
Method Article
액체 액적 영향의 높은 처리량 분석
요약
이 프로토콜을 사용하면 액체 낙하 충격의 실험적인 고속 이미지를 효율적으로 수집하고 해당 데이터를 일괄 분석할 수 있습니다. 이러한 프로세스를 간소화하기 위해 이 메서드는 장치를 교정 및 설정하고, 적절한 데이터 구조를 생성하고, 이미지 분석 스크립트를 배포하는 방법을 설명합니다.
초록
표면에 대한 액체 낙하 영향에 대한 실험 연구는 재료 특성, 충격 조건 및 실험 구성과 같은 가능한 실험 파라미터의 넓은 범위로 인해 종종 그 범위에서 제한됩니다. 이를 더해, 낙하 충격은 종종 데이터가 풍부한 고속 사진을 사용하여 연구되므로 상세하고 시기 빠른 방식으로 많은 실험을 분석하기가 어렵습니다. 이 방법의 목적은 체계적인 접근 방식을 사용하여 고속 사진으로 액적 충격을 효율적으로 연구할 수 있도록 하는 것입니다. 장비는 맞춤 이미지 처리 코드로 정확하게 처리될 수 있는 비디오를 제작하기 위해 정렬및 보정됩니다. 또한 여기에 설명된 파일 구조 설정 및 워크플로는 연구원이 실험실에 있는 동안 수행되는 데이터 처리의 효율성과 명확한 구성을 보장합니다. 이미지 처리 방법은 비디오의 각 프레임에 충격액의 디지털화된 윤곽을 추출하고, 필요에 따라 추가 분석을 위해 처리된 데이터가 저장된다. 이 프로토콜은 물방울이 중력 하에서 수직으로 방출되고 그림자를 사용하여 점액이 비추는 드롭과 함께 옆에서 보는 카메라에 의해 충격이 기록된다고 가정합니다. 고속 이벤트의 이미지 분석과 관련된 많은 유사한 실험은 사용되는 프로토콜 및 장비를 약간 조정하여 해결할 수 있습니다.
서문
표면에 액체 낙하 영향은 근본적인 현상1의 이해와 산업 공정2모두에 큰 관심입니다. 낙하 영향은 100년이상 3 동안 연구되었습니다, 그러나 많은 양상은 아직 완전히 조사될 것입니다. 고속 사진은 풍부한 접근 가능한 데이터를 제공하여 분석 측정을 좋은 시간 해상도로 수행할 수 있기 때문에 낙하 충격연구 4에 거의 보편적으로 사용됩니다. 단단한 표면에 낙하 충격의 결과5,6,7 범위는 간단한 증착에서 튀는8에이르기까지 . 초소수성 표면에 미치는 영향은 드롭 바운스9,10,11,12를포함하여 특히 흥미로운 결과를 생성할 수 있기 때문에 종종 연구됩니다. 여기서 설명된 프로토콜은 마이크로스케일 패터닝을 통해 폴리머 표면에 대한 물방울 영향을 연구하기 위해 개발되었으며, 특히 패턴이 낙하 충격 결과에 미치는 영향13,14.
낙하 충격 실험의 결과는 가능한 변수의 넓은 범위에 의해 영향을 받을 수 있습니다. 낙하의 크기와 속도는 밀도, 표면 장력 및 점도와 같은 유체 특성과 함께 다를 수 있습니다. 드롭은 뉴턴15 또는 비 뉴턴16일수 있습니다. 액체7,17,고체18및 탄성19 표면을 포함하여 다양한 충격 표면이 연구되었습니다. 다양한 가능한 실험 구성은 Rein et al.17에의해 이전에 설명되었다. 물방울은 다른 모양을 취할 수 있습니다. 진동, 회전 또는 표면에 비스듬히 충돌할 수 있습니다. 표면 질감 및 온도와 같은 환경 요인이 다를 수 있습니다. 이러한 모든 매개 변수는 액적 의 필드가 매우 광범위하게 영향을 미칩니다.
이 광범위한 변수로 인해 동적 액체 습윤 현상에 대한 연구는 종종 상대적으로 구체적이거나 좁은 주제에 초점을 맞추도록 제한됩니다. 이러한 많은 조사는 수동으로 처리된 고속 비디오10,20,21,22에서얻은 적당한 수의 실험(예를 들어, 50-200 데이터 포인트)을 사용한다. 이러한 연구의 폭은 합리적인 시간 내에 연구원이 얻을 수 있는 데이터의 양에 의해 제한됩니다. 비디오의 수동 처리는 종종 이미지 분석 소프트웨어의 사용으로 달성 종종 충격 방울의 직경을 측정과 같은 반복적 인 작업을 수행해야합니다 (피지23 및 추적기24는 인기있는 선택입니다). 드롭 충격을 특성화하기 위한 가장 널리 사용되는 측정은 확산낙하25,26,27,28의직경이다.
이미지 처리가 개선되어 자동 컴퓨터 지원 방법이 데이터 수집 효율성을 개선하기 시작했습니다. 예를 들어, 펜던트 드롭방법(30)을 이용한접촉각(29)과 표면 장력의 자동 측정을 위한 이미지 분석 알고리즘을 사용할 수 있다. 분석용 으로 많은 개별 이미지로 구성된 영화를 제작하는 낙하 충격의 고속 촬영을 위해 훨씬 더 큰 효율성을 얻을 수 있으며, 실제로 일부 최근 연구는 실험 워크플로우가 명확하게 변경되지 는 않았지만 자동화 된 분석15,18을사용하기 시작했습니다. 낙하 충격 실험을 위한 실험 설계의 다른 개선사항은 섀도우그래프 기법31,32,33,34를통해 고속 카메라와 결합될 수 있는 시판되는 LED 광원의 발전으로부터 생겨났다.
이 문서에서는 낙하 충격 동영상을 캡처하고 분석하기 위한 표준화된 방법을 설명합니다. 주요 목표는 위에서 설명한 다양한 낙하 영향 연구에 일반적으로 유용해야 하는 대용량 데이터 집합을 효율적으로 수집할 수 있도록 하는 것입니다. 이 방법을 사용하여, 충격 적인 투하의 시간 해결, 디지털화된 윤곽은 하루에 ~100개의 실험에 대해 얻어질 수 있다. 해석은 액적 충격 파라미터(크기, 속도, 웨버 및 레이놀즈 수)와 최대 확산 지름을 자동으로 계산합니다. 이 프로토콜은 모든 기본 액적 파라미터(액체, 크기 및 충격 속도 포함), 기판 재료 또는 환경 조건에 직접 적용됩니다. 광범위한 실험 파라미터를 스캔하는 연구는 비교적 짧은 기간에 실시될 수 있다. 이 방법은 또한 여러 반복 실험으로 작은 범위의 변수를 포함하는 고해상도 연구를 장려합니다.
이 방법의 장점은 표준화된 실험과 명확한 데이터 구조 및 워크플로에 의해 제공됩니다. 실험 설정은 실험 직후 녹화된 비디오를 신속하게 처리하기 위해 사용자 지정 이미지 분석 코드(MATLAB에서 실행되는 보조 코딩 파일로 포함)로 전달될 수 있는 일관된 속성(공간 및 대비)이 있는 이미지를 생성합니다. 데이터 처리 및 수집의 통합은 데이터 수집의 전반적인 속도가 향상된 주된 이유입니다. 데이터 수집 세션이 끝나면 각 비디오가 처리되고 모든 관련 원시 데이터가 비디오 재처리 없이 추가 분석을 위해 저장됩니다. 더욱이, 사용자는 각 실험이 수행된 직후의 품질을 육안으로 검사하고 필요한 경우 실험을 반복할 수 있다. 초기 교정 단계는 실험 설정을 서로 다른 실험실 세션 간에 정밀도로 재현할 수 있도록 합니다.
이 방법을 구현하기 위해 사용자는 수평(side-on) 관점에서 표면을 이미지화하도록 배치된 고속 카메라에 액세스할 수 있다고 가정합니다. 이 배열의 회로도 표현은 카르테시안 축의 정의를 포함하여 그림 1에나와 있습니다. 시스템은 카메라와 샘플을 3차원(X, Y 및 Z)으로 정확하게 배치할 수 있어야 합니다. 액적을 비추기 위해 섀도우그래프 방법이 구현되고 카메라의 광학 경로를 따라 배치됩니다. 시스템은 X 및 Z 방향으로 이동하여 광학 경로를 카메라와 정렬할 수 있는 고품질 직류(DC) LED 조명 시스템(시준 응축기 렌즈 포함)을 사용해야 합니다. 또한 사용자가 특정바늘(35)에연결될 때 원하는 부피의 개별 액적을 생성하도록 프로그래밍할 수 있는 주사기 펌프에 접근할 수 있다고 가정한다. 물방울은 중력에 속하므로 충격 속도가 표면 위의 바늘 위치에 의해 제어됩니다. 이 설정은 매우 일반적이지만, 재료 표는 대표적인 결과를 얻기 위해 사용되는 특정 장비를 나열하고 장비 선택에 의해 부과되는 몇 가지 잠재적 인 제한 사항을 나열합니다.

그림 1: 최소한의 실험 설정의 개략적 표현. 고속 카메라는 측면에서 샘플에 수직으로 영향을 미치는 이미지 방울에 배치됩니다. LED 광원은 그림자 를 위해 카메라의 가시선과 정렬됩니다. 바늘은 개별 액적 생산에 사용되며 카르테시안 축이 정의됩니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
방법 설명은 액체 방울이 떨어지고 충격을 받을 때 의 가장자리를 측정하는 데 중점을 두습니다. 이미지는 일반적으로 사용되는 측면 관점으로부터 가져옵니다. 두 대의 고속 카메라13,14를사용하여 측면 및 상향식 뷰모두에서 확산된 물방울을 조사할 수 있지만, 상향식 뷰는 불투명 한 재질의 경우 불가능하며 하향식 뷰는 정렬 합병증을 일으킵니다. 기본 워크플로우를 사용하여 표면에 영향을 미치는 작은(직경 2−3mm) 물체에 대한 연구를 개선할 수 있으며, 사소한 변경이 있는 더 크거나 작은 물체에 사용할 수 있습니다. 실험 설정 및 방법에 대한 개선 및 대안은 토론 섹션에서 더 자세히 고려됩니다.
프로토콜
1. 고속 카메라 설정
- 카메라의 고정 시야(FOV)를 설정하고 픽셀에서 mm으로 변환 계수를 계산합니다.
- 정렬 마커(예: 이미지 분석 코드가 제공된 4mm 측면 길이 마커)를 샘플 스테이지의 가운데 위치에 배치하여 카메라를 향하도록 합니다. 사각형 마커가 FOV 내에 맞설 수 있도록 카메라의 배율을 조정합니다. 마커가 포커스가 있는지 확인하고 이미지를 캡처합니다.
참고: 이미지 분석 코드에서는 이미지된 액적이 전체 FOV의 1% 이상을 커버해야 하며, 그렇지 않으면 노이즈로 분류됩니다. 마찬가지로, 물방울은 FOV의 40 % 이상을 차지해서는 안되며, 그렇지 않으면 실패한 이미지 처리 이벤트로 식별됩니다. - 렌즈의 배율을 잠그고 일괄 실험 중에 이 변함이 없는 상태로 유지되도록 합니다.
- MATLAB 내의 아이콘을 클릭하여 액적 영향 분석 소프트웨어에 대한 그래픽 사용자 인터페이스(GUI)를 로드합니다.
- 이미지 분석 코드를 실행합니다. GUI에서 보정 카메라 버튼을 클릭하고 1.1.1 단계에서 얻은 이미지를 선택합니다. 보정 사각형의 크기를 mm로 입력하고 확인을클릭합니다.
- 보정 사각형이 그 안에 있는 유일한 오브젝트가 될 때까지 화면에 표시된 사각형을 이동합니다. 확인을 클릭하면 소프트웨어가 자동으로 변환 계수를 계산합니다. 자동 교정에 실패하면 소프트웨어 가이드를 따라 수동 교정을 수행하십시오.
- 정렬 마커(예: 이미지 분석 코드가 제공된 4mm 측면 길이 마커)를 샘플 스테이지의 가운데 위치에 배치하여 카메라를 향하도록 합니다. 사각형 마커가 FOV 내에 맞설 수 있도록 카메라의 배율을 조정합니다. 마커가 포커스가 있는지 확인하고 이미지를 캡처합니다.
- 실험 시스템을 정렬합니다.
- 개별 액적의 분배에 사용되는 액체를 준비합니다.
- 바늘 마운트를 사용자의 눈 높이 주위에 배치하여 적재가 용이합니다.
- 수동으로 튜브를 제거하여 주사기로 공기를 밀어 내면 유체를 제거합니다. 튜브가 꼬이지 않고 바늘이 안전하고 깨끗한지 확인하십시오. 바늘이 수직이되도록 바늘과 튜브를 고정하십시오.
참고 : 필요한 경우, 초음파 욕조에서 에탄올로 강철 바늘을 청소하십시오. - 조사 중인 유체(예: 물)로 주사기를 채우고 컴퓨터 제어 주사기 펌프에 부착합니다. 주사기 펌프를 사용하여 바늘을 제거하십시오 (디스펜스 버튼을 클릭하고 길게 누를 때) 유체에 거품이 없을 때까지.
- 개별 액적의 방출에 필요한 부피를 분배하도록 주사기 펌프를 설정합니다.
참고: 대표적인 결과의 경우, 평균 액적 직경은 0.5 mL/min의 디스펜스 속도와 11 μL의 디스펜싱 볼륨을 사용하여 2.6 mm였습니다. 펌핑 속도는 중력하에서 액적이 형성되고 방출될 정도로 충분히 느려야 하며, 시행착오를 통해 미세 조정할 수 있습니다. 액적의 부피는14로 근사화될 수 있습니다.
여기서 D는 바늘 직경이고, γLG는 액체-기체 표면 장력이고, θ는 유체 밀도이다.
- 샘플(예를 들어, 플랫 폴리메틸실록산[PDMS])을 바늘 아래에 놓고 주사기 펌프를 사용하여 단일 액적을 분배하여 정렬합니다. 액적이 관심 있는 샘플 영역에 떨어지고 퍼지는지 확인하고 필요에 따라 샘플 위치를 변경하지 않는 지 확인합니다.
참고: 액적 정렬이 어려운 경우 바늘이 바늘 홀더에 수직으로 올바르게 장착되어 있고 구부러지지 않는지 확인하십시오. 이제 샘플이 X 및 Y 축을 기준으로 정렬되며 실험 중에 이동하면 안 됩니다. - 카메라를 정렬하고 초점을 맞춥니다.
- 샘플에 한 방울을 분배합니다. 표면이 카메라의 FOV 중앙에 평평해질 때까지 샘플 홀더의 수직 위치(Z)를 조정합니다.
- 샘플의 액적이 FOV의 중앙에 정렬되도록 카메라의 수평 위치(X)를 조정합니다. LED의 수직(Z) 및 수평(X) 위치를 조정하여 카메라의 위치와 일치하도록 하여 빛의 중심이 FOV의 중앙에 나타나도록 합니다. 액적에 초점을 맞추도록 액적에서 카메라의 거리(Y)를 조정합니다.
참고: 이제 시스템이 정렬되고 보정됩니다. 모든 장비의 위치 지정이 변경되지 않은 경우 프로토콜을 일시 중지하고 재조정 없이 다시 시작할 수 있습니다. 다양한 두께의 샘플에 대해 수직 방향(Z)의 샘플 정렬을 반복해야 합니다.
- 카메라의 녹화 조건을 설정합니다.
- 카메라의 프레임 속도를 기록중인 개체의 최적 값으로 설정합니다.
참고:31을 사용하여 카메라의 최적 프레임속도(fps)를예측할 수 있습니다.
여기서 N은 샘플링 속도(개체가 일반적으로 길이 눈금을 덮을 때 캡처된 이미지 수) V는 액적의 속도이고 j는 이미징 길이 눈금(예: FOV)입니다. - 충분한 조명을 유지하면서 카메라의 노출 시간을 가능한 한 작은 값으로 설정합니다. 이 단계에서 충분한 조명을 유지하면서 렌즈 조리개를 사용 가능한 가장 작은 설정으로 조정합니다.
참고: 최소 노출시간(te)에대한 추정치는31로 지정됩니다.
여기서 k는 길이 축척(예: 픽셀 크기)이고 PMAG은 기본 배율이고 V는 액적의 속도입니다. - 카메라의 트리거를 설정합니다. 종료 모드 트리거를 사용하여 카메라가 레코딩을 버퍼링한 다음 트리거(예: 사용자 마우스 클릭)에서 중지합니다.
참고: 자동 트리거 시스템을 사용하여 이 프로세스를 자동화할 수 있습니다.
- 카메라의 프레임 속도를 기록중인 개체의 최적 값으로 설정합니다.
- 개별 액적의 분배에 사용되는 액체를 준비합니다.
2. 실험 수행
- 컴퓨터 파일 시스템을 준비하여 실험 일괄 처리합니다.
- 현재 실험 일괄 처리에 대한 동영상을 저장할 폴더를 만듭니다. 이 폴더를 카메라 제조업체 가이드 다음에 카메라 소프트웨어의 저장 위치로 설정합니다. 캡처한 이미지의 파일 형식이 .tif인지 확인합니다.
- 이미지 분석 GUI에서 경로 설정 버튼을 클릭하고 2.1.1 단계에서와 동일한 폴더를 선택하여 소프트웨어가 새 비디오에 대해 이 폴더를 모니터링하도록 지시합니다.
- 실험 일괄 처리에 대한 폴더 구조를 만듭니다.
- 이미지 분석 GUI에서 폴더 만들기 단추를 클릭하고 1) 최소 액적 해제 높이, 2) 최대 릴리스 높이, 3) 각 실험 사이의 높이 단계 및 4) 각 높이에서 반복 실험 수를 입력합니다.
참고: 충격 속도는 V = (2gh)1/2로근사될 수 있으며, 여기서 g는 중력으로 인한 가속도이고 h는 낙하 해제 높이입니다. - 확인을 클릭하여 폴더 만들기 스크립트를 실행합니다.
참고: 이제 이 실험의 디렉터리에서 다양한 폴더가 만들어졌습니다. 이러한 폴더의 이름은 "height_xx"이며 xx는 액적 릴리스의 높이입니다. 이러한 각 폴더에서 빈 폴더는 각 반복 실험에 대한 데이터를 저장할 준비가 되었습니다. 연구할 각각의 새로운 표면 또는 유체에 대해 섹션 2.1을 반복합니다.
- 이미지 분석 GUI에서 폴더 만들기 단추를 클릭하고 1) 최소 액적 해제 높이, 2) 최대 릴리스 높이, 3) 각 실험 사이의 높이 단계 및 4) 각 높이에서 반복 실험 수를 입력합니다.
- 실험에 필요한 대로 표면을 준비합니다. 건조하고 단단한 표면에 충격을 주려면 적절한 표준 프로토콜로 표면을 청소하고 완전히 건조시도록 하십시오.
- 액적 충격 이벤트를 기록합니다.
- 샘플을 샘플 단계에 놓습니다. 필요한 경우 표면을 회전하여 카메라에 맞춥습니다. 바늘을 원하는 액적 방출 높이로 이동합니다.
- 카메라의 시야가 막히지 않았는지 확인한 다음 카메라 소프트웨어를 사용하여 나중에 사용할 이미지(나중에 사용할 이미지)를 캡처하고 저장합니다. 카메라가 녹화 및 버퍼링되도록 비디오 녹화를 시작합니다(예: 카메라의 내부 메모리 채우기).
- 주사기 펌프를 사용하여 샘플에 단일 방울을 분배합니다(단계 1.2.1.4). 충격 이벤트가 완료되면 레코딩을 트리거합니다. 시료 홀더에서 표면을 제거하고 적절하게 건조시.
- 추가 분석을 위해 비디오 파일을 준비합니다.
- 비디오를 자작합니다.
- 적합한 소프트웨어(예: 고속 카메라 소프트웨어)를 사용하여 비디오를 스캔하여 액적이 FOV 내에 완전히 있는 첫 번째 프레임을 찾습니다. 비디오의 시작을 이 프레임으로 자그합니다.
- 충격 실험 중에 관심 현상을 포착하는 데 필요한 프레임 수에 따라 앞으로 이동합니다(예: 250프레임은 일반적으로 10,000fps로 캡처된 충격에 충분합니다). 비디오의 끝을 이 프레임으로 자그합니다.
- 비디오를 .avi 파일로 저장하고 현재 실험 배치, 릴리스 높이 및 반복 번호에 대한 해당 폴더에 저장 경로를 설정합니다.
- 이미지 분석 GUI에서 파일 정렬 단추를 클릭합니다. 2.3.2단계에서 촬영한 배경 이미지가 이제 화면에 표시되는지 시각적으로 확인합니다. 이렇게 하면 최신 저장된 .avi 파일과 .tif 파일을 찾아 동시에 촬영했다고 가정하여 동일한 폴더로 이동합니다.
- 추적 실행 버튼을 클릭하여 이미지 처리를 시작합니다. 결과 이미지 처리가 오버레이된 비디오가 표시됩니다. 비디오를 보면서 이미지 처리가 제대로 작동하는지 질적으로 확인합니다.
참고: 이미지 처리가 완료되면 이미지 처리 코드에 액적 이미지가 최대 확산될 수 있습니다. 카메라를 제대로 보정하지 않으면 이미지 처리가 잘못 될 수 있습니다. 필요한 경우 이미지 처리가 성공할 때까지 보정을 반복합니다. - 2.3 및 2.4 섹션을 반복하여 이 배치에서 모든 실험을 수행하는 데 필요한 바늘의 높이를 조정합니다.
참고: 각 실험 폴더에는 이제 일련의 .mat 파일이 포함됩니다. 이 파일은 이미지 처리 소프트웨어에 의해 추출및 각 프레임에 대한 드롭 윤곽선, 영역, 경계 상자 및 둘레를 포함하여 향후 분석을 위해 저장된 데이터를 포함합니다.
- 비디오를 자작합니다.
3. 원시 데이터 분석
- 이미지 분석 GUI에서 프로세스 데이터 버튼을 클릭하여 원시 처리된 데이터에서 주요 변수계산을 시작합니다. 실험 세션 이후에 이 메시지가 실행되면 처리할 실험 일괄 처리가 포함된 폴더를 선택하라는 메시지가 표시됩니다.
- 1) 기록 프레임 속도(fps), 2) 유체 밀도(kg/m3),3) 유체 표면 장력(N/m) 및 4) 유체 점도(Pa·s)의 4개 값을 입력합니다.
참고: 소프트웨어는 기본적으로 9,300fps의 프레임 속도와 주변 조건에서 물의 유체 특성을 기본값으로 설정합니다. 입력된 값은 웨버 및 레이놀즈 숫자를 계산하는 데 사용됩니다. - videofolders.mat 파일에 데이터를 저장하고 .csv 파일로 내보냅니다.
참고: 코드는 단일 실험에 대해 파일 prop_data.mat를 로드하고, 액적 중심의 위치를 계산하고, 충격 프레임(액적 중심 감속 전의 마지막 프레임으로 정의됨)을 찾고, 액적의 수평 스프레드가 최대화되는 프레임을 찾습니다. 저장된 출력 데이터는 충격 속도(시간 함수로서 액적 중심의 수직 위치에1st 다항식 맞춤 사용), 액적의 동등한 직경(물방울 체적을 찾기 위해 Z 축에 대한 회전 대칭을 가정하여 계산된 다음 해당 볼륨36을가진 구의 지름을 찾음), 최대 확산시 액적 직경 및 웨버 수입니다.
결과
알려진 참조 사각형을 사용하여 이미지에서 밀리미터단위로 측정된 거리를 변환합니다. 이 사각형은 카메라의 FOV및 초점에 방해가 되지 않아야합니다(그림 2A). 기준 제곱의 잘못된초점(그림 2B)은계산된 변수(예: 속도)에서 체계적인 오차를 생성합니다. 변환 계수를 계산할 때 오류를 줄이려면 참조 사각형이 FOV를 최대한 많이 다루어야 합니다. 사각형의 측면 길이는 카메라의 해상도 제한을 감안할 때 가능한 한 높은 정밀도로 알려져야 합니다.
액적 식별 소프트웨어는 그림 2C와같이 카메라에 수평으로 표시되는 샘플의 표면에 의존합니다. 구부러지거나 제대로 해결되지 않은 서피스(그림2D)는이미지 처리 오류를 생성합니다. 이 소프트웨어는 표면 가장자리가 배경과 선명한 대비를 생성하는 한 수평이 아닌 평평한 표면에 영향을 미치는 방울을 분석하는 데 사용할 수 있습니다.
전체 액적 스프레드가 소프트웨어에 의해 추적되도록 하기 위해 액적은 샘플의 중앙에 착륙해야합니다(그림 2E). 시스템이 잘못 정렬되면 액적이 중심 위치에서 표류할 수 있으며 초점이 맞지 않을 수있습니다(그림 2F). 액적의 초점이 벗어난 경우 계산된 크기가 올바르지 않습니다. 이 효과는 종종 높이의 함수로 충격 위치에 드리프트를 생성하는 표면에서 수직으로 바늘을 이동하는 데 사용되는 시스템의 가난한 정렬에 의해 발생합니다. 사용자가 병렬 및 수직 정렬을 보장하기 위해 광학 브레드 보드 시스템 (또는 이와 유사한)을 구현하는 것이 좋습니다.
충격 액적의 이미지 가장자리가 선명하게 표시되도록 하려면 사용 가능한 광원에서 가능한 가장 짧은 노출 시간을 사용해야 하는 것이좋습니다(그림 2G). 카메라를 기준으로 조명 경로를 잘못 정렬하면 카메라 조리개 및 노출 시간과 같은 다른 설정이 조정되는 경우가 많습니다. 이렇게 하면 이동 액적에 퍼지 엣지가 생성됩니다(그림2H)

그림 2: 시스템의 잘못된 보정과 관련된 일반적인 문제. (A)교정 사각형이 올바르게 정렬되고 초점을 맞춥니다. (B)초점이 벗어난 보정 사각형으로 잘못된 교정 계수를 생성합니다. (C)샘플 표면은 수평이며 샘플 표면과 배경 사이에 높은 대비를 제공합니다. (D)샘플이 카메라에 비스듬히 되어 반사 표면을 생성합니다. (E)점적물은 초점 평면에서 샘플의 중앙에 착륙합니다. (F)물방울이 중앙에서 떨어져 떨어지고 사용되는 넓은 조리개로 인해 초점이 닿지 않습니다. (G)짧은 노출 시간(10μs)으로 인해 날카로운 가장자리로 물방울이 이미지화됩니다. (H)최적이 아닌 조명과 더 긴 노출 시간(99μs)은 모션 블러를 생성합니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
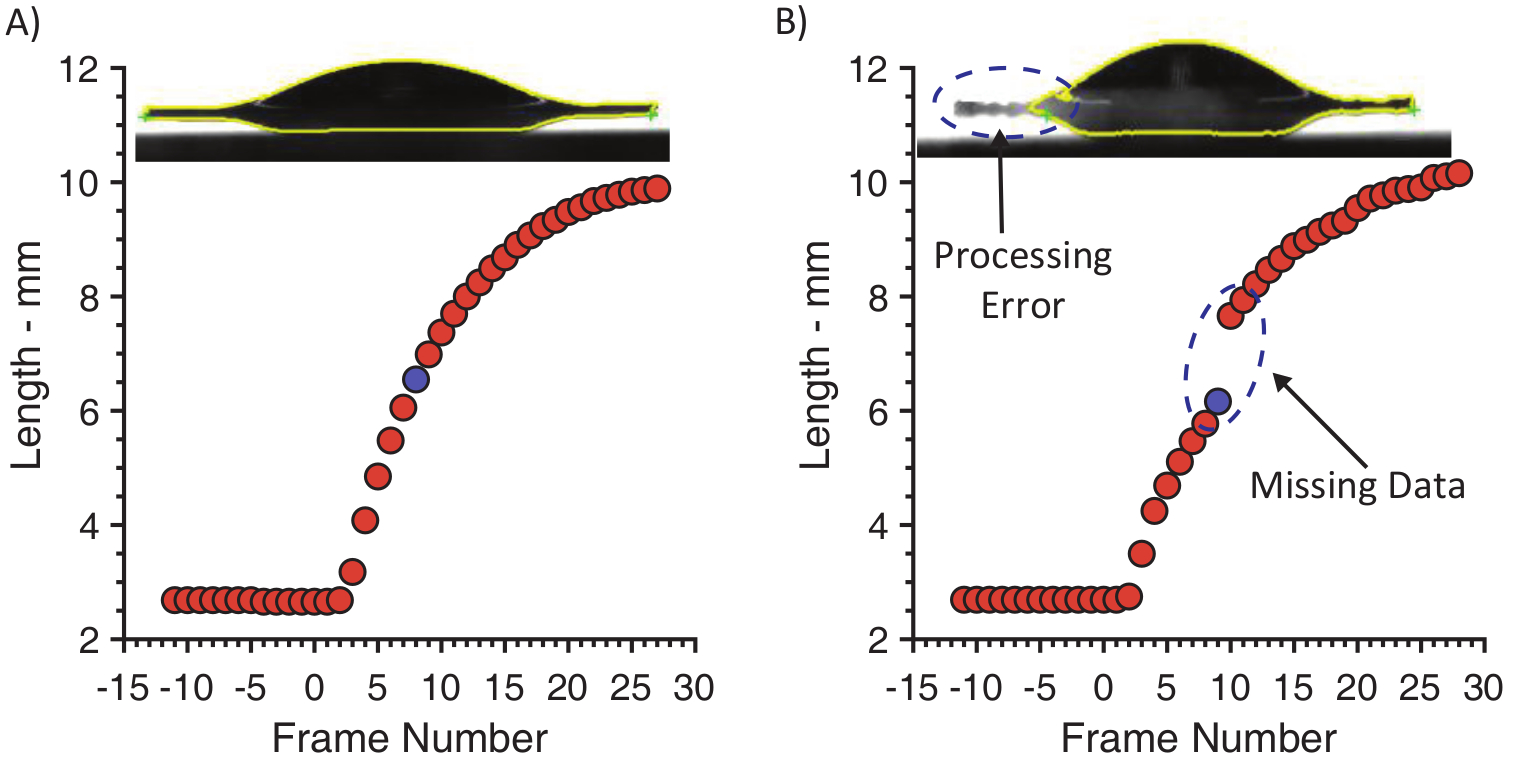
샘플의 잘못된 조명과 정렬은 기록된 이미지에서 눈부심과 그림자를 생성할 수 있습니다. 이미지 처리 단계에서 아티팩트를 생성하는 경우가 많으며, 이로 인해 수집된 양질의 데이터 포인트의 수를 줄일 수 있습니다. 조명 경로가 수평으로 정렬되지 않은 경우 투명 유체의 눈부심이 일반적입니다. 소프트웨어는 비디오 이미지에서 액적의 전체 윤곽을 추적 할 수 있어야합니다(그림 3A). 추적이 완료되지 않으면 확산 액적의 길이와 같은 측정값이 올바르지않습니다(그림 3B).

그림 3: 비디오 프레임 번호의 함수로서 충격 액적의 길이(충격 프레임 = 0). 각 파란색 데이터 포인트는 인세트 이미지에 해당합니다. (A)올바른 조명을 사용하면 소프트웨어가 물방울(노란색 선)의 전체 윤곽선을 추적할 수 있습니다. 접촉점(녹색 십자가)이 올바르게 식별되고, 확산 액적의 기록된 길이는 프레임 번호의 매끄러운 기능입니다. (B)조명이 불량하여 액체에 눈부심이 생기고 물방울의 왼쪽 가장자리가 올바르게 추적되지 않습니다. 확산 된 물방울의 기록 된 길이는 데이터의 부정확성을 보여줍니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
보조 코딩 파일. 이 파일을 다운로드하려면 여기를 클릭하십시오.
토론
이 방법은 시스템의 여러 부분의 위치와 정렬 제어에 따라 달라집니다. 이 방법을 사용하기 위한 최소 요구 사항은 샘플, 카메라 및 조명 LED를 정렬하는 기능입니다. 광원을 카메라 센서에 잘못 정렬하는 것은 일반적인 문제입니다. 라이트 패스가 카메라로 들어오면 원치 않는 아티팩트가 생성되어 이미지 처리를 방해합니다. 사용자는 LED와 카메라 센서 사이의 거의 완벽한 수평 조명 경로를 달성하는 것을 목표로해야 합니다. 정확한 포지셔닝 컨트롤(예: 마이크로미터 단계)은 이 방법의 측면에 유용합니다.
렌즈의 선택은 실험에 필요한 FOV에 따라 달라집니다. 일반적으로 사용 가능한 가변 줌 렌즈는 시스템을 즉석에서 조정할 수 있지만 종종 다른 문제로 어려움을 겪습니다. 가변 줌 렌즈를 사용하는 경우 사용자는 실험 배치 중에 총 배율이 변경되지 않는지 확인해야 합니다(시스템이 보정되면 프로토콜 섹션 1). 고정 배율 렌즈를 사용하면 이 문제를 해결할 수 있습니다. 배율을 고정하면 카메라를 샘플에 따라 이동하여 두 가지 유형의 렌즈 의 초점 평면의 위치를 변경할 수 있습니다.
시스템을 정렬하는 동안 조사할 샘플과 동일한 두께의 빈 샘플을 사용하는 것이 좋습니다. 이렇게 하면 관심 샘플이 실험 전에 손상되거나 젖지 않도록 합니다. 실험 배치 중에 샘플 두께가 변경되면 시스템을 Z 방향으로 다시 정렬해야 합니다.
필요하지는 않지만, 컴퓨터 제어 바늘 위치 시스템의 추가는 크게 방법의 속도와 해상도를 증가시킬 수있다. 일반적으로 사용 가능한 스테퍼 모터 레일 시스템은 마이크로 미터 정확도로 바늘의 위치를 허용하는 데 사용할 수 있습니다. 바늘의 디지털 제어는 또한 사용자가 더 높은 정밀도로 표면에 대한 높이를 제로 할 수 있습니다. 이 추가 단계를 통해 새 랩 세션을 시작할 때 실험 설정을 정확하게 복원할 수 있습니다.
사용자가 고속 카메라에 대한 제어 소프트웨어를 사용하는 방법을 배우는 것이 좋습니다. 대부분의 최신 시스템은 이미지 트리거를 사용할 수 있습니다. 이 방법은 카메라의 내부 고속 전자 장치를 사용하여 FOV 영역의 변경 사항을 모니터링합니다. 신중하게 보정된 경우 액적이 표면에 영향을 줄 때 자동으로 카메라를 트리거하는 데 사용할 수 있습니다. 이 방법을 사용하면 비디오를 녹화한 후 자르기 위해 비디오의 올바른 프레임을 찾는 데 소요되는 시간이 줄어듭니다.
이 방법은 방향에 의존하는 현상을 분석하기 위해 하나 이상의 카메라를 사용하도록 확장할 수 있습니다. 여러 대의 카메라를 사용하는 경우 사용자가 하드웨어 트리거링 및 동기화를 사용하는 것이 좋습니다. 대부분의 고속 카메라 시스템은 여러 대의 카메라를 동일한 프레임 속도로 녹화할 수 있습니다. 공유 하드웨어 트리거(예: 트랜지스터-트랜지스터 로직 [TTL] 펄스)를 사용하여 사용자는 동일한 실험의 동시 보기를 기록할 수 있습니다. 이 메서드는 두 개의 다양한 배율로 동일한 이벤트를 기록하도록 추가로 조정할 수 있습니다.
이 프로토콜은 표면에 영향을 미치는 물방울을 위한 고속 비디오 데이터를 신속하게 수집하고 처리할 수 있도록 하는 것을 목표로 합니다. 입증된 바와 같이, 다양한 충격 조건에서 다재다능합니다. 해석 코드가 비교적 약간 변경되면 추가 데이터(예: 시간 의존성 및 스플래시 프로파일)를 제공하거나 다른 영향 형상을 연구하기 위해 확장할 수 있습니다. 추가 개선 사항에는 관심 있는 주요 프레임을 포함하도록 비디오를 자동으로 자르는 것이 포함될 수 있습니다. 이 단계는 바늘 높이의 자동화와 함께 배치 비디오를 완전 자동 방식으로 수집할 수 있게 해주며, 사용자가 충격 사이에 샘플을 변경하도록 요구합니다.
공개
저자는 공개 할 것이 없다.
감사의 말
이 작품은 뉴질랜드 왕립 학회가 관리하는 마스덴 기금에 의해 지원되었습니다.
자료
| Name | Company | Catalog Number | Comments |
| 24 gauge blunt tip needle | Sigma Aldrich | CAD7930 | |
| 4 x 4 mm alignment square (chrome on glass) | Made in-house using lithography. | ||
| 5 ml syringe | ~ | ~ | Should be compatible with syringe pump. Leur lock connectors join the syringe to the needle. |
| Aspheric condenser lens | Thor Labs | ACL5040U | Determines beam width, which should cover the field of view. |
| Cat 5e ethernet cable | ~ | ~ | A fast data connection between the high-speed camera and PC, suitable for Photron cameras. |
| Droplet impact analysis software | ~ | ~ | Provided as Supplementary Coding File. Outline data are stored in .mat files. Calculations are output as .csv files. |
| Front surface high-power LED | Luminus | CBT-40-G-C21-JE201 LED | Separate power supply should be DC to avoid flickering. |
| High-speed camera | Photron | Photron SA5 | Typically operated at ~10,000 fps for drop impacts. |
| High-speed camera software | Photron | Photron Fastcam Viewer | Protocol assumes camera has an end trigger; that movie files can be saved in .avi format, and screenshots in .tif format, to a designated folder; and that movies can be cropped. |
| Linear translation stages | Thor Labs | DTS25/M | Used to position the LED, sample and camera. |
| Macro F-mount camera lens | Nikon | Nikkor 105mm f/2.8 Lens | Choice of lens determines field of view. |
| PC running Matlab 2018b | Matlab | ~ | PC processing power and RAM can effect protocol speed and hence efficiency. |
| Polydimethylsiloxane (PDMS) | Dow | SYLGARD™ 184 Silicone Elastomer | Substrates made using a 10:1 (monomer:cross-linker) ratio. |
| PTFE tubing | ~ | ~ | |
| Syringe pump | Pump Systems Inc | NE-1000 | Protocol assumes this can be set to dispense a specific volume. |
참고문헌
- Josserand, C., Thoroddsen, S. T. Drop impact on a solid surface. Annual Review of Fluid Mechanics. 48, 365-391 (2016).
- Van Dam, D. B., Le Clerc, C. Experimental study of the impact of an ink-jet printed droplet on a solid substrate. Physics of Fluids. 16, 3403-3414 (2004).
- Worthington, A. M. . A study of splashes. , (1908).
- Thoroddsen, S., Etoh, T., Takehara, K. High-speed imaging of drops and bubbles. Annual Review of Fluid Mechanics. 40, 257-285 (2008).
- Chandra, S., Avedisian, C. On the collision of a droplet with a solid surface. Proceedings of the Royal Society of London. Series A: Mathematical and Physical Sciences. 32 (1884), 13-41 (1991).
- Marengo, M., Antonini, C., Roisman, I. V., Tropea, C. Drop collisions with simple and complex surfaces. Current Opinion in Colloid and Interface Science. 16, 292-302 (2011).
- Yarin, A. L. Drop impact dynamics: Splashing, spreading, receding, bouncing. Annual Review of Fluid Mechanics. 38 (1), 159-192 (2006).
- Thoroddsen, S. T. The making of a splash. Journal of Fluid Mechanics. 690, 1-4 (2012).
- Bartolo, D., et al. Bouncing or sticky droplets: Impalement transitions on superhydrophobic micropatterned surfaces. Europhysics Letters. 74 (2), 299-305 (2006).
- Richard, D., Quéré, D. Bouncing water drops. Europhysics Letters. 50 (6), 769-775 (2000).
- Bird, J. C., Dhiman, R., Kwon, H. M., Varanasi, K. K. Reducing the contact time of a bouncing drop. Nature. 503, 385-388 (2013).
- Khojasteh, D., Kazerooni, M., Salarian, S., Kamali, R. Droplet impact on superhydrophobic surfaces: A review of recent developments. Journal of Industrial and Engineering Chemistry. 42, 1-14 (2016).
- Robson, S., Willmott, G. R. Asymmetries in the spread of drops impacting on hydrophobic micropillar arrays. Soft Matter. 12 (21), 4853-4865 (2016).
- Broom, M. . Imaging and Analysis of Water Drop Impacts on Microstructure Designs. , (2019).
- Lee, J. B., Derome, D., Guyer, R., Carmeliet, J. Modeling the maximum spreading of liquid droplets impacting wetting and nonwetting surfaces. Langmuir. 32 (5), 1299-1308 (2016).
- Laan, N., de Bruin, K. G., Bartolo, D., Josserand, C., Bonn, D. Maximum diameter of impacting liquid droplets. Physical Review Applied. 2 (4), 044018 (2014).
- Rein, M. Phenomena of liquid drop impact on solid and liquid surfaces. Fluid Dynamics Research. 12 (2), 61-93 (1993).
- Wang, M. J., Lin, F. H., Hung, Y. L., Lin, S. Y. Dynamic behaviors of droplet impact and spreading: Water on five different substrates. Langmuir. 25 (12), 6772-6780 (2009).
- Weisensee, P. B., Tian, J., Miljkovic, N., King, W. P. Water droplet impact on elastic superhydrophobic surfaces. Scientific Reports. 6, 30328 (2016).
- Xu, L., Zhang, W. W., Nagel, S. R. Drop splashing on a dry smooth surface. Physical Review Letters. 94 (18), 184505 (2005).
- Clanet, C., Béguin, C., Richard, D., Quéré, D. Maximal deformation of an impacting drop. Journal of Fluid Mechanics. 517, 199-208 (2004).
- Collings, E., Markworth, A., McCoy, J., Saunders, J. Splat-quench solidification of freely falling liquid-metal drops by impact on a planar substrate. Journal of Materials Science. 25 (8), 3677-3682 (1990).
- Schindelin, J., et al. Fiji: An open-source platform for biological-image analysis. Nature Methods. 9 (7), 676-682 (2012).
- . Tracker Video Analysis and Modeling Tool for Physics Education (software) Available from: https://physlets.org/tracker (2019)
- Bennett, T., Poulikakos, D. Splat-quench solidification: Estimating the maximum spreading of a droplet impacting a solid surface. Journal of Materials Science. 28 (4), 963-970 (1993).
- Rioboo, R., Marengo, M., Tropea, C. Time evolution of liquid drop impact onto solid, dry surfaces. Experiments in Fluids. 33 (1), 112-124 (2002).
- Ukiwe, C., Kwok, D. Y. On the maximum spreading diameter of impacting droplets on well-prepared solid surfaces. Langmuir. 21 (2), 666-673 (2005).
- Wildeman, S., Visser, C. W., Sun, C., Lohse, D. On the spreading of impacting drops. Journal of Fluid Mechanics. 805, 636-655 (2016).
- Biolè, D., Bertola, V. A goniometric mask to measure contact angles from digital images of liquid drops. Colloids and Surfaces A: Physicochemical and Engineering Aspects. 467, 149-156 (2015).
- Daerr, A., Mogne, A. Pendent_Drop: An ImageJ plugin to measure the surface tension from an image of a pendent drop. Journal of Open Research Software. 4 (1), 3 (2016).
- Versluis, M. High-speed imaging in fluids. Experiments in Fluids. 54 (2), 1458 (2013).
- Rydblom, S., Thӧrnberg, B. Liquid water content and droplet sizing shadowgraph measuring system for wind turbine icing detection. IEEE Sensors Journal. 16 (8), 2714-2725 (2015).
- Castrejón-García, R., Castrejón-Pita, J., Martin, G., Hutchings, I. The shadowgraph imaging technique and its modern application to fluid jets and drops. Revista Mexicana de Física. 57 (3), 266-275 (2011).
- Castrejón-Pita, J. R., Castrejón-García, R., Hutchings, I. M., Klapp, J., Medina, A., Cros, A., Vargas, C. High speed shadowgraphy for the study of liquid drops. Fluid Dynamics in Physics, Engineering and Environmental Applications. , 121-137 (2013).
- Tripp, G. K., Good, K. L., Motta, M. J., Kass, P. H., Murphy, C. J. The effect of needle gauge, needle type, and needle orientation on the volume of a drop. Veterinary ophthalmology. 19 (1), 38-42 (2016).
- Hugli, H., Gonzalez, J. J. Drop volume measurements by vision. Machine Vision Applications in Industrial Inspection VIII. 3966, 60-67 (2000).
재인쇄 및 허가
JoVE'article의 텍스트 или 그림을 다시 사용하시려면 허가 살펴보기
허가 살펴보기더 많은 기사 탐색
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. 판권 소유