
Method Article
연구 집단 인간 행동에 대 한 벌집 패러다임
요약
여기, 우리는 컴퓨터 기반, 멀티 에이전트 게임 벌집, 집단적 인간의 움직임 동작을 통해 블랙-도트-아바타의 가상 2D 육각 운동장에 실험적인 수사를 가능 하 게 제시. 다른 목표 필드 또는 비전 반경에 가변 인센티브 같은 실험 조건을 설정할 수 있습니다, 그리고 인간의 운동 행동에 그들의 효과 조사 수 있습니다.
초록
그룹 운동 등 집단 인간 행동은 자주 놀라운 패턴 및 규칙성, 리더십의 출현 등을 보여줍니다. 최근 문학 이러한 패턴, 그룹의 글로벌 수준에서 자주 볼 수는 자기 조직, 개별 동작을 따라 하는 몇 가지 간단한 로컬 매개 변수를 기반으로 드러났다. 인간의 집단 행동의 역학을 이해 조정 및 그룹 및 군중 시나리오, 이상적인 배치와 건물에 비상구의 수 등에서 리더십을 향상 시킬 수 있습니다.
이 문서에서는, 선물이 실험 패러다임 벌집 조건과 인간의 집단 행동의 효과 체계적으로 조사 하는 데 사용할 수 있습니다. 이 패러다임 사용 컴퓨터 기반 다중 사용자 플랫폼을 형성 하 고 다양 한 유형의 연구 질문에 적응 수 있는 설정을 제공 합니다. 연구 질문에 따라 경험에 의해 상황 조건 (예를 들어, 특정 동작, 불확실성의 다양 한 학위 자원과 금융 인센티브에 대 한 비용 편 익 비율)를 설정할 수 있습니다. 각 참가자의 움직임은 6 각형 좌표 50 ms의 정확도에 타임 스탬프와 개별 Id로 서버에서 기록 됩니다. 따라서, 통계는 운동장에 정의할 수 있습니다 및 운동 매개 변수 (예를 들어, 거리, 속도, 클러스터링, 등) 참가자의 시간이 지남에 따라 측정할 수 있다. 운동 데이터에 동일한 실험 설정 내에서 획득 하는 설문 조사에서 비 컴퓨터 데이터와 결합할 수 있습니다.
벌집 패러다임 인간 운동 실험의 새로운 종류에 대 한 방법을 포장입니다. 우리는 여기이 실험 의미 인간의 집단 행동의 우리의 이해를 깊게 하기 위해 충분 한 내부 타당성을 가진 결과 렌더링할 수 있습니다 보여 줍니다.
서문
실험적으로 어떻게 집단 인간의 움직임을 조사 하는 방법론적 패러다임을 제공 하는 컴퓨터 기반 멀티 에이전트 게임 벌집1 패턴 및 그룹 구조는 개인적인 행동에서 등장. 인간의 참가자 시각적으로 벌집 (그림 1)을 닮은 육각형 가상 운동장에 아바타 (검은 점)로 표시 됩니다. 참가자는 자신의 아바타를 통해 마우스 클릭 목표 육각형에 도달, 이동 리소스 (비디오 1), 지출 및 점착 력이 있는 그룹 (비디오 2)를 구축 하 여 그들의 금전적인 보상을 극대화를 이동 합니다. 공간 조건 (예를 들어, 비전 반경), 보상 구조 (예: 통화 목표 분야), 및 커뮤니케이션 채널을 검색 하기 위해 조작할 수 있습니다 그리고 어느 정도 이러한 조건 규칙 조정 및 리더십 영향 집단 운동.
게임의 절차/조건 규칙, 목표, 그리고 보상 동기 부여 인간의 집단 움직임을 조사 하기 위해 사회 심리학자에 의해 설계 되었습니다. 동물 메뚜기 뿐만 아니라 인간 군중, 하나 로컬 규칙 다음에 나오는 개별 동작에서 떨어지고 응급 현상 (즉, 글로벌 패턴)을 관찰할 수 있다. 예를 들어 물고기의 학교와 새 들의 떼 공간 목표2,3,4, 글로벌 또는 개별 간 통신에 대 한 그들의 용량을 줄일 수 있는 큰 그룹 크기에도 불구 하 고 향해 일관 된 엔티티로 이동 것으로 보인다. 경험적 연구5,,67, 행동 모델링8,,910및 컴퓨터 시뮬레이션11,12, 13 다양 한 종, 인간14,,1516를 포함 하 여 그룹 수준에서 복잡 한 패턴 내부 통제 또는 외부 감독 없이 등장으로 나타났습니다. 로컬 개인 운동 하 고, 종종, 미세한 수준에 간단한 규칙은 거시적인 수준에 질서 있는 움직임을 생성 하기에 충분. 이러한 실험 증가 증거,2,6 큰 메뚜기 뿐만 아니라 작은 그룹 (인간 그룹 뿐만 아니라 다른 동물 그룹) 로컬 상호 작용 규칙1에 의해 조정에 기여 한다.
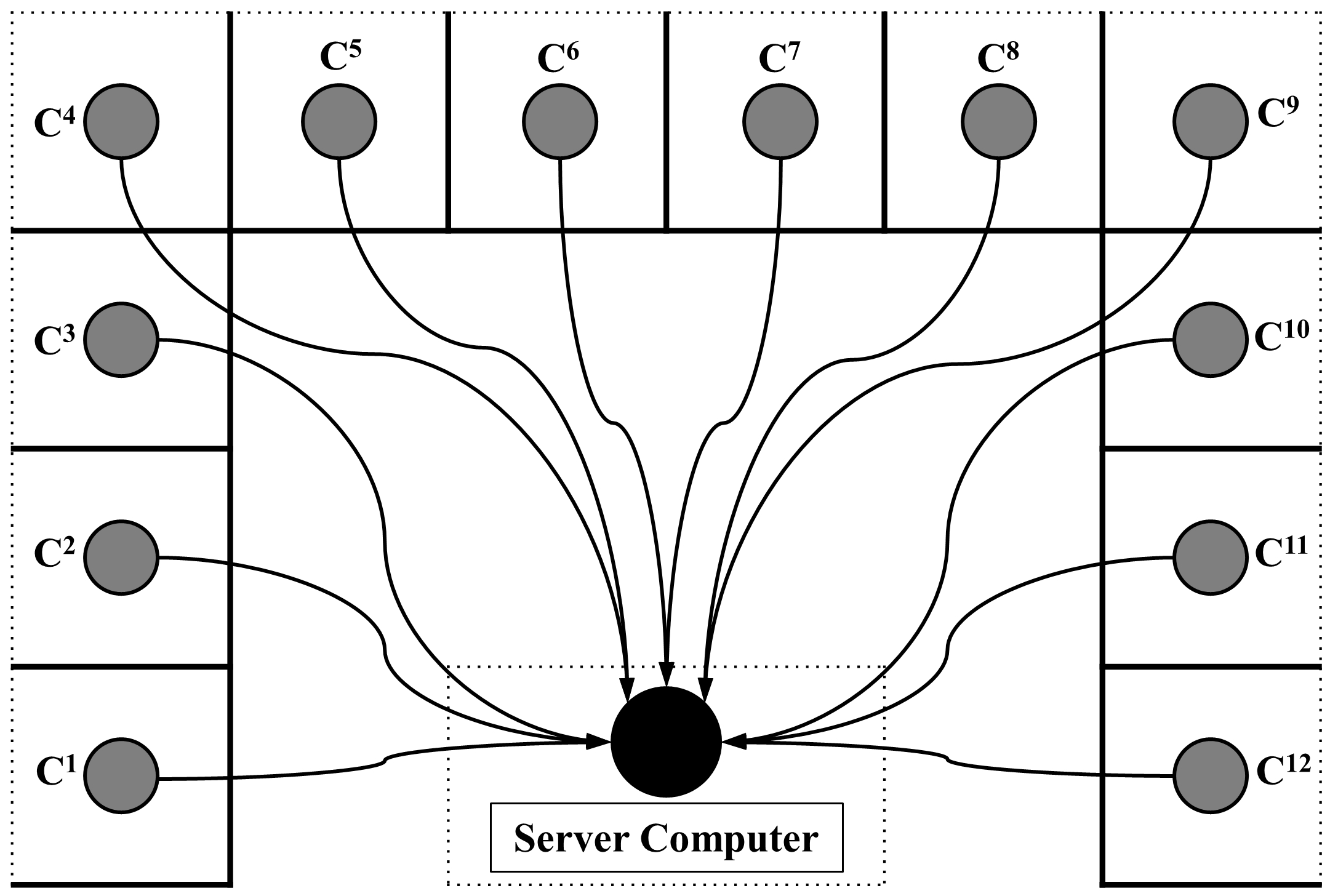
컴퓨터 기반 다중 사용자 아바타 게임을 사용 하 여 우리의 새로운 접근 방식을 동적 인간의 집단 현상 연구에 주요 장점 중 하나를 보여 줍니다. 벌집 아바타 플랫폼1,17,,1819를 사용 하 여, 개별 운동 동작 (실제 개인에 의해 지배 하는 운동)의 spatio 시간적 데이터 수집할 수 있습니다 완전히 서버에서 하 고 행동 패턴 및 집단 구조 개발 50 ms (표 1)의 정확도로 분석할 수 있습니다. 시각과 청각 감각 통신 요구에 의해 제한 될 수 있습니다으로 귀마개를 사용 하 여 파티션 벽, 그들의 워크스테이션을 인 떼 참가자 및 다른 군중 행동 조건 수 수 직선 근사 줄 실험적으로. 여러 실험1,17,,1819, 우리 비전 반경 (글로벌 대 로컬, 그림 2), (그림 3a, b 금전적 인센티브 조작 ), 하위 그룹 (그림 4), 그리고 인간의 무리를 짓는 행동17, 리더십 등 집단 행동 패턴의 출현에이 변수들의 영향을 테스트 하기 위해 다른 플레이어 (그림 5)의 공동 존재 1, 그리고 경쟁18. 데이터를 수집 하려면 10-12 노트북 및 서버 설치 사용 되었다 (그림 6).
그룹-살아있는 종에 개별 활동의 자기 조직된 조정 특히 지난 10 년 안에 많은 과학적 관심을 모으고 있다. 검사는 간단한 흔적 형성 및 경로 선택 복잡 한 출현에 개미에서 물고기 떼, 그리고 심지어 보행자2의 양방향 흐름의 분리에서 소용돌이 구조에서 광범위 한.
우리의 벌집 패러다임으로 기여 하는 상황 다양 한 옵션/제약 조건, 다양 한 행동 규칙, 및의 출현에 미세한 수준에서 개별 특성의 영향을 실험적으로 조사 하는 방법론적 접근 인 간에 있는 거시적인 행동 구조. 중요 한 장점은 그 패러다임은 엄격 하 게 제어 실험 경험, 하나의 실험의 결과 측정 하거나 비교 여러 실험 조작에 대 한 수에 의해 정의 된 것입니다. 가상 운동장 연구 디자인의 요구 사항에 따라 구성할 수 있습니다 그리고 참가자 사이 감각 커뮤니케이션 채널을 제거 하거나 실험 매개 변수에 따라 감소 수 있습니다. 또한, 환경 affordances (예를 들어, 경쟁, 비 경쟁 합 및 구조 설정) 형성 될 수 있습니다. 따라서, 우리의 플랫폼 조작 제어 변수 관련 구체적인 연구 질문에 대 한 가능성을 제공 함으로써 내부 유효성 (즉, 연구 설계는 연구 질문에 최대한 가깝게 일치) 적용을 사용 하 여 인간의 지배 운동 데이터 인간의 움직임 검사입니다. 그들은 알 수 없는 통제/insuppressible 소셜의 효과 배제 하지 않습니다 때문에 필드 실험 결과15,,2021 현실 세계의 외부 타당성 (가해질) 측면에서 혜택을 렌더링 신호 뿐만 아니라 인간1-그리고 파라-비언어 행동.
컴퓨터 기반 멀티 에이전트 게임 벌집 조정의 출현 및 가상 운동장에 자신의 아바타를 이동 하는 인간 플레이어의 리더십 패턴 조사를 역임 했다. 참가자 목표 육각형, 그룹 단결력 또한 같은 목표에 결국 공동 선수의 수에 의해 금전적 보상의 곱셈에 기반에 대 한 인센티브를 포함에 얻을 수 있는 금전적 인센티브에 대 한 지역 정보를 제공 했다 육각형입니다. 연구의 우리의 첫번째 시리즈, 우리는 실험 설정 동작 (정렬 및 결합)에 진을 치고의 두 개의 간단한 매개 변수를 제한 하 고 상호 정보 전송 "읽기/전송" 다른 참가자 들의 운동 행동만을 감소. 우리는 다음 97 작은 육각형의 구성 하 고 제한 된 선수의 소모품 운동 리소스 (가능한 움직임) 가상 운동장의 전역 또는 로컬 보기 중 다른 참가자 이동 동작의 광경 반경의 다양 한.
구체적인 연구 질문에 따라 모양 및 가상 플랫폼의 요소와 게임 했다 플랫폼에서 재생할 수 수의 실험-정의 하는 매개 변수를 디자인할 수 있습니다. 연구 목표에 따라 운동장의 크기를 변경할 수 있습니다; 색상, 모양, 그리고 아바타의 의미를 적용할 수 있습니다; 리소스를 구현할 수 있다. 그리고 보상 구조 및 콘텐츠 변경 될 수 있습니다. 더 많거나 적은 정보, 불확실성, 그리고 충돌 기본 구현된22될 수 있습니다. 다양 한 글로벌 플레이어-보기 및 제어도 가능 하다. 따라서, 를 통해 실험 지침, 실험의 환경 affordances 변경 (예를 들어, 탈출 시나리오 대 합의) 될 수 있습니다. 다음 섹션에서 우리는 어떻게 이러한 변수는 구체적인 연구 질문에 대답을 사용 하는 이러한 매개 변수 중 일부는 실제 연구를 설명 하 여 적용할 수 있습니다 명확히 것입니다.
프로토콜
데이터 수집 및 데이터 분석이 프로젝트에 괴팅겐 대학 (제안 039/2012)의 심리학의 게오르그-엘리야-뮐러 연구소의 윤리 위원회에 의해 승인 되었습니다.
1. 실험 설치
- 컴퓨터 실험실 또는 다른 허용 된 지역 LAN (로컬 영역 네트워크)로 구성할 수 있는 개별 워크스테이션 같은 트래픽이 높은 영역에서 떨어져 있는 위치를 선택 합니다.
- 실험 뿐만 아니라 한 컴퓨터 서버 (그림 6) 기능을 사용 하는 동일한 종류의 10 ~ 12 노트북에 대 한 준비. 서버 프로그램 뿐만 아니라 클라이언트 프로그램 필요 모든 일반적인 운영 체제에 사용할 수 있는 자바 런타임 환경 (클라이언트 라즈베리 파이 충분 수 있습니다).
- 장비 구성
- 자 그림 7에서 같이 개별 워크스테이션 테이블에 노트북을 정렬 합니다.
- 이더넷 케이블을 통해 서버 컴퓨터 및 로컬 영역 네트워크를 네트워크 스위치에 노트북을 연결 합니다.
- 이웃 참가자 간의 시각적 감각 통신 (눈 접촉, 손 제스처, 얼굴 표정, 등)을 방지 하기 위해 개별 워크스테이션 사이 격 벽을 설치 합니다.
- 참가자 간의 음성 통신을 방지 하기 위해 모든 참가자에 게 배포할 수 (대 한 한 번만 사용) 귀마개를 획득 합니다.
2. 참가자 모집
- 모집 위치 선택 강당의 입구 홀 같은 사람들이 많은 양의 있다.
- 주소 잠재적인 신병 실험, 실험 기간, 최대 지불의 배경 및 목적을 설명 하는 표준화 된 텍스트를 사용 하 여 성능 및 요구 사항에는 멀티 플레이어 게임에 참여에 대 한 계산 기관 소유 노트북입니다.
- 영어 및 독일어 지침과 실험에 관련 된 설문 조사 참가자 이해할 수 있다 확인 하십시오.
- 실험 디자인 색상의 사용을 포함 하는 경우 참가자 사용 되는 색상을 차별화에서 그들을 막을 수 있습니다 모든 색상 실명의 무료 인지 확인 합니다.
- 참가자 실험에 순진한 되어야 이전 참가자를 모집 하지 않습니다.
- 신병 모집 지역에서 대기실에 기꺼이 하는 리드. 친절 하 게 요청 그들은 서로 게 얘기 하지 않고 그룹 채용의 완료를 기다리고. 이 제한은 실험 결과의 무결성에 관련 되어 설명 합니다.
- 10 ~ 12 참가자 모집 되어, 일단 pre-arranged 컴퓨터 실험실 또는 실험 장소를 걸릴 것입니다 지정한 영역으로 그들을 리드.
- 참가자 파티션 쌌 다 워크스테이션에 그들의 장소를 걸릴 하기 전에 동의 지정 양식에 서명 하는 참가자를 있다.
- 모든 참가자 들에 게 위생 적이 고, 1 회 사용 귀마개를 배포 합니다. 다른 참가자와 시청각 통신 금지 그들을 알려. 따라서, 귀마개 및 파티션 쌌 다 워크스테이션의 사용은 필수입니다.
- 참가자 파티션 쌌 다 워크스테이션에 그들의 장소를가지고 있다.
3. 실험 절차
참고:이 실험 절차에 의해 사용 하는 게임 부스 외. 1 응용 프로그램 예를 들어 설명 합니다.
- 준비 단계
- 프로그램 자체는 1) runnables HC.jar, 2) 3 파일 구성, 즉 hc_server.config, hc_panel.config, 및 hc_client.config, 및 소개와 rawdata 3) 두 개의 하위 폴더를 포함 하는 zip 파일 HC.zip로 지정 됩니다.
- 서버 컴퓨터에 공유 폴더를 만들고이 폴더에는 HC.zip의 압축을 풉니다.
- 각 클라이언트 컴퓨터에 탑재 및이 공유 폴더에 액세스 하 고 터미널을 열고 (리눅스, 맥 OS X 스포트 라이트 | 검색 | 터미널) 또는 프롬프트 (윈도우: 검색 "cmd"), 각각. 각 터미널에 파일 표시 명령 "dir" 또는 "ls"를 사용 합니다.
- 명령을 실행 "java-버전" java 런타임 환경을 사용할 수 있도록 각 터미널에. 그렇지 않은 경우 계속 하기 전에 java를 설치.
- 세에서 봐 파일을 구성 합니다.
- 1) 플레이어, 2) 최소 숫자 및 각 플레이어가 만들 수 있는 움직임의 최대 숫자, 소위 너 겟과 4) 지 각 radius 조건 (로컬 또는 전역)의 3) 값의 수를 구성 하는 hc_server.configure를 편집 합니다.
참고: 두 개의 인식 조건에 글로벌 조건 (선수는 모든 참가자의 아바타의 위치를 볼 수 있습니다) 및 지역 조건 (선수만 그 아바타 옆에 자신의 아바타를 볼 수 있습니다; 그림 3 참조) - 클라이언트에 게 서버의 IP hc_client.configure를 편집 합니다.
- Hc_panel.config에 스크린의 해상도 따라 육각형의 크기를 조정 합니다.
- 1) 플레이어, 2) 최소 숫자 및 각 플레이어가 만들 수 있는 움직임의 최대 숫자, 소위 너 겟과 4) 지 각 radius 조건 (로컬 또는 전역)의 3) 값의 수를 구성 하는 hc_server.configure를 편집 합니다.
- 먼저, HC_Gui.jar (그림 8) 명령을 사용 하 여 서버 프로그램을 시작 "자바-병 HC_Gui.jar". 그런 다음 명령을 사용 하 여 각 워크스테이션에 클라이언트 프로그램을 시작 "자바-병 HC_ClientAppl.jar".
참고: 클라이언트의 화면 메시지를 표시 한다, "대기 하시기 바랍니다. 컴퓨터는 연결 서버에. " GUI 서버에서 선 각 클라이언트의 IP 주소를 표시 나타납니다. 모든 클라이언트가 연결 되어 있는 경우 메시지를 표시 하는 서버 프로그램, "모든 클라이언트 연결 됩니다. 시작 준비? "
참고:는 실험까지 세션을 준비할 수 있습니다. - 때 모든 참가자는 그들의 장소, 그들은 귀마개를 삽입 하기 전에 최종 지침을 주고.
- 세션을 시작 하려면 "확인"을 클릭 합니다. Hereon, 실험 참가자 들에 게 보이는 화면에 지시에 의해서만 제어 됩니다. 한 실험에 대 한 지침 여러 화면 페이지를 요구 하 고 읽기는 가능 하 게 페이징 참가자에 의해 필요에 따라 앞뒤로.
참고: 각 참가자를 나타냅니다, 화면에 지정 된 단추를 클릭 하 여 그 지침을 읽고는. 실험은 모든 참가자가 지시를 읽는 완료 될 때까지 시작할 수 없습니다.
- 테스트 단계
- 여부는 참가자는 마우스-제어 가상 97-육각형 벌집 운동장에 (두번 다른 참가자의 보이는 아바타 점으로 큰) 그들의 아바타 점 관찰 ( 그림 1참조).
- 필드, 다음 화면에 이전에 제공 된 지침에 따라 벌집 가상 운동장에 이동의 중심에서 테스트 단계를 시작 하는 참가자를 있다.
- 게임을 재생 하는 방법에 대 한 모든 지침 편집 가능한 html 파일로-벌집 게임의 프로그램 폴더 내에 배치 됩니다. 각각 하위 폴더 소개/드와 독일어와 영어 지침에 대 한 소개/en를 참조 하십시오.
- 자신의 아바타 도트를 이동 하는 그들의 선택의 인접 한 작은 육각형에 클릭 하는 선수가 있다. 인접 한 필드는 초기 선택 될 수 있다 고 후속 이동 합니다.
참고: 각 이동 후 작은 꼬리가 나타납니다 4000 ms는 그 환영 마지막 방향을 나타내는 각 참가자에 대 한.
- 각 참가자가 가능한 편견을 피하기 위해 한 번만 참여 하실 수 있습니다.
참고: 여기에 설명 된 게임 지침의 독서를 포함 하 여 5-10 분 필요 합니다. 전반적으로, 400 참가자 40 10 사람 그룹에 의해 부스 외. 테스트 1. - 기술 분석 하거나 참가자 실패 하는 경우 동일한 참가자와 실험을 다시 시작 하지 마십시오.
4. 테스트 후 단계
- 게임 완료 되 면, 참가자 인구 통계 데이터, 큰 5 개의 개성 요인, 스트레스 나 평온의 인식된 수준을 평가 하는 설문 조사를 기입 하 고 만족 (실험의 완료 후 지급) 지불 해야 합니다. 이러한 설문 독립 실행형 html 파일로 제공 될 수 있습니다.
- 참가자 설문 조사 작성, 하는 동안 적절 한 양의 돈 그냥 완료 벌집 게임에 익명 봉투를 준비. 각 선수에 게 지급 하는 게임의 벌집 계산 금액 서버 화면에 규정 된다.
- 그들은 종료 테스트 지역으로 참가자 들에 게 적립된 지불을 배포 합니다.
- 서버 프로그램을 종료 한 다음 서버 프로그램 닫는 완료 되 면 클라이언트 프로그램을 닫습니다.
- 표시에 의해 하루-및 타임 스탬프를 USB 메모리 실험의 2 텍스트 파일의 형태로 데이터를 전송 합니다.
결과
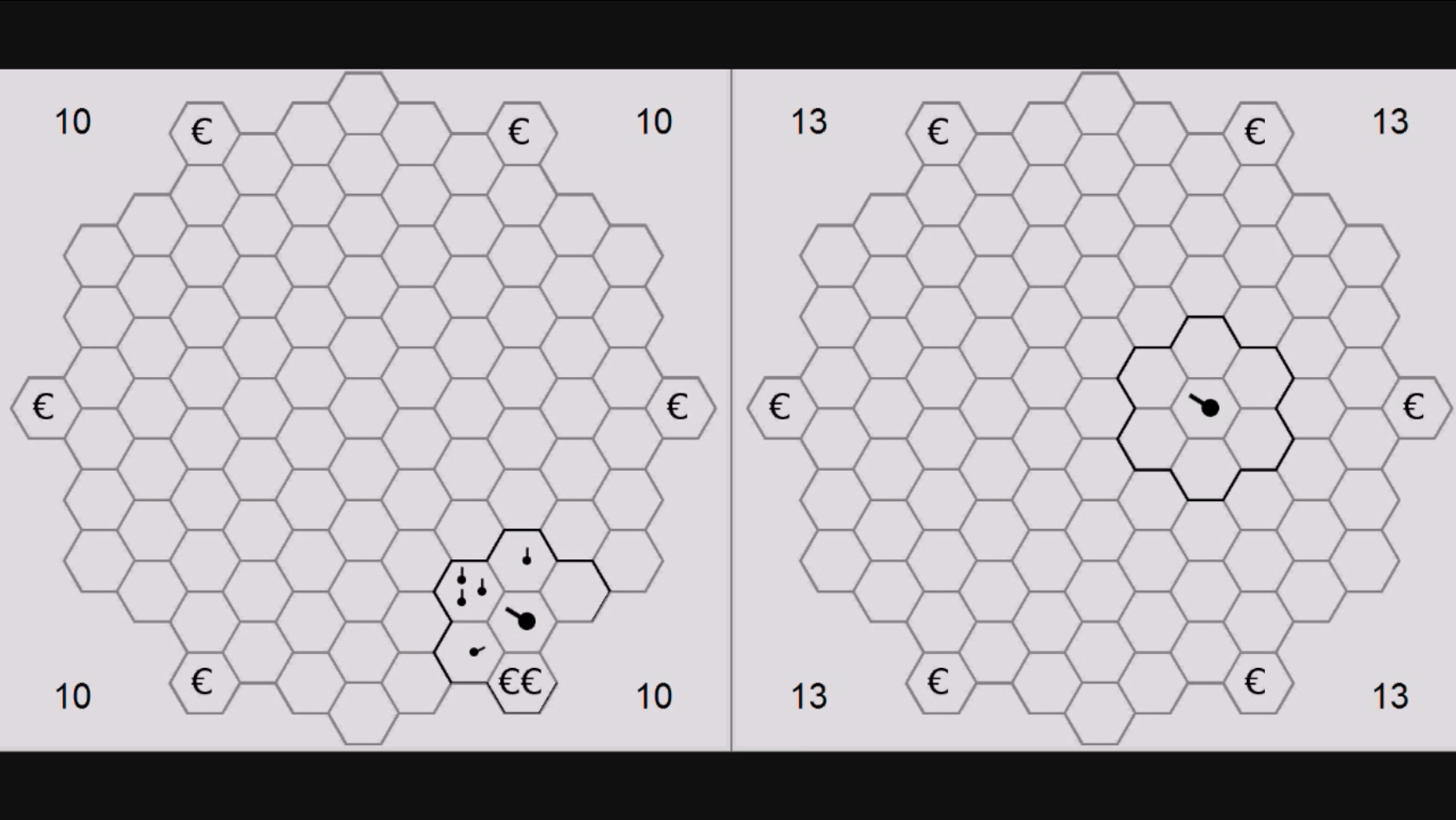
초기 실험 패러다임 시연 인간 무리를 짓는 동작 되지 않고, 다른 사람의 근접을 찾는 등의 기본적인 흔적을 보여주었다 벌집을17보상. 그 후, 우리는 질문을 해결 어떻게 개별 인간의 행동 목표는 동일한 물리적 대상/부스 외. 또한 조사 조정 될 수 있습니다 1, 뿐만 아니라 불특정 무리를 짓는 행동 뿐만 아니라 그룹 조정 및 리더십 행동에 초점. 위에서 설명한 실험 정의 매개 변수를 사용 하 여 목표 육각 위치 정의 된, 그리고 금전적 보상 옵션 공동된 목표 공유 인센티브 그룹 단결력으로 동기 부여에 따라 검사 하 사용 되었다. 그룹 단결력을 달성 하기 위해 동기 부여는 같은 목표 육각형에 얼마나 많은 다른 참가자에 따라 추가 보상 규정에 의해 강화 되었다. 각 40 10 사람 그룹 내에서 두 개의 하위 그룹 (2 명의 무작위로 선택 된 개인의 구성 소수 그룹 및 나머지 8 이루어진 대다수 그룹) 다음 단계의 정보를 제공 하 여 만들어졌습니다. 두 개의 소수 그룹 멤버 한 두 유로 상금 육각형과 5 1 유로 상금 육각형 (그림 9, 왼쪽)의 위치에 대 한 통보 했다. 다 수 그룹의 8 개 회원 2 유로 상금 육각형에 대해 알리지 않 았 고 대신 6 동일 하 게 보상된 한 유로 목표 육각형 (그림 9, 오른쪽)의 위치를 표시 했다. 참가자의 아무도 다른 하위 그룹 이었다고 들었다.
우리 설계 Couzin 외에 따라 우리의 연구 질문 ' s23 컴퓨터 시뮬레이션 모델입니다. 교환 선수 중 유일한 정보 다른 플레이어의 움직임을 인식 하는 그들의 능력 때문에, 우리를 (i)이이 정보는 정보/높은 보상된 소수 그룹의 움직임을 조정에 대 한 충분 한 목적으로 받지 않은/낮은 보상 대다수 그룹, 그리고 만약 그렇다면, (ii) 어떻게 더블 수상 목표-정보 소수 그룹 것 이다/그들의 목표는 2 유로 육각 받지 않은 대다수를 이어질 수 있습니다. 앞에서 설명 했 듯이 우리가 이러한 제한 집단 행동, 1) 정렬 (목표 육각형으로 이동 하는 그룹 구성원) 및 2) 결합의 두 가지 기본 매개 변수를 디자인 연구 (그룹 구성원 그룹으로 이동 향해 돌 봐 주). 정렬 매개 변수 우리 금전적 보수를 부여 6 목표 육각형을 설정 합니다. 단결력 매개 변수에 대 한 (즉, 협조 했다 이동 선택을 동료 참가자와 함께 이동), 우리는 참가자 자신으로 같은 육각형에 있던 끝에 아바타의 금액에 따라 보상 부여.
벌집 운동장 97 육각형을 포함합니다. 모든 참가자의 아바타는 벌집의 중간 육각형에서 함께 게임을 시작 했다. 각 선수는 최대 15 이동 수 부여 했다. 모든 인접 한 육각형을 육각형의 6 면 중 하나에 걸쳐만 그들의 아바타 (를통해 마우스 클릭) 이동 제한 했다. 게임 종료 때 모든 아바타 보수 필드 또는 모든 플레이어가 완전히 사용 했다 그들의 15 이동 수 있습니다.
세 번째 연구 질문에 대답을 추가 실험 요소가 구현 되었습니다: (iii) 다른 참가자의 인식 반경 (글로벌 대 로컬 상태) 움직임 조정에 영향을 미치는 여부. 20 그룹 (로컬 상태)만 그 아바타 옆에 그들의 아바타의 움직임을 인식 수 있는 의미는 임의의 기준 40 10 사람 그룹의 절반의 인식 제한 했다. 나머지 20 10 인 그룹 (글로벌 조건) 모든 참가자의 아바타 위치 및 움직임 인식 수 있습니다.
대답 질문 (ii) [는 소수 민족의 운동 특성 더 많은 성공을 (목표 필드 그룹 및 그러므로 더 큰 금전적 보상 성공적으로 도달)], 우리가 정의 하 고 첫번째 발동기를 포함 한 다양 한 운동 동작 분석 공유 이동 경로/방향 두 소수 참가자, 경로 길이, 움직임, 참가자, 큰 5 개의 개성 특성 (외, 개방성, 등), 컴퓨터 활용 능력 중에서 초기 이동 순서 사이의 평균 시간. 통계 절차 2 binomials와 자세한 결과 유한 혼합물 모델 부스 외 에 게시 된 1.
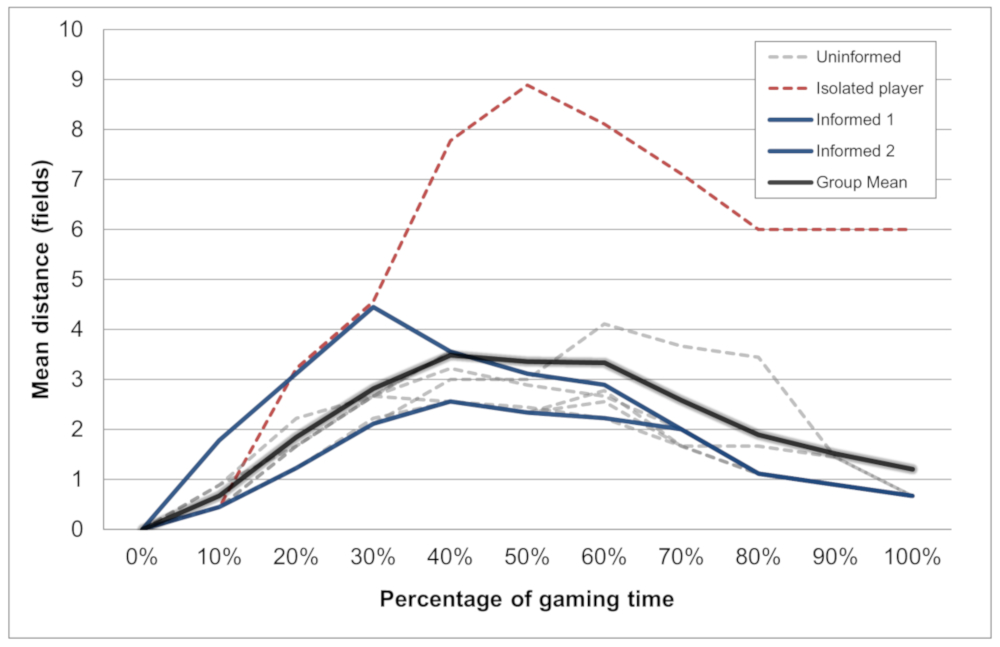
우리의 연구 시연 인간의 그룹에 할당 된 아바타는 2D 벌집에 재생 필드 (위에서 설명 된 매개 변수 및 조건에 따라 이동), 20% (2 인 소수 그룹) 그들의 움직임을 기반으로 성공적으로 이어질 수 있습니다. 다른 80%, 그들의 지 각은 운동장에만 인접 한 아바타를 제한 하는 경우에. 여기,이 2 인 소수 그룹 참가자의 성공적인 리더십 수반 그 그들의 동료 참가자 비슷한 초기 이동이 2 인 소수 참가자는 초기 이동1 (동영상 2)을 먼저 했다. 이 그룹의 운동 동작의 자세한 매개 변수를 표 2를 참조 하십시오. 시간이 지남에 따라 그룹의 분산의 심층 분석 그림 10에 제공 됩니다. 우리 또한 발견, 놀랍게도, 그 개성 변수도 이러한 소수 참가자 중 컴퓨터 활용 능력 그들의 성공에 중요 한 역할을 했다.

그림 1: 컴퓨터 기반의 멀티 에이전트 게임 벌집의 운동장. 육각형 가상 운동장에 아바타 (검은 점)로 인간의 플레이어의 시각적 표현입니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

그림 2: 로컬 대 글로벌 관점. 로컬 관점으로 참가자만 그들의 시각적 범위 내에서 다른 플레이어의 아바타를 볼 수 있습니다. 이 경우에, 표시 된 선수 (빨간색)은 4 개의 9 공동 선수를 볼 수만 있습니다. 글로벌 관점을 구성 하는 경우 모든 공동 선수의 가시성을 제공할 것 이다. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

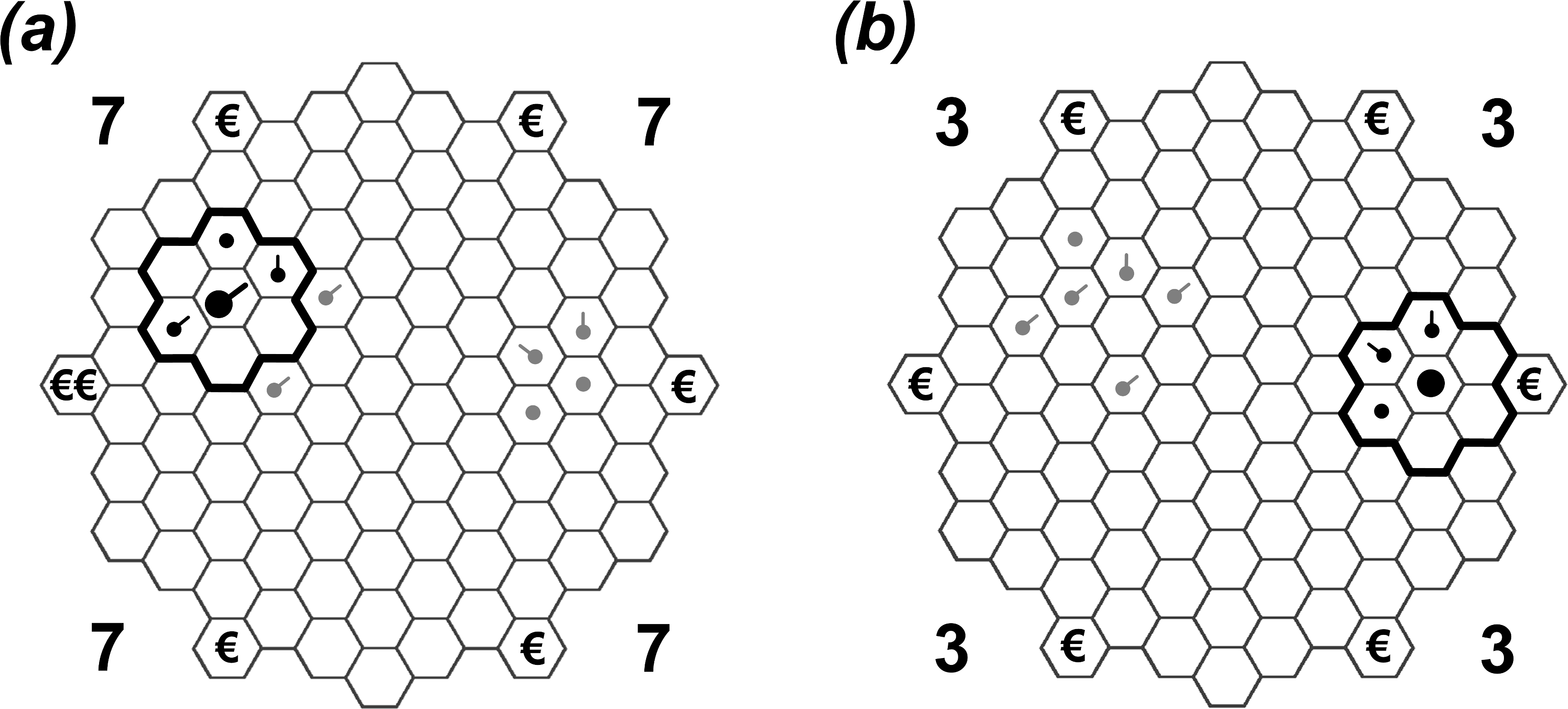
그림 3: 금전적 인센티브. 이 그림과 얼마나 금전적 인센티브 벌집 게임에서 구현할 수 있다. 아바타 표시 회색 지역 인식 반경 밖 이며 따라서 각 선수에 게 표시 되지 않습니다. 두 개의 서로 다른 관점 표시 됩니다. (a) 정보 선수:이 선수 "€€", (b) 받지 않은 선수로 표시 한 높은 보상 목표 필드와 부여: "€"로 표시 된 6 개의 동등 하 게 낮은 보상 목표 분야를 제공 하는이 선수. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

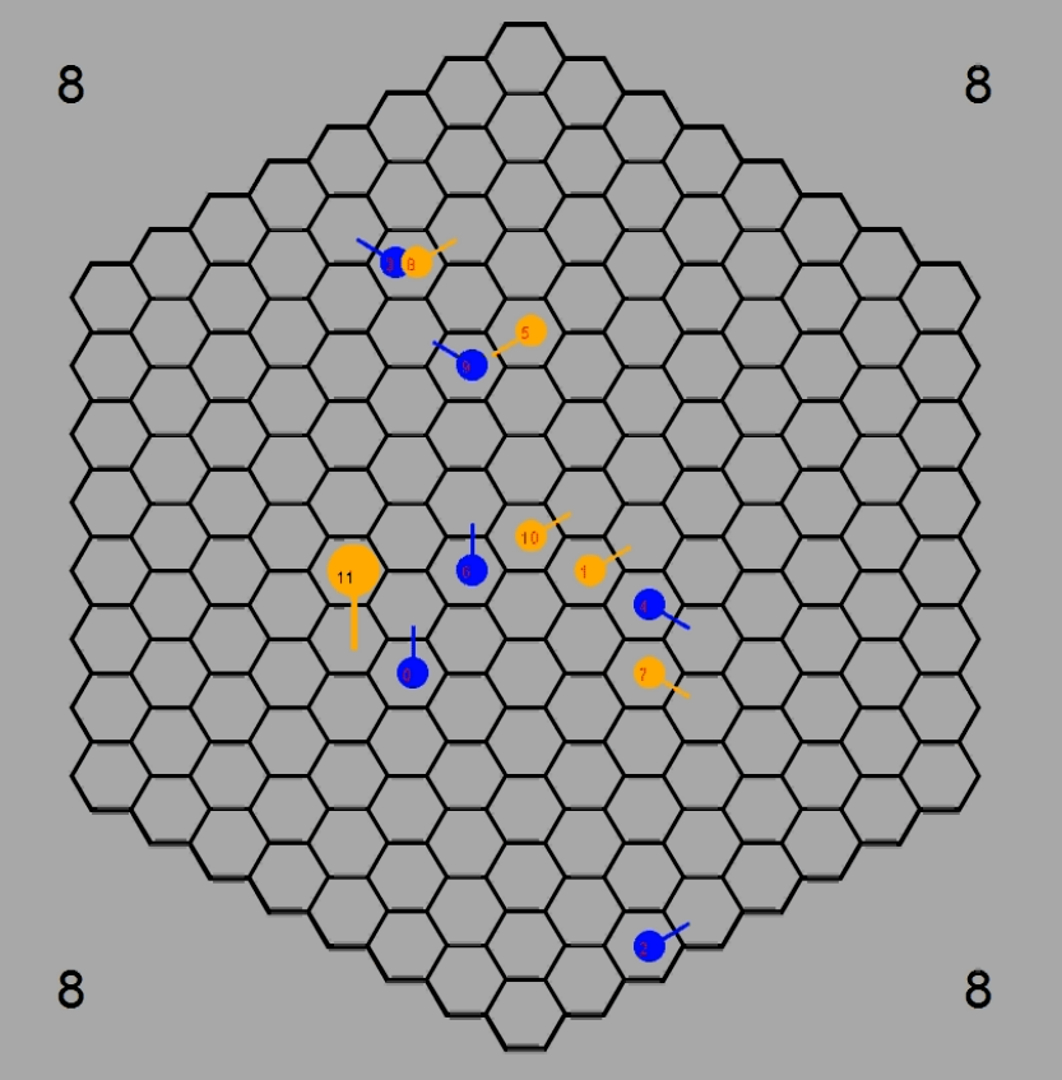
그림 4: 하위 그룹 아바타 실험. 이 시나리오에서는 두 개의 하위 그룹 참가자 아바타 파란색과 노란색으로 색칠 하 여 만들어집니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

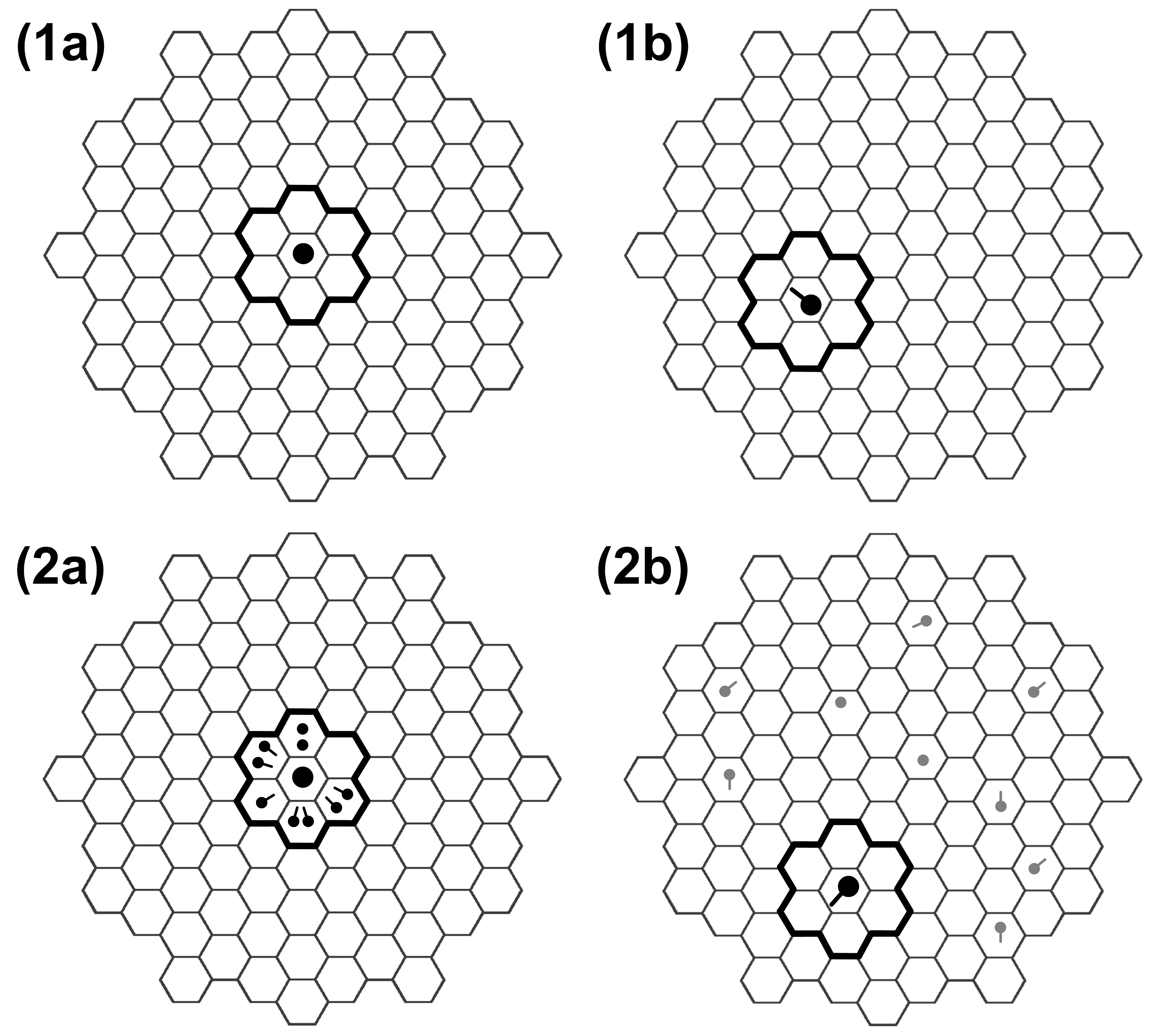
그림 5: 단일 대 공동 게임. 이 그림은 두 가지 다른 설정을 한 플레이어의 관점에서 벨 즈 외 에 비해 17 (1a/b) 단일 게임: 공동 선수 표시 되지 않습니다 및 육각 가상 운동장, (2a/b) 공동 게임에서 찾을 수 없습니다: 그들은 다른 선수의 로컬 인식 반경 내 체재로 공동 선수 볼 수 있습니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

그림 6: 서버와 클라이언트 구성. 10 ~ 12 (고객 C1 부터 C12) 해야 될의 근처에 배열 (노트북과 연결할) 서버 컴퓨터. 파티션 표시할 각 참가자의 워크스테이션 (두꺼운 선으로 표시)를 사용 하 여 가상 환경 밖에 서 사람들과 영상 통신을 금지 합니다. 대신 무선랜 LAN 케이블의 사용 더 적은 대기 시간 및 데이터 처리량을 더 신뢰할 수 있는 것이 좋습니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

그림 7: 콘텐츠 설정. 참가자 간의 통신 (감각, 시각, 청각) 격 벽 및 귀마개의 사용 제한 됩니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

그림 8: 서버에서 그래픽 인터페이스. 연결 된 각 클라이언트에 대 한 IP 및 기타 데이터 (예: 이동, 위치, 각 플레이어에 게 지급 하는 금액의 수)를 표시 하는 선이 있다. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

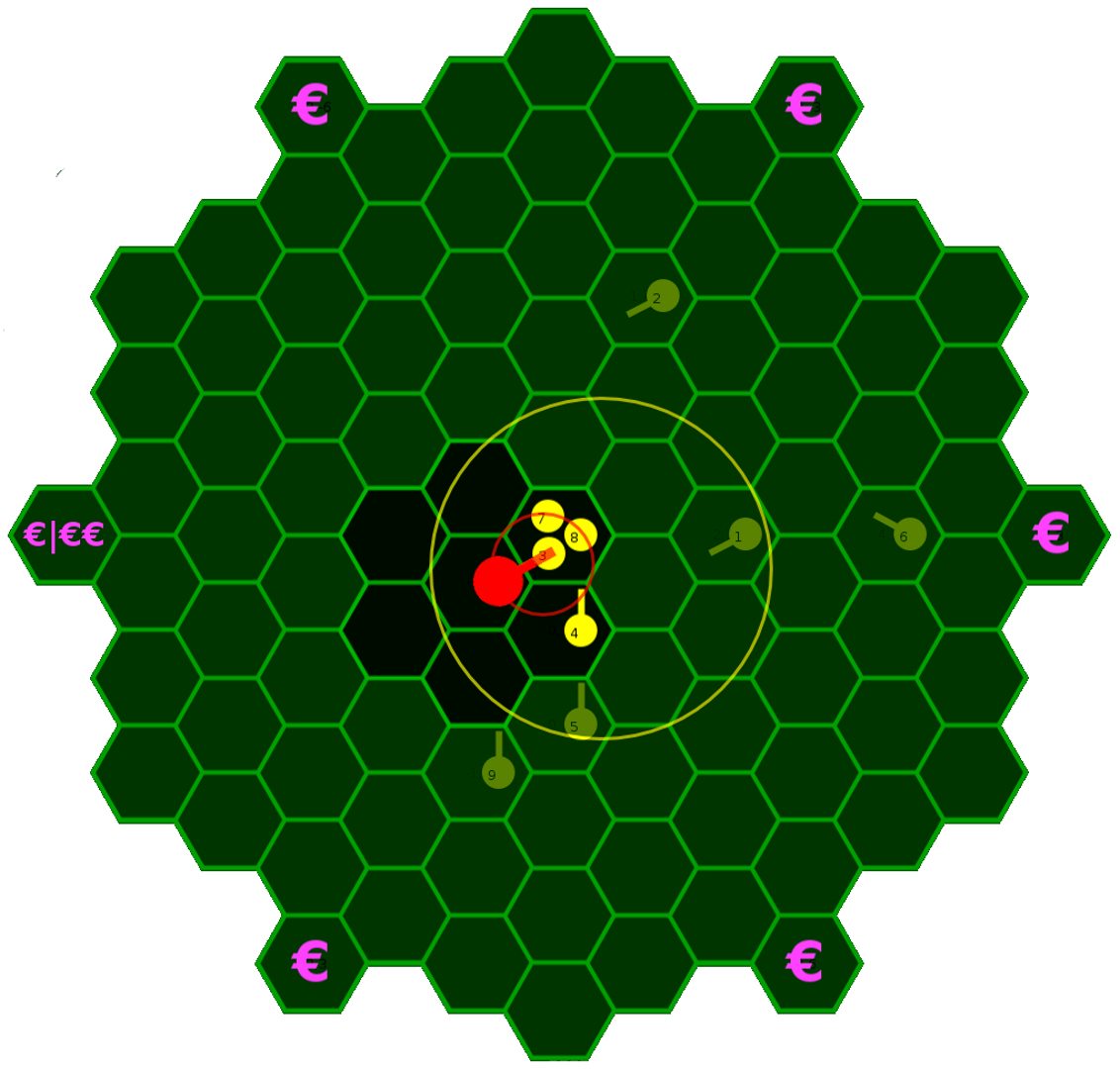
그림 9: 성공적인 리더십. 왼쪽된 측면에 스크린샷은 통화 목표에 접근 한 정보 플레이어 필드 ( 그림 4참조), 성공적으로 그/그녀의 목표 필드에 다른 5 명의 선수를 선도. 오른쪽에 받지 않은 선수의 공동 선수의 시력을 잃었다. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

그림 10: 게임 시간 (그룹 44) 이상의 공간 분산의 심층 분석. 비해 높은 보상 €€ 목표-필드 (정보 1, 2 정보)의 위치에 대 한 통보 했다 선수와 8 받지 않은 선수 ( 전체 그룹 (그룹 의미), 시간이 지남에 따라 그룹 회원 간의 거리를 의미 받지 않은). 게임의 끝으로 한 받지 않은 선수 했다 그룹을 잃 었 하 고 € 목표-필드 (고립 된 선수)에 도착 했다. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

비디오 1: 받지 않은 선수 (그룹 44)의 관점에서 집단 움직임의 예. 이 비디오를 보려면 여기 클릭 하십시오 (다운로드 오른쪽 클릭.)

비디오 2: 비디오 1 같은 게임에서 두 정보 선수의 관점에서 집단 운동의 예 (그룹 44) . 이 비디오를 보려면 여기 클릭 하십시오 (다운로드 오른쪽 클릭.)
| gnr | 시간 | pid | s1 | s2 | ||
| ... | ||||||
| 5 | 14시 56분: 42, 281 | 5 | 2 | 2 | ||
| 5 | 14시 56분: 42, 500 | 2 | 3 | 5 | ||
| ... | ||||||
| 5 | 14시 56분: 44 일 593 | 0 | 3 | 6 | NNug = 2 | not_moved |
| 5 | 14시 56분: 44, 578 | 3 | 2 | 2 | ||
| 5 | 14시 56분: 44, 796 | 7 | 3 | 3 | ||
| 5 | 14시 56분: 45, 125 | 6 | -5 | -3 | ||
| 5 | 14시 56분: 46, 109 | 1 | 2 | 2 | ||
| 5 | 14시 56분: 46, 281 | 5 | 2 | 2 | not_moved | |
| 5 | 14시 56분: 46, 765 | 3 | 3 | 3 | ||
| 5 | 14시 56분: 47, 531 | 4 | 2 | 3 | not_moved | |
| 5 | 14시 56분: 48, 187 | 9 | 3 | 6 | NNug = 2 | not_moved |
| 5 | 14시 56분: 48, 625 | 2 | 3 | 6 | NNug = 2 | not_moved |
| 5 | 14시 56분: 48, 625 | 8 | 3 | 2 | not_moved | |
| 5 | 14시 56분: 48, 640 | 6 | -6 | -3 | NNug = 1 | |
| 5 | 14시 56분: 48, 640 | 4 | 3 | 4 | ||
| 5 | 14시 56분: 48, 953 | 7 | 3 | 3 | not_moved | |
| 5 | 14시 56분: 49, 390 | 5 | 3 | 3 | ||
| ... | ||||||
| 5 | 14시 56분: 52, 671 | 4 | 3 | 4 | not_moved | |
| 5 | 14시 56분: 52, 687 | 6 | -6 | -3 | NNug = 1 | not_moved |
표 1: 데이터 형식. 각 참가자의 움직임과 관련 된 타임 스탬프 육각 가상 운동장에 계층적/혼합 모델링의 사용을 설정 하는 별도 행에 6 각형 좌표로 기록 됩니다. 표 10 플레이어 (그룹 44)의 구성 된 그룹에 의해 생성 된 데이터 집합의 일부입니다.
| 그룹 44 (예) | ∑ 이동 | 순위 1st 이동 | 대기 시간 | 지불금 | 최종 거리 | 거리 €€ 필드 | 시간 | 필드의 % 탐험 |
| (a) 개별 수준 변수 | ||||||||
| 플레이어 ID01 | 6 | 1 | 1,73 | 18 | 0,67 | 0 | - | - |
| 선수 ID1 | 6 | 10 | 3,74 | 9 | 0,67 | 0 | - | - |
| 선수 번호 2 | 6 | 3 | 2,19 | 9 | 0,67 | 0 | - | - |
| 플레이어가 ID3 | 7 | 9 | 2,68 | 9 | 0,67 | 0 | - | - |
| 선수 ID4 | 6 | 7 | 4,38 | 9 | 0,67 | 0 | - | - |
| 선수 ID5 | 9 | 8 | 3,98 | 9 | 0,67 | 0 | - | - |
| 선수 ID6 | 12 | 5 | 2,70 | 1 | 6,00 | 6 | - | - |
| 플레이어 ID71 | 6 | 6 | 4,96 | 18 | 0,67 | 0 | - | - |
| 플레이어 ID8 | 9 | 4 | 4,03 | 9 | 0,67 | 0 | - | - |
| 플레이어 ID9 | 6 | 2 | 2,45 | 9 | 0,67 | 0 | - | - |
| ((b)) 그룹 수준 변수 | ||||||||
| 받지 않은 | 7,63 | 5,88 | 3,27 | 8 | 따라서 | 단위별 | - | - |
| 정보 | 6,00 | 4,00 | 3,35 | 18 | 0,67 | 0, 00 | - | - |
| 전체 그룹 | 다 | - | 3,28 | 10 | 1, 20 | 무거운 | 39,02 | 27,84 |
표 2: 그룹 운동 동작 분석 (그룹 44)의 결과 상세한. 결과 개별 수준에 대 한 (a) 및 (b) 그룹 수준에 대 한 나열 됩니다. 그룹 수준에서 의미는 받지 않은 대다수 (8 인용), 정보 소수 (2 명의 선수), 및 전체 그룹 (10 선수)에 대 한 계산 했다. 1 Id 0 및 7 플레이어 필드-높은 보상 €€ 목표;의 위치에 대 한 정보를 무작위로 선택 했다 ∑ 움직임 움직임;의 총 수 = 1세인트이동 의 순위 순위 1세인트 이동 관계에 다른 플레이어;의 = 대기 시간 = 초 두 단계 사이의 대기 시간 평균 운동.; 지불금 €; 게임의 완료 후 개별 보상 = 최종 거리 모든 나머지 선수에 게 각 선수의 평균 거리 게임; 끝 = €€ 필드 거리 €€ 목표-필드 거리 게임; 끝 = 시간 = 초에 있는 게임의 총 기간.; 필드의 % 탐험 = 합계 필드 (97 육각형) 그룹에 의해 탐험의 비율. 참조 하십시오 그림 10 게임 시간, 비디오 1 , 비디오 2 그룹의 집단 움직임에 대 한과 표 1 운동 데이터의 발췌를 통해 그룹의 분산의 심층 분석에 대 한.
토론
인간의 집단 행동을 조사 하는 연구 패러다임으로 멀티 클라이언트 가상 환경을 사용 하 여 하나의 근본적인 질문 결과 실제 시나리오에 적용 여부입니다. 즉, 않습니다 방법론 접근 결과가 충분 한 생태 또는 외부 타당성을 가진? 가상 운동장에 아바타로 인간 참가자를 대표 하 고 그들 을 통해 마우스 클릭을 이동 시키는 사회적 신호를 감소 시킨다. 또한, 조사는 환경 어포던스와 인간의 그룹 조정 및 리더십 행동에 영향을 미칠 수 있는 인간 중 어떤 암묵적인 행동 신호 전송 경험 수 최소 통신 유지 (예: 구조, 경쟁, 피난) 더와 어느 정도 이러한 동작은 영향을 받습니다. 프로토콜 및 테스트 절차에 두 사전 테스트 단계에 엄격한 부착을 확인 하 고는,이 reductionist 접근 내부 유효성을 보장 합니다. "진짜" 그룹 및 군중 역학 결과의 전송 수 있도록, 실험 설치 및 테스트 단계 수정할 수 있습니다 점차적으로 더 복잡 한 (예를 들어, 단순한 전송/독서 운동 넘어 추가 통신이 동작, 의미상 다양 한 실제 시나리오에 포함 된 개별 특성에 정보를 추가 등) 에서 설명 하 고 있는 화면 지침 읽을 참가자는 게임을 시작 하기 전에.
외부 타당성의 문제를 해결 하려면 [처음 표준화 표준화, 2 차원 6 각형 좌표 (사전 테스트) 성과 혼동 요인의 감소 때문에 선수의 움직임을 선택] 육각 운동장 다양 한 수 있습니다. 자유 운동 선택 2 차원 그리드 선수 더 지속적이 고 복잡 한 운동 데이터를 만드는 것이 가능 예를 들어 만든 의해 화합-또는 언리얼-엔진, 3 차원 환경 생태/외부 타당성을 높이기 또한 수 있습니다. 그러나, 각 단계 lessoning 움직임의 제한으로 문제가 발생 합니다. 자유의 운동 시뮬레이션 시나리오에서는 혼동 요인 (컴퓨터 경험 등예를 들어, 개인 간 차이, 3 차원 게임에 공간 오리엔테이션을 가진 친밀)의 영향의 상승 복잡성 증가, 편견된 결과로 이어질 수 있는 내부 타당성을 줄일 합니다.
벌집 프로토콜에서 설명 하는 방법의 장점은 그것 컴퓨터 시뮬레이션 모델을 함께 고 실험적으로 컴퓨터 시뮬레이션에서 발견 하는 집단 패턴 또한 인간의 그룹 행동을 위해 보유 하는 경우를 테스트 하는 패러다임으로 사용 될 수 있습니다. 그들은 충분히 느꼈다 고 인간적으로 그들의 아바타와 여부 그들은 인식 하는 인간 배우로 그들의 공동 선수 수 있었다 나타내는 그러한 테스트의 외부 타당성을 강화 하려면 참가자 테스트 후 단계 질문에 요청 한다. 프로토콜 지정 인간 화신의이 감각을 강화 하기 위해 서로 옆에 워크스테이션에 (비록 프로토콜 매개 변수 감각 청각 또는 시각적 커뮤니케이션 배제) 앉아 공동 선수의 실제 존재를 합니다.
합계에서는, 프로토콜의 테스트 전, 테스트 및 테스트 후 단계에 설명 된 벌집 접근 방식으로 적용 하는 방법을 제공 하는 등 그룹 조정, 리더십, 집단 현상의 기본적인 메커니즘을 조사 하는 새로운 패러다임 및 내부 그룹 differentiatio명. 그들은 충분히 엄격한 테스트 전 및 테스트 단계에서 참가자 서로와 통신 하지 않는 보장 하는 경우에 특히 방법의 가장 중요 한 제한 채용에 의해 인간의 오류에 대 한 취약성입니다.
공개
저자는 공개 없다.
감사의 말
이 연구는 독일 우수 이니셔티브에 의해 투자 되었다 (기관 전략: https://www.uni-goettingen.de/en/32632.html). 우리는 그녀의 영어 교정에 대 한 마가렛 네 프 하인리히 감사합니다.
자료
| Name | Company | Catalog Number | Comments |
| Notebooks | |||
| Partition walls between work stations | |||
| Earplugs | |||
| Equipment for LAN installation |
참고문헌
- Boos, M., Pritz, J., Lange, S., Belz, M. Leadership in Moving Human Groups. PLoS Computational Biology. 10 (4), e1003541(2014).
- Moussaid, M., Garnier, S., Theraulaz, G., Helbing, D. Collective information processing and pattern formation in swarms, flocks, and crowds. Topics in Cognitive Science. 1 (3), 469-497 (2009).
- Sumpter, D. J. T. Collective Animal Behavior. , Princeton University Press. Princeton. (2010).
- Krause, J., et al. Fish shoal composition: mechanisms and constraints. Proceedings - Royal Society. Biological Sciences. 267 (1456), 2011-2017 (2000).
- Camazine, S., et al. Self-Organization in Biological Systems. , Princeton University Press. Princeton. (2003).
- King, A. J., Sueur, C., Huchard, E., Cowlishaw, G. A rule-of-thumb based on social affiliation explains collective movements in desert baboons. Animal Behavior. 82 (6), 1337-1345 (2011).
- Fischer, J., Zinner, D. Communication and cognition in primate group movement. International Journal of Primatology. 32 (6), 1279-1295 (2011).
- Couzin, I. D., Krause, J. Self-organization and collective behavior in vertebrates. Advances in the Study of Behavior. 32, 1-75 (2003).
- Katz, Y., Tunstrøm, K., Ioannou, C. C., Huepe, C., Couzin, I. D. Inferring the structure and dynamics of interactions in schooling fish. Proceedings of the National Academy of Sciences of the United States of America. 108 (46), 18720-18725 (2011).
- Guy, S. J., Curtis, S., Lin, M. C., Manocha, D. Least-effort trajectories lead to emergent crowd behaviors. Physical Review E: Statistical, Nonlinear, and Soft Matter Physics. 85 (1), 016110(2012).
- Shao, W., Terzopoulos, D. Autonomous pedestrians. Proceedings of the 2005 ACM SIGGRAPH/Eurographics Symposium on Computer Animation. , (2005).
- Reynolds, C. W. Flocks, herds and schools: A distributed behavioral model. Seminal Graphics. , ACM. 273-282 (1987).
- Pelechano, N., Allbeck, J. M., Badler, N. I. Controlling individual agents in high-density crowd simulation. Proceedings of the 2007 ACM SIGGRAPH/Eurographics Symposium on Computer Animation. , 99-108 (2007).
- Helbing, D., Molnár, P., Farkas, I. J., Bolay, K. Self-organizing pedestrian movement. Environment and Planning B: Planning and Design. 28 (3), 361-383 (2001).
- Dyer, J. R. G., Johansson, A., Helbing, D., Couzin, I. D., Krause, J. Leadership, consensus decision making and collective behavior in humans. Philosophical Transactions - Royal Society. Biological Sciences. 364 (1518), 781-789 (2009).
- Moussaid, M., Schinazi, V. R., Kapadia, M., Thrash, T. Virtual Sensing and Virtual Reality: How New Technologies can Boost Research on Crowd Dynamics. Frontiers in Robotics and AI. , (2018).
- Belz, M., Pyritz, L. W., Boos, M. Spontaneous flocking in human groups. Behavioral Processes. 92, 6-14 (2013).
- Boos, M., Franiel, X., Belz, M. Competition in human groups - Impact on group cohesion, perceived stress and outcome satisfaction. Behavioral Processes. 120, 64-68 (2015).
- Boos, M., Li, W., Pritz, J. Patterns of Group Movement on a Virtual Playfield: Empirical and Simulation Approaches. Social Network Analysis: Interdisciplinary Approaches and Case Studies. Fu, X., Luo, J. -D., Boos, M. , 197-223 (2017).
- Dyer, J. R. G., et al. Consensus decision making in human crowds. Animal Behavior. 75 (2), 461-470 (2008).
- Faria, J. J., Dyer, J. R. G., Tosh, C. R., Krause, J. Leadership and social information use in human crowds. Animal Behavior. 79 (4), 895-901 (2010).
- Conradt, L. Models in animal collective decision-making: information uncertainty and conflicting preferences. Interface Focus. 2 (2), 226-240 (2011).
- Couzin, I. D., Krause, J., Franks, N. R., Levin, S. A. Effective leadership and decision-making in animal groups on the move. Nature. 433, 513-516 (2005).
재인쇄 및 허가
JoVE'article의 텍스트 или 그림을 다시 사용하시려면 허가 살펴보기
허가 살펴보기더 많은 기사 탐색
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. 판권 소유