Methods Article
극저온 전자 단층 촬영 데이터 수집 최적화를 위한 전략
요약
극저온 전자 단층 촬영에서 대규모 데이터 수집에 대한 수요가 증가함에 따라 처리량이 높은 이미지 수집 루틴이 필요합니다. 여기에 설명된 프로토콜은 지형 데이터 수집의 시간 효율성과 처리량을 최대화하기 위한 고급 인수 전략의 최근 개발을 구현하는 프로토콜입니다.
초록
극저온 전자 단층 촬영(cryoET)은 네이티브에 가까운 상태에서 생물학적 샘플의 3D 구조를 연구하는 강력한 방법입니다. 현재 최첨단 극저온ET와 서브토모그램 평균 분석이 결합되어 지형 재구성 내여러 사본에 존재하는 거대 분자 복합체의 고해상도 구조적 측정이 가능합니다. 토모그래피 실험은 일반적으로 중요한 운영 실행 비용을 가진 고급 전송 전자 현미경을 통해 취득할 수 있는 다량의 틸트 시리즈를 요구합니다. 자동화된 데이터 수집 루틴의 처리량과 신뢰성은 최근 몇 년 동안 지속적으로 개선되었지만, 틸트 시리즈를 획득할 관심 영역을 선택하는 프로세스는 쉽게 자동화할 수 없으며 여전히 사용자의 수동 입력에 의존합니다. 따라서 대규모 데이터 수집 세션의 설정은 틸트 시리즈 획득에 사용할 수 있는 남은 현미경 시간을 상당히 줄일 수 있는 시간이 많이 소요되는 절차이다. 여기서 이 프로토콜은 시리얼EM 패키지와 그리드 스크리닝 및 대규모 틸트 시리즈 데이터 수집의 시간 효율성을 크게 향상시키는 PyEM 소프트웨어를 기반으로 최근에 개발된 구현에 대해 설명합니다. 제시된 프로토콜은 시리얼EM 스크립팅 기능을 사용하여 그리드 매핑, 그리드 사각형 매핑 및 틸트 시리즈 수집을 완전히 자동화하는 방법을 보여 줍니다. 또한 이 프로토콜에서는 자동화된 데이터 수집이 시작된 후 PyEM을 사용하여 오프라인 모드에서 추가 획득 대상을 선택하는 방법을 설명합니다. 이 프로토콜을 설명하기 위해 Sars-Cov-2 tilt 시리즈의 고급 데이터 수집 컨텍스트에서 해당 응용 프로그램이 설명되어 있습니다. 제시된 파이프라인은 획득 대상을 신중하게 선택할 필요가 있는 단층 촬영 실험의 시간 효율성을 극대화하고 동시에 대량의 틸트 시리즈를 수집하는 데 특히 적합합니다.
서문
극저온 전자 현미경(cryoEM) 방법은 빠른 유리화 후 전염 전자 현미경(TEM)을 통해 생물학적 시료의 이미징을 기반으로 하며, 종업및 수화 상태에서 시편의 분자 및 세포 구조를 보존하는 샘플 준비 과정1,2. 극저온 전자 단층 촬영(cryoET)에서 상체시의 3D 모델은 상이한 방향, 소위 틸트 계열, 토모그래피3의전산 재구성에 이어 동일한 영역의 다수의 이미지를 획득함으로써 달성된다. 이러한 고급 이미징 기술은 본국 세포 환경4,5,6의맥락에서 생물학적 과정의 구조적 조사를 위한 강력한 방법으로 성숙하였다.
생체화 시료의 초구조적 분석 외에도, 지형 부피 내의 여러 부에 존재하는 거대 분자 복합체의 고해상도 재구성은 평균5의서브토모그램을 적용하여 얻을 수 있다. 이러한 재구성 접근법은 관심 구조를 포함하는 하위 볼륨의 반복적 정렬 및 평균을 기반으로 하며 신호 대 잡음 비율 및 최종 재건7,8의해상도를 높이는 것을 목표로 한다. Subtomogram 평균은 번거로운 운영 실행 비용으로 고급 TEM을 통해 수백 개의 틸트 계열의 인수를 요구하는 많은 양의 데이터의 수집 및 처리에 의존합니다.
현재 이러한 자동화 된 cryoET 세션의 설정은 일반적으로 사용자의 수동 입력9,10,11에의존하는 시간이 많이 소요되는 프로세스입니다. 일반적으로 대상은 매핑된 그리드의 육안 검사로 식별되며, 이후에자동화된 데이터 수집을 위해 설정됩니다. 획득 지점을 식별하는 사용자의 효율성은 종종 샘플의 특성에 의해 영향을 받는 경우가 많으며, 최적 농도로 정제된 거대 분자를 분석하거나 혼잡한 세포 환경 내에서 드문 사건의 경우 코르상대적접근법(12)의사용을 암시하는 경우 특히 도전적이다. 또한, 현재 워크플로우는자동화된 획득11,13,14동안 대상의 정확한 현지화 및 중심에 나중에 사용될 다양한 배율에서 설정 하는 동안 이미지를 수집해야 한다. 이러한 고정밀 재정렬 단계는 고해상도 애플리케이션에 매우 중요하며, 이는 이미징이 높은 배율에서 수행되어야 하며, 결과적인 작은 시야 내에서 관심 영역을 유지하기 위한 정확한 센터링 단계가 필요합니다. TEM이 틸트 시리즈 수집에 관여하지 않는 이 시간 소모적인 절차에 대해 각 데이터 수집 세션의 몇 시간이 모두 커밋됩니다. 따라서 필요한 기울기 계열의 양에 따라, 획득 지점의 식별 및 설정은 극저온 세션 동안 데이터 수집에 사용할 수 있는 현미경 시간에 상당한 영향을 미칠 수 있다.
여기에 설명된 것은 시리얼EM 소프트웨어패키지(15)와 최신 버전인 PyEM소프트웨어(16)를 기반으로 그리드 를 매핑하고, 그리드 사각형을 매핑하고, 대상을 선택하고, 대규모 틸트 시리즈 수집을 위한 자동화된 데이터 수집을 설정하는 데 에 대한 최적화된 프로토콜입니다. 이 방법의 핵심 개념은 대상의 정확한 현지화 및 중심을 위해 가상 맵이라고 불리는 각 획득 항목에 대해 PyEM에서 계산적으로 생성된 이미지를 시리얼EM에 제공하는 것입니다. 실제 획득 시간을 얻으려면 대상 선택과 가상 맵 생성은 SerialEM의 두 번째 더미 인스턴스를 사용하여 오프라인으로 수행되어 TEM 운영에서 획득 대상의 선택 프로세스를 분리합니다. 데이터 품질13,17 또는 틸트 시리즈 획득속도(18,19)를높이는 방법을 다루지는 않지만, 이 프로토콜은 주로 대규모 자동 cryoET 세션 설정의 시간 효율성을 최적화하기 위한 전략에 초점을 맞추고 있습니다. 따라서, 제시된 프로토콜의 구현은 틸트 시리즈 수집에 사용할 수 있는 현미경 시간을 증가시킴으로써 자동화된 데이터 수집의 수율을 극대화하고자 하는 cryoET 데이터 수집 워크플로우를 확립하는 과학자들을 위한 것입니다.
프로토콜
여기에 설명된 프로토콜은 EMBL CryoEM 서비스 플랫폼에서 생성된 보다 포괄적인 문서의 일부로, 샘플 로딩, 그리드 매핑, 현미경 튜닝, 획득 지점 설정 및 자동화된 데이터 수집을 포함하여 일반적인 극저온 세션의 전체 절차를 보여주는 철저한 단계별 지침 및 스크린샷을 포함하고 있습니다. 전체 프로토콜은 다음 링크에서 다운로드할 수 있습니다: https://oc.embl.de/index.php/s/9OuTl8AazDkCNq0/download
1. 전제 조건
- SerialEM 버전 3.8을 설치하고 현미경 및 검출기(http://bio3d.colorado.edu/SerialEM/betaHlp/html/setting_up_serialem.htm)를 제어하도록 설정합니다.
- 직렬 EMversion 3.8(https://sphinx-emdocs.readthedocs.io/en/latest/serialEM-note-setup-dummy.html)의 더미 인스턴스를 설치합니다.
- PyEM(https://git.embl.de/schorb/pyem)을 설치합니다.
2. 그리드 매핑
- 그리드가 있는 카세트를 현미경 자동 로더에 로드합니다.
- 전체 그리드 매핑에 적합한 이미징 조건을 설정합니다. 사용되는 검출기(EFTEM SA 2250x)의 시야를 고려하여 가능한 가장 낮은 배율로 이 작업을 수행합니다. 이미징 상태를 시리얼EM 이미징 상태로 저장하여 나중에 사용하기에 편리합니다.
- 전체 몽타주 설정
- 직렬EM 네비게이터 메뉴를 엽니다.
- 몽타주 및 그리드를 선택합니다.
- 전체 몽타주 설정선택 .
- 스크립트 Grid_Mapping시작하십시오. 스크립트가 오토로더가 냉각될 때까지 기다립니다. 인벤토리를 한 다음 인벤토리 프로시저가 찾은 각 그리드를 매핑합니다. 기울기 시리즈 메뉴를 통해 전자 메일을 입력하여 스크립트가 완료되면 편리하게 이메일을 보낼 수 있도록 합니다.
- 네비게이터를 저장합니다.
- SerialEM 네비게이터의 모든 그리드 맵을 검사하고 더 높은 배율에서 더 매핑할 그리드를 선택합니다.
참고: 오토로더 시스템을 갖춘 많은 TEM은 다시 로드할 때 그리드회전을 표시합니다. 다시 로드한 후 그리드를 다시 매핑하는 것이 가장 좋습니다. 대체 시스템은 일반적으로 일부 교대근무만 겪으며, 이는 마커로의 전환 절차로 직렬EM에서 수정할 수 있습니다.
3. 시리얼EM 저용량 설정
- SerialEM 저용량 보기 및 미리 보기 모드의 배율을 설정합니다(6단계에서는 필요합니다).
- 뷰 이미지를 획득하고 네비게이터의 맵으로 저장합니다.
- 미리 보기 이미지를 획득하고 네비게이터의 맵으로 저장합니다.
- 두 모드를 동일한 비닝으로 설정합니다(비닝 4가 제안됩니다). 이렇게 하면 두 맵을 하나의 이미지 스택에 저장할 수 있습니다.
- SerialEM 네비게이터 창에서 보기 맵의 레이블을 보기로 변경하고 미리 보기 맵의 레이블을 미리 보기로 변경합니다.
- 네비게이터 파일을 저장하고 닫습니다.
참고: 초기 보기 및 미리 보기 이미지에 대한 대상이 필요하지 않으며 PyEM은 이미징 설정을 사용합니다.
4. 그리드 사각형 매핑
- 이미징 조건을 설정하여 그리드 사각형을 매핑합니다. 관심 있는 샘플과 수심 비드 분포를 볼 수 있는 것이 매우 중요합니다. 그리드 사각형 맵에 대한 최적의 대비를 보장하려면 다음 단계를 수행합니다.
- 객관적인 조리개를 삽입합니다.
- 해당하는 경우 에너지 필터 슬릿을 삽입합니다.
- -100 μm의 디포커스를 사용합니다.
- 추가 매핑에 적합한 좋은 그리드 사각형을 위한 화면입니다. 그리드 맵에서 사각형을 육안으로 검사한 후 그리드 제곱 맵에 사용할 이미징 조건으로 사각형의 테스트 이미지를 촬영합니다.
- 좋은 사각형이 식별되면 SerialEM 네비게이터의 포인트 추가 기능을 사용하여 그리드 맵 이미지에 중심을 표시합니다.
- 모든 포인트가 추가되면, 첫 번째 지점에서 직렬EM 네비게이터 프레스 시프트 + A에서 마지막 지점에서 Shift + A를 누릅니다.
참고: 이제 추가된 모든 포인트는 A로 표시되므로 모든 획득 포인트가 됩니다. - 첫 번째 지점에서 Shift + N(항목시 새 파일 만들기)을 누른 다음 마지막 지점에서 다시 누릅니다. 다가오는 대화 상자에서 몽타주 이미지를 선택합니다.
- 몽타주 대화 상자가 팝업되면 하나의 그리드 사각형을 덮는 몽타주 크기를 설정합니다. 이는 사용되는 그리드의 배율과 메시 크기에 따라 다르며 일반적으로 2 x 2 ~ 4 x 4 몽타주가 필요합니다. 시리얼EM이 그리드 사각형당 모든 파일을 편리하게 자동 번호로 지정할 수 있도록 숫자(예: squaremap_01.mrc)가 있는 이름을 지정합니다.
- 직렬EM 네비게이터 메뉴를 열어 그리드 매핑을 시작하고 항목에서 획득을 클릭합니다.
- 팝업 메뉴에서 다음 옵션을 선택합니다.
- 거친 연심을 선택합니다.
- 맵 이미지 획득을 선택합니다.
- 끝에서 열 밸브 닫기를 선택합니다.
- 끝에서 이메일 보내기를 선택합니다.
5. 대상 선택
- 더미 직렬 EM 인스턴스를 엽니다. 이는 두 컴퓨터가 네트워크 연결을 공유하는 경우 현미경을 제어하는 SerialEM PC 또는 다른 (지원) PC에서 설정할 수 있습니다.
- 첫 번째 그리드 사각형이 매핑되면 직렬EM 네비게이터 메뉴 옵션 병합을 사용하여 더미 시리얼EM 인스턴스에서 몽타주를 볼 수 있습니다.
- 네비게이터 창을 두 번 클릭하여 그리드 사각형 맵을 엽니다.
- 맵을 검색하고 더미 직렬EM 네비게이터 옵션을 사용하여 포인트 추가를 사용하여 관심 대상에 이미지 획득 지점을 추가합니다.
- 완료되면 새 사각형을 매핑한 후 Navigator 파일을 저장하고 Navigator를 다시 병합합니다. 모든 그리드 사각형이 매핑될 때까지 계속합니다.
6. 가상 맵 생성
- 다시 한번 네비게이터 파일을 더미 직렬EM 인스턴스와 병합합니다.
- 더미 직렬EM 메뉴, 도구에서 PyEM 가상지도 스크립트를 실행하고 가상 앵커지도를선택합니다. 그리드 정사각형 맵의 크기와 양과 보기 및 미리 보기 맵의 비닝에 따라 다소 시간이 걸릴 수 있습니다.
참고: PyEM은 완료되면 자동으로 닫히는 명령 창을 시작한 다음 새 네비게이터 파일을 열 수 있습니다. 선택한 점이 포함된 몽타주 맵당 PyEM은 병합된 단일 맵과 모든 보기 및 미리 보기 맵을 씁니다. 마지막으로, 그것은 <네비게이터 파일 이름>_automaps.nav라는새로운 네비게이터 파일을 씁니다.
7. 현미경 튜닝
- 현미경 튜닝을 확인합니다. 적절한 현미경 성능을 보장하려면 데이터 수집에 대해 동일한 배율 및 빔 크기 설정을 다음 순서로 사용합니다.
- CTF (젬린 tableau)에 의해 세리아렘 코마 프리 정렬을 실행합니다.
- 목표 조리개를 삽입하고 중앙에 삽입합니다.
- CTF (자동 낙인)에 의해 직렬EM 올바른 난시를 실행합니다.
- GIF 빠른 조정(즉, 슬릿 포커스만)을 실행합니다.
참고: 7.1.1, 7.1.3 및 7.1.4 단계는 더 많은 용량 속도를 요구할 수 있기 때문에 현물 크기만 변경해야 합니다. 빔 기울기를 유발하므로 빔 크기를 변경하여 튜닝이 잘못되어서는 안 됩니다. 단계 7.1.1, 7.1.2 및 7.1.3은 공개적으로 사용할 수 있는 스크립트(https://serialemscripts.nexperion.net/script/47)에서 반자동입니다.
8. 네비게이터 설정
- SerialEM에서 <네비게이터 파일 이름 >_automaps.nav라는 새 네비게이터 파일을 엽니다.
참고: V_yyyy 보기 맵이며 P_yyyy 미리 보기 맵입니다. 미리 보기 맵은 획득 지점으로 설정됩니다. - SerialEM 네비게이터 창에서 모든 A 점 선택 해제, 첫 번째 V_yyyy 맵을 선택하고, 붕괴를선택하고, A를 두 번 클릭하고, 축소를 선택 해제합니다.
- 첫 번째 V_yyyy 위치를 선택하고 Shift + T V_yyyy를 누릅니다.
- 대화 상자를 열려면 파일 속성에서 단일 프레임 이미지를 선택합니다.
- 다음 파일 속성 대화 상자에서 이미징 요구 사항 및 계측기 설정에 따라 원하는 매개 변수를 선택합니다.
- 메시지가 표시되면 숫자(예: TS_001.mrc)가 있는 이름을 지정하고 저장을 클릭합니다.
참고: SerialEM은 모든 기울기 시리즈의 파일 이름을 자동으로 번호지정합니다. - 첫 번째 TS 위치에 대한 틸트 시리즈 컨트롤러를 설정합니다. 완료되면 확인을 클릭하여 이 획득 항목 후 모든 TILT 계열에 대한 매개 변수를 설정합니다. 이제 모든 미리 보기 맵이 번호로 번호가 매겨진 파일 이름 TS_xxx.mrc인 TS(틸트 시리즈)로 선택됩니다.
참고: 나중에 Navigator TSparams 기능을 사용하여 매개 변수를 수동으로 변경할 수 있습니다. 목록의 모든 항목에 대한 변경 사항이 적용됩니다. 사용자에게는 기울기 시리즈 대신 사용자 지정 스크립트를 실행할 수 있습니다.
9. 포커스/트랙 위치 설정
- 필요한 경우 각 대상에 대한 초점/트랙 거리를 설정합니다(시리얼EM 저용량이 켜져 있는지 확인합니다).
- 뷰 맵을 두 번 클릭하여 로드합니다.
- 네비게이터 목록에서 미리 보기 맵을 선택합니다.
- 네비게이터 창에서 포커스 편집을 선택합니다.
- 저용량 제어판에서 영역 간 축 회전을 선택 해제하여 스테이지 기울기 축을 따라 평가판을 배치하고 포커스를 배치합니다.
- 로드된 뷰 맵에서 원하는 영역을 클릭하여 이 기울기 시리즈의 포커스/평가판 위치를 설정합니다.
- 네비게이터 항목에 TSP가 지금 설정되어 있는지 확인합니다. 모든 항목에 대한 절차를 반복합니다.
참고: 포커스/트랙 위치는 Navigator에서 자동으로 아래쪽으로 복사됩니다. 따라서 이전 항목의 포커스/트랙 위치가 올바른 측면과 올바른 거리에 있는 경우 현재 항목에 대해 변경할 필요가 없습니다.
10. 추가 스크립트 설정
- 두 스크립트는 초점 범위를 처리: 프리토모와 동안 . 프리토모 스크립트는 각 기울기 시리즈와 각 기울기 동안 의 런토모 스크립트 전에 실행됩니다.
- 스크립트 프리토모에서초점 범위를 편집할 수 있습니다.
- SerialEM 기울기 시리즈 메뉴에서 TS에서 스크립트 실행을 확인하고 도중 스크립트의 스크립트 번호를 선택합니다.
11. 실행
- 질소 탱크 수준을 확인합니다.
- 오토로더 터보 오프가 선택되었는지 확인합니다.
- 데이터 저장 여유 공간을 확인합니다.
- SerialEM 파일 메뉴에서 로그 파일에 대한 연속 저장을 선택 해제하고 현재 열려 있는 로그 파일을 닫습니다. 각 틸트 계열은 자체 로그 파일을 가져옵니다.
- 네비게이터 메뉴에서 항목에서 획득을 클릭합니다.
- 스크립트 PreTomo를 실행합니다.
- 기본 작업 획득 기울기 시리즈를 선택합니다.
- PostTomo 후 실행 스크립트를 선택합니다.
- 끝에 닫기 열 밸브를 선택합니다.
- 끝에 이메일 보내기를선택합니다.
- GO를 클릭합니다.
참고: SerialEM은 성공 또는 오류중 틸트 시리즈당 전자 메일을 보냅니다. 그러나 오류는 전체 기울기 범위에 도달하지 못했다는 것을 의미할 수도 있습니다.
결과
이 절차는 Turonova 외. 202020에기술된 Sars-Cov-2 틸트 시리즈를 획득하는 데 사용되었습니다. 전체 데이터 세트는 EMBL 하이델베르크에서 3개의 현미경 세션을 통해 3개의 별개의 그리드를 사용하여 생성되었습니다. 현재 연구는 첫 번째 그리드에서 실행되는 첫 3일(~72시간) 세션에 초점을 맞추고 설명합니다.
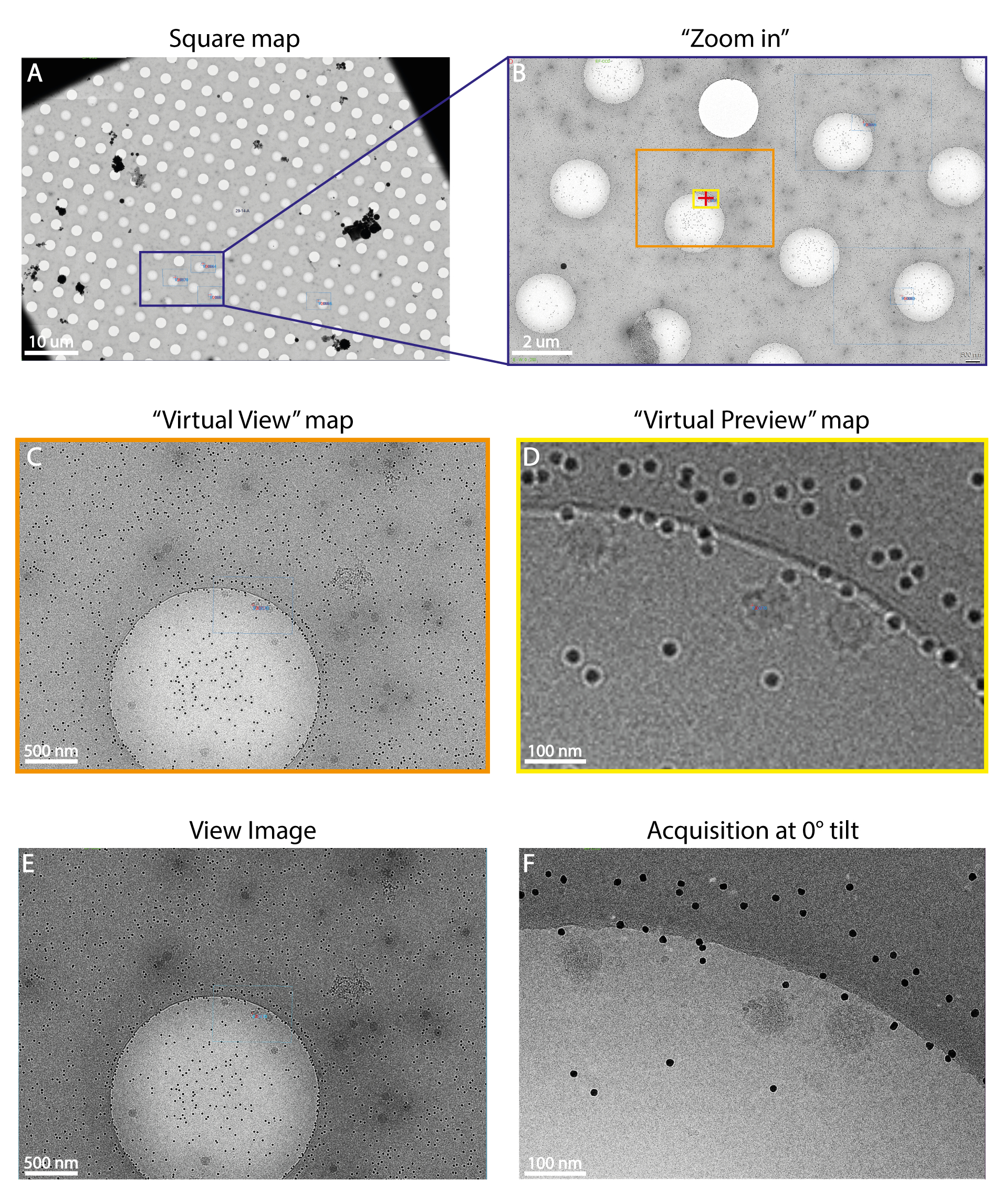
전체 그리드가 낮은 배율(~10분, 2단계 참조)으로 매핑된 후, 71개의 적합한 사각형이 그리드 맵에 선택되었고, 중간 배율맵(제곱 맵)은관심 있는 시료의 직접 시각화 및 식별을 허용하는 설정(배율, 노출, 디포커스)으로 획득하였다(단계 4참조)(그림 1A). 획득 시간은 평방 당 ~ 3 분, 총 3 시간 45 분이었습니다.
첫 번째 제곱맵이 생성되자마자, 더미 직렬EM 인스턴스(카메라 또는 현미경에 대한 제어 없이)가 별도의 컴퓨터에서 열리고 각지맵을 시각화하고 틸트 시리즈 획득에 적합한 대상에 포인트를 추가합니다(그림1B참조). 새로 획득한 사각형 맵은 현재 더미 직렬EM 네비게이터와 획득한 SerialEM 인스턴스에서 네비게이터와 병합하여 검색되었습니다. ~2h의 그리드 스퀘어 획득 및 선택 후 50개의 초기 대상을 식별할 수 있습니다.
스퀘어 맵 수집이 완료된 후 SerialEM 저용량이 설정되고 참조 보기 및 미리 보기 이미지를 맵으로 가져와 저장했습니다(3단계 참조). 후자는 더미 직렬EM 인스턴스에서 즉시 사용하여 해당 정사각형 맵 이미지, 가상 보기(그림 1C)및 가상 미리보기(그림 1D)파이엠 소프트웨어 제품군을 사용하여 선택한 50개의 대상의 맵에서 생성할 수 있으며, ~30분(6단계 참조). 더미 시리얼EM 세션에서이 처리 시간은 수집을위한 현미경의 최종 준비를 수행하는 데 사용되었다 : 에너지 필터 튜닝, 새로운 카메라 게인 참조 이미지 수집, 난시및 객관적인 렌즈의 혼수 부 정렬.
현미경 튜닝이 완료되고 50개의 초기 대상에서 가상 맵이 생성되면 획득에 사용되는 실제 직렬EM 네비게이터가 설정되었습니다(8단계 참조), 포커스 및 트랙 위치(9단계 참조), 틸트 시리즈 수집이 시작될 수 있습니다(10단계 및 11단계 참조). 가상뷰 맵(도 1C)은가상 미리보기 맵(도1D)을사용하여 실제 틸트 시리즈 획득 배율(도1F)에서수행된 최종 센터링이대상(도 1E)의초기 중심에 사용되었다.
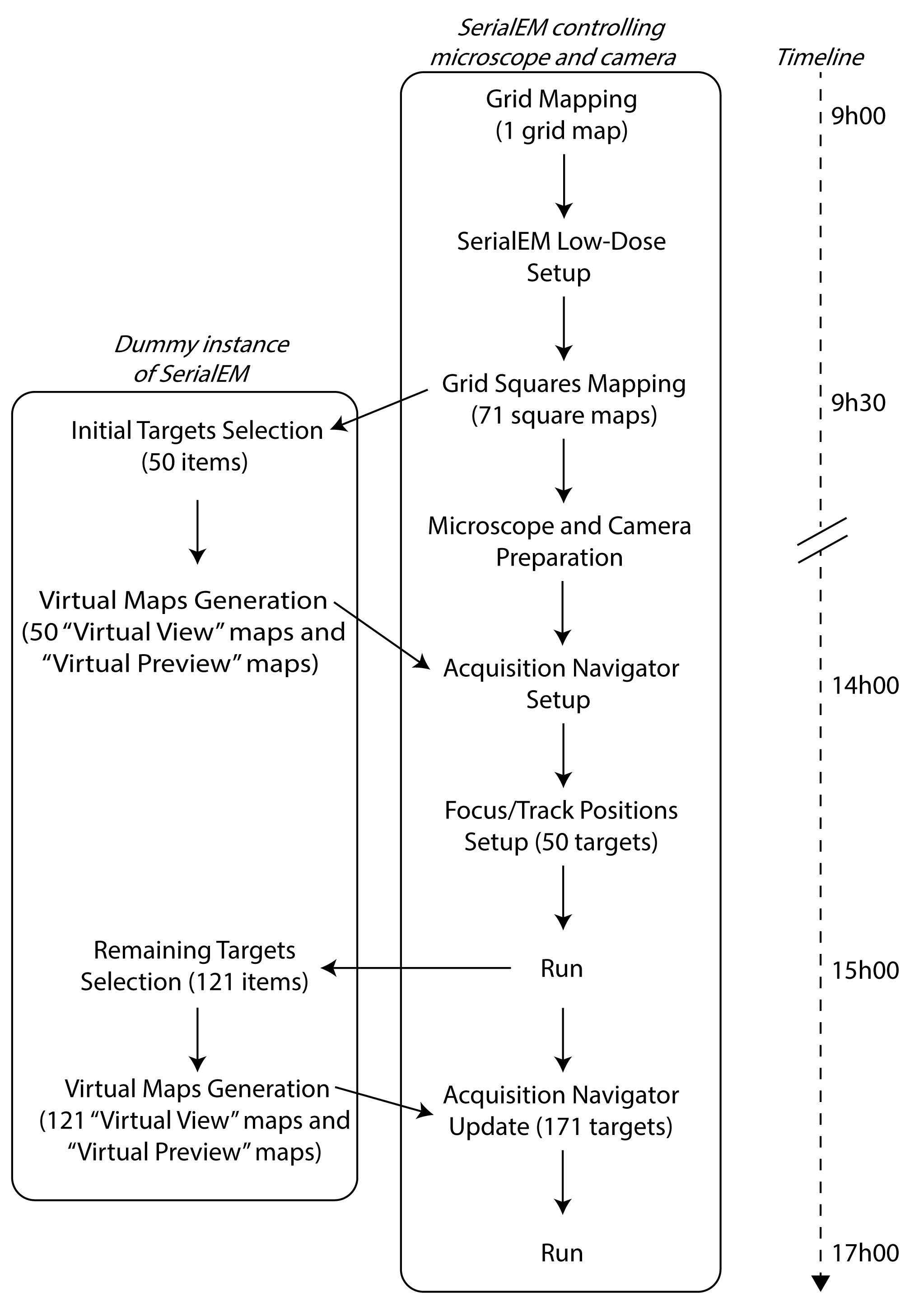
오전 9시 30분에 그리드 매핑을 시작으로 50개의 초기 목표에 대한 틸트 시리즈 의 인수는 약 15:00에시작되었습니다. 지형 획득에 사용되는 설정(세부 정보 참조 참조 참조)으로 기울기 시리즈는 획득하는 데 20분이 걸렸으며, 충분한 목표가 밤새 실행되었습니다. 인수가 진행되는 동안 나머지 정사각형 맵을 검사할 수 있으며 더미 시리얼EM 인스턴스를 통해 오프라인으로 추가된 더 많은 대상이 추가되었습니다. 나머지 제곱맵 중 121개의 대상을 더 선택하여 72h 세션이 완료될 때까지 실행될 수 있을 정도로 이러한 새 대상에 대한 가상 맵이 생성된 후 인수 직렬EM 네비게이터에 추가되었습니다.
이 절차(그림 2로요약)는 단일 근무일에 72h(3일) 현미경 세션에 대한 자동 토모그래피 수집을 위한 171개의 표적을 설정할 수 있도록 허용하였다.

그림 1: 대표적인 가상지도와 그 중도 후의 해당 획득을 가진 사각지도의 예. (A)Turonova 외20에서사용되는 사르스-코브-2 극저온 그리드의 대표 사각지도. 관심 있는 4개 지역은 적십자로 표시됩니다. 현미경 배율은 2,250배입니다. (B)선택한 대상(적도)(C) 가상뷰 맵에 대한 가상뷰(주황색) 및 가상 미리보기(노란색) 맵을 생성하는 데 사용된 영역을 강조하는 사각형 맵에서 자르기. (D)가상 미리보기 맵. (E) 가상 뷰 맵을 참조로 사용하여 중심을 이린 후 실제 뷰 획득. 현미경 배율은 11,500배입니다. (F) 가상 미리 보기 맵을 참조로 사용하여 중심으로 한 후 틸트 계열에서 0° 기울기 획득. 현미경 배율은 64,000배입니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.

{kind=link}
{kind=link}
토론
틈새 기술에서, cryoET는 지금 전례없는 도달 해상도와 세포 및 분자 수준에서 구조적 연구를 수행하는 광범위한 방법으로 성숙했다21,22. 극저온이미징에 대한 수요가 계속 증가함에 따라 이 기술에 액세스할 수 있는 제한된 리소스에 부담을 주고 있습니다. 다수의 국가 냉동 고엠 시설을 개설하고 전 세계 커뮤니티의 요구를 지원하기 위한 TEM 용량을 늘리기 위한 과학 기관의 노력에도 불구하고, 냉동EM 계측기에 대한 접근은 여전히 제한되어 있으며, 따라서 사용자가 각 현미경 세션의 수율을 극대화하기 위해 데이터 수집에 사용할 수 있는 시간을 효율적으로 사용해야 합니다. 데이터 품질을 손상시키지 않으면서 더 나은 처리량을 달성하기 위해 새로운 이미지 수집 루틴을 요구한 데이터 수집에 사용할 수 있는 제한된 시간과 결합된 수백 개의 틸트 시리즈를 획득해야 합니다. 최근 하드웨어 및 이미징 워크플로우의 개발로 기울기 시리즈 획득 속도가18,19로상당히 증가하여 실제 틸트 시리즈 획득에 필요한 획득 지점과 시간을 설정하는 데 소요되는 시간 간의 비율이 급격히 변화하게 되었습니다. 모두, 획득 지점을 설정하는 절차는 cryoET 세션의 달성 가능한 처리량에 대한 주요 병목 현상 중 하나가되고있다.
여기에 제시된 최적화된 프로토콜을 통해 우리는 냉동 온수 세션 첫날에 자동화된 지형 수집을 위한 171개의 위치를 오프라인 모드로 설정하고 현미경이 다른 작업(예: 제곱 매핑, 튜닝 및 자동 틸트 시리즈 수집)에 적극적으로 관여하여 데이터 수집에 사용할 수 있는 현미경 시간에 영향을 미치지 않도록 했습니다. 이 파이프라인은 극저온ET 세션의 처리량을 최대화하는 것 외에도 자동화된 데이터 수집 세션의 준비 단계에서 사용자가 투자한 시간을 크게 줄입니다. 설명된 프로토콜에서 사용자는 매핑된 그리드 사각형을 탐색하여 관심 있는 적절한 영역을 식별하고 해당 정보를 연속 EM 네비게이터에 인수 지점으로 추가하라는 메시지가 표시됩니다. 그런 다음 모든 대상은 가상 맵16의생산을 위한 PyEM 도구에 의해 SerialEM 내에서 일괄 처리됩니다. 따라서 제시된 계산 접근 방식은 스테이지 이동, 이미지 수집, 뷰와 미리 보기 사이의 이미징 조건 변경과 관련된 대기 기간을 제거하고 높은 배율의 중심에 있는 동안 이러한 단계의 최종 반복을 제거하여 실제 앵커링 맵을 획득하는 것보다 상당히 빠릅니다. 또한, 각 획득된 이미지가 관심대상(23)에전자 용량의 축적을 유도함에 따라, 대상의 정확한 재조정을 위한 가상 맵의 사용은 실제 틸트 시리즈 획득 전에 극저온ET 세션의 예비 단계에서 도입된 방사선 손상을 감소시킨다. 여기에 설명된 프로토콜은 틸트 시리즈 수집 전에 대상의 재조정을 위해 중간 및 고배율 가상 맵(각각 미리 보기 및 보기)을 모두 사용합니다. 이 절차는 정렬 정확도가 덜 중요할 때 중간 배율 보기를 사용하기 위해 쉽게 수정할 수 있으며, 예를 들어, 궁극적인 목표 정확도가 덜 우려되는 대형 구조물의 경우또는 각 획득점(24)의사용자의 수동 선택을 요구하는 극저온 그리드에 제대로 확산되지 않는 단일 입자 분석 샘플에대해, 25. 마지막으로 더미 시리얼EM 인스턴스의 오프라인 사용에 기반한 접근 방식은 현미경에서 사용자의 물리적 존재의 필요성을 최소화하여 원격 연결을 통해 획득 지점의 설정을 용이하게하여 시설의 운영 조직 측면에서 더 많은 유연성을 가능하게합니다.
cryoET에 대한 기술과 방법의 최근 발전은 자동화 된 데이터 수집 세션의 속도와 신뢰성을 크게 향상했습니다. 그러나 이 방법의 나머지 속도 제한 단계를 해결하기 위해서는 추가 개발이 필요합니다. 특히, 그리드 및 제곱 매핑의 초기 단계는 이제 세션 설정의 주요 병목 현상 중 하나가 되어 현미경 단계 의 움직임과 직접 전자 검출기에 의한 이미지 수집 속도를 높이기 위한 하드웨어 개선의 필요성을 생성하고 있습니다. 또한 대상 식별 프로세스를 완전히 자동화하기 위한 기계 학습 접근 방식의 개발은 사용자의 전문 지식에 의존하는 시간이 많이 소요되는 관심 지역 을 선택하는 사용자의 육안 검사가 필요하지 않습니다.
공개
저자는 이해 상충을 선언하지 않습니다.
감사의 말
우리는 구조 및 전산 생물학 단위와 독일 하이델베르크의 유럽 분자 생물학 연구소와 iNEXT-Discovery (프로젝트 번호 871037)의 전자 현미경 핵심 시설의 지원을 인정합니다. 우리는 시리얼EM 소프트웨어 패키지의 저자, 교수 데이비드 마스트로나데의 우수한 지원에 매우 감사드립니다. 우리는 또한 원고의 비판적 독서에 대한 허먼 펑에게 감사드립니다.
자료
| Name | Company | Catalog Number | Comments |
| Transmission Electron Microscope | Our protocol is only based on computational workflows. The user will only need acess to a TEM of any kind |
참고문헌
- Adrian, M., Dubochet, J., Lepault, J., McDowall, A. W. Cryo-electron microscopy of viruses. Nature. 308 (5954), 32-36 (1984).
- Cheng, Y. Single-particle cryo-EM-How did it get here and where will it go. Science. 361 (6405), 876-880 (2018).
- Lucic, V., Forster, F., Baumeister, W. Structural studies by electron tomography: From Cells to Molecules. Annual Review of Biochemistry. 74 (1), 833-865 (2005).
- Pfeffer, S., Mahamid, J. Unravelling molecular complexity in structural cell biology. Current Opinion in Structural Biology. 52, 111-118 (2018).
- Schur, F. K. M. Toward high-resolution in situ structural biology with cryo-electron tomography and subtomogram averaging. Current Opinion in Structural Biology. 58, 1-9 (2019).
- Bohning, J., Bharat, T. A. M. Towards high-throughput in situ structural biology using electron cryotomography. Progress in Biophysics and Molecular Biology. , (2020).
- Briggs, J. A. Structural biology in situ--the potential of subtomogram averaging. Current Opinion in Structural Biology. 23 (2), 261-267 (2013).
- Wan, W., Briggs, J. A. G. . Methods in Enzymology. 579, 329-367 (2016).
- Tan, Y. Z., Cheng, A., Potter, C. S., Carragher, B. Automated data collection in single particle electron microscopy. Microscopy. 65 (1), 43-56 (2016).
- Morado, D. R., Hu, B., Liu, J. Using Tomoauto: A protocol for high-throughput automated cryo-electron tomography. Journal of Visualized Experiments: JoVE. (107), e53608 (2016).
- Resch, G. P. . Methods in Cell Biology. 152, 135-178 (2019).
- Bharat, T. A., Kukulski, W. . Correlative Imaging: Focusing on the Future. , 137-153 (2019).
- Hagen, W. J. H., Wan, W., Briggs, J. A. G. Implementation of a cryo-electron tomography tilt-scheme optimized for high resolution subtomogram averaging. Journal of Structural Biology. 197 (2), 191-198 (2017).
- O'Toole, E., vander Heide, P., McIntosh, R. J., Mastronarde, D. . Cellular Imaging: Electron Tomography and Related Techniques. , 95-116 (2018).
- Mastronarde, D. N. Automated electron microscope tomography using robust prediction of specimen movements. Journal of Structural Biology. 152 (1), 36-51 (2005).
- Schorb, M., Haberbosch, I., Hagen, W. J. H., Schwab, Y., Mastronarde, D. N. Software tools for automated transmission electron microscopy. Nature Methods. 16, 471-477 (2019).
- Turonova, B., et al. Benchmarking tomographic acquisition schemes for high-resolution structural biology. Nature Communications. 11 (1), 876 (2020).
- Chreifi, G., Chen, S., Metskas, L. A., Kaplan, M., Jensen, G. J. Rapid tilt-series acquisition for electron cryotomography. Journal of Structural Biology. 205 (2), 163-169 (2019).
- Eisenstein, F., Danev, R., Pilhofer, M. Improved applicability and robustness of fast cryo-electron tomography data acquisition. Journal of Structural Biology. 208 (2), 107-114 (2019).
- Turonova, B., et al. In situ structural analysis of SARS-CoV-2 spike reveals flexibility mediated by three hinges. Science. 370 (6513), 203-208 (2020).
- O'Reilly, F. J., et al. In-cell architecture of an actively transcribing-translating expressome. Science. 369 (6503), 554-557 (2020).
- Tegunov, D., Xue, L., Dienemann, C., Cramer, P., Mahamid, J. Multi-particle cryo-EM refinement with M visualizes ribosome-antibiotic complex at 3.7 Å inside cells. Nature Methods. 18, 186-193 (2020).
- Karuppasamy, M., Karimi Nejadasl, F., Vulovic, M., Koster, A. J., Ravelli, R. B. G. Radiation damage in single-particle cryo-electron microscopy: effects of dose and dose rate. Journal of Synchrotron Radiation. 18 (3), 398-412 (2011).
- Liberta, F., et al. Cryo-EM fibril structures from systemic AA amyloidosis reveal the species complementarity of pathological amyloids. Nature Communications. 10 (1), 1104 (2019).
- Radamaker, L., et al. Cryo-EM structure of a light chain-derived amyloid fibril from a patient with systemic AL amyloidosis. Nature Communications. 10 (1), 1103 (2019).
재인쇄 및 허가
JoVE'article의 텍스트 или 그림을 다시 사용하시려면 허가 살펴보기
허가 살펴보기This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. 판권 소유