
Method Article
Tarefas cognitivas Visuais automatizadas para gravação Atividade Neural Usando uma projeção Piso Labirinto
Neste Artigo
Resumo
Descrevemos os protocolos para treinar ratos para registros eletrofisiológicos crônicas em tarefas cognitivas totalmente automatizados em uma projeção Piso Maze.
Resumo
Tarefas neuropsicológicos utilizados em primatas para investigar os mecanismos de aprendizagem e memória são normalmente guiados visualmente tarefas cognitivas. Nós desenvolvemos tarefas cognitivas visuais para os ratos usando a projeção Piso Labirinto 1,2 que são otimizados para habilidades visuais de ratos, permitindo comparações mais fortes de resultados experimentais com outras espécies.
A fim de investigar os correlatos neurais da aprendizagem e memória, nós integramos registros eletrofisiológicos em tarefas cognitivas totalmente automatizados na projeção Piso Labirinto 1,2. Software Behavioral interface com um sistema de rastreamento de animais permite o monitoramento do comportamento do animal, com controle preciso de apresentação de imagem e recompensar contingências para os animais mais bem treinados. Integração com um sistema in vivo gravação eletrofisiológico permite exame de correlatos comportamentais de atividade neural em épocas selecionadas de uma determinada tarefa cognitiva. </ P>
Descrevemos os protocolos para um sistema modelo que combina apresentação visual automatizada de informações para roedores e recompensa intracraniana com abordagens eletrofisiológicas. Nosso sistema de modelo oferece um conjunto sofisticado de ferramentas como uma estrutura para outras tarefas cognitivas para melhor isolar e identificar os mecanismos específicos que contribuam para determinados processos cognitivos.
Introdução
Tarefas visuais são comumente usados em estudos em humanos e macacos para examinar mecanismos de aprendizagem subjacente e de memória. Modelos de roedores, no entanto, são mais facilmente acessível a pesquisadores de maior escala, os estudos melhor controlados, e tem a vantagem adicional de permitir técnicas eletrofisiológicas mais invasivos. Em combinação com outras abordagens, tais como as manipulações genéticas, registros eletrofisiológicos em ratos movendo-se livremente fornecer um modelo útil para orientar precisamente os mecanismos e circuitos de processos cognitivos subjacentes. Tarefas visuais Primate exigem os assuntos a dirigir o olhar para estímulos visuais em um monitor, enquanto que as tarefas de ratos exigem os assuntos de interagir com um ambiente. A projeção Piso Labirinto utiliza a tendência natural de ratos para explorar ativamente o ambiente, ao mesmo tempo assistir a estímulos visuais.
Tarefas cognitivas que utilizam aparelhos touchscreen projetados especificamente para roedores têm permitidomelhor tradução dos resultados de modelos de roedores para os humanos 3. Touchscreen tarefas são tipicamente realizadas numa câmara com dois estímulos visuais tridimensionais apresentados verticalmente nas paredes 3-7. Estas tarefas touchscreen exigem o assunto para trás para o estímulo visual alvo e quebrar um photobeam infravermelho ou imprensa sobre uma almofada de pressão para registrar sua resposta. Evidências anatômicas e comportamentais, entretanto, sugerem que os ratos processar a informação visual no hemicampo visual inferior de forma mais eficaz para orientar o comportamento 8-10. Nosso laboratório desenvolveu tarefas cognitivas que utilizam a projeção Piso Maze 2 em que estímulos visuais bidimensionais são projetadas de volta para o chão da arena de teste. Na projeção Piso Maze ratos podem ser rastreados ao executar tarefas em uma grande arena aberta em comparação com aparelhos de tela sensível ao toque. Assim, a informação espacial na actividade neuronal gravados podem ser obtidas, além de correlatos neurais de uma informação visualtomada de decisão d.
Nós entregamos estimulação intracraniana (ICS) para o pacote prosencéfalo medial (MFB) como recompensa 11. Este método de entrega recompensa tem vantagens sobre alimentos e bebidas recompensas. Comida e bebida recompensas podem levar à saciedade, mesmo em ratos privados de alimento, o que limita o número de tentativas de um animal irá executar e, potencialmente, retardando o processo de treinamento. ICS oferece recompensa instantânea fornecer feedback imediato sobre o desempenho da tarefa. Os resultados recompensa imediata na concepção mais rápido e aquisição e reduz substancialmente a duração de protocolos de treinamento. Além disso, um maior número de ensaios pode ser feito em uma sessão, o aumento da quantidade de dados recolhidos e resultando em uma amostra mais fiável do comportamento relacionado com a tarefa.
Usando o Labirinto Piso Projeção, vamos descrever um protocolo geral para moldar o comportamento de ratos para executar tarefas cognitivas complexas. This protocolo geral fornece uma estrutura para a formação de ratos através de uma variedade de tarefas atualmente empregados para a gravação de correlatos neurais da atenção e discriminação visual 1. Assim, a projeção Piso Labirinto é otimizado para habilidades visuais de ratos e permite comparações mais fortes com tarefas visuais em humanos e primatas não-humanos.
Protocolo
Todos os procedimentos estavam de acordo com as diretrizes do Comitê Brown University Animal Care Institucional e uso.
1. Visão geral de Sistemas
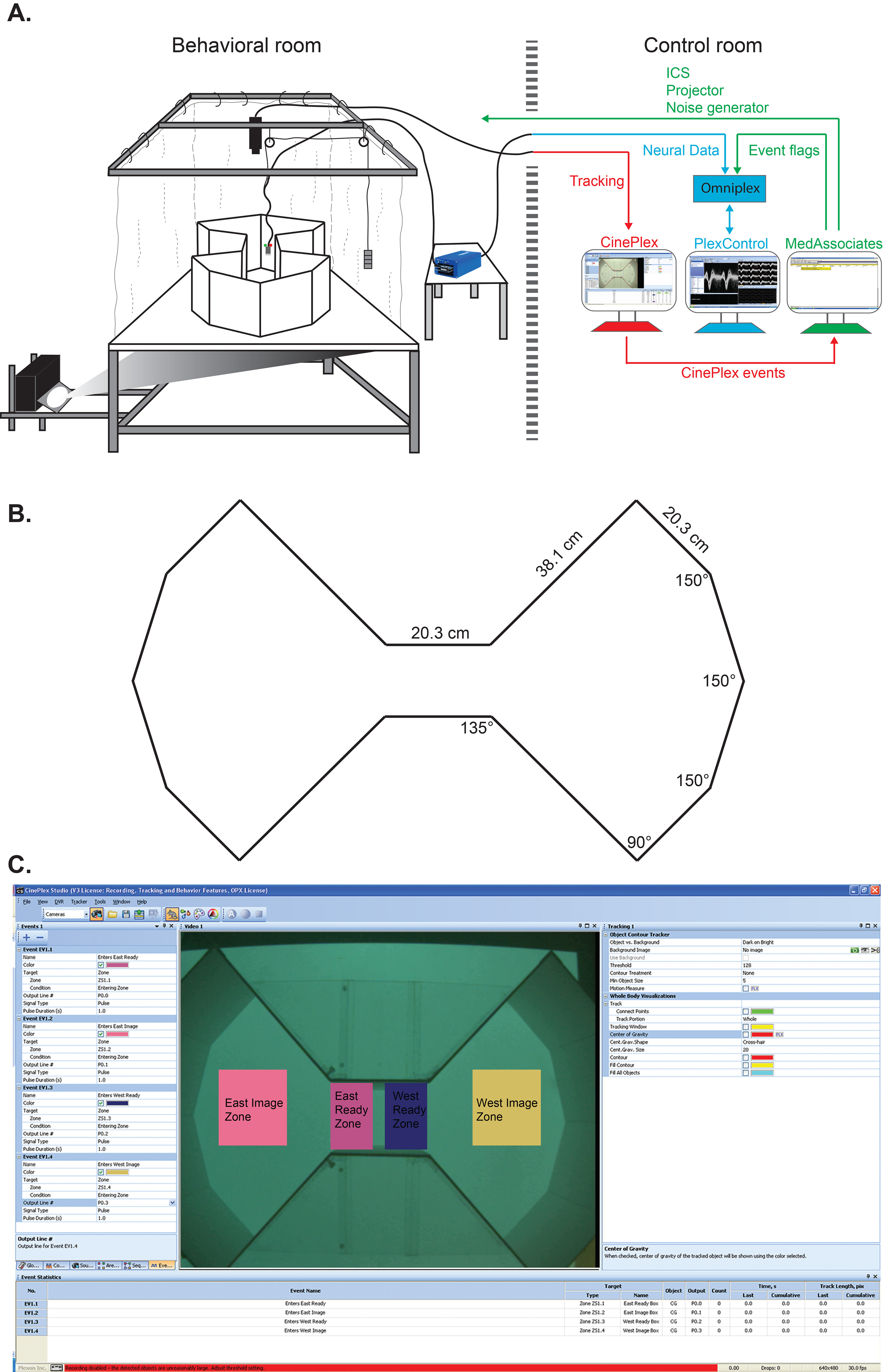
Um sistema de monitoramento de vídeo interage com um sistema de controle comportamental para monitorar o progresso do rato em uma determinada tarefa, avaliar comportamentos alvo, controle de apresentação do estímulo e oferecer recompensas com base no progresso do rato. Um sistema de gravação eletrofisiológico vivo coleta dados neurais para análise de eventos relacionados. (Figura 1A).
- A projeção Piso Labirinto
- A projeção Piso Maze 2 é um campo aberto, sem paredes (147,3 centímetros x 111,8 centímetros), com um piso de acrílico transparente e incolor (0,6 cm de espessura). A parte inferior do piso é um ganho unitário ecrã duplo Visão tecido que é esticado sobre um segundo retângulo de peças de acrílico (147,3 centímetros x 111,8 centímetros x 1,25 centímetros) de projeção traseira usando um short projetor arremesso.
- Conecte o projetorpara a placa de vídeo no sistema PC comportamental. Segure o Plexiglas, tecido de tela e projetor usando uma moldura de alumínio anodizado.
- Instalar um quadro anodizado sobrecarga para montar uma câmera em cima e um sistema de roldanas para fazer a interface do ICS e headstage amarras ao rato.
Nota: Conecte o quadro que guardara o labirinto Piso projeção e quadro aéreo para garantir a continuidade elétrica e solo para o pré-amplificador.
- Monitoramento de vídeo
- Record, acompanhar e analisar vídeos em tempo real, com uma única câmera em cima descrito na etapa 1.2.2.
- Montar uma câmera aérea (padrão VGA, 80 fps) em uma moldura de alumínio anodizado em cima para monitorar o rato
- Use quer diodos emissores de luz (LEDs), ligados ao andar de entrada do rato para determinar a posição do rato, ou controlar o centróide do contorno do rato com um sistema de seguimento automático.
- Use o módulo Comportamento Cineplex Basic para analisar os dados de posição online e também salvar o arquivo de dados para posterior análise offline.
Nota: Usamos o Cineplex Behavioral Research System 3.4.1 para gravação, monitoramento e análise de posição do rato. O módulo Cineplex O rastreamento é usado para rastrear o rato. Para o rastreamento do progresso do animal, utilizar o módulo de Comportamento Cineplex Basic para criar zonas no espaço bidimensional em posições relevantes do labirinto que tem significado na tarefa. As zonas podem ser combinadas em seqüências, e Cineplex eventos lógicos (tais como entradas em zonas e cumprimento das seqüências) são atribuídos de forma que se o rato satisfaz os critérios para o evento, que o evento torna-se verdade. Atribuir eventos com saídas digitais e de interface através de um cartão de entrada superporto ao sistema comportamental.
- Um sistema de controlo de comportamento totalmente automatizado
- Arena de teste comportamental: Use uma arena em forma de teste apropriado para a tarefa comportamental na projeção Piso Maze. Construa o sãona utilização fosco acrílico branco e colocá-lo diretamente na projeção Piso Maze.
Nota: As dimensões podem ser personalizadas para a tarefa comportamental utilizada. As paredes são tipicamente 45-50 cm de altura. Aqui usamos arenas de teste de dupla face (bowtie labirinto 12) para maximizar o número de ensaios realizados em uma sessão (Figura 1B para dimensões do labirinto gravata borboleta). A arena de teste tem quatro áreas designadas definidas no software de rastreamento: Área Leste da Imagem, West Área de Imagem, um Pronto área experimental Médio, e uma área pronta Teste Oeste (Figura 1C). - Sistema comportamental: Um sistema de interface de comportamento controlado por software MED-PC IV executa programas escritos em casa em MEDstate Notation (ver apêndice). Utilize os eventos de Cineplex sistema comportamental para acompanhar o progresso de um rato durante a tarefa, controlar a apresentação de imagens, oferecer pistas de áudio e entregar recompensa.
- Da interface do cartão de saída superporto à entrada digital Omniplex para adquirir ª vezAmped ocorrências de eventos comportamentais no ambiente de software para PlexControl desligada analisa. Emitir sinais auditivos usando um gerador de áudio programável.
Nota: Os eventos comportamentais do aparelho apresentado aqui pode operar equipamentos de terceiros (por exemplo, laser para estimulação optogenetic) através de uma placa de transferência de dados, se necessário. - Casa do Superporto do cartão de saída, cartão de entrada superporto e gerador de áudio programável em um gabinete de interface de mesa. Interface com os cartões com uma placa PCI DIG-704PCI-2 instalado em um computador pessoal (PC) utilizando um cartão de Decoder DIG-700F instalado no gabinete de mesa.
- Entregar bipolares ICS onda quadrada para o rato usando um estimulador auto estimulação intracraniana programável. Conecte o aparelho estimulador para o PC através de um cartão PHM152 COM. Recomendadas parâmetros ICS: Pulse 1 e 2 Duração: 500 ms; Delay entre Pulse 1 e 2: 500 ms; freqüência: 100 Hz.
Nota: entrega ICSé automatizado durante a tarefa, mas podem ser entregues manualmente usando uma caixa de botão programável interface com um módulo SmartCtrl.
- Da interface do cartão de saída superporto à entrada digital Omniplex para adquirir ª vezAmped ocorrências de eventos comportamentais no ambiente de software para PlexControl desligada analisa. Emitir sinais auditivos usando um gerador de áudio programável.
- Arena de teste comportamental: Use uma arena em forma de teste apropriado para a tarefa comportamental na projeção Piso Maze. Construa o sãona utilização fosco acrílico branco e colocá-lo diretamente na projeção Piso Maze.
- Sistema de aquisição de dados Neural
- Verifique se o sistema de piso Projeção quadro Labirinto e ICS é aterrado para o pré-amplificador do Neural Data Acquisition System Omniplex para minimizar o ruído elétrico nas gravações neurais.
- Simultaneamente coletar dados neurais, as coordenadas de posição de Cineplex e bandeiras de eventos comportamentais do sistema comportamental no arquivo de dados para análise off-line.
2. Preparação animal
- Animais
- Obter ingênuos 22 dias de idade Masculino ratos Long-Evans.
- Par abrigar os ratos e permitir que eles se aclimatar ao viveiro durante uma semana.
- Lidar com ratos diariamente para ~ 5 min.
- Uma vez que os ratos atingir 250-275 g, começar horários de alimentos manter seu peso corporal a 85-90% do seu peso alimentação livre. Nós Alvoights são aumentados em 10 g / mês até ratos atingem 350 g.
- Única casa os ratos e continuar a programação de comida por pelo menos uma semana antes de começar a cirurgia para implante de estimulação e gravação de eletrodos.
- O implante cirúrgico
Realizar procedimentos cirúrgicos em condições assépticas padrão e de acordo com as diretrizes institucionais e regulatórias.- Anestesiar ratos com isoflurano.
- Fazer uma incisão no couro cabeludo para revelar o crânio para limpeza e identificação de bregma e lambda.
- Faça craniotomias nas coordenadas relevantes.
- Fixe os parafusos de fixação do crânio.
- Abaixe a ponta de um eletrodo de ICS no MFB com as seguintes coordenadas: ântero-posterior, -2,7 mm do bregma; lateral, ± 1,8 mm; dorsoventral, -8,5 mm a partir da superfície do crânio. Um segundo eletrodo ICS pode ser implantado no hemisfério oposto, como um backup no caso do eletrodo de mau funcionamento.
- Fixe os eletrodos ICS para tele crânio e âncora parafusos com cimento ósseo. Não cimentar o pedestal (caixa de plástico sobre o eletrodo estimulante) dos eletrodos.
- Abaixe os eletrodos de registro no local de interesse e fixar o dispositivo com cimento ósseo.
- Posicione o pedestal ICS longe do dispositivo de gravação e garantir os eletrodos ICS e dispositivos de gravação para os parafusos de fixação com cimento ósseo.
- Permitir a recuperação pelo menos sete dias antes de iniciar a habituação ao protocolo de formação.
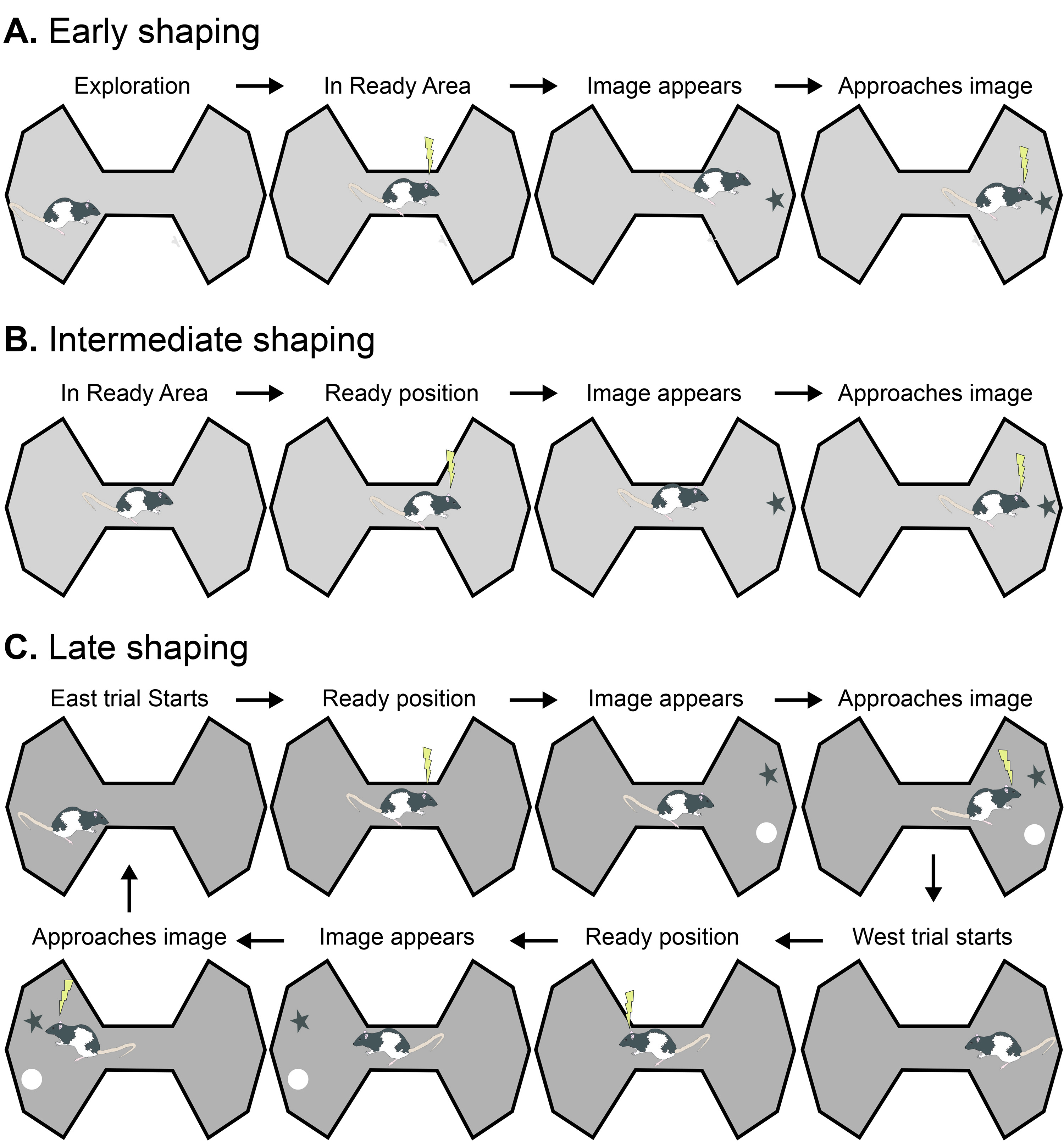
3. Shaping Comportamental: Geral Shaping consiste em três etapas: No início, intermediário e atrasado Shaping (Figura 2).
Nota: O objetivo da formação iniciais e intermediários é treinar o rato para manter uma "posição pronto 'parado na Área de Pronto para cada ensaio, e realizar vários testes em uma sessão. Semi-automatizar formação comportamental assim que o treinamento pode ser adaptado para as taxas individuais de aprendizagem de um rato. Oncea ratazana é a manutenção de uma "posição pronto" bem sucedido, vá para a tarefa formação específica (shaping Tarde) com o objectivo de transferir o rato sobre um protocolo totalmente automatizado para controle comportamental precisa e imparcial (Figura 2).
- Formação precoce (Figura 2A)
- Dia 1: habituar o rato para a sala comportamental por 10 minutos com o equipamento ligado, em seguida, retornar para a colônia.
- Dia 2: Repetir o passo 1, em seguida, habituar o animal para a arena de teste durante 10 min.
- Dia 3: Conecte o ICS e amarras headstage ao rato, e habituar o rato para a arena de testes para 10 min.
- Dia 4: Determine o menor ICS amplitude para estabelecer uma preferência local usando um protocolo de preferência condicionado lugar informal. Titular Pulse 1 e 2 amplitudes. Valores de amplitude típicos são 20-80 mA.
- A partir do dia 5: Entregar ICS recompensa para treinar os ratos para associar a Área de Pronto e leste e oeste imagem apresentações com ICS recompensa. Continue até que o rato está alternando entre áreas de imagem Leste e Oeste.
- Formação intermédia (Figura 2B).
- Introduzir o ruído branco (50 dB) para sinalizar o início de um julgamento. Desligue o ruído branco quando o rato entra na área de Pronto.
- Automatizar entrega ICS para a entrada no espaço Ready, e para a conclusão bem sucedida "posições prontos '. Ajuste a probabilidade de entrega ICS na entrada e bem sucedida "posição pronto 'para reforçar o comportamento.
Nota: Ajuste as probabilidades de recompensa manualmente, de acordo o desempenho do rato individual durante moldar. Diminuir probabilidades de recompensa para a entrada no espaço pronto e manter posições prontas de sucesso. Probabilidade final recomendada de recompensa para o cumprimento de "posições prontas de sucesso é de 5-10%. Os ratos são recompensados por todas as escolhas corretas. - Comece com curtas durações "posição pronto '(por exemplo, 200 ms). Gradualmente aumentar a dura 'posição pronto'ções em 100 etapas mseg.
- Ligue o ruído branco se o rato prematuramente quebra a "posição de pronto" para que o rato tem que reiniciar o julgamento.
- Mover-se para dar forma tardia, quando rato está segurando na "posição de pronto" para até 1.200 ms.
- Formação tardia (Figura 2C).
Nota: treinamento em modelagem tardio é específico para a tarefa em que o rato irá executar. Automatizar formação nesta etapa shaping para controle preciso e imparcial de todos os parâmetros da tarefa, mas manter a flexibilidade de entregar manualmente recompensas ICS. Protocolos de treinamento para duas tarefas são descritas.- Discriminação bicondicional Visual (vBCD) tarefa: Use estímulos visuais distintas para treinar os ratos em uma forma simples e luminância discriminence.
- Comece o julgamento ligando o ruído branco.
- Aleatoriamente impor latências 'prontos posição de 700 - 1.200 ms.
- Entregar ICS manualmente, se necessário reforçar sucesso 'po prontosições '.
- Apresentar um par de imagens na área de apresentação de imagem. Apresentar pseudorandomly a imagem correta do lado esquerdo ou direito da Área de Imagem.
- Entregar ICS para uma resposta correta e limpar o chão. A resposta correta é registrado quando o rato entra na zona em que a imagem correta está localizada. No primeiro dia de treinamento somente, emitir uma explosão de 75 dB de ruído branco como um impedimento para uma resposta incorreta.
- Emitir um julgamento correção, após um julgamento incorreto. Ensaios de correção tem parâmetros idênticos (lado esquerdo ou direito e latência "posição de pronto") como o julgamento incorreto anterior.
- Uma vez que os ratos são capazes de realizar com sucesso a discriminação simples, apresentar os diferentes padrões de piso para treinar a regra discriminação bicondicional.
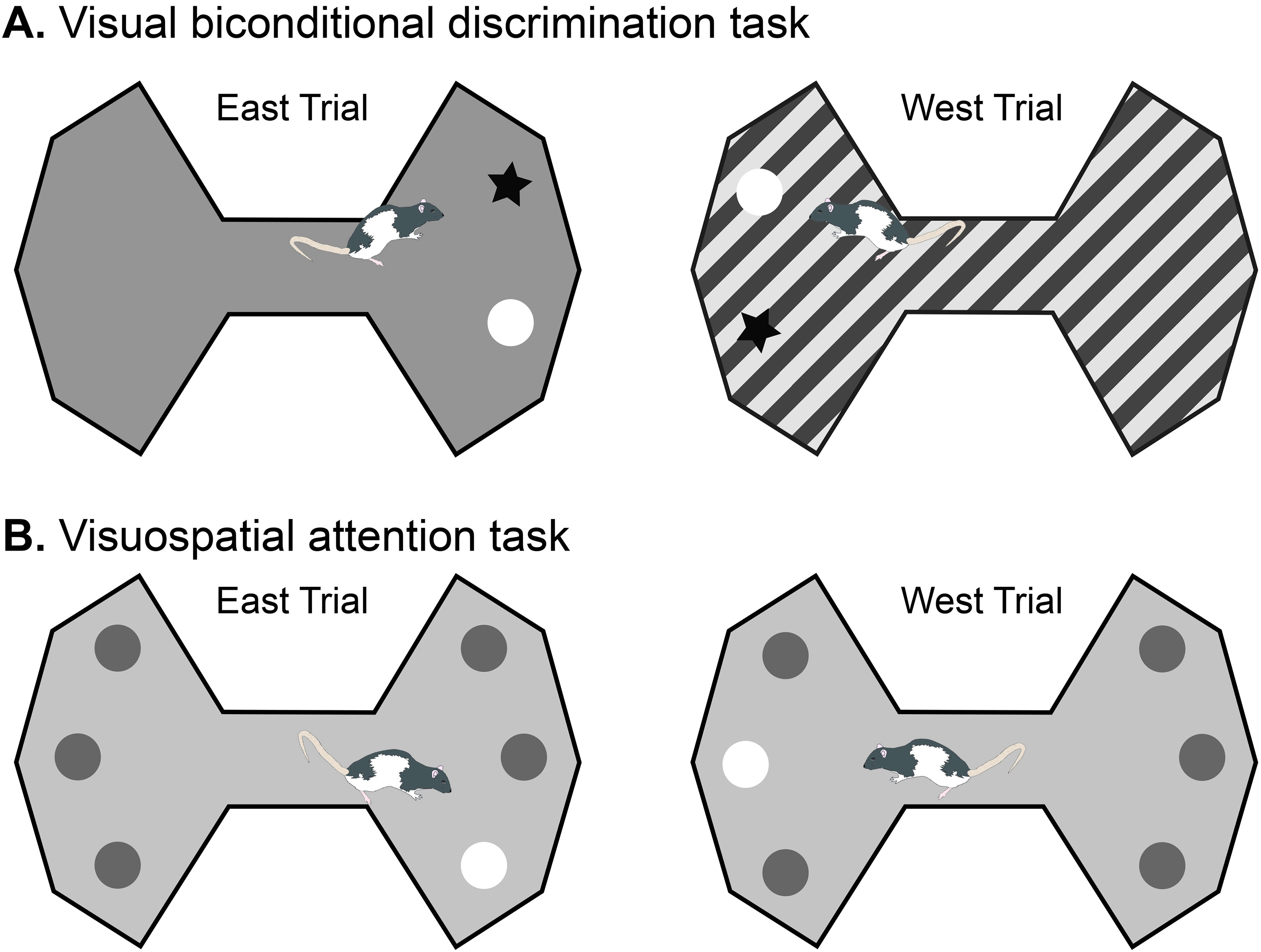
- Apresentar um novo par de imagens e dois padrões de piso distintos para servir como o contexto. A imagem correta está condicionada ao padrão de piso, por exemplo, o sta pretor está correto quando o chão é cinza eo círculo branco está correto quando o chão é listrada (Figura 3C).
- Pseudorandomly atribuir o padrão de piso e da posição (esquerda ou direita) da imagem correta para cada ensaio assegurando que os ensaios são contrabalançados.
- Implementar testes de correção, após um julgamento incorreto na qual os parâmetros de teste são idênticos aos do julgamento anterior.
- Atenção visuo-espacial (VSA) tarefa: Presente círculos brancos iluminados em locais espaciais definidas na arena para treinar os ratos para aproximar a localização espacial do círculo alvo.
Nota: Para esta tarefa a arena tem círculos cinza em diferentes localizações espaciais nas áreas de imagem Leste e Oeste. Depois de uma "posição pronto 'bem-sucedida, o círculo alvo acenderá (virar branco), eo rato deve aproximar-se de que local de destino (Figura 3B).- Aleatoriamente impor latências "posição" de pronto 1,000-1,600 ms em um julgamento por base experimental.
- Entregar ICS manualmente, se necessário reforçar sucesso "posições prontos '.
- Após a conclusão da "posição de pronto", iluminar aleatoriamente um dos círculos cinza.
- Entregar o ICS quando o rato entra na zona do círculo iluminado.
- Desligue a iluminação e começar o próximo julgamento, no lado oposto (leste ou oeste).
- No início da formação tarde, iluminar o círculo até que o rato se aproxima ou até o julgamento termina (5 seg depois iluminando o círculo). Marque cada ensaio ou como correto ou um julgamento omissão. Para os ensaios de omissão, iluminar todo o chão (piso branco apresentado) e nenhuma recompensa estará disponível até o próximo julgamento.
- Quando o desempenho do rato chega a 80% correto, diminuir a quantidade de tempo que o círculo permanece iluminado a 1 seg. O rato tem 5 segundos para fazer uma escolha.
- Não recompense para ensaios incorretas. Inicie o próximo julgamento.
- Se um tri omissãoal, iluminar o chão e começar um novo julgamento.
- Em 80% correto diminuir ainda mais o tempo do círculo alvo é iluminado para 500 ms.
- Escolha locais de destino aleatoriamente antes de cada julgamento. O rato vai continuar a ter 5 segundos para fazer uma escolha antes de todo o piso acende-se para assinalar o fim desse julgamento.
- Não recompense para ensaios incorretos ou omissão. O rato deve dar início a um novo processo no lado oposto da arena.
- Nota: círculos adicionais podem ser acrescentados em cada área de imagem para aumentar ainda mais a dificuldade da tarefa.
- Discriminação bicondicional Visual (vBCD) tarefa: Use estímulos visuais distintas para treinar os ratos em uma forma simples e luminância discriminence.
Resultados
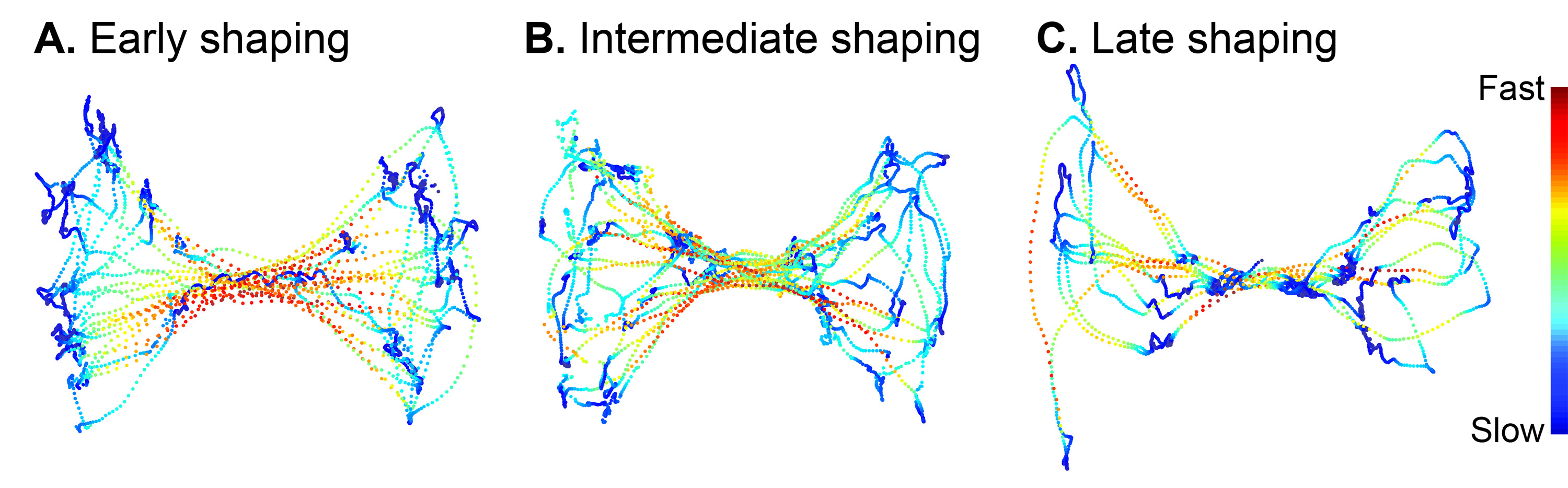
O objetivo das etapas gerais de modelagem é para aclimatar o rato para a arena de testes, treinar o rato para permanecer em uma "posição pronto 'estacionário para a apresentação dos estímulos visuais alvo, e se aproximar do local do estímulo visual correto. Depois de habituação à sala de ensaios, arena, e amarras, formação precoce requer tipicamente 100-150 ensaios até que os ratos estão alternando entre os lados leste e oeste da arena. Durante o início de moldar os ratos normalmente executado através da Área de Pronto-se no centro da arena e passar a maior parte do tempo explorando o perímetro da arena (Figura 4A). Os ratos na fase de formação Intermediate gradualmente aprender a manter uma "posição pronto 'parado na Área de Pronto exigindo 600-700 ensaios. Neste ponto, os caminhos dos animais são estereotipados laços da Área de Pronto para a área da imagem com menos tempo a explorar o perímetro do labirinto. No entanto, os ratos não são a manutenção de um 'po pronto estacionáriosição ", indicado pela velocidade à qual os ratos atravessar o centro da área Ready (Figura 4B).
Até o final da formação intermediária, os ratos manter uma "posição pronto 'parado na área de pronto antes de se aproximar do estímulo visual alvo. O rato em seguida, inicia o próximo ensaio, no lado oposto da arena (Figura 4C).
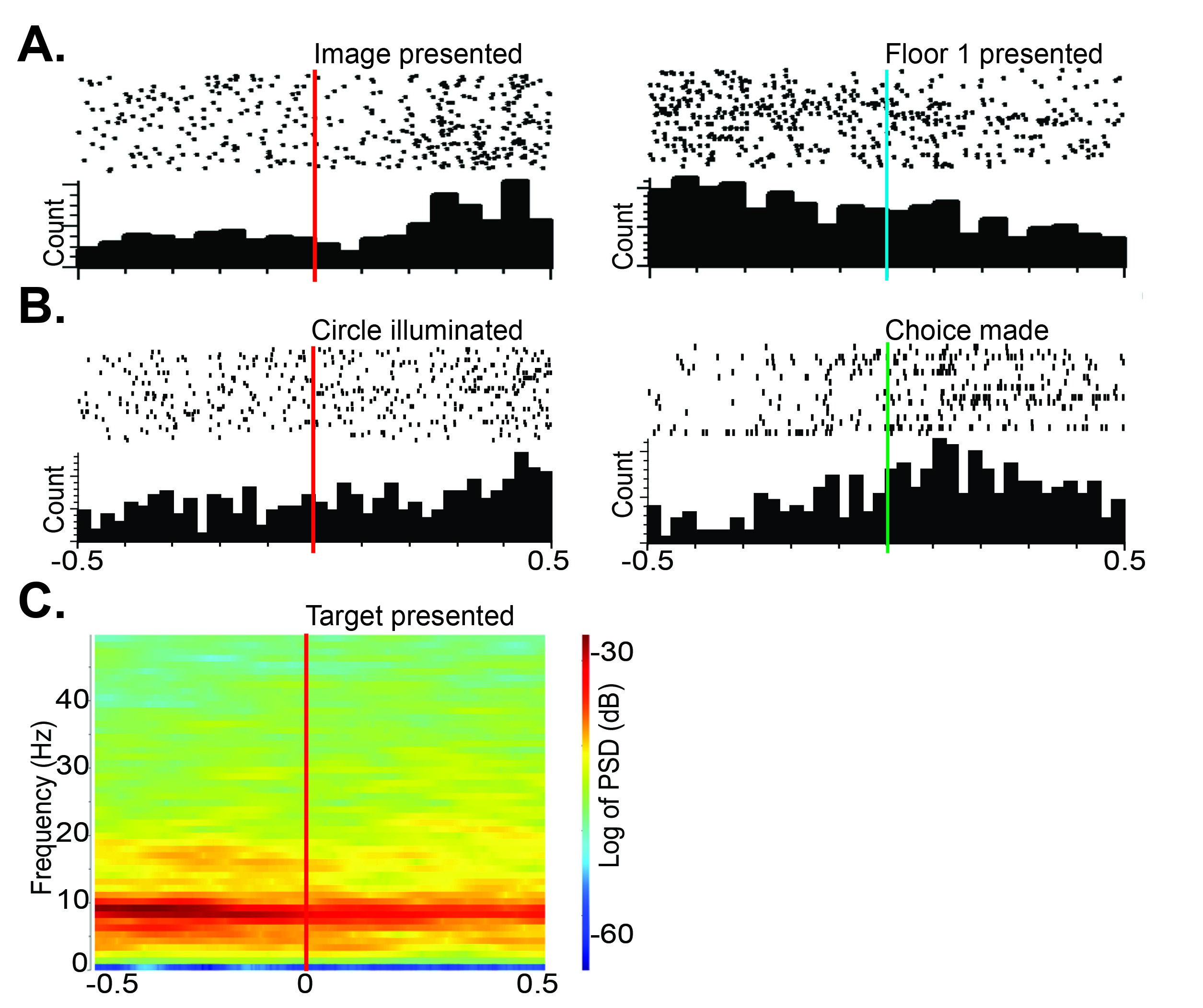
A integração do software de monitoramento eo sistema de aquisição de dados Neural com um sistema de controle comportamental permite análises de eventos relacionados de dados neurais. Matrizes de eletrodos dirigível pode ser estrategicamente colocadas para registrar-unidade única e de campo local atividade potencial. As gravações foram realizadas no córtex postrhinal quando ratos realizou a tarefa vBCD. Histogramas Perievent e parcelas de varredura revelam que as células no córtex postrhinal responder ao início do estímulo visual alvo e para o início do padrão de piso (Fig. 5A). No córtex parietal posterior de rats executando as tarefas VSA células respondem à apresentação da imagem, e em que a escolha foi feita com uma entrada na zona que define a imagem do alvo (Figura 5B). Campo atividade potencial local no córtex parietal posterior durante o desempenho na tarefa VSA mostra forte poder na faixa teta (~ 8 Hz) quando os ratos estão na "posição de pronto" antes da apresentação da imagem (Figura 5C).

Configuração Figura 1. Experimental. A. esquemática dos quartos comportamentais e de controlo. A projeção Piso Labirinto está alojado no quarto de comportamento. Os ratos são monitorados através de uma câmara superior. A sala de controle abriga o equipamento para controlar a tarefa e para coletar dados neurais. B. Dimensõesa gravata labirinto. C. Captura de tela do Cineplex Studio. As zonas são definidas pelo utilizador. Eventos lógicas são enviados como saídas digitais Cineplex ao sistema de controle comportamental (Med Associates) para monitorar o progresso do rato. Clique aqui para ver imagem ampliada.
{kind=link}

Figura 2. Esquemática das etapas de modelagem. A. No início de moldar o rato recebe ICS para entrar na área do Ready, e de entrar em áreas de imagem Leste e Oeste. O objetivo é treinar o rato para associar estas áreas com o ICS recompensa. Shaping B. Intermediário concentra-se em treinar os ratos para manter uma "posição pronto 'parado na Área de Pronto. As imagens são apresentadas only depois de manter uma "posição pronto 'bem-sucedida. Os ratos continuam a receber ICS para se aproximar da imagem na área de imagem. C. A formação tarde, o rato é manter com sucesso uma "posição pronto 'parado. O treinamento é tarefa específica, eo rato é treinado para aprender as regras específicas para executar uma determinada tarefa. Relâmpago indica entrega ICS. Clique aqui para ver imagem ampliada.
{kind=link}

Figura 3. A. Esquemática da tarefa vBCD Quando o chão é cinza, a estrela negra é recompensado;.. Quando o piso é listrado, o círculo branco é recompensado B. Esquemática da tarefa VSA. Círculos cinza indicam os locais de destino, nas áreas de imagem.O estímulo alvo é uma breve (500 ms) iluminação (branco) de um dos círculos. Os ratos são recompensados por se aproximar do local de destino correto. Clique aqui para ver imagem ampliada.
{kind=link}

Figura 4. Exemplos de caminhos durante a modelagem de dados. Posição a partir de dois segmentos de um rato apresentando em diferentes etapas de modelagem minuto. Velocidade do animal está representado pelo mapa de calor. As cores frias representam mais lentas as velocidades e as cores quentes representam velocidades mais rápidas. A. Durante o início de formação de ratos explorar e traseiro nas paredes externas das áreas de imagem Leste e Oeste e não pare na área Pronto. B. Um caminho estereotipado começa a surgir em sh Intermediateimitação. Caminhos de formar um laço para as áreas de imagem para a área de Pronto. Os ratos começam a manter com sucesso uma "posição pronto" na Área de Pronto. C. Quando ratos progredir para formação tarde, ratos manter "posições prontos 'estacionários e os caminhos dos ratos são mais estereotipados. Clique aqui para ver imagem ampliada.
{kind=link}

Figura 5. Exemplos de análises perievent relacionados. Uma. Células gravadas a partir do córtex postrhinal durante a tarefa vBCD com respostas diferentes para a apresentação da imagem de destino (à esquerda), ea apresentação do chão (direita). B. Células gravadas a partir do córtex parietal posterior durantea tarefa VSA com diferentes respostas à iluminação do círculo (esquerda). Aumento de disparo depois de escolher a localização espacial em que o círculo alvo iluminado (direita). C. Espectrograma mostrando forte poder teta no córtex parietal posterior durante a "posição de pronto". A linha vermelha vertical indica o fim de bem sucedida a posição pronto "e a apresentação das imagens. A linha azul vertical indica a apresentação do Piso 1 no julgamento começar na tarefa vBCD. A linha vertical verde indica que a escolha foi registrado na tarefa VSA. Clique aqui para ver imagem ampliada.
{kind=link}
Discussão
Descrevemos formalmente protocolos para treinar ratos em tarefas cognitivas totalmente automatizados complexos visuais na projeção Piso Maze. A projeção Piso labirinto foi usada com sucesso para estabelecer correlatos neurais da conjunções objeto de localização e sinais de erro no córtex postrhinal durante o desempenho em uma tarefa de discriminação visual 2-escolha 1.
O protocolo de moldagem comportamental é concebido para ser flexível de modo que possa ser adaptada a taxa de aprendizagem de um rato individual. O código personalizado escrito para o sistema comportamental permite ao experimentador para controlar a probabilidade de entrega ICS automatizado em etapas críticas durante o treinamento, por exemplo treinar a 'posição pronta. O código deve também permitir a entrega de manual do ICS usando uma caixa de botão programável durante. O objetivo da formação é cedo para estabelecer estimulação ICS eficaz para entrega recompensa para reforçar o comportamento. Quando possível, recomendamos a implantação stimulating eletrodos bilateralmente em MFB em caso de estimulação ineficaz em um hemisfério. A nossa experiência, no entanto, tem sido a de que quase todos os eléctrodos implantados ICS ter sido funcional para proporcionar um estímulo gratificante. O estágio de formação intermédia é fundamental para a formação do rato para manter uma "posição pronto" na Área de Pronto. Na "posição de pronto ', o rato deve ser parado com o nariz apontando para as áreas da imagem onde as imagens escolha serão apresentados. A "posição de pronto" controla quando as imagens aparecem, a direção de onde o rato se aproxima das imagens e da distância a que o rato vê as imagens. Recomendamos LEDs de monitoramento montados em headstage do rato para monitorar a direção em que a cabeça do rato está a apontar para um melhor controle do comportamento e controle mais preciso da apresentação imagem de destino. Entrega manual do ICS pode ser emitido para treinar os ratos para manter a "posição & # pronto apropriado8217. Quando o rato é a manutenção satisfatórios "posições prontos 'em cada ensaio, a formação em formação tardia é tarefa específica. Na modelagem Tarde ratos são treinados para aprender as regras específicas para executar uma determinada tarefa.
Usamos ICS como o nosso método de entrega recompensa que este método fornece um feedback instantâneo para o rato, resultando em aprendizagem mais rápida durante a formação comportamental, e os ensaios mais concluída em uma sessão quando a coleta de dados neurais na tarefa automatizada. Entrega ICS, no entanto, resulta em artefatos elétricos nas gravações neurais, e pode ser problemático para analisar LFP contínua ou dados multiunit. O intervalo em torno do artefato elétrico pode ser removido offline a partir do arquivo de dados de gravação neural antes da análise contínua de dados. Artefatos Estereótipo do ICS em dados de alta passagem filtrada pico pode ser facilmente removido desligada sem afetar único pico análises. Futuro otimização de protocolos para a projeção Piso labirinto inclui o uso de optogenferramentas etic para oferecer recompensa interna para minimizar e eliminar os artefatos associados com a estimulação elétrica.
A projeção Piso Labirinto é otimizado para as capacidades visuais de ratos e é, portanto, mais adequado para tarefas comportamentais visualmente guiadas. Note-se que as comparações diretas não podem ser feitas entre os paradigmas experimentais no labirinto Piso Projeção e câmaras operantes por causa de diferentes protocolos experimentais utilizados e diferentes definições de critério para a aquisição bem sucedida de uma dada tarefa. Já mostramos anteriormente, no entanto, que os ratos adquiriram uma tarefa de discriminação visual 2-escolha simples em ~ 50 ensaios na projeção Piso Maze 2 em comparação com> 300 ensaios em outros estudos, onde as imagens foram apresentados verticalmente em câmaras operantes 3,10. A tarefa VSA foi modelado após a tarefa reação de série 5-escolha clássica 13 (5-CSRT) concebido para avaliar atencional visuaisprocessos. Tipicamente, o 5-CSRT é realizada numa câmara operante e requer o animal a fazer um puxão nariz no buraco nariz-puxão apropriado indicado por um flash de luz; aqui a tarefa VSA é levada a cabo num espaço aberto, onde os animais têm que permanecer parado em um local específico na arena, direcionar sua atenção para os locais de destino e esperar que o estímulo luminoso a aparecer. Em nossa experiência, os ratos necessário ~ 3.200 ensaios para atingir o critério (75% em dois dias consecutivos) no 5-CSRT 14, em comparação com aproximadamente 800 ensaios na tarefa VSA na projeção Piso Maze.
Outro benefício de tarefas comportamentais realizados na projeção Pavimento labirinto é que as tarefas são realizadas em uma grande área aberta, que explora a tendência natural do rato para explorar o seu ambiente, ao contrário de tarefas que requeiram o animal para fixar o olhar para uma alvo fixo. Uma grande vantagem de utilizar ratos movimentando-se livremente em uma arena aberta e# 160; no labirinto aparelho Piso projeção é que a informação espacial tanto alocêntrica e egocêntrico pode ser coletada com informação visual. Outra vantagem do nosso paradigma é que as tarefas não precisa limitar-se a apresentação de imagens estáticas. Posição e características de estímulos visuais que são dinâmicas pode ser usado em tarefas futuras. Usando recursos de rastreamento do sistema de investigação comportamental Cineplex, as tarefas podem ser desenvolvidos para um entendimento funcional mais detalhada de uma determinada estrutura cerebral. Combinando registros eletrofisiológicos simultâneos com tarefas cognitivas visualmente guiadas, questões fundamentais de como a atividade do cérebro está relacionada a processos cognitivos, como a tomada de decisão e de discriminação visual podem ser exploradas.
Usando tarefas visualmente guiadas, os resultados de estudos realizados em ratos pode ser melhor traduzido para os seres humanos, com o objetivo final de fornecer terapias para doenças cognitivas humanas.
Divulgações
Taxa de inscrição para este vídeo-artigo é patrocinado pela Plexon Inc.
Agradecimentos
Este trabalho foi financiado pela NSF IOS 1146334, NSF EFRI 0937848, DARPA N66001-10-C-2010, e NSF IOS 0.522.220 para RDB. Agradecemos Stacie Hyatt em Plexon Inc para a assistência na preparação deste manuscrito.
Materiais
| Name | Company | Catalog Number | Comments |
| OmniPlex D Neural Data Acquisition System | Plexon Inc | ||
| DigiAmp Digitizing Amplifier | Plexon Inc | ||
| Frame for Floor Projection Maze | 80/20 Inc | 15 Series T-slot framing | |
| Short throw projector | NEC Display Solutions | WT610E | |
| Da-Lite lace and grommet screen | Da-Lite Screen Company | 81326C | |
| Plexiglas | Modern Plastics | ||
| SuperPort Input card | Med Associates Inc | DIG-713A | |
| SuperPort Output card | Med Associates Inc | DIG-726 | |
| SmartCtrl Interface module | Med Associates Inc | DIG-716B | |
| Decoder card | Med Associates Inc | DIG-700F | |
| PCI card | Med Associates Inc | DIG-704PCI-2 | |
| Programmable audio generator | Med Associates Inc | ANL-926 | |
| Programmable Intracranial Self Stimulation Stimulator | Med Associates Inc | PHM-150B | Operated by a PHM-152COM card |
| 2 Channel electrode | Plastics1 | MS303/13/SP | Cut 15-20 mm below the pedestal |
| MED-PC IV Software | Med Associates Inc | SOF-735 | |
| OmniPlex Software | Plexon Inc | ||
| CinePlex Software: Tracking and Basic Behavior Modules | Plexon Inc |
Referências
- Furtak, S. C., Ahmed, O. J., Burwell, R. D. Single neuron activity and theta modulation in postrhinal cortex during visual object discrimination. Neuron. 76, 976-988 (2012).
- Furtak, S. C., et al. The Floor Projection Maze: A novel behavioral apparatus for presenting visual stimuli to rats. J. Neurosci. Methods. 181, 82-88 (2009).
- Bussey, T. J., et al. The touchscreen cognitive testing method for rodents: how to get the best out of your rat. Learn. Mem. 15, 516-523 (2008).
- Bussey, T. J., Muir, J. L., Everitt, B. J., Robbins, T. W. Triple dissociation of anterior cingulate, posterior cingulate, and medial frontal cortices on visual discrimination tasks using a touchscreen testing procedure for the rat. Behav. Neurosci. 111, 920-936 (1997).
- Forwood, S. E., Bartko, S. J., Saksida, L. M., Bussey, T. J. Rats spontaneously discriminate purely visual, two-dimensional stimuli in tests of recognition memory and perceptual oddity. Behav. Neurosci. 121, 1032-1042 (2007).
- Gaffan, E. A., Eacott, M. J. A computer-controlled maze environment for testing visual memory in the rat. J. Neurosci. Methods. 60, 23-37 (1995).
- Keller, J., Strasburger, H., Cerutti, D. T., Sabel, B. A. Assessing spatial vision - automated measurement of the contrast-sensitivity function in the hooded rat. J. Neurosci. Methods. 97, 103-110 (2000).
- Lashley, K. S. The mechanism of vision V The structure and image-forming power of the rat's eye. J. Comp. Psychol. 13, 173-200 (1932).
- Lashley, K. S. The Mechanism of Vision: Xv. Preliminary Studies of the Rat's Capacity for Detail Vision. J. Gen. Psychol. 18, 123-193 (1938).
- Minini, L., Jeffery, K. J. Do rats use shape to solve "shape discriminations". Learn. Mem. 13, 287-297 (2006).
- Milner, P. M. Brain-Stimulation Reward - a Review. Can. J. Psychol. 45, 1-36 (1991).
- Albasser, M. M., et al. New behavioral protocols to extend our knowledge of rodent object recognition memory. Learn. Mem. 17, 407-419 (2010).
- Bari, A., Dalley, J. W., Robbins, T. W. The application of the 5-choice serial reaction time task for the assessment of visual attentional processes and impulse control in rats. Nat. Protoc. 3, 759-767 (2008).
- Agster, K. L., Burwell, R. D. Structure and function of the rodent postrhinal cortex: comparisons to other cortical regions. , (2007).
Reimpressões e Permissões
Solicitar permissão para reutilizar o texto ou figuras deste artigo JoVE
Solicitar PermissãoThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados