
Method Article
Измерительная система непрерывного распространения волн - тестирование, верификация и измерения
В этой статье
Резюме
В настоящем отчете описывается установка, валидация и верификация, а также результаты измерений распространения с использованием непрерывно-волновой системы измерения радиочастотного зондирования.
Аннотация
Канальные эхолоты используются для измерения характеристик каналов радиосистем. Сегодня используется несколько типов канальных эхолотов: непрерывно-волновые (CW), прямые импульсные, частотная область с использованием векторного анализатора цепей (VNA), корреляционные и кросс-коррелятор с задержкой времени. Каждый из них имеет уникальные преимущества и недостатки. Системы ХО имеют больший динамический диапазон, чем другие системы, с сигналом, который может распространяться дальше в окружающую среду. Поскольку частота дискретизации звука позволяет использовать файлы меньшего размера, чем в других системах, сбор данных может быть непрерывным и длиться в течение нескольких часов. В этой статье обсуждается система эхолота CW-канала, которая использовалась для проведения многочисленных измерений потерь распространения в различных городах Соединенных Штатов Америки. Такие измерения распространения должны быть точными, воспроизводимыми и свободными от артефактов или предубеждений. В этой статье показано, как настроить измерение, как проверить и проверить, что система делает надежные измерения, и, наконец, она показывает результаты некоторых измерительных кампаний, таких как измерения повторяемости, измерения потерь беспорядка (где потеря беспорядка определяется как избыточная потеря от потерь передачи свободного пространства) и измерения взаимности.
Введение
Институт телекоммуникационных наук (ITS) является исследовательской лабораторией Национального управления телекоммуникаций и информации (NTIA), агентства Министерства торговли США. ITS имеет долгую историю проведения точных, хорошо зарекомендовавших себя измерений распространения радиочастот (RF). Расширение совместного использования спектра сопровождается необходимостью точных, воспроизводимых измерений, которые обеспечивают лучшее понимание радиосреды, которую должны будут использовать многочисленные службы. В течение последних нескольких лет военные службы разрабатывают соглашения о совместном использовании спектра с коммерческими операторами беспроводной связи в диапазоне Advanced Wireless Services (AWS)-3 (1755-1780 МГц)1. Это позволит коммерческим операторам беспроводной связи использовать диапазон AWS-3 до постепенного выхода военных сервисов из диапазона. Использование диапазона будет координироваться как географическими изолирующими системами, так и моделированием сценариев частотных помех. Чтобы разделить эту полосу спектра, измерения распространения необходимы для разработки и улучшения моделей распространения для оценки радиочастотных помех между военными и коммерческими беспроводными системами в пределах диапазона.
Организация Defense Spectrum Organization (DSO) отвечает за управление переходом на AWS-3 и поручила ITS и другим организациям выполнить серию измерений с использованием каналов. Эти измерения будут использоваться для построения новых моделей для расчета воздействия листвы и искусственных структур на окружающую среду (в совокупности известных как беспорядок). Улучшенное моделирование распространения, которое учитывает беспорядок, может привести к уменьшению ограничений на коммерческие передатчики в непосредственной близости от военных систем. Система CW-канал-эхолот, обсуждаемая в этой статье, использовалась в течение последних пяти лет для сбора данных измерений распространения радио и расчета затухания беспорядка. Эта система измерений дает точные, воспроизводимые и непредвзятые результаты, и DSO призвала ITS делиться своими институциональными знаниями, включая лучшие методы измерения для измерения и обработки данных о распространении радиочастот, с более широким техническим сообществом.
Лучшие методы измерения требуют понимания системы от уровня компонентов до уровня собранной системы. Эти передовые методы измерений были задокументированы в недавно опубликованном Техническом меморандуме NTIA TM-19-5352, в котором описывается набор передовых методов подготовки и проверки систем измерения распространения радио. Its недавно завершила статью JoVE о калибровке VNA, используемой для измерения потерь компонентов и выявления плохих компонентов для этой измерительной системы3. Эта статья является продолжением документирования этих лучших методов измерения для более широкого сообщества. Хотя в этой статье обсуждаются лучшие практики для эхолота CW-канала, эти же методы могут быть использованы для проверки других систем канального эхолота: систем VNA; Системы ХО; системы с полной пропускной способностью, основанные на корреляции; системы прямых импульсов; и системы на основе скользящих корреляторов4,5,6.
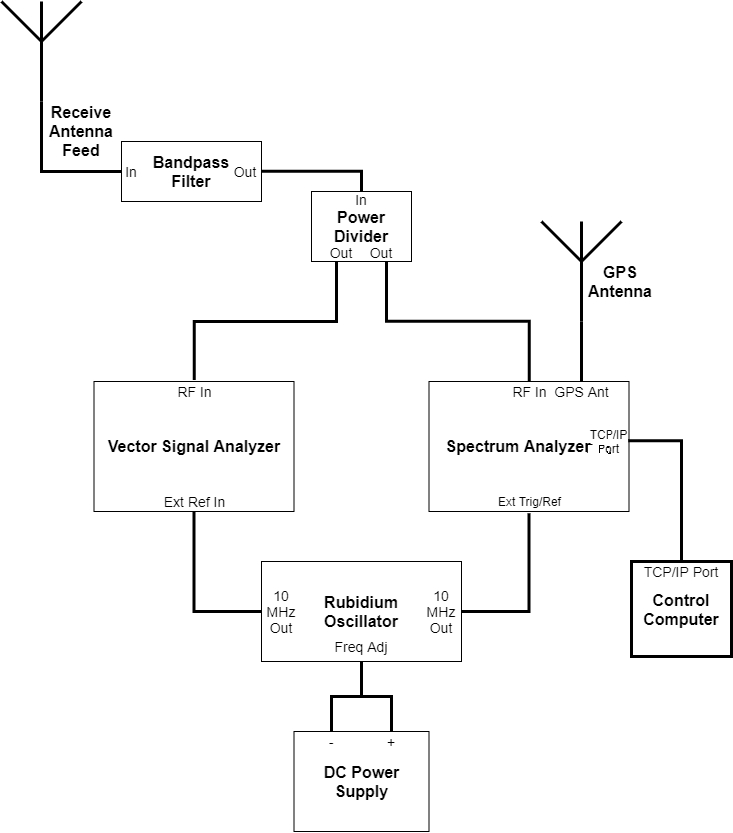
В данной статье подробно описано, как настроить систему измерения эхолота CW-канала с использованием векторного анализатора сигналов (VSA), анализатора спектра (SA), двух рубидиевых генераторов, измерителя мощности, векторного генератора сигналов (VSG) и различных фильтров и делителей мощности для измерений в наружной измерительной среде7,8. Передающая сторона системы состоит из VSG, который генерирует сигнал CW, который усиливается усилителем мощности. Затем он разделяется направленной парой, чтобы направить часть сигнала на измеритель мощности, что позволяет пользователю контролировать выход системы. Остальная часть сигнала отправляется на приемную сторону системы по каналу распространения. Приемная сторона состоит из фильтра нижних частот для уменьшения помех и гармоник, создаваемых усилителем мощности. Отфильтрованный сигнал разделяется в делитель мощности и подается в SA для мониторинга во время измерения вместе с отметкой времени и местоположением глобальной системы позиционирования (GPS). Другая половина сигнала отправляется в VSA для преобразования в внутрифазные квадратурные (I-Q) данные в диапазоне 1-5 кГц. Частота дискретизации определяется диапазоном прибора9 и ориентируется на ожидаемые доплеровские сдвиги спектра, которые являются функцией скорости транспортного средства. Полученные временные ряды затем передаются на компьютер для постобработки и анализа данных.
Рубидиевые часы используются как на передатчике, так и на приемнике для обеспечения высокоточных измерений и высокостабильных частот. Рубидиевые часы на приемном конце имеют тонкую регулировку частоты для точного выравнивания частот передачи и приема. Как правило, частоты настраиваются так, чтобы они находились в пределах 0,1 Гц друг от друга для тестирования. Рубидиевые часы необходимы для высокоточных измерений распространения ХО. Они обеспечивают точную точность базы времени в ходе измерений и предотвращают дрейф частоты передатчика и приемника. В этой статье также подробно описывается, как проверить и проверить, что система делает точные измерения в лабораторных условиях, как с антенной, так и без нее, прежде чем проводить измерения в наружной среде. Система использовалась для обширной серии наружных и внутренних испытаний на частотах от 430 МГц до 5,5 ГГц и для многих различных передающих мощностей7,8,10.
протокол
ПРИМЕЧАНИЕ: Система эхолота канала ITS показана на рисунках 1 и 2, а настольная оценочная установка показана на рисунке 3. Обратитесь к этим цифрам при настройке эхолота CW-канала, чтобы убедиться, что все компоненты правильно настроены. В следующих разделах объясняется, как проверить и валидировать систему перед проведением измерений.
1. Настройка измерительной системы
ПРИМЕЧАНИЕ: В этом разделе описывается, как система настраивается для полевых измерений. Во-первых, потери системы как на передающей, так и на принимающей стороне системы должны учитываться и измеряться отдельно до сборки всей системы. Затем собирается вся система, а отдельные приборы конфигурируются, калибруются и синхронизируются для подготовки к лабораторной проверке и валидации.
- Измерьте S-параметры с помощью VNA2 для отдельных компонентов системы перед сборкой системы: кабелей, аттенюаторов, разветвителей мощности, направленных соединителей и фильтров нижних частот.
ПРИМЕЧАНИЕ: Это будет характеризовать потери и идентифицировать сломанные кабели или устройство, не соответствующее спецификации. - Соберите кабель типа N на выходе усилителя мощности, направленного соединителя, полосового фильтра и кабеля типа N, который будет подключен к антенне, и используйте VNA для измерения цепи компонентов.
ПРИМЕЧАНИЕ: Это измерение будет включать внутренние отражения, которые не видны при измерении отдельных компонентов с помощью VNA. - Запишите значение S21 , которое будет отрицательным числом, и будет использоваться в качестве потерь передающей системы. Используйте эти значения для коррекции уровня принятого сигнала, описанного в разделе репрезентативных результатов.
- Настройка передающей системы
- Подключите все устройства к источнику питания: либо источнику бесперебойного питания (ИБП), либо набору розеток с защитой от перенапряжений. Убедитесь, что все инструменты находятся в выключенном состоянии при подключении компонентов друг к другу.
- Соберите передающее оборудование (рисунок 1).
- Подключите выход рубидиевого генератора с частотой 10 МГц к порту Ref IN VSG с помощью кабеля Байонет-Нил-Консельман (BNC). Подключите порт RF OUT VSG к входу порта IN направленного соединителя с помощью кабеля типа N. Усилитель мощности не вставляется до шага протокола 3.2.
- Подключите выходной порт направленного соединителя к входному порту соответствующего полосового фильтра (при необходимости) с помощью разъема типа N к гнезду.
ПРИМЕЧАНИЕ: Полосовой фильтр используется для минимизации гармонических частот в других диапазонах.
- Соберите кабель типа N, который будет подключен к приемной антенне, фильтру, кабелю между фильтром и разветвителю питания, а также кабелю типа N, который будет подключен к VSA; использовать VNA для измерения этой системы компонентов.
- Выполните то же измерение, но через те же компоненты, подключенные к SA. Запишите значения S21 , которые будут использоваться в качестве потерь приемной системы на стороне VSA сплиттера мощности и на стороне SA разветвителя мощности. Используйте эти значения для коррекции уровня принятого сигнала, описанного в разделе репрезентативных результатов.
- Настройка приемной системы
- Подключите все устройства к источнику питания: ИБП или набор розеток с защитой от перенапряжений. Убедитесь, что все инструменты находятся в выключенном состоянии при подключении компонентов друг к другу.
- Соберите приемное оборудование (рисунок 2).
- Подключите кабель типа N к входу полосового фильтра. Подключите выход полосового фильтра к входу делителя мощности (порт 1).
- Подключите порт 2 делителя питания к порту RF IN на VSA. Подключите порт 3 делителя питания к порту RF IN на SA.
- Используя кабель BNC для банановой штепсельной вилки, подключите частотный adj рубидиевого генератора к выходу постоянного тока (DC) источника питания.
- Подключите выход рубидиевого генератора на частоте 10 МГц к порту Ext Ref In на VSA с помощью кабеля BNC. Подключите выход рубидиевого генератора с частотой 10 МГц к порту Ext Trig/Ref In анализатора спектра.
- Включите VSG и убедитесь, что он настроен на RF OFF. Включите измеритель мощности. Включите все приборы и дайте им прогреться в течение часа, прежде чем делать какие-либо измерения.
- Настройте VSA в режиме VSA 89601B. Находясь в режиме VSA, установите центральную частоту на интересующую частоту CW. Наконец, выберите количество точек, взятых с учетом желаемой длины общего измерения.
ПРИМЕЧАНИЕ: Хотя система работает с использованием CW, диапазон должен быть установлен для захвата любых доплеровских сдвигов и затухания. Полоса пропускания разрешения определяет фильтр, используемый VSA для измерения мощности, когда он проходит через частотный диапазон, поэтому выбор полосы пропускания с низким разрешением позволяет более точно измерять. В качестве компромисса, более низкая пропускная способность разрешения занимает больше времени на точку. - Настройте VSA со следующими параметрами: выберите режим VSA 89601B; центральная частота: частота МГц (например, 1770 МГц); размах: 3 кГц; ВремяЛен: 1 с; ResBW: 3,81938 Гц; NumPts: max (491026 pts, 409601 pts) - зависит от VSA; ГСЧ: -42 дБм; верхнее значение шкалы верхнего графика: -30 дБм.
- Убедитесь, что SA управляется программным обеспечением управления приборами, которое использует программируемые стандартные команды для команд программируемых приборов (SCPI), чтобы можно было собирать и сохранять непрерывные развертки.
- Установите SA таким образом, чтобы начальная и стоп-частота соответствовали центральной частоте VSA. Поскольку RBW аналогичным образом определяет размер фильтра, используемого SA, установите для RBW то же значение, что и диапазон измерения VSA.
- Установите пропускную способность видео на то же значение, что и пропускную способность разрешения и режим обнаружения для выборки для записи неавергированных данных. Оставьте затухание выключенным, убедившись, что SA не будет перегружен, и держите предусилитель включенным.
- Настройте SA со следующими параметрами для каждой развертки: StartFreq: та же центральная частота, что и в настройках VSA (например, 1770 МГц); StopFreq: та же центральная частота, что и в установке VSA (например, 1770 МГц); RBW (МГц): 0,003; VBW (МГц): 0,003; детектор: образец; время развертки: 500 мс; очков/трассировка: 461; предусилитель ВКЛ; затухание: 0; автоматическое затухание: Выкл.
- На странице SA нажмите клавишу ВВОД для доступа к меню. Включите внешнюю ссылку, нажав кнопку Shift и выбрав кнопку System на анализаторе спектра. Затем выберите Дополнительные | настройки портов | Внешний входной | Ссылка с помощью программных клавиш рядом с экраном.
- Настройте VSG, выбрав выход CW.
- Установите частоту на 1770 МГц. Для определения линейного диапазона усилителя мощности следуйте процедуре, описанной в разделе 4.22 .
- Установите выходную амплитуду VSG на -4 дБм, верхний предел линейного диапазона усилителя мощности.
- Откалибруйте измеритель мощности.
- Подключите головку измерителя мощности к опорному порту (канал A или B), а другой конец измерителя мощности — к измерительному порту.
- Установите частоту измерителя мощности на 1770 МГц для опорного порта, используемого выше. Обнулите и откалибруйте измеритель мощности. Убедитесь, что показания измерителя мощности остаются в пределах 0,2 дБ от 0 дБм.
- Отсоедините головку измерителя мощности от опорного порта и подключите головку измерителя мощности к выходу аттенюатора, показанного на рисунке 1.
- Калибровка VSA: утилиты | Калибровочный | Калибровка. Включите ВЧ на VSG.
ПРИМЕЧАНИЕ: Убедитесь, что на анализаторе спектра есть сигнал. Если уровень сигнала падает до -120 дБм, внешний индикатор не включен. Если сигнал слишком сильный, он перегрузит принимающую систему и повредит либо VSA, либо SA. Помните о максимальных уровнях входного сигнала (обычно показанных на передней панели прибора) и оставайтесь по крайней мере на 10 дБ ниже этого уровня. - Синхронизируйте рубидиевые генераторы, установив напряжение, но не превышайте максимальное входное напряжение, разрешенное на порту синхронизации рубидия.
- Измените TimeLen на верхнем графике на экране VSA на 100 мс. Установите для оси Y на нижнем графике значение I-Q.
- Нажмите Ток/Напряжение на передней панели блока питания. Меняйте напряжение понемногу за раз и наблюдайте за точкой на экране VSA: если она вращается вперед и назад, ничего не делайте, частоты выравниваются. Если он вращается в одном направлении последовательно, изменяйте показания измерителя мощности (напряжения) до тех пор, пока точка на графике I-Q не начнет замедляться, и она медленно движется вперед и назад (движение маятника) (рисунок 4).
- Установите значение TimeLen на верхнем графике на экране VSA равным 1 с, а ось Y — величине журнала.
- Возьмите 10 записей сбора на SA, чтобы убедиться, что все параметры были установлены правильно, и что уровень сигнала на экране SA соответствует уровню сигнала на нижнем экране VSA.
2. Лабораторная верификация и валидация
- Не прикрепляя антенны, вставьте переменный аттенюатор между передающей стороной системы и приемной стороной системы (рисунок 5). Извлеките усилитель мощности из измерительной установки для этой проверки.
- Установите для ступенчатого затухания аттенюатора значение 0 дБ, а для записи на входе VSA > Recording — 120.
ПРИМЕЧАНИЕ: Одна запись равна TimeLen , установленной на VSA. - Установите количество разверток на SA равным 120 записям. Измените выходную амплитуду VSG на 0 дБм и нажмите кнопку RF ON на VSG.
- Установите пиковый маркер, чтобы найти значение силы сигнала, и убедитесь, что сигнал виден на VSA. Запустите VSA, нажав кнопку Запись в верхней части экрана. Запустите измерение SA с помощью программного обеспечения для управления прибором.
- Измените шаговый аттенюатор на 10 дБ и повторите шаги 4–10. Просмотрите все настройки ступенчатого аттенюатора и запишите значения для каждого параметра затухания.
ПРИМЕЧАНИЕ: По мере приближения аттенюатора к 90-110 дБ сигнал будет становиться более шумным по мере приближения к системному шумовому полу прибора. Значения измерений вблизи уровня шума системы будут сильно варьироваться. - Чтобы проверить уровни принятого сигнала VSA, вычислите среднее значение окна 0,5 с до записи VSA 120 с и усредните каждую развертку SA. Добавьте уровень выходной мощности VSG, потери передающей стороны и принимающей стороны системы, а также настройку ступенчатого аттенюатора.
ПРИМЕЧАНИЕ: Значение вышеупомянутой суммы на шаге 2.6 должно равняться усредненным уровням принимаемого сигнала, регистрируемым VSA и SA в пределах 0,5 дБ, для ступенчатых затуханий менее 80 дБ. Если они этого не сделают, вернитесь назад и переоцените потери системы.
3. Полевые измерения
ПРИМЕЧАНИЕ: Всегда тестируйте и проверяйте систему перед каждой измерительной кампанией.
- Выполните этапы 1.1-1.3 перед каждой новой кампанией измерений и настройте передающую сторону системы, как это обсуждается в разделе 1.4.
ПРИМЕЧАНИЕ: Обычно он размещается в сотовой сети на колесах (COW), которая остается фиксированной во время измерений. - Подключите усилитель мощности между VSG и направленным соединителем, как описано в шаге 1.4.2.1.
- Используйте направленный соединитель, который может обрабатывать уровни мощности, генерируемые усилителем мощности. Добавьте аттенюатор 50 дБ к направленному соединителю на подключенном порту, чтобы он оставался в пределах заданных входных уровней мощности измерителя мощности, и подключите измеритель мощности к этому порту. Подключите выходной кабель типа N от направленного соединителя к передающей антенне.
- Настройте приемную сторону системы, как описано в шагах 1.5-1.6, внутри подвижного транспортного средства. Подключите приемную антенну к кабелю типа N, подключенному к фильтру.
- В дополнение к шагам настройки SA 1.11.3-1.11.4, GPS-антенна должна быть настроена в SA.
- Включите запись GPS: Настройки Meas | Включить | записи GPS Стандартный GPS.
- Включите GPS на анализаторе спектра, удерживая кнопку Shift и нажимая кнопку System на анализаторе спектра. Затем выберите Дополнительные | GPS | GPS-ON & GPS Info-ON с помощью программных клавиш возле экрана.
- Разместите GPS-антенну на крыше приемника измерительного автомобиля. Убедитесь, что измерительное программное обеспечение также считывает строки NMEA с GPS для каждой развертки.
- Продолжите настройку, как описано в шагах 1.11-1.17, и установите количество записей на входном | VSA Запись основана на расчетном времени измерения. Установите количество записей SA на количество записей VSA плюс около 300 записей, отметив, что SA проходит медленнее, чем VSA.
- Начните измерение, сначала запустив VSA, нажав кнопку «Запись » в верхней части экрана. Инициируйте измерение анализатора спектра.
- После измерения сохраните файл записи VSA | Сохранить | Сохраните запись. Сохранение параметров | Сохранение заголовков с данными. При сохранении файла добавьте _VSA в конец файла. Измените имя файла данных анализатора спектра, чтобы оно соответствовало имени файла VSA, но добавьте _SA для анализатора спектра.
Результаты
Следующие результаты были получены в ходе полевой проверки представленной системы. Передатчик был расположен на Kohler Mesa за Лабораторией Министерства торговли Боулдера в Боулдере, штат Колорадо. Приемник проезжал через Боулдер, штат Колорадо, на специально разработанном измерительном транспортном средстве (см. Рисунок 6), и проводились непрерывные измерения. SA хранит скрытые данные в формате величины журнала в структуре данных о событии, в то время как данные GPS хранятся в отдельной структуре данных о событиях в том же файле. Пример данных для одной развертки показан на рисунке 7. Сохраненные данные преобразуются в линейную мощность в ваттах; среднее вычисляется для всех точек в этой развертке, а затем преобразуется обратно в величину журнала. Информация GPS присваивается этому среднему значению для развертки, показанной красным X при значении −71,5 дБм. Этот процесс выполняется для каждой очистки в файле.
Затем данные I-Q основной полосы частот от VSA обрабатываются, как показано в уравнении 1. Мощность в дБм рассчитывается для каждого образца I-Q. На этом шаге VSA собирает пиковые данные, которые должны быть преобразованы в дБм.
 (1)
(1)
Во время измерения данные I-Q основной полосы сохраняются во временном файле. VSA не получает информацию GPS. Длина файла выбирается таким образом, чтобы количество запрашиваемых записей было равно количеству секунд дискового времени. После завершения измерения данные записываются в файл, структура которого предварительно запрограммирована разработчиками программного обеспечения VSA. Данные, сохраненные в этом файле, включают разницу во времени между выборками измерений, частоту и сложные образцы данных. Этап обработки включает в себя сглаживание величины данных I-Q основной полосы частот в окне 500 мс для всего набора данных, чтобы приблизиться к 40-волновому расстоянию движения. На рисунке 8 показано, как сглаженная средняя мощность сравнивается с необработанными данными для большей части драйв-теста. Необработанные данные показаны синей трассировкой, а сглаженная средняя мощность показана красным следом.
Наборы данных VSA и SA выравниваются с помощью круговой свертки. Точка данных VSA в каждую секунду выравнивается с образцами SA, генерируемыми в каждую секунду для передачи координат GPS из SA в точки данных VSA. Модель линейной регрессии выравнивает данные, сводя к минимуму остатки между измеренными уровнями мощности двух наборов данных. Выровненные данные представляются путем построения мощности SA в дБм по оси x и мощности VSA в дБм по оси Y (рисунок 9). Поскольку уровень шума системы SA выше, чем уровень шума системы VSA, на графике будет показана кривизна вниз в точках ниже примерно -115 дБм для наборов данных вблизи уровня шума. На рисунках 9 и 10 показано выравнивание мощности VSA и мощности SA по сравнению с затраченным временем в секундах. Метка времени GPS от средней мощности SA затем прикрепляется к первой точке данных ряда данных средней сглаженной мощности VSA. Вертикальное смещение между двумя наборами данных устраняется путем корректировки потерь кабеля от делителя мощности к SA; однако, поскольку используются только данные VSA с отметкой времени, этот дополнительный шаг не нужен. Затем эти данные сохраняются и используются в модели Лонгли-Райса/нерегулярной местности (ITM)11,12 для прогнозирования потерь рельефа местности. Данные VSA корректируются путем сложения системных потерь и удаления системных усилений для получения измеренных базовых потерь передачи (BTL) или базового усиления передачи (BTG) вдоль маршрута привода, как показано на рисунке 11 и рисунке 12 и задано уравнением 2.
 (2)
(2)
где BTL - основные потери передачи, Pt и Pr - передающие и приемные мощности в дБм, Gt и Gr - выигрыш передающей и приемной антенн в дБи, соответственно, а Lt и Lr - системные потери для передающей системы и приемной системы в дБ, соответственно.
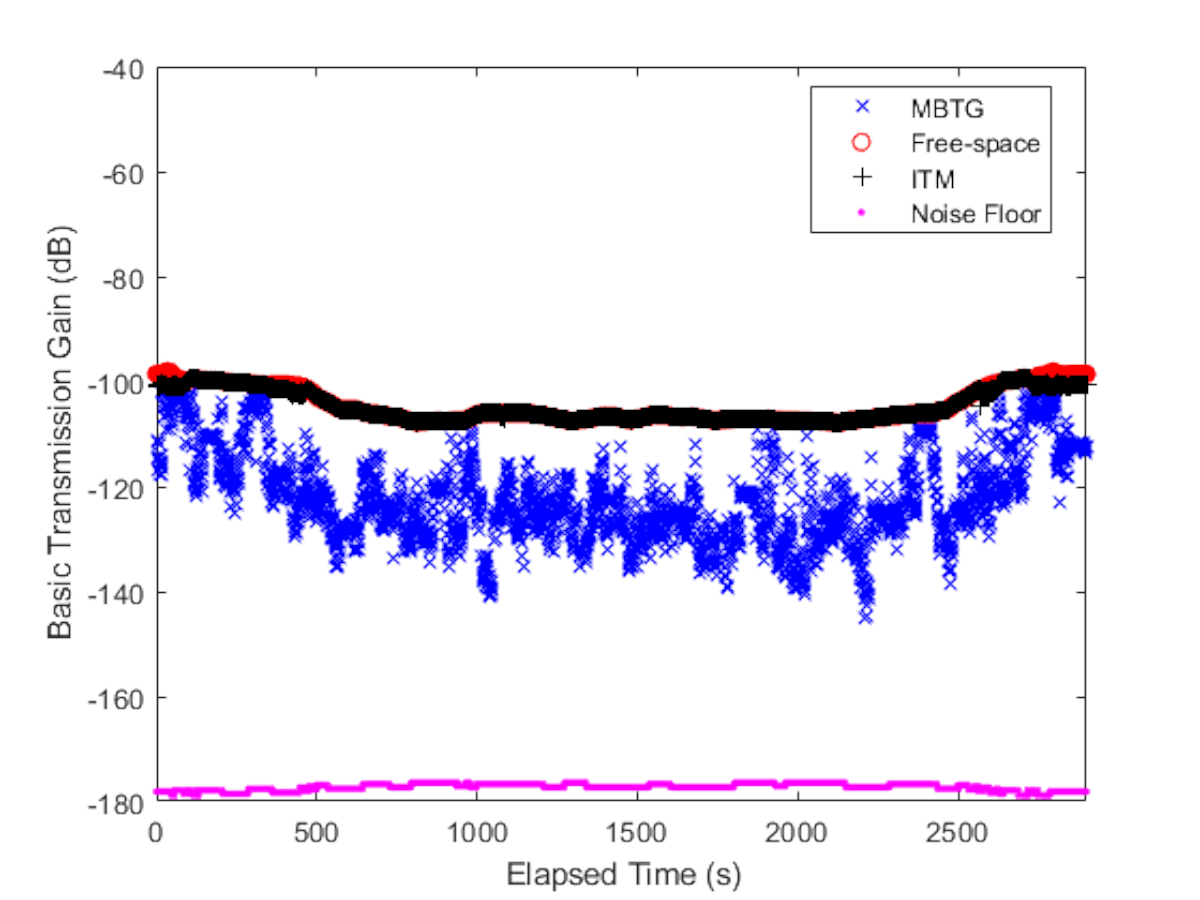
На рисунке 11 фиолетовая звезда является местом передачи. Желтые и фиолетовые точки представляют собой самый высокий и самый низкий уровни принимаемого сигнала соответственно. График измеренной BTG (черные x), смоделированной ITM BTG (синие +), коэффициент усиления передачи в свободном пространстве (FSTG) (красные круги) и системного шумового пола (розовые точки) показан на рисунке 12. Когда ITM BTG равен FSTG, нет никаких взаимодействий с местностью, и можно предположить, что все потери (разница между FSTG и MBTG) происходят от зданий, листвы или других взаимодействий с окружающей средой. Это показано на рисунке 13, где черная линия представляет собой местность, вытянутую из базы данных местности USGS13, красная пунктирная линия представляет собой линию прямой видимости (LOS) между передающей антенной и приемной антенной, а синие, пунктирные и пунктирные линии - это верхняя и нижняя первая зоны Френеля14 , где локализована большая часть энергии.

Рисунок 1: Схема передающих компонентов и соединений. Передающая сторона непрерывно-волнового (CW)-канального эхолота. Сокращения: RF = радиочастота; Ссылка = ссылка. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 2: Схема приемных компонентов и соединений. Приемная сторона эхолота непрерывно-волнового (CW) канала. Сокращения: GPS = Глобальная система позиционирования; RF = радиочастота; Ext Ref = внешняя ссылка; GPS Ant = GPS антенна; Ext Trig/Ref = внешний триггер/ссылка; TCP/IP = протокол управления передачей/интернет-протокол; Freq Adj = Частотно-регулируемый; DC = постоянный ток. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 3: Система зондирования каналов CW в лаборатории. Настольное развертывание канального эхолота Института телекоммуникационных наук (ITS) для валидации системы и тестирования точности, показывающего основные компоненты. Сокращения: VSA = векторный анализатор сигналов; VSG = векторный генератор сигналов. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 4: Дисплей I-Q. Регулировка частоты с использованием внутрифазного и квадратурного (I-Q) графика. Сокращения: CW = непрерывная волна; TimeLen = продолжительность времени; I-ось = внутрифазная ось; Ось Q = квадратурная ось. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 5: Настройка системы верификации и валидации. Настройка системы для поверочных и валидационных измерений. Сокращения: I-Q = внутрифазный квадратура; RF = радиочастота; Ref = ссылка; GPS = глобальная система позиционирования; Ext Trig/Ref = внешний триггер/ссылка; TCP/IP = протокол управления передачей/интернет-протокол; Freq Adj = скорректированная частота; DC = постоянный ток. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 6: Сотовый на колесах (COW) и измерительный фургон. Фотография, показывающая зеленый фургон, используемый для приемной системы и сотовой связи на колесах (COW), используемый для размещения передающей системы. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 7: Развертка анализатора спектра и средняя развертка. Одиночная развертка для сбора данных анализатора спектра, состоящая из 461 точки за время развертки 0,5 с. Аббревиатура: SA = анализатор спектра. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 8: Векторный анализатор сигналов получил мощность и скользящую среднюю. Данные о величине в фазе и квадратуре (I-Q) (синяя трассировка) для небольшого среза большего пробега по сравнению со средней мощностью (красная трассировка), рассчитанной за окно 0,5 с. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 9: Выравнивание сигналов VSA и SA. Выравнивание мощности векторного анализатора сигналов и мощности анализатора спектра. Сокращения: VSA = векторный анализатор сигналов; SA = анализатор спектра. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 10: VSA и SA получают питание после выравнивания сигнала. Выровненная мощность векторного анализатора сигналов и мощность анализатора спектра по отношению к затраченному времени в секундах. Сокращения: VSA = векторный анализатор сигналов; SA = анализатор спектра. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 11: Геолокация измеренного основного коэффициента усиления передачи. Измерено базовое усиление трансмиссии по маршруту движения. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 12: Измерено и смоделировано базовое усиление трансмиссии. Измеренное базовое усиление передачи (синие x), базовое усиление передачи (BTG) модели нерегулярной местности (ITM), усиление передачи в свободном пространстве (красные круги) и уровень шума системы (розовые точки) по сравнению с истекшим временем вдоль маршрута движения. Сокращения: MBTG = измеренный базовый коэффициент усиления передачи; ITM = модель неровной местности. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}

Рисунок 13: Профиль местности и первая зона Френеля. Профиль местности Геологической службы США (черная линия) за прошедшее время 1636,2 с. Верхняя (первая) зона Френеля (синяя, пунктирная линия) и нижняя (первая) зона Френеля (синяя, пунктирная линия) также строятся вместе с линией прямой видимости (красная, пунктирная линия) между передающей антенной и приемной антенной. Сокращения: USGS = Геологическая служба Соединенных Штатов; NED = национальная база данных высот. Пожалуйста, нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
{kind=link}
Обсуждение
Очень важно протестировать систему, как описано в этом протоколе, прежде чем пытаться сделать измерения в наружной среде. Таким образом, любые плохие компоненты или нестабильности могут быть прослежены и идентифицированы в измерительной системе и могут быть устранены. Критическими шагами в этом протоколе являются: 1) сначала протестировать отдельные компоненты и убедиться, что они работают в соответствии со своей спецификацией, 2) собрать передающую и приемную стороны отдельно и протестировать цепочку компонентов, 3) собрать передающую и приемную сторону, вставив ступенчатый аттенюатор и измерив уровни сигнала по мере изменения затухания, чтобы убедиться, что уровни принятого сигнала в VSA и SA рассчитаны. Дальнейшее устранение неполадок может быть выполнено с помощью VSG, такого как показанный в Таблице материалов, который имеет возможность генерировать моделирование затухания, которое может быть использовано для тестирования системы с использованием смоделированных форм сигналов в различных затухающих средах, встречающихся в реальных средах распространения. Как только измерительная система работает правильно, измерения могут быть сделаны в наружной среде с уверенностью, что измерения будут точными.
Другим важным шагом является мониторинг мощности передачи на протяжении всего измерения, чтобы убедиться, что система работает правильно. Усилитель мощности характеризуется и тестируется отдельно, чтобы понять его линейность и внеполосные спектры излучения. Усилитель мощности может быть проверен на столешнице вместе с остальной частью установки, но необходимо позаботиться о том, чтобы уменьшить мощность сигнала ниже максимальной номинальной мощности на VSA с использованием аттенюаторов с соответствующим номинальным рейтингом. Ни GPS-антенна, ни ее настройки не должны использоваться для лабораторной проверки и валидации. Поскольку экран VSA не способен обеспечить мониторинг окружающей среды в режиме реального времени, добавление SA в качестве монитора в реальном времени помогает определить текущее состояние системы. Существует несколько типов систем измерения канального зондирования для захвата характеристик каналов для радиосистем: CW, прямой импульс, частотная область с использованием VNA, основанный на корреляции, кросс-коррелятор с задержкой времени.
Одним из ограничений этой системы является то, что сигнал CW, исследующий локальную среду, не содержит информации о временной области, такой как профили задержки времени. Профиль временной задержки дает информацию о времени отражения источника сигнала в локальной среде. Однако преимущество использования сигнала CW заключается в том, что легче получить разрешение на передачу на одной частоте в различных диапазонах, используя узкополосный сигнал CW, а не пытаться передать широкополосный сигнал. Системы CW могут иметь больший динамический диапазон, чем другие системы, и сигнал обычно может распространяться дальше в окружающей среде. Сигнал CW также имеет частоту дискретизации звука, что приводит к меньшим размерам файлов, чем другие типы систем зондирования каналов. С помощью этой системы сбор данных является непрерывным и может длиться в течение нескольких часов. Измерительная система CW-канала может использоваться на разных частотах, в зависимости от диапазона различных собранных компонентов. Система может использоваться в наружной среде распространения или в внутренней среде распространения15.
Благодарности
Спасибо Управлению оборонного спектра (DSO) за финансирование работы, представленной в этой статье.
Материалы
| Name | Company | Catalog Number | Comments |
| Cabling | Micro-Coax | Various lengths | |
| Directional Coupler | Anatech Electronics, Inc. | AM1650DC833 | |
| Filter 1 | K&L Microwave, Inc. | 8FV50-1802-T95-O/O | |
| GPS Antenna | Trimble | SMA connection to SA | |
| Instrument Control & Processing Software | MATLAB | Used to store and process measurement data | |
| Power Amplifier | Ophir RF | 5263-003 | |
| Power Divider | Mini-Circuits | ZAPD-20+ | |
| Power Meter and Power Sensor | Keysight | E4417A/E4412A | |
| Receiving Antenna | Cobham | OA2-0.3-10.0V/1505 | |
| Rubidium Frequency Standard | Stanford Research Systems | FS725 | |
| SA | Agilent | N9344C | |
| Transmitting Antenna | COMTELCO | BS1710XL6 | |
| Vector Signal Generator | Rohde & Schwarz | SMIQ | |
| VSA | Keysight Technologies | N9030A |
Ссылки
- Commerce Spectrum Management Advisory Commmittee. . 1755-1850 MHz Airborne Operations: Air Combat Training System Sub-Working Group Final Report. , (2014).
- Best practices for radio propagation measurements. NTIA Technical Memo TM-19-535. U.S. Dept. of Commerce Available from: https://www.its.bldrdoc.gov/publications/3211.aspx (2018)
- Hammerschmidt, C. A., Johnk, R. T., Tran, S. Calibration of a Vector Network Analyzer for Measurements in Radio Frequency Propagation Channels. Journal of Visualized Experiments. (160), e60874 (2020).
- Channel sounder measurement verification: conducted tests. NTIA Joint Report JR-20-549. U.S. Department of Commerce Available from: https://www.its.bldrdoc.gov/publications/3241.aspx (2020)
- Molisch, A. . Wireless communications. 2nd edition. , (2010).
- Anderson, C. R. Design and implementation of an ultrabroadband millimeter-wavelength vector sliding correlator channel sounder and in-building multipath measurements at 2.5 & 60 GHz. Virginia Polytechnic Institute and State University. , (2002).
- Johnk, R., Hammerschmidt, C. A., Stange, I. A high-performance CW mobile channel sounder. Proceedings of the 2017 IEEE International Symposium on Electromagnetic Compatibility & Signal/Power Integrity (EMCSI. , (2017).
- Johnk, R., Hammerschmidt, C. A., McFarland, M. A., Lemmon, J. A fast-fading mobile channel measurement system. Proceedings of the 2012 IEEE International Symposium on Electromagnetic Compatibility (EMC). , 584-587 (2012).
- Vector signal analysis basics. Keysight Technologies Available from: https://www.keysight.com/us/en/assets/7018-02891/application-notes/5990-7451.pdf?success=true (2020)
- Johnk, R. T., et al. A mobile propagation measurement system. Proceedings of the 2009 IEEE International Symposium on Electromagnetic Compatibility (EMC. , (2009).
- . 3.5 GHz Exclusion zone analysis and methodology. NTIA Technical Report 15-517 Available from: https://www.its.bldrdoc.gov/publications/2805.aspx (2015)
- The national map. United States Geological Survey Available from: https://viewer.nationalmap.gov/basic (2017)
- Radiocommunication Sector of International Telecommunication Union. Propagation by diffraction. Propagation by diffraction. ITU-R Recommendation. , 526 (2019).
- Yoza, N. P. Narrowband 5 GHz mobile channel characterization. Interdisciplinary Telecommunications Program, University of Colorado at Boulder. , (2015).
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеСмотреть дополнительные статьи
This article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены