
マルチコプターエアロダイナミクス:ヘキサコプター上の推力の特徴付け
概要
ソース:プラシン・シャルマとエラ・M・アトキンス、ミシガン大学航空宇宙工学科、アン・アーバー、ミシガン州
マルチコプターは、さまざまな趣味や商用アプリケーションで人気が高まっています。それらはクワッドコプター(4つのスラスター)、ヘキサコプター(6つのスラスター)およびオクトコプター(8つのスラスター)構成として一般に利用できる。ここでは、マルチコプター性能を特徴付ける実験過程について述べた。推進ユニットの冗長性を提供するモジュラー小型ヘキサコプタープラットフォームがテストされます。個々の静的モーターの推力はダイナモメーターおよびさまざまなプロペラおよび入力コマンドを使用して決定される。この静的推力はモータRPMの関数として表され、そこでRPMはモータパワーと制御入力から決定されます。ヘキサコプターは5'x 7'低速再循環風洞のロードセルテストスタンドに取り付けられ、その空力挙動力およびドラッグ力の部品はさまざまなモーター信号、自由流れの流れの速度および攻撃の角度の飛行中に特徴付けられた。
この研究では、衣者1で報告されているように、運動(推進ユニット)故障に対する弾力性があるため、ヘキサコプターが選ばれました。推進システムの冗長性に加えて、安全な飛行、特に過密地域のミッションのために、高信頼性コンポーネントの選択も必要です。Ampatis2では、モーター、ブレード、バッテリー、電子スピードコントローラなどのマルチコプター部品の最適な選択について議論しています。同様の研究は、ミッション要件を満たすためにプロペラシステムの適切な選択に焦点を当てたBershadsky3でも報告されています。コンポーネントの冗長性と信頼性に加えて、飛行エンベロープの制限を確実にし、最も効率的な設計を選択するためには、車両の性能を理解することも不可欠です。
原則
マルチコプターは、単一のメインローターを持つ従来のヘリコプターと比較して、複数のローターを持つ空中車両です。従来のヘリコプターローターは可変ピッチを備えており、パイロットはリフトとステアリングを制御できます。対照的に、マルチコプターは固定ピッチローターに依存し、車両制御のためにモータ速度のバリエーションを使用します。
4つのローターを持つクワッドコプター、6つのローターを持つヘキサコプター、8つのローターを持つオクトコプターなど、さまざまなマルチコプター構成が出現しています。通常、マルチコプターは時計回り(CW)と反時計回り(CCW)固定ピッチプロペラの数が同じで、ローターの速度の変動により、飛行中に次の回転が3Dになります。
- ヨー – 垂直軸を中心に回転し、見出し角を変更する
- ロール – 車両の前方を指す軸を中心に回転し、左右の動きを引き起こす
- ピッチ – 左から右に走る軸を中心に回転し、前方および後方に傾く動きが生じる
ヘキサコプターを含むマルチコプターは、次の自由度に関して安定した飛行を維持するために制御することができます。
- ホバー - すべてのプロペラはほぼ同じ速度で動作するため、ほぼ同じ推力を生成します。すべてのプロペラは重心から均等に間隔をあけられるので、プロペラの推力は航空機に正味回転トルクを生じさせない。さらに、ヘキサコプターは3つの時計回り(CW)回転プロペラと3つの反時計回り(CCW)回転プロペラを使用して、プロペラのトルクが同じ速度で動作しているときにキャンセルされます。ホバーでは、合計上向きの推力は下向きの重力のバランスをとり、マルチコプターはゼロ風(ドラッグ)条件でゼロピッチとロール角度を維持します。
- ロールコントロール -ヘキサコプターは、片側のプロペラの速度を上げ、もう一方の側のプロペラの速度を下げることで、ロール軸を中心に制御できます。片側の推力増加が反対側の推力減少と同じである場合、正味推力は同じままである。同様に、トルクの正味効果は変わりません。
- ピッチコントロール - ヘキサコプターの場合、ピッチコントロールはロールコントロールに似ています。前部プロペラと後部プロペラの推力差は、ヘキサコプターをピッチに引き起こします。後部プロペラで推力が増加し、前方プロペラで減少した場合、ヘキサコプターは前方にピッチします。
- ヨーコントロール - ヨーコントロールは、反時計回りのプロペラ回転トルクと時計回りのプロペラ回転トルクのバランスをとることによって達成されます。反時計回りのプロペラを時計回りのプロペラよりも速く回転させることで(またはその逆の場合)、ヘキサコプターの反対の正味反応はヨーの回転を誘発する。
ヘキサコプター物理学のさらなる概要を以下に説明する。
モータパラメータ
バングラ4に次いで一括パラメータモデルを使用して、各モーター/プロペラスラスターユニットの推力とトルクを指定します。
 (1)
(1)
 (2)
(2)
ここで 発生する推力
発生する推力 は、モータトルクであり、
は、モータトルクであり、 推力係数であり、
推力係数であり、 モーメント係数であり、RPM(
モーメント係数であり、RPM( 毎分回転数)のモータ回転数である。モータの出力と効率は、次の方程式から計算できます。
毎分回転数)のモータ回転数である。モータの出力と効率は、次の方程式から計算できます。
 (3)
(3)
 (4)
(4)
 (5)
(5)
発電 される機械的電力
される機械的電力 は、電圧
は、電圧 と電流
と電流 での電力入力であり、
での電力入力であり、 モータ効率です。
モータ効率です。 ダイナモメーター実験から得られたデータを用いて実験的に決定される。
ダイナモメーター実験から得られたデータを用いて実験的に決定される。
ヘキサコプターダイナミクス
デュカード5とパワーズ6で説明されているように、ヘキサコプターのダイナミクスは、図1に示す参照フレームに基づいており、オロジカル軸は原点
 を持つワールド座標フレームを表します。.ワールド座標フレームは、それに対して定義された他のすべてのフレームを持つ固定フレームであり、ヘキサコプターの移動と回転運動学を表現するのに便利です。原点
を持つワールド座標フレームを表します。.ワールド座標フレームは、それに対して定義された他のすべてのフレームを持つ固定フレームであり、ヘキサコプターの移動と回転運動学を表現するのに便利です。原点
 付きで与えられたボディ座標フレームは、ヘキサコプターの重心(CG)に位置し、ワールドフレームに対して定義されています。ボディフレーム軸はヘキサコプターに固定されています。ボディ座標フレームは、ヘキサコプターによって生成される推力の方向を定義するために使用されます。通常、空中車両の場合、風枠も車両 CG の原点で定義されます。風のフレームはヘキサコプターに作用する空気力力および瞬間を表現するために使用される。しかし、この実験の目的のために、風洞内の流れは常に水平であるため、ワールドフレームと風枠は同一であると考えます。航空機リファレンスフレームの詳細については、McClamroch7を参照してください。
付きで与えられたボディ座標フレームは、ヘキサコプターの重心(CG)に位置し、ワールドフレームに対して定義されています。ボディフレーム軸はヘキサコプターに固定されています。ボディ座標フレームは、ヘキサコプターによって生成される推力の方向を定義するために使用されます。通常、空中車両の場合、風枠も車両 CG の原点で定義されます。風のフレームはヘキサコプターに作用する空気力力および瞬間を表現するために使用される。しかし、この実験の目的のために、風洞内の流れは常に水平であるため、ワールドフレームと風枠は同一であると考えます。航空機リファレンスフレームの詳細については、McClamroch7を参照してください。
まず、表記の概要を紹介します。Lは、各ヘキサコプターモータから水平ボディ平面内の車両重心までの腕長であり、総モータ推力大きさはボディフレームz方向に与えられ、作用する。トルクの大きさは、ボディフレーム参照軸を表す下付き文字 で与えられます。
で与えられます。
 と、
と、 それぞれの風または同等の世界フレーム軸に沿ったヘキサコプタードラッグ係数を表
それぞれの風または同等の世界フレーム軸に沿ったヘキサコプタードラッグ係数を表 し、ヘキサコプターの質量であり、
し、ヘキサコプターの質量であり、 重力加速度である。モータRPM値の総推力と回転トルクは、次の方法で与えられます。
重力加速度である。モータRPM値の総推力と回転トルクは、次の方法で与えられます。
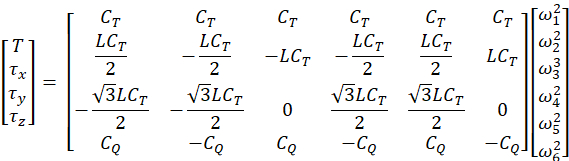 (6)
(6)
次に、世界フレーム内の線形運動のニュートン方程式を次のように定義できます。
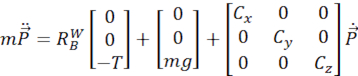 (7)
(7)
回転行列 は、Z-X-Yオイラー角度回転によって定義されます。
は、Z-X-Yオイラー角度回転によって定義されます。
 (8)
(8)
ヨー角度() がZ軸を中心に回転する場合、ロール角度()
がZ軸を中心に回転する場合、ロール角度() はX軸を中心とした回転、ピッチ角度()
はX軸を中心とした回転、ピッチ角度() はY軸を中心とした回転、短音表記
はY軸を中心とした回転、短音表記 は各角度です。
は各角度です。
これらの実験では、線形運動でヘキサコプターに作用する空力力のみが関係していますが、ヘキサコプターのダイナミクスを理解する上で完全性を持つために、運動の姿勢方程式を以下に定義します。まず、pはボディのX軸に関する角速度として定義され、qはボディのY軸に関する角速度であり、rはボディのZ軸に関する角速度である。
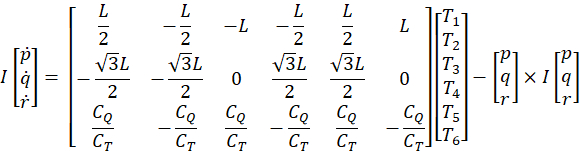 (9)
(9)
 スラスターiによって加えられる上向きの力であり、私はビフィラル振り子を用いて決定することができる慣性マトリックスのヘキサコプターモーメントである。この手順の詳細については、Quan8から入手できます。ボディとワールドフレームの角速度は、次のように関連しています。
スラスターiによって加えられる上向きの力であり、私はビフィラル振り子を用いて決定することができる慣性マトリックスのヘキサコプターモーメントである。この手順の詳細については、Quan8から入手できます。ボディとワールドフレームの角速度は、次のように関連しています。
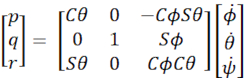 (10)
(10)
手順
このプロトコルはヘキサコプターの推力および空気力学を特徴付けます。この実験では、ヘキサコプターに市販の市販部品を使用し、詳細を表2に示します。フライトコントローラーでは、ヘキサコプターに発行された個々のモーターコマンドを制御する柔軟性を提供するオープンソースのオートパイロット、Librepilot 9を選択しました。
ロードセルとヘキサコプターを取り付けるためのテストスタンドは、積層合板を使用して社内で製造され、図2に示されています。テストスタンドを設計する際には、マルチコプターの攻撃角度を正確に調整し、モータの操作中に発生する曲げ力や振動に耐えるには十分に剛性が必要です。
6 軸ロード セルはテスト スタンドに取り付けられ、データ集録ボードに接続されています(図 3に示す)。エアロダイナミクスと推力は、ロードセルによってヘキサコプターのボディフレームに感知されます。ひずみゲージデータは、信号コンディショナーを通過します。データ集録(DAQ)ボードは、ロードセルメーカーが提供するキャリブレーション手順を使用してアナログ力とトルクコンポーネントを取得します。DAQボードは、これらの値を高速バッファに格納し、後で永続ディスクに保存します。
このプロトコルについては、まず、個々のモータによって生成される力を決定する。次に、裸の機体に作用する力を決定し、続いて、モータRPMコマンドの関数としてヘキサコプター全体によって生成される力を決定します。テストごとにすべてのモータに同じ RPM コマンドを発行します。
1. ダイナモメーター実験
ダイナモメーターは推力、トルク、RPM、電池電圧および電流を含む変数の直接測定を可能にする。電力、機械的電力、モータ効率などのパラメータは、方程式 (3)、(4)、および (5) から導き出すことができます。
- USB コネクタを使用してダイナモメーターを DAQ コンピュータに接続します。
- ダイナモメーターで提供されるグラフィカル ユーザー インターフェイス (GUI) を実行します。
- 提供される画面上の指示に従ってダイナモメーターを校正します。プロンプトが表示された場合は、ウェイトと既知のレバーアームを使用します。
- ダイナモメーターテストスタンドにモーターを取り付けます。
- 図 4 に示すように、プロペラをプーラー(トラクター)構成に取り付けます。
- バッテリーをダイナモメーターに接続します。
- Cクランプを使用してダイナモメーターをワークベンチにしっかりと固定します。
- ステップ入力プログラムを実行し、推力、トルク、モータRPM、モータ電流、パルス幅変調(PWM)「スロットル」コマンドを含む測定パラメータを記録します。
2. 静的推力試験
- 取り付けネジを使用して、ロードセルテストスタンドのヘキサコプターを固定します。
- データ集録システム(DAQ)を開き、ロードセルひずみゲージバイアスプログラムを実行します。
- マイクロUSBケーブルを使用してヘキサコプターフライトコントローラをコンピュータに接続し、グランドコントローラステーション(GCS)ソフトウェアを開きます。
- 電源装置をヘキサコプターに接続します。
- GCS の [構成] タブ -> 出力を選択します。すべてのモータをリンクし、出力のライブテストを確認します。
- 目的のスロットル コマンドを 1300 ミリ秒に設定します。
- システムを数秒間安定させ、DAQ プログラムを実行してロード セルからデータを収集します。
- データ収集が完了したら、モータを停止します。
- 手順 3 を繰り返します。スロットル コマンド 1500 ミリ秒と 1700 ミリ秒の場合は 6 ~ 3.8 です。
- DAQシステムに保存されたデータをデータ処理コンピュータと長期ストレージに転送します。
3. 動的推力試験
一連の風洞試験を実施して、ヘキサコプターの線形空力力(主に揚力とドラッグ)を、さまざまな対気速度と入射角にわたって特徴付け、解析します。風洞実験中、ヘキサコプターは安定した飛行状態にあると仮定される。したがって、ヘキサコプター速度ベクトルの大きさは対気速度と同じであり、ワールドフレームでは水平であると仮定されます。揚力とドラッグ力は、主にヘキサコプターの周囲の空気の流れに起因します。リフトとドラッグの力は、ヘキサコプター上の総リフトと総ドラッグを特徴付けることを想定しています。側力はごくわずかです。
この実験で行われる実験手順は、フォスター10およびラッセル11で報告されたものと類似している。風洞試験中、ヘキサコプターは、すべてのテストを通じて一貫した電力と電圧レベルを保証するために、建物(AC)電源に接続された電源コンバータによって駆動されました。高RPMのモータは、かなりの電流を消費する可能性があります。動作中にワイヤ全体に顕著な電圧降下を防ぐために、低ゲージと短い長さのワイヤを使用してください。
- ロードセルテストスタンドにヘキサコプターを取り付けます。
- ロードセルを DAQ コンピュータに接続し、静的推力テストで説明した手順を使用してヘキサコプターを GCS に接続します。
- テストスタンドをCクランプで風洞の基部に固定します。
- マルチコプターが風洞の壁、床、天井を十分にクリアして、自由な流れの乱れや反射を最小限に抑えるようにしてください。
- ピトー管をヘキサコプターから数フィート離れた場所に取り付け、邪魔されない気流をサンプリングします。ピトー圧力センサをDAQシステムに接続します。
- テストスタンドのヒンジジョイントを調整して、ヘキサコプターのピッチ角度を0°に設定します。風洞では、ヘキサコプターのピッチ角度と攻撃角度は同じです。
- バイアスプログラムを実行して、ロードセル電圧バイアスを確立します。
- 風洞を風速 2.2 m/s に初期化します。
- 自由流流速が所望の値に落ち着いたら、ヘキサコプターモーターをオフにしてロードセルからベースラインFT測定値を収集します。
- スロットル コマンドを 1300 ミリ秒に初期化し、FT およびピトー データを収集する前に、風洞内の対気速度を落ち着かせてください。
- 1500 ミリ秒と 1700 ミリ秒のスロットル コマンドの場合は、手順 3.7 ~ 3.9 を繰り返します。
- 表 1 に示すように、異なるヘキサコプターピッチ角度と風洞対気速度値に対して手順 3.5 ~ 3.10 を繰り返します。
結果
ダイナモメーターテスト
図5-6では、プロットは、モータRPMを増加させ、それぞれ推力とトルクの変動を示しています。これらのプロットから、マルチコプターがホバリングするために必要な最小モータRPMを決定することができる。複数のプロペラからのデータを示すプロットは、シャルマ12から得ることができる。また、推力対RPMとモーメント対RPMの二次関係は、式(1)および(2)に記載されている明確に観察することができる。この二次関係を使用して、6040  プロペラの係数と係数を次に示します。
プロペラの係数と係数を次に示します。

図7は、電力消費の増加に対応するRPMの増加がモータ効率の低下をもたらすことを示している。異なるプロペラに対して同様の実験を行い、モータープロペラペアのモータ効率を得ることができます。このような実験の結果は、マルチコプターで使用される最適なモータープロペラペアを決定するために車両設計中に有用である。これらの決定は、飛行の持続時間や速度など、目的のミッション パラメータに基づいています。
低コストのヘキサコプターには直接RPMセンサフィードバックがないため、RPM、電力、スロットル(PWM)コマンドに表面を取り付け、RPMを推定します。この表面適合は、電力およびPWM値の関数としてRPMを推定するために使用されます。ダイナモメーターから収集されたデータに基づいて、表面適合度を図8に示し、対応する方程式を示します。



ここで、 モータPWM(スロットル)設定は、
モータPWM(スロットル)設定は、 標準偏差201.9
標準偏差201.9 の平均バイアス値1550によって正規化され、標準偏差55.75Wのバイアス71.11Wで正規化されます。
の平均バイアス値1550によって正規化され、標準偏差55.75Wのバイアス71.11Wで正規化されます。
ダイナモメーターデータを分析した後、検証のために2番目のデータセットが収集され、関数への 入力として提供されました。次に、図 9および図 10に見られるように、結果は RPM 変動の時系列でプロットされます。これらのプロットは、図 9 に示すように、フィットが実際の RPM の 95% の境界内に RPM を推定することを確認します。
入力として提供されました。次に、図 9および図 10に見られるように、結果は RPM 変動の時系列でプロットされます。これらのプロットは、図 9 に示すように、フィットが実際の RPM の 95% の境界内に RPM を推定することを確認します。
風洞の結果
風洞での実験は、表1の試験マトリックスに従って行った。複雑さを軽減するために、ゼロヨー(サイドスリップ)角度条件が常に維持されました。これは、カメラやその他のセンサーが優先的な前方向きで取り付けられているほとんどのフライト プロファイルと一致します。ドラッグとリフトのバリエーションは、ヘキサコプターの異なるピッチ角度に対してプロットされ、図11および図 12にそれぞれ示されています。両方のプロットは、スロットルコマンドを増加させることで、揚力(モータ推力)の大幅な増加をもたらすことを示しています。同様に、風洞速度の増加は、ヘキサコプターに作用する抗力の有意な増加をもたらす。これらの傾向は方程式(7)と一致しています。
静的推力モデルは、ダイナモメーターテストのみを必要とします。しかし、動的推力とドラッグの正確な推定を得るためには、FTロードセルセンシングを用いた風洞実験が必要でした。収集されたデータを使用すると、正確なヘキサコプターFTモデリングを可能 にするために、ピッチ角度とフリーストリーム対気速度の関数として、ルックアップテーブルを開発し、係数をドラッグすることができます。
にするために、ピッチ角度とフリーストリーム対気速度の関数として、ルックアップテーブルを開発し、係数をドラッグすることができます。
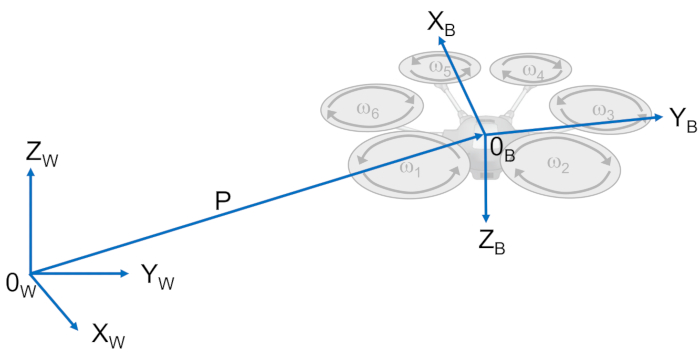
図 1.参照ワールドとボディ座標フレーム。この図のより大きなバージョンを表示するには、ここをクリックしてください。

図 2.マルチコプターロードセルテストスタンド。この図のより大きなバージョンを表示するには、ここをクリックしてください。
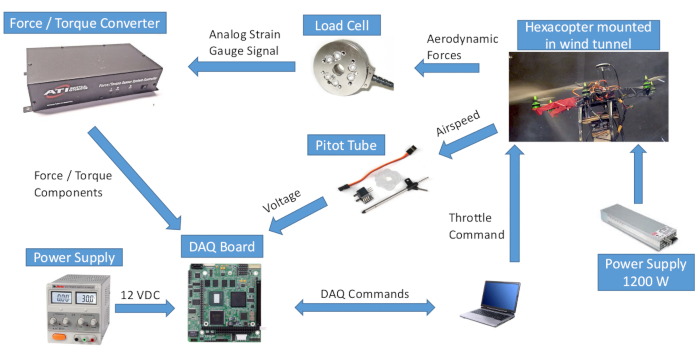
図 3.風洞データ集録(DAQ)システムダイアグラム。この図のより大きなバージョンを表示するには、ここをクリックしてください。
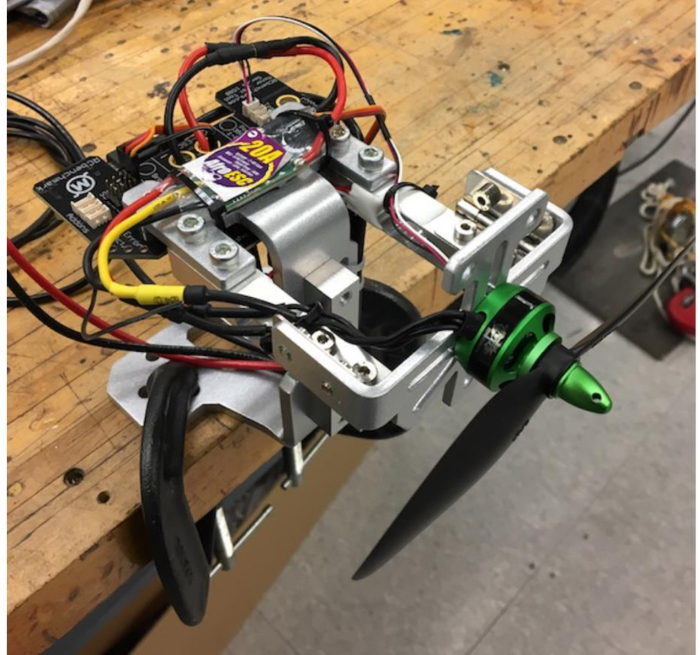
図 4.ダイナモメーターの設定。この図のより大きなバージョンを表示するには、ここをクリックしてください。
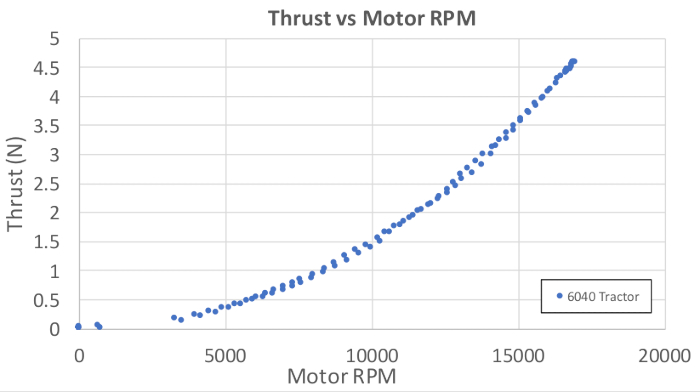
図 5.モータ推力とRPMの関係。この図のより大きなバージョンを表示するには、ここをクリックしてください。
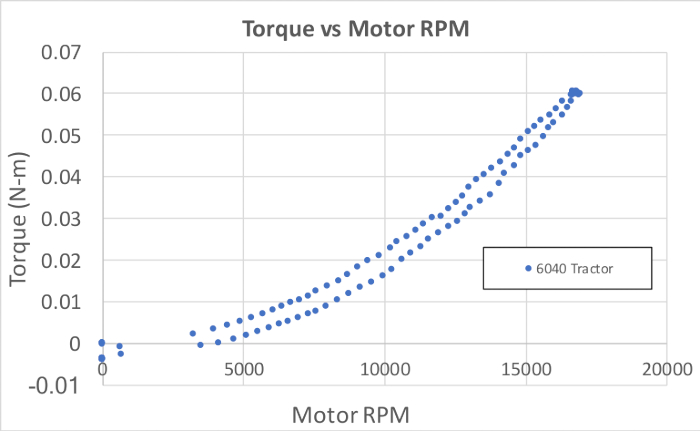
図 6.モータトルクとRPMの関係この図のより大きなバージョンを表示するには、ここをクリックしてください。
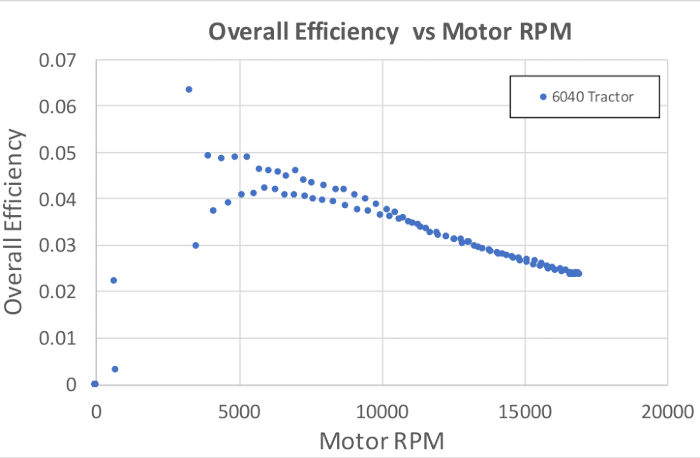
図 7.全体的なモータ効率とRPM。この図のより大きなバージョンを表示するには、ここをクリックしてください。
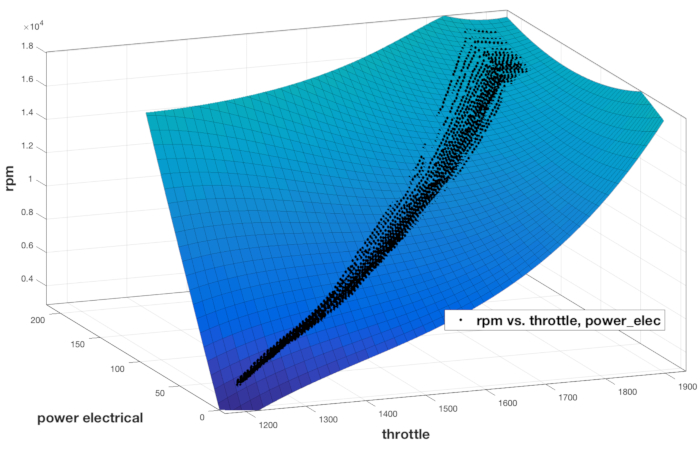
図 8.表面はスロットル(PWM)、電力、およびRPMの上にフィットします。この図のより大きなバージョンを表示するには、ここをクリックしてください。

図 9.ダイナ モメーターから直接測定されたRPMを使用した検証。この図のより大きなバージョンを表示するには、ここをクリックしてください。
モメーターから直接測定されたRPMを使用した検証。この図のより大きなバージョンを表示するには、ここをクリックしてください。
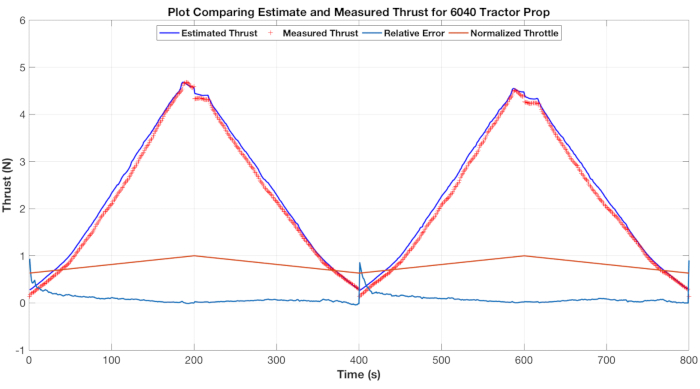
図 10.測定された推力データを用いる推定推力データの検証。この図のより大きなバージョンを表示するには、ここをクリックしてください。
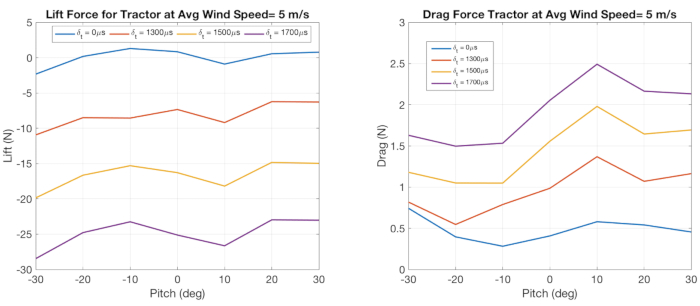
図 11.5 m/s の一定の風速を与えられた異なるピッチ角度とスロットルコマンドのためのロードセルリフトとドラッグフォースは、この図のより大きなバージョンを表示するには、ここをクリックしてください。

図 12.8.47 m/sの一定の風速を与えられた異なるピッチ角度とスロットルコマンドのためのロードセルリフトとドラッグフォースは、この図のより大きなバージョンを表示するには、ここをクリックしてください。
表 1.風洞試験マトリックス
| 風洞試験マトリックス | |||
| 風速(m/s) | ピッチ角度 (°) | ヨーアングル(°) | スロットル コマンド (ミリ秒) |
| 2.2 | 30~-30 | 0 | 0 および 1300 から 1700 |
| 4.5 | 30~-30 | 0 | 0 および 1300 から 1700 |
| 6.7 | 30~-30 | 0 | 0 および 1300 から 1700 |
| 8.9 | 30~-30 | 0 | 0 および 1300 から 1700 |
表 2.部品一覧
| ヘキサコプターの部品一覧 | |||||
| Sr いいえ | パートなし | 説明 | Img | リンク | 数量 |
| 1 | SKU: 571000027-0 | ホビーキング™トーテムQ450ヘキサコプターキット |  |
https://hobbyking.com/en_us/hobbykingtm-totem-q450-hexacopter-kit.html | 1 |
| 2 | SKU: 571000064-0 | オープンパイロットCC3D革命(レボ) 32ビットF4ベースのフライトコントローラw/統合433Mhz OPLink |  |
https://hobbyking.com/en_us/openpilot-cc3d-revolution-revo-32bit-flight-controller-w-integrated-433mhz-oplink.html | 1 |
| 3 | SKU: 571000065-0 | オープンパイロット OPLink ミニ グラウンド ステーション 433 MHz |  |
https://hobbyking.com/en_us/openpilot-oplink-mini-ground-station-433-mhz.html | 1 |
| 4 | SKU: 9536000003-0 | マルチスターエリート2204-2300KV 3-4s 4パック(2/CCW 2/CW) |  |
https://hobbyking.com/en_us/multistar-elite-2204-2300kv-set-of-4-cw-ccw-2-ccw-2-cw.html | 2 |
| 5 | SKU: 9192000131-0 | アフロ 20A ムティローター ESC (サイモンク ファームウェア) |  |
https://hobbyking.com/en_us/afro-esc-20amp-multi-rotor-motor-speed-controller-simonk-firmware.html | 8 |
| 6 | SKU: T2200.3S.30 | ターニギー2200mAh 3S 30Cリポパック |  |
https://hobbyking.com/en_us/turnigy-2200mah-3s-30c-lipo-pack.html | 1 |
| 7 | SKU: 9171000144 | ホビーキングオクトコプター配電ボード |  |
https://hobbyking.com/en_us/hobby-king-octocopter-power-distribution-board.html | 1 |
| 8 | SKU: 426000022-0 | キングコングマルチロータープロップ6x4 CW/CCW |  |
https://hobbyking.com/en_us/kingkong-multirotor-propeller-6x4-cw-ccw-black-20pcs.html | 1 |
| 8 | SKU: 329000304-0 | ジェムファンプロペラ 5x3 ブラック (CW/CCW) (2個) |  |
https://hobbyking.com/en_us/gemfan-propeller-5x3-black-cw-ccw-2pcs.html | 10 |
| 9 | - | AR610受信機付きスペクトラムDX6トランスミッタシステムMD2 |  |
https://www.amazon.com/Spektrum-Transmitter-System-AR610-Receiver/dp/B01B9DYOWG/ref=sr_1_2?ie=UTF8&qid=1494000219&sr=8-2&keywords=spektrum+dx6 | 1 |
| 10 | 709-RSP-1600-12 | スイッチング電源 1500W 12V 125A |  |
https://www.mouser.com/ProductDetail/Mean-Well/RSP-1600-12/?qs=%2fha2pyFadujYDPrAgY3T1JlGoR5AZMKL7jhmRydJUc1Z44%252bNekUvbQ%3d%3d | 1 |
| DAQ のパーツ一覧 | |||||
| Sr いいえ | パートなし | 説明 | Img | リンク | 数量 |
| 1 | ATHM800-256ALP Rev F | アテナ II PC /104 SBC |  |
http://www.diamondsystems.com/products/athenaii | 1 |
| 2 | SI-145-5 | ミニ45フォース/トルクセンサー |  |
http://www.ati-ia.com/products/ft/ft_models.aspx?id=Mini45 | 1 |
| 3 | - | ホビーパワー対気速度センサーMPXV7002DP差圧 |  |
https://www.amazon.com/Hobbypower-Airspeed-MPXV7002DP-Differential-controller/dp/B00WSFWO36/ref=pd_day0_21_2?_encoding=UTF8&pd_rd_i=B00WSFWO36&pd_rd_r=8KRZ03PR2XAJ1HXD4BKS&pd_rd_w=M1tek&pd_rd_wg=LVHjU&psc=1&レフリッド=8KRZ03PR2XAJ1HXD4BKS | 1 |
| ダイナモメーターの部品一覧 | |||||
| Sr いいえ | パートなし | 説明 | Img | リンク | 数量 |
| 1 | シリーズ-1580 | RCベンチマークダイナモメーター |  |
https://www.rcbenchmark.com/dynamometer-series-1580/ | 1 |
申請書と概要
ここでは、ヘキサコプターに作用する空気力力を特徴付けるプロトコルについて説明する。このプロトコルは、他のマルチコプター構成に直接適用できます。空気力の適切な特性評価は、制御設計を改善し、飛行エンベロープの限界を理解し、Xiang13のように局所的な風原を推定するために必要です。消費電力とスロットルコマンドに基づいてモータRPMを決定するための提示されたプロトコルは、RPMセンシングのない低コストの電子速度コントローラ(ESC)を使用する場合に、RPMと推力を推定する直接アプリケーションを持っています。 最後に、軌道追跡のためのモデル予測制御のような高度な制御技術の適用は、Kamel14で説明するように、車両の空力学および推力の知識を必要とする。
タグ
スキップ先...
このコレクションのビデオ:

Now Playing
マルチコプターエアロダイナミクス:ヘキサコプター上の推力の特徴付け
Aeronautical Engineering
9.2K 閲覧数

模型航空機の空力性能:DC-6B
Aeronautical Engineering
8.3K 閲覧数

プロペラの特性評価:性能のピッチ、直径、ブレード数の変動
Aeronautical Engineering
26.5K 閲覧数

翼挙動:クラークY-14翼上の圧力分布
Aeronautical Engineering
21.2K 閲覧数

クラークY-14ウィング性能:ハイリフトデバイス(フラップとスラット)の展開
Aeronautical Engineering
13.4K 閲覧数

乱流球法:風洞流量の評価
Aeronautical Engineering
8.7K 閲覧数

円筒形のクロスフロー:圧力分布の測定とドラッグ係数の推定
Aeronautical Engineering
16.3K 閲覧数

ノズル解析:収束と収束発散ノズルに沿ったマッハ数と圧力の変動
Aeronautical Engineering
38.0K 閲覧数

シュリーレンイメージング:超音速流機能を可視化する技術
Aeronautical Engineering
11.7K 閲覧数

水洞における流れの可視化:デルタウィング上の最先端渦の観察
Aeronautical Engineering
8.2K 閲覧数

表面染料フロー可視化:超音速流のストリークラインパターンを観察する定性的方法
Aeronautical Engineering
4.9K 閲覧数

ピトースタティックチューブ:空気の流速を測定する装置
Aeronautical Engineering
49.3K 閲覧数

一定温度麻酔:乱流境界層の流れを研究するツール
Aeronautical Engineering
7.3K 閲覧数

圧力トランスデューサ:ピトースタティックチューブを用いてキャリブレーション
Aeronautical Engineering
8.5K 閲覧数

リアルタイムフライトコントロール:埋め込みセンサーキャリブレーションとデータ取得
Aeronautical Engineering
10.3K 閲覧数
Copyright © 2023 MyJoVE Corporation. All rights reserved