
Method Article
ロボット液体ハンドリングシステムを用いたiPS細胞培養および生産ベースのスケーラブルな96ウェルプレート
要約
The protocols described allow laboratories to perform scalable, adherent stem cell culture in high throughput with minimal labor, experience and equipment investment cost using a programmable liquid handling robot and 96-well plates. iPSCs passaged more than 20 times on this system maintained pluripotency, normal karyotypes and differentiated into cardiomyocytes.
要約
多能性幹細胞培養における継続的な進歩は、再生医療、創薬及び安全性試験では、これらの細胞を使用するためのベンチ、ベッドサイドの間のギャップを閉じています。組織工学および移植のための細胞由来の生物薬剤学及び幹細胞を産生するために、費用対効果の高いセル製造技術が不可欠です。多能性と時間をかけてダウンストリーム·アプリケーション( 例えば 、細胞分化)の細胞の安定した性能を維持することは、大規模なセル生産に最も重要です。まだそれは、オペレータがかなりの変動を導入だけでなく、スケールアップをするために非常に高価であることができる場所細胞が手動で培養される場合は特に達成することは困難です。最小限の技術者の関与や経験を必要とする液体ハンドリングロボットを開発したマルチチャンネルベンチトップを使用して、オペレータの影響新規幹細胞培養プロトコルを高スループット、大規模な幹細胞の生産を可能にし、削除します。とともにこれらのプロトコルは、ヒト人工多能性幹細胞(iPS細胞)を凍結ストックから直接無フィーダー条件で培養し、96ウェルプレート中で維持しました。通路に分割するための最適なコロニー密度を示す一連の画像に基づいて、ときに細胞株、所望のスケールアップ率に応じて、操作者が容易に決定することができます。その後、必要な試薬は、遠心分離工程なしに新しいプレートにコロニー分割を行うために用意されています。 20継代(2~3ヶ月)後、2つのiPS細胞株は、安定した核型を維持した幹細胞マーカーを発現し、かつ高効率で心筋細胞に分化しました。システムは、96ウェルプレート用に設計された新たな分化プロトコルまたは遺伝子操作のその後のハイスループットスクリーニングを行うことができます。この技術は、アプリケーションのための無数の同一性幹細胞を大量に生成するために労力および技術的負担を減少させます。
概要
6 -ヒト人工多能性幹細胞(性IPSC)の使用は、化合物試験、再生医療や病気のモデリング2 2007年1での導出以来、大幅に増加しています。この需要は圧倒的な量で体細胞に分化させることができる多能性細胞を大量に生成するiPS細胞の能力から来ています。指向分化技術が7向上したよう-ので、高品質のiPS細胞の大量生産のための要件を行い、14 - 10をし、ヒト細胞または組織のモデリングと細胞治療の開発11を増加させます。 18 -それは広く、体細胞15を由来する他の病気の中で、心筋梗塞またはB細胞機能の交換はiPS細胞数億から数十億のが必要になることが挙げられます。薬物発見およびtの場合さらに、ますます複雑な3D組織モデリングherapyは細胞9,13,19を大量に要求します。これらの例の全てにおいて、定義され、均一で再現性の性IPSCは、製造するのに利用可能であり、簡単でなければなりません。
組織工学および移植のための細胞由来の生物薬剤学及び幹細胞を産生するために、費用対効果の高いセル製造技術が不可欠です。これらの技術が正常に大規模な、非iPS細胞、真核生物ベースの生産のために展開されている理由の一つ28 -マイクロキャリア基材26を用いて、25または懸濁液- iPS細胞のスケーリングされた生産は、懸濁培養20に焦点を当てています。いくつかのグループは、多能性幹細胞20,21,23,24,29を得る懸濁培養システムを実証しています。しかし、これらのアプローチは、組織工学を駆動しlaboratを行う、新規の分化プログラムを開発する研究者には容易に入手できない高価で複雑なシステムを利用しますORY規模な研究。また、サスペンションとマイクロキャリアiPS細胞の培養物は、凝集を調節するために、適応と技術や、Rhoキナーゼ阻害剤の連続使用など、従来の付着性iPS細胞培養では見られない化学物質、消泡剤および濾過を必要とします。細胞への物理的ストレス、機械的に攪拌することにより、ならびにマイクロキャリア衝突時に導入された、懸濁培養においてより一般的です。これらの問題は、新たに生成された幹細胞株は懸濁状態で培養することができるれる予測と速度を制限します。その他は、プレート培養技術30,31を模倣するロボットプレートハンドリングシステムを開発してきたが、これらのプラットフォームは、機器や幹細胞培養に関連する基本的な課題に加えて動作するための専門知識のために多額の投資を必要としています。
次の作業は自己完結型の、標準的な8チャンネルロボット液体を利用するスケーラブルなiPS細胞培養システムの開発と実践について説明しますハンドラ96ウェルプレート。この方法は、実験室規模iPS細胞培養および大量iPS細胞の生産を橋渡しするように設計された( 例えば 、10 7 -技術者あたり週1.5×10 9細胞)の新しいiPS細胞技術の開発、それらを有効にするには、簡単に大規模なハードウェアや労力の投資なしで生産を拡大します。この方法では、セットアップが比較的安価で、専用の細胞培養フードを必要とせずに小型機器の設置面積を有し、無幹細胞培養、プログラミングやエンジニアリングの経験に少しを必要とし、自動化された高スループットにメディアを有効にするには、標準的な細胞培養装置を利用しますセル生産。目的は、細胞培養物を食い止めるために、新しい研究所、マニュアル栽培に自分のアイデアや幹細胞を大量に生産する経済的な手段を望むものを開発する障壁を見つけた人が利用できる、スケーラブルな幹細胞培養が可能なシステムを開発することでした。ここで提示プラットフォームは、上の技術者の影響を除去します細胞培養幹、一貫した幹細胞の産生を可能にするために送り通路手順を正規化します。
プロトコル
96ウェルプレートフォーマットで、従来の接着培養条件を維持しながら、次のプロトコルのためのギルソンpipetmaXたロボット液体ハンドリングシステムは、自動化された、スケーラブルな幹細胞培養および生産を容易にします。従来の6ウェルプレート培養と同様に、iPS細胞は、別個のコロニーの単層としてではなく、96ウェルプレートフォーマットでこのプロトコルを用いて成長させます。各ウェルは、同質遺伝子または別個にすることができ、ロボットが各ウェル分離さを保つことができるので、いずれかの構成を並行して培養することができます。培養物を、カスタマイズスケジュール、ユーザがそれにより播種密度およびスケール速度を制御する分離方法と分割比を選択する通路プログラムに供給される給電プログラム:標準的なロボットのiPS細胞培養ルーチンは、2つの段階を有します。次のプロトコルは、新しい文化が供給及び通路が達成されるか、開始し、iPS細胞の培養を促進する補助的なプログラムされている方法について説明します。
注:次のプロトコルのために検証され、特定のマトリックスコーティング材上のアイコンをクリックすると解離試薬のための材料表をご参照ください。
1.準備細胞外マトリックスゲルコーティングした96ウェルプレート
- 6つの新しい、RT 96ウェルプレートからパッケージを削除し、2位、3、5、7、8、9(ベッド位置については、図1A参照 )にロボットのベッドを取り扱う液体の上に置きます。
- ベッド6位予め冷却、4℃4ウェルトラフを配置します。
- 予め冷却し、4℃の200μlのピペットチップとのベッドの1位のチップラックの負荷カラム12。
- 無菌技術を使用して一定量を注入することにより25ミリリットル4°C DMEM / F12とベッドの位置6における第1ウェル(左ほとんどの)谷を埋めます。代わりに、転送を完了するためにピペットを使用しています。
- (PLHR、 図1Aを参照)を、96ウェルプレートの蓋を外し、特別に設計された板状蓋体保持ラックにそれぞれスライドさせます。接触を避けますプレートの蓋の内側に。
注意:プレートの蓋の内側の処理または1つの蓋の内側には、別の外側が汚染のための優れたルートで触れるプレートの蓋を積み重ねます。 - ロボット制御、タッチパッドを使用して、十分にプリウェットプロセスを開始するためのボタンの次のシリーズを押します。
- 「プロトコルの実行」をタップします。
- 「細胞外マトリックスゲル予め湿らせ」を選択し、[次へ]をタップします。
- ユーザ決定:選択したプログラムを事前にテストするためのステップバイステップのウィザードを使用するには、「テストの実行」をタップします。
注:ロボットは実行されませんが、むしろソフトウェアは、ソフトウェアの問題のためのプロトコルをテストします。確立されたプロトコル、タッピング、「設定をスキップ」で許容可能です。 - 「実行プロトコル」をタップします。
- プリウエット処理(ステップ1.6)の間に1.8に進みます。
- 成長因子の氷1 4mgのアリコートに解凍を50ml中に含まれる細胞外マトリックスゲル(GFRM)の減少しますコニカルチューブを-80℃で保存しました。使用する準備ができるまで氷上にアリコートにしてください。
注:RTにさせ、有用でない場合GFRMが固化します。 - 25ミリリットルのガラスピペットで24ミリリットル4°C DMEM / F12中に4mgのGFRMアリコートを再懸濁します。 DMEM / F12を転送する場合、ピペットはGFRMアリコートを再懸濁する前に冷却することができるように、2〜3秒間一時停止します。
- 前湿潤処理(ステップ1.6)が完了すると、1.11に進みます。
- ベッドの位置6の谷の第四ウェルにDMEM / F12のGFRM混合物の24ミリリットルを転送します。
- ロボット制御タッチパッドを使用して、細胞外マトリックスゲルコーティングプロセスを開始するためのボタンの次の一連のキーを押します。
- 「プロトコルの実行」をタップします。
- 「細胞外マトリックスゲルアリコート」を選択し、[次へ]をタップします。
- ユーザ決定:選択したプログラムを事前にテストするためのステップバイステップのウィザードを使用するには、「テストの実行」をタップします。
注意:ロボットが実行されますが、早咲きのはありませんRソフトウェアは、ソフトウェアの問題のためのプロトコルをテストします。確立されたプロトコル、タッピング、「設定をスキップ」で許容可能です。 - 「実行プロトコル」をタップします。
- ステップ1.12が完了すると、プレートの蓋を交換してください。
- 37℃、5%CO 2、加湿インキュベーターに細胞外マトリックスゲルコーティングした96ウェルプレートに移し、プレートを使用するか、または格納されているために準備ができて、その時点で24時間そこに保持します。
注:酌量すべき状況下では、新たにコーティングされた細胞外マトリックスゲルプレートが推奨され、インキュベーションが、24時間のインキュベーションのO / Nの15〜30分後に使用することができます。 - 繰り返しプロトコルは1.1、1.3、1.5〜1.6、1.10、およびGFRMを含むDMEM / F12の全てまで、1.12から14が使用されているステップ。
2.保管細胞外マトリックスゲルコーティングした96ウェルプレート
- 37℃、5%CO 2、加湿インキュベーターから細胞外マトリックスゲルコーティングした96ウェルプレートを外し。
- オプション:細胞外マトリックスゲルLLOW 2.3に進む前に、RTに96ウェルプレートをコーティングしました。
注:このオプションのステップでは、プレートを4℃で配置された場合の凝縮が構築削減します。 - 2位、3、5、7、8、9(ベッド位置については、図1A参照 )に液体ハンドリングロボットベッドの上でプレートを置きます。
- RT 200μlのピペットチップとのベッドの1位のチップラックの負荷カラム12。
- ベッド位置6の4つのトラフリザーバを配置します。
- (右端)RT DMEM / F12とリザーバのウェル4を入力します。
- 96ウェルプレートの蓋を外し、PLHRにそれぞれスライドさせます。
- ロボット制御、タッチパッドを使用して、ボタンの次の組み合わせを押します。
- 「プロトコルの実行」をタップします。
- 「細胞外マトリックスゲルアリコート」を選択し、[次へ]をタップします。
- ユーザ決定:選択したプログラムを事前にテストするためのステップバイステップのウィザードを使用するには、「テストの実行」をタップします。
注:ロボをtは実行されませんが、むしろソフトウェアは、ソフトウェアの問題のためのプロトコルをテストします。確立されたプロトコル、タッピング、「設定をスキップ」で許容可能です。 - 「実行プロトコル」をタップします。
- 完了すると、プレートの蓋を交換し、機械ベッドからプレートを取り外します。
- 6インチパラフィンフィルムストリップにより1インチで、各細胞外マトリックスゲル(蓋がプレートを満たしている)コーティングした96ウェルプレートの側面全体を包み込みます。気密シールを作成するためにパラフィンフィルムを延伸してください。
- オプション:完成した細胞外マトリックスゲルコーティングの日にプレートにラベルを付け、細胞外マトリックスゲルロット番号、ユーザ名、およびその他の情報。
- 彼らは2週間まで使用することが良いだろう、4℃でプレートを保管してください。
注意:プレートが正常に2週間の限界を超えて使用されてきた、しかし、これはお勧めできません。
3.幹細胞コロニー播種密度の実行ライブまたは凍結培養から96ウェルプレート形式で勾配:幹細胞株に正常航路の間隔を起動するか、または復元する方法
- 凍結培養で始まる場合は、3.2に進みます。既にプレート上の生幹細胞培養で始まる場合は、ステップ3.5で始まります。
- 氷の小さな塊のみが残るまで37℃の水浴中でチューブを旋回することにより、凍結培養物を解凍します。
- オプション:10μMのY27632を含む新鮮なSCGMを上清培地を吸引し、7ミリリットル中の幹細胞ペレットを再懸濁し、300×gで2分間、細胞増殖培地(SCGM)、遠心幹RT 10ミリリットルに解凍した細胞を希釈します。
注:このステップは、凍結メディアのキャリーオーバーを排除します。 - 3.6に進みます。
- ライブで始まる場合は、既に幹細胞をプレーティング:継代の細胞を通常通りに酵素的または非酵素的解離を使用します。 1.5から3000000セルの合計を収穫してみてください。通常、6ウェルプレートの1ウェル。のため採取した細胞を遠心300×gで2分間、上清培地を吸引し、7ミリリットル中に10μMのY27632を含む新鮮なSCGMを幹細胞ペレットを再懸濁します。 3.6に進みます。
- いずれかの凍結やライブ培養物から、細胞を確認し、10μMのY27632で7ミリリットルRT SCGMに懸濁されています。
- RT 200μlのピペットチップとのベッドの位置1におけるチップラックの負荷カラム12。
- ベッドの2位に4トラフリザーバを配置します。
- 置きつの新しい細胞外マトリックスゲルコーティングした96ウェルプレートベッド位置5で37℃に予め加温し、PLHRに入れるふたを取り外します。
- ピペットで容器のウェル3に再懸濁した細胞の7ミリリットルを転送または滅菌が注ぎます。
- ロボット制御、タッチパッドを使用して、ボタンの次の組み合わせを押します。
- 「プロトコルの実行」をタップします。
- 「播種密度勾配」を選択し、[次へ]をタップします。
- ユーザーの決定:選択を事前にテストするためにステップバイステップのウィザードを使用するには、「テストの実行」をタップしますedプログラム。
注:ロボットは実行されませんが、むしろソフトウェアは、ソフトウェアの問題のためのプロトコルをテストします。確立されたプロトコル、タッピング、「設定をスキップ」で許容可能です。
- 「実行プロトコル」をタップします。
- 希釈系列が完了すると、次の給紙まで、37℃、5%CO 2、加湿インキュベーター中でプレートと場所を再度覆います。
- オプション:日付、株情報、ユーザー名、メディアタイプ、およびその他の関連情報とプレートにラベルを付けます。
- 以下のプロトコル4を使用して、必要に応じて、次の数日間に96ウェルプレートを養います。
注意:一般的な幹細胞のプレートを一度24時間完全培地交換が必要になりますし、SCGMを供給するためのY27632が含まれていません。通過後の最初の播種の間だけ。給餌の前に、汚染やコロニー密度のためにプレートをチェックしてください。コロニー密度の監視の多くのためのステップ3.16を参照してください。 - Cの近くに次の数日間に、いくつかの列プレート(通常は列5-8)の入力通過のための理想的な密度に近づきます。この密度を識別するために、心の中で次の情報を、図3(b)に示す濃度範囲に、96ウェルプレートを比較します。
- コロニーの大部分の間の空間は、隣接するコロニーの直径の約25%である通路。
注:継代までの時間を識別するための理論的根拠は、摂食及び成長の別のサイクルを避けるべきである接触を作るコロニーを生じることがあります。
- コロニーの大部分の間の空間は、隣接するコロニーの直径の約25%である通路。
- 均一に希釈されたプレートを開始し、定期的な文化を開始するには、理想的な密度および通路にある列を選択します。通路にプロトコル5を参照してください。
4.摂食96ウェルプレートの幹細胞コロニー
注:以下のプロトコルは、1枚の96ウェルの幹細胞コロニープレートの供給について説明します。技法は、並列に合計6プレートを収容するためにスケールアップすることができます。
- 96ウェルのを削除37℃からTEM細胞コロニープレート、5%CO 2、加湿インキュベーター。
- 汚染や細胞密度のためにプレートをチェックしてください。供給するためには、コロニー密度は、理想的な通過密度以下であることを確認してください。密度の詳細については、図3(b)を参照してください。
注:汚染は、濁ったメディアを提示することができるし、不快な臭いを伴うこと。小さな、明らかに非iPS細胞凝集体はまた、顕微鏡検査下で表示されることがあります。細胞密度を評価するために、上記の手順3.16.1を参照してください。 - 傾斜、37°Cランプのベッドの3位に96ウェル幹細胞コロニーのプレートを置きます。
- RT 200μlのピペットチップとのベッドの1位のチップラックの負荷カラム12。
- ベッドの2位に4ウェルトラフを配置します。
- 無菌注ぐかピペット転送のいずれかによってY27632なし2 8とmlの新鮮なベッド位置、RT SCGMにトラフのウェル3を入力します。
- PLHRに置く96ウェル幹細胞コロニープレートのふたを外します。
- 使用方法ロボット制御、タッチパッド、ボタンの次の組み合わせを押します。
- 「プロトコルの実行」をタップします。
- 「コロニーは一つのプレートをフィード」と次のタップを選択します。
- ユーザ決定:選択したプログラムを事前にテストするためのステップバイステップのウィザードを使用するには、「テストの実行」をタップします。
注、ロボットは実行されませんが、むしろソフトウェアは、ソフトウェアの問題のためのプロトコルをテストします。確立されたプロトコル、タッピング、「設定をスキップ」で許容可能です。 - 「実行プロトコル」をタップします。
- 給餌プロトコルが完了すると、再カバー96ウェル細胞コロニー板幹し、次の摂食または通路が必要になるまで、37℃、5%CO 2、加湿インキュベーターに戻します。これは通常、24時間後に必要とされます。
注:これは、日付、メディアタイプ、ユーザー名とその他の関連情報とプレートカバーに送りイベントを記録することをお勧めします。
5.継代96ウェルP1の幹細胞コロニーを食べました
- いくつかの送りサイクルの後、96ウェル幹細胞コロニーのプレートが通過できるようになります。このプロトコルは、1:12の分割割合を示す、1枚の96ウェルプレートに1列の経過を説明しています。ユーザーは、分割比を定義し、隣接していなくてもよいのウェルを選択することを含む、分割するウェルまたは任意の数の列を選択することができます。
- かどうかは、経過に決定するために、 図3Bを 96ウェルの幹細胞コロニープレート密度を比較します。コロニーの大部分の間の空間は、隣接するコロニーの直径の約25%であるか、または後続の給電が互いに成長するコロニーを生じるときに理想的な通過密度です。
- 全く汚染がないことを確認するために顕微鏡下で96ウェル幹細胞コロニープレートを調べます。
- 傾斜、37°Cランプのベッドの3位に96ウェル幹細胞コロニーのプレートを置きます。
- RT200μlのピペットでベッドの1位の先端装着ラックの負荷の列8-12ヒント。
- ベッドの2位に4ウェルトラフを配置します。
- 、ウェル2に8.5ミリリットルSCGM +10μMのY27632を入れ、空のトラフウェル1を残すだけでなく3で3.5ミリリットルの30%タンパク質分解およびコラーゲン分解解離試薬(またはEDTAベースの解離試薬)を入れ、よく4で4.5ミリリットルのPBSを入れました。
注:すべての試薬は室温または37℃であることができます。 PBSで希釈し、30%でのRTタンパク質分解およびコラーゲン分解解離試薬は、脂肪と線維芽細胞のために使用されたiPS細胞の培養は、ここで説明由来。 - ベッドの5位に1つの新しい、予め温めた37℃の細胞外マトリックスゲルコーティングした96ウェルプレートを置きます。
- 96ウェルの幹細胞コロニープレート蓋、ならびに新しい96ウェルプレートの蓋を外し、PLHRでそれらの両方を配置します。
- ロボット制御、タッチパッドを使用して、ボタンの次の組み合わせを押します。
- 「プロトコルの実行」をタップします。
- 「コロニースプリット1時12列1」を選択し、[次へ]をタップします。
- ユーザ決定:使用する「テストの実行」をタップしますステップバイステップのウィザードでは、選択したプログラムを事前にテストします。
注:ロボットは実行されませんが、むしろソフトウェアは、ソフトウェアの問題のためのプロトコルをテストします。確立されたプロトコル、タッピング、「設定をスキップ」で許容可能です。 - 「実行プロトコル」をタップします。
- 通路プロトコルが終了すると、両方のプレートを再度覆います。
- オプション:必要な情報( すなわち 、日付、細胞株、通路番号、メディアタイプ、ユーザ名など )を使用して新しいプレートにラベルを付けます。
- 次の給紙や通路が必要になるまで、37℃、5%CO 2、加湿インキュベーターに両方のプレートを返します。注:次の給紙が24時間後に典型的です。
注:細胞とコロニーが分割の2〜3時間以内にプレートに付着し、非常に広がっているはずです。これは、Rhoキナーゼ阻害剤の存在下に、細胞は、特徴的な幹細胞の形態を凝縮し、示すことになる( すなわち、玉石パックコロニーウィスコンシン大きな核の比が小細胞容積番目)最初のRhoキナーゼ阻害剤フリーの給餌後。
生産のための6収穫96ウェルプレート幹細胞
注:細胞コロニーは、培養中の任意の時点で使用するために収集され得る幹。細胞が通過する準備ができたら、通常この問題が発生した(プロトコル5を参照)。このプロトコルは、96ウェルの幹細胞コロニーのプレートから11列を収穫する方法を説明します。
- 全く汚染がないことを確認するために顕微鏡下で96ウェル幹細胞コロニープレートを調べます。
- 傾斜、37°Cランプのベッドの3位に96ウェル幹細胞コロニーのプレートを置きます。
- ロード列RT 200μlのピペットチップとのベッドの1位の先端装着ラックに11と12。
- ベッドの2位に4ウェルトラフを配置します。
- 空トラフウェル1のままにしておき、十分に3.5ミリリットルの30%タンパク質分解およびコラーゲン分解解離試薬(またはEDTAベースの解離試薬)を入れ、よく2で8.5ミリリットルSCGMを置きます図3は、ウェル4に4.5ミリリットルのPBSを入れました。
注:すべての試薬は室温または37℃であることができます。 - PLHRで96ウェル幹細胞コロニープレート蓋と場所を削除します。
- ロボット制御、タッチパッドを使用して、ボタンの次の組み合わせを押します。
- 「プロトコルの実行」をタップします。
- 「コロニーハーベスト列2-12」を選択し、[次へ]をタップします。
- ユーザ決定:選択したプログラムを事前にテストするためのステップバイステップのウィザードを使用するには、「テストの実行」をタップします。
注:ロボットは実行されませんが、むしろソフトウェアは、ソフトウェアの問題のためのプロトコルをテストします。確立されたプロトコル、タッピング、「設定をスキップ」で許容可能です。 - 「実行プロトコル」をタップします。
注:収集手順が完了すると、細胞がトラフウェル2内にあり、コレクションの準備ができます。
結果
プレートの展開は、ロボットの幹細胞培養プラットフォームをベース。
性IPSCのための需要は、薬剤開発や再生医療におけるそれらの有用性に成長しています。まだスケーラブルな生産は、多くの研究者を除外し、確立された接着性の培養方法から分岐し、比較的複雑な装置で懸濁培養32に焦点を当てています。大幅にこのような浮遊培養への切り替えまたはマイクロキャリアを使用するなど、実績のあるプレートに基づく幹細胞培養法を変えるのではなく、私たちは、既存の接着性iPS細胞培養技術を小型化し、自動化に焦点を当てました。最初の目的は、全培養プロセスを標準化するために供給および継代を自動化することでした。既存の技術と迅速なスケールアップが可能なプラットフォームも必要でした。これらの目標を達成するための方法は、自動液体ハンドリングシステム( 図1)を利用し、96ウェルプレート中で培養幹細胞に考案されました。 PROT供給および通過のための液体処理ロボットとここで開発ocolsは技術者による遠心分離工程または連続的な監視を必要としません。これらのプロトコルは、2フィーダーフリーのiPS細胞株を用いて開発されました。脂肪細胞33からの線維芽細胞およびその他に由来するもの。
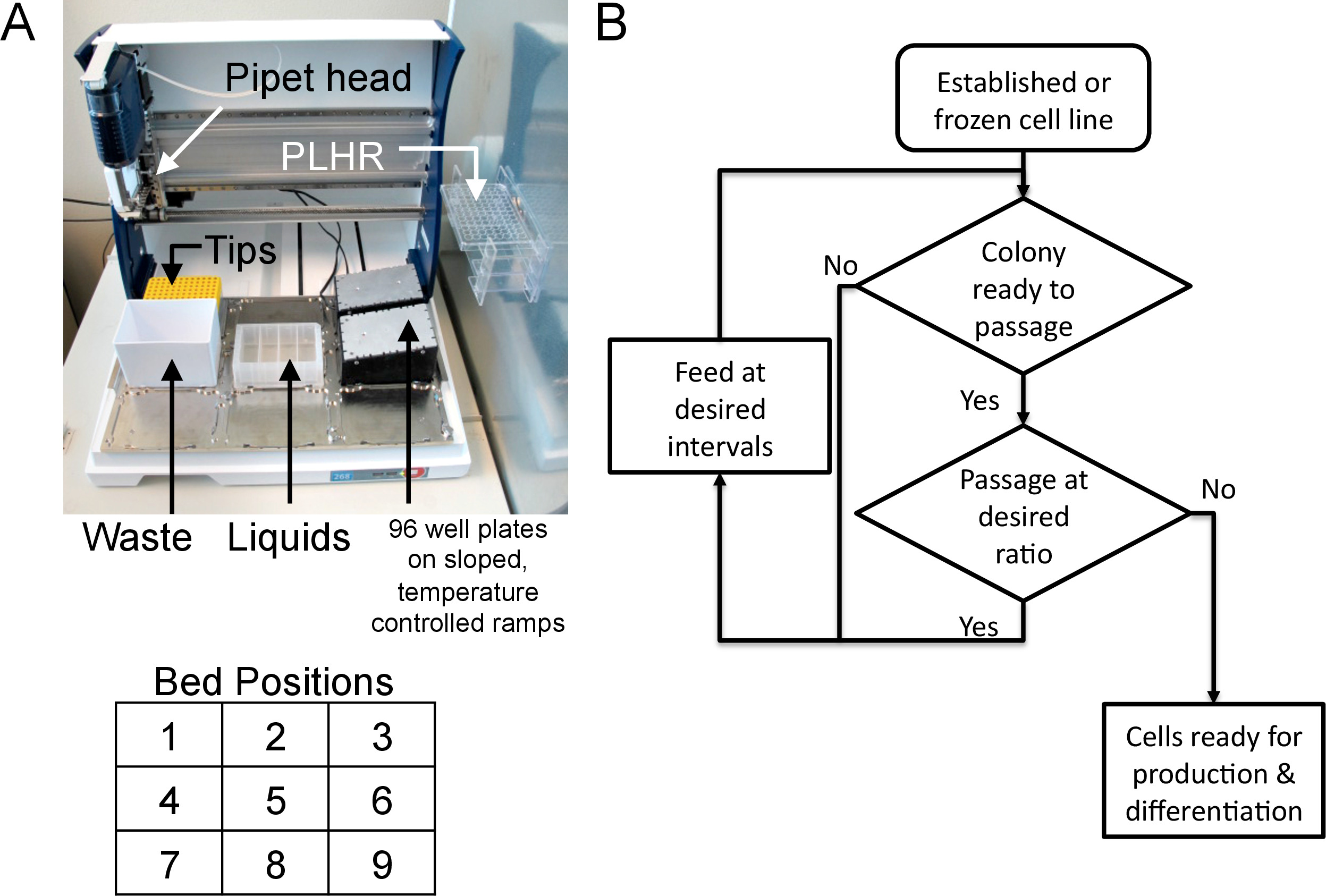
コンピュータ制御された液体ハンドリングシステム( 図1A)は、前面と背面に移動するフラットベッドで構成されています。ベッドは9、標準的な細胞培養プレート、液溜めおよびその他のカスタムハードウェアを受け入れるように圧力保持クリップと凹部の番号を付け、約5×3.3インチを持っています。ピペットヘッドが移動するだけでなく、上下(床運動に垂直な方向)左から右へ。一緒のベッドで、ピペットヘッドは、詰め替え可能なラックからピペットチップを拾った後、ベッドの上で任意の場所にメディアを削除するか、送出するようにプログラムすることができます。必要であれば、96ウェルのそれぞれは、クロスコンタミネーションを除去するために別々に維持することができます。本構成では、0〜200μlの培地をピペットヘッドの各先端により移動させることができるが、他のボリュームの範囲は、先端サイズに基づいて可能です。
標準プレート中の幹細胞を継代すると、酵素的または化学的解離は、典型的には37℃でのインキュベーションを必要とします。最初の試験は、タンパク質分解およびコラーゲン解離試薬または我々の2つの96ウェルiPS細胞株に対して生成さコロニーサイズの解離と均一に時間RTの両方よりも37℃でより良い実行EDTAベースの試薬と解離を確認した(データは示さず)。分割プロセスを自動化し、培養器の内外プレートの移動を回避するには、受け入れて、再現性の標準的な培養プレートを配置し、傾斜、温度制御されたランプは、( 図1A)に建設されました。ランプは、37°Cに加熱したときに、96ウェルプレートからのタンパク質分解およびコラーゲン解離試薬または性IPSCのEDTAベースの解離を、37℃のインキュベーターに入れ、プレートに匹敵した(データnOT)に示します。平板からの吸引が得られ、約10〜15マイクロリットルの残留量を残したのに対し、傾斜ランプは、ウェル内の最低点に達することによって(5μLの残量未満)ウェル全体の内容を収集するために、ピペットチップを有効にするために利用されましたセル損失で。傾斜ランプはまた、ウェルを洗浄し(粉砕し)ウェル傾斜の上部にメディアを吐出しておよび底部でそれを収集することができました。
96ウェルプレートフォーマットでの幹細胞の培養ロボット。供給および継代。
ロボット液体ハンドリングシステムを用いてiPS細胞の培養は、2つのフェーズを有します。通路と給電。コロニーが通過する準備ができたら、それが再び通過する準備ができている( 図1B)まで、一定の間隔で供給され、新たなプレートに播種するために所定の比率で分割されます。凍結または非96ウェル培養物を96ウェルフォーマットで開始し、すぐに通過/フィードを入力することができサイクル。プレートの大部分であるコロニーを、維持するために使用されていない細胞は、他の用途のために採取し、このシステムの製造·コンポーネントを表しています。
メディアの一部または全ては、培養期間後に除去され、廃棄物容器内に堆積されたときに、96ウェル培養性IPSCを給餌することは達成されます。その後、新鮮な培地は、同じプレートに分注します。ロボットは、新しいメディアとの馴化培地をブレンドを含む、完全にカスタマイズ可能な給紙のためのすべてのウェルを分離するための新しいヒントやメディアトラフを使用することができます。
幹細胞の典型的な経過は、しばしば遠心分離ステップの方法を必要とします。ここで説明するプロトコルは、解離を正常化し、遠心分離を排除することを目指しています。ロボットは37°Cの傾斜ランプ上に取り付け、96ウェルプレートに解離試薬を提供するとき通路プロトコルが開始されます。予め設定された時間の後、解離した細胞は、ユーザーが制御を持つ洗浄作用で収集されています位置、繰り返し、ボリューム、およびトリチュレーション速度オーバーL。酵素の時間、トリチュレーション速度と摩砕繰り返し数は解離コロニーの大きさと均一性( 図2)を変化させるのに十分であったが、各パラメータは、特定の細胞株の要件に合うように調整可能です。この制御は、変化率、位置、および繰り返しでピペット技術者によって導入された変動を除去します。解離細胞を回収し、新鮮な培地とリザーバーにプールされると、それらを新しいプレートに分配されます。基質分解または酵素作用による細胞死から遠心分離し、播種の問題を回避するために、解離試薬は信頼播種をもたらした許容可能な解離の最小点に希釈しました。この技術は、媒体34 mTeSR1中でのタンパク質分解およびコラーゲン分解試薬 のために効果的であった、比較的高いタンパク質含有量を有するだけでなく、低タンパク質培地中で効果的なエッセンシャル·8 35様、本システムと互換性があり、どちらも(E8データは示さず)。
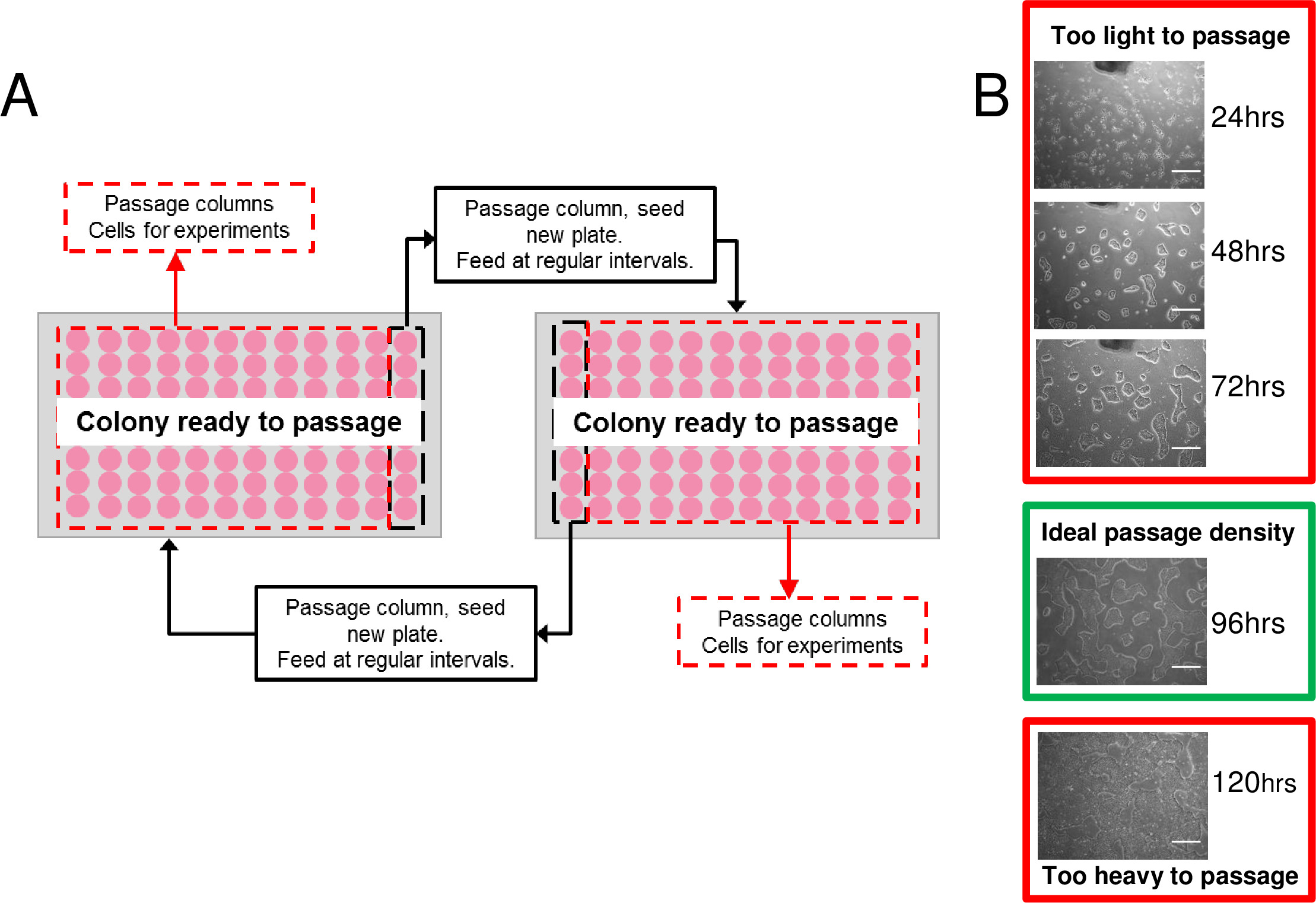
通過後の幹細胞の播種密度を制御することは日常的で成功した幹細胞培養に最も重要です。低すぎる、または高播種すると、不規則な通路間隔を引き起こすことに加えて、異所性分化および多能性の損失をもたらすことができます。 (6分割1)6ウェルプレートの1ウェル全体新しい6ウェルプレートに播種するために使用される典型的な幹細胞培養は分割比に依存します。液体ハンドリングロボットと、この比は、使用者のニーズに合うように調整することができる( 例えば 、1:6,1:9、1:12、 等 )、それが通過間隔に最も影響を与えます。ロボットは、経験的に決定されるべきユーザのニーズに応じて、以下の列一列全体(8ウェル)、または複数の列を収穫することができます。午前1時12分を分割するとき、脂肪および線維芽細胞由来のiPS細胞は、4日目に継代との定期的な3日間の給餌スケジュールを維持しました。この場合、一つの列を収集し、各サイクル( 図3A)と1:12の分割を作成つの新しい96ウェルプレートに播種するために使用されました。残りの11ウェルは、下流の用途に利用可能でした。これらの11の生産井を採取するために、通路プロトコルは細胞を収集するためのトラフに堆積した以外は同様にしました。あるいは、細胞をプレート上に残すことができ、直接使用します。
ルーチン分割スケジュールをカウントすることなく通過に一貫した播種密度通路を達成し、維持するために、私たちのプロトコルは、コロニーが通過するための理想的な濃度であるときに、同じ列の所定の数を分割するために呼び出します。ユーザーが通過するための適正な濃度を特定するには、一連の画像がハイライト理想的な通路密度( 図3B)で密度の範囲を示す生成されました。通過するタイミングを決定するために、技術者はそのプレートを調べ、濃度画像スケールと比較します。アイデア通路へリットル濃度は、脂肪および線維芽細胞由来のiPS細胞の培養物から決定され、ほとんどのコロニーとの間の空間は、隣接するコロニーの直径の約25%のときであることが見出されました。これは、コロニーが均一に分布されることが重要です。一つの追加の給餌サイクルが異所性分化のためのトリガーである、コロニー触れることになるため、コロニー分離のこの量は、最大の望ましい濃度に相関します。
ここで開発に必要なプロトコルは、96ウェルフォーマットでの培養を開始する方法と、密度の問題の後に文化をリセットする方法に対処します。新たな培養が開始されると、継代前最良播種密度と給電サイクル数は不明です。播種後に、使用可能な密度を確保するために、ロボットは連続希釈( 図4A)で96ウェルプレート全体の既存または解凍した細胞を分配します。このような勾配の例の結果は、 図4B-Eに示されています。いくつか投入後サイクルは、いくつかの列は、技術者が定期的に培養を開始するために均一に希釈し、プレートに播種するためにロボットを使用する点で分割するのに理想的な密度に近づきます。この密度勾配プロトコルはまた、不規則なプレートに規則的な通過間隔およびコロニーの均一性を回復するために使用されました。通路が遅れたり、見逃している場合は通路が早すぎる場合は、コロニーの密度が低すぎると、個々のコロニーが均等によく全体に分散されずに大きくなりすぎる場合がある、コロニー密度とサイズは、高くなりすぎます。密度勾配プロトコルは、これらの問題を解決し、ユーザーは、ウェルの理想的播種セットを選ぶことによって再起動することができます。
二つのiPS細胞株は、ロボット文化の3ヶ月後に多能性のままでした。
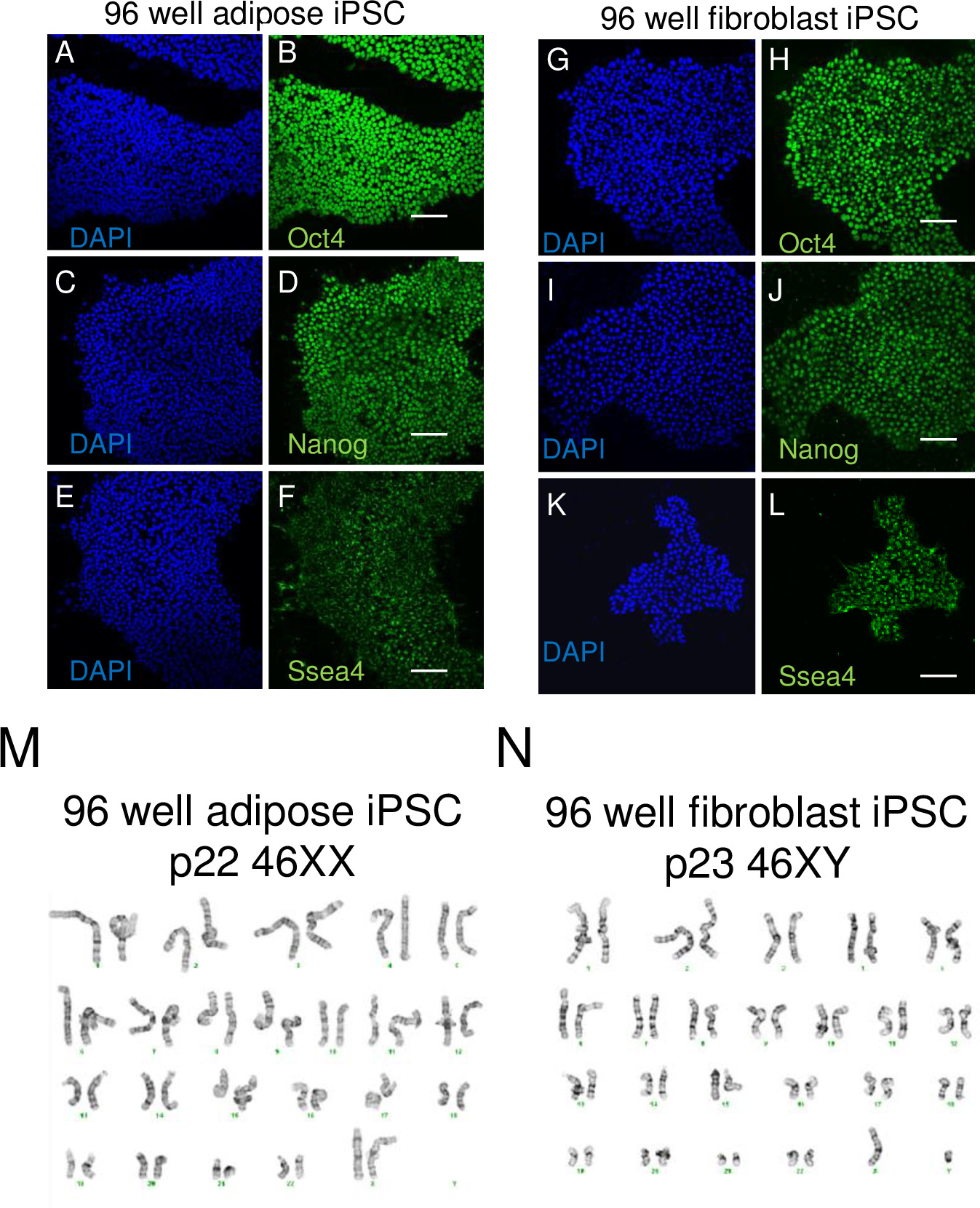
幹細胞の多能性の維持に悪影響培養条件36,37によって影響され得ます。脂肪および線維芽細胞がiPS細胞株(それぞれ-iPS細胞、F-iPS細胞)pluripを維持由来するかどうかを評価するために、otency、2行は3ヶ月間、上述した後、多能性マーカーを検討したように、ロボットハンドリング液体上で培養したときにロボット長期間96ウェルプレート中で培養しました。この期間の両方の回線を遠心分離することなく、タンパク質分解およびコラーゲン分解解離試薬でより大きい20回継代しました。 SSEA-4は、細胞表面( 図5A-L)で観察されたのOct4およびNanogについて染色し、iPS細胞およびF-iPS細胞株からの固定96ウェルプレートは、これらのマーカーの核内蓄積を示しました。 41 -これは、多能性IPSC 38のための以前の報告と一致しています。 DAPIで対比すると、三多能性マーカーについて陽性ではなかった追加の細胞を明らかにしませんでした。染色体異常は、一般的に、幹細胞培養42,43の間に観察されるが、 図5A-Lに示すような多能性マーカーの分布に影響を与えないことがあります。 Karyotype分析は、両方のロボット継代iPS細胞株は、ロボットの培養方法は、通常、( 図5M-N)に発生する可能性があるものを超えて染色体不安定性を導入しなかった示唆、46正常な染色体を持っていた明らかにしました。
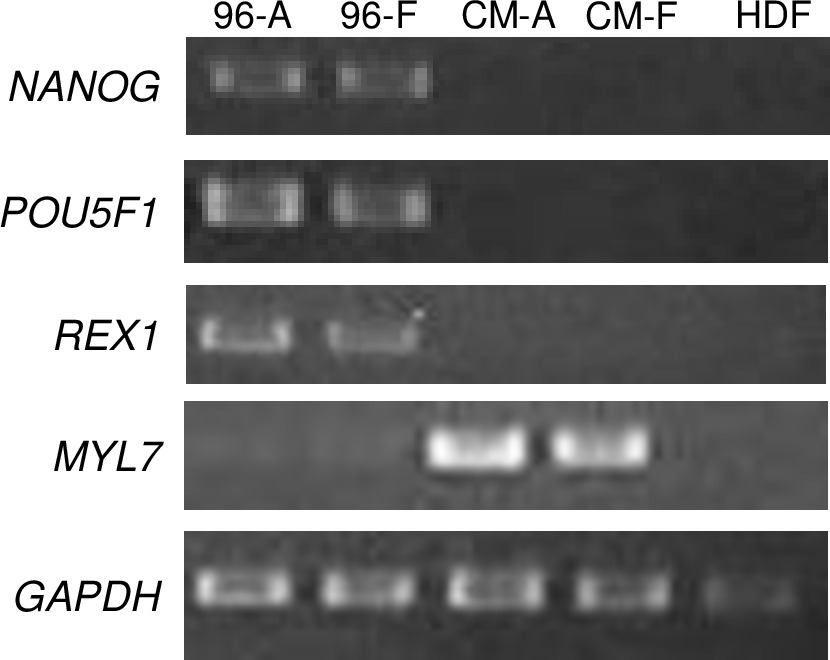
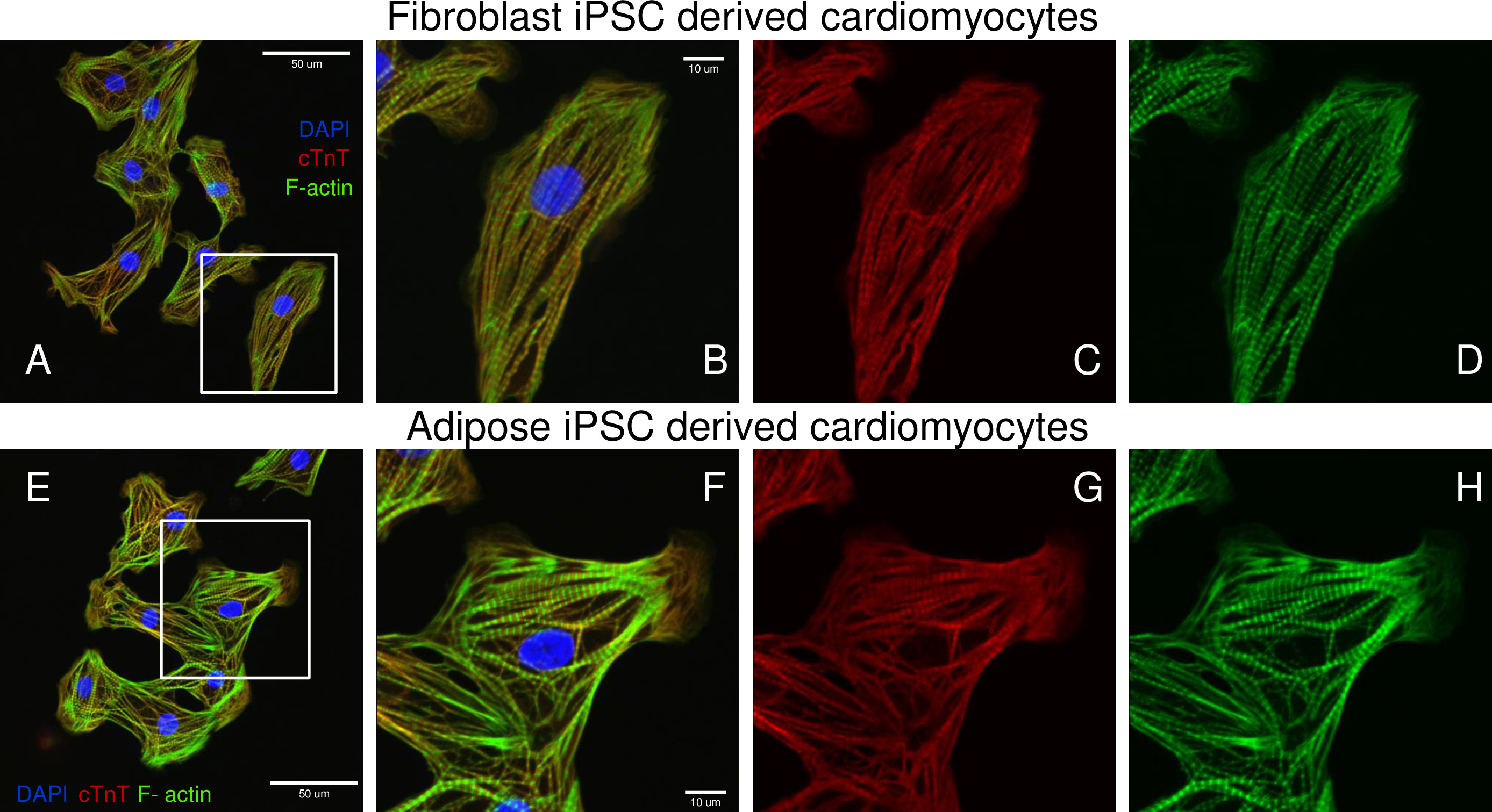
確立された幹細胞の遺伝子発現マーカーをロボット培養iPS細胞株における1,41,44,45を調べるために、全RNAを染色し、核型分析と並行して収集しました。両方の96ウェルプレートiPS細胞株は、各ラインから分化した心筋細胞はしなかったのに対し、多能性マーカーNANOG、POU5F1とREX1の類似表現を持っていた、また、(HDFを)( 図6)は、ヒト皮膚線維芽細胞の別の行をしました。両方の株に由来する心筋細胞がMYL7のHDFのに対し陽性であったと幹細胞がMYL7を発現しなかった。どちらのiPS細胞株は小分子と心筋細胞に分化させた、Wnt経路操作技術は、46最近記載します。染色された場合には、両方のラインからの心筋細胞はcTnTのは、明確な筋節形成( 図7)で陽性でした。 96ウェルフォーマットで心筋細胞への分化をウェルの80%以上に成功した(データは示さず)。一緒に、これらのデータは、3ヶ月を示唆しているとロボットカルチャーの20以上の通路が心筋細胞にも分化することが可能であった多能性と一貫性の転写プログラムを示す染色体が正常細胞をもたらしました。

ロボット幹細胞培養装置及び典型的なiPS細胞の培養ルーチンの概要を図1。96ウェル細胞培養幹ための典型的な床配置で示す(A)ロボット液体ハンドリングシステム。新しい滅菌ピペットチップ(先端)、取り外し可能な先端廃棄物容器(廃棄物)、マルチウェル必要液体試薬(液体)を保持するためにオートクレーブトラフは、96ウェルプレートが配置されているAN (ピペットヘッド)左/右に移動し、アップ/ダウンの8チャンネルのロボットピペットヘッドは、温度制御され、傾斜ランプ(96ウェルプレート)上に支持さdを。ラックを保持板蓋(PLHR)。下記表に示すベッド位置番号。摂食と航路:(B)ロボットiPS細胞の培養は、2つの段階があります。コロニー板が通路に準備ができたときにセル生産のサイクルが開始されます。ユーザーは、で通路に所望の比率を選択し、96ウェルプレートのロボットの種の新しいグループが再び通過させるための準備ができるまで、一定の間隔で供給されます。プレートを通過する準備ができたら、各プレートのほとんどは、その後のコロニープレートに播種するために使用されていないため、システムの生産段階を表す、他の用途に利用可能です。凍結または既存の細胞株は、いつでも導入し、フィード/通路サイクルに維持することができる。 この図の拡大版を表示するには、こちらをクリックしてください。
{kind=link}

図2のロボット液体処理パラメータはiPS細胞コロニーの解離特性を制御するために使用することができます 。各代表画像は、まだ96ウェル中に懸濁させながら、線維芽細胞由来のiPS細胞は、指示された処理後に解離を示しています。 (一番上の行、 - C)酵素の時間、無トリチュレーション。 96ウェルプレート中で増殖させた線維芽細胞由来のiPS細胞を行い、タンパク質分解およびコラーゲン解離試薬解離なしロボット摩砕の時間を増加させました。 (中段、D - F)粉砕して速度、3分の酵素。細胞は、タンパク質分解およびコラーゲン分解解離試薬処理の3分に暴露し、その後、175μlの増殖培地を適用し、各ウェルを指示された速度で上下回ピペッティングし。 μL/秒=マイクロリットルのPER二。 (一番下の行、G - I)粉砕して繰返し、3分の酵素、160μL/秒。細胞を、3分間、タンパク質分解およびコラーゲン分解解離試薬に曝露した、175μlの増殖培地は、その後160μL/繰り返し示された数のための秒で粉砕し、適用した。 この図の拡大版を表示するには、こちらをクリックしてください。
{kind=link}

図3.一般的な脂肪および線維芽細胞iPS細胞コロニーのメンテナンス方式及び経過に定期的な給紙/通路サイクルを維持するかを決定するためのコロニー密度の一連の画像。(A)通過に準備ができて、脂肪または線維芽細胞を96ウェルiPS細胞コロニーから始めて、セルの1列は、遠心分離することなく、ロボットに継代し、希釈しましたプレートを再び通過する準備ができていたまで、その後は特定の間隔で供給した12の新しい列に。細胞産生のために、コロニーを維持するために使用されていないカラムは、その後の使用のために継代し、収集しました。列の任意の数の膨張率を制御するために継代することができます。通路に、濃度一連の画像をキャプチャ24時間毎にユーザに提供されたときを決定する(B)。トップ赤いボックスで(最初の播種後72時間以内)コロニーは、通路に十分に緻密ではなく、供給されるべきです。密度が(〜96時間で)緑色のボックスに示されていることが一致した場合、コロニーは、通路のための理想的な密度です。 120時間では、コロニーは、通路にすぎ緻密で、このシナリオは避けるべきです。後者は、強くお勧めしますこの密度で播種密度勾配が、ルーチン培養で解決することができます。白バーが200μmに等しい。 大きなversiを表示するには、こちらをクリックしてくださいこの図の上。
{kind=link}

図4。96ウェルロボット培養システムは、ユーザーが凍結またはアクティブな細胞株から培養を開始し、播種勾配を実行することができます。(A)は、細胞液を凍結細胞ストックから、または積極的な文化を収穫した後、ユーザーが作成し、配置されていますロボットに。ロボットシステムは、列によって分配密度勾配で96ウェルプレートに沿って最初の細胞溶液を分配するために、連続希釈プロトコルを実行します。 (B - E)Aから12列の4からの細胞密度の例として、密度勾配播種プロトコル48時間後。白い線が225ミクロンに等しい。 これの拡大版を表示するには、こちらをクリックしてください図。
{kind=link}

。図5.多能性は、22(脂肪)または23(線維芽細胞)の通路(〜3ヶ月)のために、96ウェルロボット培養中の脂肪やiPS細胞株由来の線維芽細胞のために維持されている(A - L)脂肪および線維芽細胞由来のiPS細胞の細胞株は、ロボットでしたその後、DAPIの対比で多能性マーカーOct4の、Nanogの、またはSSEA4固定し、染色した22または23継代96ウェルプレート中で遠心分離することなく、本文中に記載されるように供給され、継代しました。白いバーは100ミクロンに等しいです。 (M - N)Aに記載されているものと並行培養物を、46染色体の正常な相補体を明らかにした核型分析のために提出された。 拡大版のOを表示するには、こちらをクリックしてくださいこの図F。
{kind=link}

図6.脂肪(96-A)および線維芽細胞(96-F)由来のiPS細胞は、多能性遺伝子の発現を維持し、96ウェルのロボット形式で20以上の継代培養し、心筋細胞に分化した。全mRNAは、両方のロボット培養iPS細胞株から抽出しました心筋細胞は、両方のラインから分化、ならびに、(CM-A =脂肪iPS細胞由来の心筋細胞、CM-F =繊維芽細胞iPS細胞は、14日の分化誘導後に回収し、心筋細胞由来)および多能性マーカーNANOG、POU5F1、REX1を探査するために、RT-PCRに使用します心筋マーカーMYL7とローディングコントロールGAPDH。ヒト皮膚線維芽細胞(HDF)は、収集され、非iPS細胞、非心筋細胞を対照として使用した。 クリックしてくださいここで、この図の拡大版を表示します。
{kind=link}

。図7.線維芽細胞と脂肪由来iPS細胞は、96ウェル長期ロボット培養後に心筋細胞に分化する能力を維持して(A - H)脂肪および線維芽細胞性IPSCは、心筋細胞に分化した20以上の継代のために、96ウェルのロボット形式で培養しました。 14日間分化誘導した後、96ウェルプレートに結合した心筋細胞はトロポニンT(赤)、F-アクチン(緑色)および核(青)の免疫染色用ガラススライド上に低密度で解離し、再プレーティングした。 表示するにはこちらをクリックしてくださいこの図の拡大版。
{kind=link}
p_upload / 52755 / 52755fig8.jpg "/>
図8. 96ウェルプレート幹細胞培養をスケールアップ。幹細胞の生産のスケールアップは、プレートの後続グループをシードするために使用されるプレートの数に依存します。ユーザは、各分割された機会にプレートの数が同じで継代することにより1つの製造レベルを維持する以上のプレートを播種することによって生産を拡大することができます。例えば、サイクル0において、1枚の96ウェルプレートは、12倍の拡張を作成する、12の新しいプレート(サイクル1)に継代されます。 12プレートの一方は12プレート(2サイクル1)の新しいセットに継代または複数のプレート(3サイクル2)を継代することにより拡張される場合には、この比率を維持することができます。通過中に、コロニーを維持するために使用されていない任意のプレートは、ダウンストリームアプリケーションに使用できます。コロニーのメンテナンスや他の用途のための132のために12:したがって、日常的に12プレートを継代すると、2つの通路のように多くの144のようなプレートが得られる可能性があります。">この図の拡大版を表示するには、こちらをクリックしてください。

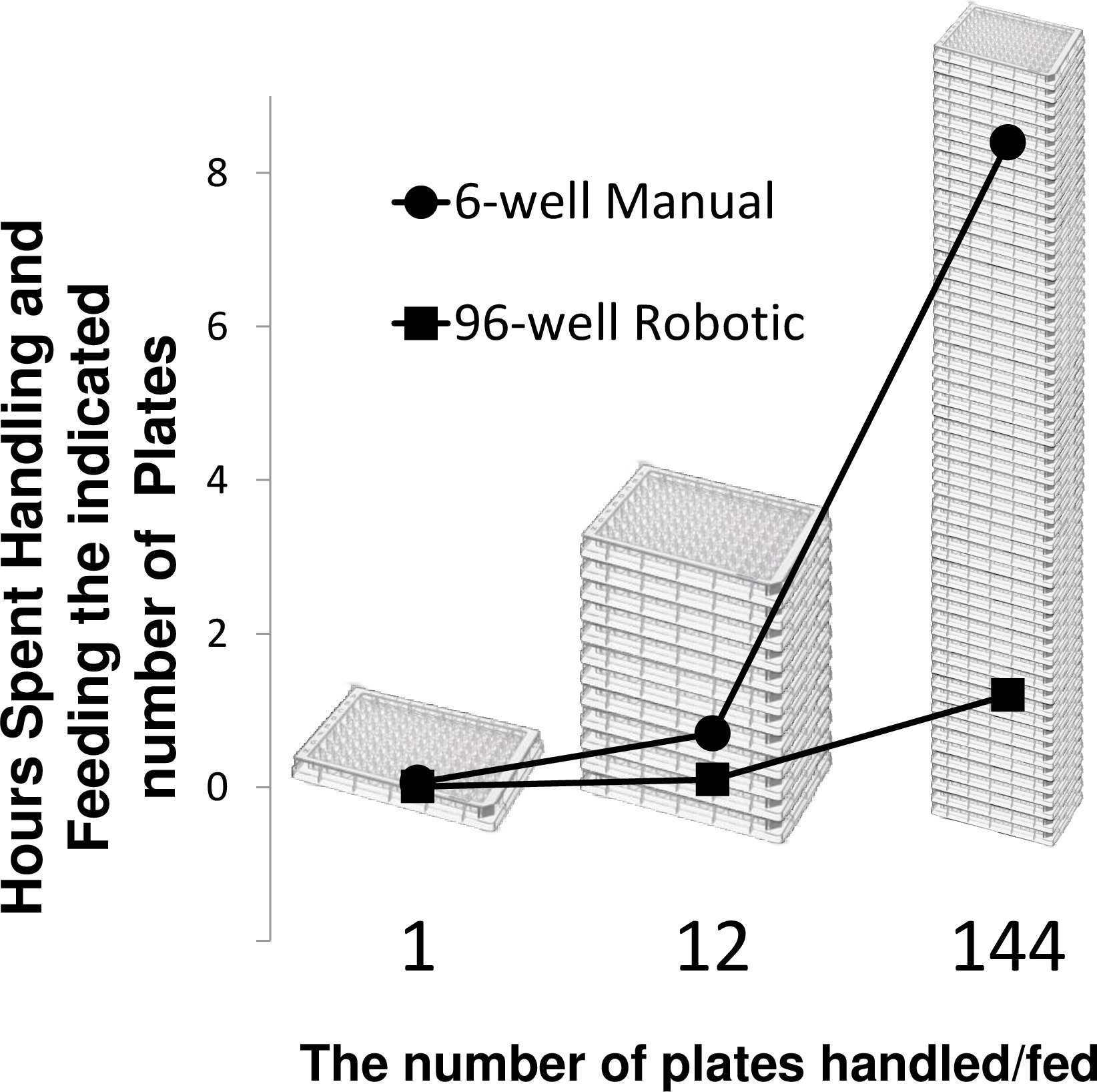
セル生産のための96ウェルプレートベースの文化の図9の効率が大幅に手動栽培を超えています。図8で述べたように、一方のプレートは、その後、144プレートに継代することができる12のプレートを、シードする継代することができます。膨張のこのレートは、二つの分割の機会で達成することができます。技術者は、彼らは顕微鏡でそれを調べて、ロボットにそれを置くために、1つの96ウェルプレートで約30秒を過ごす一方、1つの6ウェルプレートを養うために約3.5分かかります。技術者が144プレートを搬送している場合はロボットと供給時に手動文化が養うために、専用の8時間を必要とするのに対し、彼らは約1.2時間の処理プレートを過ごすことになります。 Vにはこちらをクリックしてくださいこの図の拡大版をIEW。
{kind=link}
ディスカッション
本研究では、小型化し、また効率的なスケールアップを可能にしながら、96ウェルプレートフォーマットで送り通路を自動化するiPS細胞の産生のためのロボット文化の方法を開発しました。液体ハンドリングロボットを日常酵素的解離によって、定期的にiPS細胞コロニーと通路にそれらを供給するために使用しました。ロボットはまた、細胞外マトリックスゲル被覆プレートを生成し、播種密度勾配を実行するようにプログラムしました。線維芽細胞と脂肪由来iPS細胞が20以上の通路、約3ヶ月間、このシステムで培養したときに安定した核型であったように、多能性は、維持されました。両方の細胞株は、心筋細胞に分化することができました。一緒に、ここに記載されたプロトコルのコレクションは、培養幹細胞に、非常に少ない幹細胞培養の経験、または特殊な培養装置へのアクセスが制限されたユーザを可能にし、高い細胞産生または最小限の労力とコストで扱うマルチラインを実現します。
ここで詳述ロボットのプロトコルは、iPS細胞の生産と処理の経済的なスケールアップのための方法を提供します。多能性を維持するために、49 -一つの利点は、ここで、以前に44,47を実証確立プレートベースのフォーマットでスケーラブルな幹細胞培養です。スケーラブルな幹細胞培養収率の多能性細胞の他の形式は、20,23,29、このプレートベースの方法は、適応のような懸濁液に培養形式の本質的変化、化学物質やRhoキナーゼ阻害剤20の長期使用を消泡を使用する必要がありませんが。培養条件が類似しているため、このプレートベースの方法は、したがって、急速に、そして予想通り、新しい行を収容することができます。病気のモデリングのための性IPSCの使用は4,6,19,50を増加すると、新しいiPS細胞ラインが連続して発生します。形式に移行する障壁がlであるため、ここで説明する技術は、高容量とスループットの培地中で培養新しい行に最も適していますOW。これはコロニーを維持するのに必要な労働力や設備についても同様です。形式と取り扱いが派生し、そのような指向分化などiPS細胞株、培養性能を検証するために使用される環境に類似しているため、最終的に、より予測可能である可能性が高いです。
図8は、96ウェルプレートにおける幹細胞産生のスケールアップのための1つの戦略を示す図です。一方のプレート(サイクル0)はロボット12の新しいプレート、12倍の増加(1サイクル0)を播種するために使用されます。給餌の数日後、12プレートの一方は、12プレート(サイクル2サイクル1)の別のセットをシードする継代されています。残りの11のプレートは現在、他の用途に利用可能であり、システムの生産要素を表します。このレートでは、一方のプレートの通過が11プレート毎サイクル、または3〜4日ごとに提供します。この方法は、二つのプレートがあり、サイクル3サイクル2からサイクル3への移行に示すように、複数のプレートが継代されている場合に、より拡張することができ常にコロニーを維持し、24の新しいプレートに播種するために使用されます。残りの22のプレートは、すべての通路サイクル後の使用のために利用可能です。メンテナンスサイクル中の任意の時点で、ユーザは、生産を増大させるために多くのプレートに播種することができます。一例は、通路に2つの成長サイクルのすべての列になります。第一通路12は、プレートに一方のプレートを変換して、12プレートの各々は、144プレートに播種するために使用されます。この場合、ユーザは、1つのプレートから始まり、2つの通路、または培養物の約1.5〜2週間後に、プレート144を有しています。例えば、線維芽細胞および脂肪iPS細胞株は、通路に96ウェルプレート当たり約25から75000000細胞の準備ができたときに得られます。プレート144は、従って、約4~7×10 9細胞を表すことができます。
ロボット144 96ウェルプレートを搬送するための労働負担とは何ですか?この仕事のための目標の一つは、細胞培養幹伝統的な( すなわち 、6ウェルプレート)に比べて労力を低減し、スケーラブルな幹細胞の産生しました。ロボットACComplishesこの物理的に供給および継代中に各プレートを処理する必要性を軽減することもできます。直線的に、それは伝統的な6ウェルプレートであろうように、96ウェルプレートの生産スケールが、技術者がプレートでの作業に費やす時間が有意に少なく、ロボット培養を使用しています。ロボット培養の生産効率は、この差( 図9)に由来します。これは、技術者は、インキュベーターから6ウェルプレートを取り外し、顕微鏡でそれを確認し、その後吸引し、約3.5分でプレートを養うことができるが見つかりました。対照的に、技術者は、約30秒インキュベーターから96ウェルプレートを取り外し、ロボット上に配置する前に、汚染密度用顕微鏡でそれを検査費やします。上記と同様の拡大給餌プロトコル六の96ウェルプレートを、約21分、またはプレートあたり3.5分をとる、ロード及び供給することができます。プレートを養うために、総経過時間はロボットと同等です技術者は、ロボットのための6つのプレート(プレートあたり30秒検査)を取り扱うだけで3分を費やしているのに対し、ICと手動方法が、手差しに6プレート技術者は、すべての21分のために必要とされます。 8手動で時間とロボットとは対照的に、 図9に示すように、技術者がロボットを使用して144板を扱うに費やす時間は約1.2時間である間違いは、プレートの取り扱いや液体を転送行うことはありません。
ここで説明した96ウェルiPS細胞の培養方法は、複雑なスクリーニング作業のための扱いやすいプラットフォームを提供します。各ウェルは、遺伝的に同一であり、同じ初期プールから同じ密度で播種するので、変数は、プレート全体に分散され、条件を分離する市販のリザーバを有するロボットによって維持することができます。これは、幹細胞を用いた幹細胞増殖培地の開発34,35,47、基板または培養条件の試験および毒性試験などの試験のために有用であろう51。各幹細胞系が最適なコロニーの大きさと通路の要件の点でユニークであるので、一つの通路と、給電周波数の間に、収穫の列を操作することにより、周波数と通過処理を供給する、播種密度を調節するために、機械的に攪拌し、このシステムを使用することができるに。これらの変数を反復すると、ユーザーはすぐに新しいラインの培養に適した条件のセットを見つけたり、新しい培養技術を開発することができます。ロボットシステム96はまた、平行であるが独立した幹細胞のコロニーを維持することができます。 iPS細胞は体細胞に由来するか、または遺伝子操作した後にクローン化されると、多くの並列のクローンは、潜在的なiPS細胞株を得るためにスクリーニングされます。単一細胞を、96ウェルプレートに播種した後、このシステムを供給することができ、それぞれのコロニーを維持する通路96ウェルプレートを分離しました。これは、潜在的なクローンを選択する際に、非常に高いスループットを可能にし、物理的に96本の平行線を培養することの困難を排除します。この方法はまた、材料は平行分析のために容易に利用可能であるようにllowsは、各クローンの産生をスケールアップ。最後に、我々は完全に自動化された文化を可能にインキュベーターにしてから、プレートを提供ロボットプレート輸送システムと、これらの培養技術を統合構想します。これは、ここで説明する基本的なプロトコルは、他のプレートベースのシステムに転送されているので、それ以上の拡張を可能にし、より複雑なロボットで達成することができます。
プロトコルに対処するための最初の重要なステップは、防止し、1.5と4.2の手順などの汚染を確認するものです。良好な無菌技術および常識が利用される場合汚染は、上述のように、うまく回避することができます。これは、オペレータの汚染のチェックと示されたステップで、このプロトコルではそうすることが著しく汚染のリスクを減少させることに関係なく、幹細胞培養フォーマットの、不可欠です。適切な細胞外マトリックスゲルアプリケーションは、第ESSありますこのプロトコルの全体的な成功にentialステップ。適切に96ウェルプレートをコーティングすることなく、幹細胞は増殖しないであろう。一般的な問題の1つは、不完全よくコーティングです。経験は、気泡、静電引力及び毛管作用が完了ウェルコーティングを妨げることが示されています。プリウエット工程(1.6)かなりよくボトムコーティングを改善するために開発され、スキップされるべきではありません。この予備湿潤段階は、細胞外マトリックスゲルコーティングが適用されたとき、それが均一にウェル底部と側面に分散されるようにプラスチックの96ウェルプレートの見かけの疎水性を減少させるように思われます。また、静かに一度でも外マトリックスゲル溶液の分布を確実にするためにコーティングされた清潔な手に対して96ウェルプレートをタップすることをお勧めします。解離パラメータも最適化することが重要です。酵素またはEDTAベースの解離試薬と拡張インキュベーションまたは通過中の目標であってもなくてもよい単一の細胞になります。したがって、オペレータ解離時間、摩砕力、および洗浄の繰り返しは、コロニー形態や健康に影響を与えるし、それに応じて調整する方法に特別な注意を払う必要があります。
ここに記載された技術に限界を理解することは、正常な動作に最も重要です。他の細胞培養の設定のように、96ウェルプレートを使用することは、比較的高い汚染リスクを提示します。上述したように、技術者は、摂食及び継代中に各プレートを処理しています。例えば、蓋を開けロボットベッドの上でプレートを入れて、顕微鏡にプレートをチェックするとき。ステップ1.5の後に述べたようにそのため、そのようなベッドの上で傾斜加熱ブロックまたは垂直ピンとして任意の板蓋の内側に触れたり、潜在的に汚染された表面に、この部分が露出しないが不可欠です。プロトコルを開発する際には、この制限は、発見され、無菌性を維持するために、プレートの蓋を保持するためのラックを開発するための原動力でした。同様に、トラフリザーバー、ピペットチップおよびo彼らは環境に開放し、技術者によって処理されるため、液体ハンドリングロボットベッドの上THER供給が汚染源となる可能性があります。したがって、良好な滅菌技術は、露出した培養材料またはオープン液体の上の動きを減少させるものとして適用されるべきです。別の制限は、プロトコルが視覚的に> 100 96ウェルプレートの各ウェルをチェックし、スケールアップされたときに面倒であるということです。これは、疑わしいウェルを同定するために、このような混濁媒体として、視覚的に汚染の兆候をプレート全体を検査することによって対処することができます。将来のスケールアップのために、細胞の増殖および潜在的な汚染の自動顕微鏡とインジケータの使用が組み込まれます。
要約すると、ここで説明した高スループットの96ウェルベースのプラットフォームは、プレート形式での幹細胞培養および生産のための再現性、高忠実度の方法を提供しています。この方法は、細胞培養しばらく幹専用の必須の経験、必要な設備と労働時間を削減します従来の接着培養の利点を維持します。
開示事項
の構想、ここでは説明ロボットのプロトコルを開発し、著者MKC、MJG、EEB、NJD及びROまたはInvivoSciencesの開発従業員の時にあったされ、INC。 TWはInvivoSciences INCためCSOである。SHはギルソン社の従業員です。
謝辞
この作品は、NIHの助成金、R44 GM087784とR01 HL109505によって部分的にサポートされています。著者らは、拡張された技術的なサポートのためにギルソン、INCの技術およびOEMチームに感謝します。
資料
| Name | Company | Catalog Number | Comments |
| 96-well plates | Corning | 3596 | 96-well; Well volume: 360 μl; Cell growth area: 0.32 cm2; Individually wrapped |
| Seahorse Trough | SeahorseBio | 201308-100 | Reservoir 4 Clear Part Poly Proplene 73Ml 25/Cs |
| Gilson Tips | Gilson | F167023 | 10 racks gilson 96 tips D200 tips |
| DMEM/F12 | Life Technologies | 12500062 | DMEM/F12 powder. Resuspend in 1 L purified, cell culture grade water and sterile filter. |
| Growth Factor Reduced Matrigel | Corning | 354230 | Referred to as, "extracellular matrix gel" in the text. Matrigel GFR, 10 ml |
| mTeSR1 | StemCell Technologies | 5857 | mTeSR1 Complete Kit for hES Maintenance. |
| E8 Media | StemCell Technologies | 5940 | TeSR-E8 Kit for hESC/hiPSC Maintenance |
| Y27632 | AdooQ BioScience | A11001-50 | Rock inhinitor Y-27632 2HCI |
| Accutase | Innovative Cell Technologies | ACCUTASE | Referred to as, "proteolytic and collagenolytic dissociation reagent" in the text. Accutase 500 ml sterile cell solution |
| PBS | Fisher | SH30256FS | PBS w/o Ca Mg 500 ml, 6/pk |
| Gilson PIPETMAX | Gilson | PIPETMAX | http://www.gilson.com/en/AI/Products/13.290/Default.aspx#.VCGwRBZmYSk |
参考文献
- Takahashi, K., Okita, K., Nakagawa, M., Yamanaka, S. Induction of pluripotent stem cells from fibroblast cultures. Nature protocols. 2 (12), 3081-3089 (2007).
- Grskovic, M., Javaherian, A., Strulovici, B., Daley, G. Q. Induced pluripotent stem cells--opportunities for disease modelling and drug discovery. Nature reviews. Drug discovery. 10, 915-929 (2011).
- Shi, Y. Induced pluripotent stem cells, new tools for drug discovery and new hope for stem cell therapies. Current Molecular Pharmacology. 2, 15-18 (2009).
- Xu, X., Zhong, Z. Disease modeling and drug screening for neurological diseases using human induced pluripotent stem cells. Nature Publishing Group. 34 (6), 755-764 (2013).
- Kirouac, D. C., Zandstra, P. W. The systematic production of cells for cell therapies. Cell stem cell. 3 (4), 369-381 (2008).
- Ebert, P., Liang, J. W. Induced Pluripotent Stem Cells as a Disease Modeling and Drug Screening Platform. Journal of Cardiovascular Pharmacology. 60 (4), 408-416 (2012).
- Pa Lalit,, Hei, D. J., Raval, A. N., Kamp, T. J. Induced pluripotent stem cells for post-myocardial infarction repair: remarkable opportunities and challenges. Circulation research. 114, 1328-1345 (2014).
- Compagnucci, C., Nizzardo, M., Corti, S., Zanni, G., Bertini, E. In vitro neurogenesis: development and functional implications of iPSC technology. Cellular and Molecular Life Sciences. , 1-17 (2013).
- Yi, F., Liu, G. -H., Belmonte, J. C. I. Human induced pluripotent stem cells derived hepatocytes: rising promise for disease modeling, drug development and cell therapy. Protein & Cell. 3, 246-250 (2012).
- Mummery, C. L., Zhang, J., Ng, E. S., Elliott, D. a, Elefanty, aG., Kamp, T. J. Differentiation of Human Embryonic Stem Cells and Induced Pluripotent Stem Cells to Cardiomyocytes: A Methods Overview. Circulation Research. 111 (3), 344-358 (2012).
- Okano, H., et al. Steps toward safe cell therapy using induced pluripotent stem cells. Circulation Research. 112, 523-533 (2013).
- Scheiner, Z. S., Talib, S., Feigal, E. G. The Potential for Immunogenicity of Autologous Induced Pluripotent Stem Cell-derived Therapies. The Journal of biological chemistry. 289, 4571-4577 (2014).
- Sun, N., et al. Patient-specific induced pluripotent stem cells as a model for familial dilated cardiomyopathy. Science translational medicine. 4 (130), 130ra47(2012).
- Gunaseeli, I., Doss, M. X., Antzelevitch, C., Hescheler, J., Sachinidis, A. Induced pluripotent stem cells as a model for accelerated patient- and disease-specific drug discovery. Current medicinal chemistry. 17, 759-766 (2010).
- Zweigerdt, R. Large scale production of stem cells and their derivatives. Advances in Biochemical Engineering/Biotechnology. 114, 201-235 (2009).
- Serra, M., Brito, C., Correia, C., Alves, P. M. Process engineering of human pluripotent stem cells for clinical application. Trends in Biotechnology. 30, 350-359 (2012).
- Lock, L. T., Tzanakakis, E. S. Stem/Progenitor cell sources of insulin-producing cells for the treatment of diabetes. Tissue engineering. 13, 1399-1412 (2007).
- Jing, D., Parikh, A., Canty, J. M., Tzanakakis, E. S. Stem cells for heart cell therapies. Tissue engineering. Part B, Reviews. 14, 393-406 (2008).
- Soldner, F., Jaenisch, R. iPSC Disease Modeling. Science. 338, 1155-1156 (2012).
- Olmer, R., et al. Long term expansion of undifferentiated human iPS and ES cells in suspension culture using a defined medium. Stem cell research. 5 (1), 51-64 (2010).
- Wang, Y., Chou, B. -K., Dowey, S., He, C., Gerecht, S., Cheng, L. Scalable expansion of human induced pluripotent stem cells in the defined xeno-free E8 medium under adherent and suspension culture conditions. Stem cell research. 11 (3), 1103-1116 (2013).
- Chen, V. C., et al. Scalable GMP compliant suspension culture system for human ES cells. Stem cell research. 8 (3), 388-402 (2012).
- Amit, M., Laevsky, I., Miropolsky, Y., Shariki, K., Peri, M., Itskovitz-Eldor, J. Dynamic suspension culture for scalable expansion of undifferentiated human pluripotent stem cells. Nature protocols. 6 (5), 572-579 (2011).
- Olmer, R., et al. Suspension Culture of Human Pluripotent Stem Cells in Controlled. Stirred Bioreactors. Tissue engineering. Part C. 18 (10), (2012).
- Kehoe, D. E., Jing, D., Lock, L. T., Tzanakakis, E. S., Ph, D. Scalable Stirred-Suspension Bioreactor Culture. Tissue engineering. Part A. 16 (2), (2010).
- Oh, S. K. W., et al. Long-term microcarrier suspension cultures of human embryonic stem cells. Stem Cell Research. 2, 219-230 (2009).
- Chen, A. K. -L., Reuveny, S., Oh, S. K. W. Application of human mesenchymal and pluripotent stem cell microcarrier cultures in cellular therapy: achievements and future direction. Biotechnology advances. 31, 1032-1046 (2013).
- Yang, H. S., Jeon, O., Bhang, S. H., Lee, S. -H., Kim, B. -S. Suspension culture of mammalian cells using thermosensitive microcarrier that allows cell detachment without proteolytic enzyme treatment. Cell transplantation. 19, 1123-1132 (2010).
- Zweigerdt, R., Olmer, R., Singh, H., Haverich, A., Martin, U. Scalable expansion of human pluripotent stem cells in suspension culture. Nature. 6 (5), (2011).
- Kami, D., et al. Large-scale cell production of stem cells for clinical application using the automated cell processing machine. BMC biotechnology. 13, 102(2013).
- Hussain, W., Moens, N., Veraitch, F. S., Hernandez, D., Mason, C., Lye, G. J. Reproducible culture and differentiation of mouse embryonic stem cells using an automated microwell platform. Biochemical engineering journal. 77 (100), 246-257 (2013).
- Tandon, N., Marolt, D., Cimetta, E., Vunjak-Novakovic, G. Bioreactor engineering of stem cell environments. Biotechnology Advances. 31, 1020-1031 (2013).
- Sun, N., et al. Feeder-free derivation of induced pluripotent stem cells from adult human adipose stem cells. Proceedings of the National Academy of Sciences of the United States of America. 106, 15720-15725 (2009).
- Ludwig, T. E., Bergendahl, V., Levenstein, M. E., Yu, J., Probasco, M. D., Thomson, J. A. Feeder-independent culture of human embryonic stem cells. Nature. 3, 637-646 (2006).
- Chen, G., Gulbranson, D. R., et al. Chemically defined conditions for human iPSC derivation and culture. Nature methods. 8 (5), 424-429 (2011).
- Kinney, M. A., Sargent, C. Y., McDevitt, T. C. The multiparametric effects of hydrodynamic environments on stem cell culture. Tissue engineering. Part B, Reviews. 17, 249-262 (2011).
- Villa-Diaz, L. G., Ross, A. M., Lahann, J., Krebsbach, P. H. Concise review: The evolution of human pluripotent stem cell culture: from feeder cells to synthetic coatings. Stem cells (Dayton, Ohio). 31, (2013).
- Park, I. H., et al. Reprogramming of human somatic cells to pluripotency with defined factors. Nature. 451 (7175), 141-146 (2008).
- Chambers, I., et al. Functional expression cloning of Nanog, a pluripotency sustaining factor in embryonic stem cells. Cell. 113 (5), (2003).
- Wright, A. J., Andrews, P. W. Surface marker antigens in the characterization of human embryonic stem cells. Stem cell research. 3 (1), 3-11 (2009).
- Thomson, J. a Embryonic Stem Cell Lines Derived from Human Blastocysts. Science. 282 (5391), 1145-1147 (1998).
- Mayshar, Y., et al. Identification and classification of chromosomal aberrations in human induced pluripotent stem cells. Cell stem cell. 7 (4), 521-531 (2010).
- Martins-Taylor, K., Xu, R. -H. Concise review: Genomic stability of human induced pluripotent stem cells. Stem cells(Dayton, Ohio). 30 (1), 22-27 (2012).
- Okita, K., Ichisaka, T., Yamanaka, S. Generation of germline-competent induced pluripotent stem cells. Nature. 448 (7151), 313-317 (2007).
- Aasen, T., et al. Efficient and rapid generation of induced pluripotent stem cells from human keratinocytes. Nature. 26 (11), 1276-1284 (2008).
- Lian, X., et al. Robust cardiomyocyte differentiation from human pluripotent stem cells via temporal modulation of canonical Wnt signaling. Proceedings of the National Academy of Sciences of the United States of America. 109 (27), E1848-E1857 (2012).
- Ludwig, T. E., et al. Derivation of human embryonic stem cells in defined conditions. Nature biotechnology. 24 (2), 185-187 (2006).
- Wang, L., Li, L., Menendez, P., Cerdan, C., Bhatia, M. Human embryonic stem cells maintained in the absence of mouse embryonic fibroblasts or conditioned media are capable of hematopoietic development. Blood. 105 (12), 4598-4603 (2005).
- Yu, J., et al. Induced pluripotent stem cell lines derived from human somatic cells. Science(New York, N.Y.). 318 (5858), 1917-1920 (2007).
- Kim, C. Disease modeling and cell based therapy with iPSC: future therapeutic option with fast and safe application. Blood research. 49, 7-14 (2014).
- Jung, E. -M., et al. Evaluation of developmental toxicity using undifferentiated human embryonic stem cells. Journal of applied toxicology: JAT. (February. , (2014).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved