
Method Article
極低温電子断層撮影の最適化戦略
要約
極低温電子断層撮影における大規模なデータ収集の需要の高まりには、高スループット画像取得ルーチンが必要です。ここでは、断層データ収集の時間効率とスループットを最大化することを目的とした高度な取得戦略の最近の開発を実装するプロトコルを説明します。
要約
極低温電子断層撮影(cryoET)は、生体試料の3D構造を近原の状態で研究する強力な方法です。現在の最先端のcryoETとサブトモグラム平均分析を組み合わせることで、断層構造再建中に複数のコピーに存在する高分子複合体の高解像度構造決定が可能になります。断層実験では、通常、重要な運用ランニングコストを備えたハイエンドの透過型電子顕微鏡によって得られる膨大な量のチルトシリーズが必要です。近年、自動データ収集ルーチンのスループットと信頼性は絶えず向上していますが、傾斜系列を獲得する対象領域を選択するプロセスは簡単に自動化できず、ユーザーの手動入力に依存しています。そのため、大規模なデータ収集セッションのセットアップは、チルトシリーズ取得に利用可能な顕微鏡残り時間を大幅に短縮できる時間のかかる手順です。ここでは、このプロトコルは、グリッドスクリーニングと大規模なチルトシリーズデータ収集の時間効率を大幅に向上させるシリアルEMパッケージとPyEMソフトウェアに基づいて最近開発された実装を記述しています。このプロトコルは、SerialEM スクリプト機能を使用して、グリッド マッピング、グリッド スクエア マッピング、およびチルト シリーズの取得を完全に自動化する方法を示しています。さらに、このプロトコルは、自動データ収集が開始された後に、PyEMを使用して、オフラインモードで追加の取得ターゲットを選択する方法を説明しています。このプロトコルを例示するために、Sars-Cov-2チルトシリーズのハイエンドデータ収集の文脈におけるその応用について説明する。提示されたパイプラインは、収集対象の目標を慎重に選択すると同時に大量のチルトシリーズを必要とする断層撮影実験の時間効率を最大化するのに特に適しています。
概要
極低温電子顕微鏡(cryoEM)法は、高速ガラス化後の透過型電子顕微鏡(TEM)による生体試料のイメージングに基づくものであり、試料の分子構造と細胞構造をほぼ天然および水和状態に保つサンプル調製プロセス1,2。極低温電子断層撮影(cryoET)では、異なる配向から同じ関心領域の画像を多数取得することによってガラス化サンプルの3Dモデルが達成され、いわゆるチルト系列、続いて断層体容積3の計算再構成が行われた。この高度なイメージング技術は、彼らのネイティブ細胞環境4、5、6の文脈で生物学的プロセスの構造調査のための強力な方法に成熟した。
ガラス化試料の超構造解析に加えて、断層体積内の複数のコピーに存在する高分解能の高解像再構成は、サブトモグラム平均5を適用することによって得ることができる。この再構成アプローチは、目的の構造を含むサブボリュームの反復アライメントおよび平均化に基づいており、最終的な再構成7,8の信号対雑音比および分解能を高めることを目的としている。サブトモグラム平均化は、運用運用コストの厳しいハイエンドのTEMを使用して、数百のチルトシリーズの獲得を必要とする大量のデータの収集と処理に依存します。
現在、このような自動 cryoET セッションのセットアップは、通常、ユーザーの手動入力9、10、11に依存する時間のかかるプロセスです。通常、ターゲットは、マップされたグリッドの目視検査によって識別され、その後、自動データ収集用に設定されます。獲得点の同定におけるユーザの効率は、サンプルの性質に影響されることが多く、最適でない濃度で精製された高分子を分析する場合、または混雑した細胞環境内での稀な事象の場合には特に困難になり、相関アプローチ12の使用を示唆する。さらに、現在のワークフローでは、セットアップ時に画像をさまざまな倍率で取得する必要があり、後で自動取得11、13、14の間にターゲットの正確なローカリゼーションとセンタリングに使用されます。これらの高精度の再調整ステップは、高倍率でのイメージングを要求し、結果として得られる小さな視野内で対象領域を保持するための正確なセンタリングステップを必要とする高解像度アプリケーションにとって重要です。全体として、TEM がチルトシリーズの取得に従事していないこの時間のかかる手順に対して、各データ収集セッションの数時間がコミットされます。したがって、必要なチルトシリーズの量に応じて、取得ポイントの識別とセットアップは、cryoETセッション中にデータ収集に利用できる顕微鏡時間に大きな影響を与える可能性があります。
ここでは、SerialEMソフトウェアパッケージ15とPyEMソフトウェア16をベースに最適化されたプロトコルで、グリッドをマッピングし、グリッドの正方形をマッピングし、ターゲットを選択し、大規模なチルトシリーズコレクション用に自動データ集録を設定します。このアプローチの重要な概念は、ターゲットの正確なローカリゼーションとセンタリングのために、取得項目(仮想マップと呼ばれます)ごとにPyEMによって計算的に生成された画像をシリアルEMに提供することです。実際の取得時間を得るために、ターゲットの選択と仮想マップの作成は、SerialEMの2番目のダミーインスタンスを使用してオフラインで実行され、取得対象の選択プロセスをTEM操作から切り離します。データ品質13、17、またはチルトシリーズ取得18、19の速度を上げる方法を扱わないが、このプロトコルは、主に大規模な自動cryoETセッションの設定の時間効率を最適化するための戦略に焦点を当てています。したがって、提示されたプロトコルの実装は、傾斜シリーズの取得に利用可能な顕微鏡時間を増加させることによって、自動データ取得の歩留まりを最大化することを望むcryoETデータ収集ワークフローを確立する科学者のためのものです。
プロトコル
ここで説明するプロトコルは、EMBL CryoEMサービスプラットフォームによって作成されたより包括的な文書の一部であり、サンプルローディング、グリッドマッピング、顕微鏡チューニング、取得ポイントの設定、自動データ収集など、典型的なcryoETセッションの手順全体を示す徹底的なステップバイステップの手順とスクリーンショットが含まれています。完全なプロトコルは次のリンクからダウンロードすることができます: https://oc.embl.de/index.php/s/9OuTl8AazDkCNq0/download
1. 前提条件
- SerialEM バージョン 3.8 をインストールし、マイクロスコープと検出器 (http://bio3d.colorado.edu/SerialEM/betaHlp/html/setting_up_serialem.htm) を制御するようにセットアップします。
- シリアルのインスタンスをインストールします 3.8 (https://sphinx-emdocs.readthedocs.io/en/latest/serialEM-note-setup-dummy.html)。
- PyEM (https://git.embl.de/schorb/pyem) をインストールします。
2. グリッドマッピング
- グリッド付きのカセットを顕微鏡のオートローダーに積み込みます。
- グリッド全体のマッピングに適したイメージング条件を設定します。使用される検出器の視野を考慮して可能な限り低い倍率でこれを行います(EFTEM SA 2250x)。イメージング条件を シリアルEMイメージング状態 として保存し、後で使用しやすくします。
- 完全なモンタージュを設定する
- シリアルEM ナビゲータメニューを 開きます。
- [モンケージとグリッド]を選択します。
- [ 完全なモンタージュの設定] を選択します。
- スクリプト Grid_Mappingを起動します。スクリプトは、オートローダーが冷却されるまで待機します。インベントリを実行し、インベントリ プロシージャで検出された各グリッドをマップします。 チルトシリーズメニュー からメールを入力すると、スクリプトが完了したときにメールを簡単に送信できます。
- ナビゲータの保存 :
- SerialEM ナビゲーターからすべてのグリッド マップを検査し、より高い倍率で、さらにマップするグリッドを選択します。
メモ: オートローダー システムを搭載した多くの TEM は、再ロード時にグリッドの回転を表示します。再読み込み後に、すべてのグリッドを再マップすることをお勧めします。代替システムは通常、一部のシフトしか受けず、シリアルEMでは マーカーへのシフト 手順で修正できます。
3. シリアルEM低線量を設定します。
- シリアルEM低線量 ビュー と プレビュー モードの倍率を設定します(手順6に必要です)。
- ビューイメージを取得し、ナビゲータにマップとして保存します。
- プレビュー画像を取得し、ナビゲータにマップとして保存します。
- 両方のモードを同じビンに設定します(ビニング 4 が推奨されます)。これにより、2 つのマップを 1 つのイメージ スタックに保存できます。
- SerialEM ナビゲータ ウィンドウで、ビュー マップのラベルを [表示] に変更し、[プレビュー] マップのラベルを [プレビュー]に変更します。
- ナビゲーターファイルを保存して閉じます。
注:初期 のビュー と プレビュー の画像にはターゲットは必要ありません。
4. グリッドの正方形のマッピング
- グリッドの正方形をマップするイメージング条件を設定します。興味のあるサンプルと受託者のビーズ分布を見ることができることは非常に重要です。グリッドの正方形マップのコントラストを最適にするには、次の手順を実行します。
- 目的絞りを挿入します。
- 該当する場合は、エネルギーフィルタスリットを挿入します。
- -100 μm のデフォーカスを使用してください。
- さらなるマッピングに適した良好なグリッドの正方形のためのスクリーン。グリッドマップから正方形を目視で確認した後、グリッドスクエアマップに使用する画像条件を持つ正方形のテスト画像を撮影します。
- 良い正方形が識別されたら、SerialEM ナビゲータの ポイント 追加機能を使用して、グリッド マップ イメージの中心をマークします。
- すべてのポイントが追加されたら、シリアルEMナビゲータで最初のポイントで Shift + A キーを押し、最後のポイントで Shift + A キーを押します。
注: 追加されたすべてのポイントは A でマークされ、すべての取得ポイントになります。 - 最初の点で Shift + N キーを押します (項目に新しいファイルを作成する) を押し、最後の点でもう一度押します。表示されるダイアログで、[ モンタゲド画像] を選択します。
- モンタージュ ダイアログが表示されたら、1 つのグリッド四角形をカバーするモンタージュ サイズを設定します。これは、使用されるグリッドの倍率とメッシュサイズに依存し、通常は2 x 2〜4 x 4モンタージュが必要です。シリアルEMがグリッド四角形ごとにすべてのファイルに便利に自動番号を付けられるように、番号(例squaremap_01.mrc)を付けて名前を付けます。
- シリアルEM ナビゲーター メニューを開いてグリッドマッピングを開始し、 アイテムの取得をクリックします。
- ポップアップメニューで、次のオプションを選択します。
- [ 大まかなユーセントリック] を選択します。
- [ マップ イメージの取得]を選択します。
- [ 最後に列のバルブを閉じる] を選択します。
- [ 終了時に電子メールを送信] を選択します。
5. ターゲットの選択
- ダミーの SerialEM インスタンスを開きます。これは、顕微鏡を制御する SerialEM PC 上で設定することも、両方のコンピュータがネットワーク接続を共有している場合は別の (サポート) PC 上で設定することもできます。
- 最初のグリッドの正方形がマップされたら、シリアルEMナビゲーターメニューオプション マージ を使用して、ダミーのSerialEMインスタンスのモンタージュを表示します。
- 「ナビゲータ」ウィンドウをダブルクリックして、グリッドの正方形マップを開きます。
- マップを検索し、[ポイントを 追加 ] のダミーの SerialEM ナビゲーター オプションを使用して、対象のターゲットに画像取得ポイントを追加します。
- 新しい正方形をマッピングした後、新しい正方形をマッピングした後、 ナビゲータ ファイルを保存し、もう一度ナビゲータをマージします。すべてのグリッドの正方形がマップされるまで続けます。
6. 仮想マップの生成
- もう一度、ナビゲーターファイルをダミーの SerialEM インスタンスとマージします。
- PyEM 仮想マップ スクリプトをダミーのシリアルEMメニュー から 実行ツールを実行し、 仮想アンカーマップを選択します。グリッドの正方形マップのサイズと量、およびビューマップとプレビューマップのビニングによっては、時間がかかる場合があります。
注: PyEM はコマンド ウィンドウを起動し、コマンド ウィンドウが終了すると自動的に閉じ、新しいナビゲーター ファイルを開くことができます。選択したポイントを含むモンタージマップごとに、PyEMは単一のマージされたマップとそのすべてのビューマップとプレビューマップを書き込みます。最後に、ナビゲータファイル名>_automaps.nav<という新しいナビゲーターファイルを書き込みます。
7. 顕微鏡のチューニング
- 顕微鏡のチューニングを確認します。顕微鏡の性能を適切に保証するために、データ取得に同じ倍率とビームサイズの設定を次の順序で使用します。
- CTF(ゼムリンタブロー)によるセリアレム コマフリーアライメント を実行します。
- 目的の絞りを挿入し、中央に配置します。
- CTF(自動スティグマテ)によってシリアルEM正しい乱視を実行します。
- GIF クイックチューン(スリットフォーカスのみ)を実行します。
注: ステップ 7.1.1、7.1.3、および 7.1.4 はより多くの線量速度を必要とすることがあるため、スポットサイズのみを変更する必要があります。ビームの傾きが原因で、音の音が間違っているため、ビームサイズを変更しないでください。手順 7.1.1、7.1.2、および 7.1.3 は、この一般に公開されているスクリプト (https://serialemscripts.nexperion.net/script/47) で半自動化されています。
8. ナビゲーターの設定
- シリアルEM で、新しいナビゲータファイル <ナビゲーマファイル>_automaps.navという名前で開きます。
注: V_yyyyはビュー マップであり、プレビュー マップ P_yyyy。プレビュー マップは[取得ポイント]に設定されます。 - SerialEM ナビゲータ ウィンドウで、すべてのAポイントの選択を解除し、最初のV_yyyyマップを選択します。
- 最初の V_yyyy 位置を選択し 、Shift + Tキーを押してから最後の V_yyyy 位置を選択し 、Shift + T キーをもう一度押します。
- ファイルのプロパティで [単一フレームイメージ ]を選択してダイアログを開きます。
- 次の[ファイル プロパティ]ダイアログで、イメージングのニーズと計測器の設定に応じて、必要なパラメータを選択します。
- プロンプトが表示されたら、番号 (例: TS_001.mrc) の名前を指定し、[ 保存] をクリックします。
注: SerialEM は、すべてのチルトシリーズのファイル名に自動番号を付けます。 - 最初の TS 位置に傾斜シリーズ コントローラを設定します。完了したら、この取得項目の後にすべてのチルトシリーズにこれらのパラメータを設定するには、[OK]をクリックします。すべてのプレビュー マップが、番号付きのファイル名TS_xxx.mrcのTS (チルト シリーズ) として選択されるようになりました。
注:後で、ナビゲーター TSparams 機能を使用して手動でパラメーターを変更できます。変更は、リスト上のすべての項目に適用されます。ユーザーは、傾斜系列の代わりにカスタム スクリプトを実行するオプションがあります。
9. フォーカス/トラック位置を設定する
- 必要に応じて、各ターゲットのフォーカス/トラック距離を設定します(SerialEM 低線量 がオンになっていることを確認してください)。
- マップの表示をダブルクリックして読み込みます。
- [ナビゲーター] リストで [マップのプレビュー ] を選択します。
- 「ナビゲータ」ウィンドウで「 フォーカスの編集 」を選択します。
- 低線量コントロールパネルで、[領域間軸を回転]をオフにして、ステージの傾き軸に沿って[試行とフォーカス]を配置します。
- ロードされたビューマップの目的の領域をクリックして、このチルトシリーズのフォーカス/トライアル位置を設定します。
- ナビゲーター項目に TSP が設定されていることを確認します。すべての項目に対して手順を繰り返します。
注: フォーカス/トラックの位置はナビゲーターで自動的に下方にコピーされます。したがって、前の項目のフォーカス/トラック位置が正しい側と正しい距離にある場合、現在の項目に対して変更する必要はありません。
10. 追加のスクリプトを設定する
- 2 つのスクリプトは、フォーカス範囲を処理します: 前トモ と 中トモ. 前走 スクリプトは、各チルトシリーズの前に実行され、各チルト中 に、一時スクリプト が実行されます。
- スクリプト の前計でフォーカス範囲を編集します。
- SerialEM チルトシリーズメニュー で、TS でスクリプトを実行 をチェックして 、スクリプトのスクリプト番号を 選択します。
11. 実行
- 窒素タンクのレベルを確認してください。
- オートローダー ターボオフが選択されているかどうかを確認します。
- データストレージの空き容量を確認してください。
- SerialEM ファイルメニューで、ログファイルの連続保存の選択を解除し、現在開いているログファイルをすべて閉じます。各チルトシリーズは、独自のログファイルを取得します。
- ナビゲーターメニューで、 アイテムの取得 をクリックします。
- スクリプト PreTomoを実行します。
- [主タスク] 傾きシリーズを取得する を選択します。
- [PostTomo の後でスクリプトを実行する] を選択します。
- [ 最後に列のバルブを閉じる] を選択します。
- [ 終了時に電子メールを送信]を選択します。
- [GO]をクリックします。
注:シリアルEMは、成功またはエラーのいずれかのチルトシリーズごとに電子メールを送信します。しかし、エラーはフルチルト範囲に達していないことを意味します。
結果
この手順は、Turonova ら 202020に記載されている Sars-Cov-2 チルトシリーズを取得するために使用されました。データセット全体は、EMBLハイデルベルクでの3つの顕微鏡セッションで3つの異なるグリッドを使用して作成されました。現在の調査では、最初のグリッドでの最初の 3 日間 (~72 時間) のセッションに焦点を当てて説明します。
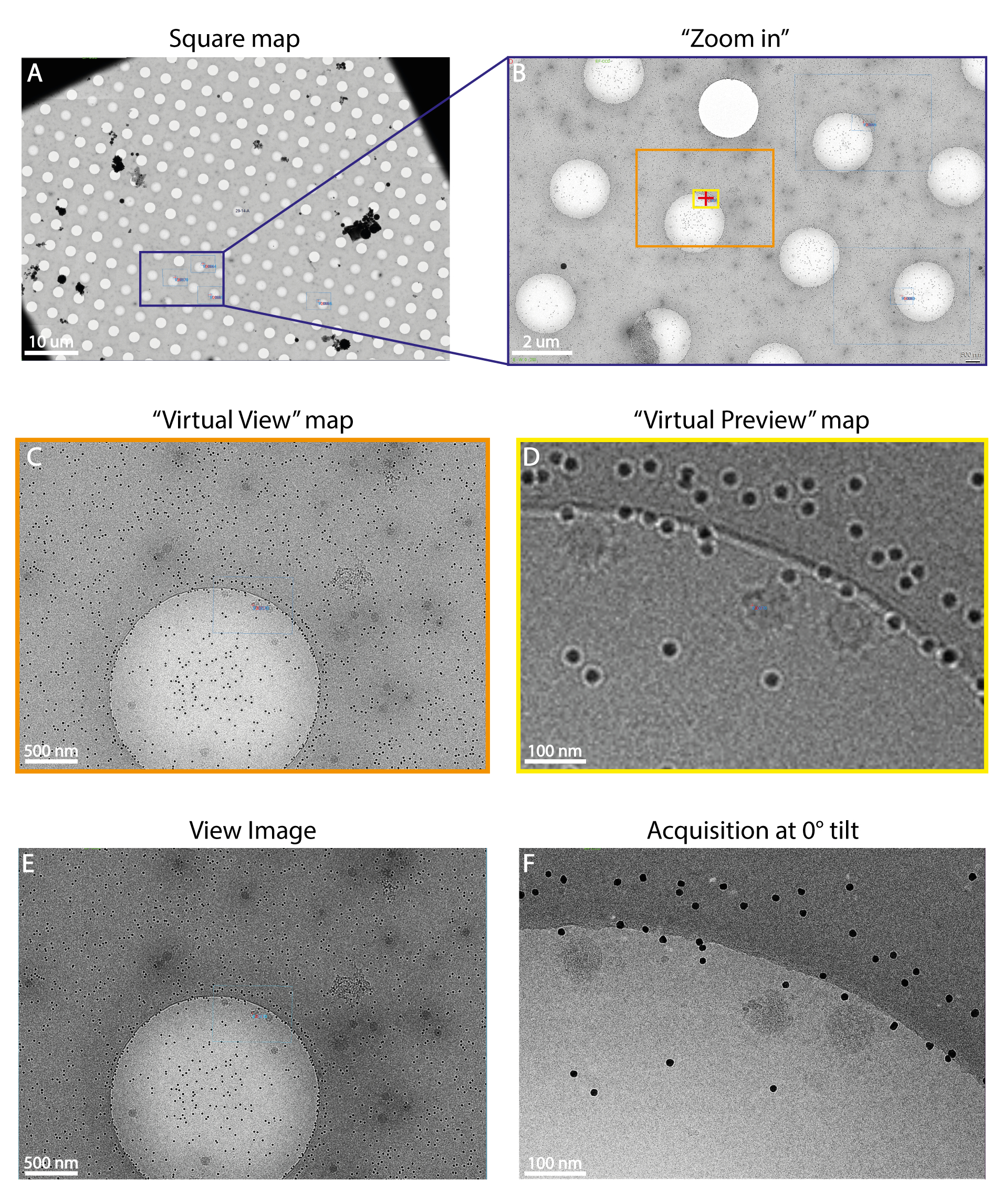
グリッド全体が低倍率でマッピングされた後(〜10分、ステップ2を参照)、71の適切な正方形がグリッドマップ上で選択され、中拡大マップ(正方形マップ)が、この場合の目的のサンプル、コロナウイルスの直接可視化と識別を可能にする設定(拡大、露出、焦点解除)で取得された(図1A)。取得時間は1四角あたり〜3分、合計で3時間45分であった。
最初の正方形マップが作成されるとすぐに、ダミーのSerialEMインスタンス(カメラや顕微鏡上の制御なし)を別のコンピュータ上で開いて、正方形マップを視覚化し、チルトシリーズの取得に適したターゲットにポイントを追加します(ステップ5を参照)。新たに取得した正方形マップは、取得する SerialEM インスタンスから現在のダミーの SerialEM ナビゲーターをナビゲーターとマージすることによって取得されました。グリッドの正方形の取得と選択の〜2時間後、50の初期ターゲットを特定することができました。
正方形マップの取得が完了した後、SerialEM 低線量が設定され、 参照View と プレビュー 画像が撮影され、マップとして保存されました(ステップ3を参照)。後者のマップは、ダミーの SerialEM インスタンスですぐに使用して、対応する正方形のマップ イメージ から、選択 した 50 個のターゲットの仮想ビュー (図 1C)と 仮想プレビュー (図 1D) マップを生成し、処理時間は ~30 分 (ステップ 6 参照) します。ダミーのSerialEMセッションでのこの処理時間は、取得のための顕微鏡の最終準備を行うために使用されました: エネルギーフィルターの調整, 新しいカメラゲイン参照画像取得, 乱視 - および対物レンズの昏睡自由なアライメント.
顕微鏡のチューニングが完了し、50の初期ターゲットから仮想マップが生成されると、取得に使用する実際のSerialEMナビゲーターを設定し(ステップ8を参照)、フォーカスとトラック位置を設定し(ステップ9)、チルトシリーズの取得を開始することができました(ステップ10と11を参照)。仮想ビューマップ(図1C)は、ターゲットの初期センタリング(図1E)に使用され、その後に仮想プレビューマップ(図1D)を使用して実際のチルト系列取得倍率で行われる最終的なセンタリング(図1F)に使用されました。
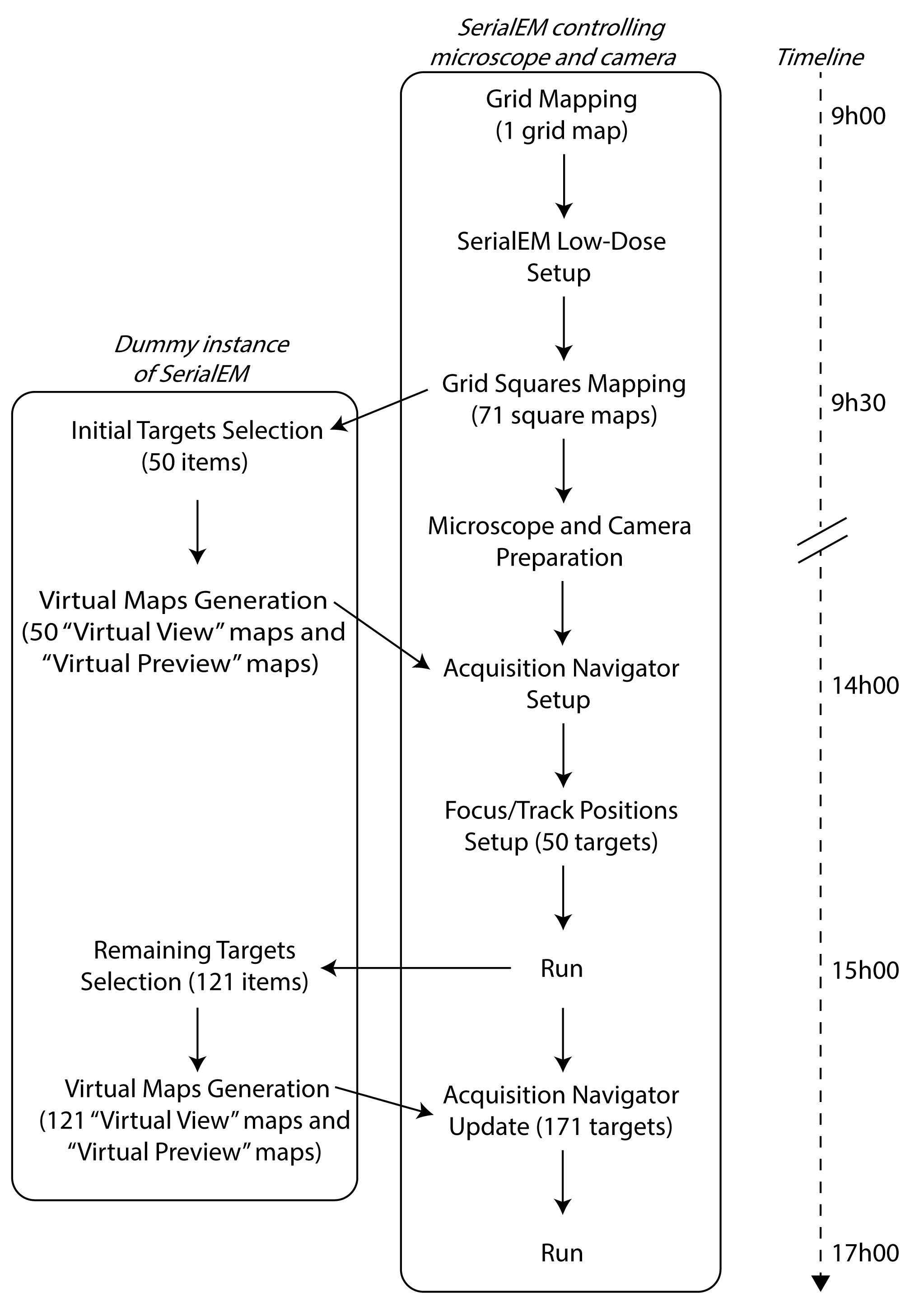
午前 9時30 分のグリッドマッピングから始まり、50の初期目標のチルトシリーズの獲得はおよそ 15:00に始まりました。断層撮影に使用される設定(詳細についてはリファレンスを参照)で、チルトシリーズは、一晩中実行するのに十分なターゲットを持つ、取得するのに〜20分かかりました。取得が実行されている間、残りの正方形のマップを検査し、ダミーのSerialEMインスタンスを介してオフラインで追加されたターゲットを追加することができました。残りの正方形マップの中から121以上のターゲットが選択され、72時間のセッションが完了するまで実行するのに十分な、これらの新しいターゲットに対して仮想マップが作成された後、取得SerialEMナビゲーターに追加されました。
この手順( 図2に要約)は、1営業日に、72時間(3日間)の顕微鏡セッションのための171ターゲットの自動断層取得を可能にした。

図1: 代表仮想地図と中央化後の対応する集録を用いた正方形マップの例. (A) Turonovaら20.で使用される Sars-Cov-2 cryoEM グリッドの代表的正方形マップ。関心のある4つの領域は赤い十字でマークされています。顕微鏡の倍率は2,250倍である。(B) 選択したターゲット (赤い十字)(C)仮想ビュー マップの仮想ビュー (オレンジ) マップと仮想プレビュー (黄色) マップの生成に使用された領域をハイライト表示する、正方形のマップからトリミングします。(D) 仮想プレビュー マップ。(E) 仮想ビュー マップを参照として中心にした後の実際のビュー取得。顕微鏡の倍率は11,500倍である。(F)0° チルトシリーズから、仮想プレビューマップを基準として中心にした後の傾斜集録。顕微鏡の倍率は64,000xである。この図の大きなバージョンを表示するには、ここをクリックしてください。

{kind=link}
{kind=link}
ディスカッション
ニッチな技術から、cryoETは今では、前例のない到達可能な解像度21、22で細胞および分子レベルで構造研究を行うために広範な方法に成熟している。cryoEMイメージングに対する需要が増え続けており、この技術にアクセスできる限られたリソースに負担をかけている。多数の国のクライオエム施設が開設され、世界中のコミュニティのニーズをサポートするTEM能力を高める科学機関の努力にもかかわらず、cryoEM機器へのアクセスは依然として限られており、データ収集に利用可能な時間は、各顕微鏡セッションの収量を最大化するためにユーザーが効率的に使用する必要があります。データの品質を損なうことなく、より良いスループットを達成するために、新しい画像取得ルーチンのために呼び出されたデータ収集に利用可能な限られた時間と組み合わせた数百のチルトシリーズを取得する必要性。ハードウェアおよびイメージングワークフローの最近の発展は、チルトシリーズ取得の速度を大幅に増加させ、18,19で、取得ポイントの設定にかかる時間と実際のチルトシリーズ取得に必要な時間の比が劇的に変化しています。全体として、取得ポイントを設定する手順は、cryoETセッションの達成可能なスループットの主要なボトルネックの1つになりつつあります。
ここで紹介する最適化されたプロトコルにより、cryoETセッションの初日に自動断層線取得のための171の位置を設定することができ、顕微鏡は他の操作(例えば、正方形マッピング、チューニング、自動チルトシリーズ取得)に積極的に従事していました。このパイプラインは、cryoET セッションのスループットを最大化するだけでなく、自動データ収集セッションの準備段階でユーザーが投資する時間を大幅に削減します。説明されたプロトコルでは、ユーザーは、適切な関心領域を識別し、取得ポイントとしてシリアルEMナビゲータにそれらを追加するために、マップされたグリッドの正方形を参照するように求められます。すべてのターゲットは、仮想マップ16の生産のための PyEM ツールによって SerialEM 内でバッチ処理されます。したがって、提示された計算アプローチは、ステージの動き、画像取得、ビューとプレビューの間のイメージング条件の変化に関連する待ち時間を排除し、高倍率を中心にしてこれらのステップを最終的に繰り返すことによって、実際のアンカーマップを取得するよりもかなり速くなります。さらに、各取得画像が対象物23に電子線量の蓄積をもたらすので、標的の正確な再調整のための仮想マップの使用は、実際のチルトシリーズ取得前にcryoETセッションの準備段階で導入された放射線損傷を減少させる。ここで説明するプロトコルは、チルトシリーズの取得前にターゲットの再調整のために中間および高倍率仮想マップ(それぞれプレビューとビュー)の両方を使用しています。この手順は、位置合わせ精度の重要性が低い場合にのみ中間倍率ビュー画像を使用するように簡単に変更することができますが、例えば、最終的なターゲット精度がそれほど重要でない大きな構造の場合は10、または各取得ポイント24のユーザーの手動選択を必要とするクライオグリッド上で不十分な単一粒子分析サンプルの場合、 25.最後に、ダミーのSerialEMインスタンスのオフライン使用に基づくアプローチは、顕微鏡でのユーザーの物理的な存在の必要性を最小限に抑えることによって、リモート接続を介して取得ポイントのセットアップを容易にし、施設の運用上の組織の面でより柔軟性を可能にします。
最近のcryoETの技術と方法の進歩により、自動データ収集セッションの速度と信頼性が大幅に向上しました。しかし、この方法の残りのレート制限ステップに対処するために、さらなる開発が必要です。最も顕著なのは、グリッドと正方形マッピングの初期段階がセッション設定の主要なボトルネックの1つになりつつあり、顕微鏡ステージの動きの速度を上げ、直接電子検出器による画像取得の速度を高めることを目的としたハードウェアの改善の必要性を生み出しています。さらに、ターゲット識別のプロセスを完全に自動化するための機械学習アプローチの開発は、関心のある地域を選択するためのユーザーの目視検査の必要性を排除するために重要です, ユーザーの専門知識に依存する時間のかかる手順.
開示事項
著者らは利益相反を宣言しない。
謝辞
我々は、ドイツ・ハイデルベルクにある欧州分子生物学研究所の構造・計算生物学ユニット及び電子顕微鏡コア施設及びiNEXT-Discovery(プロジェクト番号871037)からの支援を認める。SerialEM ソフトウェア パッケージの著者である David Mastronarde 教授の優れたサポートに非常に感謝しています。また、原稿の批判的な読書のためにハーマンフンに感謝します。
資料
| Name | Company | Catalog Number | Comments |
| Transmission Electron Microscope | Our protocol is only based on computational workflows. The user will only need acess to a TEM of any kind |
参考文献
- Adrian, M., Dubochet, J., Lepault, J., McDowall, A. W. Cryo-electron microscopy of viruses. Nature. 308 (5954), 32-36 (1984).
- Cheng, Y. Single-particle cryo-EM-How did it get here and where will it go. Science. 361 (6405), 876-880 (2018).
- Lucic, V., Forster, F., Baumeister, W. Structural studies by electron tomography: From Cells to Molecules. Annual Review of Biochemistry. 74 (1), 833-865 (2005).
- Pfeffer, S., Mahamid, J. Unravelling molecular complexity in structural cell biology. Current Opinion in Structural Biology. 52, 111-118 (2018).
- Schur, F. K. M. Toward high-resolution in situ structural biology with cryo-electron tomography and subtomogram averaging. Current Opinion in Structural Biology. 58, 1-9 (2019).
- Bohning, J., Bharat, T. A. M. Towards high-throughput in situ structural biology using electron cryotomography. Progress in Biophysics and Molecular Biology. , (2020).
- Briggs, J. A. Structural biology in situ--the potential of subtomogram averaging. Current Opinion in Structural Biology. 23 (2), 261-267 (2013).
- Wan, W., Briggs, J. A. G. . Methods in Enzymology. 579, 329-367 (2016).
- Tan, Y. Z., Cheng, A., Potter, C. S., Carragher, B. Automated data collection in single particle electron microscopy. Microscopy. 65 (1), 43-56 (2016).
- Morado, D. R., Hu, B., Liu, J. Using Tomoauto: A protocol for high-throughput automated cryo-electron tomography. Journal of Visualized Experiments: JoVE. (107), e53608 (2016).
- Resch, G. P. . Methods in Cell Biology. 152, 135-178 (2019).
- Bharat, T. A., Kukulski, W. . Correlative Imaging: Focusing on the Future. , 137-153 (2019).
- Hagen, W. J. H., Wan, W., Briggs, J. A. G. Implementation of a cryo-electron tomography tilt-scheme optimized for high resolution subtomogram averaging. Journal of Structural Biology. 197 (2), 191-198 (2017).
- O'Toole, E., vander Heide, P., McIntosh, R. J., Mastronarde, D. . Cellular Imaging: Electron Tomography and Related Techniques. , 95-116 (2018).
- Mastronarde, D. N. Automated electron microscope tomography using robust prediction of specimen movements. Journal of Structural Biology. 152 (1), 36-51 (2005).
- Schorb, M., Haberbosch, I., Hagen, W. J. H., Schwab, Y., Mastronarde, D. N. Software tools for automated transmission electron microscopy. Nature Methods. 16, 471-477 (2019).
- Turonova, B., et al. Benchmarking tomographic acquisition schemes for high-resolution structural biology. Nature Communications. 11 (1), 876 (2020).
- Chreifi, G., Chen, S., Metskas, L. A., Kaplan, M., Jensen, G. J. Rapid tilt-series acquisition for electron cryotomography. Journal of Structural Biology. 205 (2), 163-169 (2019).
- Eisenstein, F., Danev, R., Pilhofer, M. Improved applicability and robustness of fast cryo-electron tomography data acquisition. Journal of Structural Biology. 208 (2), 107-114 (2019).
- Turonova, B., et al. In situ structural analysis of SARS-CoV-2 spike reveals flexibility mediated by three hinges. Science. 370 (6513), 203-208 (2020).
- O'Reilly, F. J., et al. In-cell architecture of an actively transcribing-translating expressome. Science. 369 (6503), 554-557 (2020).
- Tegunov, D., Xue, L., Dienemann, C., Cramer, P., Mahamid, J. Multi-particle cryo-EM refinement with M visualizes ribosome-antibiotic complex at 3.7 Å inside cells. Nature Methods. 18, 186-193 (2020).
- Karuppasamy, M., Karimi Nejadasl, F., Vulovic, M., Koster, A. J., Ravelli, R. B. G. Radiation damage in single-particle cryo-electron microscopy: effects of dose and dose rate. Journal of Synchrotron Radiation. 18 (3), 398-412 (2011).
- Liberta, F., et al. Cryo-EM fibril structures from systemic AA amyloidosis reveal the species complementarity of pathological amyloids. Nature Communications. 10 (1), 1104 (2019).
- Radamaker, L., et al. Cryo-EM structure of a light chain-derived amyloid fibril from a patient with systemic AL amyloidosis. Nature Communications. 10 (1), 1103 (2019).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved