
A Practical Guide to Phage- and Robotics-Assisted Near-Continuous Evolution(파지 및 로보틱스 지원 거의 연속 진화에 대한 실용 가이드)
요약
파지 및 로보틱스 지원 근연속 진화(PRANCE)는 빠르고 강력한 단백질 진화를 위한 기술입니다. 로봇 공학은 실험의 병렬화, 실시간 모니터링 및 피드백 제어를 가능하게 합니다.
초록
로봇 가속 진화 기술은 피드백 제어를 사용하여 진화의 신뢰성과 속도를 향상시켜 단백질 및 유기체 진화 실험의 결과를 개선합니다. 이 기사에서는 PRANCE(Phage- and Robotics-assisted Near-continuous Evolution)를 구현하는 데 필요한 하드웨어 및 소프트웨어 설정에 대한 가이드를 제공합니다. PRANCE는 빠른 파지 기반 분자 진화와 수백 개의 독립적이고 피드백 제어 진화 실험을 동시에 실행할 수 있는 기능을 결합합니다. 이 백서에서는 액체 취급 기기, 플레이트 리더, 보조 펌프, 히터 및 3D 프린팅 용기를 포함한 PRANCE의 하드웨어 요구 사항 및 설정에 대해 설명합니다. Python 기반 오픈 소스 소프트웨어와 호환되도록 액체 처리 로봇을 구성하는 방법을 설명합니다. 마지막으로, 기능을 실행하고 시스템이 다중화 진화를 수행할 준비가 되었는지 검증하는 새로 구성된 PRANCE 시스템으로 수행할 수 있는 처음 두 가지 실험에 대한 제안을 제공합니다. 이 가이드는 로봇 가속 진화 수행과 관련된 상당한 장비 설정을 탐색하기 위한 핸드북 역할을 하기 위한 것입니다.
서문
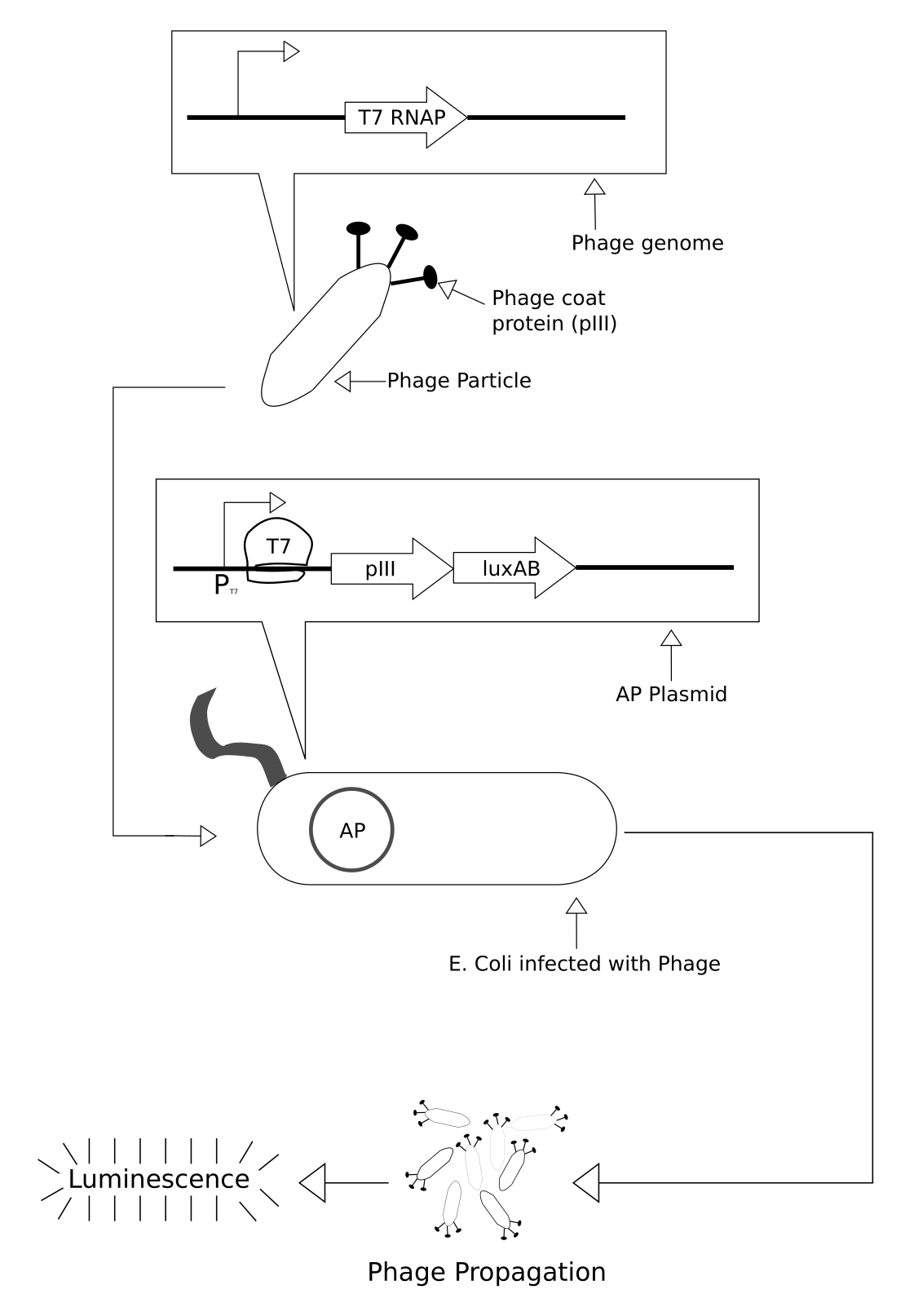
PRANCE는 두 가지 강력한 유도 진화 기술의 조합입니다. 첫 번째는 PACE1로, 유전자 다양화 및 선택을 M13 박테리오파지의 빠른 수명 주기에 결합하는 분자 기술로, 액체 파지 배양에서 빠른 진화 라운드가 지속적으로 발생할 수 있도록 합니다. 이 선택은 진화하는 단백질의 기능을 pIII, 파지 번식에 필요한 M13의 꼬리 코트 단백질의 발현에 결합하는 플라스미드 인코딩 유전자 회로를 사용하여 주도되며, 이는 그림 1에 설명되어 있습니다. 실험 수준에서, 액체 파지 배양액의 지속적인 희석은 연속적인 선택을 가능하게 합니다. 따라서 선택 엄격성은 유전자 회로 수준뿐만 아니라 파지 배양 희석 속도를 제어하여 실험 수준에서도 조절될 수 있습니다. 따라서 PACE는 pIII 발현을 유도하기 위해 대장균 박테리아에서 원하는 활성을 감지할 수 있는 분자 센서가 있는 모든 생체 분자 엔지니어링 과제에 적용할 수 있습니다. 응용 분야에는 단백질-단백질 결합 2,3,4, 단백질-DNA 결합5, 단백질 용해도6 및 수많은 특정 효소 기능7의 진화가 포함됩니다. 두 번째는 로보틱스 가속 진화 8,9로, 피드백 컨트롤러를 사용하여 지향 진화의 두 가지 일반적인 실패 모드, 즉 환경이 너무 엄격할 때 발생하는 멸종과 환경이 너무 관대할 때 발생하는 진화 부족을 제거합니다. PANCE(Phage-assisted Non-continuous Evolution)7,10에서 수행된 파지의 연속 패시징과 달리, 로봇 가속 "거의 연속적인" 진화는 중간 로그 단계에서 배양을 유지하는 신속한 피펫팅을 포함하여 개체군이 감염 및 전파의 지속적인 주기를 경험할 수 있도록 합니다. 이 두 가지 기술을 함께 사용하면 Phage 및 Robotics-assisted Near-continuous Evolution8의 약자인 PRANCE라고 하며, 이를 통해 강력하고 다중화되며 빠른 연속 진화를 가능하게 합니다. PRANCE는 중합효소, tRNA 및 아미노-아실 tRNA 합성효소를 진화시키고 이러한 진화 과정에서 피드백 제어를 수행하여 속도와 신뢰성을 향상시키는 데 사용되었습니다8.
액체 취급 로봇에서 박테리오파지를 사용할 수 있도록 하는 PRANCE의 하드웨어 및 소프트웨어 설정에 대한 몇 가지 세부 정보가 있습니다. 로봇 제조업체에서 제공하는 기본 소프트웨어를 사용하는 대신 Python 기반 오픈 소스 소프트웨어 패키지11을 사용하여 빠른 동시 실행을 가능하게 하여 반연속 바이오리액터를 중간 로그 단계로 유지할 수 있습니다. 갑판에 있는 여러 구성 요소를 정기적으로 자체 멸균하여 연구원의 휴직 시간을 며칠로 연장할 수 있으며, 이는 이러한 구성 요소를 표백하고 헹굴 수 있는 펌프의 자동 제어를 통해 달성됩니다. 파지 교차 오염은 포스 핏 팁을 사용하지 않는 액체 취급 로봇을 사용하고 액체 취급 설정을 신중하게 조정하여 제거할 수 있습니다.
프로토콜
1. 하드웨어 설정
주: 그림 2 를 참조하십시오view PRANCE 시스템의 하드웨어 구성 요소에 대한 설명과 그림 3 물리적으로 조립된 이러한 구성 요소의 사진.
- 액체 취급 기기, 플레이트 리더 및 보조 펌프를 포함한 PRANCE 시스템의 기본 하드웨어를 구합니다.
참고: 현재까지 모든 PRANCE 시스템은 8채널, 개별 주소 지정이 가능한 피펫팅 암, 단일 피스톤 96팁 피펫팅 암, 플레이트 이동용 로봇 그리퍼, 팁 멸균을 위한 통합 세척 스테이션, 흡광도 및 발광 측정이 가능한 통합 플레이트 리더가 장착된 중대형 액체 취급 기기에 구현되었습니다. - 액체 처리 로봇의 모델과 기능에 따라 가열 전략을 구성하십시오. 가열판 캐리어 또는 히터 매개 로봇 실내 온도 조절 장치를 사용하십시오.
- 팁을 재사용할 수 있도록 팁 세척 스테이션을 설치하십시오.
알림: 현재까지 PRANCE 시스템은 기성품 세척 스테이션을 사용했지만 원칙적으로 이 구성 요소는 저렴한 구성 요소로 쉽게 구성할 수 있습니다. - 37°C에서 작동하는 실시간 바이오리액터를 chemostat/turbidostat로 설정하여 로그 단계에서 유지되는 박테리아 배양의 소스를 확립합니다. 또는 근처 냉장고에서 37°C의 log-phase(0.25와 0.45 사이의 OD600 )에서 미리 성장한 최소 1L 부피의 log-phase 박테리아 배양을 체포합니다. 침전을 방지하기 위해 차갑거나 따뜻한 배양액을 셰이커 플레이트 또는 교반 플레이트를 사용하여 정기적으로 저어주어야 합니다.
- 필요한 소프트웨어 및 드라이버와의 로봇 통합을 위해 선호하는 펌프를 구성합니다. 펌프가 10-100mL 정도의 정의된 양의 액체를 전달할 수 있도록 소프트웨어를 구현합니다.
알림: 이 구현에 사용되는 펌프의 재료 표 와 제조업체의 web이러한 펌프를 작동하는 데 사용되는 소프트웨어 및 구성 방법에 대한 문서는 사이트를 참조하십시오. 이 원고에 설명된 PRANCE 설정에 사용된 펌프용 소프트웨어는 다음 GitHub 리포지토리에서 오픈 소스로 제공 https://github.com/dgretton/std-96-pace PRANCE에는 3개의 개별 채널(박테리아를 박테리아 저장소로 전달, 박테리아 저장소로 표백제 전달, 박테리아 저장소로 배출)을 펌핑할 수 있는 최소 3개의 펌프 매니폴드가 필요하며, 각 채널의 속도는 독립적으로 보정 및 제어됩니다. 과거에는 사람들이 어항 펌프와 수경 펌프 어레이를 사용했지만 원칙적으로 비단뱀 제어 가능한 연동 펌프를 사용할 수 있습니다. 필수 기능에는 로봇 그리퍼를 사용하여 플레이트를 리더 안팎으로 옮기고, 플레이트 리더 측정을 시작하고, 측정에 액세스하는 기능이 포함됩니다. - 보충 파일 1(https://drive.google.com/file/d/16ELcvfFPzBzNSto0xUrBe-shi23J9Na7/view?usp=share_link)에 있는 대로 최소한 박테리아 저장소/분배 매니폴드("와플")를 포함하여 PRANCE 시스템에 필요한 맞춤형 데크 구성 요소를 3D 인쇄합니다. 이러한 용기를 데크에 고정하고 표준 액체 처리 로봇 소프트웨어를 사용하여 위치를 보정합니다. 저장소를 펌프 어레이에 연결합니다.
알림: 로봇에 따라 다르므로 보정을 수행하는 방법에 대한 자세한 내용은 로봇 제조업체의 설명서를 참조하십시오. 수지 기반 3D 프린터가 가장 적합합니다. 사용된 프린터 유형의 예는 재료 목차에 나와 있습니다. 표준 투명 레진이 기본 프린터 설정과 함께 사용되었습니다. - 시스템에 지역 생물 안전 권장 사항과 호환되는 배수구를 장착하십시오.
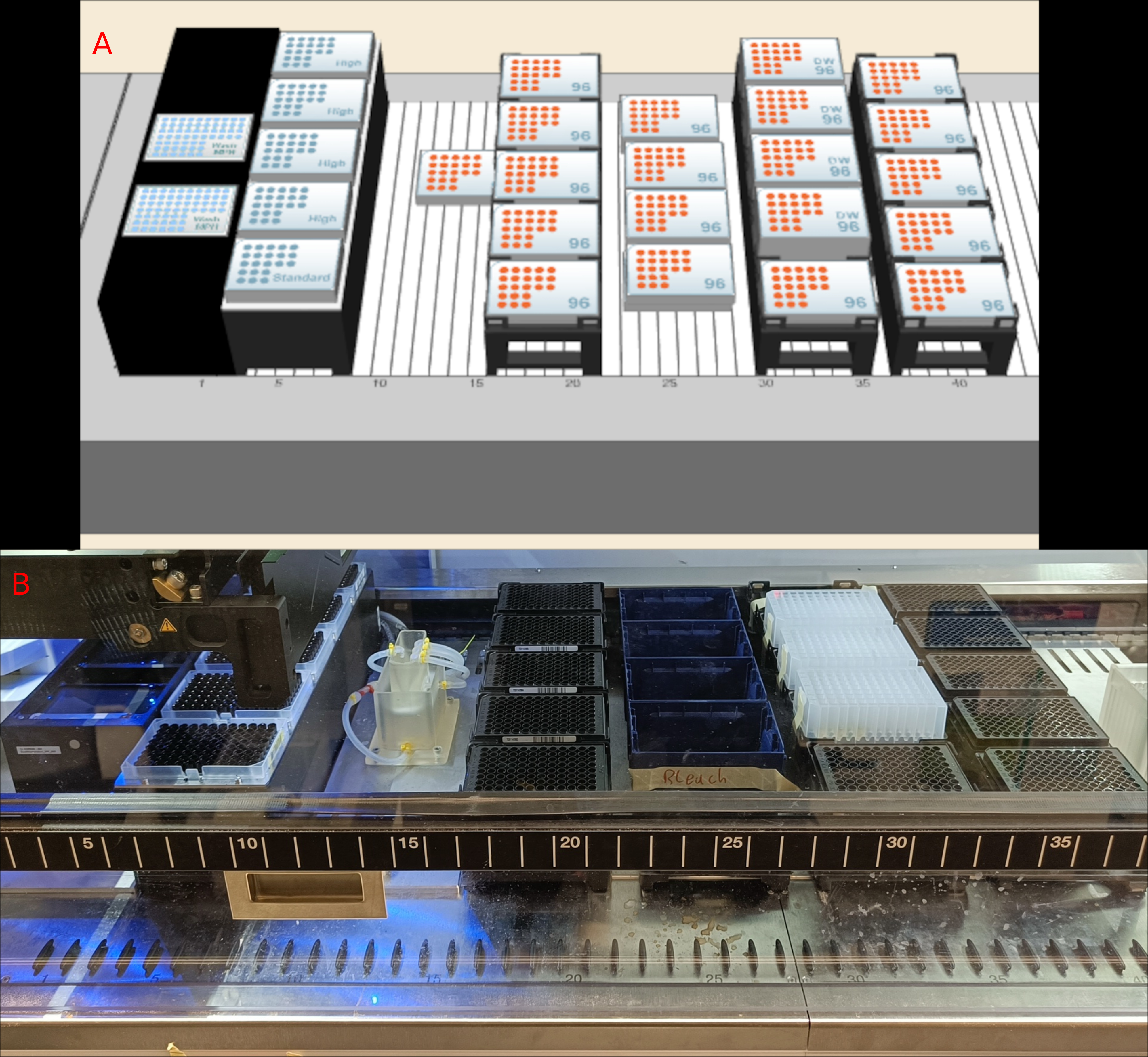
- 그림 4와 같이 Liquid Handling Robot의 데크에 실험기구를 놓습니다.
- 표준 실험실 개인 보호 장비(예: 실험실 가운, 장갑 및 보안경)의 사용을 포함한 표준 안전 절차를 따르십시오.
2. 소프트웨어 준비
- 오픈 소스 PyHamilton 리포지토리에서 사용할 수 있는 python11을 사용하여 액체 처리 로봇을 제어하는 데 사용되는 오픈 소스 소프트웨어를 설치합니다. https://github.com/dgretton/pyhamilton
- 그림 4와 같이 Liquid Handling 로봇 소프트웨어의 데크 레이아웃 파일을 수정하고 보정하여 로봇 데크의 실험기구 위치를 정확하게 반영합니다.
알림: 여기에 사용된 설정은 제공된 문서에 따라 액체 처리 로봇 제조업체에서 제공한 소프트웨어를 사용합니다. - 시뮬레이션 모드에서 PRANCE 로봇 메소드 프로그램을 실행합니다.
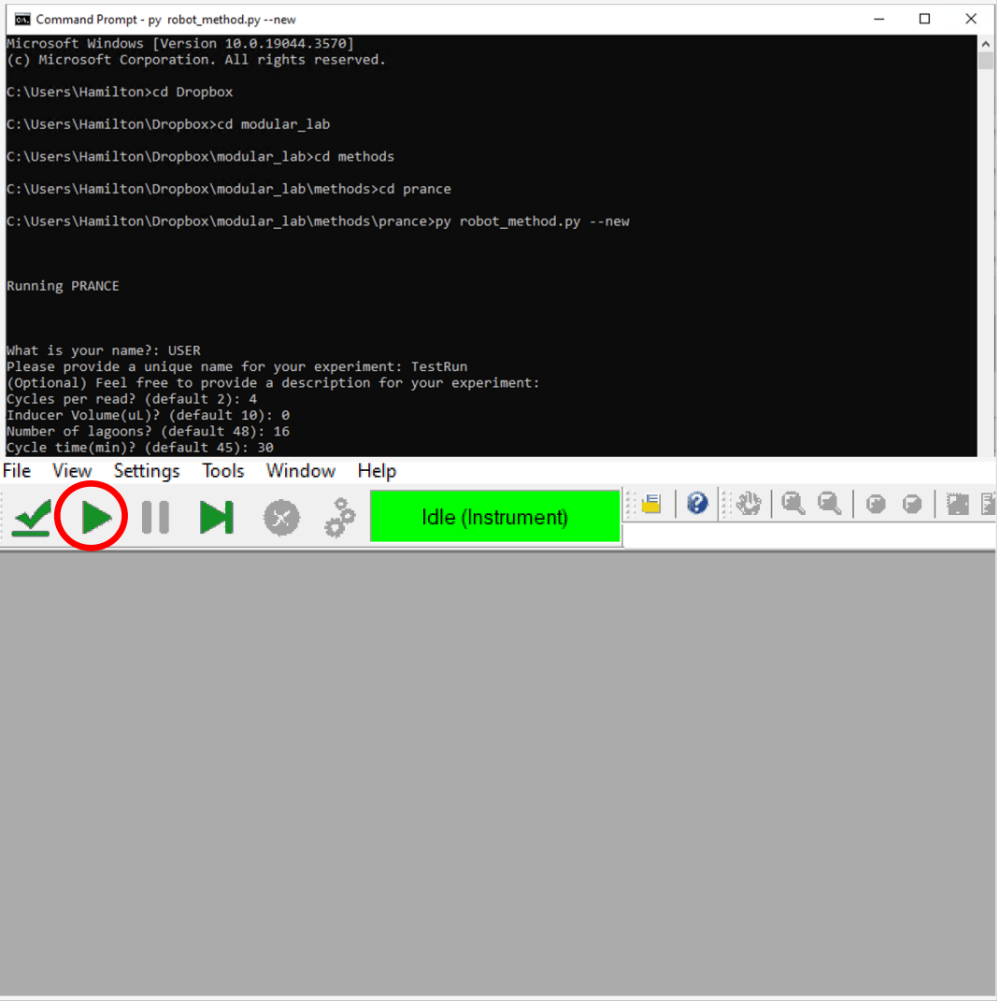
- 그림 5와 같이 다음 명령(Windows 운영 체제)을 사용하여 명령줄을 엽니다.
Windows 키 + R
cmd를 입력합니다. - 상위 디렉토리를 로봇 메소드 프로그램의 디렉토리로 변경합니다. 그림 5와 같이 올바른 경로로 아래와 같이 명령을 입력합니다.
CD c:\Robot_methods_directory\프랜스 - 그림 5와 같이 시뮬레이션 모드 플래그를 사용하여 Python으로 로봇 메서드 프로그램을 호출합니다.
py robot_method.py --simulate - 프로그램이 실행될 때 열리는 Robot Run Control 창의 왼쪽 상단에 있는 PLAY 단추를 선택합니다(그림 5).
참고: 계속 진행하기 전에 시뮬레이션에서 PRANCE 메서드가 오류 없이 실행될 수 있는지 확인합니다. 스크립트가 오류 없이 시뮬레이션 모드에서 작동할 수 있는지 여부는 시스템의 오류 처리가 호출되지 않고 기본 프로그램의 여러 루프를 완료하여 기본 프로그램 루프를 종료하기 때문에 분명해집니다.
- 그림 5와 같이 다음 명령(Windows 운영 체제)을 사용하여 명령줄을 엽니다.
- 시뮬레이션 모드를 비활성화한 상태에서 PRANCE 로봇 방법 프로그램을 실행합니다.
- 해당 디렉터리에서 명령줄을 엽니다(그림 5).
Windows 키 + R
cmd를 입력합니다.
CD c:\Robot_methods_directory\프랜스 - 플래그 없이 Python을 사용하여 로봇 메서드 프로그램을 호출합니다.
py robot_method.py - 프로그램이 실행될 때 열리는 로봇 실행 제어 창의 왼쪽 상단에 있는 PLAY 버튼을 선택합니다.
- PyHamilton이 계측기를 제어하고 초기화할 수 있는지 확인합니다.
- 해당 디렉터리에서 명령줄을 엽니다(그림 5).
- 실시간 데이터 동기화를 설정합니다.
참고: 현재까지 PRANCE 시스템은 사용자가 원격 파일 공유 소프트웨어 또는 원격 데스크톱을 통해 로그 파일 및 실시간 플레이트 리더 측정 그래프를 모니터링할 수 있는 네트워크 컴퓨터를 사용했습니다. - 자동 업데이트를 끕니다.
3. 실행 전 준비
- 계획된 실행에 필요한 모든 배양에 대해 로그 단계 박테리아 배양 소스를 사용할 수 있고 침전을 방지하기 위해 활발하게 교반되고 있는지 확인합니다. 활성 화학요법/탁도(turbidostat) 또는 성장이 억제된 냉장 사전 성장 배양균을 사용하십시오.
- 프로그램 주기당 96웰 석호의 각 웰로 펌핑할 박테리아 배양액의 부피(범위 0-500μL)에 대한 세부 정보로 컨트롤러 매니페스트 파일을 업데이트합니다. 이를 통해 석호 희석률을 정밀하게 제어할 수 있습니다. 이는 그림 6에서 볼 수 있습니다.
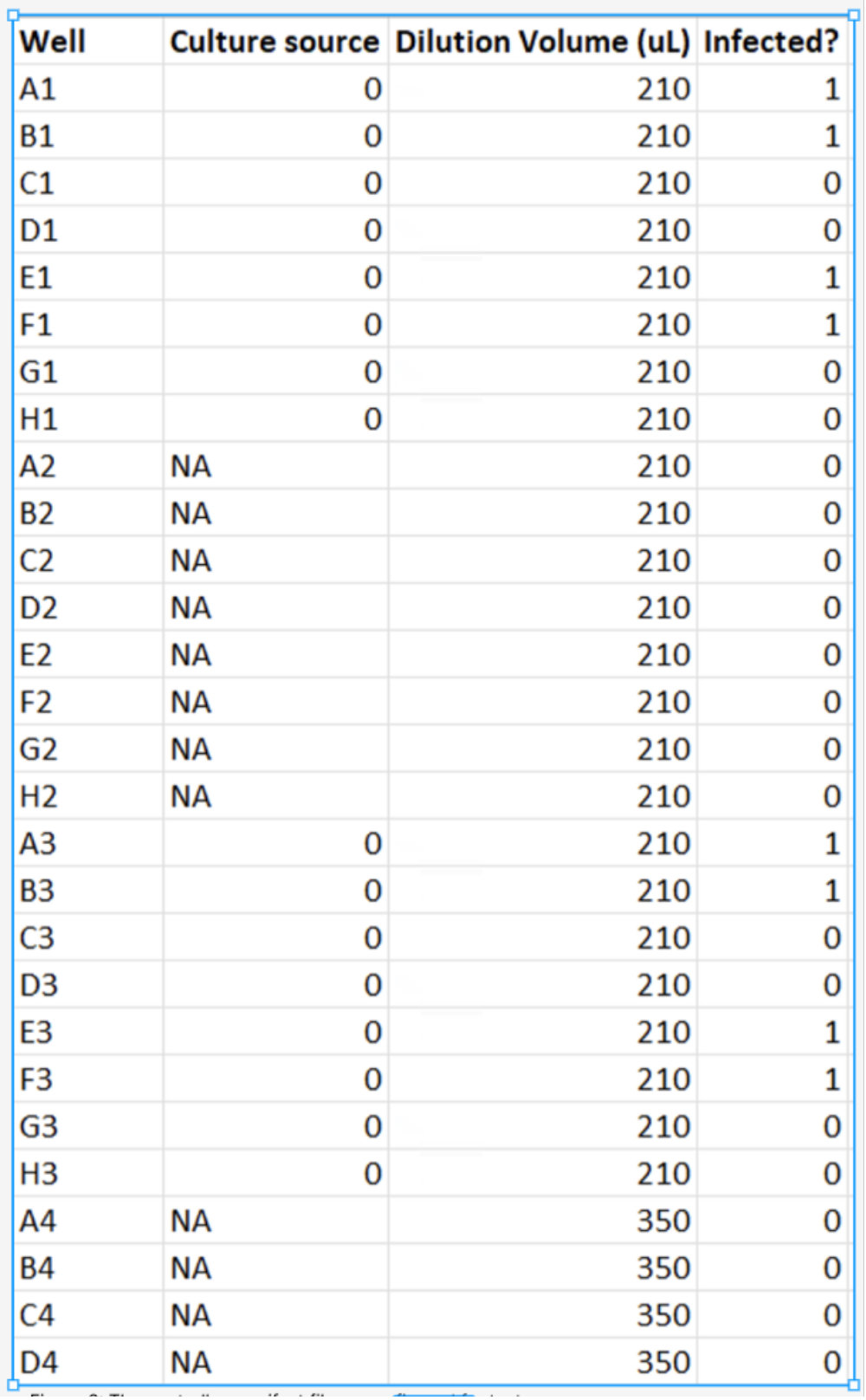
- 그림 7과 같이 DilutionCalculator.xlsx 스프레드시트(보충 파일 2로 제공됨)를 사용하여 석호의 희석률을 계산합니다.
- robot_method.py 파일을 의도한 석호 높이로 업데이트합니다. 이 프로토콜을 따르려면 프로그램에서 변수 fixed_lagoon_height의 기본값으로 14(밀리미터 단위)를 사용합니다. 이는 시스템의 550μL의 석호 부피에 해당하지만 사용되는 특정 96-딥 웰 플레이트에 따라 다를 수 있습니다.
- 깨끗하게 여과된 피펫 팁을 로봇 데크의 지정된 위치에 놓고 팁 랙을 팁 홀더에 테이프로 붙여서 실행 중 안정성을 보장합니다.
- 깨끗한 96-deep-well 플레이트를 지정된 위치의 로봇 데크에 놓습니다.
- 깨끗한 96웰 리더 플레이트를 로봇 데크의 지정된 위치에 놓습니다.
- 플레이트 리더 트레이가 기존 플레이트로 채워져 있지 않은지 확인하십시오.
- 펌프가 컴퓨터에 연결되어 있고 올바른 주소에 할당되어 있는지 확인하십시오.
- 펌프를 활성화하여 표백제를 펌핑한 다음 물을 펌핑하여 펌프 라인을 청소하십시오.
- 펌프 라인을 적절한 소스 및 출력에 연결하고 올바른 라인이 관련 박테리아 배양에 연결되도록 세심한 주의를 기울입니다.
- 박테리아 저장소 및 피펫 팁 세척을 위해 표백제/물이 들어 있는 탱크/버킷을 다시 채우십시오.
- 데크의 모든 구성 요소, 특히 이동식 요소가 지정된 위치에 고정되어 있는지 확인합니다.
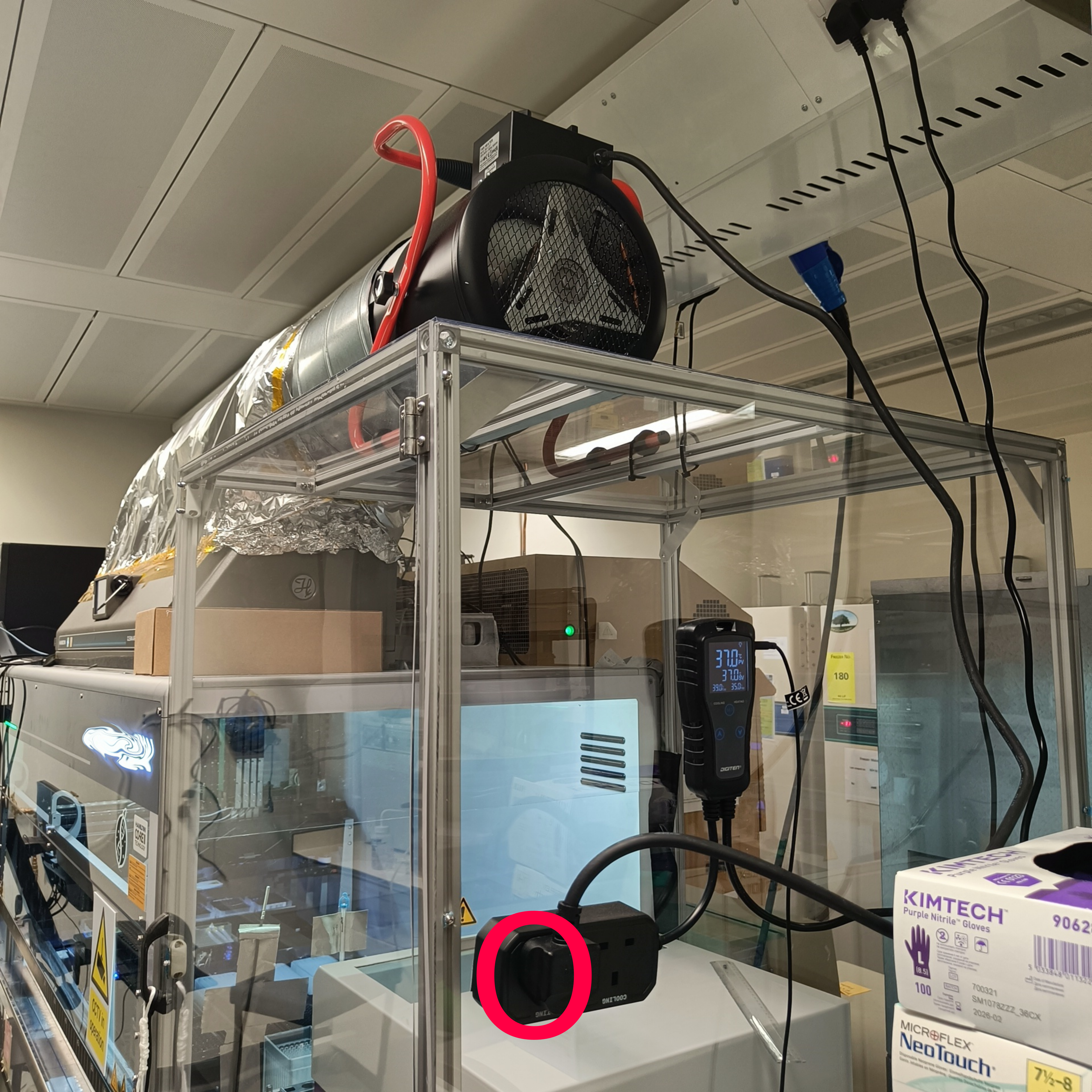
- 목표 온도(예: 37°C; 그림 8).
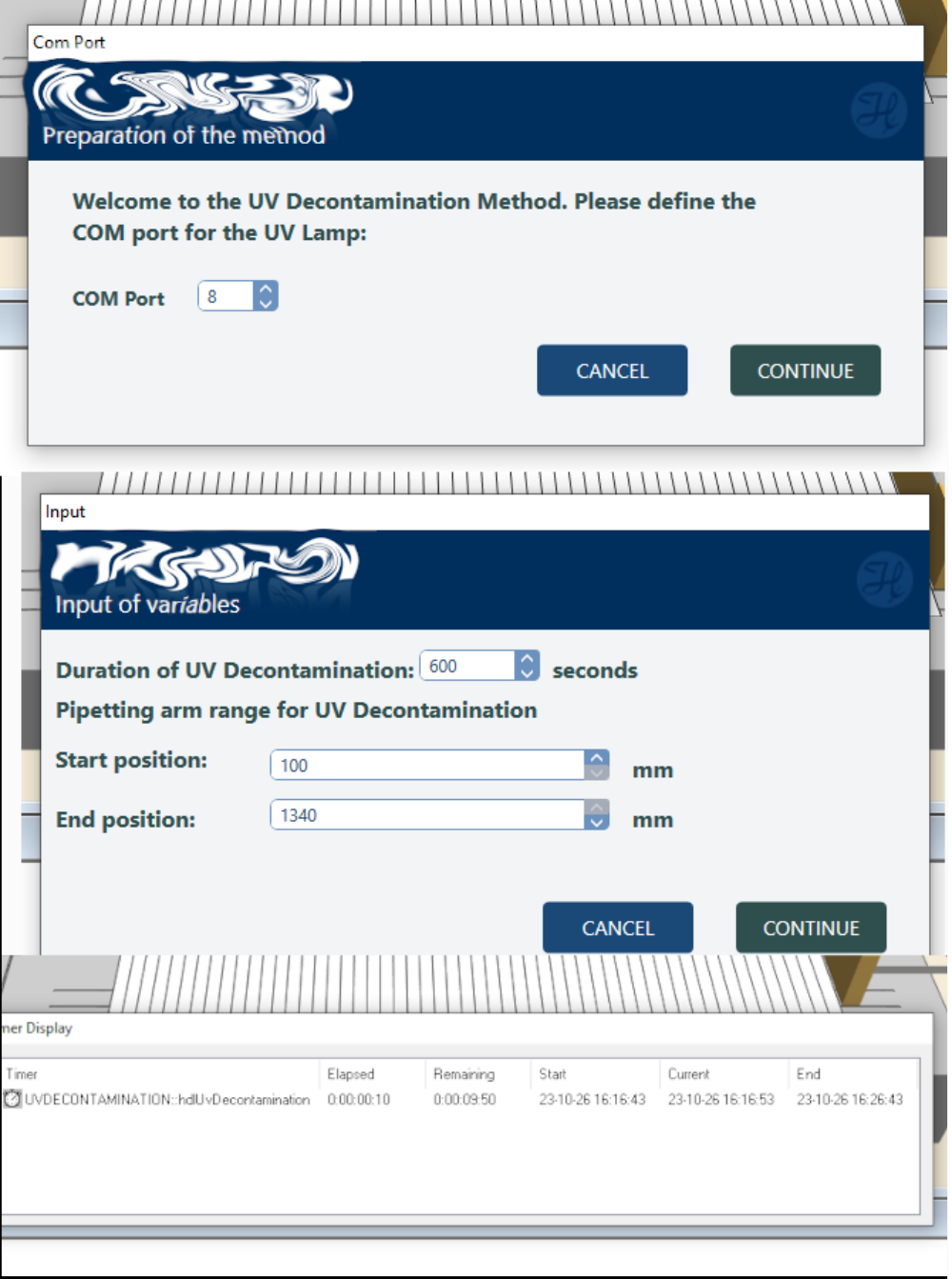
- UV 멸균 프로토콜 실행 file 제조업체에서 제공한 액체 처리 로봇에 내장된 UV 멸균 램프를 10분 동안 작동시킵니다(그림 9).
- 프로그램이 실행될 때 열리는 로봇 실행 제어 창의 왼쪽 상단에 있는 PLAY 버튼을 선택합니다.
- 600초 동안 parametrized 옵션을 사용하여 파일을 실행합니다.
- 로봇 실행 제어 소프트웨어가 닫혀 있는지 확인하십시오.
알림: 실행 중인 Run Control 소프트웨어의 기존 인스턴스가 있는 경우 로봇 방법 프로그램이 충돌합니다.
4. 하드웨어 및 소프트웨어 통합
- PRANCE 로봇 분석법 프로그램이 모든 배양균과 습식 시약을 물로 대체하여 밤새 실행되는 '물 달리기'를 수행합니다.
알림: 이 테스트는 실온에서 실행할 수 있습니다.- 그림 5 및 그림 6과 같이 1 부피/h의 효과적인 석호 희석률을 위해 설정된 controller_manifest 및 robot_method 사용하여 위에서 설명한 대로 사전 실행 준비를 완료합니다.
- '박테리아 in' 라인을 물통에 연결하여 물 흐르기 위해 로그 단계 박테리아를 교체합니다.
알림: 식용 색소를 수원에 추가하여 실험을 통해 액체 이동을 추적할 수 있습니다. - 해당 디렉터리에서 명령줄을 엽니다.
- 새로운 실행 플래그(py robot_method.py --new)를 사용하여 Python으로 로봇 메서드 프로그램을 호출하고 로그 파일 이름(TestRun), 석호 웰 수 (16), 주기 기간 (30), 리더 플레이트당 주기 수 측정 (4) 및 유도기 부피 (유도기 부피는 0 )이 테스트 실행의 경우 그림 5와 같이 아라비노스로 돌연변이 유발이 유도되는 진화 중에 이 값은 10μL일 수 있습니다.
- 인수가 제공된 후 프로그램이 실행될 때 열리는 Robot Run Control 창의 왼쪽 상단에 있는 PLAY 버튼을 선택합니다.
알림: PRANCE 방법은 빈 석호판을 사용하여 시작할 수 있으며 석호의 액체 부피는 처음 6주기 동안 최종 부피와 평형을 이룹니다.
- PRANCE 프로토콜이 박테리오파지 없이 목표 온도의 박테리아 배양으로만 밤새 실행되는 '박테리아 전용 실행'을 수행합니다.
- 그림 5 및 그림 6과 같이 1 부피/h의 효과적인 석호 희석률을 위해 설정된 controller_manifest 및 robot_method 사용하여 위에서 설명한 대로 사전 실행 준비를 완료합니다. 히터가 목표 온도인 37°C에 대해 켜져 있는지 확인하십시오.
- '박테리아 in' 라인을 선택한 로그 단계 박테리아 소스에 연결합니다.
- 해당 디렉터리에서 명령줄을 엽니다.
- 새로운 실행 플래그(py robot_method.py --new)를 사용하여 Python으로 로봇 메서드 프로그램을 호출하고 이전 섹션 4.1.4에서 자세히 설명한 대로 요청된 인수를 입력합니다.
- 인수가 제공된 후 프로그램이 실행될 때 열리는 Robot Run Control 창의 왼쪽 상단에 있는 PLAY 버튼을 선택합니다.
- 진화된 단백질을 가진 파지가 그 단백질을 필요로 하는 박테리아에서 번식하도록 도전하는 '감염 테스트'를 실행합니다.
참고: 파지를 접종할 석호와 접종하지 않을 석호를 미리 결정하여 교차 오염을 감지하기 위한 무파지 대조군 석호 역할을 합니다.- 그림 5 및 그림 6과 같이 1 부피/h의 유효 희석률을 위해 설정된 controller_manifest 및 robot_method 사용하여 위에서 설명한 대로 사전 실행 준비를 완료합니다. 히터가 목표 온도인 37°C에 대해 켜져 있는지 확인하십시오.
- '박테리아 in' 라인을 선택한 로그 단계 박테리아 소스에 연결합니다.
- 해당 디렉터리에서 명령줄을 엽니다.
- 새로운 실행 플래그(py robot_method.py --new)를 사용하여 Python으로 로봇 메서드 프로그램을 호출하고 이전 섹션 4.1.4에서 자세히 설명한 대로 요청된 인수를 입력합니다.
- 인수가 제공된 후 프로그램이 실행될 때 열리는 Robot Run Control 창의 왼쪽 상단에 있는 PLAY 버튼을 선택합니다.
- 박테리오파지를 첨가하기 전에 2-3시간 동안 방법을 실행하여 석호 플레이트의 부피와 박테리아 OD를 평형화합니다.
- 프로그램이 휴면 상태일 때 실행 주기가 끝날 때 106 pfu/mL의 박테리오파지를 with-phage 석호에 접종합니다(예: 플라크 분석 또는 qPCR에 의해 결정된 108 pfu/mL에서 5.5 μL의 파지 분취액), 550 μL 석호에 접종합니다.
- 하룻밤 동안 프로그램을 실행한 다음 플라크 분석 또는 qPCR을 통해 석호 웰의 파지 역가를 확인합니다.
대표적 결과
감염 검사 결과
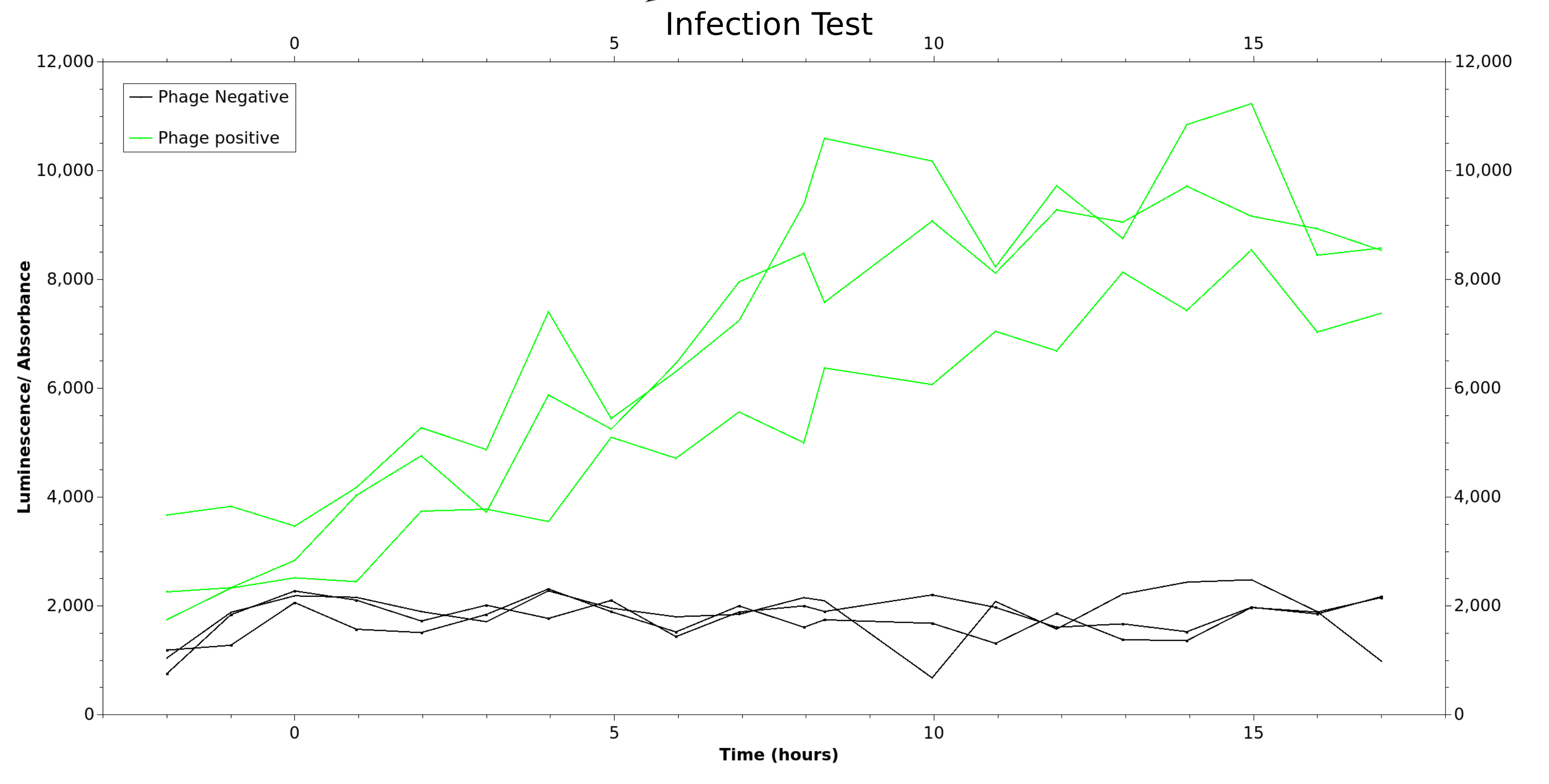
이 테스트는 박테리아 배양, 파지 클로닝 및 역가, 장비의 온도 안정성, 액체 취급 설정 및 플레이트 리더 통합과 관련된 문제를 보여줍니다. 성공적인 파지 감염 검사는 파지를 접종한 석호에서는 명확하고 빠른 파지 감염을 나타내고 파지가 없는 석호에서는 신호가 없음을 나타냅니다. 그림 10 은 파지 감염 검사의 몇 가지 대표적인 결과를 보여줍니다. 실험 결과는 또한 "고온 PRANCE"(살아있는 박테리아 탁도에 의해 공급됨) 또는 "저온 PRANCE"(냉장 중간 로그 상 배양에 의해 공급됨) 구성이 구현되고 있는지 여부에 따라 이 PRANCE 논문8의 그림 1d 및 1c와 비교할 수 있습니다. 이 테스트를 통해 몇 가지 일반적인 문제가 드러날 수 있습니다. 박테리아 배양 준비에 문제가 있으면 감염이 약하거나 없는 경우가 많습니다. 박테리아는 중간 로그 단계와 37°C에 있을 때만 M13 파지에 의해 최적으로 감염될 수 있습니다. 다른 온도와 성장 단계에서는 필루스 발현이 약하여 파지 감염에 덜 취약하다12. 낮은 titer 파지 또는 백본 돌연변이가 있는 파지로 접종하면 신호가 지연되거나 부재할 수 있습니다. 형광 또는 발광에 대한 플레이트 리더 게인 설정과 관련된 문제는 이 테스트를 통해 드러날 것입니다.

그림 1: PRANCE 장치의 감염 테스트 실행 중 작동하는 유전자 회로의 개략도. 파지 게놈에 인코딩된 T7 RNA 중합효소가 대장균 숙주를 감염시키면 전사되어 T7 promoter의 AP에 결합하여 pIII 파지 단백질과 luxAB 단백질의 전사를 유도하여 파지 증식 및 발광 생성을 촉진합니다. 약어: PRANCE = Phage- and Robotics-assisted Near-continuous Evolution; AP = 액세서리 플라스미드. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 2: PRANCE 시스템의 물리적 구성 요소 개략도. 냉장고에는 교반된 배양액이 저장되어 있으며, 이 배양액은 일련의 펌프에 의해 로봇 데크로 옮겨져 박테리아 저장소인 "와플"로 옮겨집니다. 액체 처리 로봇은 피펫팅 헤드를 사용하여 박테리아 배양을 "와플"에서 배양 온도로 예열하기 위해 홀딩 웰로 이동한 다음 주 배양이 발생하는 석호로 이동하는 데 사용됩니다. 홀딩 웰과 라군은 모두 표준 2mL 딥 웰 플레이트입니다. 로봇은 샘플을 일회용 리더 플레이트로 가져가고, 이 플레이트는 측정을 위해 플레이트 리더로 이동합니다. 약어: PRANCE = Phage- and Robotics-assisted Near-continuous Evolution. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

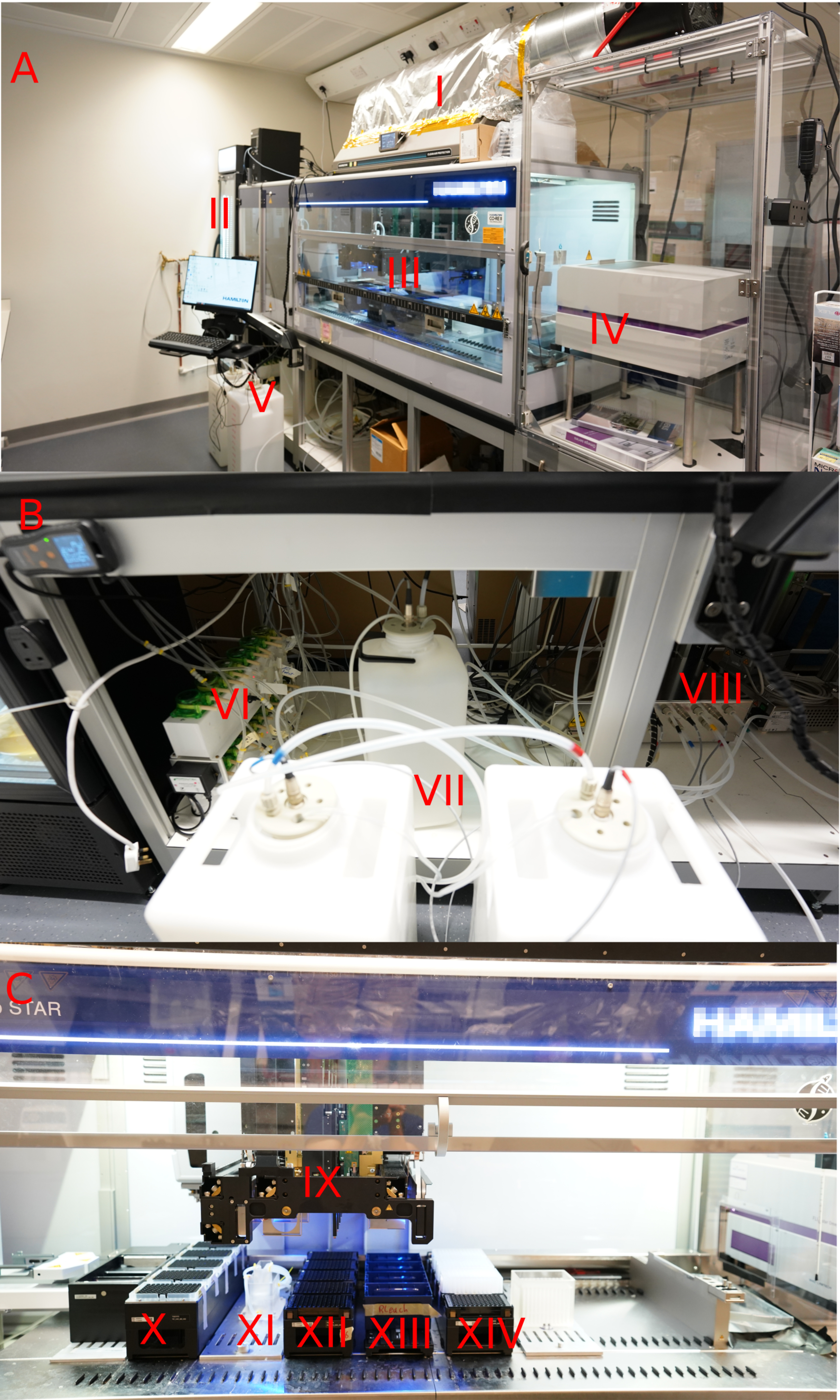
그림 3: PRANCE 로봇 장치. (A) PRANCE 설정. (I) HEPA 필터 및 외부 히터. (II) 배양 냉장고. (III) 메인 로봇 인클로저. (IV) 플레이트 리더. (V) 펌프 및 탱크. (B) 로봇 인클로저. (VI) 주요 배양 펌프. (VII) 물, 폐기물 및 표백제 탱크. (VIII) 워셔 펌프. (C) 로봇 인클로저. (IX) 로봇 피펫팅 암 및 그리퍼. (X) 피펫 팁. (XI) 로봇에 배양 분배를 가능하게 하는 3D 프린팅 구성 요소("와플"). (XII) 플레이트 리더에서 샘플링을 위한 플레이트. (XIII) 팁 세척용 양동이. (XIV) "석호(Lagoons)": 진화적 배양이 이루어지는 배양 용기. 약어: PRANCE = Phage- and Robotics-assisted Near-continuous Evolution; HEPA = 고효율 미립자 공기. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 4: 데크 레이아웃. (A) 로봇 제어 소프트웨어에서 데크 레이아웃의 3D 표현. (B) 데크 구성 요소의 사진. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 5: 예제 매개변수(위)와 실행 제어 소프트웨어(아래)가 있는 명령줄 스크린샷. 재생 버튼은 왼쪽 상단에 있으며 로컬 구현에 따라 마우스로 클릭하거나 터치스크린으로 작동할 수 있습니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 6: 테스트 실행을 위해 구성된 컨트롤러 매니페스트 파일 배양 #0을 포함하는 석호는 96-deep-well plate의 열 1과 3에 있을 것입니다. 나머지 열은 비어 있습니다. 96-deep-well-plate의 A, B, D, E열은 오른쪽 열에 파지(1)에 의한 감염으로 표시되어 있고, 다른 열(0)은 노파지 대조군입니다. 컨트롤러 매니페스트의 이 인스턴스는 프로그램이 매 사이클마다 210μL의 배양액으로 석호를 희석하는 결과를 낳습니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 7: DilutionCalculator 스프레드시트를 사용한 유효 석호 희석률 계산. DilutionCalculator 스프레드시트에 대한 보충 파일 2를 참조하십시오. 이 그림에서 볼 수 있듯이 30분 주기마다 210μL의 신선한 배양액으로 희석되는 550μL 석호와 4주기마다 판독기 플레이트 측정을 위한 150μL 샘플이 채취되는 경우 1.0석호 부피/h의 유효 희석률에 해당합니다(1시간마다 시간 시작 시 원래 석호 액체의 50%가 남음) 더 큰 버전을 보려면 여기를 클릭하십시오. 숫자.
{kind=link}

그림 8: 로봇 히터 시스템. 히터는 빨간색 원으로 표시된 대로 전원 공급 장치를 연결하여 활성화됩니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 9: UV 오염 제거 프로토콜 설정. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 10: PRANCE 시스템에서 실행된 감염 테스트 측정. 실행 중에 샘플을 채취하고 발광 및 흡광도를 측정합니다. 각 석호에 대해 발광 측정값은 해당 흡광도 측정값으로 나뉘어 시간 함수로 표시됩니다. 파지에 감염된 석호는 녹색으로 표시되지만, 감염되지 않은 대조군 석호는 검은색으로 표시됩니다. 약어: PRANCE = Phage- and Robotics-assisted Near-continuous Evolution. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
보충 파일 1: 최소한 박테리아 저장소/분배 매니폴드("와플")를 포함하여 PRANCE 시스템에 필요한 맞춤형 데크 구성 요소를 3D 프린팅하기 위한 STL 파일. 이 파일을 다운로드하려면 여기를 클릭하십시오.
보충 파일 2: DilutionCalculator 스프레드시트. 이 파일을 다운로드하려면 여기를 클릭하십시오.
토론
장비를 표준화하려는 노력에도 불구하고 실질적으로 모든 PRANCE 설정은 장비 공급, 하드웨어 및 소프트웨어 버전 관리의 변경으로 인해 다를 것입니다. 결과적으로 각 PRANCE 설정은 고유한 설정 문제를 나타내며 효과적인 모듈식 문제 해결을 위해 각 구성 요소의 목적에 대한 포괄적인 이해가 필요합니다.
이 방법은 확립된 PRANCE 시스템의 설정 및 테스트를 위한 단계별 프로토콜을 설명합니다. 먼저 하드웨어 및 소프트웨어의 중요한 요소에 초점을 맞춘 다음 시스템이 PRANCE를 사용할 준비가 되었는지 확인하는 일련의 테스트 실행을 준비하고 수행하기 위한 필수 단계를 자세히 설명합니다.
하드웨어의 필수 기능은 박테리오파지를 사용한 다중 실험 중 시료 교차 오염의 위험을 줄이기 위한 최적화입니다. 팁 재사용과 호환되고 포스 핏 팁을 피하여 팁 배출 중에 생성되는 에어로졸을 최소화하는 것으로 생각되는 로봇 팁 기술이 적용된 독점적으로 필터링된 팁을 사용하는 것이 좋습니다. 이 프로토콜에 따라 강력한 팁 세척을 통해 팁을 재사용할 수 있지만 각 시스템에서 감염 테스트의 일부로 적절성을 검증해야 합니다. 자가 멸균은 또한 시스템에 대한 물과 표백제의 일관된 공급에 달려 있습니다. 이들은 탱크/버킷에 보관되며 고갈되면 자가 멸균이 손상되고 급격한 교차 오염이 발생합니다. 특정 펌프 설정이 주어졌을 때 세척 장비가 물과 표백제를 소비하는 속도를 벤치마킹하기 위해 프로그램 실행 전후에 촬영한 탱크/버킷의 사진을 찍을 수 있습니다.
시스템의 또 다른 핵심 요소는 박테리아 성장 단계와 온도를 유지하는 것입니다. PRANCE 실험은 S2060 대장균 박테리아 균주(Addgene: #105064)를 사용하여 수행됩니다. K12 유래 F-플라스미드 함유 균주는 생물막 감소에 최적화되어있다 7. 또한, 이 균주의 F-플라스미드는 플라스미드 유지를 위한 테트라사이클린 저항성 카세트, luxAB 매개 발광 모니터링을 보완하기 위한 luxCDE 및 luxR, 플라크의 비색 시각화를 가능하게 하는 파지 쇼크 프로모터 아래의 lacZ를 추가하여 편집되었습니다. F-플라스미드로 인코딩된 F-필러스는 M13 파지 감염에 필요합니다. 따라서 PACE에 사용되는 박테리아는 37°C에서 F-pilus12가 발현되고 M13 파지 감염, 증식 및 진화가 가능한 중간 로그 단계에서 배양해야 합니다. 정적 온도 조절을 위해 기성품 가열판 캐리어를 사용할 수 있습니다. 대안은 저렴한 히터를 사용하여 HEPA 필터로 들어가는 공기를 가열하는 것이지만 하드웨어의 마모가 가속화될 수 있으므로 권장하지 않습니다. 또한 이것은 사용 시 표백제/물 양동이 및 유도기와 같은 보조 데크 유체의 증발을 가속화합니다.
소프트웨어 패키지의 보정은 적절한 시스템 기능을 위해서도 필수적입니다. 소프트웨어 데크 레이아웃과 실제 로봇 데크 간의 차이는 작동 중 시스템 오류의 가장 일반적인 원인입니다. 연동 펌프 사용은 튜브 마모 및 유체 부피 변화로 이어질 수 있으므로 박테리아 배양, 표백제 및 시스템 배수를 공급하는 보조 펌프의 정기적인 교정이 중요합니다.
물 실행 테스트는 잘못된 액체 취급 설정, 유체 누출/잘못된 연결 및 소프트웨어 불안정을 포함하여 여러 가지 일반적인 설정 문제를 신속하게 보여줍니다. 성공적인 물 공급은 예기치 않은 액체 누출을 나타내지 않고 밤새 오류 없이 안정적으로 작동합니다. 특정 액체 처리 단계를 실행하지 못하거나, 피펫에서 물이 떨어지거나, 실행 중에 프로토콜이 멈추는 등 물 공급 중에 발생할 수 있는 여러 가지 일반적인 문제가 있습니다. 특정 액체 취급 단계를 실행하지 못한 경우 모든 액체 등급이 설치되었는지 확인하십시오. 여기에는 적절한 점도와 피펫팅 속도가 나열되며 제조업체에서 제공하는 로봇 제어 소프트웨어에서 조정됩니다. 피펫에서 물방울이 떨어지는 경우, 깨끗한 피펫팅을 가능하게 하고 파지 교차 오염을 제거하기 위해 로봇 피펫팅 암 설정이 정확해야 합니다. 성공적인 로봇 피펫팅을 위해서는 올바른 액체 등급, 모든 실험기구의 올바른 데크 레이아웃 높이, PRANCE 로봇 분석법 프로그램에 지정된 적절한 피펫팅 높이 오프셋이 필요합니다. 이러한 높이 오프셋은 직접 조정이 필요할 수 있습니다. 프로토콜이 실행 중간에 중지되면 데크 레이아웃 파일이 실제 데크 구성과 일치하지 않을 수 있음을 나타내는 다양한 오류에 의해 생성되는 경우가 많습니다.
박테리아 전용 실행 테스트는 플레이트 리더 설정 및 실시간 데이터 시각화 문제, 과도한 표백제 농도 또는 불충분한 헹굼 문제, 온도 안정성을 보여줍니다. 박테리아 전용 실행에 성공하면 처음 세 주기 동안 석호 흡광도의 평형을 나타내고 실행 기간 동안 안정적인 흡광도가 나타납니다. 또한 몇 가지 일반적인 문제가 드러날 수 있습니다. 이것은 플레이트 리더에 의해 생성된 데이터가 플로팅되는 첫 번째 단계입니다. 플레이트 리더 데이터베이스의 데이터가 제대로 저장되지 않거나 제대로 플롯되지 않을 수 있습니다. 박테리아가 흡광도에서 평형을 이루지 못하면 표백제 농도가 너무 높다는 것을 나타낼 수 있습니다. 과도한 표백제 또는 불충분한 세척은 실험기구 조각뿐만 아니라 전체 실험을 살균할 수 있습니다. 이것이 의심되는 경우 표백제 감지 스트립을 사용하여 석호를 테스트할 수 있습니다. 배양 온도의 안정성은 온도계 건으로 확인할 수 있습니다.
감염 테스트에 성공하면 시스템이 PRANCE를 실행할 준비가 되었음을 나타냅니다. 감염 검사는 박테리아 배양액이 포함된 석호의 하위 집합을 접종하여 수행할 수 있습니다. 이 박테리아는 pIII(ΔgIII)에 대한 유전자가 없는 적절한 파지에 감염되면 pIII를 발현하여 파지 증식을 가능하게 합니다. 테스트를 위한 한 가지 가능한 조합은 임의의 ΔgIII 파지와 함께 파지 쇼크 프로모터 하에서 pIII를 발현하는 플라스미드로 형질전환된 S2060 박테리아를 사용하는 것입니다. 그림 1과 같이 pIII와 luxAB가 T7 promoter(Plasmid pJC173b13)에 의해 구동되는 액세서리 플라스미드로 형질전환된 S2060 박테리아와 함께 야생형 T7 RNA 중합효소를 포함하는 ΔgIII 파지를 사용하는 것이 좋습니다. 이를 통해 테스트 실행 중 플레이트 리더 매개 감염 모니터링도 가능합니다. 감염 검사의 성공과 교차 오염의 부재에 대한 결정적인 증거는 검사 및 대조군 석호의 파지 적정에서 얻을 수 있습니다. 루시페라아제 리포터를 사용하는 경우, 그림 3에서 볼 수 있듯이 테스트 웰에서만 발광이 증가하는 것도 성공적인 파지 감염 및 전파의 지표입니다. 파지 역가 정량화의 황금 표준은 플라크 분석(plaque assay)입니다7. qPCR7에 의한 M13 정량 프로토콜도 더 빠를 수 있지만, 이는 감염성 및 비감염성 파지 입자를 구별하지 않으므로 역가를 과대 평가할 수 있습니다.
메인 프로그램은 매니페스트 파일(일반 텍스트 데이터베이스 파일)을 참조하며, 이 파일은 각 증식 배양물의 사이클당 희석량과 선택 엄격성이 다를 수 있는 잠재적인 박테리아 배양 공급 원료의 선택을 지시합니다. 이러한 방식으로 매니페스트 파일은 PRANCE 실행의 많은 매개 변수를 정의합니다. 이 파일은 작업자 또는 시스템이 실행하는 동안 편집할 수 있으며, 이는 수동 또는 자동 피드백 제어가 적용될 수 있음을 의미합니다.
완벽하게 작동하는 PRANCE 설정의 유용성은 주의 깊게 모니터링되고 통제된 환경에서 대규모 개체군을 빠르게 진화시킬 수 있는 능력에 있습니다. 플레이트 기반 형식은 PRANCE를 더 작은 기성품 turbidostat 기반 시스템14,15을 사용하는 것과 같은 다른 기술과 구별합니다. 플레이트 기반 설정은 추가 로봇 처리 단계와의 쉬운 통합을 용이하게 할 뿐만 아니라 원심분리기와 같은 다른 실험실 기기와의 호환성을 용이하게 합니다. 또한 여러 인스턴스에서 동시에 가속 진화를 수행할 수 있는 기능은 실험에 또 다른 차원을 도입하여 다양하고 강력한 결과를 얻을 수 있는 가능성을 높입니다. PRANCE에 필수적인 세분화된 제어 및 피드백 시스템은 실험의 예측 가능성과 신뢰성을 더욱 강화하여 유도 진화 기술 분야에서 상당한 발전을 이루었습니다. 그러나 이 기술은 수행할 수 있는 병렬 실험의 수가 제한되어 있습니다. 구성에 따라 PRANCE 설정은 일반적으로 로봇 피펫팅 속도 또는 사용 가능한 데크 공간에 의해 제한됩니다.
PRANCE에 사용된 것과 동일한 하드웨어와 소프트웨어를 박테리오파지를 사용하지 않는 진화 방법에도 적용할 수 있습니다. 다중탁도스탯(many-turbidostats) 방법11에서 입증된 바와 같이, 이 동일한 기기는 박테리아에만 사용할 수 있으며, 전체 게놈 적응 진화 실험을 가능하게 합니다. 이러한 적응성은 이 장비의 범위를 넓혀 새로운 형태의 로봇 가속 진화를 위한 길을 열었습니다.
공개
저자는 공개할 갈등이 없습니다.
감사의 말
하드웨어 및 소프트웨어 설정에 대한 도움과 조언을 해주신 Emma Chory와 Kevin Esvelt에게 감사드립니다. 사미르 아우제인(Samir Aoudjane), 오사이드 아더(Osaid Ather), 에리카 드베네딕티스(Erika DeBenedictis)는 스틸 펄롯 초기 조사관 보조금(Steel Perlot Early Investigator Grant)의 지원을 받습니다. 이 연구는 영국 암 연구(Cancer Research UK, CC2239), 영국 의학 연구 위원회(UK Medical Research Council, CC2239) 및 웰컴 트러스트(Wellcome Trust, CC2239)로부터 핵심 자금을 지원받는 프랜시스 크릭 연구소(Francis Crick Institute)의 지원을 받았습니다.
자료
| Name | Company | Catalog Number | Comments |
| 3D printed bacterial reservoir "waffle" | - | - | https://drive.google.com/file/d/16ELcvfFPzBzNSto0xUrBe-shi23J9Na7/view; For Robot deck |
| 3D printer | FormLabs | Form 3B+ | 3D printer components |
| 3D printer resin (clear) | FormLabs | RS-F2-GPCL-04 | consumable for 3D printer |
| 8-1,000 µL head | Hamilton | 10140943 | For Liquid handling robot |
| 96-1,000 µL pipetting head | Hamilton | 10120001 | For Liquid handling robot |
| Black polystyrene plate reader microplates | Millipore Sigma | CLS3603 | For Robot deck |
| BMG Labtech Spectrostar FLuorstar Omega | BMG Labtech | 10086700 | For Liquid handling robot |
| Cleaning solution | Fluorochem Limited | F545154-1L | used to clean the liquid handling parts of the robot |
| Deep Well plates | Appleton Woods | ACP006 | these are used to contain evolving bacteria on the deck of the robot |
| encolsure heater | Stego | 13060.0-01 | heats inside robot enclosure |
| Hamilton STAR | Hamilton | 870101 | For Liquid handling robot |
| Heater | Erbauer | BGP2108-25 | For Liquid handling robot |
| HIG Bionex centrifuge | Hamilton | 10086700 | For Liquid handling robot |
| iSWAP plate gripper | Hamilton | 190220 | For Liquid handling robot |
| laboratory tubing | Merck | Z280356 | to construct liquid handling manifold |
| luer to barb connector | AIEX | B13193/B13246 | for connectorizing tubing |
| Magnetic stir plate | Camlab | SKU - 1189930 | For Auxiliary Fridge |
| Molcular pipetting arm | Hamilton | 173051 | For Liquid handling robot |
| Omega | BMG labtech | 5.7 | plate reader control software |
| One way Check Valves | Masterflex | MFLX30505-91 | to one way sections of liquid handling manifold |
| pyhamilton | MIT/Open source | https://github.com/dgretton/std-96-pace%20PRANCE | open source python robot control software |
| pymodbus | opensource | 3.5.2 | python pump software interface |
| Refrigetator | Tefcold | FSC175H | allows cooled bacteria to be used instead of turbidostat |
| S2060 Bacterial strain | Addgene | Addgene: #105064 | E. coli |
| temperature controller | Digiten | DTC102UK | Used to control heaters thermostatically |
| Thermostat switch controller | WILLHI | WH1436A | WILLHI WH1436A 10 A Temperature Controller 110 V Digital Thermostat Switch Sous Vide Controller NTC 10K Sensor Improved Version; for Liquid handling robot |
| Venus | Hamilton | 4.6 | proprietary robot control software |
| Wash Station for MPH 96/384 | Hamilton | 190248 | For Liquid handling robot |
| Suggested pump manufacturers | |||
| Company | Catalog number | Notes | Documentation |
| Agrowtek | AD6i Hexa Pump | https://www.agrowtek.com/doc/im/IM_ADi.pdf | |
| Amazon | INTLLAB 12V DC | ||
| Cole-Parmer | EW-07522-3 | Masterflex L/S Digital Drive, 100 RPM, 115/230 VAC | https://pim-resources.coleparmer.com/instruction-manual/a-1299-1127b-en.pdf |
| Cole-Parmer | EW-07554-80 | Masterflex L/S Economy variable-speed drive, 7 to 200 rpm, 115 VAC | https://pim-resources.coleparmer.com/instruction-manual/a-1299-1127b-en.pdf |
참고문헌
- Esvelt, K. M., Carlson, J. C., Liu, D. R. A system for the continuous directed evolution of biomolecules. Nature. 472, 499-503 (2011).
- Pu, J., Zinkus-Boltz, J., Dickinson, B. C. Evolution of a split RNA polymerase as a versatile biosensor platform. Nat Chem Biol. 13 (4), 432-438 (2017).
- Pu, J., Disare, M., Dickinson, B. C. Evolution of C-terminal modification tolerance in full-length and split T7 RNA polymerase biosensors. Chembiochem. 20 (12), 1547-1553 (2019).
- Xie, V. C., Styles, M. J., Dickinson, B. C. Methods for the directed evolution of biomolecular interactions. Trends Biochem Sci. 47 (5), 403-416 (2022).
- Popa, S. C., Inamoto, I., Thuronyi, B. W., Shin, J. A. Phage-assisted continuous evolution (PACE): A guide focused on evolving protein-DNA interactions. ACS Omega. 5 (42), 26957-26966 (2020).
- Wang, T., Badran, A. H., Huang, T. P., Liu, D. R. Continuous directed evolution of proteins with improved soluble expression. Nat Chem Biol. 14 (10), 972-980 (2018).
- Miller, S. M., Wang, T., Liu, D. R. Phage-assisted continuous and non-continuous evolution. Nat Protoc. 15 (12), 4101-4127 (2020).
- DeBenedictis, E. A., et al. Systematic molecular evolution enables robust biomolecule discovery. Nat Methods. 19 (1), 55-64 (2022).
- Zhong, Z., et al. Automated continuous evolution of proteins in vivo. ACS Synth Biol. 9 (6), 1270-1276 (2020).
- Roth, T. B., Woolston, B. M., Stephanopoulos, G., Liu, D. R. Phage-assisted evolution of Bacillus methanolicus methanol dehydrogenase 2. ACS Synth Biol. 8 (4), 796-806 (2019).
- Chory, E. J., Gretton, D. W., DeBenedictis, E. A. Enabling high-throughput biology with flexible open-source automation. Mol Syst Biol. 17 (3), 9942 (2021).
- Novotny, C. P., Lavin, K. Some effects of temperature on the growth of F pili. J Bacteriol. 107 (3), 671-682 (1971).
- Carlson, J. C., Badran, A. H., Guggiana-Nilo, D. A., Liu, D. R. Negative selection and stringency modulation in phage-assisted continuous evolution. Nat Chem Biol. 10 (3), 216-222 (2014).
- Steel, H., Habgood, R., Kelly, C., Papachristodoulou, A. In situ characterization and manipulation of biological systems with Chi.Bio. PLOS Biology. 18 (7), e3000794 (2020).
- Wong, B. G., Mancuso, C. P., Kiriakov, S., Bashor, C. J., Khalil, A. S. Precise, automated control of conditions for high-throughput growth of yeast and bacteria with eVOLVER. Nat Biotechnol. 36 (7), 614-623 (2018).
재인쇄 및 허가
JoVE'article의 텍스트 или 그림을 다시 사용하시려면 허가 살펴보기
허가 살펴보기This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. 판권 소유