentono forti Raffronto dei risultati sperimentali con altre specie.
Al fine di indagare i correlati neurali di apprendimento e memoria, abbiamo integrato le registrazioni elettrofisiologiche in compiti cognitivi completamente automatizzati sulla proiezione Piano Maze 1,2. Software comportamentale interfacciato con il sistema di tracciatura degli animali permette il monitoraggio del comportamento dell'animale, con controllo preciso della presentazione dell'immagine e premiare rischi per gli animali meglio addestrati. L'integrazione con un sistema di registrazione elettrofisiologica in vivo permette di esaminare correlati comportamentali di attività neurale in epoche selezionate di un determinato compito cognitivo. </ P>
Descriviamo i protocolli per un modello di sistema che combina presentazione visiva automatizzata di informazioni da roditori e premiare intracranica con approcci elettrofisiologici. Il nostro sistema modello offre un sofisticato insieme di strumenti come quadro per altri compiti cognitivi per isolare meglio e identificare i meccanismi specifici che contribuiscono a particolari processi cognitivi.
Introduzione
Compiti visivi sono comunemente usati in studi umani e scimmie per esaminare i meccanismi di apprendimento e memoria sottostante. Modelli di roditori, tuttavia, sono più facilmente accessibile ai ricercatori di scala maggiore, studi meglio controllati, e hanno il vantaggio di consentire tecniche elettrofisiologiche più invasive. In combinazione con altri approcci, come le manipolazioni genetiche, le registrazioni elettrofisiologiche di muoversi liberamente ratti forniscono un modello utile per indirizzare con precisione i meccanismi e circuiti processi cognitivi sottostanti. Compiti visivi primati richiedono i soggetti per dirigere lo sguardo a stimoli visivi su un monitor, mentre i compiti ratto richiedono i soggetti per interagire con un ambiente. La proiezione Floor Maze sfrutta la naturale tendenza dei topi di esplorare attivamente l'ambiente e contemporaneamente partecipare agli stimoli visivi.
Compiti cognitivi che utilizzano apparati touchscreen progettato specificamente per i roditori hanno permessotraduzione migliore dei risultati da modelli di roditori per l'uomo 3. Attività touchscreen sono in genere eseguite in una camera con due stimoli visivi tridimensionali presentati verticalmente sulle pareti 3-7. Questi compiti touchscreen richiedono il soggetto posteriore verso lo stimolo visivo di destinazione e rompere un photobeam infrarossi o premere su un tappetino a pressione per registrare la sua risposta. Evidenze anatomiche e comportamentali, tuttavia, suggeriscono che i topi elaborano le informazioni visive in emicampo visivo minore più efficace per guidare il comportamento 8-10. Il nostro laboratorio ha sviluppato compiti cognitivi che utilizzano la proiezione Piano Maze 2, in cui gli stimoli visivi bidimensionali sono tornati proiettate sul pavimento dell'arena test. Nella proiezione Piano ratti Maze possono essere monitorati durante l'esecuzione di compiti in una grande arena aperta rispetto ad apparecchi touchscreen. Pertanto, le informazioni spaziali nell'attività neurale registrato può essere ottenuta in aggiunta a correlati neurali di informazioni visive und decisionale.
Consegniamo stimolazione intracranica (ICS) per il fascio proencefalo mediale (MFB) come ricompensa 11. Questo metodo di consegna compenso ha dei vantaggi rispetto cibo e bevande ricompense. Cibi e bevande ricompense possono portare a sazietà, anche nei ratti alimenti privato, limitando il numero di prove un animale si esibiranno e potenzialmente rallentare il processo di formazione. ICS offre ricompensa immediata fornendo un feedback immediato sulle prestazioni dell'attività. I risultati ricompensa immediata in sede di configurazione più veloce e acquisizione e sostanzialmente riduce la durata dei protocolli di allenamento. Inoltre, un numero maggiore di processi può essere completato in una sessione, aumentando la quantità di dati raccolti e causando un campione più affidabile di comportamento correlate all'attività.
Utilizzando il Labirinto Piano di proiezione, descriveremo un protocollo generale per modellare il comportamento dei ratti per svolgere compiti cognitivi complessi. This protocollo generale fornisce un quadro per la formazione di ratti attraverso una varietà di compiti attualmente impiegati per la registrazione di correlati neurali di attenzione e di discriminazione visiva 1. Così, la proiezione Piano Maze è ottimizzato per le abilità visive di ratti e consente comparazioni più forti con compiti visivi negli esseri umani e nei primati non umani.
Protocollo
Tutte le procedure sono in conformità con le linee guida della Brown University Institutional Animal Care ed uso di commissione.
1. Panoramica dei sistemi
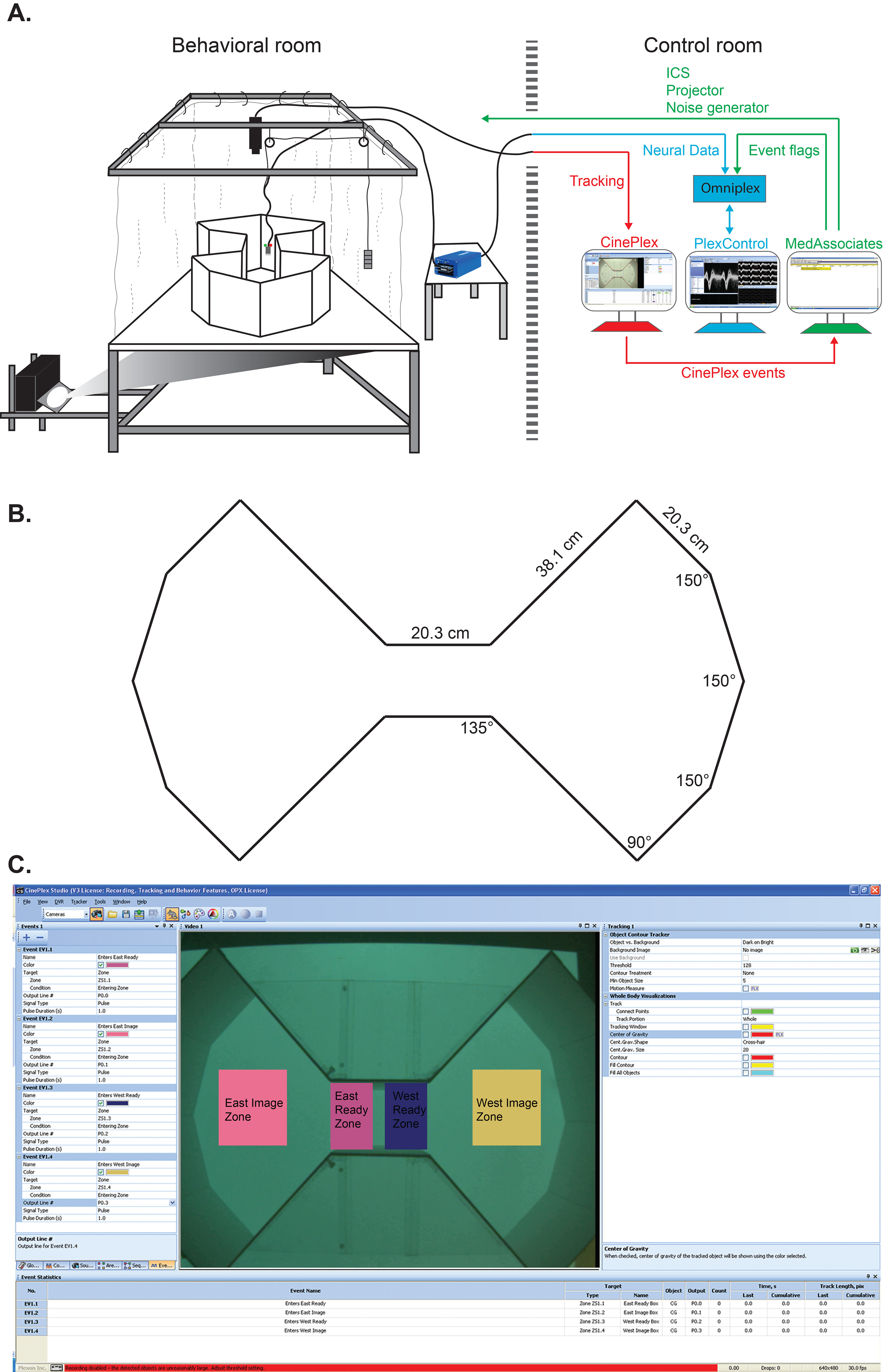
Un sistema di video tracking interagisce con un sistema di controllo comportamentale per monitorare i progressi del ratto in un determinato compito, valutare comportamenti target, presentazione dello stimolo di controllo e fornire ricompense basate sui progressi del ratto. Un sistema di registrazione elettrofisiologica vivo raccoglie i dati neurali per le analisi di eventi correlati. (Figura 1A).
- La proiezione Floor Maze
- La proiezione Piano Maze 2 è un campo aperto senza pareti (147,3 centimetri x 111,8 centimetri) con una chiara plexiglas incolore piano (spessore 0,6 cm). La parte inferiore del piano è un guadagno unitario Doppio Vision tessuto che è tesa su un secondo rettangolo di pezzi in plexiglas (147,3 centimetri x 111,8 centimetri x 1.25 cm) per la proiezione posteriore con una breve proiettore tiro.
- Collegare il proiettorealla scheda video nel PC comportamentale sistema. Tenere il plexiglas, tessuto schermo e proiettore utilizzando un telaio in alluminio anodizzato.
- Installare un telaio anodizzato in testa di montare una telecamera in testa e un sistema di pulegge per interfacciare le ICS e Headstage attacchi al ratto.
Nota: Collegare il telaio tenendo la Maze Piano di proiezione e telaio in testa per garantire la continuità elettrica e di terra al preamplificatore.
- Inseguimento Video
- Record, monitorare e analizzare i video in tempo reale con una sola telecamera in testa descritto al punto 1.2.2.
- Montare una fotocamera in testa (standard VGA, 80 fps) su un telaio in alluminio anodizzato in testa per monitorare il ratto
- Utilizzare sia diodi emettitori (LED) che ricoprono headstage del ratto per monitorare la posizione del ratto, o monitorare il baricentro del contorno del ratto con un sistema automatizzato di monitoraggio.
- Utilizzare il modulo Behavior Cineplex di base per analizzare i dati di posizione online e anche salvare il file di dati per ulteriori analisi offline.
Nota: Usiamo il Cineplex Behavioral Ricerca di Sistema 3.4.1 per la registrazione, il monitoraggio e l'analisi la posizione del ratto. Il modulo Cineplex di monitoraggio è utilizzato per il monitoraggio del ratto. Per un efficace monitoraggio dei progressi dell'animale, utilizzare il modulo Behavior Cineplex Basic per creare zone in uno spazio bidimensionale in posizioni rilevanti del labirinto che abbiano rilevanza nel compito. Le zone possono essere combinati in sequenze, e degli eventi logici Cineplex (come voci in zone e l'adempimento delle sequenze) sono assegnati in modo tale che, se il ratto soddisfa i criteri per l'evento, l'evento diventa vero. Assegnare eventi con uscite digitali e interfaccia tramite una scheda di ingresso superporto al sistema comportamentale.
- Un sistema di controllo comportamentale completamente automatizzato
- Arena di test comportamentali: utilizzare un'arena di prova a forma appropriata per il compito comportamentale sulla proiezione Piano Maze. Costruire la sonona utilizzando bianco opaco acrilico e posizionarlo direttamente sul piano di proiezione Maze.
Nota: Le dimensioni possono essere personalizzate per l'attività comportamentale utilizzato. Le pareti sono in genere 45-50 cm di altezza. Qui usiamo arene di test a doppia faccia (papillon labirinto 12) per massimizzare il numero di prove effettuate in una sessione (Figura 1B per le dimensioni del labirinto papillon). L'arena test ha quattro aree designate definite nel software di monitoraggio: nella zona orientale Immagine, West Area Immagine, un orientale Trial Pronto Area, e un pronto Area Ovest Trial (Figura 1C). - Sistema comportamentale: un sistema di interfaccia comportamentale controllato dal software MED-PC IV esegue programmi scritti in-house in MEDstate Notation (vedi appendice). Utilizzare gli eventi dal sistema comportamentale Cineplex per monitorare i progressi di un ratto durante il compito, controllare la presentazione dell'immagine, fornire segnali audio e consegnare ricompensa.
- Interfacciare la scheda di uscita superporto di ingresso digitale Omniplex per acquisire l'ora stverificarsi degli eventi comportamentali Amped l'ambiente software PlexControl per analisi offline. Eseguire segnali uditivi utilizzando un generatore audio programmabile.
Nota: gli eventi comportamentali da dell'apparato presentato qui possono operare le apparecchiature di terze parti (ad esempio laser per la stimolazione optogenetic) attraverso una scheda di trasferimento dati, se necessario. - Casa la scheda di uscita superporto, scheda di ingresso superporto e generatore audio programmabile in un armadio di interfaccia da tavolo. Interfaccia le carte con una scheda PCI DIG-704PCI-2 installato in un personal computer (PC) usando una scheda Decoder DIG-700F installato nell'armadio tavolo.
- Invia bipolari ICS onda quadra al ratto utilizzando un programmabile stimolazione intracranica sé stimolatore. Collegare l'unità stimolatore al PC tramite una scheda PHM152 COM. Parametri consigliati ICS: Pulse 1 e 2 Durata: 500 msec; Ritardo tra impulsi 1 e 2: 500 msec, Frequenza: 100 Hz.
Nota: la consegna ICSè automatizzato durante l'attività, ma possono essere forniti manualmente utilizzando una casella tasto programmabile interfacciato con un modulo SmartCtrl.
- Interfacciare la scheda di uscita superporto di ingresso digitale Omniplex per acquisire l'ora stverificarsi degli eventi comportamentali Amped l'ambiente software PlexControl per analisi offline. Eseguire segnali uditivi utilizzando un generatore audio programmabile.
- Arena di test comportamentali: utilizzare un'arena di prova a forma appropriata per il compito comportamentale sulla proiezione Piano Maze. Costruire la sonona utilizzando bianco opaco acrilico e posizionarlo direttamente sul piano di proiezione Maze.
- Neural sistema di acquisizione dati
- Assicurarsi che il sistema di proiezione Piano cornice Maze e ICS è messo a terra al preamplificatore del Omniplex Neural sistema di acquisizione dati per ridurre al minimo il rumore elettrico nelle registrazioni neurali.
- Contemporaneamente raccogliere i dati neurali, coordinate posizionali da Cineplex e bandiere comportamentali eventi dal sistema comportamentale nel file di dati per analisi offline.
2. Preparazione degli animali
- Animali
- Ottenere naïve 22 giorni vecchi ratti maschi a lungo Evans.
- Coppia ospitare i ratti e permettere loro di acclimatare al vivaio per una settimana.
- Maniglia ratti giorno per ~ 5 min.
- Una volta che i ratti raggiungono 250-275 g, iniziare programmi alimentari mantenendo le loro peso corporeo al 85-90% del loro peso alimentazione libera. Obiettivo noiiritti sono aumentati di 10 g / mese fino a ratti raggiungono 350 g.
- Casa singola ratti e continuare il programma di cibo per almeno una settimana prima di iniziare un intervento chirurgico per impiantare elettrodi di stimolazione e registrazione.
- Impianto chirurgico
Eseguire interventi chirurgici in condizioni di asepsi e secondo le linee guida istituzionali e regolamentari.- Anestetizzare topi con isoflurano.
- Fare un'incisione nel cuoio capelluto per rivelare il cranio per la pulizia e l'identificazione di bregma e lambda.
- Fai craniotomie alle coordinate relative.
- Fissare le viti di ancoraggio del cranio.
- Abbassare la punta di un elettrodo ICS nella MFB utilizzando le seguenti coordinate: antero-posteriore, -2,7 mm dal bregma, laterale, ± 1,8 millimetri; dorsoventral, -8.5 mm dalla superficie del cranio. Un secondo elettrodo ICS può essere impiantato nel emisfero come backup in caso di malfunzionamento dell'elettrodo.
- Fissare gli elettrodi ICS per tlui teschio e ancoraggio viti con cemento osseo. Non cementare il piedistallo (corpo plastico sull'elettrodo stimolante) degli elettrodi.
- Abbassare gli elettrodi di registrazione nel sito di interesse e fissare il dispositivo con cemento osseo.
- Posizionare il piedistallo ICS lontano dal dispositivo di registrazione e fissare gli elettrodi ICS e dispositivi di registrazione alle viti di ancoraggio con cemento osseo.
- Lasciare almeno sette giorni prima di iniziare il recupero assuefazione al protocollo shaping.
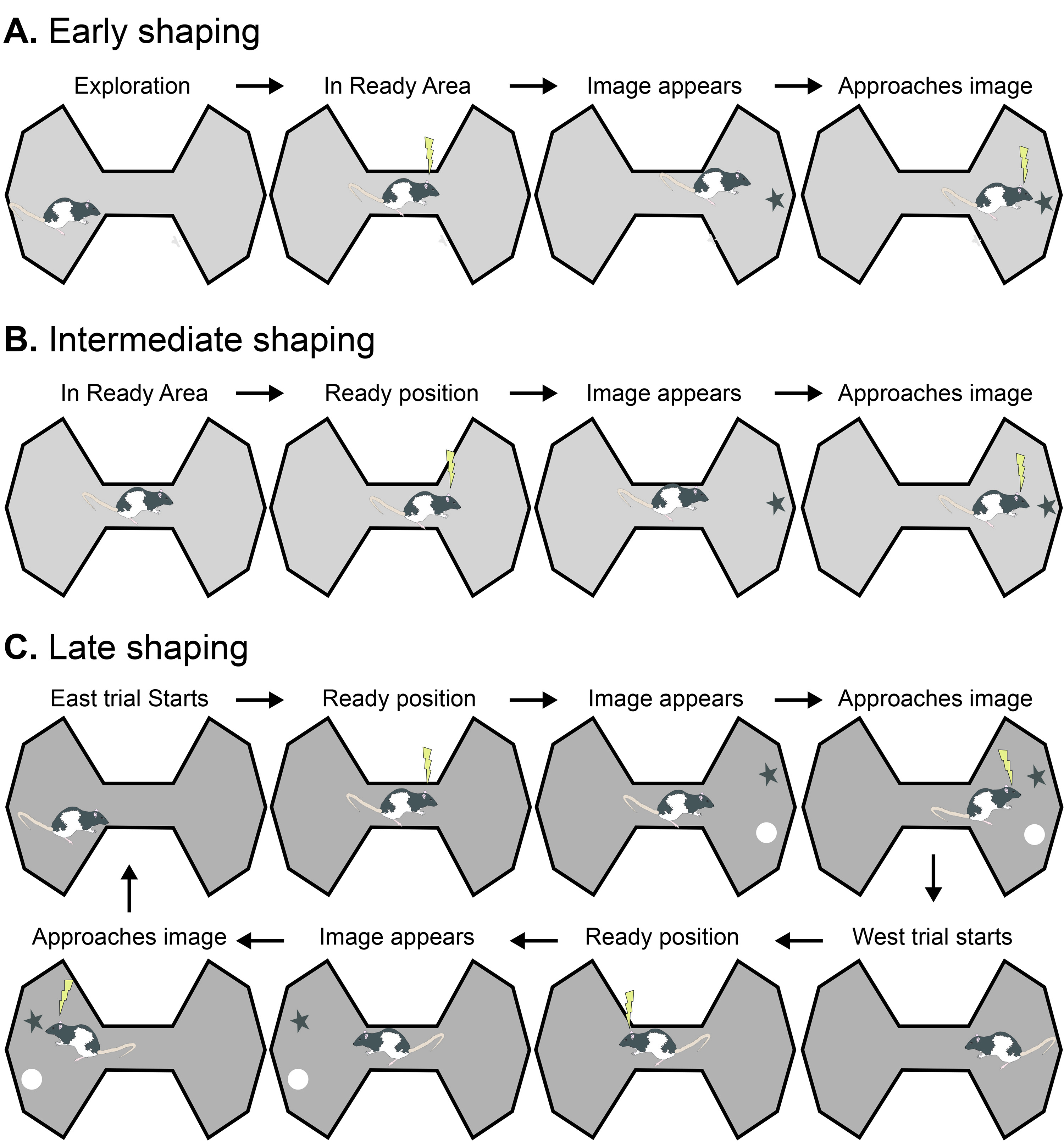
3. Shaping comportamentale: Generale Shaping compone di tre fasi: precoce, intermedio e tardivo Shaping (Figura 2).
Nota: L'obiettivo di sagomatura precoce e intermedia è quello di formare il ratto di mantenere un fermo 'posizione pronta' nella zona Disponibile per ogni prova, ed effettuare numerose prove in una sessione. Semi-automatizzare shaping comportamentale modo la formazione può essere adattata alle tariffe individuali di apprendimento di un ratto. Oncea ratto è il mantenimento di un successo 'posizione pronta', procedere al compito specifico di formatura (Late shaping) con l'obiettivo di trasferire il ratto su un protocollo completamente automatizzato per il controllo del comportamento preciso e imparziale (Figura 2).
- Sagomatura anticipata (Figura 2A)
- Giorno 1: abituare il ratto alla camera comportamentale per 10 min con l'apparecchio acceso per poi tornare alla colonia.
- Giorno 2: Ripetere il passaggio 1, quindi abituare l'animale per l'arena di prova per 10 min.
- Giorno 3: Collegare i ICS e attacchi Headstage al ratto, e abituare il ratto per l'arena di prova per 10 min.
- Giorno 4: Determinare l'ampiezza ICS più basso di stabilire una preferenza luogo utilizzando un protocollo preferenza condizionata posto informale. Titolare Pulse 1 e 2 ampiezze. Valori di ampiezza tipici sono 20-80 μA.
- Dal giorno 5: Consegnare ICS ricompensa per addestrare i topi ad associare la zona Ready e presentazioni est e ad ovest di immagine con ICS ricompensa. Continuare fino a quando il ratto si alterna tra Oriente e Occidente aree delle immagini.
- Sagomatura intermedio (Figura 2B).
- Introdurre rumore bianco (50 dB) per segnalare l'inizio di un processo. Spegnere il rumore bianco quando il topo entra nella zona Ready.
- Automatizzare la consegna ICS per l'ingresso nello spazio Ready, e per il completamento di successo «posizioni ready. Regolare la probabilità di ICS consegna all'ingresso e di successo 'posizione pronta' a rinforzare il comportamento.
Nota: Regolare le probabilità di ricompensa manualmente in base alle prestazioni del ratto individuo durante plasmare. Diminuire le probabilità di ricompensa per l'ingresso nella zona Ready e mantenere posizioni pronti successo. Probabilità finale consigliato di ricompensa per l'adempimento di successo "posizioni ready è del 5-10%. I ratti sono premiati per tutte le scelte corrette. - Inizia con brevi periodi "posizione pronto" (es. 200 msec). Aumentare gradualmente la dura 'posizione pronta'zioni in 100 passi msec.
- Accendere il rumore bianco se il ratto rompe prematuramente la 'posizione pronta' in modo che il topo ha per riavviare il processo.
- Spostarsi tardo shaping quando ratto è in possesso nella 'posizione pronto' per un massimo di 1.200 msec.
- Tardo shaping (Figura 2C).
Nota: Formazione nella tarda sagomatura è specifica per l'attività in cui il ratto si esibiranno. Automatizzare la formazione in questa fase di formatura per un controllo preciso e imparziale di tutti i parametri di attività, ma mantenere la flessibilità necessaria per fornire manualmente ricompense ICS. Sono descritti i protocolli di formazione per i due compiti.- Discriminazione bicondizionale visiva (vBCD) task: Utilizzare stimoli visivi distinti per addestrare i ratti in una forma semplice e luminanza discriminence.
- Inizia il processo accendendo il rumore bianco.
- Casualmente imporre la 'posizione pronta "latenze di 700 - 1.200 msec.
- Consegnare ICS manualmente, se necessario, di rafforzare il successo 'po prontosizioni ».
- Presentare una coppia di immagini nell'area di presentazione dell'immagine. Pseudorandomly presentare l'immagine corretta sul lato sinistro o destro dell'area dell'immagine.
- Consegnare ICS per una risposta corretta e cancellare il pavimento. Una risposta corretta è registrato quando il topo entra nella zona in cui si trova l'immagine corretta. Il primo giorno di allenamento solo, emettere un burst 75 dB di rumore bianco come deterrente per una risposta non corretta.
- Emettere un processo di correzione dopo un processo corretto. Studi di correzione hanno parametri identici (lato sinistro o destro e latenza 'posizione pronta') come il precedente processo corretto.
- Una volta che i ratti sono in grado di eseguire con successo la semplice discriminazione, introdurre i diversi modelli piano per addestrare la regola di non discriminazione bicondizionale.
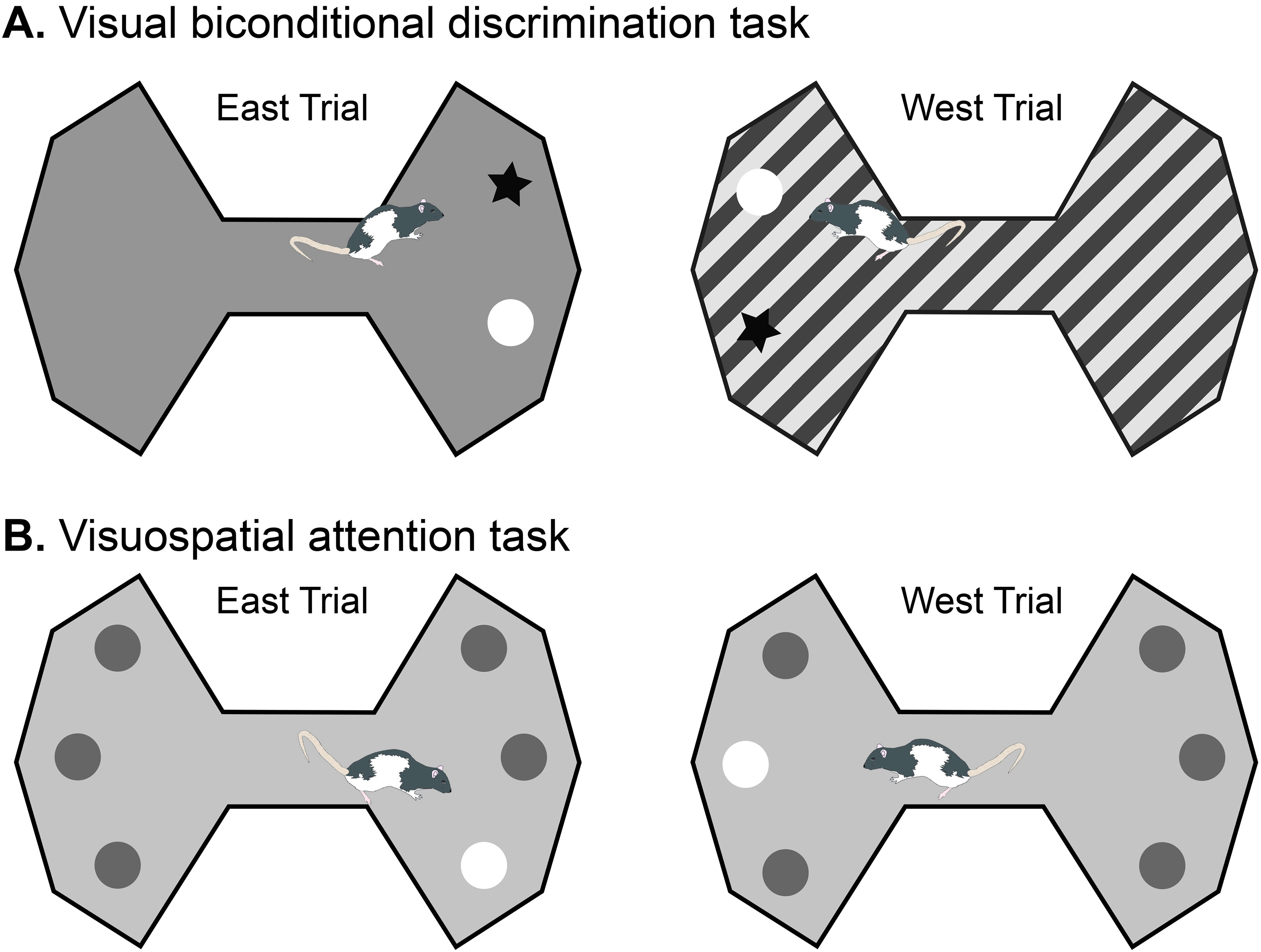
- Presentare una nuova coppia di immagini e due schemi pavimento distinti per servire come contesto. L'immagine corretta è subordinata al modello di piano, ad esempio, la stazione neror è corretto quando il pavimento è grigio e il cerchio bianco è corretto quando il pavimento è a righe (Figura 3C).
- Pseudorandomly assegnare il modello di piano e la posizione (sinistra o destra) dell'immagine corretta per ogni prova garantire che le prove sono controbilanciati.
- Implementare studi di correzione dopo un processo corretto in cui i parametri di prova sono identici al processo precedente.
- Attenzione visuo-spaziale (VSA) compito: Presente cerchi bianchi illuminati in posizioni spaziali definite in campo per addestrare i ratti ad avvicinarsi alla posizione spaziale del cerchio di destinazione.
Nota: Per questo compito l'arena ha cerchi grigi in diverse posizioni spaziali in Oriente e Occidente aree delle immagini. Dopo il successo 'posizione pronta', il cerchio di destinazione si accende (diventerà bianca), e il ratto deve avvicinarsi a quella posizione di destinazione (Figura 3B).- Casualmente imporre latenze «posizione pronto" di 1,000-1,600 msec su una prova del periodo di prova.
- Consegnare ICS manualmente, se necessario, di rafforzare successo "posizioni ready.
- Dopo il completamento della 'posizione pronta', casualmente illuminare uno dei cerchi grigi.
- Invia ICS quando il topo entra nella zona del cerchio illuminato.
- Spegnere l'illuminazione e cominciare il prossimo processo sul lato opposto (est o ovest) lato.
- All'inizio del tardo shaping, illuminare il cerchio fino ratto avvicina o fino al processo termina (5 sec dopo che illumina il cerchio). Punteggio ogni prova come sia corretto o un processo omissione. Per gli studi omissione, illuminare l'intero piano (pavimento bianco presentato) e nessuna ricompensa sarà disponibile fino alla prova successiva.
- Quando le prestazioni del ratto raggiunge l'80% corretto, diminuire la quantità di tempo che il cerchio rimane illuminato per 1 sec. Il ratto ha 5 secondi per fare una scelta.
- Non premiare per le prove corrette. Avviare la prova successiva.
- Se un tri un'omissioneal, illuminare il pavimento e iniziare un nuovo processo.
- A 80% corretta diminuire ulteriormente il tempo del cerchio bersaglio è illuminato a 500 msec.
- Scegli le località di destinazione in modo casuale prima di ogni prova. Il ratto continuerà ad avere 5 secondi per fare una scelta prima di tutto il piano si illumina per segnalare la fine di quel processo.
- Non premiare per le prove non corretti o omissione. Il ratto deve avviare un nuovo processo sul lato opposto dell'arena.
- Nota: i cerchi supplementari possono essere aggiunti in ogni Area Immagine per aumentare ulteriormente la difficoltà del compito.
- Discriminazione bicondizionale visiva (vBCD) task: Utilizzare stimoli visivi distinti per addestrare i ratti in una forma semplice e luminanza discriminence.
Risultati
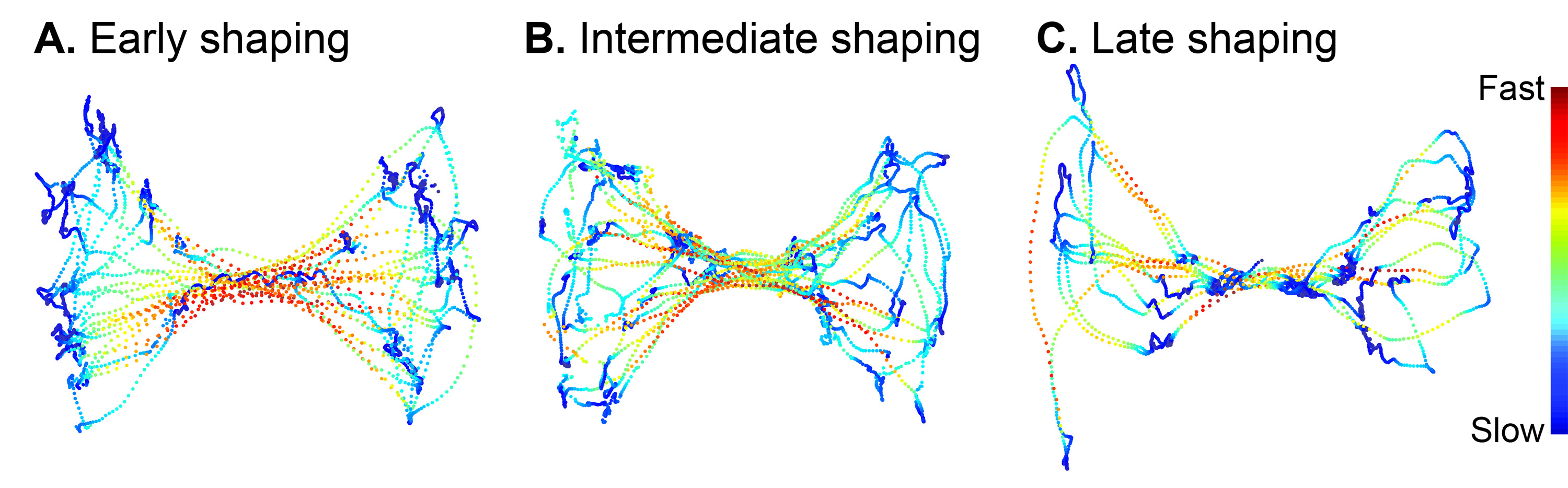
L'obiettivo delle operazioni generali di sagomatura è di acclimatare il ratto all'arena di test, addestrare il ratto di rimanere in un fermo 'posizione pronta' per la presentazione degli stimoli visivi di destinazione, e avvicinarsi alla posizione dello stimolo visivo corretto. Dopo assuefazione alla sala prove, arena, e un attacco, sagomatura anticipata richiede in genere 100-150 prove fino a quando i topi si alternano tra i lati est e ovest del campo. Durante anticipata plasmare i ratti in genere eseguite attraverso l'Area Pronto nel centro dell'arena e trascorrono la maggior parte del tempo ad esplorare il perimetro dell'arena (Figura 4A). Ratti in fase di formatura intermedia imparano gradualmente a mantenere un fermo 'posizione pronta' nella zona di Pronto richiedono 600-700 prove. A questo punto, i percorsi animali sono stereotipati loop dalla zona Pronto allo Spazio Immagine con meno tempo speso ad esplorare il perimetro del labirinto. Tuttavia, i ratti non sono il mantenimento di un fermo 'po prontozione ', indicata dalla velocità alla quale i ratti attraversano il centro Pronto Area (Figura 4B).
Entro la fine di plasmare Intermediate, ratti mantenere un fermo 'posizione pronta' nella zona di pronta prima di avvicinarsi stimolo visivo bersaglio. Il ratto avvia quindi il successivo processo sul lato opposto dell'arena (Figura 4C).
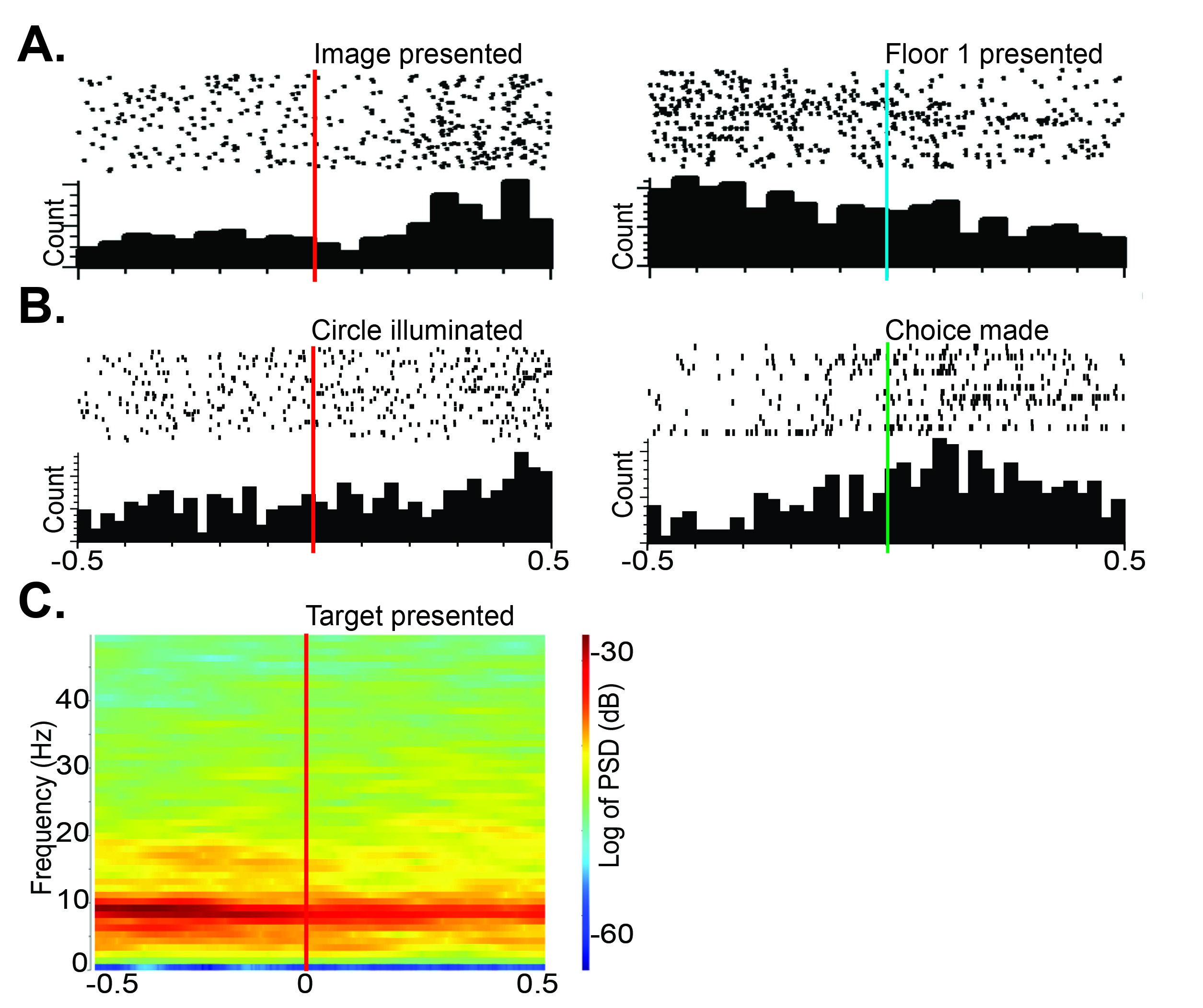
L'integrazione del software di monitoraggio e il sistema di acquisizione dati neurale con un sistema di controllo comportamentale consente analisi di eventi di dati correlati neurali. Schiere di elettrodi pilotabili possono essere posizionati strategicamente per registrare single-unit e ambito locale potenziale attività. Le registrazioni sono state effettuate in corteccia postrhinal quando i ratti hanno svolto il compito vBCD. Istogrammi Perievent e trame raster dimostrano che le cellule nella corteccia postrhinal rispondono alla comparsa dello stimolo visivo bersaglio e alla comparsa del pattern pavimento (Figura 5A). Nella corteccia parietale posteriore di rats effettuare le cellule compito VSA rispondono alla presentazione dell'immagine, e quando la scelta è stata effettuata inserendo la zona che definisce l'immagine di destinazione (Figura 5B). Campo locale potenziale attività nella corteccia parietale posteriore durante la prestazione nel compito VSA mostra forte potere nella gamma theta (~ 8 Hz), quando i ratti sono in posizione 'pronto' prima della presentazione dell'immagine (Figura 5C).

Impostazione Figura 1. Sperimentale. A. schematica delle camere comportamentali e di controllo. La proiezione Floor Maze è alloggiato nella camera comportamentale. I ratti sono monitorati tramite una telecamera in testa. La sala di controllo ospita le apparecchiature per controllare l'attività e per raccogliere i dati neurali. B. Dimensioniil papillon labirinto. C. Screen capture di Cineplex Studio. Zone sono definite dall'utente. Eventi logici vengono inviati come uscite digitali Cineplex al sistema di controllo comportamentale (Med Associates) per monitorare l'andamento del ratto. Clicca qui per vedere l'immagine ingrandita.
{kind=link}

Figura 2. Schematica delle fasi di formatura. A. Ai primi di plasmare il ratto riceve ICS per entrare nella zona Pronto, e che entrano Oriente e Occidente aree delle immagini. L'obiettivo è quello di formare il ratto di associare queste aree con ICS ricompensa. Shaping B. intermedia si concentra sulla formazione dei ratti di mantenere un fermo 'posizione pronta' nella zona Ready. Le immagini sono presentate only dopo il mantenimento di un successo 'posizione pronta'. I ratti continuano a ricevere ICS per avvicinarsi l'immagine nella zona immagine. C. A tarda shaping, il ratto sta mantenendo con successo un fermo 'posizione pronta'. La formazione è compito specifico, e il ratto è addestrato per imparare le regole specifiche per svolgere un determinato compito. Fulmine indica consegna ICS. Clicca qui per vedere l'immagine ingrandita.
{kind=link}

Figura 3. A. Schema del compito vBCD Quando il pavimento è grigio, la stella nera viene premiata,.. Quando il pavimento è a strisce, il cerchio bianco viene premiato B. Schema del compito VSA. Cerchi grigi indicano i luoghi di destinazione nelle aree della fotografia.Lo stimolo bersaglio è una breve (500 msec) illuminazione (bianco) di uno dei cerchi. I ratti sono premiati per affrontare il percorso di destinazione corretta. Clicca qui per vedere l'immagine ingrandita.
{kind=link}

Figura 4. Percorsi esempio durante le plasmare dati. Posizione da due segmenti di un topo esibendosi in diverse fasi di formatura minuto. Velocità dell'animale è rappresentato dalla mappa di calore. Colori freddi rappresentano velocità più lenta e colori caldi rappresentano più rapida velocità. A. Durante anticipata plasmare ratti esplorare e posteriori sulle pareti esterne delle aree dell'immagine Oriente e Occidente e non si fermano al Pronto Area. B. Un percorso stereotipato inizia ad emergere in sh Intermediatescimmiottamento. Percorsi formare un anello verso le aree della fotografia di nuovo alla zona Ready. Ratti cominciano a mantenere con successo un 'posizione pronta' in. C. Pronto Area. Quando i ratti progressi sul Tardo shaping, ratti mantengono stazionarie "posizioni pronti 'ei percorsi dei ratti sono più stereotipato. Clicca qui per vedere l'immagine ingrandita.
{kind=link}

Figura 5. Esempi di analisi perievent correlati A.. Cellule registrati dalla corteccia postrhinal durante il compito vBCD con risposte diverse alla presentazione dell'immagine di destinazione (a sinistra), e la presentazione del piano (a destra). B. Le cellule registrati dalla corteccia parietale posteriore duranteil compito VSA con risposte diverse all'illuminazione del cerchio (a sinistra). Aumento della cottura dopo aver scelto la posizione spaziale in cui il cerchio bersaglio illuminato (a destra). C. Spettrogramma mostra forte potere theta nella corteccia parietale posteriore durante la 'posizione pronta'. La linea rossa verticale indica la fine del successo 'posizione pronta' e la presentazione delle immagini. La linea blu verticale indica la presentazione del Piano 1 al processo inizia nel compito vBCD. La linea verticale verde indica che una scelta è stata registrata nel compito VSA. Clicca qui per vedere l'immagine ingrandita.
{kind=link}
Discussione
Descriviamo formalmente i protocolli di formare ratti in compiti cognitivi completamente automatizzati complessi visivi sulla proiezione Piano Maze. La proiezione Floor Maze è stato utilizzato con successo per stabilire correlati neurali di congiunzioni oggetto-locazione e segnali di errore nella corteccia postrhinal durante la performance su un 2-scelta compito di discriminazione visiva 1.
Il protocollo comportamentale sagomatura è progettato per essere flessibile in modo che possa essere adattata a tasso di apprendimento di un singolo topo. Codice personalizzato scritto per il sistema comportamentale permette lo sperimentatore di controllare la probabilità di automazione ICS consegna a passaggi critici durante la formazione, ad esempio, la formazione della 'posizione pronta'. Il codice dovrebbe inoltre consentire la consegna manuale di ICS utilizzando una casella pulsante programmabile durante. L'obiettivo di sagomatura precoce è quello di stabilire la stimolazione ICS efficace per la consegna ricompensa per rinforzare il comportamento. Quando possibile si consiglia di impiantare stiFormulazione di elettrodi bilateralmente in MFB in caso di stimolazione inefficace in un emisfero. La nostra esperienza, tuttavia, è che quasi tutti gli elettrodi impiantati ICS sono stati funzionali a fornire uno stimolo gratificante. La fase di formatura intermedia è fondamentale per la formazione del ratto di mantenere una 'posizione pronta' nella zona Ready. Nel 'posizione pronta', il ratto deve essere ferma con il naso rivolto verso le aree dell'immagine in cui verranno presentate le immagini di scelta. La 'posizione pronta' controlla quando compaiono le immagini, la direzione dalla quale il ratto avvicina le immagini e la distanza da cui il ratto vede le immagini. Si consiglia di LED di localizzazione montati sul headstage del topo per monitorare la direzione in cui la testa del topo sta puntando per un migliore controllo del comportamento e un controllo più preciso della presentazione dell'immagine di destinazione. Consegna manuale di ICS può essere rilasciato per addestrare i ratti per mantenere l'appropriato 'posizione pronta & #8217;. Quando il ratto è il mantenimento di soddisfacenti "posizioni pronte" in ogni prova, la formazione in tarda sagomatura è compito specifico. Nel tardo shaping ratti sono addestrati per imparare le regole specifiche per svolgere un determinato compito.
Usiamo ICS come nostro metodo di consegna ricompensa in quanto questo metodo fornisce un feedback immediato al topo con conseguente apprendimento più veloce durante la sagomatura del comportamento, e più ha completato le prove in una sessione nella raccolta dei dati neurali nel compito automatizzata. Consegna ICS, tuttavia, provoca artefatti elettrici nelle registrazioni neurali, e può essere problematico per analizzare LFP continuo o dati multiunit. L'intervallo intorno al manufatto elettrico può essere rimosso in linea dal file di dati di registrazione neurale prima dell'analisi continua dei dati. Manufatti stereotipati da ICS a Pass dati filtrati alto picco possono essere facilmente rimossi offline senza influire picco di singolo analisi. Ottimizzazione futuro dei protocolli per la proiezione Piano Maze include l'utilizzo di optogenstrumenti per fornire etic premio interno per minimizzare ed eliminare artefatti dovuti stimolazione elettrica.
La proiezione Floor Maze è ottimizzato per le capacità visive di ratti ed è quindi più adatto per compiti comportamentali guidate visivamente. Va notato che i confronti diretti non può essere fatta tra paradigmi sperimentali nel labirinto Piano di proiezione e di camere operante a causa di diversi protocolli sperimentali impiegati e le diverse definizioni di criteri per l'acquisizione di successo di un determinato compito. Abbiamo precedentemente dimostrato, tuttavia, che i topi acquisito un semplice compito di discriminazione visiva 2-scelta ~ 50 trial in proiezione Piano Maze 2 rispetto a> 300 prove in altri studi in cui le immagini sono state presentate in verticale in camere operante 3,10. Il compito VSA è stato modellato dopo il classico 5-scelta compito reazione di serie 13 (5-CSRT) disegnato per valutare dell'attenzione visivaprocessi. Tipicamente il 5-CSRT avviene in una camera operante e richiede l'animale a fare un poke naso nel foro naso-Poke appropriato indicato da un lampo di luce; qui il compito VSA è effettuata in un'arena aperta dove gli animali devono rimanere fermo in una posizione specifica in campo, dirigere la loro attenzione ai luoghi di destinazione e attendere lo stimolo della luce appaia. Nella nostra esperienza, ratti tenuti ~ 3.200 prove raggiungere criterio (75% in due giorni consecutivi) in 5-CSRT 14 rispetto a ~ 800 prove nel compito VSA nella proiezione Piano Maze.
Un altro vantaggio di compiti comportamentali effettuate sulla proiezione Piano Maze è che i compiti sono eseguiti in una grande arena aperta, che sfrutta la naturale tendenza del ratto di esplorare il suo ambiente, al contrario di compiti che richiedono l'animale a fissare lo sguardo verso un bersaglio fermo. Uno dei principali vantaggi di utilizzare ratti liberi di muoversi in un'arena aperta &# 160; nell'apparato Maze Piano di proiezione è che l'informazione territoriale sia allocentrica ed egocentrica può essere raccolto con le informazioni visive. Un altro vantaggio del nostro paradigma è che i compiti non devono limitarsi alla presentazione di immagini statiche. Posizione e caratteristiche di stimoli visivi che sono dinamiche possono essere utilizzati in operazioni future. Utilizzando le funzionalità di tracciamento del Cineplex Behavioral Ricerca di Sistema, le attività possono essere sviluppate per una comprensione funzionale più dettagliata di una determinata struttura del cervello. La combinazione di registrazioni elettrofisiologiche simultanee con compiti cognitivi guidati visivamente, questioni fondamentali come l'attività cerebrale è legata ai processi cognitivi, quali il processo decisionale e discriminazione visiva possono essere esplorati.
Utilizzando le procedure guidate visivamente, i risultati di studi effettuati su ratti possono essere meglio tradotti agli esseri umani, con l'obiettivo finale di fornire terapie per le malattie cognitive umane.
Divulgazioni
Tassa di presentazione per questo video-articolo è sponsorizzato da Plexon Inc.
Riconoscimenti
Questo lavoro è stato supportato da NSF IOS 1146334, NSF EFRI 0937848, DARPA N66001-10-C-2010 e NSF IOS 0.522.220 a RDB. Ringraziamo Stacie Hyatt at Plexon Inc per l'assistenza nella preparazione di questo manoscritto.
Materiali
| Name | Company | Catalog Number | Comments |
| OmniPlex D Neural Data Acquisition System | Plexon Inc | ||
| DigiAmp Digitizing Amplifier | Plexon Inc | ||
| Frame for Floor Projection Maze | 80/20 Inc | 15 Series T-slot framing | |
| Short throw projector | NEC Display Solutions | WT610E | |
| Da-Lite lace and grommet screen | Da-Lite Screen Company | 81326C | |
| Plexiglas | Modern Plastics | ||
| SuperPort Input card | Med Associates Inc | DIG-713A | |
| SuperPort Output card | Med Associates Inc | DIG-726 | |
| SmartCtrl Interface module | Med Associates Inc | DIG-716B | |
| Decoder card | Med Associates Inc | DIG-700F | |
| PCI card | Med Associates Inc | DIG-704PCI-2 | |
| Programmable audio generator | Med Associates Inc | ANL-926 | |
| Programmable Intracranial Self Stimulation Stimulator | Med Associates Inc | PHM-150B | Operated by a PHM-152COM card |
| 2 Channel electrode | Plastics1 | MS303/13/SP | Cut 15-20 mm below the pedestal |
| MED-PC IV Software | Med Associates Inc | SOF-735 | |
| OmniPlex Software | Plexon Inc | ||
| CinePlex Software: Tracking and Basic Behavior Modules | Plexon Inc |
Riferimenti
- Furtak, S. C., Ahmed, O. J., Burwell, R. D. Single neuron activity and theta modulation in postrhinal cortex during visual object discrimination. Neuron. 76, 976-988 (2012).
- Furtak, S. C., et al. The Floor Projection Maze: A novel behavioral apparatus for presenting visual stimuli to rats. J. Neurosci. Methods. 181, 82-88 (2009).
- Bussey, T. J., et al. The touchscreen cognitive testing method for rodents: how to get the best out of your rat. Learn. Mem. 15, 516-523 (2008).
- Bussey, T. J., Muir, J. L., Everitt, B. J., Robbins, T. W. Triple dissociation of anterior cingulate, posterior cingulate, and medial frontal cortices on visual discrimination tasks using a touchscreen testing procedure for the rat. Behav. Neurosci. 111, 920-936 (1997).
- Forwood, S. E., Bartko, S. J., Saksida, L. M., Bussey, T. J. Rats spontaneously discriminate purely visual, two-dimensional stimuli in tests of recognition memory and perceptual oddity. Behav. Neurosci. 121, 1032-1042 (2007).
- Gaffan, E. A., Eacott, M. J. A computer-controlled maze environment for testing visual memory in the rat. J. Neurosci. Methods. 60, 23-37 (1995).
- Keller, J., Strasburger, H., Cerutti, D. T., Sabel, B. A. Assessing spatial vision - automated measurement of the contrast-sensitivity function in the hooded rat. J. Neurosci. Methods. 97, 103-110 (2000).
- Lashley, K. S. The mechanism of vision V The structure and image-forming power of the rat's eye. J. Comp. Psychol. 13, 173-200 (1932).
- Lashley, K. S. The Mechanism of Vision: Xv. Preliminary Studies of the Rat's Capacity for Detail Vision. J. Gen. Psychol. 18, 123-193 (1938).
- Minini, L., Jeffery, K. J. Do rats use shape to solve "shape discriminations". Learn. Mem. 13, 287-297 (2006).
- Milner, P. M. Brain-Stimulation Reward - a Review. Can. J. Psychol. 45, 1-36 (1991).
- Albasser, M. M., et al. New behavioral protocols to extend our knowledge of rodent object recognition memory. Learn. Mem. 17, 407-419 (2010).
- Bari, A., Dalley, J. W., Robbins, T. W. The application of the 5-choice serial reaction time task for the assessment of visual attentional processes and impulse control in rats. Nat. Protoc. 3, 759-767 (2008).
- Agster, K. L., Burwell, R. D. Structure and function of the rodent postrhinal cortex: comparisons to other cortical regions. , (2007).
Ristampe e Autorizzazioni
Richiedi autorizzazione per utilizzare il testo o le figure di questo articolo JoVE
Richiedi AutorizzazioneThis article has been published
Video Coming Soon
Personale delle biblioteche
Copyright © 2025 MyJoVE Corporation. Tutti i diritti riservati