
Method Article
O Clicker biônico Mark I & II
Neste Artigo
Resumo
Um dispositivo foi criado para demonstrar o controle baseado em eletromiografia para uma audiência leiga. Depois do sucesso do dispositivo inicial, um segundo dispositivo foi feito com maior flexibilidade em termos de funcionalidade para fins de investigação e demonstração. Este protocolo descreve o processo de construção e calibração de ambos os dispositivos.
Resumo
Neste manuscrito, apresentamos dois sistemas 'Comando Biônico', o primeiro desenvolvido para demonstrar a eletromiografia (EMG) com base em sistemas de controle para fins educacionais e o segundo para fins de investigação. EMG com base no controle sistemas buscar sinais elétricos gerados pela ativação muscular e usá-los como entradas para os controladores. Controladores de EMG são amplamente utilizados em próteses para os membros do controle.
A marca eu (MK eu) controle remoto permite ao usuário mudar o slide de uma apresentação, levantando o dedo índice. É construído em torno de um microcontrolador e um bio-sinais escudo. Gerou muito interesse tanto do público e a comunidade de pesquisa.
O dispositivo Mark II (MK. II) aqui apresentado foi projetado para ser um sistema mais barato, mais elegante e mais personalizável que pode ser facilmente modificado e transmite diretamente dados EMG. É construído usando um microcontrolador capaz sem fio e um sensor de músculo.
Introdução
Centro de engenharia de reabilitação e tecnologia assistiva Aspire investiga técnicas que são aplicáveis e transferíveis entre diferentes domínios em áreas afins de interesse, incluindo mas não limitado a, acidente vascular cerebral, distrofia muscular, amputação, o envelhecimento da população e treinamento de habilidades especializadas. Uma área de pesquisa que o centro está envolvido em é neuroprosthesis. Das muitas técnicas usadas para controle de armas neuroprosthetic, EMG é uma das entradas mais comuns para o controle sistemas1,2,3,4,5,6. Isto é em grande parte devido à sua facilidade de uso e acessibilidade, quando comparado com outros sistemas de controle7. Recentemente desenvolvido próteses 3D-impresso, tais como a mão de Ada pode custar apenas 1.000 USD, ao utilizar este tipo de controle8,9,10. No entanto, ao tentar demonstrar tais sistemas para o público não há nenhuma maneira fácil de fazê-lo sem o auxílio de um amputado.
Para aumentar a consciência das actividades de investigação neste campo para membros do público, foi desenvolvido um dispositivo de demo do respondedor biônico. É muito importante usar demonstração baseada em objeto que atrai a atenção e acelera o aprendizado e a compreensão do assunto sendo ensinado11. Nosso dispositivo não só ajuda a ensinar o conceito de EMG, mas também para aumentar o conhecimento do desenvolvimento atual das tecnologias modernas. Além disso, ela inspira as gerações mais jovens para escolher a estudos nas áreas de ciência, tecnologia, engenharia e matemática (STEM).
O MK Clicker Bionic foi feita usando peças facilmente disponíveis que já estavam em uso dentro do laboratório. Ela consistia de um microcontrolador, um escudo de bio-sinais12, eletrodos, um painel de controle, uma placa de comunicação sem fio e uma bateria de 9 V. O dispositivo funcionou por pegar a atividade da musculatura abdutora do indicador, localizada entre o dedo indicador e o polegar. Provoca uma mudança de slide imitando um teclado e enviando um keypress' certo', sempre que um limite pré-selecionado foi alcançado. A placa de controle permitido para o envio manual de 'esquerda' e 'direita' keypresses (slides de progresso e retiro slides) e também pode ser usada para substituir a entrada de EMG se as coisas dessem erradas durante uma demonstração ao vivo.
Como parte das atividades de engajamento público de departamento de engenharia biomédica e física médica, demonstrámos o Clicker Bionic para membros do público. Recebeu uma resposta entusiástica da plateia e gerou interesse em iniciar várias colaborações. Depois do sucesso do dispositivo inicial destinava-se uma segunda versão do dispositivo.
O objetivo para o projeto do segundo dispositivo era produzir um dispositivo que era mais barato, menos complicado e mais personalizável do que o primeiro dispositivo. O objetivo deste dispositivo foi projetar algo que poderia facilmente ser modificado para projetos de estudantes e mais barato ser incorporados em projetos existentes. A principal vantagem deste dispositivo sobre outros disponível1,2,3,4,5,6 é sua facilidade de uso, tamanho pequeno e baixo custo. Embora os dispositivos de comando biônico podem não ter a resolução de outros dispositivos de pesquisa, tais como dispositivos de gatilho, eles são mais do que é boas o suficiente. O MK II seria uma base ideal para qualquer sistema que usa um limiar de EMG para acionar um dispositivo, como um controlador de prótese ou dispositivo de apoio.
O projeto foi baseado em torno de um microcontrolador sem fio, capaz e um sensor de músculo. Ele também incluiu um 3.7 V 150 mAh bateria de polímero de lítio, um painel de controle manual e um caso de 3D-impresso. A Figura 3 mostra uma visão geral das diferenças entre os desenhos. O design de MK II tem a mesma funcionalidade básica que o dispositivo original mas tem significativamente mais funcionalidade potencial para novas aplicações como monitorização de EMG sem fio.
Protocolo
O protocolo segue as diretrizes do Comitê de ética de pesquisa humana do University College London.
Atenção: Este protocolo contém um risco de choque elétrico e um risco de queimaduras (ferro de solda); Leia os dois antes de tentar este protocolo. Este protocolo inclui ligar um dispositivo à pele. Certifique-se de que, em nenhum momento, há um caminho entre a pele e electricidade da rede. Nunca toque o elemento do ferro de soldar. Segure os fios para ser aquecido com pinças ou grampos. Mantenha a esponja de limpeza molhada durante o uso. Sempre retornam o ferro de soldar para seu estande quando não estiver em uso. Nunca colocá-lo na bancada de trabalho. Desligue a unidade e desligue-o quando não estiver em uso.
1. montar os componentes de Base
Nota: Figura 3 dá uma visão de alto nível das etapas protocolo.
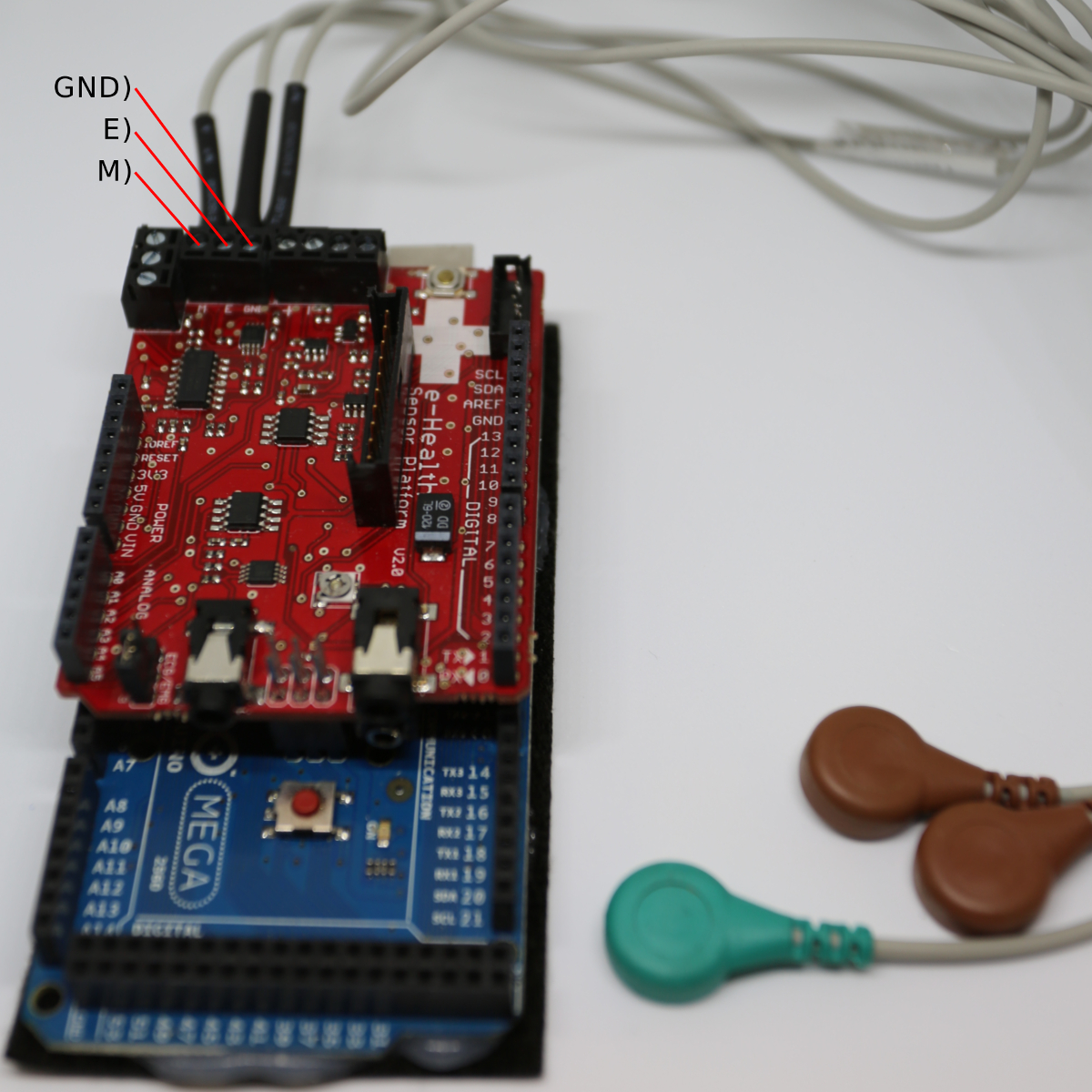
- Para construir o Bionic Clicker MK I, conecte o escudo de sensor de bio-sinais o microcontrolador e aparafuse os cabos de EMG os terminais de parafuso E, M e GND do escudo (ver Figura 4). Vá para a etapa de 1.6.
-
Para construir o MK II, coloque uma fileira de três pinos de cabeçalho para o sensor de músculo na +, - e SIG furos (ver Figura 5), de cima e solda por baixo.
- Os pinos de cabeçalho 90 ° com um par de plyers Dobre na metade os pinos. Isto coloca os pinos na posição correta para o caso.
- Se usando o músculo abdutor do indicador como entrada, vá para a etapa 1.3, se não passar para a etapa 1.4.
-
Retire o cabo de referência preto curto o sensor do músculo.
- Corte os três cabos de EMG com um cortador de fio para executar a partir do pulso para as costas da mão. Tira a extremidade dos cabos de três EMG com um descascador de fios.
- Coloque a extremidade descascada do fio preto no buraco R e o fio azul no buraco E o fio vermelho no furo M do sensor muscular (Figura 5). Solde os fios no lugar na parte de baixo do sensor muscular. Mova-se para a etapa de 1.5.
-
Encaixe a duas almofadas do elétrodo na parte inferior do músculo sensor e um eletrodo no conector do cabo preto de referência.
- Enfiar o sensor de músculo para músculo selecionado com as almofadas de eletrodo e coloque o eléctrodo de referência preto em local apropriado.
-
Corte 8 fios de multi-thread de núcleo único com comprimento e tira cada extremidade: curto de 5 fios (7 cm) para executar a partir do microcontrolador para a placa de controle (vermelho, preto, verde, branco e azul) e 3 mais (cerca de 12 cm mas depende do tamanho do pulso) fios (vermelho, preto e verde) Corra de um lado do pulso para o outro.
Nota: Se colocar o sensor do músculo em um músculo diferente certifique-se de que os fios mais longos serão executado a partir do site do sensor de músculo para o site do microcontrolador sem fio.- Coloque os fios no microcontrolador pronto para solda: furo 2 fios vermelhos na 3V, 2 fios pretos para o buraco GND, o fio verde long no orifício A0, o fio azul curto no orifício 2, o fio branco no buraco 3 e o fio verde curto no buraco 5. Solde os fios no lugar na parte de baixo do microcontrolador.
- Solde a outra extremidade dos 3 fios longos para 3 soquetes de cabeçalho, na ordem: vermelho, preto, verde. Consulte a Figura 5. Se não utilizar o músculo abdutor do indicador prossiga para o passo 2.
-
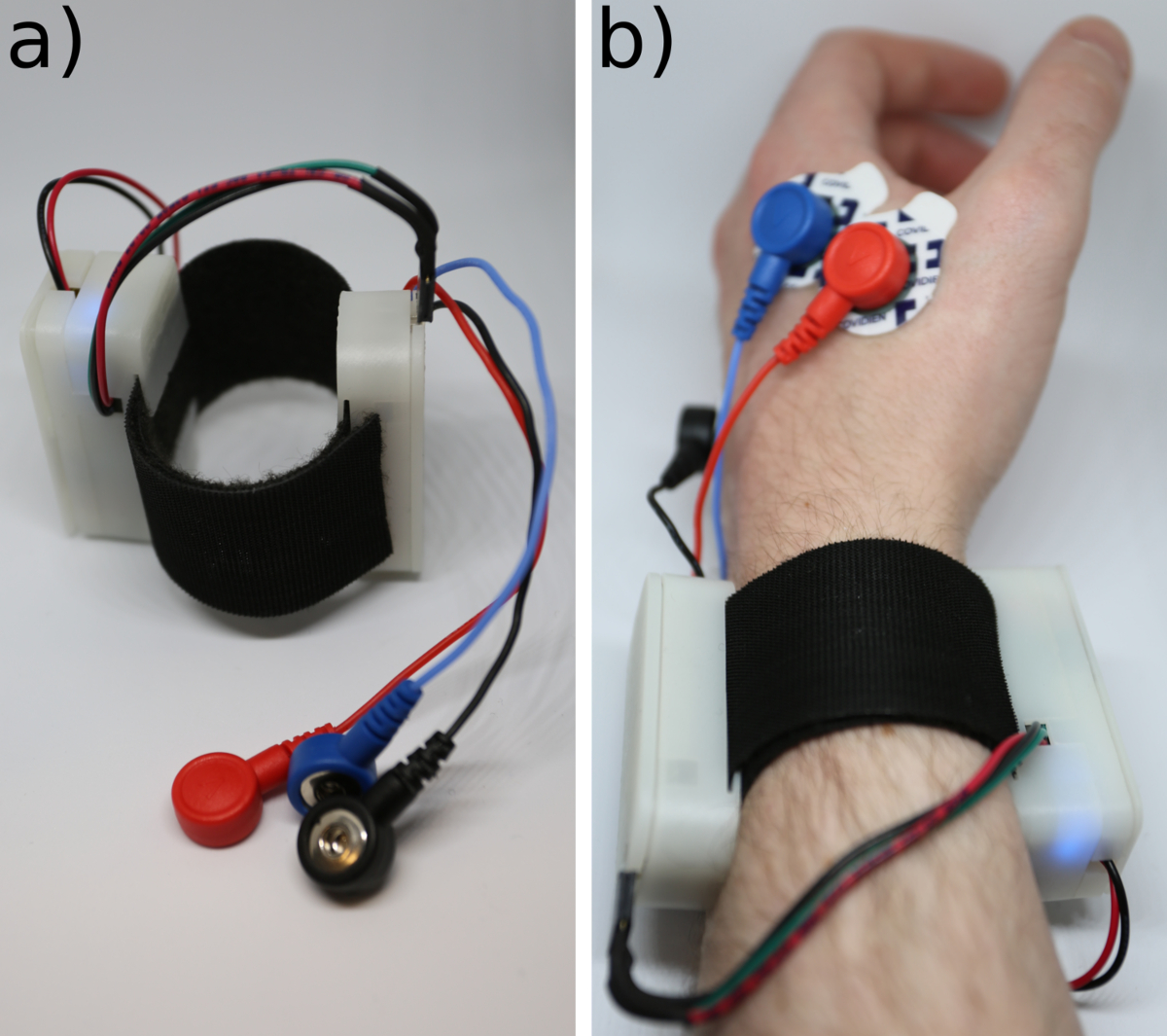
Coloque as almofadas de sensor de EMG na mão, como mostrado na Figura 6, com dois dos eletrodos em cada extremidade do músculo abdutor do indicador e um bloco de sensor de EMG no meio das costas da mão.
- Clip as almofadas do eletrodo para a extremidade do conector dos cabos do sensor de músculo (empurrar caber). O clipe de azul e vermelho eletrodos acima do músculo, os clipes de eletrodo preto nas costas da mão.
2. teste EMG saída
- Baixe a biblioteca para o escudo de bio-sinais seguindo o link14 da seção de referência. Descompacte-o e coloque-o na pasta de bibliotecas de desenvolvimento integrado (IDE) (geralmente encontrada em bibliotecas de documentos/Arduino). Continue para o passo 2.3. Se construindo o MK II, prossiga para a etapa 2.2.
- Adicione as placas do microcontrolador para o IDE, seguindo as instruções de15.
- Download 'ThresholdTest.ino' para o MK I ou 'BLEThresholdTest.ino' e 'BluefruitConfig.h' para o MK II e aberto no software IDE (arquivos suplementares).
- Desconecte o notebook da tomada e então e só então, conecte o microcontrolador o laptop através de um cabo de barramento Serial Universal (USB).
- Carregar a versão relevante do teste de limiar para o microcontrolador e, em seguida, abra o monitor serial (Ferramentas > Monitor Serial). A saída do EMG agora será exibida.
- Mover o dedo indicador de um lado para o outro e movimentar a mão sem mover o dedo indicador. Anote os valores exibidos em cada caso.
Nota: Quando usar o MK II certifique-se de que os cabos não mover como é extremamente sensível ao ruído gerado desta forma. - Selecione um valor que está acima o que é visto quando a mão é movido ao redor, mas abaixo do que é visto quando o dedo é movido de um lado para o outro. Anote esse valor.
Nota: O valor é selecionado para que o dispositivo será ativado apenas por um movimento proposital do dedo. Este é o valor de gatilho de limite, o valor no qual o dispositivo será ativado. O sensor de músculo tem uma configuração de ganho que pode ser alterada manualmente se o valor de limiar é difícil de encontrar. Os eléctrodos podem precisar de ser substituído. Se usando o músculo abdutor do indicador, defina o ganho mínimo como ponto de partida. O ajuste de ganho é alterado pelo potenciômetro no sensor marcado pelo ganho muscular, e isso pode ser alterado por uma pequena chave de fenda de cabeça chata.
3. teste limiar
- Download 'BoomTest.ino' para o MK I ou 'BLEBoomTest.ino' e BluefruitConfig.h para o MK II e abri-lo no software IDE.
- Edite o código fornecido, substituindo 'PLACE_YOUR_THRESHOLD_TRIGGER_VALUE_HERE' com o valor de gatilho de limiar determinado anteriormente na etapa 2.8. Esta é a linha 37 do código para o MK I e linha 47 do código para o MK II.
- Carregar a versão correta do BoomTest para o microcontrolador e em seguida, abra o monitor serial (Ferramentas > Monitor Serial).
- Mover a mão ao redor (não mover o dedo indicador de um lado para o outro); Nada é visto na saída serial.
- Mover o dedo indicador de um lado para o outro; a palavra 'BOOM' aparece.
Nota: Se o 'BOOM' aparece na hora errada ou não em todos, verifique as ligações e voltar para etapa 2.7.
4. 3D impressão caso o MK II
- Se construindo o MK II, baixar os arquivos de stl para todos os 5 componentes do caso (veja a Figura 7 para todas as 5 partes). Imprima as partes do caso por qualquer método preferido. Siga para o passo 5.2. Caso construindo o MK eu, passe para a seção 5.
Nota: O caso tem sido imprimido com êxito por ambos deposição fundida modelagem16 (FDM) e fotolitografia impressoras17.
5. Solde a placa de controle
Nota: Se construindo o MK II, prossiga para a etapa 5.2.
-
Coloque uma fileira de dois pinos de cabeçalho, cinco 10 resistores KΩ, um interruptor deslizante e dois interruptores de tecla para os componentes como mostrado na Figura 8A; Depois solda-los no lugar na parte inferior da placa.
- Quebre as faixas de cobre na placa tira por através de corte com uma faca de ofício, seguindo as linhas cinzas na Figura 8A. Isto permite faixas individuais têm várias funções através da placa.
- Corte 7 fios (preto, vermelho, azul, laranja, branco, marrom e amarelo) do comprimento correto com um cortador de fio, para que eles vão correr do antebraço para a parte superior do braço (cerca de 30 cm). Corte um fio vermelho de 7 cm, um fio preto de 3 cm e uma laranja e um fio azul de 4 cm.
- Tira as duas extremidades dos fios com um descascador de fios.
- Coloque os fios no painel de controle, seguindo o esquema de circuito mostrado na Figura 9; solde os fios no lugar na parte de baixo.
- Solde os fios vermelhos e pretos para um par de pinos de cabeçalho e em seguida solde os outros fios longos para uma faixa de pinos de cabeçalho, na ordem: azul, laranja, branco, marrom, amarelo.
- Solde a 5V e pinos GND do módulo sem fio para os pinos de cabeçalho no quadro de comando.
- Solde o fio laranja curto com o pino 2 do módulo de comunicação sem fio e o fio azul curto com pino 3.
-
Lugar três 10 resistores KΩ, um interruptor deslizante e empurrar dois botão switches conforme mostrado na Figura 10A e solda-los no lugar na parte inferior da placa.
- Quebre as faixas de cobre na placa tira por através de corte com uma faca de ofício, seguindo as linhas cinzas na Figura 10A. Isso permite que a faixa ter várias funções a bordo.
- Corte os fios que anteriormente foram soldados para o microcontrolador com um cortador de fio, para que eles possam correr através da camada meada do caso do microcontrolador para o quadro sem parar o caso de fechar (Figura 10B).
- Coloque os fios no painel de controle, seguindo o esquema de circuito (Figura 11). Solde os fios no lugar. Siga para o passo 6.2.
6. Monte o Clicker e atualizar o microcontrolador
- Volte a montar o Clicker Bionic, conectando os conectores de cabeçalho do controle de placa de fios para o microcontrolador e bio-sinais escudo (5V e GND sobre o MK eu, pino 22-30 MKII). Ligue a bateria para o microcontrolador. Veja a Figura 12. Passar à etapa 6.3.
- Volte a montar o Clicker Bionic, se o conector do cabeçalho do microcontrolador para o sensor do músculo (fio verde para SIG). Consulte a Figura 13.
- Conecte o microcontrolador ao laptop via cabo USB.
- Baixar 'BionicClicker.ino' ou ' BLEBionicClicker.ino e BluefruitConfig.h e abri-lo no software IDE.
- Editar o código e substitua o valor de gatilho de limiar determinado na etapa 2.7 'PLACE_YOUR_THRESHOLD_TRIGGER_VALUE_HERE' (na linha 59 do código para o MK, linha 83 do código para o MK II).
Nota: O nome que o dispositivo de MK II aparece como quando conectando via sem fio pode ser alterado editando linha 47 do código. Substitua 'Bionic Clicker MK II' um título alternativo. - Desconecte o microcontrolador o laptop, removendo o cabo USB.
7. conectar o dispositivo a um computador
- Se usando o MK eu, siga as instruções para emparelhar o módulo sem fio para o dispositivo seguindo guia18 as indicações do fabricante. Se utilizar o MK II, ligue para o dispositivo sem fio, seguindo o procedimento para conectar um teclado sem fio para o computador sendo usado.
8. teste o Clicker
-
Abra algum software de digitação e digite algum texto, tais como 'Lorem ipsum dolor sit amet'. Isso permite que as prensas ser percebida para testar se esses comandos são enviados e recebidos.
Nota: Se a bateria estiver baixa o dispositivo pode dar comportamento errático; use sempre uma bateria nova.- Pressione o botão de avanço manual para ver o cursor move para a frente e o manual do botão para trás para ver o cursor mover para trás. Levante o dedo indicador também seguir em frente.
- Para testar o controle remoto com o software de apresentação, levante o dedo indicador para avançar os slides.
Nota: A opção de substituir a função de EMG liga e desliga, e o manual para a frente e para trás botões progresso e retirar as lâminas em ambos os cenários.
9. Monte o Clicker
Nota: Se o edifício do MK II mova para etapa 9.2.
-
Se construindo o MK eu, cortar o verso gancho e laço material com uma tesoura, para que ele se encaixa confortavelmente em torno do pulso. Certifique-se que os laços estão enfrentando para dentro para não arranhar o pulso.
- Cortar o gancho de dupla face e loop material para que ele se encaixa confortavelmente em torno da parte superior do braço, novamente certifique-se que os loops face para dentro.
- Corte as tiras de velcro dupla face ao tamanho do microcontrolador (10 x 5 cm) e a placa de controle (2,5 cm x 6,4 cm). Corte uma tira que caiba firmemente em torno da bateria (4 x 12 cm).
- Usando a pistola de cola, cola o lado do laço das tiras até o fundo do microcontrolador e parte inferior do painel de controle.
- Fixe a placa de controle para a correia de pulso. Anexe o microcontrolador e a bateria para a alça superior do braço.
- Conecte tudo: The 9 V bateria pluga o microcontrolador com o conector de PP3. O escudo do microcontrolador e saúde conectar a placa de controle através dos fios soldadas.
Observação: O MK eu já está terminado.
-
Se construindo o MK II, corte verso velcro material 35 milímetros de largura e longo o suficiente para embrulhar ao redor do pulso (cerca de 22 cm para pulsos menores).
- Deslize o gancho e laço material através os clipes na parte inferior da caixa. Certifique-se de que os laços estão enfrentando para dentro para não arranhar o pulso.
- Conecte os fios soldados para o microcontrolador encerra no cabeçalho do sexo feminino para os pinos de cabeçalho masculino no sensor do músculo e encaixe os eletrodos nos cabos de EMG, empurrando-os.
Nota: O MK II está terminado. Ver Figura 14.
Resultados
O MK II é mais acessível, personalizável e menos pesado do que o MK eu dispositivo. Todo o que MK II custa apenas um pouco mais do que o escudo de bio-sinais sozinho (75 USD). O dispositivo é significativamente menor sentado no pulso, em vez do braço e o microcontrolador sem fio poderiam potencialmente simultaneamente apoiar entradas de 6 sensores de músculo. A autonomia funcional do MK eu dispositivo é menos de uma hora usando um 9 V 550 mAh bateria e a autonomia funcional do dispositivo MK II (quando usado como um clicker) é cerca de 8 horas usando uma bateria de mAh 3.7 V 150; consulte a tabela 1 para uma comparação entre os dispositivos.
O Bionic Clicker MK II pode ter um problema quando usado sobre o abdutor do indicador: o amplificador pode saturar e levar mais de um segundo para descarga (ver Figura 15). Cuidado, colocação de eletrodos e configurar corretamente o ganho pode superar esse problema. Isto não acontece com o Bionic Clicker MK-eu ou qualquer outro comumente usados músculos para EMG.
Enquanto calibrando os dispositivos para encontrar o valor de limite de gatilho, muitos valores diferentes podem ser observados. Eles caem em três escalas: os valores quando a mão estiver parado, os valores quando a mão está se movendo e os valores quando o dedo é movido. A tabela 2 mostra valores registrados em cada intervalo; para a papelaria e mão movendo intervalos, são mostrados os valores máximos e para o dedo enrijecer alcance o valor mínimo é mostrado. O valor de limiar é selecionado para mentir acima a mão que move o valor e abaixo o dedo enrijecer valor. Um valor mais perto a mão que move o intervalo aumenta a chance de falso positivo e reduz a possibilidade de falsos negativos, enquanto que um valor mais próximo ao dedo enrijecer gama tem o efeito oposto.
Ambos os dispositivos quando testado para falsos negativos e falsos positivos quando enrijecer o músculo de índices do raptor. Um falso negativo foi gravado quando o dispositivo não desencadear uma mudança de slide com estiramento do músculo e um falso positivo foi gravado se o slide alterado quando não enrijecer ocorreu. Nenhum dispositivo tive um problema com falsos positivos, embora o dispositivo MK II experimentou o ocasional falso negativo (menos de 5% do tempo). O MK eu dispositivo experiências sem falsos positivos ou negativos durante os primeiros 45 minutos de operação, embora o número de falsos negativos aumenta rapidamente até a falha total do dispositivo entre 50 minutos e uma hora (ver quadro 3).
Esses resultados mostram que o dispositivo êxito em seus objetivos. A tabela 1 mostra que o MK II é mais barato e tem mais flexibilidade do que o MK I. tabela 2 e tabela 3 mostram que as funções do dispositivo que se destina e podem ser usadas como um dispositivo baseado em EMG gatilho. Figura 15 mostra os problemas que podem ocorrer se utilizar o músculo abdutor índices: este não é um problema que ocorre com a maioria dos músculos e pode ser corrigido alterando o ganho. Embora os dispositivos têm algumas questões, eles são suficientes para o uso pretendido.

Figura 1: O biônico Clicker MK I. Isto mostra o Clicker Bionic MK, eu e todos os seus componentes montados no braço esquerdo. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 2: Diagrama de blocos dos dispositivos. Cada caixa representa uma seção separada do dispositivo; dentro de cada caixa é a funcionalidade que seção tem como parte do dispositivo. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 3 : Passos para construir o dispositivo. Um diagrama de fluxo que contém uma visão geral de alto nível de cada etapa do protocolo. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 4 : MK inicial eu montagem. Microcontrolador com os cabos de escudo e eletrodo de bio-sinais. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 5: Montagem inicial MK II. Microcontrolador com o sensor de músculo e conexões soldáveis. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 6 : Eletrodo colocação. Esta figura mostra a colocação dos eletrodos na mão quando usando o abdutor do indicador. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 7 : Peças casos o MK II. As partes do caso MK II pronto para impressão em uma impressora de fotolitografia. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 8 : O MK que o circuito de controle. (uma) placa de circuito acima (marcas cinza onde a placa de tira tinha contatos quebrados na parte de baixo). (b) concluída a placa de circuito. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 9 : O MK, eu controlo o diagrama de circuito da placa. O diagrama de circuito para o MK eu controlar a placa mostrando as conexões entre os resistores, interruptores e fios. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 10 : O MK que o circuito de controle. (uma) placa de controle acima (marca cinza onde a placa de tira tinha contato quebrado na parte de baixo). (b), placa de circuito Completed clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 11: Diagrama de circuito da placa de controle o MK II. O diagrama de circuito para o MK eu controlar a placa mostrando as conexões entre os resistores, interruptores e fios. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 12 : O montado i MK. Isso mostra todos os componentes do MK eu dispositivo antes de eles foram montados no braço. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 13 : Montar o Clicker MK II. (um) lugar do microcontrolador no fundo da caixa. (b) Coloque a bateria na seção média e coloque a tampa. (c) Coloque o sensor de músculo, no seu caso e coloque a tampa. (d) Ligue o microcontrolador para o sensor de músculo e a bateria para o microcontrolador. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 14 : O concluído Bionic Clicker MK II. (um) na faixa de velcro. (b) no pulso. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 15: Supersaturação do sensor muscular. Esta figura mostra o que acontece quando o sensor de músculo é saturado; os planaltos são quando ativação muscular era demasiado forte para a atual configuração de ganho no dispositivo. Clique aqui para ver uma versão maior desta figura.
{kind=link}
| MK EU | MK II | |
| Sensor de EMG | Geral Bio-sensor | Sensor de músculo dedicado |
| Sem fio | Módulo sem fio separado | A bordo do microcontrolador |
| EMG sobre wireless? | Não | Sim |
| Bateria | 9 V PP3 | 150 mAh LiPo |
| Tempo operacional | 1 h | 8 h |
| Tempo de construir | 5 h | 4 h |
| Custo total | US $150 | US $80 |
| Falsos positivos (%) | 0 | 0 |
| Falsos negativos (%) | 0 | 4.7 |
Tabela 1: comparação dos dispositivos. Esta tabela compara os vários aspectos dos dispositivos, desde a concepção à funcionalidade.
| Estacionária (máximo) | Mudança de mão (máximo) | Tensing dedo (mínimo) | Valor limite | |
| MK EU | 25 | 35 | 215 | 200 |
| MK II | 40 | 280 | 460 | 400 |
Tabela 2: resultados de calibração. Esta tabela mostra os valores obtidos, mantendo a mão estacionária, movendo a mão e o dedo enrijecer, bem como o valor de limiar selecionado.
| Número de falsos negativos (testado a cada 30 s) | Número de falsos positivos (ativações espontâneas) | ||||
| Primeiro 45 min | 45 min - 1 h | 1-8 h | Primeiro h | 1-8 h | |
| MK EU | 0 | 35 | N/A | 0 | N/A |
| MK II | 4 | 1 | 40 | 0 | 0 |
Tabela 3: teste dos dispositivos. Comparação de falsos positivos e falsos negativos entre os dois dispositivos.
Arquivos de código complementar para MK I e MK II:
Por favor clique aqui para baixar o "BionicClicker.ino"
Por favor clique aqui para baixar o "BLEBionicClicker.ino".
Por favor clique aqui para baixar o "BLEBoomTest.ino".
Por favor clique aqui para baixar o "BLEThresholdTest.ino".
Por favor clique aqui para baixar o "BoomTest.ino".
Por favor clique aqui para baixar o "ThresholdTest.ino".
Por favor clique aqui para baixar "Feather-Featherbase.stl".
Por favor clique aqui para baixar "Feather-Feathermid.stl".
Por favor clique aqui para baixar "Feather-Feathertop.stl".
Por favor clique aqui para baixar "Myo-Myobase.stl".
Por favor clique aqui para baixar "Myo-Myolid.stl".
Discussão
A saturação do MK II quando usado sobre o abdutor do indicador é menos de um problema de ele aparecer primeiro de maio. Cuidado de colocação dos eléctrodos e correto ganhar esta configuração para de ser um problema quando o dispositivo é usado como um controle remoto. A menos que o interessado em gravar com precisão a atividade dos índices Raptor, é improvável que seja um problema em tudo. Sem saturação excessiva tem sido vista em qualquer outro músculo, depois que o ganho foi definido. Os falso-negativos com o MK II são devido à dificuldade de selecionar o valor de limiar adequado quando usando o abdutor do indicador. Com músculos maiores, a diferença entre a magnitude de ativação não-intencional do músculo e enrijecer proposital do músculo é maior, permitindo a seleção de um ponto limite que está mais longe o falso-positivos e falso-negativos pontos. Em especial as pequenas mãos músculo abdutor do indicador pode ser pequeno demais para os eletrodos ser colocado corretamente (embora com menores almofadas do elétrodo isso potencialmente poderia ser resolvido).
A vida da bateria consideravelmente mais longa para o MK II é útil para uma variedade de razões. Em primeiro lugar, o MK eu dispositivo começou a agir erraticamente após 45 minutos de uso, então não pode ser usado para mais demonstrações. Em segundo lugar, com uma autonomia de várias horas, o MK II pode ser considerado como um controle de entrada para um dispositivo útil, e com apenas um pequeno aumento no tamanho físico da bateria, poderia ser usado como um dispositivo de monitorização durante todo o dia. O microcontrolador sem fio tem 6 entradas analógicas e 13 entradas digitais; Isto significa que o dispositivo poderia aceitar os sinais de vários sensores de músculo para criar um dispositivo com mais graus de liberdade em entradas de controle. Também deve ser notado que o sensor de músculo poderia ser substituído por qualquer biosensor com uma saída analógica para criar um dispositivo que utiliza outros sinais biológicos como entrada. O código do dispositivo também pode ser facilmente modificado para alterar a sua funcionalidade. Mudanças para o software e o hardware do dispositivo permitem modificações simples e variadas para o dispositivo.
Uma limitação do dispositivo actual é que a saída de EMG não pode ser enviada sem fio a uma taxa de dados alta como este pode sobrecarregar o buffer do microcontrolador sem fio. Outra limitação é que a técnica usa os índices de raptor como entrada, e como o músculo é muito pequeno, o espaçamento dos eletrodos na mão quase se sobrepõem; Se alguém tiver mãos particularmente pequenas, pode ser impossível colocar os eletrodos corretamente sobre este músculo.
O dispositivo tem várias vantagens sobre os dispositivos mais caros quando se trata de flexibilidade em potenciais projetos de pesquisa. É de baixo custo: o dispositivo custa 80 USD e canais de EMG adicionais só custam 35 USD, tornando-a ideal para menores ou projetos de estudantes. É fácil de personalizar, o software pode ser facilmente editado e as entradas se mudou para outro hardware. Tem um tamanho pequeno, para que uma pessoa a usá-lo não precisa carregar equipamentos pesados ou volumosos. Ele também aparece como um teclado sem fio com outros dispositivos, então ele pode ser facilmente integrado com qualquer dispositivo sem fio compatível. O dispositivo já foi incorporado em um dispositivo de apoio que será publicado no próximo-futuro.
Devido ao tamanho e facilidade de personalização do MK II, já está sendo considerado para incorporação em vários projetos de pesquisa como um módulo sem fio do EMG e como um mecanismo de gatilho sem fio. Ele também está sendo usado como a Fundação de uma das sessões de laboratório no curso de um aluno mestre. A principal melhoria que gostaríamos de fazer para o dispositivo é aumentar a taxa de transmissão sem fio; o objetivo é alcançar 10 Hz, e se isto será feito através de hardware ou software ainda está para ser determinado.
Os passos mais críticos dentro do protocolo são passos 2.6 e 2.7: a seleção do valor limiar de gatilho. Na etapa 2.6, atenção especial precisa ser pago para o movimento dos cabos de EMG, como estes podem atuar como antena e gerar artefatos de movimento; no entanto, se estas são mantidas estacionárias isto não é um problema. Na etapa 2.7, se o valor selecionado é muito alto, isso resulta em falso-negativos. Se este valor for muito baixo, isso resulta em falsos positivos. No caso do abdutor do indicador, é muito difícil encontrar um valor que não implique o ocasional falso negativo, embora com músculos maiores isso não parece ser um problema. Se encontrar o valor correto, ainda é um problema, o ganho pode ser corrigido por defini-lo como o valor mínimo e aumentá-la até uma grande diferença entre não-ativação e ativação é vista através da leitura da série, com os valores ficar abaixo do ponto de saturação.
Em geral o MK II é uma melhoria considerável sobre o MK eu como um dispositivo de pesquisa potencial, embora porque o MK I tem um forte impacto visual, é provável que ainda seja usado eventos de engajamento público no futuro.
Divulgações
Os autores não têm nada para divulgar.
Agradecimentos
O projeto é financiado pela engenharia e EPSRC de Conselho de pesquisa de ciências físicas (EP/K503745/1), Instituto Nacional de saúde pesquisa (NIHR) centro de pesquisa biomédica (BRC) (BRC272/HI/JG/101440) e a UCL mudança fabricantes.
Materiais
| Name | Company | Catalog Number | Comments |
| For the Mark I | |||
| Equipment | |||
| Laptop | Any laptop with USB | ||
| USB B cable | From laptop to USB-B connection on Arduino | ||
| Soldering Station | |||
| Solder | |||
| Hot glue gun | |||
| Hot glue gun glue | |||
| Items | |||
| Small Single-Core Multi-thread Wires | Black, Red, Yellow, Brown, Orange White, Blue, | ||
| Arduino MEGA 2560 | Arduino | Arduino MEGA 2560 | (Geniuno MEGA 2560 outside US) |
| E-Health Shield v2.0 | Cooking Hacks | e-Health Sensor Shield V2.0 for Arduino, Raspberry Pi and Intel Galileo [Biometric / Medical Applications] | |
| EMG cables | Cooking Hacks | Electromyography Sensor (EMG) for e-Health Platform [Biometric / Medical Applications] | |
| EMG Electrodes | Sparkfun | SEN-12969 | |
| 9V battery | Any | ||
| Power cable | PP3 9v connector with jack | ||
| Bluefruit EZ-KEY HID | Adafruit | 1535 | |
| strip board | Amazon.co.uk | Small Stripboard 25 X 64mm Pack of 3 | any similiar stripboard 2.54mm pitch 7x25 |
| push button switch | COM-00097 | ||
| slide switch | amazon.com | 20 Pcs On/Off/On DPDT 2P2T 6 Pin Vertical DIP Slide Switch 9x4x3.5mm | |
| resistors | COM-11508 | ||
| Double sided Velcro | |||
| Break Away Headers - Straight | Sparkfun | PRT-00116 | 2, 2 and 5 needed |
| For the Mark II | |||
| Equipment | |||
| Laptop | Any laptop with USB connection | ||
| USB micro cable | From laptop to USB micro (standard phone connector style) | ||
| Soldering Station | Any | ||
| Solder | |||
| Items | |||
| Small Single-Core Multi-thread Wires | Black, Red, Green, White, Blue, | ||
| Feather BLE 32U4 | Adafruit | 2829 | |
| MyoWare | Sparkfun | SEN-13723 | |
| EMG cables | Sparkfun | CAB-12970 | |
| EMG electrodes | Sparkfun | SEN-12969 | |
| 3.7 V LiPo | Adafruit | 1317 | |
| Strip Board | amazon.co.uk | Small Stripboard 25 X 64mm Pack of 3 | 2.54 pitch 7x9 rows |
| Push Button switch | COM-00097 | ||
| slide switch | amazon.com | 20 Pcs On/Off/On DPDT 2P2T 6 Pin Vertical DIP Slide Switch 9x4x3.5mm | |
| resistors | COM-11508 | ||
| 3D printed parts | Can be 3D printed yourself or printed from a website | ||
| Double sided Velcro | |||
| Break Away Headers - Straight | Sparkfun | PRT-00116 | 3 pins needed |
| Female Headers | sparkfun | PRT-00115 | 3 pins needed |
Referências
- Navarro, X., Krueger, T. B., Lago, N., Micera, S., Stieglitz, T., Dario, P. A critical review of interfaces with the peripheral nervous system for the control of neuroprostheses and hybrid bionic systems. J Periph Nerv Syst. 10 (3), 229-258 (2005).
- Yang, D. P., et al. An anthropomorphic robot hand developed based on underactuated mechanism and controlled by EMG signals. J Bionic Eng. 6 (3), 255-263 (2009).
- Chu, J. U., Moon, I., Lee, Y. J., Kim, S. K., Mun, M. S. A supervised feature-projection-based real-time EMG pattern recognition for multifunction myoelectric hand control. IEEE/ASME Trans Mechatronics. 12 (12), 282-290 (2007).
- Bitzer, S., Van Der Smagt, P. Learning EMG control of a robotic hand: towards active prostheses. Proceedings 2006 IEEE International Conference on Robotics and Automation. , Orlando, Florida. (2006).
- Cipriani, C., Zaccone, F., Micera, S., Carrozza, M. C. On the shared control of an EMG-controlled prosthetic hand: analysis of user-prosthesis interaction. IEEE Trans Rob. 24 (1), 170-184 (2008).
- Tenore, F., Ramos, A., Fahmy, A., Acharya, S., Etienne-Cummings, R., Thakor, N. V. Towards the control of individual fingers of a prosthetic hand using surface EMG signals. IEEE EMBS. 2007, 6145-6148 (2007).
- Reinvee, M., Pääsuke, M. Overview of Contemporary Low-cost sEMG Hardware for Applications in Human Factors and Ergonomics. In Proc Hum Fact Ergon Soc Annu Meet. 60 (1), 408-412 (2016).
- George, P. K., Minas, V. L., Agisilaos, G. Z., Christoforos, I. M., Kostas, J. K. Open-Source, Anthropomorphic, Underactuated Robot Hands with a Selectively Lockable Differential Mechanism: Towards Affordable Prostheses. 2015 IEEE/RSJ International Conference of Intelligent Robots and Systems. , Hamburg. (2015).
- Agisilaos, G. Z., Minas, V. L., Christoforos, I. M., Kostas, J. K. Open-Source, Affordable, Modular, Light-Weight, Underactuated Robot Hands. IEEE/RSJ International Conference of Intelligent Robots and Systems. , Chicago, Illinois. (2014).
- Minas, V. L., Agisilaos, G. Z., Melina, N. B., Kostas, J. K. Open-Source, Low-Cost, Compliant, Modular, Underactuated Fingers: Towards Affordable Prostheses for Partial Hand Amputations. 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. , Chicago, Illinois. (2014).
- Engaging the senses: object-based learning in higher education. Chatterjee, H. J., Hannan, L. , Ashgate Publishing, Ltd. (2015).
- Zainee, N. M., Chellappan, K. Emergency clinic multi-sensor continuous monitoring prototype using e-Health platform. 2014 IEEE Conference on Biomedical Engineering and Sciences (IECBES). , Kuala Lumpur. (2014).
- Paul, P., Motskin, M. Engaging the Public with Your Research. Trends Immunol. 37 (4), 268-271 (2016).
- e-Health Sensor Platform V2.0 for Arduino and Raspberry Pi. , Available from: https://www.cooking-hacks.com/documentation/tutorials/ehealth-biometric-sensor-platform-arduino-raspberry-pi-medical#step3_1 (2017).
- Arduino IDE Setup. , Available from: https://learn.adafruit.com/add-boards-arduino-v164/setup (2017).
- Ultimaker 2+. , Available from: https://ultimaker.com/en/products/ultimaker-2-plus (2017).
- Form 2. , Available from: https://formlabs.com/3d-printers/form-2/ (2017).
- Pairing to Bluefruit. , Available from: https://learn.adafruit.com/introducing-bluefruit-ez-key-diy-bluetooth-hid-keyboard/pairing-to-bluefruit (2017).
Reimpressões e Permissões
Solicitar permissão para reutilizar o texto ou figuras deste artigo JoVE
Solicitar PermissãoThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados