
Method Article
슈퍼맨 식자 마크 I & II
요약
장치 누워 관객 들에 게 전도 기반 컨트롤을 설명 하기 위해 만들었습니다. 초기 장치의 성공 이후 두 번째 장치 유연성 데모 및 연구 목적에 대 한 기능에 되었다. 이 프로토콜 구축 하 고 두 장치를 보정 하는 과정을 설명 합니다.
초록
이 원고에서는 두 ' 슈퍼맨 식자 ' 시스템 소개 첫 번째 전도 (EMG) 기반 제어 시스템 교육 목적 및 연구 목적에 대 한 두 번째 보여 주기 위해 설계 되었습니다. EMG 기반 제어 시스템 근육 활성화에 의해 생성 된 전기 신호를 선택 하 고 컨트롤러에 대 한 입력으로 사용. EMG 컨트롤러 제어 사지에 보 철에 널리 사용 됩니다.
마크 나 (MK I) 식자 수 그들의 집게 손가락을 올려서 한 프레 젠 테이 션의 슬라이드를 변경 하려면 착용. 그것은 마이크로컨트롤러 및 바이오 신호를 본따서 방패. 그것은 모두 대중의 관심과 연구 공동체를 많이 생성.
여기에 제시 된 마크 II (MK II) 장치, 세련 된, 저렴 하 고 더 많은 사용자 정의 시스템을 쉽게 수정할 수 있습니다 직접 EMG 데이터를 전송 하도록 설계 되었습니다. 그것은 무선 가능 마이크로컨트롤러와 근육 센서를 사용 하 여 만들어집니다.
서문
재활 공학 및 보조 기술에 대 한 열망 센터 조사 기법을 적용 하 고 관련 관심 분야의 뇌졸중, 근이 영양 증, 하 되이 국한 되지 않음 등 다른 도메인 간에 양도 절단, 고령 화 인구 고 전문 기술 교육. 한 연구 분야의 중심에 관련 된 neuroprosthesis입니다. Neuroprosthetic 팔의 제어에 사용 되는 많은 기술의 EMG 제어 시스템1,2,3,4,,56에 대 한 가장 일반적인 입력 중 하나입니다. 이것은 다른 제어 시스템7에 비해 경제성 및 사용의 용이성 때문에 큰 부분 에서입니다. 최근 개발 3D 인쇄 무생물 같은 제어8,,910의이 유형을 사용할 때 보 손만 1000 달러를 요할 수 있다. 그러나, 대 중에 게 이러한 시스템을 설명 하려고 할 때 수족의 도움 없이 이렇게 쉬운 방법이입니다.
공중의 일원에 게이 분야에서 연구 활동의 인식을 높이기 위해, 슈퍼맨 식자 데모 장치 개발 되었다. 그것은 매우 주목 하 고 학습 및 이해11가르쳐 주제의 개체 기반 데모를 사용 하는 것이 중요. 뿐만 아니라 우리의 장치에 현재 기술 개발의 현대 지식의 증가 뿐만 아니라 EMG의 개념을 가르치는 데 도움이 됩니다. 또한, 그것은 과학, 기술, 공학 및 수학 (줄기)의 영역 내에서 연구를 선택 하는 젊은 세대를 고무 시킨다.
슈퍼맨 식자 MK 나는 실험실 내에서 사용에 이미 있던 쉽게 사용할 수 있는 부품을 사용 하 여 만들어졌다. 마이크로컨트롤러, 바이오 신호 방패12, 전극, 컨트롤 보드, 무선 통신 보드 및 9 V 배터리를 그것에 의하여 이루어져 있다. 장치는 검지와 엄지 사이 위치한 납치범 indicis 근육의 활동을 따기로 작용 했다. 그것은 키보드를 흉내 낸 고 미리 임계값에 도달 했습니다 때마다 '오른쪽 키'를 전송 하 여 슬라이드 변경을 트리거합니다. 컨트롤 보드 (진행 슬라이드와 슬라이드 후퇴) '권리'와 '왼쪽' 키 수동 전송 허용 하 고 또한 라이브 데모 중 일 잘못 하는 경우 EMG 입력을 무시 하는 데 사용할 수 있습니다.
의학 물리학 및 공학 부 공공 참여 활동의 일환으로, 우리는 공중의 일원에 게 슈퍼맨 식자 증명 하고있다. 그것은 관객에서 열광적인 반응을 받았다 고 여러 협력을 시작에 관심을 생성. 초기 장치의 성공 후 디바이스의 두 번째 버전은 설계 되었습니다.
두 번째 장치 디자인에 대 한 목표는 저렴, 덜 복잡 하 고 첫 번째 장치 보다 더 많은 사용자 정의 장치를 생산 했다. 이 장치의 목적은 뭔가 학생 프로젝트에 쉽게 수정할 수 있고 싸게 기존 프로젝트에 통합을 설계 했다. 다른 사용 가능한1,2,3,4,,56 의 용이성은이 소자의 주요 장점은 작은 크기를 사용 하 고 저렴 한 비용. 슈퍼맨 리모콘 장치 다른 장치의 연구, 트리거 장치, 같은 해상도 없을 수 있습니다 비록 그들은 더 이상 충분. MK II 보 철 컨트롤러 또는 보조 장치 등의 장치를 실행 하는 EMG 임계값을 사용 하는 시스템을 위한 이상적인 기초 것입니다.
디자인 무선 호환 마이크로컨트롤러와 근육 센서 기반으로 했다. 그것은 또한 3.7 V 150 mAh 리튬 폴리머 배터리, 수동 제어 보드 및 3D 인쇄 케이스 포함. 그림 3 디자인의 차이점에 대 한 개요를 보여 줍니다. MK II 디자인 원본 장치와 같은 기본적인 기능을가지고 있지만 무선 EMG 모니터링 등 새로운 응용 프로그램에 대 한 훨씬 더 많은 잠재적인 기능이.
프로토콜
프로토콜 대학 대학 런던의 인간 연구 윤리 위원회의 지침을 따릅니다.
주의:이 프로토콜 포함 전기 위험 및 화상 위험 (납땜); 이 프로토콜을 시도 하기 전에 모두 읽기. 이 프로토콜 포함 피부에 장치를 연결 합니다. 한번도 거기 인지 확인 경로 피부와 전기 요점 사이. 결코 납땜의 요소를 터치 합니다. 족집게 또는 클램프가 열 될를 개최. 계속 사용 하는 동안 젖은 청소 스폰지. 항상 사용 하지 때에 그것의 스탠드에 납땜을 반환 합니다. 결코 벤치에 넣어. 장치를 해제 하 고 사용에 그것을 뽑습니다.
1. 기본 구성 요소를 조립
참고: 그림 3 프로토콜 단계에 대 한 높은 수준의 개요를 제공합니다.
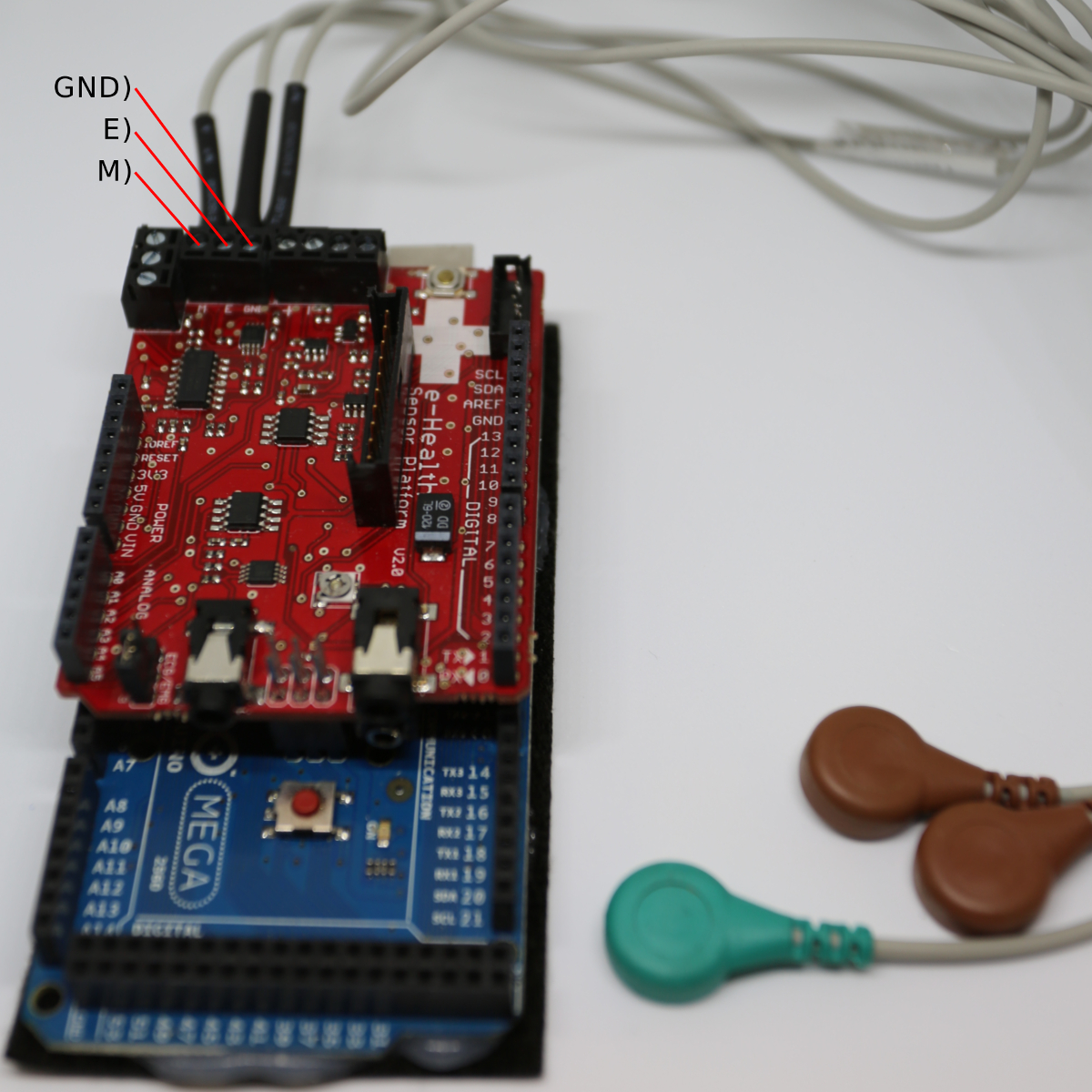
- 슈퍼맨 식자 MK를 구축 하려면, 마이크로컨트롤러에 바이오 신호 센서 방패를 연결 하 고 EMG 케이블 쉴드의 E, M 및 GND 스크류 터미널에 나사 ( 그림 4참조). 1.6 단계를 계속 합니다.
-
MK II를 빌드하려면 배치 3 개의 헤더 핀의 행에서 근육 센서에는 +,-그리고 시 그 위의 ( 그림 5참조)을 구멍 밑 땜 납.
- 헤더 핀 plyers의 쌍을 가진 90 ° 구부려 중간 고. 이 경우에 대 한 올바른 위치에 핀을 배치합니다.
- 입력으로 납치범 indicis 근육을 사용 하는 경우 1.3 단계 계속 아니라면 1.4 단계로 이동.
-
근육 센서에서 짧은 검은 참조 케이블을 제거 합니다.
- 손의 뒷면에는 손목에서 실행 하는 와이어 커터와 3 개의 EMG 케이블을 잘라. 와이어 스 트리 퍼와 3 개의 EMG 케이블의 끝을 스트립.
- 근육 센서 (그림 5)의 M 구멍에 R 구멍, 전자 구멍에 파란색 와이어 및 빨간 선으로 검은색 와이어의 벗겨진된 끝을 놓습니다. 근육 센서의 밑면에 전선 땜 납. 1.5 단계를 이동 합니다.
-
검은 참조 케이블의 커넥터에 근육 센서와 한 전극의 아래쪽에 두 개의 전극 패드를 클립.
- 스틱 전극 패드와 함께 선택 된 근육에 근육 센서 하 고 적절 한 장소에서 검은 참조 전극 배치.
-
8 단일 코어 멀티 스레드 와이어 길이를 잘라내어 각 끝을 스트립: 5 짧은 (손목 크기에 의존 하지만 약 12 cm)를 컨트롤 보드 (빨강, 검정, 녹색, 백색 및 파랑)와 3 이상 마이크로컨트롤러에서 실행 (7 cm) 전선 전선 (빨강, 검정 및 녹색) 다른 손목의 한쪽에서 실행 합니다.
참고: 다른 근육에 근육 센서를 배치 하는 경우 무선 마이크로컨트롤러 사이트에 더 이상 전선 근육 센서 사이트에서 실행 됩니다 있는지 확인 합니다.- 마이크로컨트롤러에 전선을 납땜 준비 장소: 2 빨간 전선은 3V에 구멍, GND 구멍, A0 구멍에 긴 녹색 와이어, 짧은 파란색 와이어를 2 구멍, 3 구멍으로 긴 철사 2 블랙 와이어 그리고 5 구멍에 짧은 녹색 와이어. 마이크로컨트롤러의 밑면에 전선 땜 납.
- 순서에서 3 헤더 소켓을 3 긴 전선의 다른 쪽 끝을 납땜: 레드, 블랙, 녹색. 그림 5를 참조 하십시오. 그렇지 않으면 2 단계 진행 납치범 indicis 근육을 사용 하 여.
-
그림 6, 납치범 indicis 근육의 양쪽 끝에 전극의 2 개에 손 등의 가운데 한 EMG 센서 패드와 같이 손에서 EMG 센서 패드를 놓습니다.
- 근육 센서 케이블 (푸시 적합)의 커넥터 끝에 전극 패드를 클립. 근육, 손의 뒷면에 검은 전극 클립 위에 파란색 및 빨간색 전극 클립.
2. 테스트 EMG 출력
- 링크14 참조 섹션에서 다음 바이오 신호 방패에 대 한 라이브러리를 다운로드 합니다. 그것을 압축 해제 하 고 (일반적으로 문서/라이브러리/Arduino에서에서 발견) 개발 IDE (통합) 라이브러리 폴더에. 2.3 단계로 진행 합니다. MK II를 구축 하는 경우 2.2 단계로 진행 합니다.
- 다음 지침15IDE를 마이크로컨트롤러 보드를 추가 합니다.
- 다운로드는 MK에 대 한 'ThresholdTest.ino' 나 또는 'BLEThresholdTest.ino' 및 'BluefruitConfig.h' MK II 및 IDE 소프트웨어 (추가 파일)에 오픈.
- 전원에서 노트북을 분리 한 다음, 그리고 유일한 후, 범용 직렬 버스 (USB) 케이블을 통해 노트북에 마이크로컨트롤러를 연결 합니다.
- 마이크로컨트롤러를 임계값 테스트의 관련 버전을 업로드 하 고 다음 직렬 모니터를 엽니다 (도구 > 시리얼 모니터). 이제는 EMG의 출력 표시 됩니다.
- 검지 손가락 측면에서 이동한 손 검지 손가락을 이동 하지 않고 이동 합니다. 각각의 경우에 표시 되는 값을 적어 둡니다.
참고: MK II를 사용 하 여 있는지 확인 하는 때 그것은이 방법으로 생성 하는 잡음에 매우 민감한 케이블 이동 하지 않습니다. - 무엇을 위에 볼 때 손을 이동은 하지만 무엇 아래 손가락 이동 측면에서 본은 값을 선택 합니다. 이 값을 적어 둡니다.
참고: 값은 선택 되므로 장치는 손가락의 목적이 있는 운동에 의해 활성화 될 것입니다. 임계값 트리거 값, 장치를 활성화 됩니다 값입니다. 근육 센서는 이득 설정 임계값 값은 하드를 찾을 경우 수동으로 변경 될 수 있는. 전극을 교체 해야 합니다. 납치범 indicis 근육을 사용 하는 경우 시작 점으로 최소 이득을 설정 합니다. 이득 설정 이득, 의해 표시 근육 센서에 포 텐 쇼 미터에 의해 변경 되 고이 작은 플랫 헤드 스크루 드라이버에 의해 변경 될 수 있습니다.
3. 테스트 임계값
- 다운로드는 MK에 대 한 'BoomTest.ino' 나 또는 'BLEBoomTest.ino' 및 BluefruitConfig.h MK ii IDE 소프트웨어에서 그것을 엽니다.
- 이전 단계 2.8에서에서 결정 하는 임계값 트리거 값을 'PLACE_YOUR_THRESHOLD_TRIGGER_VALUE_HERE'를 대체 하 여 제공 된 코드를 편집 합니다. 이것은 MK에 대 한 코드의 줄 37은 어 선 47 MK II에 대 한 코드의.
- 마이크로컨트롤러에 BoomTest의 올바른 버전을 업로드 한 다음 직렬 모니터를 엽니다 (도구 > 시리얼 모니터).
- (움직이지 않고 검지 손가락 측면에서); 주위에 손을 이동합니다 아무것도 직렬 출력에서 볼 수 있다.
- 이동 검지 손가락 측면; '붐' 이라는 단어가 나타납니다.
참고: '붐' 잘못 된 시간에 또는 천만 나타나면, 연결을 확인 하 고 다시 2.7 단계로 이동.
4. 3D 인쇄 MK II 케이스
- MK II를 구축 하는 경우는 케이스의 모든 5 구성 요소에 대 한 stl 파일을 다운로드 (모든 5 부품 그림 7 참조). 원하는 방법으로 케이스의 부분을 인쇄 합니다. 5.2 단계로 진행 합니다. 경우는 MK 건물, 이동 섹션 5.
참고: 경우에는 성공적으로 인쇄 되었다16 (FDM) 및 사진 평판 프린터17모델링 두 융합된 증 착에 의해.
5. 솔더 제어 보드
참고: MK II 건물, 5.2 단계로 진행 합니다.
-
두 헤더 핀, 5 10의 행 장소 k ω 저항, 슬라이딩 스위치와 그림 8A;와 같이 구성 요소에 대 한 2 개의 푸시 버튼 스위치 다음 그들을 보드의 밑면에 위치에 땜 납.
- 그림 8A에 회색 라인을 따라 공예 칼으로 통해 조각화 스트립 보드에 구리 트랙을 휴식. 전반적으로 여러 기능을 개별 트랙에 대 한 수 있습니다.
- 어퍼 암 (약 30 cm)를 팔 뚝에서 실행 됩니다 있도록 7 전선 (블랙, 레드, 블루, 오렌지, 화이트, 브라운 및 노란색) 와이어 커터와 올바른 길이 잘라. 7 cm, 3 cm와 오렌지의 검은색 와이어와 4 cm의 파란색 와이어의 빨간 와이어를 잘라.
- 와이어 스 트리 퍼와 전선의 양 끝을 스트립.
- 그림 9; 회로도 따라 제어 보드에서 전선 배치 아래쪽에 전선 땜 납.
- 헤더 핀의 쌍에 긴 빨간색과 검은색 전선을 납땜 하 고 다음의 순서로 헤더 핀 스트립에 다른 긴 와이어 솔더: 파란색, 주황색, 백색, 갈색, 노란색.
- 5V와 GND 핀 헤더 핀 컨트롤 보드에 무선 모듈의 땜 납.
- 무선 통신 모듈의 핀 2에 짧은 주황색 와이어와 핀 3 짧은 파란 선 땜 납.
-
3 10 k ω 저항, 슬라이딩 스위치와 2 개의 푸시 버튼 스위치 그림 10A와 같이 하 고 보드의 밑면에 장소로 그들을 솔더.
- 그림 10A에회색 라인을 따라 공예 칼으로 통해 조각화 스트립 보드에 구리 트랙을 휴식. 이 보드에 여러 기능을 트랙에 대 한 수 있습니다.
- 그들은 마이크로컨트롤러 케이스의 중간 계층을 통해 제어 보드를 (그림 10B) 닫을 경우 중지 하지 않고 실행 될 수 있도록 와이어 커터와 마이크로컨트롤러 이전 납땜 했다 철사를 잘라.
- 회로 다이어그램 (그림 11)에 따라, 제어 보드에서 와이어를 놓습니다. 장소에 전선 땜 납. 6.2 단계로 진행 합니다.
6. 리모콘 조립 및 마이크로컨트롤러를 업데이트
- 다시 슈퍼맨 리모콘 조립, 헤더 커넥터 연결 컨트롤에서 보드 마이크로컨트롤러에 전선 및 바이오 신호 방패 (5V와 GND는 MK에 나는 MKII에 핀 22-30). 마이크로컨트롤러에 배터리를 연결 합니다. 그림 12를 참조 하십시오. 6.3 단계로 이동 합니다.
- 다시 조립 슈퍼맨 리모콘, 마이크로컨트롤러에서 근육 센서 (SIG에 녹색 와이어) 헤더 커넥터를 연결 한다. 그림 13을 참조 하십시오.
- USB 케이블을 통해 노트북에 마이크로컨트롤러를 연결 합니다.
- 다운로드 'BionicClicker.ino' 또는 ' BLEBionicClicker.ino 및 BluefruitConfig.h IDE 소프트웨어에서 그것을 엽니다.
- 코드를 편집 하 고 단계 2.7에서에서 결정 하는 임계값 트리거 값 'PLACE_YOUR_THRESHOLD_TRIGGER_VALUE_HERE'를 바꿉니다 (59는 MK에 대 한 코드의 줄에, 라인의 코드 83 MK II에 대 한).
참고: 무선을 통해 연결할 때 MK II 장치는로 표시 되는 이름은 선 47의 코드를 편집 하 여 변경할 수 있습니다. '바이오 닉 식자 MK II' 대체 제목 바꿉니다. - USB 케이블을 제거 하 여 노트북에서 마이크로컨트롤러를 분리 합니다.
7. 컴퓨터에 장치 연결
- 경우, 제조업체의 가이드18에 따라 장치에 무선 모듈을 쌍으로 지침에 따라 사용 하는 MK. MK II를 사용 하 여 경우 사용 중인 컴퓨터에 무선 키보드를 연결 하려면 절차를 수행 하는 무선 장치에 연결 합니다.
8입니다. 테스트는 리모콘
-
일부 입력 소프트웨어를 열고 'Lorem ipsum 슬픔 앉아 amet' 같은 텍스트를 입력 합니다. 이러한 명령은 전송 및 수신 여부를 테스트 하려면 인식 될 프레스 수 있습니다.
참고: 배터리가 낮은 경우 장치를 제공할 수 있습니다 엉뚱한 행동; 항상 신선한 배터리를 사용 합니다.- 앞으로 수동 뒤로 버튼 뒤로 이동 하는 커서를 볼 수 이동 하는 커서를 볼 수동 앞으로 단추를 누릅니다. 또한 앞으로 이동에 검지 손가락을 올립니다.
- 프레 젠 테이 션 소프트웨어와 함께 식자를 테스트 하려면 슬라이드 진행에 검지 손가락을 올립니다.
참고: 재정의 스위치 EMG 기능 켜고 끕니다, 그리고 매뉴얼 앞으로 그리고 뒤로 진행 버튼 두 시나리오에서 슬라이드 후퇴.
9. 리모콘 탑재
참고: MK II 건물 9.2 단계로 이동 합니다.
-
MK를 구축 하는 경우 나, 이중 면 잘라 연결 하 고 손목 주위 편안 하 게 맞도록 재료가 위, 루프. 루프 하지 스크래치 손목 안쪽으로 직면 하는 것을 확인 하십시오.
- 이중 면 후크 및 위 팔 주위 편안 하 게 맞도록 자료를 반복, 다시 루프 얼굴 안쪽으로 다는 것을 확인.
- 마이크로컨트롤러 (10 cm x 5 cm) 및 제어 보드 (2.5 c m x 6.4 cm)의 크기에 이중 면 후크 및 루프 스트립을 잘라. 배터리 (4 x 12cm) 주위 밀접 하 게 맞는 것입니다 스트립을 잘라.
- 아 교 총을 사용 하는 마이크로컨트롤러의 아래와 제어 보드의 하단에 스트립의 루프 사이드 접착제.
- 손목 스트랩에 제어 보드를 연결 합니다. 팔 위쪽 스트랩에 마이크로컨트롤러와 배터리를 연결 합니다.
- 모든 것을 연결:이 9 V 배터리 p p 3 커넥터와 마이크로컨트롤러에 연결. 마이크로컨트롤러 및 e-건강 방패 납땜된 전선을 통해 제어 보드에 연결 합니다.
참고:는 MK 나는 지금 완료.
-
MK II 건물, 이중 면 후크 및 루프 소재 35 m m 넓고 충분히 (약 22 cm 작은 손목) 손목 주위에 포장을 잘라.
- 후크와 루프 소재 케이스의 아래쪽에 있는 클립을 통해 슬라이드. 루프 하지 스크래치 손목 안쪽으로 직면 하는 다는 것을 확인 하십시오.
- 근육 센서의 남성 헤더 핀으로 여성 헤더에 종료 하는 마이크로컨트롤러에 납땜 하는 와이어를 연결 하 고 그들을 추진 하 여 전극에 EMG 케이블 클립.
참고: MK II 이제 완료 되었습니다. 그림 14를 참조 하십시오.
결과
MK II는 더 적당 하 고, 사용자 정의 MK 보다 덜 성가신 나 장치. MK II는 약간 비용 전체 바이오 신호 쉴드 혼자 (75 달러) 보다 더. 장치는 팔과 무선 마이크로컨트롤러 잠재적으로 동시에 6 근육 센서에서 입력 지원 보다 훨씬 작은 손목에 앉아. MK의 기능 배터리 나 장치가 바로 아래 한 시간 사용 하는 9 V 550 mAh 배터리 및 (해당 되는 경우에 리모콘 사용) MK II 장치의 기능 배터리는 3.7 V 150 mAh 배터리;를 사용 하 여 약 8 시간 장치 비교 표 1 을 참조 하십시오.
슈퍼맨 식자 MK II 납치범 indicis에 사용 될 때 문제를 가질 수 있습니다: 앰프 포화 하 고 ( 그림 15참조) 방전을 1 초 이상 걸릴 수 있습니다. 전극 및 올바르게 이득 설정의 주의 깊은 배치는이 문제를 극복할 수 있다. 이 발생 하지 않는 슈퍼맨 식자 MK와 나 또는 어떤 다른 일반적으로 사용 되는 근육 EMG에 대 한.
임계값 트리거 값을 찾기 위해 장치를 보정 하는 동안 많은 다른 값을 볼 수 있습니다. 그들은 3 개 범위에 빠지다: 때 손은 고정 값, 손 이동 때 값과 값 손가락 이동. 표 2 각 범위;에 기록 된 값을 보여 줍니다. 고정 및 손을 이동 하는 범위에 대 한 최대 값이 표시 됩니다 그리고 범위 긴장 풀어 손가락에 대 한 최소 값 표시 됩니다. 임계값 값을 이동 손을 위와 값 긴장 풀어 손가락 아래 거짓말을 선택 합니다. 향해 손 이동 하는 범위 값 가양성의 기회를 증가 하 고 값 범위를 긴장 풀어 손가락을 가까이 반대 하는 동안 false 네거티브의 기회를 감소 시킨다.
두 소자는 모두 어디에 납치범 인덱스 근육을 긴장 풀어 때 false 네거티브 및 틀린 확실성에 대 한 테스트. False 네거티브 장치는 근육의 긴장 풀어 시 슬라이드의 변화를 실행 하지 않았다 때 슬라이드 변경 발생 없는 긴장 풀어 가양성 기록 되었다 기록 되었다. 어느 장치 MK II 장치 가끔 거짓 부정 (5% 미만의 시간)을 경험 하지만 틀린 확실성을 가진 문제를 했다. MK 나 장치 경험 틀린 확실성 또는 네거티브 동작의 전반 45 분 동안 비록 false 수 음화 50 분 사이의 시간 총 장치 실패까지 빠르게 증가 ( 표 3참조).
이러한 결과 표시 장치 그것의 진술한 목표에 성공 했다. 표 1 에서는 MK II 저렴 MK I. 표 2 와 표 3 쇼 보다 더 많은 유연성을가지고 장치 기능으로 의도 하 고 EMG 기반 트리거 장치로 사용 될 수 있습니다. 그림 15 는 납치범 인덱스 근육을 사용 하는 경우 발생할 수 있는 문제를 보여 줍니다: 이것은 문제가 대부분 근육으로 발생 하는 이득 변경 하 여 해결할 수 있습니다. 장치에 문제가 몇 가지 용도 대 한 충분 한 있습니다.

그림 1: 슈퍼맨 식자 MK I. 이 왼쪽된 팔에 슈퍼맨 식자 MK I와 그것의 구성 요소를 모두 탑재를 보여줍니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

그림 2: 는 장치 블록 다이어그램. 각 상자는 장치;의 별도 섹션을 나타냅니다. 각 상자는 섹션에는 장치의 일부로 기능이입니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

그림 3 : 장치를 구축 하는 단계. 프로토콜의 각 단계에 대 한 높은 수준의 개요를 포함 하는 흐름 다이어그램. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

그림 4 : 초기 MK 나 어셈블리. 바이오-신호 방패 및 전극 케이블는 마이크로컨트롤러 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

그림 5: 초기 MK II 어셈블리. 근육 센서와 납땜된 연결 하는 마이크로컨트롤러 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

그림 6 : 전극 배치. 이 그림 납치범 indicis를 사용 하 여 때 손에 전극의 정확한 위치를 보여 줍니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

그림 7 : MK II 케이스 부품. MK II 케이스 사진 평판 프린터에서 인쇄에 대 한 준비의 부분입니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

그림 8 : 제어 회로 MK. (한) (회색 표시 스트립 보드 밑면에 깨진 연락처가 있던) 위에서 회로 기판. (b) 회로 보드 완료. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

그림 9 : 제어 보드 회로 다이어그램의 MK. MK에 대 한 회로도 나 제어 저항기, 스위치와 전선 사이의 연결을 보여주는 보드. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

그림 10 : 제어 회로 MK. (한) 제어 보드 위에서 (회색 마크 스트립 보드 밑면에 깨진 접촉을 했다). (b) 완료 회로 보드 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

그림 11: MK II 제어 보드 회로 다이어그램. MK에 대 한 회로도 나 제어 저항기, 스위치와 전선 사이의 연결을 보여주는 보드. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

그림 12 : 조립된 MK I. 이 MK의 모든 구성 요소를 보여줍니다 내가 전에 그들은 팔에 장착 된 장치. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

그림 13 : 조립 식자 MK II. (한) 장소 마이크로컨트롤러의 경우 하단에. (b) 중간 섹션에는 배터리를 배치 하 고 뚜껑에 넣어. (c)의 경우 근육 센서 놓고 뚜껑에 넣어 합니다. (d) 근육 센서 마이크로컨트롤러 고 마이크로컨트롤러에 배터리를 연결. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

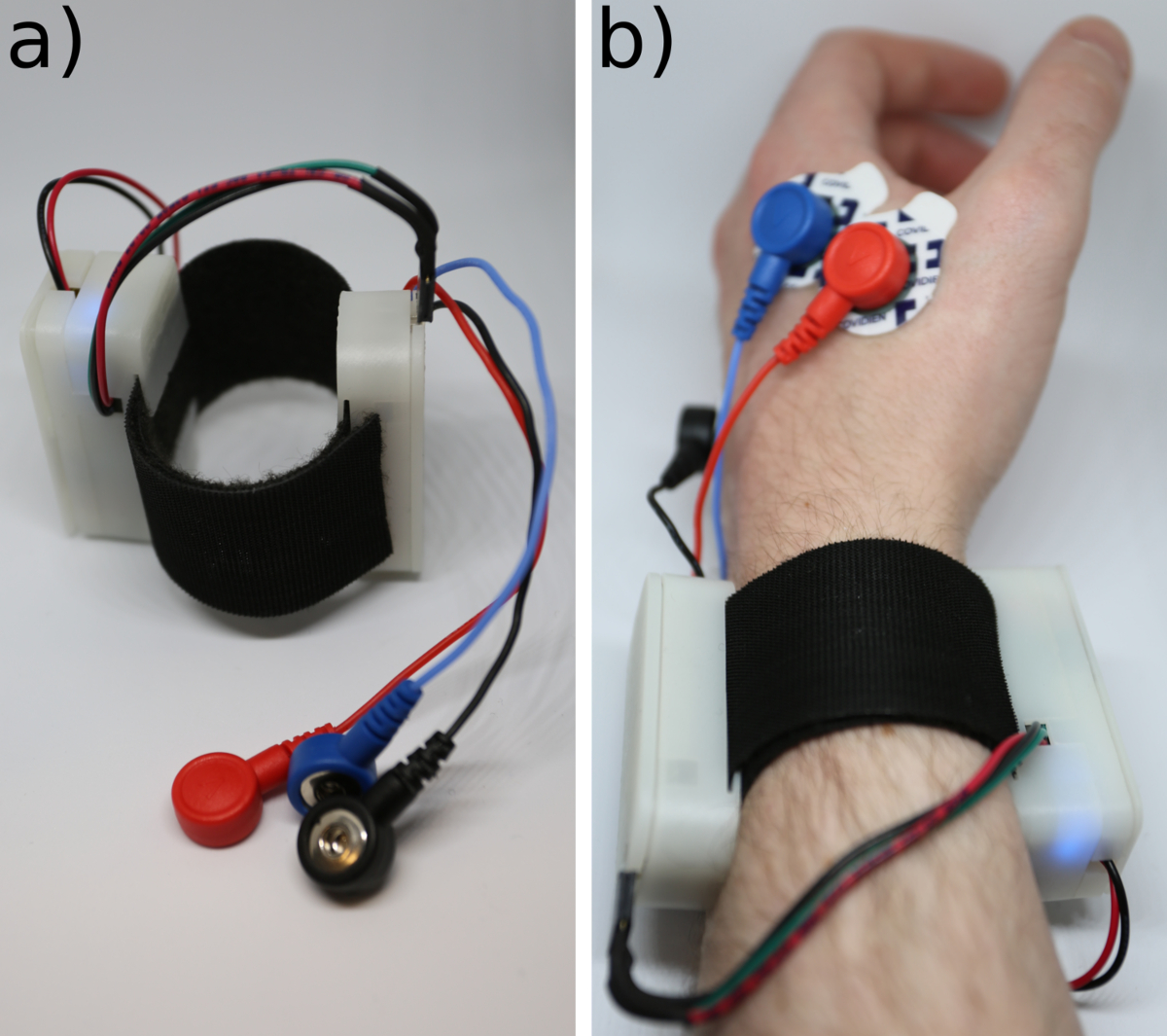
그림 14 : 완성 된 슈퍼맨 식자 MK II. (한) 후크 및 루프 스트랩. (b) 손목에. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}

그림 15: 근육 센서의 oversaturation. 이 그림 때 근육 센서 oversaturated 이다; 대 지는 근육 활성화 장치에 전류 이득 설정에 대 한 너무 강 했을 때. 이 그림의 더 큰 버전을 보려면 여기를 클릭 하십시오.
{kind=link}
| MK I | MK II | |
| EMG 센서 | 일반 바이오 센서 | 전용된 근육 센서 |
| 무선 | 별도 무선 모듈 | 마이크로컨트롤러 보드 |
| 무선에 EMG? | 아니요 | 예 |
| 배터리 | 9 V P P 3 | 150 mAh LiPo |
| 운영 시간 | 1 h | 8 h |
| 빌드 시간 | 5 h | 4 h |
| 총 비용 | $ 150 | $ 80 |
| 가양성 (%) | 0 | 0 |
| 틀린 네거티브 (%) | 0 | 4.7 |
표 1: 디바이스의 비교. 이 테이블의 소자, 기능에 디자인의 여러 측면을 비교합니다.
| 고정 (최대) | 손 이동 (최대) | 손가락 Tensing (최소) | 임계값 | |
| MK I | 25 | 35 | 215 | 200 |
| MK II | 40 | 280 | 460 | 400 |
표 2: 보정 결과. 이 표에서 손을 고정, 이동 손 및 손가락 긴장 풀어, 유지 하는 동안 가져온 값으로 선택한 임계값 값을 보여 줍니다.
| 틀린 네거티브 (테스트 모든 30 s)의 수 | 가양성 (자발적인 활성화)의 수 | ||||
| 첫번째 45 분 | 45 분-1 시간 | 1-8 h | 첫 번째 h | 1-8 h | |
| MK I | 0 | 35 | N/A | 0 | N/A |
| MK II | 4 | 1 | 40 | 0 | 0 |
표 3: 장치의 테스트. 가양성 및 false 네거티브 두 장치 사이의 비교.
추가 코드 파일 MK I와 MK II:
"BionicClicker.ino"를 다운로드 하려면 여기를 클릭 하십시오
"BLEBionicClicker.ino"를 다운로드 하려면 여기를 클릭 하십시오.
"BLEBoomTest.ino"를 다운로드 하려면 여기를 클릭 하십시오.
"BLEThresholdTest.ino"를 다운로드 하려면 여기를 클릭 하십시오.
"BoomTest.ino"를 다운로드 하려면 여기를 클릭 하십시오.
"ThresholdTest.ino"를 다운로드 하려면 여기를 클릭 하십시오.
"깃털-Featherbase.stl"를 다운로드 하려면 여기를 클릭 하십시오.
"깃털-Feathermid.stl"를 다운로드 하려면 여기를 클릭 하십시오.
"깃털-Feathertop.stl"를 다운로드 하려면 여기를 클릭 하십시오.
"묘-Myobase.stl"를 다운로드 하려면 여기를 클릭 하십시오.
"묘-Myolid.stl"를 다운로드 하려면 여기를 클릭 하십시오.
토론
MK II 납치범 indicis에 사용 될 때의 채도 문제 보다 그것 5 월 첫 번째 표시입니다. 주의 깊은 배치 및 올바른 전극의 이득 설정 중지가 장치는 리모컨으로 사용 될 때 문제가 되는 것. 납치범 인덱스의 활동을 정확 하 게 기록에 관심을, 하지 않는 한이 전혀 문제가 될 가능성이 크다. 아니-채도 이득 설정 된 후 다른 근육에 보아 왔다. MK II와 false 네거티브 납치범 indicis를 사용 하는 경우 적절 한 임계값을 선택의 어려움 때문 이다. 큰 근육과 근육의 목적이 아닌 활성화의 크기와 목적이 근육의 긴장 풀어 차이 크면, 가양성 및 false 네거티브에서 임계값 포인트의 선택에 대 한 허용 포인트입니다. 특히 작은 손이 납치범 indicis 근육 (비록 작은 전극 패드와 함께이 잠재적으로 해결 될 수 있었다) 올바르게 배치 전극에 대 한 너무 작은 수 있습니다.
상당히 배터리 수명을 MK II에 대 한 여러 가지 이유로 유용합니다. 첫째,는 MK 나 장치 위해 더 이상 사용할 수 없습니다 그래서 사용, 45 분 후 이상 하 게 행동 하기 시작 했다. 둘째로 다중 시간 배터리 수명과, MK II 간주 될 수 있습니다 유용한 장치에 대 한 입력 컨트롤 하 고 실제 배터리 크기에만 작은 증가, 그것은 하루 종일 모니터링 장치로 사용 될 수 있습니다. 무선 마이크로컨트롤러는 6 아날로그 입력 및 13 디지털 입력; 즉, 장치 제어 입력에 더 많은 자유도와 장치를 만들려고 여러 근육 센서에서 신호를 받아들일 수 있었다. 또한 근육 센서의 교체 다른 생물학 신호를 입력으로 사용 하는 장치를 만드는 아날로그 출력 어떤 바이오 센서는 주목 한다. 장치의 코드 변경의 기능을 쉽게 수정 수 있습니다 또한. 소프트웨어 및 하드웨어 장치의 변경 장치를 간단 하 고 다양 한 수정 하실 수 있습니다.
그것은 현재로 선 장치에의 한 제한은는 EMG 출력 보낼 수 없습니다 무선 높은 데이터 속도에서이 무선 마이크로컨트롤러 버퍼를 오버 로드할 수 있습니다. 또 다른 한계는 기술, 입력으로 납치범 인덱스를 사용 하 여 매우 작은 근육으로, 반면에 전극의 간격 거의 중복; 만약 누군가가 특히 작은 손, 그것 수 있습니다 수 없습니다 올바르게이 근육에 전극을 놓고을.
장치는 잠재적인 연구 프로젝트에 유연성에 관해서 더 비싼 장치 몇 가지 장점이 있습니다. 그것은 저렴 한 비용: 장치 비용 80 달러 및 추가 EMG 채널에만 35 달러, 이상적 작은 또는 학생 프로젝트 비용. 그것은 쉽게 사용자 정의할 수, 소프트웨어를 쉽게 편집할 수 있습니다, 그리고 다른 하드웨어 입력 변경. 그것은 작은 크기, 그래서 그것을 입고 있는 사람 무거운 또는 부피가 큰 장비를 수행할 필요는 없습니다. 어떤 호환 무선 장치와 쉽게 통합 될 수 있도록 그것은 또한 다른 장치에 무선 키보드도 나타납니다. 장치는 이미 가까운 미래에 출판 될 것입니다 보조 장치에 통합 되었습니다.
크기와 MK II의 정의의 용이성, 그것은 이미 여러 연구 프로젝트에 통합 무선 EMG 모듈 및 무선 트리거 메커니즘으로 간주 되고있다. 그것은 또한 하나의 마스터 학생의 과정에 랩 세션의 기반으로 사용 되 고. 우리는 장치를 확인 하 고 싶습니다 주요 개선; 무선 전송 속도 증가 하는 목표 달성 10 Hz 이며 아직 결정 될 것 이다 여부이 하드웨어 또는 소프트웨어를 통해 수행 됩니다.
프로토콜 내에서 가장 중요 한 단계는 2.6 및 2.7 단계: 임계값 트리거 값의 선택. 2.6 단계, 특별 한 주의이 안테나 역할 수 있고 모션 아티팩트; 생성 EMG 케이블의 움직임에 지불 될 필요가 그러나, 이러한 고정 유지 하는 경우이 문제가 아니다. 2.7 단계에서 선택 된 값이 너무 높은 경우이 결과 허위 제외 어. 이 값이 너무 낮은 경우 오판이 발생 합니다. 납치범 indicis의 경우 그것은 매우 더 큰 근육이 나타나지 않는 문제가 있을 비록 가끔 거짓 부정 발생 하지 않는 값을 찾을 어렵다. 경우 올바른 값을 찾는 것은 여전히 문제, 이득 최소 값을 설정 하 고 활성화 및 활성화에 큰 차이의 포인트 아래 머물고 값 직렬 판독을 통해 볼 때까지 그것을 증가 하 여 수정 하실 수 있습니다. 채도입니다.
전반적인 MK II는 MK에 상당한 개선 이다 잠재적인 연구 장치로 내가 비록 MK 나는 강한 시각적 효과, 그것은 여전히 미래에 공공 참여 이벤트 사용된 될 가능성이 있기 때문에.
공개
저자는 공개 없다.
감사의 말
프로젝트는 엔지니어링 투자 및 물리 과학 연구 위원회 EPSRC (EP/K503745/1), 국립 건강 연구 (NIHR) 생물 의학 연구 센터 (BRC) (BRC272/안녕/JG/101440)와 UCL에 대 한 제조 업체 변경.
자료
| Name | Company | Catalog Number | Comments |
| For the Mark I | |||
| Equipment | |||
| Laptop | Any laptop with USB | ||
| USB B cable | From laptop to USB-B connection on Arduino | ||
| Soldering Station | |||
| Solder | |||
| Hot glue gun | |||
| Hot glue gun glue | |||
| Items | |||
| Small Single-Core Multi-thread Wires | Black, Red, Yellow, Brown, Orange White, Blue, | ||
| Arduino MEGA 2560 | Arduino | Arduino MEGA 2560 | (Geniuno MEGA 2560 outside US) |
| E-Health Shield v2.0 | Cooking Hacks | e-Health Sensor Shield V2.0 for Arduino, Raspberry Pi and Intel Galileo [Biometric / Medical Applications] | |
| EMG cables | Cooking Hacks | Electromyography Sensor (EMG) for e-Health Platform [Biometric / Medical Applications] | |
| EMG Electrodes | Sparkfun | SEN-12969 | |
| 9V battery | Any | ||
| Power cable | PP3 9v connector with jack | ||
| Bluefruit EZ-KEY HID | Adafruit | 1535 | |
| strip board | Amazon.co.uk | Small Stripboard 25 X 64mm Pack of 3 | any similiar stripboard 2.54mm pitch 7x25 |
| push button switch | COM-00097 | ||
| slide switch | amazon.com | 20 Pcs On/Off/On DPDT 2P2T 6 Pin Vertical DIP Slide Switch 9x4x3.5mm | |
| resistors | COM-11508 | ||
| Double sided Velcro | |||
| Break Away Headers - Straight | Sparkfun | PRT-00116 | 2, 2 and 5 needed |
| For the Mark II | |||
| Equipment | |||
| Laptop | Any laptop with USB connection | ||
| USB micro cable | From laptop to USB micro (standard phone connector style) | ||
| Soldering Station | Any | ||
| Solder | |||
| Items | |||
| Small Single-Core Multi-thread Wires | Black, Red, Green, White, Blue, | ||
| Feather BLE 32U4 | Adafruit | 2829 | |
| MyoWare | Sparkfun | SEN-13723 | |
| EMG cables | Sparkfun | CAB-12970 | |
| EMG electrodes | Sparkfun | SEN-12969 | |
| 3.7 V LiPo | Adafruit | 1317 | |
| Strip Board | amazon.co.uk | Small Stripboard 25 X 64mm Pack of 3 | 2.54 pitch 7x9 rows |
| Push Button switch | COM-00097 | ||
| slide switch | amazon.com | 20 Pcs On/Off/On DPDT 2P2T 6 Pin Vertical DIP Slide Switch 9x4x3.5mm | |
| resistors | COM-11508 | ||
| 3D printed parts | Can be 3D printed yourself or printed from a website | ||
| Double sided Velcro | |||
| Break Away Headers - Straight | Sparkfun | PRT-00116 | 3 pins needed |
| Female Headers | sparkfun | PRT-00115 | 3 pins needed |
참고문헌
- Navarro, X., Krueger, T. B., Lago, N., Micera, S., Stieglitz, T., Dario, P. A critical review of interfaces with the peripheral nervous system for the control of neuroprostheses and hybrid bionic systems. J Periph Nerv Syst. 10 (3), 229-258 (2005).
- Yang, D. P., et al. An anthropomorphic robot hand developed based on underactuated mechanism and controlled by EMG signals. J Bionic Eng. 6 (3), 255-263 (2009).
- Chu, J. U., Moon, I., Lee, Y. J., Kim, S. K., Mun, M. S. A supervised feature-projection-based real-time EMG pattern recognition for multifunction myoelectric hand control. IEEE/ASME Trans Mechatronics. 12 (12), 282-290 (2007).
- Bitzer, S., Van Der Smagt, P. Learning EMG control of a robotic hand: towards active prostheses. Proceedings 2006 IEEE International Conference on Robotics and Automation. , Orlando, Florida. (2006).
- Cipriani, C., Zaccone, F., Micera, S., Carrozza, M. C. On the shared control of an EMG-controlled prosthetic hand: analysis of user-prosthesis interaction. IEEE Trans Rob. 24 (1), 170-184 (2008).
- Tenore, F., Ramos, A., Fahmy, A., Acharya, S., Etienne-Cummings, R., Thakor, N. V. Towards the control of individual fingers of a prosthetic hand using surface EMG signals. IEEE EMBS. 2007, 6145-6148 (2007).
- Reinvee, M., Pääsuke, M. Overview of Contemporary Low-cost sEMG Hardware for Applications in Human Factors and Ergonomics. In Proc Hum Fact Ergon Soc Annu Meet. 60 (1), 408-412 (2016).
- George, P. K., Minas, V. L., Agisilaos, G. Z., Christoforos, I. M., Kostas, J. K. Open-Source, Anthropomorphic, Underactuated Robot Hands with a Selectively Lockable Differential Mechanism: Towards Affordable Prostheses. 2015 IEEE/RSJ International Conference of Intelligent Robots and Systems. , Hamburg. (2015).
- Agisilaos, G. Z., Minas, V. L., Christoforos, I. M., Kostas, J. K. Open-Source, Affordable, Modular, Light-Weight, Underactuated Robot Hands. IEEE/RSJ International Conference of Intelligent Robots and Systems. , Chicago, Illinois. (2014).
- Minas, V. L., Agisilaos, G. Z., Melina, N. B., Kostas, J. K. Open-Source, Low-Cost, Compliant, Modular, Underactuated Fingers: Towards Affordable Prostheses for Partial Hand Amputations. 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. , Chicago, Illinois. (2014).
- Engaging the senses: object-based learning in higher education. Chatterjee, H. J., Hannan, L. , Ashgate Publishing, Ltd. (2015).
- Zainee, N. M., Chellappan, K. Emergency clinic multi-sensor continuous monitoring prototype using e-Health platform. 2014 IEEE Conference on Biomedical Engineering and Sciences (IECBES). , Kuala Lumpur. (2014).
- Paul, P., Motskin, M. Engaging the Public with Your Research. Trends Immunol. 37 (4), 268-271 (2016).
- e-Health Sensor Platform V2.0 for Arduino and Raspberry Pi. , Available from: https://www.cooking-hacks.com/documentation/tutorials/ehealth-biometric-sensor-platform-arduino-raspberry-pi-medical#step3_1 (2017).
- Arduino IDE Setup. , Available from: https://learn.adafruit.com/add-boards-arduino-v164/setup (2017).
- Ultimaker 2+. , Available from: https://ultimaker.com/en/products/ultimaker-2-plus (2017).
- Form 2. , Available from: https://formlabs.com/3d-printers/form-2/ (2017).
- Pairing to Bluefruit. , Available from: https://learn.adafruit.com/introducing-bluefruit-ez-key-diy-bluetooth-hid-keyboard/pairing-to-bluefruit (2017).
재인쇄 및 허가
JoVE'article의 텍스트 или 그림을 다시 사용하시려면 허가 살펴보기
허가 살펴보기더 많은 기사 탐색
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. 판권 소유