
Method Article
Paw-Print Анализ контрастно-расширенных записей (PrAnCER): Низкая стоимость, открытый доступ Автоматизированная система анализа gait для оценки дефицита двигателя
В этой статье
Резюме
Мы описываем новую систему анализа походки, Paw-Print Анализ Контрастно-расширенных записей (PrAnCER), автоматизированную систему открытого доступа для количественной оценки характеристик походки у крыс, которая использует новый полупрозрачный пол, чтобы автоматически количественной походки. Эта система была проверена с использованием галоперидол модели болезни Паркинсона.
Аннотация
Анализ gait использован для того чтобы количественно изменения в функции мотора в много моделей грызунов заболевания. Несмотря на важность оценки походки и двигательной функции во многих областях исследований, имеющиеся коммерческие варианты имеют ряд ограничений, таких как высокая стоимость и отсутствие доступного открытого кода. Для решения этих вопросов мы разработали PrAnCER, Paw-Print Analysis of Contrast-Enhanced Recordings для автоматической количественной оценки походки. Контрастно-увеличенные записи производятся с помощью полупрозрачного пола, который скрывает объекты, не соприкасающиеся с поверхностью, эффективно изолируя отпечатки лапкрысы во время прогулки. Используя эти видео, наша простая программа программного обеспечения надежно измеряет различные параметры пространственно-временной походки. Чтобы продемонстрировать, что PrAnCER может точно обнаружить изменения в двигательной функции, мы использовали модель галоперидола болезни Паркинсона (PD). Мы тестировали крыс в двух дозах галоперидола: высокой дозе (0,30 мг/кг) и низкой дозе (0,15 мг/кг). Haloperidol значительно увеличилось продолжительность позиции и задняя лапа контакт области в условиях низкой дозы, как можно было бы ожидать в модели PD. В состоянии высоких доз, мы обнаружили аналогичное увеличение в области контакта, но и неожиданное увеличение длины шага. С дальнейшим исследованием, мы обнаружили, что это увеличение длины шага согласуется с бодрящий побег явление обычно наблюдается в более высоких дозах галоперидола. Таким образом, PrAnCER удалось обнаружить как ожидаемые, так и неожиданные изменения в моделях походки грызунов. Кроме того, мы подтвердили, что PrAnCER является последовательным и точным по сравнению с ручной скоринга параметров походки.
Введение
Грызуны обычно используются в качестве моделей для изучения широкого спектра заболеваний и травм, включая артрит1, болезнь Паркинсона (PD)2,3, нервно-мышечные расстройства4,5, гидроцефалия6 , и повреждение спинного мозга7. В этих условиях, такие симптомы, как боль, баланс, и двигательная функция может быть измерена путем изучения походки животных моделей. Эти модели количественно с помощью набора пространственно-временной походки параметров, которые обобщают расположение и сроки отпечатков лап, а также области контакта лапы на земле.
Хотя существует много вариантов анализа походки, существующие системы имеют несколько недостатков. В традиционных чернил и бумаги тестирования, лапы животного покрыты чернилами, прежде чем он ходит по листу белой бумаги (Рисунок 1A). Полученные отпечатки лап могут быть измерены для длины шага и ширины позиции, но ключевые параметры височной походки, такие как скорость или продолжительность шага, не могут быть оценены. Современные системы на основе видео являются более надежными, но видео-анализ требует трудоемкой кадр за кадром скоринга, если подходящая автоматизированная система используется8. Есть много коммерческих автоматизированных систем скоринга в настоящее время доступны, но эти системы могут быть непомерно дорогими. Кроме того, эти системы опираются на четкий настил или в некоторых случаях, беговые дорожки, оба из которых изменяют естественное движение. Беговые дорожки были показаны, чтобы замаскировать дефицит двигателя в некоторых моделях болезни9, в то время как четкий настил (рисунок1B) заставляет мышей проводить больше времени по периметру открытого поля, что указывает на повышенную тревогу10. В идеале, походка анализ аппарата не будет полагаться на либо, производя наиболее естественные модели движения с наименьшим стрессом для животного.
Доступные варианты с открытым исходным кодом и коммерческие используют различные методы, чтобы преодолеть трудности изоляции следа от тела животного, несмотря на переменные условия освещения, цвет животных, и формы печати. Некоторые усиливают контраст контактных лап с помощью поверхностей, которые высвобождают свет в ответ на давление7,11,12, но они являются дорогостоящими и технически трудно построить. Другие системы используют несколько углов обзора,которые позволяют наблюдать за координацией всего тела 8,13. Хотя эти варианты предлагают преимущества для измерения дополнительных параметров двигателя за походкой, они неоправданно сложны для простого анализа походки. Кроме того, все эти методы опираются на четкий настил, который изменяет естественное поведение.
PrAnCER основан на том, что мы называем Контрастно-улучшенные записи, которые используют сочетание освещения и полупрозрачный пол для повышения обнаружения отпечатков. При взгляде снизу, это создает высококонтрастное изображение (лапа печати) в то время как заслоняя вид объектов, не в контакте с поверхностью (тело животного) (Рисунок 1D). При взгляде сверху пол кажется непрозрачным. Полученное в результате лапы в нашем методе позволяет точно определить различные характеристики походки и локомотива нашей недавно разработанной автоматизированной системой. В настоящем исследовании мы описываем аппарат, наш протокол анализа походки и нашу автоматизированную систему скоринга, PrAnCER. Наш аппарат легко собирается и PrAnCER может быть использован для оценки дефицита двигателя в широком диапазоне заболеваний и травм моделей.
Чтобы продемонстрировать, что PrAnCER может быть использован для обнаружения аномальных моделей походки, мы использовали модель галоперидола PD, простая модель для переходных индукции локомотивных изменений14. Галоперидол является антагонистом рецепторов допамина, широко используемым в качестве антипсихотического1. Он влияет на двигательные системы, изменяя допамина сигнализации в стриатум, важный компонент моторного пути в базальных ганглиев14. Даже одна доза галоперидола быстро снижает внеклеточный уровень допамина в стриатуме, вызывая Паркинсоноподобный двигатель дефекирует15. Поведенческие эффекты мышечной жесткости, акинезии, и каталепсия, которая определяется как неспособность вернуться к нормальной осанке после того, как помещены в необычное положение11,16. Острые дозы галоперидола вызывают дефицит локомотива, идентифицируемый в ротационном тесте двигательной функции17. Мы рассуждали, что галоперидол опосредованные локомотивные нарушения также будут очевидны в ряде характеристик, доступных для автоматизированного анализа походки.
Хотя реакции на галоперидол сильно различаются в разных исследованиях, каталептические эффекты галоперидола возникают в дозах 0,5 мг/кг и выше, в то время как снижение отзывчивости и двигательных нарушений обнаруживается при более низких дозах (0,1 - 0,3 мг/кг)16, 17. В попытке избежать каталептического воздействия галоперидола, мы решили проверить две дозы галоперидола: высокую дозу (0,30 мг/кг) и низкую дозу (0,15 мг/кг). Как показано в таблице 1, Эксперимент 1 рассмотрел эффекты высоких доз галоперидол, в то время как эксперимент 2 испытания эффектов низкой дозы галоперидола. Мы использовали в рамках субъекта дизайн, в котором каждая крыса была протестирована в высоких дозах, низких дозах, и контроль (солин) условиях. Порядок состояния был уравновешен между крысами. Мы предсказывали, что острое введение галоперидола вызовет нарушения походки, аналогичные тем, которые встречаются в других моделях PD, таких как снижение скорости, снижение длины шага, и более длительной продолжительности позиции3,14,18 ,19. Мы наблюдали поведенческие изменения, включая акинезию после введения галоперидола в обеих дозах. В условиях низких доз, крысы значительно увеличили продолжительность позиции и область контакта задней лапы, как и ожидалось. Эти изменения походки сопоставимы с медленными, перетасовки шаги распространены среди пациентов PD2,20. В состоянии высоких доз, однако, мы увидели увеличение длины шага, а также увеличение области контакта лапы. Хотя увеличение длины шага было неожиданным, дальнейший обзор литературы показал, что она, вероятно, является частью галоперидола индуцированной бодрящий-побег ответ. Мы пришли к выводу, что PrAnCER действительно способен обнаруживать Паркинсона-подобные изменения в походке грызунов в соответствии с использованием нейролептиков.
протокол
Все процедуры были в соответствии с руководящими принципами Комитета по институциональному уходу и использованию животных Университета Брауна.
1. Аналитический аппарат Gait
- Подготовьте походку анализа дорожки, состоящие из четкого плексигласа закрытый дорожки (36" L х 3 "W х 4,5" H) размещены на четком полу плексигласа(рисунок 2A). Сделать оргстекла пол полупрозрачным, покрывая его с куском 16 LB хлопка волокна разработки веллума сократить до той же ширины, как дорожка.
ПРИМЕЧАНИЕ: Есть и другие методы для того, чтобы сделать пол полупрозрачным. - Поместите камеру со скоростью кадров не менее 30 кадров в секунду (fps) прямо под дорожкой, чтобы захватить середину трека(рисунок 2B).
- Безопасный полоса 12 V светодиодные фонари с 18 светодиодов / ноги примерно 2 дюйма от и 1 дюйм над полом дорожки, чтобы осветить трек.
2. Подготовка животных
- Разрешить животным акклиматизироваться в виварии, по крайней мере за 1 неделю до обработки. с крысами не менее 5 дней до начала эксперимента. Это исследование использовало 8 самцов крыс Лонг Эванс примерно 3 месяцев.
-
Привычка животных в испытательный зал и походка дорожки с комнатой огни выключен
- Поместите домашнюю клетку крысы на уровне поверхности в конце походки, чтобы служить в качестве коробки цели. Обратите внимание, что если домашняя клетка глубокая, в возрасте или локомотивных с нарушениями крысы могут извлечь выгоду из рампы или шаг, чтобы обеспечить более легкий доступ к домашней клетке.
- Позвольте крысе ходить от руки экспериментатора по длине дорожки, чтобы добраться до своей домашней клетки.
- Крысы часто останавливаются в конце дорожки, чтобы осмотреться, прежде чем прыгать вниз в домашнюю клетку. Если крыса занимает больше, чем 1 минута, чтобы выйти из дорожки, поощрять его, чтобы войти в свою домашнюю клетку с нежным толчок.
- Если крыса оборачивается, используйте небольшой кусочек плексигласа, чтобы заблокировать "начало" конца дорожки. Повторите в общей сложности 3 запуска.
- Привычка в течение по крайней мере 2 дней или до тех пор, пока крысы комфортно пересечения дорожки в устойчивом темпе без замораживания.
3. Процедура тестирования гайки
- Отрегулируйте настройки на веб-камеру программного обеспечения для достижения четкой картины лапы отпечатков. Выключите освещение комнаты для всех тестирования походки.
- Запись каждого запуска отдельно и этикетки надлежащим образом для использования с автоматизированной программой анализа.
- Убедитесь, что на пергаменте нет пятен или мусора. Начните запись за несколько секунд до того, как крыса войдет в дорожку и остановитесь, как только крыса выйдет из дорожки и войдет в свою домашнюю клетку.
- Продолжайте до тех пор, пока не будут завершены три приемлемых запуска или не будет выполнено 10 минут.
- Протрите вниз по дорожке с этанолом между каждой крысы и заменить пергамент по мере необходимости.
ПРИМЕЧАНИЕ: Приемлемое испытание определяется как испытание, в котором животное ходит последовательно и без паузы в течение первых 4 шагов бега. Если это трудно достичь, отрегулируйте критерии, чтобы включить испытания, в которых есть 4 последовательных шага в любой точке запуска, которые происходят без пауз или резкого ускорения.
4. Автоматизированный анализ PranCER
- Поместите все видео для анализа в папку.
- Запустите PrAnCER, запустив сценарий Python PrAnCER. PrAnCER будет анализировать видео на основе шагов, иллюстрированных на рисунке 3 и рисунке 4.
- Во всплывающем меню выберите указанную папку, нажав кнопку «Выбрать папку». При желании выберите пользовательские параметры для анализа. Подробные описания каждого параметра можно найти, нажав на вопросительный знак рядом с ними. Нажмите Продолжить, когда закончите.
- Определите область интереса (ROI) на изображении появляются дорожки. Чтобы сделать это, левый щелчок, чтобы определить верхний край и правый клик, чтобы определить нижний край. Если окно, которое появляется правильно, нажмите N, чтобы продолжить. Если нет, нажмите на отменить. После нажатия N программа будет работать автоматически.
- После завершения PrAnCER прекратите программу, нажав Enter в терминале.
- Чтобы вручную просмотреть результаты, полученные PrAnCER, запустите сценарий Python GaitEditorGUI и выберите подходящий файл .mp4 для каждого видео. При необходимости исправьте любые неправильно идентифицированные или слитые отпечатки.
- Чтобы извлечь пространственные и временные параметры походки, запустите сценарий Python ParameterAnalyzer. Выберите количество задних отпечатков для анализа и папку видео для анализа, а затем нажмите Продолжить. Это позволит вычислить файл .csv для каждого видео, содержащего ряд общих параметров походки, которые описаны в таблице 2 и проиллюстрированы на рисунке 5.
ПРИМЕЧАНИЕ: Полные скрипты, а также инструкции по чтению и анализу данных доступны на Авторском Ук.www.github.com/hayleybounds). Мы внедрили этот алгоритм, используя бесплатную библиотеку Python open-source OpenCV21. Кроме того, включены на GitHub инструкции для создания нашей походки анализа дорожки.
Результаты
Процедура галоперидола
Мы разработали эту систему анализа походки, чтобы сравнить параметры походки в контрольных крысах с теми, у экспериментальных крыс, которые, как ожидается, покажут различные нарушения локомотора, походки и баланса. Мы использовали в рамках субъекта дизайн, в котором каждая крыса была протестирована в солин, высокие дозы галоперидола и низких дозах галоперидола условиях. Крысы были разделены на две группы (A и B), чтобы позволить противовес; походка тестирование было уравновешено для времени суток и порядка состояния. Каждый тест был разделен 48 ч. Крысы были слегка под анестетом с изофлураном до получения интраперитонеальных (IP) инъекций либо солей или галоперидол. Gait был протестирован 1 ч после инъекции, в этот момент галоперидол должен быть на пиковых уровнях15,16,17.
Поведенческие результаты
Мы наблюдали заметные изменения поведения у животных, обработанных галоперидолом. В состоянии высоких доз, пять из восьми крыс были периоды неподвижности в начале дорожки, во время которого они не реагировали на экспериментатор касаясь их и устойчивы к перемещению. В некоторых случаях это состояние сохранялось в течение нескольких минут, пока крыса не была удалена с дорожки. В других случаях неподвижная крыса внезапно двигалась бы быстро или «привязывалась» по дорожке, а затем возвращалась в неподвижное состояние ближе к концу. В условиях низких доз, 3 из 8 крыс были аналогичные периоды неподвижности. В этой дозировке, был только один случай ограничивающего поведения. При лечении животных солью не наблюдалось.
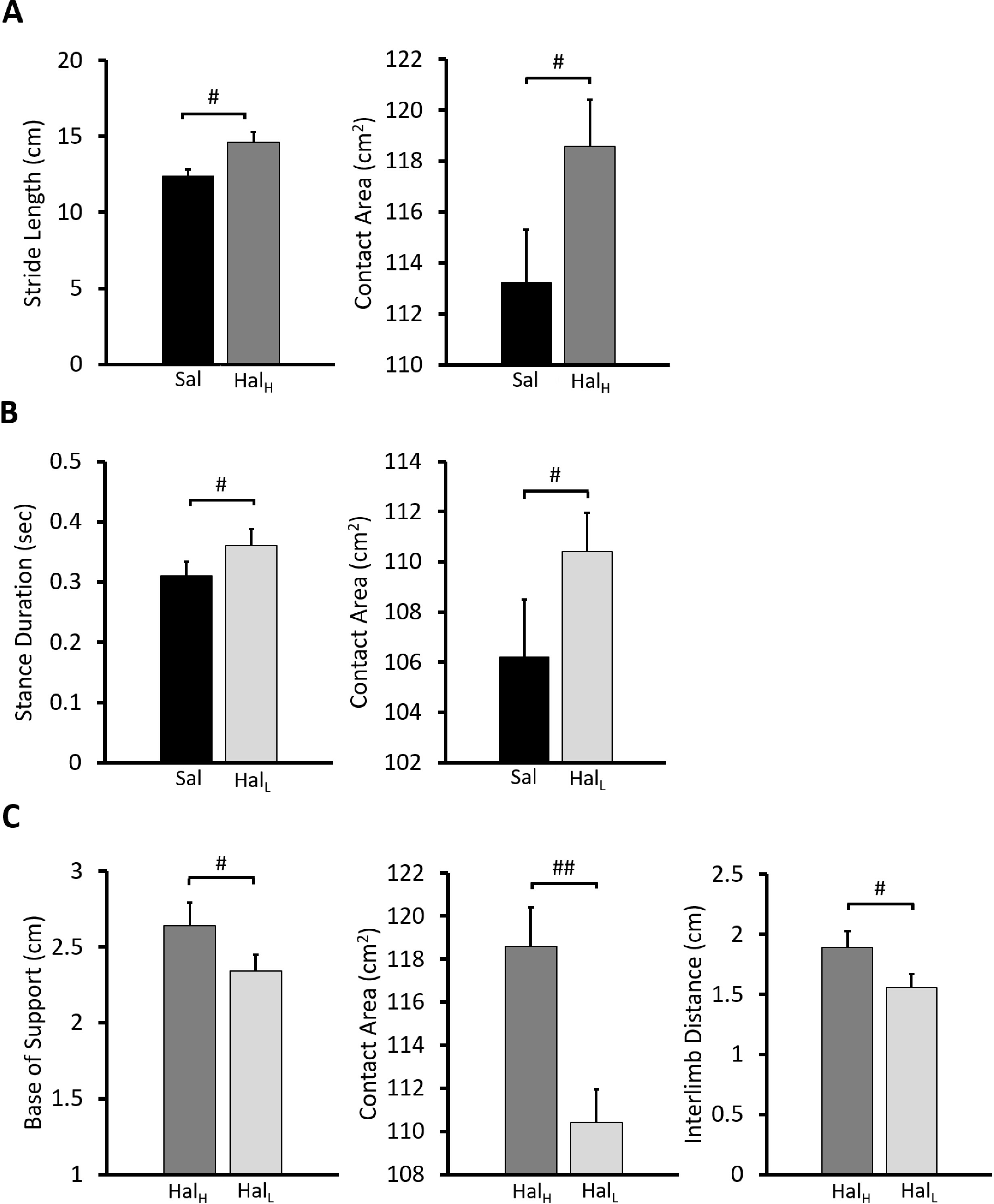
Мы проанализировали влияние галоперидола на следующие параметры походки: основание опоры, длина шага, скорость шага, длительность позиции, отношение позиции к качели, максимальная область контакта и расстояние между конечностями. Поскольку многие параметры походки для передних и задних конечностей идентичны и галоперидол, как правило, имеет равномерное воздействие на все конечности, мы вычислили параметры только для задних конечностей и не отделяли данные для левой и правой конечностей. Для каждой крысы, мы вычислили среднее количество каждого параметра походки от всех годных к учёным работает с каждого дня тестирования. Все параметры (кроме изменчивости скорости) были рассчитаны как среднее для первых 4 годных к учёным шагов бега. Для оценки того, является ли каждая дозировка галоперидола значительно влияет походка, мы использовали парный образец t-тест. В Эксперименте 1 произошло значительное увеличение длины шага(рисунок 6A;т(7) - -2,962, р 0,021) и максимальная зона контакта (рисунок6A;t(7) -2.51, р 0,04) у животных, получавших галоперидол с высокой дозой. База поддержки, скорость, продолжительность позиции и позиция к качели соотношение не были значительными. В Эксперименте 2, животные с учетом низкой дозы галоперидола показали значительное увеличение продолжительности позиции(рисунок 6B; t (7) - -2.444, р 0,044) и максимальная зона контакта (рисунок6B;t (7) - -3.085, р 0.018) по сравнению с сольистой. Никакие другие параметры походки не были значительными. Кроме того, была существенная разница между высокими дозами и низкими дозами галоперидола условия в базе поддержки(рисунок 6C; т (7) 2,651, р 0,033), максимальная область контакта (Рисунок 6C; т (7) 4,635, р 0,002) и расстояние между конечностями ( Рисунок 6C; t (7) 3,098, р 0,017).
Точность и ошибки в автоматизированной системе
Чтобы оценить точность PrAnCER, мы сравнили его автоматизированный анализ с ручным подсчетом 21 случайно отобранного видео из отдельной группы из 6 контрольных крыс. Для целей ручного скоринга видео были преобразованы в последовательность изображений, которые затем использовались для ручной маркировки мест отпечатков. Для повышения эффективности мы сосредоточили наш анализ на пространственных данных, измеренных только на задних отпечатках. Мы извлекли среднее длину шага и BOS для каждого видео и сравнили его с автоматизированными значениями. В то время как средняя длина шага не сильно отличалась между ручным скорингом и анализом PrAnCER(рисунок 7B;t(20) - 0,01, р 0,99), база поддержки была значительной (рисунок7A; t (20) - -2.21, р 0,038). Хотя автоматизированный и ручной скоринг, как правило, хорошо коррелирует, автоматизированная система сообщила 5% больше BOS в среднем. Это различие может быть связано с различиями в выборе центроидов, а не ошибками обнаружения. Для ручного подсчета было отмечено расположение печати, нарисовав овал вокруг основания каждого заднего отпечатка, так как было бы трудно вручную воспроизвести метод центра массовой оценки PrAnCER. Ясная тенденция была для PrAnCER переоценить BOS, возможно, потому, что некоторые животные могут splay их пальцами в асимметричным образом, в результате чего PrAnCER наблюдать более экстремальные центроиды, чем ручной скоринг. Другие системы также отметили значительное увеличение BOS между ручным и автоматизированным скоринга, несмотря на последовательную продолжительность шага меры17. Учитывая небольшие различия, наблюдаемые и согласованность с другими системами, мы пришли к выводу, что PrAnCER является надежным показателем параметров походки.
Важно отметить, что весь анализ точности произошел после ручной коррекции автоматизированного вывода с использованием графического интерфейса PrAnCER. Как и в существующих коммерческих системах, этот шаг необходим как для исправления ошибок в скоринге, так и для устранения пробегов, которые не соответствуют критериям22. Мы настроили PrAnCER ошибиться на стороне ложных срабатываний, так как они легче исправить пост-специально. Мы никогда не наблюдали PrAnCER не в состоянии обнаружить реальный отпечаток во время ручной коррекции более 5 сотен видео. Однако были отмечены и другие типы ошибок. Они делятся на 3 категории: ложные обнаружения (обнаружение непечати в виде печати), неправильное классификации (печать неправильно помечены как передние / задние или левые / правые), и ложные комбинации (два отпечатка неправильно объединены). Эти ошибки легко исправляются в сопутствующем графическом интерфейсе и обычно происходят лишь в небольшом проценте видео, снятых в обычных условиях. Даже при таких коррекциях PrAnCER заметно уменьшает количество ручного труда, участвующего в анализе походки. По нашим оценкам, для каждого видео требуется около 3 минут, чтобы запустить PrAnCER и исправить любые ошибки вывода (при необходимости), в то время как это займет около 10 минут, чтобы вручную забить и проанализировать то же видео.

Рисунок 1. Сравнение методов анализа походки. (A) Традиционный метод чернил и бумаги производит неточные отпечатки формы лапы и местоположения. (B) Видеозапись с прозрачным полом дает детальное представление отпечатков лап, но содержит много важных особенностей из тела крысы, что усложняет автоматизированный скоринг. (C) Легкая бумага над ясным полом создает шумное изображение и теряет детали. (D) Использование пергамента для создания полупрозрачного пола производит очень подробные отпечатки при визуальном устранении тела. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}

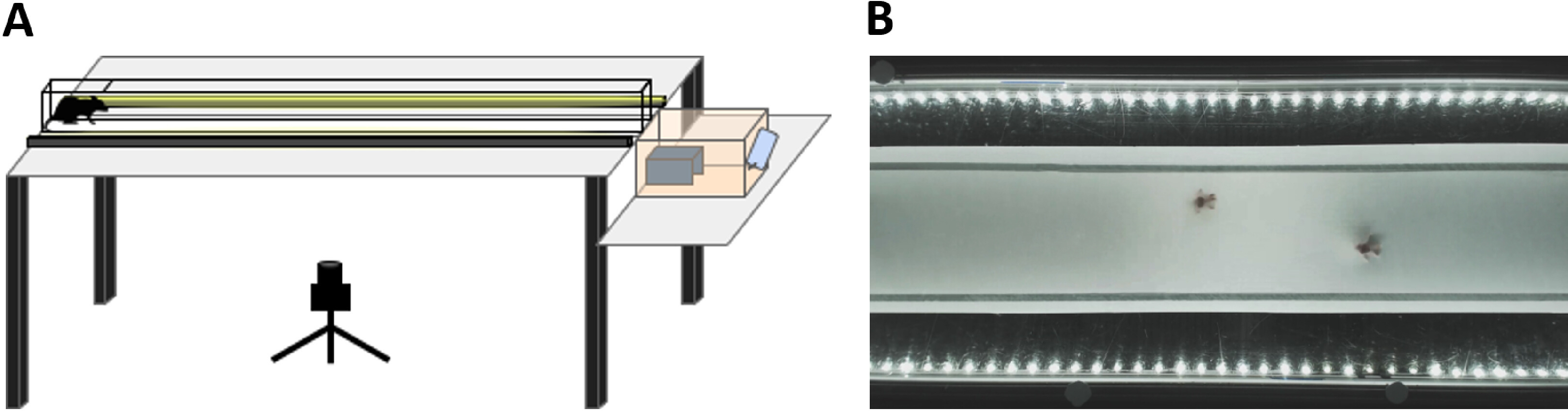
Рисунок 2. Схематическая иллюстрация походки и видеозапись. (A) Крыса идет через четкую дорожку с полупрозрачным полом в домашнюю клетку цель поле во время записи снизу. В этом случае, пергамент охватывает прозрачный пол, чтобы сделать его полупрозрачным. Дорожка освещается светодиодными полосками, расположенными по всей длине на уровне между ногами и телом животного. (B) Скриншот видеозаписи, демонстрирующей эффект полупрозрачного пола. Две лапы хорошо видны, но тело крысы по существу обнаружить. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}

Рисунок 3. Процесс обнаружения одного кадра отпечатка лапы. (A) Исходное изображение обезвращено, а затем подвергается фоновому вычитанию (B). (C) Применяется алгоритм обнаружения края и результаты преобразуются в серию X, Y координат, называемых контурами (D). (E) Контуры сгруппированы близостью и выпуклого корпуса (ограничительной коробки) группы берется для создания одного контура, охватывающего печать. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}

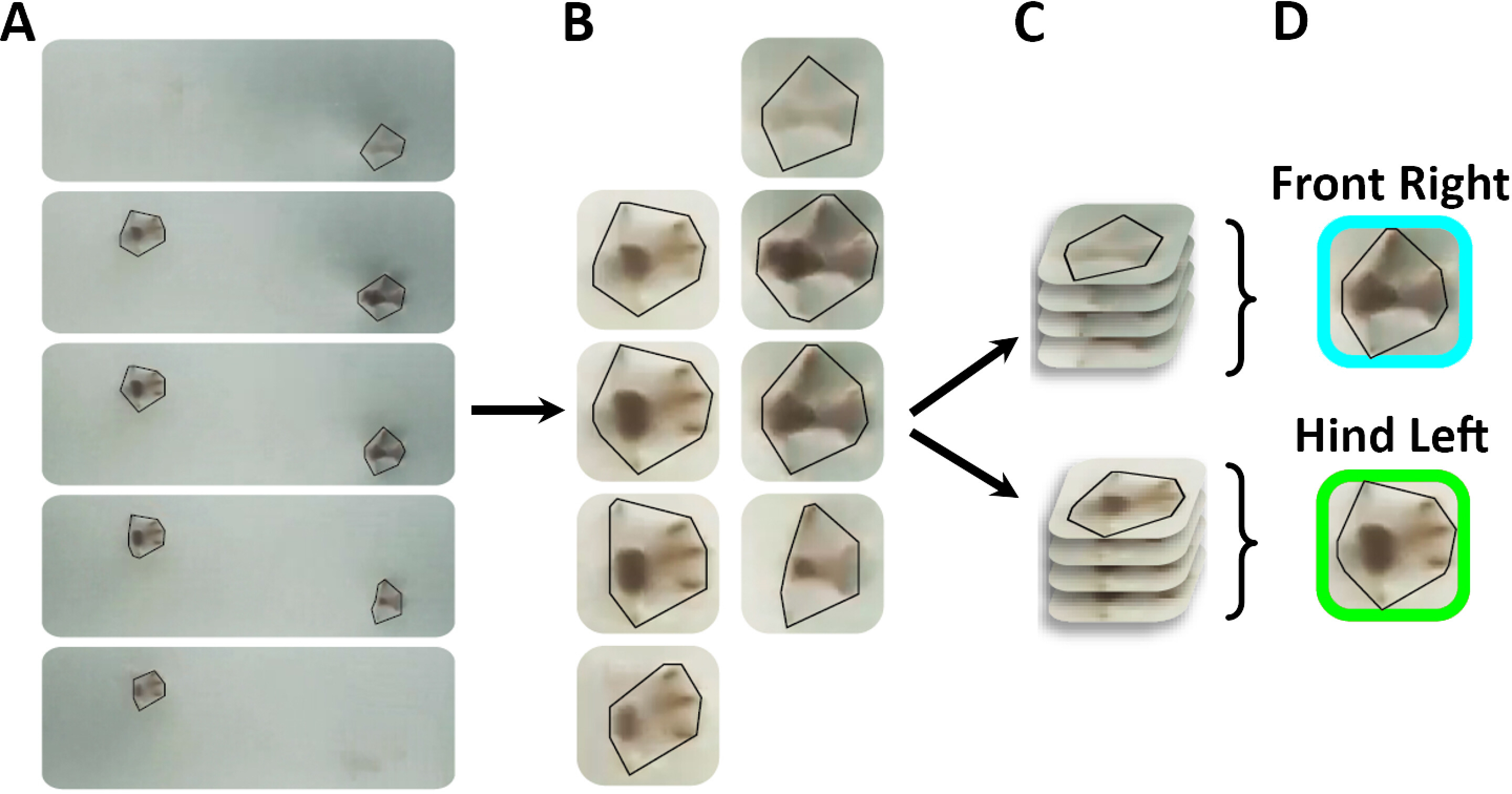
Рисунок 4. Преобразование отдельных обнаружений в классифицированный отпечаток. (A) Отпечатки лап впервые идентифицируются в наборе кадров. (B) Индивидуальным обнаружениям объектов дается номер, который идентифицирует их как печать, представляющую одно разместив одну лапу (C). (D) Наконец, они классифицируются как левые или правые в зависимости от их местонахождения относительно средней линии пути животного, и спереди или задней основе их местонахождения по отношению к предыдущим отпечаткам лап. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}

Рисунок 5. Иллюстрация проанализированных параметров походки. (A) Пример выхода, показывающий идентификацию и расположение отпечатков лап. Исходные обнаруженные края отображаются черным цветом. Окончательные обнаруженные лапы и приблизительная область показаны в цветах, указывающих на классификацию лап. На этой цифре желтый: передний слева, зеленый: задний левый, циановый: передний правый, и пурпурный: задний справа. Тем не менее, цвета могут быть изменены в скрипте Python в зависимости от предпочтений пользователя. (B) Сюжет, иллюстрирующие два основных временных параметра: количество времени, которое каждая лапа находится в контакте с землей (этап позиции) и в воздухе (качели фазы). Цветные блоки указывают фазу позиции, а белые пространства указывают на фазу качелей. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}

Рисунок 6. Воздействие галоперидола на походку. (A) Результаты эксперимента 1: высокой дозы галоперидола (HalH) значительно увеличилась длина шага и максимальная область контакта по сравнению с солевой состоянием (Sal). (B) Эксперимент 2 привел к более типичным симптомам паркинсона; низкие дозы галоперидола (HalL) значительно увеличили продолжительность позиции и максимальную зону контакта. (C) При сравнении галоперидола обработанных условий обоих экспериментов, высокая доза галоперидола увеличила базу поддержки, максимальную область контакта и расстояние между конечностями по сравнению с низким состоянием дозы. Данные являются средствами, которые означают SEM, n No8. Парные образцы t-test различия были следующими: p slt; 0.05, p slt; 0.01. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}

Рисунок 7. Точность автоматизированного анализа. (A) Автоматизированная система значительно отличается от ручного скоринга при измерении BOS, хотя это может быть связано с изменениями в ручном отборе центроидов, а не ошибками обнаружения. (B) Автоматизированная система существенно не отличается от ручного скоринга для длины шага. Эти результаты точности согласуются с результатами других доступных систем. Данные являются средствами, см. Парные образцы t-test различия были следующими: p qlt; 0.05. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}

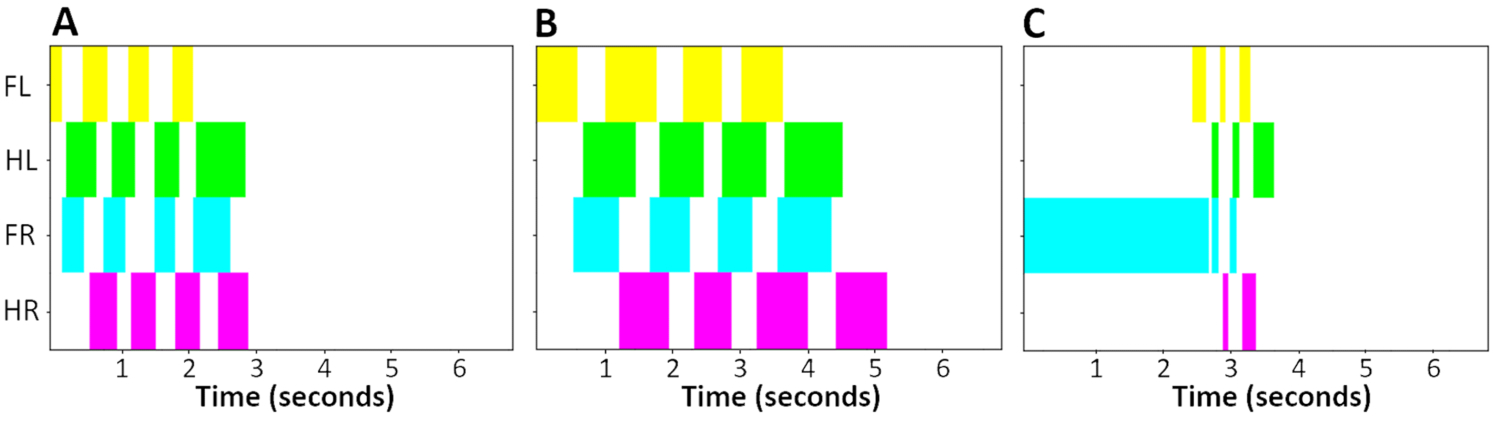
Рисунок 8. Сравнение временных параметров. Временные узоры походки для животных, обработанных сольным раствором (A) и низкой дозой галоперидола (B). (C) Иллюстрация бодрящий-побег ответ от крысы с учетом высокой дозы галоперидола. Как и на рисунке 5, цветные блоки указывают, когда лапа была в контакте с землей (позиция фазы) и белые пространства указывают, когда лапа была в воздухе (качели фазы). Аббревиаты: FL, передняя левая; HL, задний левый; FR, передний правый; HR, задний правый. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}
| Эксперимент 1 | Эксперимент 2 | |||||||
| Тест 1 | Тест 2 | Тест 3 | Тест 4 | Тест 5 | Тест 6 | Тест 7 | Тест 8 | |
| Группа А | ХэлH | Сал | ХэлH | Сал | Сал | ХэлЛ | Сал | ХэлЛ |
| Группа B | Сал | ХэлH | Сал | ХэлH | ХэлЛ | Сал | ХэлЛ | Сал |
Таблица 1. Экспериментальный дизайн. В этой таблице иллюстрируется экспериментальный дизайн, используемый в данном исследовании. Мы использовали в рамках субъекта дизайн, в котором каждая крыса была протестирована в высокой дозе галоперидола (HalH), низкие дозы галоперидола (HalL) и солевой (Сал) условиях. Крысы были разделены на две группы; тестирование было уравновешено для времени суток и порядка состояния.
| Параметр | Определение |
| Длина шага | Расстояние между последовательными контактами одной и той же лапы |
| Длина шага | Расстояние между последовательными контактами контралатеральных передних или задних лап вдоль оси направления движения |
| База поддержки (BOS) | Расстояние между последовательными контралатеральными передними или задними лапами перпендикулярно оси направления движения |
| Максимальная зона контакта | Максимальная обнаруженная область заднего отпечатка |
| Расстояние между конечностями | Расстояние между ипсилатеральной передней и задними лапами |
| Длительность стойки | Продолжительность времени лапа была в контакте с землей |
| Длительность качели | Продолжительность времени лапа не была на земле |
| Соотношение стойки к качели (SSR) | Длительность стойки/качели |
| Дискретная скорость | Длина шага/(длительность стойки и продолжительность качели) для лапы |
| Средняя скорость | Среднее значение дискретных скоростей в период, используемый в анализе |
| Вариабельность скорости | Процентное изменение дискретных скоростей во время пробежки |
| Скорость выполнения | Время пересечь туннель/длину туннеля |
Таблица 2. Описание параметров походки. В этой таблице описаны наиболее часто используемые параметры походки; те, которые используются в этом исследовании, показаны жирным шрифтом.
Обсуждение
В этом исследовании мы протестировали PrAnCER, новую автоматизированную систему анализа походки, которая использует контрастно-увеличенные видео, произведенные с помощью полупрозрачного пола, чтобы скрыть тело животного и дать четко определенные отпечатки лап для простого автоматизированного обнаружения. PrAnCER точно идентифицирует отпечатки лап и чувствителен к изменениям в двигательной функции. Мы использовали PrAnCER для оценки изменения походки в острой модели галоперидола PD. Хотя галоперидол не вызывал ожидаемого дефицита двигателя надежной модели PD, мы, тем не менее, смогли продемонстрировать, что PrAnCER может точно обнаружить изменения в походке. Наконец, мы количественно точность PrAnCER и показали, что его измерения ключевых параметров походки сопоставима с ручной скоринга.
В обоих условиях лечения галоперидола, мы наблюдали высокую частоту замораживания поведения (акинезия), а затем избежать ответ работает или ограничивая вперед. Хотя акинезия наблюдается в аналогичной дозе (0,25 мг/кг) в нескольких исследованиях16,23, это ограничивающее поведение не согласуется с типичными симптомами Паркинсона3,14,19, 24. Интересно, что мы обнаружили, что высокая доза лечения галоперидола привела к значительно мухе длины шага. Этот вывод был первоначально удивительно, потому что другие модели галоперидола PD показали снижение длины шага3,19. Тем не менее, они имеют смысл в свете "бодрящий побег" поведение шаблон, описанный Де Ryck et al. (1980), который сообщил, что крысы бежать после акинетических периодов, и что высокая скорость походки, такие как бег и ограничивающие связаны с увеличением шаг длина4,25 (рисунок8C). Высокодозное лечение также привело к значительному увеличению максимальной области контакта задних лап. Низкая доза лечения галоперидола привела к более характерным изменениям походки PD, включая значительное увеличение продолжительности позиции и максимальной области контакта(рисунок 8A-B). Эти результаты могут быть отражением мышечной жесткости, связанной с галоперидол индуцированной акинезии.
Несмотря на необычное бодрящий побег поведение, мы смогли продемонстрировать, что PrAnCER действительно может обнаружить изменения в походке. Мы показали, что в правильных условиях освещения полупрозрачный пол может создать контрастное и детальное изображение лап. В настоящем исследовании, мы сделали прозрачный пол полупрозрачный, покрывая его веллумом. Такой же эффект можно было бы достичь, разместив другой полупрозрачный покрытие, например, Mylar, над прозрачным полом. Кроме того, сам пол может быть полупрозрачным, используя, например, матовые плексигласы. Полупрозрачный пол и простой плексиглас дорожки стоят недорого и могут быть построены во второй половине дня. Наша система анализа на основе обнаружения краев устойчива ко многим вариациям в аппарате и предлагает регулируемые пороги для адаптации системы к различным установкам, моделям заболеваний или более мелким животным, таким как мыши.
Некоторые анализы параметров походки были изменены с обычных формул из-за аспектов дорожки. Например, наш метод расчета скорости отличается от других исследований походки; полупрозрачный пол в сочетании со светодиодным освещением скрывает вид кузова, поэтому невозможно отследить положение кузова для расчета скорости, как это обычно делается. Для этого исследования скорость была рассчитана путем деления расстояния, пройденного между двумя контактами одной и той же лапы к тому времени, от первого контакта до второго контакта. Конечно, можно использовать и другие формулы. Например, если требуется общая мера скорости, можно разделить расстояние от среднего положения передних лап в начале и конце пробега на продолжительность пробега.
Наш анализ подтверждает, что, хотя наша автоматизированная система не идентична ручному баллу, она работает с высокой точностью и генерирует надежные показатели походки. Описанный здесь аппарат был оптимизирован для простого, недорогого анализа двигательной функции. Тем не менее, можно было бы внести ряд изменений, которые расширят полезность PrAnCER. Одним из ограничений нашей системы является то, что полупрозрачный пол, позволяя отличное обнаружение лап, скрывает ось тела животных. Хотя мы не сочли это необходимым, это можно было бы решить путем добавления накладной камеры в систему. Другим улучшением было бы использование видеокамеры с более высокой частотой кадров. Хотя мы смогли получить последовательную оценку временных параметров, точность этих мер скомпрометирована при частоте кадров ниже 100 кадров в секунду8. Добавление высокоскоростной видеокамеры не потребует каких-либо изменений программного обеспечения анализа при одновременном повышении точности и точности временных мер. Кроме того, несколько других систем походки используют зеркало для одновременнойзаписи бокового и вентрального взглядов на крысу 2,8,13. Добавление этой функции в наш аппарат позволит более точной количественной оценки скорости и лучшего наблюдения за поведением во время выполнения.
В этом исследовании мы показали, что использование полупрозрачного пола эффективно изолирует отпечатки лап, блокируя видимость объектов, не соприкасаемых с полом дорожки. Мы разработали автоматизированную систему скоринга, которая использует этот высокий контрастный отпечаток лапы для точного определения лап. Мы показали, что эта система, PrAnCER, количественно параметры походки с точностью сопоставимы с коммерческими системами. Мы определили, что введение высокой дозы галоперидола увеличивает длину шага и максимальную область контакта по сравнению с сольным раствором. Хотя это изменение является противоположностью того, что мы ожидали, дальнейший обзор существующей литературы показывает, что это, вероятно, часть побега поведение наблюдается в ответ на острое введение галоперидола. Низкая доза лечения галоперидола привело к более типичным симптомам PD, таким как увеличение продолжительности позиции и максимальная область контакта. Мы пришли к выводу, что в то время как острая высокая доза галоперидола администрации является плохой моделью для изучения походки нарушений, связанных с PD, наше исследование, тем не менее продемонстрировали способность PrAnCER точно обнаружить изменения в двигательной функции. В будущем мы надеемся на дальнейшую проверку PrAnCER, изучая изменения локомотивов в других моделях заболеваний.
Раскрытие информации
Авторы не имеют конфликта интересов раскрыть.
Благодарности
Эта работа была поддержана Карни Институт мозга науки в Университете Брауна.
Материалы
| Name | Company | Catalog Number | Comments |
| Gait Walkway Apparatus | |||
| 1/4" clear plexiglass | RISD 3D Store, Providence, RI | Approximate Price: $50 1 piece cut to 3 1/2" W x 36" L; 2 pieces cut to 4 1/2" W x 36" L Note: We made our walkway 36" long based off of an exisiting plexiglass table we had in house, it could easily be made longer if desired. | |
| 1/4" clear plexiglass | RISD 3D Store, Providence, RI | Approximate Price: $10 4 pieces, cut to 1" W by 4" L These will be used to keep the tunnel in place | |
| 10 series 80/20 framing pieces, 1" x 1" T-Slotted Profile | 80/20 Inc. | 1010-S | Approximate Price: $16 2 pieces cut to 36" L |
| 12V Flexible LED Strip Lights, 16.4ft/5m LED Light Strips, Daylight White | Amazon | Approximate Price: $10 | |
| Bostik Blu-Tack Adhesive | Amazon | Approximate Price: $8 | |
| Clearprint 1000H drafting vellum, 16 LB cotton fiber | Dick Blick Art Supplies | 11101-1046 | Approximate Price: $50 Cut to 4" W x 36" L Note: This particular vellum comes as a roll; we kept it on the roll and cut it to 4" W. Mylar or frosted plexiglass could also be used in place of the vellum, but the camera software detection settings would need to be adjusted. |
| Logitech HD Pro Webcam C920, 1080p | Amazon | Approximate Price: $50 | |
| Mobile Laptop Computer Desk Cart Height-Adjustable | Amazon | Approximate Price: $40 Small table to place the animals' home cage on at the end of the walkway. | |
| Plastic ramp | Pets Warehouse | Approximate Price: $6 Optional: Ramp to assist the animals descend into home cage | |
| RetiCAM Tabletop Tripod with 3-Way Pan/Tilt Head | Amazon | Approximate Price: $30 | |
| SCIGRIP #16 solvent cement for acrylic - clear, medium bodied | Amazon | Approximate Price: $8 | |
| Plexiglass table | Approximate Price: $ | ||
| 15 series 80/20 framing pieces, 1.5" x 1.5" T-Slotted Profile | 80/20 Inc. | 1515 | Approximate Price: $110 6 pieces cut to 36" L, 2 pieces cut to 12" With both ends tapped with standard 5/16-18 threads Framing for the plexiglass table top and table legs |
| 15 series 3 Way - Light Squared Corner Connector | 80/20 Inc. | 14177 | Approximate Price: $24 4 connectors To connect the table top and legs |
| 1/4" clear plexiglass sheet | RISD 3D Store, Providence, RI | Approximate Price: $50 Cut at 15" W x 39" L | |
| 5/16-18 x 1" Button Head Socket Cap Screw | 80/20 Inc. | 3118 | Approximate Price: $5 Quantity = 12 |
| Deluxe Leveling Feet, 5/16-18 x 2" | 80/20 Inc. | 2194 | Approximate Price: $50 Quantity = 4 For table legs |
| “T” Handle Ball End Hex Wrench, 3/16" | 80/20 Inc. | 6000 | Approximate Price: $5 |
Ссылки
- Lakes, E. H., Allen, K. D. Gait analysis methods for rodent models of arthritic disorders: reviews and recommendations. Osteoarthritis and Cartilage. 24 (11), 1837-1849 (2016).
- Lee, H. Y., Hsieh, T. H., Liang, J. I., Yeh, M. L., Chen, J. J. Quantitative video-based gait pattern analysis for hemiparkinsonian rats. Medical & Biological Engineering & Computing. 50 (9), 937-946 (2012).
- Zhou, M., et al. Gait analysis in three different 6-hydroxydopamine rat models of Parkinson’s disease. Neuroscience Letters. 584, 184-189 (2015).
- Batka, R. J., Brown, T. J., Mcmillan, K. P., Meadows, R. M., Jones, K. J., Haulcomb, M. M. The need for speed in rodent locomotion analyses. Anatomical Record. 297 (10), 1839-1864 (2014).
- Guillot, T. S., Asress, S. A., Richardson, J. R., Glass, J. D., Miller, G. W. Treadmill gait analysis does not detect motor deficits in animal models of Parkinson’s disease or amyotrophic lateral sclerosis. Journal of Motor Behavior. 40 (6), 568-577 (2008).
- Williams, M. T., et al. Kaolin-induced ventriculomegaly at weaning produces long-term learning, memory, and motor deficits in rats. International Journal of Developmental Neuroscience. 35, 7-15 (2014).
- Hamers, F. P. T., Koopmans, G. C., Joosten, E. A. J. CatWalk-assisted gait analysis in the assessment of spinal cord injury. Journal of Neurotrauma. 23 (3-4), 537-548 (2006).
- Kloefkorn, H. E., et al. Automated Gait Analysis Through Hues and Areas (AGATHA): A Method to Characterize the Spatiotemporal Pattern of Rat Gait. Annals of Biomedical Engineering. 45 (3), 711-725 (2017).
- Pereira, J. E., et al. A comparison analysis of hindlimb kinematics during overground and treadmill locomotion in rats. Behavioural Brain Research. 172 (2), 212-218 (2006).
- Nakamura, A., et al. Low-cost three-dimensional gait analysis system for mice with an infrared depth sensor. Neuroscience Research. 100, 55-62 (2015).
- Hamers, F. P., Lankhorst, A. J., van Laar, T. J., Veldhuis, W. B., Gispen, W. H. Automated quantitative gait analysis during overground locomotion in the rat: its application to spinal cord contusion and transection injuries. Journal of Neurotrauma. 18 (2), 187-201 (2001).
- Mendes, C. S., Bartos, I., Márka, Z., Akay, T., Márka, S., Mann, R. S. Quantification of gait parameters in freely walking rodents. BMC Biology. 13 (50), (2015).
- Machado, A. S., Darmohray, D. M., Fayad, J., Marques, H. G., Carey, M. R. A quantitative framework for whole-body coordination reveals specific deficits in freely walking ataxic mice. eLife. 4, (2015).
- Duty, S., Jenner, P. Animal models of Parkinson’s disease: a source of novel treatments and clues to the cause of the disease. British Journal of Pharmacology. 164 (4), 1357-1391 (2011).
- Kulkarni, S. K., Bishnoi, M., Chopra, K. In vivo microdialysis studies of striatal level of neurotransmitters after haloperidol and chlorpromazine administration. Indian Journal of Experimental Biology. 47 (2), 91-97 (2009).
- Jain, N. S., Tandi, L., Verma, L. Contribution of the central histaminergic transmission in the cataleptic and neuroleptic effects of haloperidol. Pharmacology Biochemistry and Behavior. 139 (Part A), 59-66 (2015).
- Steinpreis, R. E., Anders, K. A., Branda, E. M., Kruschel, C. K. The Effects of Atypical Antipsychotics and Phencyclidine (PCP) on Rotorod Performance. Pharmacology Biochemistry and Behavior. 63 (3), 387-394 (1999).
- Baptista, P. P. A., et al. Physical exercise down-regulated locomotor side effects induced by haloperidol treatment in Wistar rats. Pharmacology, Biochemistry, and Behavior. 104, 113-118 (2013).
- Chuang, C. S., Su, H. L., Cheng, F. C., Hsu, S., Chuang, C. F., Liu, C. S. Quantitative evaluation of motor function before and after engraftment of dopaminergic neurons in a rat model of Parkinson’s disease. Journal of Biomedical Science. 17 (9), (2010).
- Bugalho, P., Alves, L., Miguel, R. Gait dysfunction in Parkinson’s disease and normal pressure hydrocephalus: a comparative study. Journal of Neural Transmission. 120 (8), 1201-1207 (2013).
- Bradski, G. . The OpenCV Library. , (2000).
- Chen, H., Du, J., Zhang, Y., Barnes, K., Jia, X. Establishing a Reliable Gait Evaluation Method for Rodent Studies. Journal of Neuroscience Methods. 283, 92-100 (2017).
- De Ryck, M., Hruska, R. E., Silbergeld, E. K. Estrogen and haloperidol-induced versus handling-related catalepsy in male rats. Pharmacology, Biochemistry, and Behavior. 17 (5), 1027-1035 (1982).
- Bellardita, C., Kiehn, O. Phenotypic Characterization of Speed-Associated Gait Changes in Mice Reveals Modular Organization of Locomotor Networks. Current Biology. 25 (11), 1426-1436 (2015).
- De Ryck, M., Schallert, T., Teitelbaum, P. Morphine versus haloperidol catalepsy in the rat: a behavioral analysis of postural support mechanisms. Brain Research. 201 (1), 143-172 (1980).
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеСмотреть дополнительные статьи
This article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены