
Method Article
Visualizing Motion Patterns in Acupuncture Manipulation
In This Article
Summary
Here, we present a protocol for using the Acupuncture Manipulation Education System (AMES) in the training of acupuncture manipulation skills using phantom acupoints.
Abstract
Acupuncture manipulation varies widely among practitioners in clinical settings, and it is difficult to teach novice students how to perform acupuncture manipulation techniques skillfully. The Acupuncture Manipulation Education System (AMES) is an open source software system designed to enhance acupuncture manipulation skills using visual feedback. Using a phantom acupoint and motion sensor, our method for acupuncture manipulation training provides visual feedback regarding the actual movement of the student's acupuncture manipulation in addition to the optimal or intended movement, regardless of whether the manipulation skill is lifting, thrusting, or rotating. Our results show that students could enhance their manipulation skills by training using this method. This video shows the process of manufacturing phantom acupoints and discusses several issues that may require the attention of individuals interested in creating phantom acupoints or operating this system.
Introduction
The Acupuncture Manipulation Education System (AMES) was developed to enhance students' acupuncture manipulation skills, with the goal of teaching acupuncture manipulation through visuo-motor learning. This program is a novel approach to acupuncture training that uses a graphic user interface (GUI) software. This system allows students to concurrently observe their own actual movement and the intended movement. This visual feedback helps students to improve their acupuncture manipulation skills.
Different methods and tools, such as detailed, written instructions or flexible molds for dentistry, have been developed to educate students about medical procedures1-2. In acupuncture, classical medical texts have included instructions on various methods of acupuncture manipulation that have different effects on patients. Recently, several studies proposed a virtual-reality system for acupuncture training using a 3D stereo display and realistic haptic feedback in real time3-4. Whereas many of the past developments focused on the anatomical structures involved in medical procedures5-6, recent developments in acupuncture training have focused on the sensation of needling or a virtual-reality system using artificial skin pads to provide a setting similar to that in which the actual clinical practice of acupuncture needling occurs7-8. As explained in previous studies, the new system provides a display system for visualization of acupuncture manipulation that enables easy handling of the acupuncture needle using inexpensive and portable tools with which to practice needling9. Using a motion sensor designed for acupuncture10, this system helps students and young doctors improve their acupuncture manipulation performance using visual feedback and visuo-motor learning11-12.
Protocol
The procedures presented below were approved by the Institutional Review Board of Korea University, Seoul, Republic of Korea.
1. Constructing Phantom Acupoints
Note: The creation of a phantom acupoint with a similar torque amplitude as that of a human acupoint is important in applying this method because practicing acupuncture manipulation on a phantom acupoint must not feel different in quality from practicing on a human acupoint. Thus, a thorough development and validation process is required to qualify a phantom acupoint as a predefined human acupoint. A 5% agarose gel was shown to have a similar torque amplitude (59.2 ± 4.5 and 58.7 ± 4.6 µNm, respectively) to the LI4 acupoint, which is located between the thumb and index finger13.
- Add 0.75 g agarose to 15 ml distilled water and dissolve the agarose gel; warm the solution in a microwave oven for 20 sec until the agarose becomes transparent. Use a concentration of 5% (0.75 g) to make phantom acupoints with torque amplitudes similar to those of human acupoints (e.g., the LI4 acupoint; Figure 1).
- Divide the agarose gel into 2 ml portions and seal them in five tubes. Make sure to wear gloves to avoid burns. Be careful to position the tubes perpendicularly at room temperature (25 °C) for 2 hr.
- Evaluate the degree of stimulation and biomechanical force of newly created phantom acupoints using an acupuncture needle and motion sensor specifically designed to measure acupuncture manipulation10. Position an acupuncture needle within a hole located at the center of the sensor before starting the evaluation. Evaluate the frequency using power in frequency domain calculated by Fourier transformation.
- Apply acupuncture to the phantom acupoint. When the needle is 15 mm deeper than the gel surface, rotate the needle for 15 sec while rotating one full circle clockwise and counter-clockwise in 1 sec (1 Hz). If possible, verify the velocity of rotation with a motion sensor real-time graph. Pull the needle from the gel after acupuncture manipulation.
2. Implementation of the Acupuncture Manipulation Education System
- Prepare a 5% agarose gel phantom acupoint (process explained in step 1.1) that shows a torque amplitude similar to that of a real human arm, such as acupoint LI4, which is an acupoint located between the thumb and index finger.
- Sanitize hands using an alcohol-based hand sanitizer before acupuncture manipulation to avoid possible wounds or infection while practicing acupuncture manipulation.
- Practice acupuncture using this program. Download this program from the website: http://cmslab.khu.ac.kr/downloads/ames and install the program. Start the program on the computer and prepare the motion sensor. Position an acupuncture needle through the hole located at the center of the sensor before starting the evaluation. Because the acupuncture needle is not attached to the sensor, be prepared to move the needle through the hole while the sensor measures the motion of the needle. Prepare the phantom acupoint to insert and manipulate the needle.
- Choose from various templates of acupuncture manipulation, including various frequencies and asymmetric movements. Before starting the manipulation, choose from lifting/thrusting or the rotating manipulation technique by pressing one of the two radio buttons displayed on the graphic user interface (GUI) software and decide whether the intended movement for practice follows the pattern of a 1:1 ratio, a 1:2 ratio, or a 2:1 ratio sine graph.
- Position the acupuncture needle (0.25 × 40 mm) in the motion sensor so that it is ready to be manipulated. Place the phantom acupoint under the needle and the sensor.
- Calibrate the motion sensor using a two-axis actuator. Position the acupuncture needle with the participant's finger and press Calibrate on the screen. Through the calibration, the two-axis actuator will recognize and adjust the current position as a zero value in depth.
- Manipulate an acupuncture needle on the phantom acupoint for about 1 min while the actual movement of acupuncture manipulation is being measured. Have the participant look at the screen as they manipulate the needle to view the actual movement of his or her acupuncture manipulation concurrently, along with the intended movement. Transmitted actual movement is displayed as the green line, and the template of the intended motion is concurrently overlapped as the red line.
- Acquire real-time motion wave data (80.3 Hz sampling rate) of the lifting/thrusting method of acupuncture manipulation using the motion sensor by clicking the button presented in the software. The real-time motion wave data can also be acquired using the rotation method.
- Repeat this at least eight times to enhance acupuncture manipulation skills.
3. Data Processing
- Filter out the fluctuating low-frequency signals (< 0.2 Hz) and high-frequency noise signals (> 5 Hz) by applying the infinite impulse response (IIR). Use the Butterworth filter, which allows for filtering of information in a frequency signal that is either lower than 0.2 Hz or higher than 5 Hz.
- Separate the filtered signals of the participants into repeated motion units by detecting local maximum and minimum points.
- To generate a pattern template for each participant, normalize the duration (length of sampled motion unit) and amplitude (magnitude of lifting/thrusting or rotation) in every sampled unit.
- Calculate the average amplitude and duration of a sampled motion unit for each participant.
- Extract the main frequency from the actual movement using a Fourier transformation, so that the error between the main frequency and frequency of the intended movement is shown on the program screen after the participant finishes a 1-minute training session.
- Analyze the normalized motion units for each participant using a generalized additive mixed model (GAMM) method9.
Note: In GAMM, model a single manipulation movement (M) for a participant as the sum of smooth function in time (t) and random intercepts for individual units (u). In other words, model M = s(t) + b(u), where M is the motion for a participant, s(t) is a smooth function in time, and b(u) is random intercepts for individual units. Our previous study explained the GAMM model and the calculation of the mean square error (MSE) in detail9. - Calculate the mean square error (MSE) between the intended movement and the extracted motion pattern of the actual movement by the participant between the first and the last trial of acupuncture manipulation9.
- Analyze data from the first and the last trial using a two-sample t-test to identify changes in acupuncture manipulation after visual feedback.
Results
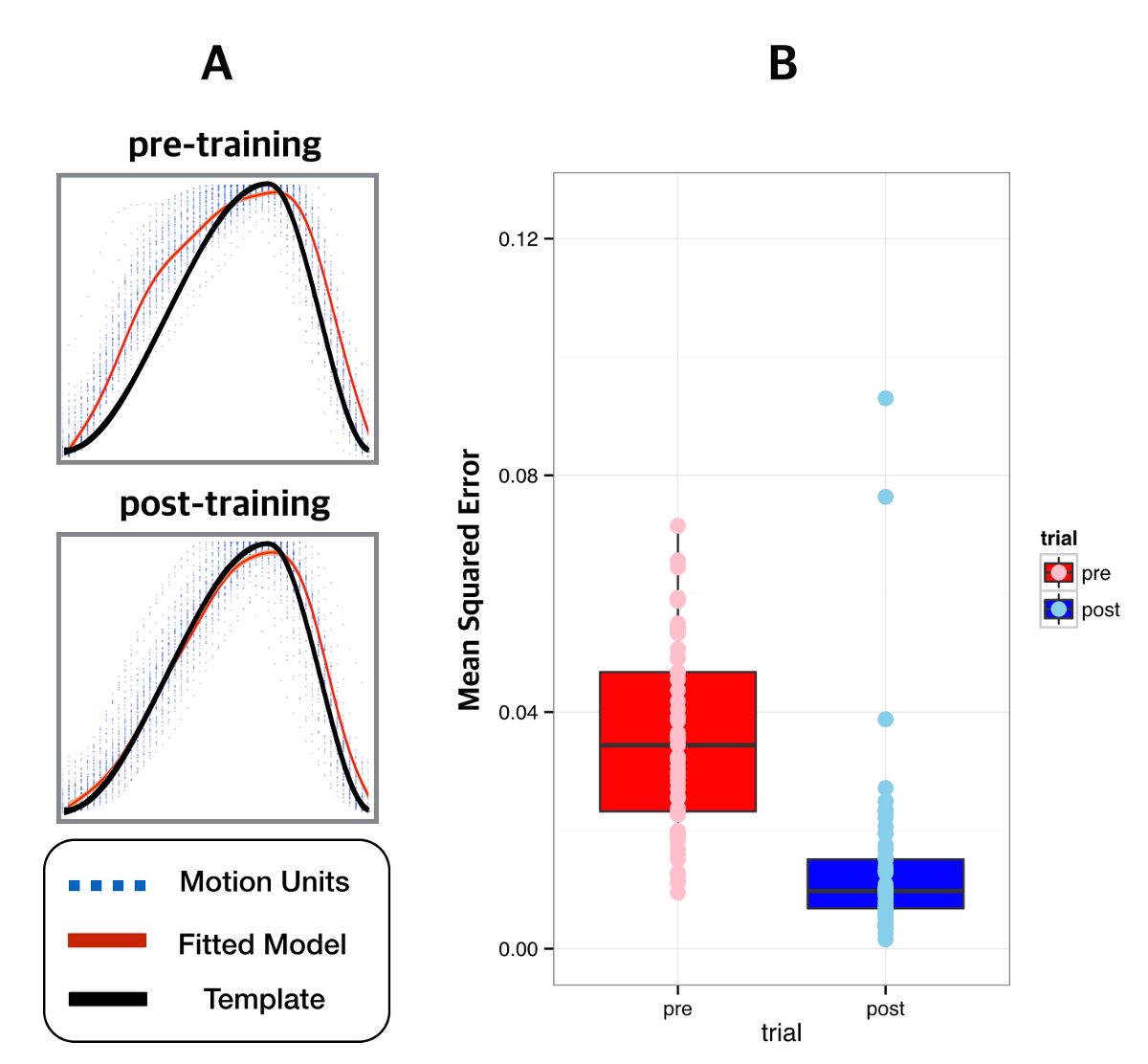
The Acupuncture Manipulation Education System (AMES) is an educational system that visualizes the rotating manipulation or lifting/thrusting method of acupuncture treatment. Here, we show an example of waveform raw data of motion and torque amplitude during a 1-Hz rotating manipulation (Figure 1). As shown in Figure 2A, the program concurrently visualizes the actual movement and the intended movement using different color lines, allowing for a visuo-motor learning. In addition, there are various templates for rotating and lifting/thrusting movements according to the symmetry and frequency of different movements (Figure 2B). After the participants complete the acupuncture manipulation, the raw data of the real-time motion are processed to produce an extracted sample motion of each participant's actual acupuncture manipulation. The sampled motion is used to calculate the error between the intended movement and the actual movement after processing (Figure 3). Upon analysis, the motion patterns of acupuncture manipulation during the complex lifting/thrusting session are improved. The estimated motion pattern regression curves are closer to the motion template in the post-training test compared with the pre-training test (Figure 4A). In addition, there is a significant shape error reduction in the complex lifting/thrusting session following training (Figure 4B).

Figure 1. Examples of Waveform Raw Data of Motion Amplitude and Torque during a 1 Hz Rotating Manipulation (Left: Human Acupoint, Right: Phantom Acupoint). A concentration of 5% (0.75 g) agarose was used to create phantom acupoints with torque amplitudes similar to those of human acupoints (e.g., the LI4 acupoint). Please click here to view a larger version of this figure.
{kind=link}

Figure 2. Overview of the Program. A) A screenshot of the program. Transmitted actual movement from the motion sensor is displayed as the green line, and the template of the intended motion is concurrently overlapped, appearing as the red line. B) Various templates of acupuncture manipulation movement. This educational program for acupuncture supports training for both the rotating and the lifting/thrusting movements of the acupuncture needle. Various templates are provided to learn various frequencies and asymmetric movements. Please click here to view a larger version of this figure.
{kind=link}

Figure 3. Extraction of the Sample Motion of the Participant through Data Processing and Error Calculations. (a) Raw motion data in a trial, (b) identified sampled motion unit, (c) normalization with resampled of the number of observed data to a specific number (50), (d) normalization with rescaling of the lifting/thrusting amplitude between 0 and 1, and (e) calculating mean squared error between individual motion and template shape. Please click here to view a larger version of this figure.
{kind=link}

Figure 4. Data Analysis Before and After the Training. A) Comparison of motion patterns between pre-training and post-training trials. Eight training trials were performed between the pre- and post-training. Single motion units (blue dotted line), the fitted model (red line) through a generalized additive mixed model (GAMM), and the template of the intended motion (black line) pre- and post-training are displayed. B) Box and whisker plot of MSE values. The mean square error (MSE) was compared between the pre-training and the post-training trial. It can be seen that this participant showed a significantly lower MSE value in the post-training trial than in the pre-training trial after using this program. Please click here to view a larger version of this figure.
{kind=link}
Discussion
The present procedure tracks the process of acupuncture manipulation education from the creation of phantom acupoints and the application of the AMES program to the analysis of data acquired from participants' trials. Phantom acupoints are generated from agarose gel, and the solution needs to be carefully adjusted to resemble the motion and torque amplitudes of human acupoints. We developed different types of phantom acupoints with torque amplitudes that were similar to those of other acupoints; these can be applied to a more comprehensive acupuncture manipulation training protocol, such as one using acupoints with different anatomical characteristics13. In addition, use of a motion sensor allows the quantification of needle manipulation in terms of motion and force patterns10. Using phantom acupoints and acupuncture needles, this program can be applied to training different types of acupuncture manipulation by changing its modes from the rotating or lifting/thrusting method and by changing the frequency and the pattern. In addition, by extracting the sample motion of the participant through data processing, the participant can see their acupuncture manipulation movement and instantly compare the difference between the actual and intended movements. Furthermore, GAMM, based on the generalized additive model (GAM) method, allows for the specification of smooth functions within a mixed model framework. By comparing the motion patterns before and after training, the participants can receive information about improvements in acupuncture manipulation as a result of training.
There are different methods and tools for educating and regulating medical procedures. One is a detailed, written instruction set, such as a standard operating procedure (SOP). The goal of this approach is to achieve uniformity in the performance of a specific function to meet the goals of Good Clinical Practices1. Another approach, similar to our phantom acupoint method, is found in dental models, which include flexible molds2. A previous study used force feedback for training with an epidural injection simulator to obtain cerebrospinal fluid14. A phantom acupoint is useful in a phantom-based educational program that trains students to perform acupuncture manipulations. This is an important advance in educational programs related to medical procedures, including acupuncture. On the other hand, due to the lack of quantitative and objective information concerning needle manipulation motion parameters, it is difficult to learn the sophisticated movements of acupuncture manipulation. To solve this problem, Davis et al. developed a motion and force sensor to quantify different needling motion and force patterns for two different acupuncture techniques10.
Sensorimotor learning is based on sensory feedback, which seeks to reduce discrepancies between desired and actual movements. Humans can estimate the error gradients of each component of their movement and improve their performance through iterative corrections based on movement error. Visual feedback during an isometric target-acquisition task was shown to improve performance in two different ways: concurrent visual feedback enhanced motor performance through automatic recalibration of visuo-motor mapping, whereas post-trial visual feedback induced improvements using a cognitive strategy. AMES presents acupuncture manipulation in the form of an oscillation that constantly moves according to the participant's movement, allowing the participant to obtain feedback and modify his or her manipulation technique.
The critical step in this protocol is to adjust the position of acupuncture needle so it is neither too deep nor too shallow within the phantom acupoint so that the program will recognize the position of the needle as the baseline and show movement on the same level as the template on the screen. The participant must check the screen and the position of the acupoint carefully before starting the manipulation movement.
By modulating the frequency, amplitude, and ratio of the sine wave, the visualizations of the intended movement and the actual movement of the acupuncture manipulation provide feedback to the participant. This real-time feedback to the participant allows minimization of manipulation error. The visualization in this program allows depiction of changes in the time interval or in the velocity of the rotation and lifting/thrusting movement of acupuncture manipulation, as well as in the pattern of the movement. For example, the mode of lifting/thrusting can be in the ratio of 1:1, 2:1, or 1:2, and the mode of rotating clockwise/counterclockwise can be at 0.5, 1, or 2 Hz. To enhance the effect of real-time visual feedback and enable students to grasp the movement error, this program provides information on the difference between the intended and actual movements enacted by the participant after the trial using the error feedback based on a quantified measurement12.
Standardization of acupuncture education is difficult due to the complicated manipulations of acupuncture needles involved in this practice. Different forms of movement are required to visualize different methods of acupuncture, such as the tonifying and reducing methods in the lifting/thrusting movement. Recent studies have focused on display systems for enhancing visualization of body structures during medical procedures as well as on simulations of the tools and methods used in medical procedures, such as phantom models10-11. By visually presenting the motion patterns of the hand movements performed during acupuncture manipulation, this system helps students and young doctors improve their performance of the sophisticated hand movements required for acupuncture needle manipulation. Therefore, our program proposes a novel form of acupuncture training that can yield standardized acupuncture practice with easy and efficient preparation. In addition, this program provides ample data on the acupuncture needling performed by participants, which can be used to provide visuo-motor learning in acupuncture education.
The limitations of the technique presented here are as follows. First, the template curve for manipulation is artificially generated, which means that it can differ from the manipulation movement in an actual setting. Second, the information about the rotation methods provided by oscillation is not intuitively obvious, as the direction of clockwise and counter-clockwise movement is not well-represented in the visualization. Finally, our protocol does not include programs that provide training in the combination skills of rotating and lifting/thrusting together, which is another acupuncture manipulation skill. In our future study, we will provide templates from skilled clinicians that include the combination skills of rotating and lifting/thrusting to overcome some of these limitations.
In summary, our newly developed program for acupuncture training uses visual feedback and provides a new method for acupuncture education, employing a device that enables easy handling of acupuncture needles and precise measurement of acupuncture movement. It is also a cost-effective tool with which to practice acupuncture needling. Moving beyond a visualization system of body parts during medical procedures, this program uses graphs to provide a visualization of the medical procedure itself. Our program proposes a novel method for acupuncture training that is simple and efficient and results in standardized practices and data on acupuncture needling.
Disclosures
The authors declared that no competing conflicts of interest exist.
Acknowledgements
This research was supported by the National Research Foundation of Korea (NRF-2015M3A9E3052338).
Materials
| Name | Company | Catalog Number | Comments |
| Agarose | Lonza | 50002 | |
| Safe-Lock Tube | Eppendorf | T2795-1000EA | |
| motion and force sensor | Stromatec | Acusensor | www.stromatec.com |
| acupuncture needle | Seirin | J Type Japanese needle |
References
- Thompson, C., et al. Effects of a clinical-practice guideline and practice-based education on detection and outcome of depression in primary care: Hampshire Depression Project randomised controlled trial. Lancet. 355 (9199), 185-191 (2000).
- Dental teaching model. U.S. Patent No. , 5,120,229 (1992).
- Heng, P. A., et al. Intelligent inferencing and haptic simulation for Chinese acupuncture learning and training. IEEE Trans Inf Technol Biomed. 10, 28-41 (2006).
- Leung, K. M., Heng, P. A., Sun, H., Wong, T. T. A haptic needle manipulation simulator for Chinese acupuncture. Stud Health Technol Inform. 94, 187-189 (2003).
- Wang, H. S., Yan, Z. G., Cheng, Z., Shao, S. J., Zhuang, T. G. Study on force feedback of acupuncture manipulation at Jianliao (TE 14) based on VOXEL-MAN. Zhongguo Zhen Jiu. 29, 745-748 (2009).
- Li, J., Grierson, L. E., Wu, M. X., Breuer, R., Carnahan, H. Perceptual motor features of expert acupuncture lifting-thrusting skills. Acupunct Med. 31, 172-177 (2013).
- Display system for enhancing visualization of body structures during medical procedures. U.S. Patent. , 5,526,812 (1996).
- Method for carrying out a medical procedure using a three-dimensional tracking and imaging system. U.S. Patent. , 5,797,849 (1998).
- Seo, Y. J., et al. Motion patterns in acupuncture manipulation. Acupunct Med. 32 (5), 394-399 (2014).
- Davis, R. T., Churchill, D. L., Badger, G. J., Dunn, J., Langevin, H. M. A new method for quantifying the needling component of acupuncture treatments. Acupunct Med. 30 (2), 113-119 (2012).
- Lee, I. S., Lee, Y. S., Park, H. J., Lee, H., Chae, Y. Evaluation of phantom-based education system for acupuncture manipulation. PLoS One. 10 (2), e0117992(2015).
- Jung, W. M., et al. Sensorimotor learning of acupuncture needle manipulation using visual feedback. PLoS One. 10 (9), e0139340(2015).
- Lee, I. S., et al. Haptic Simulation for Acupuncture Needle Manipulation. J Altern Complement Med. 20 (8), 654-660 (2014).
- Dang, T., Annaswamy, T. M., Srinivasan, M. A. Development and evaluation of an epidural injection simulator with force feedback for medical training. Stud Health Technol Inform. 81, 97-102 (2001).
Reprints and Permissions
Request permission to reuse the text or figures of this JoVE article
Request PermissionThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. All rights reserved