
Method Article
Güdümlü bitki büyümesi için robotik algılama ve stimuli hükmü
Bu Makalede
Özet
Dağıtılmış robot düğümleri, tırmanma bitkilerin büyüme yörüngeleri yönlendirmek için mavi ışık uyaranlara dizileri sağlar. Robotların doğal fototropizm aktive ederek, ikili sol-sağ kararlar ile bitkiler rehberlik, önceden tanımlanmış desenler içine onları büyüyen aksine robotlar uykuda olduğunda mümkün değildir.
Özet
Robot sistemleri, genellikle hasat, sulama ve mekanik ot kontrolü gibi Tarımsal Otomasyon faaliyetleriyle sınırlı doğal bitkilerin manipülasyon için aktif olarak araştırılmaktadır. Bu araştırma genişletme, biz burada bir yeni metodoloji tanıtma ve hormon dağılımı için doğal mekanizmalar aracılığıyla bitkilerin yönlü büyüme işlemek için. Robotik uyaranlara yönelik etkili bir metodoloji, bitkilerin daha sonra gelişimsel aşamaları ile yeni deneyler için veya yeşil duvarlar için bitkiler şekillendirme gibi yeni biyoteknoloji uygulamaları için olanaklar açabilir. Bitkiler ile etkileşim, küçük ve değişken bitki organlarının kısa menzilli algılama ve sağlanan uyaranlara ek olarak çevre tarafından etkilenen bitki yanıtlarının kontrollü çalıştırması da dahil olmak üzere çeşitli robotik zorluklar sunar. Bitki büyümesini yönlendirmek için, biz artan ipuçları yakınlığı algılamak için sensörler ile bir grup Mobil robotlar geliştirmek, ve diyotlar ile fototropism harekete ışık uyaranlara sağlamak için. Robotlar tırmanma ortak fasulye ile test edilmiştir, Phaseolus vulgaris, kontrol edilmiş bir ortamda beş hafta kadar süreleri olan deneyler. Robotlarla ardışık olarak mavi ışık zirvesinde emisyon dalga boyu 465 nm-bitki büyüme başarıyla hedef pozisyonlara ulaşmak için mekanik destekler boyunca ardışık ikili kararlar ile yönlendirdim. Büyüme desenleri, yaklaşık yedi haftalık bir süre içinde toplam uzunluğu 250 cm 'ye kadar yetiştirilen bitki ile yükseklik 180 cm kadar bir kurulum test edilir. Robotlar kendilerini koordine ve tamamen özerk çalışır. Onlar kızılötesi yakınlık sensörleri tarafından yaklaşan bitki ipuçları algılayabilir ve mavi ışık uyaranlara ve uyku durumu arasında geçiş yapmak için radyo ile iletişim, gerektiği gibi. Genel olarak, elde edilen sonuçlar, doğal ve mühendislik otonom sistemler arasında potansiyel olarak karmaşık etkileşimlerin çalışması için, robot ve bitki deney metodolojilerini birleştirerek etkinliğini destekler.
Giriş
Üretim ve üretimde otomasyonun artan prevalansı ile uyumlu olan robotlar,1,2,3,4,5, ekmek, tedavi ve hasat tesislerinde kullanılmaktadır. Tesis deneylerini non-invazif bir şekilde otomatikleştirmek için robot teknolojisini kullanıyoruz, uyaranlara yönlü tepkiler yoluyla büyüme ile direksiyon amacı ile. Geleneksel bahçe uygulamaları mekanik kısıtlama ve kesme ile ağaçlar ve çalılar manuel şekillendirme dahil ettik. Büyüme desenlerini uyaranlarla yönlendirerek, örneğin bu şekillendirme görevine uygulanabilir bir metodoloji sunuyoruz. Bizim sunulan metodolojisi de otomatik bitki deneylerine doğru bir adımdır, burada ışık uyaranlara sağlamak için belirli bir odak ile. Teknoloji sağlam ve güvenilir hale gelmeden önce, bu yaklaşım, bitki deneylerinde maliyetleri azaltmak ve zaman ve manuel işçilik nedeniyle Aksi takdirde olanaksız olacak yeni otomatik deneyler için izin potansiyeli vardır. Robotik unsurlar serbestçe programlanabilir ve sensörler, uyaranlar için aktüatörler ve mikroişlemciler ile donatılmıştır gibi otonit hareket. Biz burada yakınlık algılama (yani, yakın menzilli mesafeler ölçme) ve ışık uyaranlara odaklanmak, diğer birçok seçenek mümkündür. Örneğin, sensörler bitki rengini analiz etmek, biyokimyasal aktivite6izlemek için veya bitki elektrofizyolojisi8ile örnek çevre koşullarını izlemek için phytosensing7 yaklaşımlar için kullanılabilir. Benzer şekilde, aktüatör seçenekleri, titreşim motorları, püskürtme cihazları, ısıtıcılar, fanlar, gölgelendirme cihazları veya yönlendirilmiş fiziksel temas için manipülatörler aracılığıyla diğer uyaranlara9tür sağlayabilir. Robotlara (örneğin, ' yavaş botlar '10) yavaş hareketlilik sağlamak için ek Aktüasyon stratejileri uygulanabilir, böylece onlar uyaran sağlayan pozisyon ve yönünü kademeli olarak değiştirebilir. Ayrıca, robotlar tek tahta bilgisayarlar ile donatılmış olarak, onlar gibi daha sofistike süreçler çalışabilir bitki phenoyping için vizyon11 veya yapay sinir ağ denetleyicileri uyaran Aktüasyon için12. Bitki bilimi araştırma odağı genellikle erken büyüme üzerinde olduğu gibi (yani, çekimde)13, daha uzun dönemler üzerinde bitkiler etkilemek için otonom robot sistemleri kullanarak tüm etki alanı incelenmiş görünüyor ve birçok gelecekteki fırsatlar sunabilir. Hatta bir adım daha ileri, robotik unsurları araştırma nesneleri olarak görülebilir, Bio-hibrid sistemlerin karmaşık dinamikleri çalışma robotlar ve bitkiler yakından etkileşim tarafından oluşturulan çalışmaya izin. Robotlar seçici olarak bitkiler üzerinde uyaran empoze, bitkiler kendi adaptif davranışlarına göre tepki ve daha sonra onların sensörler aracılığıyla robotlar tarafından tespit edilir büyüme deseni, değiştirin. Yaklaşımımız bitkiler ve robotlar arasındaki davranışsal geribildirim döngüsünü kapatır ve homeostatik bir kontrol döngüsü oluşturur.
Bizim deneyler robot sisteminin fonksiyonunu test etmek için, biz sadece tırmanma ortak fasulye kullanın, Phaseolus vulgaris. Bu kurulumda, biz bitkiler thigmotropism etkilenir ve seçim için büyüme yönleri sınırlı bir dizi var gibi, genel yüksekliği 180 cm bir gridded iskele mekanik desteği ile, tırmanma bitkiler kullanın. Biz haftalarca bir süre boyunca tüm bitki şekillendirmek istiyorum göz önüne alındığında, biz genç çekmeleri ve daha sonra kök sertleştirme dahil olmak üzere farklı büyüme dönemleri üzerinde, makroskopik olarak bitkinin phototropism etkilemek için mavi ışık uyaranlara kullanın. Biz sadece kırmızı ışık sağlamak mavi ışık uyaranlara dışında tam kontrollü ortam ışık koşullarında deneyler yürütmek, tepe salınımı ile dalga boyu 650 nm. Onlar mekanik destek ızgarasında bir çatallanma ulaştığınızda, onlar sol veya sağ büyümek olup olmadığını ikili bir karar yapmak. Robotlar bu mekanik bifurcasyonlar, 40 cm mesafeleri ile ayrılmış konumlandırılmış. Onlar otonit etkinleştirmek ve mavi ışık emittance devre dışı, tepe emisyonu ile dalga boyu 465 Nm, istenilen büyüme deseni önceden tanımlanmış bir harita göre (Bu durumda, bir Zigzag desen). Bu şekilde, bitkiler tanımlanmış bir sırada bifurkasyon bifurakten yönlendirilir. Yalnızca bir robot, belirli bir zamanda aktive edilir, bunun sırasında mavi ışığı yayar ve bunun altındaki mekanik destekte bitki büyümesini otonotik olarak izliyoruz. Bir kez onun kızılötesi yakınlık sensörleri kullanarak büyüyen bir ipucu algılar, mavi ışık yayan durur ve radyo üzerinden komşu robotlar için iletişim kurar. Sırayla sonraki hedef olarak kendisini belirleyen robot daha sonra aktive, yeni bir mekanik Bifurcation doğru bitki büyüme çekiyor.
Yaklaşımımız hem mühendislik hem de doğal mekanizmalara sahip olduğu için, deneylerimiz aynı anda ve karşılıklı olarak çalışan çeşitli yöntemler içerir. Buradaki protokol ilk olarak, her biri Birleşik bir deneme kurulumuna entegre edilmesi gereken yöntemin türüne göre düzenlenir. Bu türler bitki türleri seçkisi; donanım ve mekaniği içeren robot tasarımı; iletişim ve kontrol için robot yazılımı; ve bitki sağlığını izleme ve bakım. Protokol daha sonra veri toplama ve kayıt tarafından izlenen deneme tasarımı ile devam eder. Şimdiye kadar elde edilen sonuçların tam detayları için, bkz: Wahby ve al.14. Temsili sonuçlar üç tür deney kapsar — tüm robotların uyaranlara sahip olmadığı (yani, Uyuyan) deneyler kontrol eder; tek karar deneyler bitki bir uyaranlara arasında ikili seçim yapar-robot sağlayan ve uyuyan bir; ve birden çok karar denemeleri nerede bitki önceden tanımlanmış bir desen büyümek için ikili seçimler dizisi gider.
Protokol
1. bitki türleri seçim prosedürü
Not: Bu protokol, tırmanma ile ilgili bitki davranışları, ışığa yönlü tepkiler ve belirli sezonda bitkilerin sağlık ve hayatta kalma, konum ve deneysel koşullarda odaklanır.
- Büyüyen ipuçlarında güçlü pozitif phototropism15,16 UV-a ve mavi ışık (340 – 500 Nm) doğru görüntülemek için bilinen bir bitki türü seçin.
- Bir sarıcı olan bir tür seçin, hangi circumnutation17 davranış telaffuz edilir ve büyüyen ucu belirli deneysel koşullarda kullanılan mekanik destekler etrafında rüzgar için yeterince büyük genlik ile sarmal yörüngeleri vardır. Seçilen sarıcı tarafından sergilenen Twining18 davranışı, deneyde mevcut olan çevre ve besin koşullarını tolere etmeli ve 45 ° ' ye kadar eğim açısı ile mekanik desteği tolere etmelidir.
- Deneysel koşullarda güvenilir ve hızlı bir şekilde büyüyecek bir tür seçin, ortalama büyüme hızı günde yaklaşık 5 cm 'den az değil ve mümkünse tercihen daha hızlı.
- Mevcut sezonda ve coğrafi konumda gerekli davranışları görüntüleyen bir tür seçin.
- Tür deneysel kurulum mevcut olacak çevresel parametreler aralığı tolere emin olun. Bitki yeşil ışık yokluğunda ve görünür spektrumunun dışında ışık olmaması (400 – 700 nm) tolere etmelidir. Tesis ayrıca, yaklaşık 27 °C ' de tutulan ve nem ve sulamada mevcut olan dalgalanmaların yanı sıra, sıcaklık üzerindeki mevcut dalgalanmaları da tolere etmelidir.
2. robot koşulları ve tasarım
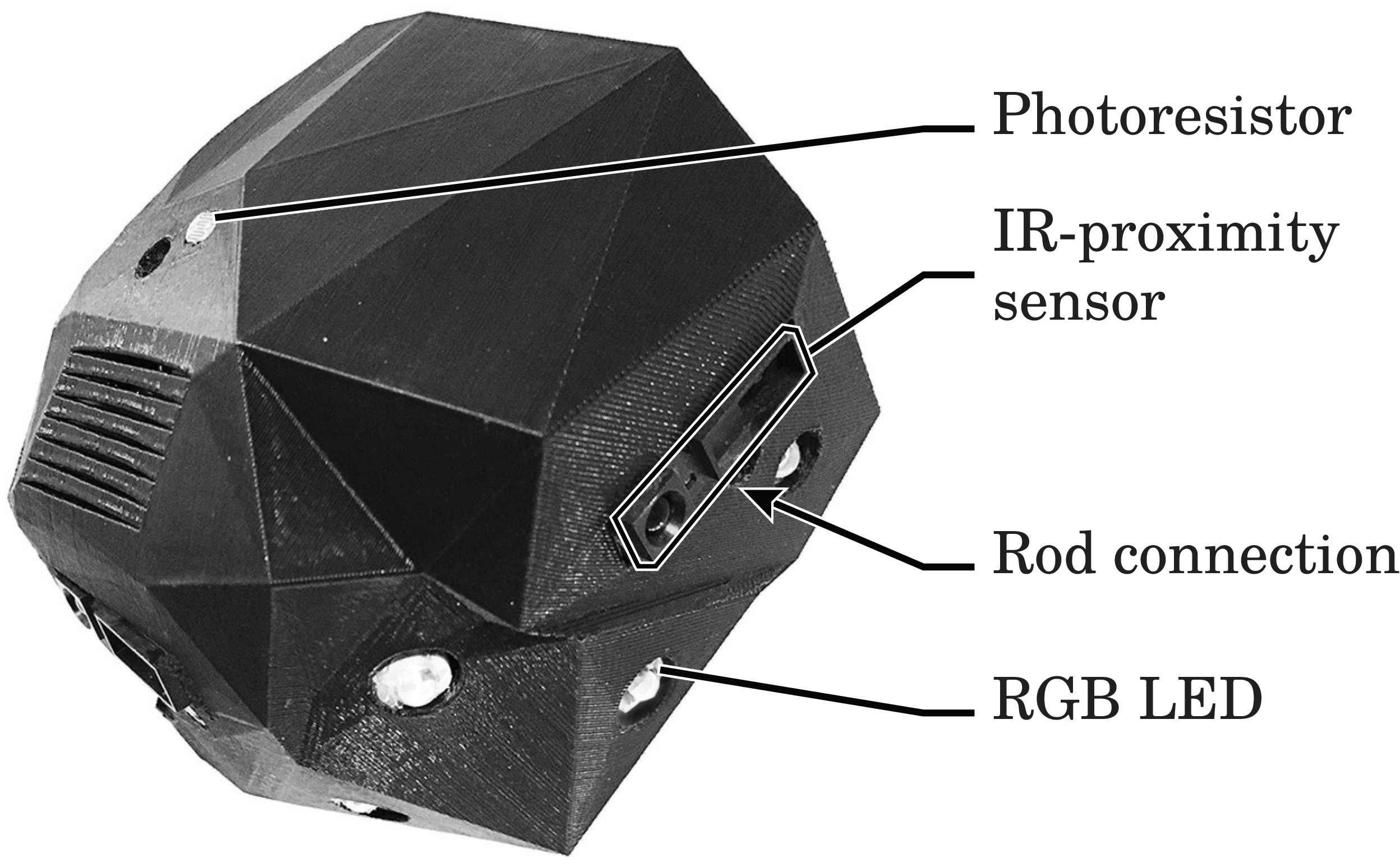
- Robot yeteneklerini tek tahta bilgisayarlarla merkezi olmayan düğümlere düzenleyin (bkz. Şekil 1 ve Şekil 2), modüler mekanik desteklere entegre. Her özdeş robot düğümü kontrol etmek ve kendi davranışını yürütmek mümkün olduğundan emin olun.
- Bitkiler için uyarıcı robotik sağlanması için, kontrollü aralıklarla bitkiler için mavi ışık (400 – 500 Nm) sağlamak, onların fototropik tepkisi tetikleyecek bir yoğunlukta, yönde ve oryantasyon deneme ilgili kısmı için gerekli .
- Kırmızı-yeşil-mavi (RGB) ışık yayan diyot (LED) veya yalıtılmış mavi LED seçin. Her iki durumda da, tepe emisyon ƛMax = 465 NM ile mavi diyot Ile bir LED içerir.
- Gruplar halinde eşlik eden ve kullanılan robotun kesin koşullarında belirlenen bir LED 'i seçin, deneme kurulumunda test edilen her yönde gerekli ışık yoğunluğu seviyesini koruyabilirsiniz. Test edilen her yön için, tek bir robottaki LED 'Lerin mavi diyotları, kullanılan robot muhafazasında ve kullanılan herhangi bir yerde yer alan zaman aşırı ısınmadan yaklaşık 30 lümen bir ışık yoğunluğu seviyesini sürdürmenin topluca yeteneğine sahip olduğundan emin olun ısı dağılımı stratejileri. Seçilen LED 'in yaklaşık 120 ° ' lik bir görüntüleme açısı olması gerekir.
Not: Örneğin, bir robot yönü başına üç LED kullanan, yoğunluğu mikrodenetleyici özellikli düzenleme ile, mavi diyotlar maksimum ışık yoğunluğu Φ ile yayıyorsa = 15 lümen, daha sonra aşırı ısınmadan% 65 korumak mümkün olmalıdır maksimum.) - Gerekli parlaklığa göre güç kaynağını düzenleyen LED sürücülerle robotun tek tahta bilgisayarına LED 'Leri arayüz. Kurulumunda test edilen her yönde hizmet veren her bir LED ya da LED grubundan bireysel denetimi etkinleştirin.
- Bitki büyüyen ipuçları yakınlığı için algılama prosedürü için (bkz: Şekil 3B), kızılötesi YAKıNLıK (IR-Proximity) sensörler işlenmiş okumalar güvenilir ve otonik her yöne yaklaşan bitkilerin varlığını algılamak için test .
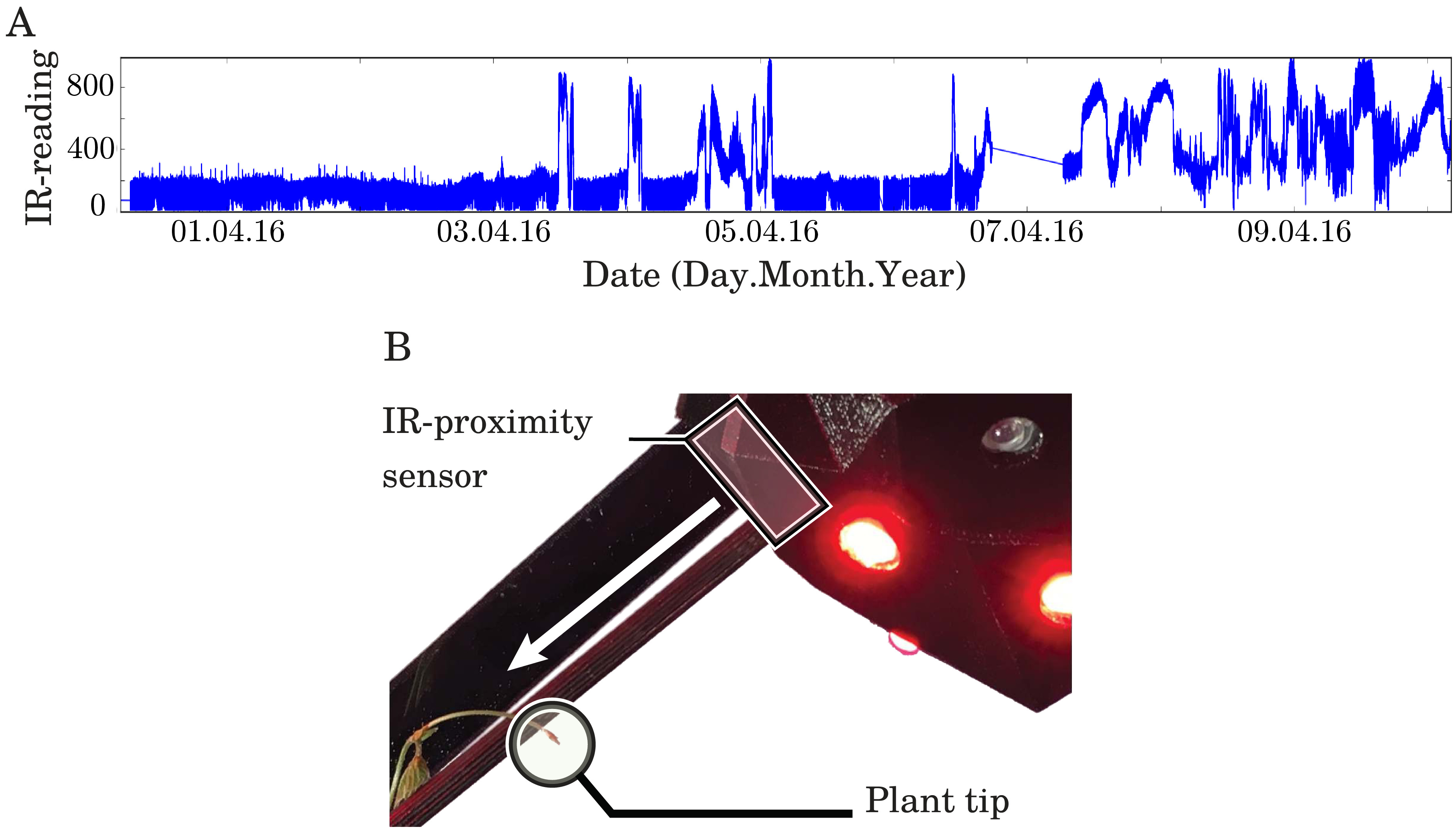
- Kesintisiz bir ortamda test edildiği gibi, bitkinin yaklaştığı istikametin merkezi eksenine dik şekilde düzenlenmiş olarak, seçilen bitki türlerinin büyüyen ucunu düzenli olarak algılayan bir IR yakınlık sensörü seçin. Şekil 3A 'da, yatay eksendeki ' 07.04.16 ' etiketli zaman damgasına başlayarak, 5 cm uzaklıktan başlayarak başarılı algılama gerçekleşmesini sağlayın.
- Her IR-Proximity sensörü robotun tek tahta bilgisayarına arayüze yerleştirin ve sensör okumalarını bir bitkinin 5 cm içinde olup olmadığına karar vermek için ağırlıklı bir aritmetik ortalama yaklaşım uygulayın. en son gelen sensör okumaları kullanın Beş s algılama kullanılan nihai ortalama ağırlığı% 20 vermek.
- Seçili IR yakınlık sensörünün, seçilen türlerin ışık odaklı davranışlarını etkileyebilir kritik dalga boylarını yaymadığından emin olun. Sensör tarafından 800 Nm 'nin altında yayılan dalga boyların Spektrometre ile ölçülen sensörün IR kaynağından 5 mm 'den büyük mesafelerde bulunmadığından emin olun.
- Her robotun kendi yerel alanında devam eden bölümleri Otonas bir şekilde yönetebilmesi için deneme işlevlerini robotlar kümesi üzerinden dağıtın. Test edilen ilgili bitki büyüme yönlerine göre robotlar ışık uyaranlara ve algılama yetenekleri sağlanması düzenleyin.
- Her robotun kablosuz yerel alan ağı (WLAN) etkinleştirilmiş tek tahta bilgisayar etrafında oluşturun. Bilgisayarı özel bir baskılı devre kartı (PCB) aracılığıyla sensörler ve aktüatörlere arabirim. Kendi pil yedekleme ile her robotun tek başına güç.
- Yukarıdaki gereksinimlere göre, yaklaşan bitkiler için test edilen yön başına bir IR-Proximity Sensör ekleyin.
- Yaklaşan bitkiler için test edilen yön başına, yukarıdaki mavi ışık gereksinimlerini sunmak için yeterli LED içerir.
- Mavi LED 'Ler yerine RGB LED 'Ler kullanıldığında, mavi diyot kullanımda olmadığında isteğe bağlı olarak kırmızı diyot üzerinden emite izin verilir (fotosentez desteği ile bitki sağlığı için) aşağıda açıklanan kırmızı ışık teslimatını artırırlar.
- Eğer kırmızı ışık robotlardan belirli aralıklarla yayıldığı takdirde, yaklaşık ƛMax = 625 – 650 nm 'lik kırmızı diyotlar kullanarak yeşil bandın (örneğin 550 nm 'nin altında) veya uzak kırmızı bandın (yani 700 nm 'nin üstünde) çakışan hiçbir kritik dalga boyu yoktur.
- Kırmızı diyotlar mavi diyotlar daha yüksek ısı seviyeleri üretmek için izin vermez.
- Robotlar arasında yerel ipuçları sağlayan donanımı içerir. Işık emitör durumunu izlemek için komşu bir robotun her yönü için bir photoresistor (yani, ışığa bağlı direnç veya LDR) içerir. Alternatif olarak, WLAN üzerinden yerel komşuların durumunu iletişim.
- Seçilen mavi diyotlar ve kullanılan robot muhafaza koşullarında gerektirdiği gibi, ısı dağıtmak için donanım içerir. Alüminyum soğutucu kombinasyonu ile yürütmek, robotun kasa muhafazasında delikleri, ve fanlar. Fanlar tek tahta bilgisayar veya ek PCB üzerinde bir dijital sıcaklık sensörü tarafından etkinleştirin.
- Robot bileşenlerini, ilgili yönlerin eşit şekilde hizmet veren şekilde organize edin.
- Hangi bitkilerin yaklaşım olabilir yönlerinin her biri için eşdeğer bir ışık yoğunluğu dağıtmak için mavi diyotlar konumlandırın (yani, robotun alt yarısında bağlı mekanik desteklerden, bkz: adım 2,5). Her diyot robot durumda, objektif açısının Merkez ekseni 60 ° içinde mekanik destek her ekseni içinde olduğu gibi Orient ve onu robot kılıfı tarafından engellenmez konumlandırın.
- IR-Proximity sensörlerini kendi yaklaşan büyüme yönlerine eşdeğer olarak konumlandırın (yani, robotun alt yarısına bağlı mekanik desteklerden, bkz. Adım 2,5). Her bir IR-Proximity sensörü, robotla servis edilen mekanik destek arasındaki ek noktanın 1 cm içinde konumlandırın ve görüntüleme açısını destek eksenine paralel şekilde yönlendirmek. Verici ve alıcısının robot kılıfı tarafından engellenmediğinden emin olun.
- Her yön için yerel iletişim için herhangi bir Fotodirençler konumlandırın (yani, robota bağlı tüm mekanik destekler, bkz. 2,5) kurulumunda bir komşu robot karşı karşıyayız. Her photoresistor, görüntüleme açısının Merkez ekseni 45 ° içinde destek ekseni içinde olduğu gibi yönlendirmek ve pozisyon robot kılıfı tarafından engellenmez.
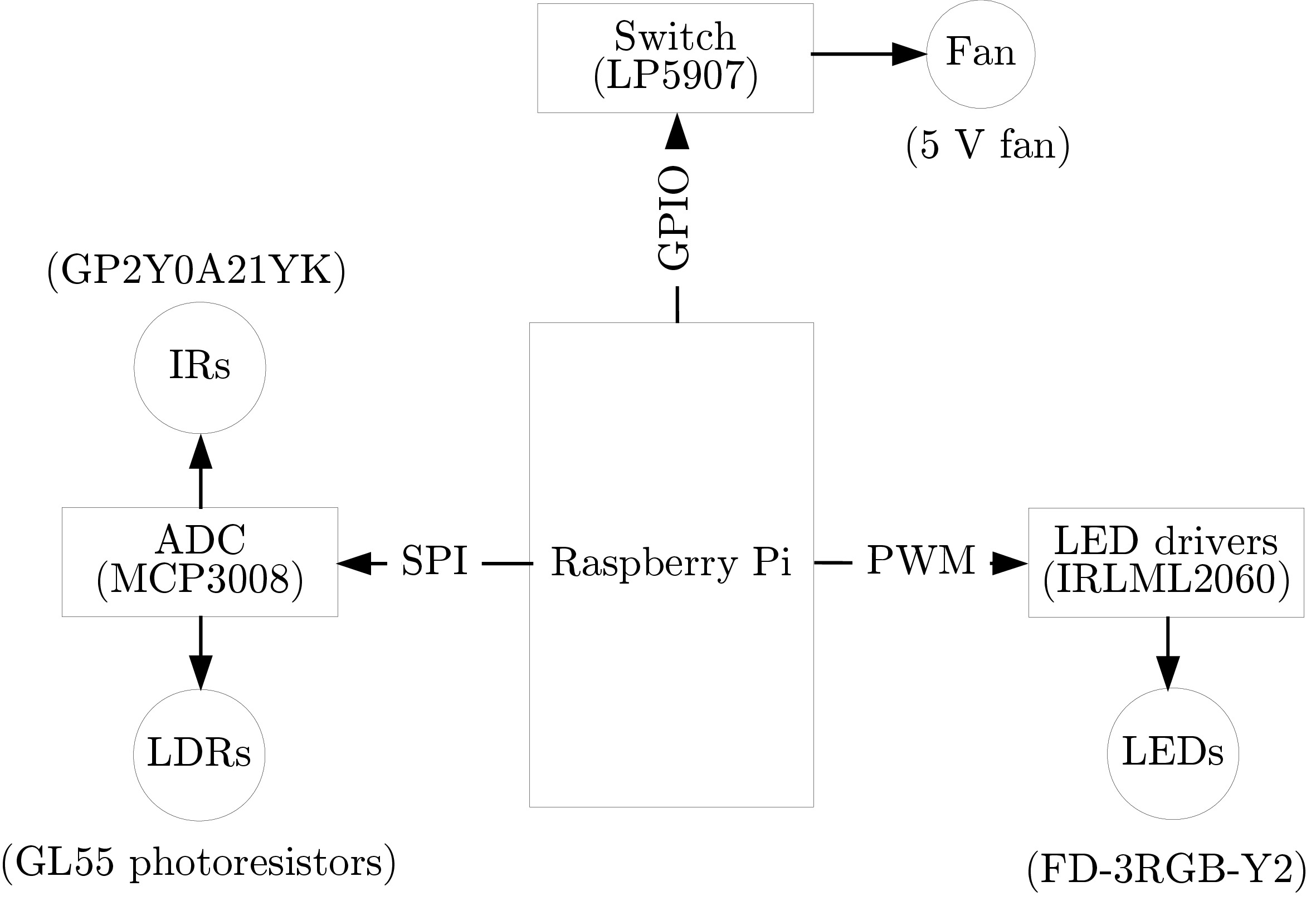
- Tüm bileşenleri tek tahta bilgisayarla birleştirin ( Şekil 2' deki blok diyagramına bakın). Montaj sonrası bakım için bilgisayarın kolayca erişilebildiğinden emin olun.
- Darbe genişliği modülasyonu kullanılarak LED sürücüleri ile bilgisayara arayüz LED 'Leri. LED 'Ler ile kasa veya soğutucu arasında sabit bir mekanik bağlantı kullanın ve LED 'Ler ile bilgisayar arasında mekanik olarak sınırlandırılmamış bir bağlantı kullanın.
- Arayüz fanlar bilgisayara doğrusal Regülatör (yani, switch) aracılığıyla genel amaçlı giriş/çıkış başlık pin kullanarak. Yeterli hava akımı mevcut olduğu zaman, Ayrıca onlara mekanik stres yerleştirilmesini sağlayarak fanlar Affix.
- Arayüz IR-yakınlık sensörleri ve Fotodirençler üzerinden analog-dijital dönüştürücü, seri çevre arayüzü kullanarak. Sensörlerden kasa için sabit bir mekanik bağlantı ve bilgisayara mekanik olarak sınırlandırılmamış bir bağlantı kullanın.
- Seçici lazer sinterleme, stereolitografi, erimiş birikme modelleme veya enjeksiyon kalıplama kullanılarak ısıya dayanıklı plastikten robot kılıfı üretin.
- Robotları, robotları yerinde tutan ve bitkilerin büyük olasılıkla ortalama büyüme yörüngeleri kısıtlayarak, bitkiler için tırmanma iskelesi olarak hizmet veren bir dizi modüler mekanik destek içine entegre edin. Onlar bitki büyüme yörüngeleri kesiştiği gibi konumlandırılmış, destek arasında tamamlayıcı mekanik eklem olarak hizmet robotlar tasarlayın.
- Robotun boyutunu en aza indirin ve seçilen bitki türlerinin desteklenmeyen büyüyen ucu tarafından güvenilir bir şekilde aşılabilir olduğundan emin olun. Deneme hızını artırmak için robotun boyutunu mümkün olan en büyük ölçüde azaltın.
- Robot gövdesinin dış duvarlarını şekillendirin, büyüyen bir ucu robotun etrafında dolaşırken mümkün olduğunca bitki büyümesi için göze batmayan olarak. Yuvarlak veya model robot vücut Twining bitki türlerinde circumnutation helisel yörüngesini engellemek değil. Keskin çıkıntılar ve akut girintileri dışlayın.
- Mekanik destek için bir malzeme ve profil (yani, çapraz kesit şekli) seçin, örneğin seçilen bitki türlerinin etkili bir şekilde tırmanabilir, örneğin dairesel profilli bir çap ile yaklaşık 8 mm veya daha az bir ahşap çubuk. Mekanik desteklerin yapısal olarak kurulumun arkasında şeffaf bir akrilik levha ile artırılmış, kurulum içinde bitkiler ve robotlar desteklemek için yeterince sert olduğundan emin olun.
- Her robot üzerinde belirtilen mekanik destekler çapa ek noktaları içerir. Bir bitkinin bir robota yaklaşacağı veya yola çıktığı her yönde bir tane ekleyin.
- Her bir ek noktası için, Destek malzemesinin kesitiyle eşleşen ölçümlendirmelere sahip robot kılıfı içine bir yuva ekleyin.
- Yuvayı 1 cm 'den az olmayan bir derinliğe ayarlayın. prizin robotun içindeki bileşenlerle çarpışmaz yeterince sığ tutun.
- Mekanik desteği, 45 ° veya steeper 'da eğim açısı ile düzenli olarak diyagonal bir desenle düzenleyin. Destek üniforma uzunlukları olun. Destek en az maruz kalan uzunluğu 30 cm, onların desteklenmeyen koşulunda bölgeyi keşfettikten sonra tırmanma bitkileri eklemek için yeterli yer sağlamak için. Tercih edilen maruz kalan Uzunluk 40 cm veya daha fazla olup, istatistiksel olarak aşırı bitki ataşmanı durumları için bazı tamponlara izin verilir.
- Mekanik elemanları robotlar ile birleştirin. Aşağıdaki protokol, 40 cm 'lik bir maruz kalan destek uzunluğunu ve dört satırda sekiz robotun kurulumunu varsayar (bkz. Şekil 6). Diğer boyutlar için buna göre ölçeklendirin.
- Zemin yüzeyinde, kurulumu dik konumda tutabilen, 125 cm genişliğinde bir stand oluşturun.
- Bir 125 cm x 180 cm levha (8 mm kalınlığında veya daha fazla) stand için şeffaf akrilik, böylece dik duruyor.
- Akrilik levha karşı, stand üzerinde uygun toprak ile kaplar konumlandırın.
- İki mekanik y-eklem akrilik levha, 10 cm tencereler üzerinde Affix. Eklemleri 45 cm ve 165 cm sağa, sırasıyla, stand sol kenarından konumlandırın.
- Sol y-eklem, sol ve sağa 45 ° eğilme ve sağ y-eklem, sola 45 ° eğilme bir destek yapıştıran iki desteği yapıştırmayın.
- Akrilik levha için iki robot Affix, ve daha önce yerleştirilen destekler uçları robot durumlarda soketlere yerleştirin. Robotları y-eklemlerin üzerinde 35 cm, sağ tarafta 10 cm ve 80 cm, stand sol kenarına konumlandırın.
- Kalan robotları ve destek diyagonal gridded desen (bkz. Şekil 6), robotların her satır önceki satırın 35 cm üzerinde olduğunu ve her robot yatay olarak doğrudan robotun veya y-eklem üzerinde konumlandırılmış bir yapıştırabilirsiniz desen tekrarlayın altında iki satır.
3. robot yazılımı
- Robotların tek tahta bilgisayarlarında bir işletim sistemi (örn., Ahubian) yükleyin.
- Her deneme sırasında, paralel olarak her robotun yazılım protokolünü çalıştırın, dağıtılmış otonom davranışlarını etkinleştirerek (bkz. Wahby ve al.14, pseudocode ve daha fazla ayrıntı için).
- Robot için iki olası devlet kurun: biri robotun yukarıda açıklanan yoğunlukta mavi ışık yayan bir uyarıcı durumu; diğeri, robotun ışık yayan ya da yukarıda açıklandığı gibi kırmızı ışığı yaydıkları bir uyku durumu.
- Uyarıcı devlet, mavi LED sürücüleri için gerekli parlaklığa karşılık gelen bir frekans ile tek tahta bilgisayar üzerinden bir darbe GENIŞLIĞI modülasyonu (PWM) sinyali gönderin.
- Uyuyan durumda, hiçbir LED tetikleyici, ya da gerekirse sadece kırmızı LED sürücüleri için bir PWM sinyali göndermek.
- Kontrol deneylerinde, tüm robotlar uyuyan durumu atayın.
- Tek karar deneylerinde, bir robot uyuyan devlet ve bir robot uyarıcı devlet atayın.
- Birden çok karar denemeleri, başlatma işlemi, aşağıdaki gibi başlatın.
- Mevcut deneyde test edilecek bitki büyüme deseninin tam yapılandırma haritası her robot için tedarik.
- Otomatik olarak yerelleştirme sensörleri veya el ile kullanarak, desen içinde robotun konumunu ayarlayın.
- Robotun konumunu sağlanan haritaya karşılaştırın. Eğer robotun konumu haritada ilk konumsa, robotu uyarıcıolarak ayarlayın; Aksi takdirde, robot uyuyaniçin ayarlayın. Başlatma işlemi sona erer.
- Birden fazla karar deneylerinde, direksiyon sürecini aşağıdaki gibi başlatın. Yinelemeli olarak yürütmek.
- Bir bitkinin tespit edilmiş olup olmadığını görmek için robotun IR-Proximity sensörü okumayı kontrol edin.
- Bir bitki algılandığında ve robot uykudaolarak ayarlanmışsa, o zaman koruyun.
- Eğer bir bitki algılandığında ve robot uyarıcıolarak ayarlanmışsa:
- Bitişik komşu robotlara bir bitkinin algılandığını bildirin ve robotun mesajda yerini içerir.
- Robotu uyuyanbir şekilde ayarlayın.
- Robotun konumunu haritaya karşılaştırın. Robot haritasındaki son konumda ise, o zaman deneme tamamlandığında WLAN üzerinden bir sinyal gönderin.
- Robotun gelen mesajları bitişik komşu robotlardan kontrol edin, bunlardan birinin uyarıcı olarak ayarlanmış bir bitki tespit ettiğini görmek için.
- Bir uyarıcı komşu bir bitki tespit ederse, bu komşunun yerini robotun konumuna karşılaştırın ve aynı zamanda haritaya karşılaştırın.
- Robot harita üzerinde sonraki konumda ise, uyarıcıiçin robot ayarlayın.
- Deneme tamamlandığında bir sinyal alındıktan sonra direksiyon sürecinin yinelemeli döngüsünü bitir.
4. bitki sağlığı izleme ve bakım prosedürü
- Kontrollü hava sıcaklığı ve nemiyle ve kontrollü toprak sulama ile kontrol edilen çevresel koşullarda deneme kurulumunu bulun, özellikle, aşağıda açıklanan koşullara göre hiçbir olay gün ışığı veya başka bir ışık olmayan kapalı. WLAN etkin olan bir mikrodenetleyiciye veya tek tahta bilgisayara bağlı sensörler ile koşulları izleyin.
- Robotların harici LED büyüme lambaları kullanarak ve deney kurulumuna bakan bitki fotosentezi koruyun.
- Kurulum için monokromatik kırmızı ışık sağlamak için büyüme lambaları kullanın, kırmızı diyotlar maksimum emisyon sahip yaklaşık ƛMax = 625 – 650 nm, aralığı dışında hiçbir kritik dalga boyu ile 550 – 700 nm, ortam mavi ışık düşük bir insidansı dışında, Eğer Seçilen türlerin sağlığı için yararlıdır. Ortam mavi ışık düşük bir insidansı dahil ise, tek bir robot tarafından yayılan bu çok küçük bir kısmını seviyeleri kısıtlamak.
- Seçilen türlerin sağlığı için gerekli kırmızı ışık düzeylerini sağlamak, genellikle kabaca 2000 lümen ya da toplam daha fazla.
- Büyüme lambalarını deney kurulumuna karşı karşıya yönlendirmek için, bu onların emiter büyüme alanı üzerinde kabaca eşit olarak dağıtılır.
- RGB renk sensörü kullanarak ortam ışığı koşullarını izleyin.
- Germinating sonra, her bitki kendi pot deneme kurulum tabanında sağlar. Seçilen türler için uygun toprak hacmi ve tipi sağlayın. Toprak ve tohumlar çimlenme öncesinde ayıklanmış emin olun. Böcekler varsa önlemek veya yönetmek için uygun haşere kontrol yöntemlerini kullanın.
- Isıtıcılar, klimalar, nemlendiriciler ve nem alma cihazları kullanılarak seçilen türler için hava sıcaklığı ve nem düzeylerini düzenler. Sıcaklık-basınç-Nem sensörü kullanarak seviyeleri izleyin.
- Toprak Nem sensörü kullanarak toprağı izleyin. Seçilen türler için sulama uygun bir oran koruyun. Sensör okumaları tarafından düzenlenmiş olarak, toprak Nem sensörü okumaları veya su topraklarının el ile tetiklendiği gibi, suyun topraklara teslim edildiği otomatik bir sulama sistemi kullanarak çalıştırın.
5. deney tasarımı
- Robotların ve mekanik destekleri, bir satırda ve iki sütundan daha küçük değil, deneyde test edilen büyüme alanını ve desenini kapsayacak kadar büyük bir ızgarada yerleştirin.
- Robotların alt satırının altında, standart diyagonal mekanik destekleri bir satır yerleştirin, Kurulum boyunca bu eşleşen. Bu desteklerin alt uçları kesiştiği yerde, ' y-eklem ' ile mekanik olarak onlara katılın. Kurulum tabanında her ' y-Joint ' için, bitki sağlık bakım koşulları yukarıda açıklanan ile Diagonal ızgara hücresi (10 cm maruz mekanik destek uzunluğu başına kabaca bir bitki) boyutuna göre bitkilerin bir üniforma sayısı bitki.
- Çalışacak bir deneme türü seçin ve ilgili yerlerde robotların miktarını ve dağıtımını seçin.
-
Deneme türü 1: denetim
Not: Bu deney tipi, fototropizm tetiklemek için ışık uyaranların bulunmayan koşullarda tırmanma tesislerinin büyümesini sınar. Herhangi bir boyut ve kurulum şekli üzerinde çalışabilir.- Tüm robotları uyku durumundan atar (bkz. Adım 3,4) ve sonuçlar el ile tamamlanıncaya kadar sürekli olarak çalıştırılır.
- Bitkiler mekanik destekleri eklemek olup olmadığını gözlemlemek. Başarılı bir deneyde, bitkilerin hiçbiri mekanik destekleri bulacaktır veya ekleyemeyecektir.
-
Deneme türü 2: tek karar
Not: Bu deney tipi, ikili opsiyon ile sunulan bitkilerin büyüme yörüngeleri test eder — bir destek bir uyuyan robot ve bir uyarıcı robot lider bir destek yol. Yalnızca minimum kurulum (yani, bir satır, iki sütun) üzerinde çalışır.- Bir robot uyku durumundan (bkz. 3,5) ve bir robot uyarıcı devlet atayın. İki robotdan biri IR-Proximity sensörlü bir bitki algılıncaya kadar sürekli çalıştırın.
- Mekanik destek, destek boyunca büyüme ve uyarıcı robot sensör okumaları için bitki eki gözlemlemek. Başarılı bir deneyde, uyarıcı devlet ile robot ilgili destek boyunca büyüdü sonra bir bitki algılayacak.
-
Deneme türü 3: Multiple-karar
Not: Bu deney tipi, önceden tanımlanmış bir küresel haritaya göre bir dizi kararı tetikleyen, birden fazla sonraki uyarıcı koşulunda sunulan bitkilerin büyümesini sınar. En az sayıda satır (yani, iki veya daha fazla) olan kurulum herhangi bir boyutu ve şekli üzerinde çalışabilir.- Robotlar yetişecek desen küresel bir harita sağlamak (bkz: Steps 3.6-3.7.7).
- Mekanik destekler boyunca bitki eki olaylarını ve büyüme desenini inceleyin.
- Başarılı bir deneyde, küresel haritasındaki her destek için en az bir bitki yetiştirilir.
- Ayrıca, başarılı bir denemede, büyüyen ucu Şu anda etkin karar noktasında bulunuyorsa hiçbir bitki yanlış yönde seçilecektir.
- Eğer örneğin bir dallanma olay harita üzerinde eski bir konuma yeni bir büyüyen ipucu yerleştirir Eğer burada yabancı büyüyen ipuçlarını dikkate alma.
-
Deneme türü 1: denetim
6. Kayıt prosedürü
- Sensörlerden ve kameralardaki verileri başlangıçta verilerin yerleşik olarak oluşturduğu tek tahta bilgisayarda saklayın. Son depolanmış sensör okuma gibi gerekli isteklere yanıt veren yerleşik yanıt sunucularını çalıştırın. Düzenli aralıklarla veri ve günlük dosyalarını WLAN üzerinden yerel ağa bağlı depolama (NAS) aygıtına yükleyin.
- Tam deneme kurulumunu kapsayan en az bir kamera görünümü ile iki veya daha fazla noktaya yerleştirilmiş kameraları kullanarak deneylerin zaman aşımı videolarını sürekli olarak yakalayın. Yakalanan görüntülerin yeterince bitki büyüyen ipuçları, genellikle sadece birkaç milimetre genişlikte hareketlerini yakalamak için yeterli çözünürlüğü yüksek olduğundan emin olun.
- Tek tahta bir bilgisayarda onboard kamera veya bir intervalometre ile otomatikleştirilmiş bağımsız bir dijital fotoğraf makinesi kullanarak yakalar arasında tutarlı zaman aralıkları sağlamak için görüntü yakalama sürecini otomatikleştirin. Kameralar için benzer şekilde otomatik yanıp sönen olarak hareket etmek için lambalar yükleyin. Yanıp sönen renk düzeltme için görüntüleri dramatik post-processing olmadan büyüme lambaları kırmızı ışık ile rekabet etmek için yeterince parlak olduğundan emin olun.
- Deneme kurulumunun tamamen aydınlatılabilir ve bu nedenle görüntülerde açıkça görülebilir gibi yanıp söner bulun. 2 s flaş döneminde tüm kameralar aynı anda görüntüleri yakalamak gibi kameralar ve yanıp sönen senkronize. Her deneme süresince her 2 dakikada bir görüntüleri yakalayın.
- Çevresel sensör verilerini, özellikle sıcaklık-basınç-Nem sensörü, RGB renk sensörü ve toprak nem sensöründen gelen ölçümleri günlüğe kaydetmek. Kurulumundaki tüm robotlardan gelen verileri, özellikle IR-Proximity sensörü ve photoresistor okumalarını, hem de LED emitemit durumunu tanımlayan robotun iç durumunu günlüğe kaydetmek.
- Tüm kaydedilmiş verileri, birkaç aya kadar tam deneme süresi boyunca doğru koşulların sürdürülmesini sağlamak için, düzenli gerçek zamanlı raporlar aracılığıyla deneylerin uzaktan izlenmesi için kullanılabilir hale getirmek.
Sonuçlar
Kontrol: Robotik stimuli olmadan bitki davranışı.
Mavi ışık eksikliği nedeniyle (yani, tüm robotlar uyuyan), pozitif fototropizm bitki tetiklenmez. Bu nedenle, bitkiler gravitropizm takip gibi tarafsız yukarı büyüme gösterir. Onlar da tipik circumnutation (yani, sarma) görüntülemek, Şekil 4Abakın. Beklendiği gibi, bitkiler uyuyan robotlar yol mekanik destek bulmak için başarısız. Bitkiler artık kendi ağırlığını desteklemediği zaman çökecek. En az iki bitki çökmesi deneylerini durduracağız, bkz. Şekil 4b, C.
Tek veya çoklu kararlar: Robotik stimuli ile bitki davranışı
Dört tek karar deneylerinde, iki çalışan Soldan Direksiyon (yani, bifurkasyon sol robot uyarıcıaktive edilir), ve iki koşum rightward direksiyon var. Uyarıcı robotlar doğru desteğe doğru bitkiler başarıyla yönlendirmek, Şekil 5bakın. En yakın bitki, doğru desteğe benzer olan kök açı ile ilk kez bağlanır. Her denemede, en az bir bitki desteğe bağlanır ve uyarıcı robotuna ulaşana kadar onu tırmanır ve böylece deneyi sonlandırır. Bir deneyde, ikinci bir bitki doğru desteğe bağlanır. Kalan bitkiler daha uzun deneme süreleri de iliştirebilir. Bitkilerin hiçbiri yanlış desteğe bağlanır. Her deney ortalama 13 gün boyunca sürekli olarak çalışır.
İki Çoklu karar deneylerinde, bitkiler önceden tanımlanmış bir Zigzag desenine dönüşür, bkz. Şekil 6a. Her deney yaklaşık yedi hafta boyunca çalışır. Bir deney başladığında, bir robot durumu uyarıcı olarak ayarlar (bkz. 3.6.3) ve bitkiler, öngörülen desenlere göre doğru desteğe doğru yönlendirecek. Bir bitki bağlanır ve bu nedenle ilk kararı tamamladıktan aktif uyarıcı robot gelen, onu tırmanıyor. 3.7.3 göre, mevcut uyarıcı robot sonra uyuyan olur ve bitişik komşuları bildirir. Zigzag desen sonraki uyuyan komşu uyarıcı için kendisini geçer (bkz 3.7.6). Bir bitki bir uyuyan robot tarafından algılandığında, bu robot tepki vermiyor (bkz. 3.7.2). Bitkiler devam eder ve kalan üç kararı başarıyla tamamlar. Önceden tanımlanmış Zigzag deseni bu nedenle tamamen yetiştirilen, bkz: Şekil 6B.
Tüm deney verileri, hem de videolar, online mevcuttur24.

Şekil 1. Mobil robot ve birincil bileşenleri. Şekil yazar yayınından yeniden yazdırılır Wahby ve al.14, Creative Commons License CC-by 4,0 ile kullanılan (ek dosyalara bakın), lisansla izin verilen değişikliklerle. Bu figürün daha büyük bir versiyonunu görmek Için lütfen tıklayınız.
{kind=link}

Şekil 2. Mobil robot elektroniği bileşen diyagramı. IRLML2060 LED sürücüleri, LED 'lerin parlaklığını kontrol etmek IÇIN PWM yoluyla robotun tek tahta bilgisayarı (örneğin Raspberry Pi) ile etkileşimde bulunur. Bir LP5907 anahtarı, fanı kontrol etmek için genel amaçlı giriş/çıkış (GPIO) başlık PIN 'i ile tek tahta bilgisayar ile arabirim. Bir MCP3008 analog-dijital dönüştürücü (ADC), analog IR ve ışık bağımlı direnç (LDR) sensörü verilerini okumak için seri çevresel arayüz (SPI) aracılığıyla tek tahta bilgisayarla etkileşimde bulunmaktadır. Bu figürün daha büyük bir versiyonunu görmek Için lütfen tıklayınız.
{kind=link}

Şekil 3. Kısa bir süre sonra ' 03.04.16, ' bir bitki ucu bir destek tırmanıyor ve robot görüş alanına ulaştı. (A) bir deney sırasında örnek IR-yakınlık sensörü ölçekli voltaj okumaları (dikey eksen). Daha yüksek değerler bitki ucu algılaması gösterir. (B) IR-Proximity sensörü, etkin bitki ucu algılaması sağlamak için destek ekine göre yerleştirilir ve yönlendirilir. Şekil yazar yayınından yeniden yazdırılır Wahby ve al.14, Creative Commons License CC-by 4,0 ile kullanılan (ek dosyalara bakın), lisansla izin verilen değişikliklerle. Bu figürün daha büyük bir versiyonunu görmek Için lütfen tıklayınız.
{kind=link}

Şekil 4. Kontrol denemeleri sonuç çerçeveleri tüm dört bitki mavi ışık yokluğunda herhangi bir desteğe iliştirmek vermedi gösteren. (A) beş gün sonra, tüm bitkiler kontrol deneylerinden birinde yukarı büyüyen (bkz (C) daha sonra büyüme durumu için). (B) 15 gün sonra, üç bitki çöktü ve biri hala ilk kontrol deneyi yukarı büyüyor. (C) yedi gün sonra, iki bitki çöktü, ve iki hala ikinci kontrol deneyi yukarı büyüyen (bkz (A) önceki büyüme durumu için). Şekil yazar yayınından yeniden yazdırılır Wahby ve al.14, Creative Commons License CC-by 4,0 ile kullanılan (ek dosyalara bakın), lisansla izin verilen değişikliklerle. Bu figürün daha büyük bir versiyonunu görmek Için lütfen tıklayınız.
{kind=link}

Şekil 5. Tek karar denemeleri sonuç çerçeveleri bir uyarıcı robot yeteneğini ikili bir karar yoluyla bitkiler yönlendirmek için, doğru destek tırmanmaya gösteren. Dört denemelerde, bir robot, bir kavşağın iki karşı tarafında, uyaran ve diğeri de uykudaolarak ayarlanmıştır. Çerçeveler, uyarıcı robot onları algıladıktan hemen önce bitkilerin yerini gösterir. Her deneme en az bir bitki doğru desteğe bağlanır ve hiçbir bitki yanlış bir bağlanır. Ayrıca, desteklenmeyen bitkiler büyüme uyarıcı robot doğru önyargılı gösterir. E, F, G, H sırasıyla A, B, C, D 'nin yakın çekimler. Şekil yazar yayınından yeniden yazdırılır Wahby ve al.14, Creative Commons License CC-by 4,0 ile kullanılan (ek dosyalara bakın), lisansla izin verilen değişikliklerle. Bu figürün daha büyük bir versiyonunu görmek Için lütfen tıklayınız.
{kind=link}

Şekil 6. Birden fazla karar deneyi. (A) hedeflenen Zigzag deseni haritada yeşil renkte vurgulanır. (B) denemeden son çerçeve (40 gün sonra), model üzerinde son uyarıcı robot önce bitkilerin durumunu gösteren onları algılar. Robotlar Zigzag desenini başarıyla büyüttü. Şekil yazar yayınından yeniden yazdırılır Wahby ve al.14, Creative Commons License CC-by 4,0 ile kullanılan (ek dosyalara bakın), lisansla izin verilen değişikliklerle. Bu figürün daha büyük bir versiyonunu görmek Için lütfen tıklayınız.
{kind=link}
Tartışmalar
Sunulan metodoloji, özel desenler oluşturmak için, bitki büyüme stimuli güdümlü direksiyon otomatikleştirme doğru ilk adımları gösterir. Bu, tek bir deney kurulumunda biyokimyasal büyüme yanıtlarının farklı alemleri ve mühendislik Mekatronik fonksiyonları-algılama, iletişim ve uyaranların kontrollü nesil birleştirerek bitki sağlığını sürekli bakım gerektirir. Burada odaklanmamız gibi bitkiler tırmanma, mekanik destek de ayrılmaz bir parçasıdır. Geçerli kurulum bir sınırlama onun ölçek, ama biz metodolojisi kolayca ölçekler inanıyoruz. Mekanik iskele daha büyük kurulumlar için uzatılabilir ve bu nedenle daha uzun büyüme dönemleri, bu da genişletilmiş yapılandırmaları ve desenleri sağlar. Burada kurulum iki boyut ve ikili sol-sağ kararlar ile sınırlıdır, büyüme mekanik destek 45 ° eğim bir ızgara ile sınırlı olduğu gibi, ve bitki karar pozisyonları bu ızgaranın bifurcations sınırlıdır. Mekanik uzantılar, karmaşık şekiller için izin vermek için 3D iskele ve farklı malzemeler içerebilir9,19. Metodoloji, bir kullanıcı tarafından tanımlanan desenleri otomatik olarak büyütmek için bir sistem olarak kabul edilebilir. Mekanik konfigürasyonların olası karmaşıklığını genişleterek, kullanıcıların istenilen desenler üzerinde birkaç kısıtlama karşı karşıya olmalıdır. Böyle bir uygulama için, bir kullanıcı yazılım aracı desen üretilebilir olduğunu teyit etmelidir, ve Mekatronik sonra kendi kendine bitkiler yönlendirmek için uygun uyaranlara oluşturarak desen üretimini organize gerekir. Yazılım aynı zamanda orijinal planlı desen kısmen başarısız olursa büyüme ile nasıl devam edeceğini belirleyen kurtarma planları ve politikaları içerecek şekilde uzatılmalıdır-Örneğin ilk aktif robot bir bitki tespit asla ama uyuyan olanlar var büyüyen ipuçlarının konumunun aktif robotun ötesinde olduğunu gördüm.
Sunulan metodoloji, protokol seçim kriterlerini karşılayan bir örnek bitki türleri tırmanma ortak fasulye, P. vulgaris olduğunu. Bu temsili sonuçlarında kullanılan türüdür. P. vulgaris UV-A ve mavi ışık için güçlü pozitif fototropizm olduğu gibi, phototropins (ışık reseptör proteinleri) bitki dalga boylarına karşılık gelen fotonları emer 340-500 Nm. Reseptörler tetiklendiğinde, ilk şişlik, tetiklenen reseptörlere karşı gelen kök dokulara su Tercihli yerleşim tarafından meydana gelecek, geri dönüşümlü bir yön yanıtı neden. Sonra, kök içinde, oksin vardır (bitki desen hormonu) aynı doku konumuna yönlendirilir, yön tepkisi sürdürüyor ve onlar güçlendirerek kök dokularda sabitleme. Bu davranış, bitkiler sadece izole mavi ışık ve izole kırmızı ışık maruz olduğu gibi, bu kontrollü kapalı koşullarda bitkiler şekillendirme için kullanılabilir, onu müdahale etmez düşük yeterli seviyelerde IR yakınlık sensörlerden olay çok kırmızı ışık gölge önleme tepkisi gibi davranışlar ile20,21. Bitkinin phototropism reaksiyon tepe emisyon ƛmax = 465 NM ile mavi diyotlar ışık kurulum yanıt ve fotosentez22,23 bitki içinde tepe emisyon ƛmax = 650 nm ile kırmızı diyotlar tarafından desteklenir. P. vulgaris yükseklik birkaç metre kadar büyüyen genel kurulum uygun, yaklaşık 3 L ticari Bahçe toprak pot başına gerekli kurulum ölçeği uyar.
Mevcut kurulum bir cazibe uyarıcı olarak ışık odaklanır rağmen, ek uyaranlara diğer deneme türleri için ilgili olabilir. İstenilen desen bitkiler farklı gruplar arasında bir ayrım gerektiriyorsa (örneğin, istenilen desen karşı taraf seçmek için bitkilerin iki grup ihtiyacı), o zaman uyaran sadece bir tür kullanılarak uygulanabilir olmayabilir. İskele şeklinden bağımsız bu tür kompleks büyüme desenleri için, bitkilerin farklı grupları potansiyel olarak farklı zaman dilimlerinde yetiştirilebilir, bu da kendi cazibe uyaranların müdahale etmediğini, bu da dallanma entegrasyonu sağlar Olay. Ancak, bu her zaman uygun bir çözüm olmayabilir, ve standart çekici ışık uyarıcı daha sonra gölgelendirme, ya da uzak kırmızı ışık veya titreşim motorları gibi diğer uyarıcılar tarafından azaltma etkileri tarafından artırılmış olabilir9,14.
Sunulan Yöntem ve deney tasarımı, bitkilerin yönlü büyümesini otomatik olarak etkilemek için sofistike bir metodoloji için yalnızca ilk adımıdır. Deney kurulumu, bitkilerin sadece bir dizi ikili kararlar belirleyerek temel ve biz bir odaklanmak, Stimulus yönetmek kolay. Ek çalışmalar yöntemin istatistiksel önemini kanıtlamak için, daha fazla uyarıcı eklemek ve dallanma gibi diğer süreçleri kontrol etmek için gerekli olacaktır. Robotların uzun vadeli güvenilirliğini garanti altına almak için yeterli gelişim ile, sunulan metodoloji uzun süre boyunca bitki deneylerinin otomasyonu için izin verebilir, bitki geliştirme aşamalarında çalışma ile ilgili yükü azaltarak Bu çekimleri ötesinde. Benzer yöntemler, biyolojik organizmalar ve otonom robotlar arasındaki incelenebilir dinamiklere gelecekteki araştırmalar için izin verebilir, iki sıkı birleştiğinde kendi kendini düzenleyen Bio-hibrid sistemleri olarak hareket.
Açıklamalar
Yazarlar, rakip finansal çıkarların olmadığını beyan ederler.
Teşekkürler
Bu çalışmada, Avrupa Birliği 'nin Horizon 2020 araştırma ve yenilik programından fon alan Flora Robotica projesi tarafından desteklenmektedir, No. 640959. Yazar, Anastasios Getsopulos ve Ewald Neufeld 'e donanım montajında katkılarından ötürü ve Tanja Katharina Kaiser 'e tesis deneylerinin izlenmesinde katkısı için teşekkür ediyorlar.
Malzemeler
| Name | Company | Catalog Number | Comments |
| 3D printed case | Shapeways, Inc | n/a | Customized product, https://www.shapeways.com/ |
| 3D printed joints | n/a | n/a | Produced by authors |
| Adafruit BME280 I2C or SPI Temperature Humidity Pressure Sensor | Adafruit | 2652 | |
| Arduino Uno Rev 3 | Arduino | A000066 | |
| CdS photoconductive cells | Lida Optical & Electronic Co., Ltd | GL5528 | |
| Cybertronica PCB | Cybertronica Research | n/a | Customized product, http://www.cybertronica.de.com/download/D2_node_module_v01_appNote16.pdf |
| DC Brushless Blower Fan | Sunonwealth Electric Machine Industry Co., Ltd. | UB5U3-700 | |
| Digital temperature sensor | Maxim Integrated | DS18B20 | |
| High Power (800 mA) EPILED - Far Red / Infra Red (740-745 nm) | Future Eden Ltd. | n/a | |
| I2C Soil Moisture Sensor | Catnip Electronics | v2.7.5 | |
| IR-proximity sensors (4-30 cm) | Sharp Electronics | GP2Y0A41SK0 | |
| LED flashlight (50 W) | Inter-Union Technohandel GmbH | 103J50 | |
| LED Red Blue Hanging Light for Indoor Plant (45 W) | Erligpowht | B00S2DPYQM | |
| Low-voltage submersible pump 600 l/h (6 m rise) | Peter Barwig Wasserversorgung | 444 | |
| Medium density fibreboard | n/a | n/a | For stand |
| Micro-Spectrometer (Hamamatsu) on an Arduino-compatible breakout board | Pure Engineering LLC | C12666MA | |
| Pixie - 3W Chainable Smart LED Pixel | Adafruit | 2741 | |
| Pots (3.5 l holding capacity, 15.5 cm in height) | n/a | n/a | |
| Power supplies (5 V, 10 A) | Adafruit | 658 | |
| Raspberry Pi 3 Model B | Raspberry Pi Foundation | 3B | |
| Raspberry Pi Camera Module V2 | Raspberry Pi Foundation | V2 | |
| Raspberry Pi Zero | Raspberry Pi Foundation | Zero | |
| RGB Color Sensor with IR filter and White LED - TCS34725 | Adafruit | 1334 | |
| Sowing and herb soil | Gardol | n/a | |
| String bean | SPERLI GmbH | 402308 | |
| Transparent acrylic 5 mm sheet | n/a | n/a | For supplemental structural support |
| Wooden rods (birch wood), painted black, 5 mm diameter | n/a | n/a | For plants to climb |
Referanslar
- Åstrand, B., Baerveldt, A. J. An agricultural mobile robot with vision-based perception for mechanical weed control. Autonomous Robots. 13 (1), 21-35 (2002).
- Blackmore, B. S. A systems view of agricultural robots. Proceedings of 6th European conference on precision agriculture (ECPA). , 23-31 (2007).
- Edan, Y., Han, S., Kondo, N. Automation in agriculture. Springer handbook of automation. , Springer. Berlin, Heidelberg. 1095-1128 (2009).
- Van Henten, E. J., et al. An autonomous robot for harvesting cucumbers in greenhouses. Autonomous Robots. 13 (3), 241-258 (2002).
- Al-Beeshi, B., Al-Mesbah, B., Al-Dosari, S., El-Abd, M. iplant: The greenhouse robot. Proceedings of IEEE 28th Canadian Conference on Electrical and Computer Engineering (CCECE). , 1489-1494 (2015).
- Giraldo, J. P., et al. Plant nanobionics approach to augment photosynthesis and biochemical sensing. Nature Materials. 13 (4), (2014).
- Mazarei, M., Teplova, I., Hajimorad, M. R., Stewart, C. N. Pathogen phytosensing: Plants to report plant pathogens. Sensors. 8 (4), 2628-2641 (2008).
- Zimmermann, M. R., Mithöfer, A., Will, T., Felle, H. H., Furch, A. C. Herbivore-triggered electrophysiological reactions: candidates for systemic signals in higher plants and the challenge of their identification. Plant Physiology. , 01736(2016).
- Hamann, H., et al. Flora robotica--An Architectural System Combining Living Natural Plants and Distributed Robots. , arXiv preprint arXiv. 1709.04291 (2017).
- Arkin, R. C., Egerstedt, M. Temporal heterogeneity and the value of slowness in robotic systems. Proceedings of IEEE International Conference on Robotics and Biomimetics (ROBIO). , 1000-1005 (2015).
- Mahlein, A. K. Plant disease detection by imaging sensors-parallels and specific demands for precision agriculture and plant phenotyping). Plant Disease. 100 (2), 241-251 (2016).
- Wahby, M., et al. A robot to shape your natural plant: the machine learning approach to model and control bio-hybrid systems. Proceedings of the Genetic and Evolutionary Computation Conference (GECCO '18). , ACM. New York, NY, USA. 165-172 (2018).
- Bastien, R., Douady, S., Moulia, B. A unified model of shoot tropism in plants: photo-, gravi-and propio-ception. PLoS Computational Biology. 11 (2), e1004037(2015).
- Wahby, M., et al. Autonomously shaping natural climbing plants: a bio-hybrid approach. Royal Society Open Science. 5 (10), 180296(2018).
- Liscum, E., et al. Phototropism: growing towards an understanding of plant movement. Plant Cell. 26, 38-55 (2014).
- Christie, J. M., Murphy, A. S. Shoot phototropism in higher plants: new light through old concepts. American Journal of Botany. 100, 35-46 (2013).
- Migliaccio, F., Tassone, P., Fortunati, A. Circumnutation as an autonomous root movement in plants. American Journal of Botany. 100, 4-13 (2013).
- Gianoli, E. The behavioural ecology of climbing plants. AoB Plants. 7, (2015).
- Vestartas, P., et al. Design Tools and Workflows for Braided Structures. Proceedings of Humanizing Digital Reality. , Springer. Singapore. 671-681 (2018).
- Pierik, R., De Wit, M. Shade avoidance: phytochrome signalling and other aboveground neighbour detection cues. Journal of Experimental Botany. 65 (10), 2815-2824 (2014).
- Fraser, D. P., Hayes, S., Franklin, K. A. Photoreceptor crosstalk in shade avoidance. Current Opinion in Plant Biology. 33, 1-7 (2016).
- Hogewoning, S. W., et al. Photosynthetic Quantum Yield Dynamics: From Photosystems to Leaves. The Plant Cell. 24 (5), 1921-1935 (2012).
- McCree, K. J. The action spectrum, absorptance and quantum yield of photosynthesis in crop plants. Agricultural Meteorology. 9, 191-216 (1971).
- Wahby, M., et al. Autonomously shaping natural climbing plants: a bio-hybrid approach [Dataset]. , Available from: https://doi.org/10.5281/zenodo.1172160 (2018).
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiDaha Fazla Makale Keşfet
This article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır