
Method Article
Роботизированное зондирование и стимулы Положение для управляемого роста завода
В этой статье
Резюме
Распределенные узлы робота обеспечивают последовательности стимулов синего света, чтобы направить траектории роста альпинистских растений. Активируя естественный фототропизм, роботы направляют растения через двоичные лево-правые решения, превращая их в предопределенные закономерности, которые, напротив, невозможны, когда роботы дремлют.
Аннотация
Робот системы активно исследуются для манипуляции природных растений, как правило, ограничивается сельскохозяйственной автоматизации деятельности, такие как урожай, орошение и механический контроль сорняков. Расширяя это исследование, мы вводим здесь новую методологию для манипулирования направленным ростом растений с помощью их естественных механизмов сигнализации и распределения гормонов. Эффективная методология обеспечения роботизированных стимулов может открыть возможности для новых экспериментов с более поздними этапами развития растений или для новых биотехнологических применений, таких как формирование растений для зеленых стен. Взаимодействие с растениями создает несколько роботизированных задач, включая зондирование малых и переменных органов растений на короткой дистанции, а также контролируемое активацию реакций растений, которые влияют на окружающую среду в дополнение к предоставленным стимулам. Для того, чтобы направить рост растений, мы разрабатываем группу неподвижных роботов с датчиками, чтобы обнаружить близость растущих советов, и с диодами, чтобы обеспечить световые стимулы, которые активируют фототропизм. Роботы тестируются с восхождением общей фасоли, Phaseolus vulgaris, в экспериментах, имеющих продолжительность до пяти недель в контролируемой среде. С роботами последовательно излучающих синий светло-пикового выброса на длине волны 465 нм-завод роста успешно управляется через последовательные двоичные решения вдоль механических опор для достижения целевых позиций. Модели роста тестируются в установке высотой до 180 см, при этом стебли растений выращены примерно до 250 см в кумулятивной длине в течение примерно семи недель. Роботы координируют свои действия и работают полностью автономно. Они обнаруживают приближающиеся советы завода с помощью инфракрасных датчиков близости и общаются по радио, чтобы переключаться между раздражителями синего света и спящим статусом, по мере необходимости. В целом полученные результаты поддерживают эффективность сочетания методологий экспериментов роботов и растений для изучения потенциально сложных взаимодействий между природными и инженерными автономными системами.
Введение
В соответствии с растущей распространенностью автоматизации в производстве и производстве, роботы используются для посевания, лечения и сбора растений1,2,3,4,5. Мы используем роботизированную технологию для автоматизации экспериментов на растениях неинвазивным способом, с целью рулевого роста с помощью направленных реакций на раздражители. Традиционные методы садоводства включали ручное формирование деревьев и кустарников с помощью механического удерживания и рубки. Мы представляем методологию, которая может быть применена, например, к этой формирующей задаче, управляя шаблонами роста с помощью стимулов. Наша представленная методология также является шагом к автоматизированным экспериментам на заводе, здесь с особым акцентом на предоставление световых стимулов. После того, как технология стала надежной и надежной, этот подход имеет потенциал для сокращения расходов на завод эксперименты и для новых автоматизированных экспериментов, которые в противном случае было бы неосуществимым из-за накладных расходов во времени и ручного труда. Роботизированные элементы свободно программируемы и действуют автономно, так как оснащены датчиками, приводами для обеспечения стимулов и микропроцессорами. В то время как мы фокусируемся здесь на зондировании близости (т.е. измерении расстояний с близкого расстояния) и световых стимулах, многие другие варианты осуществимы. Например, датчики могут быть использованы для анализа цвета растений, для мониторинга биохимической активности6, или для фитосенсирования7 подходов для мониторинга, например, состояния окружающей среды с помощью электрофизиологии растений8. Аналогичным образом, варианты актуатора могут предоставлять другие типы стимулов9, через вибрационные двигатели, опрыскивание устройств, обогревателей, вентиляторов, затененных устройств или манипуляторов для направленного физического контакта. Дополнительные стратегии активации могут быть реализованы, чтобы обеспечить медленную мобильность роботов (т.е. "медленных ботов"10),таким образом, что они могли бы постепенно менять положение и направление, с которого они обеспечивают стимулы. Кроме того, поскольку роботы оснащены однобортными компьютерами, они могут запускать более сложные процессы, такие как видение фенотипирования растений11 или искусственных нейронных контроллеров сети для активации стимулов12. Поскольку научно-исследовательская работа растений часто сосредоточена на раннем росте (т.е. в побегах)13, вся область использования автономных роботизированных систем для влияния на растения в течение более длительных периодов кажется недостаточно изученной и может предложить много будущих возможностей. Идя еще дальше, роботизированные элементы можно рассматривать как сами объекты исследований, что позволяет изучать сложную динамику биогибридных систем, образованных роботами и растениями, тесно взаимодействующими. Роботы избирательно навязывают растения стимулы, растения реагируют в соответствии с их адаптивным поведением и меняют структуру роста, которая впоследствии обнаруживается роботами с помощью датчиков. Наш подход закрывает цикл поведенческой обратной связи между растениями и роботами и создает гомеостатический цикл управления.
В наших экспериментах, чтобы проверить функцию робота системы, мы исключительно использовать восхождение общей фасоли, Phaseolus vulgaris. В этой установке, мы используем альпинистские растения, с механическими опорами в сетчатой эшафот общей высоты 180 см, так что растения находятся под влиянием тигмотропизма и имеют ограниченный набор направлений роста на выбор. Учитывая, что мы хотим, чтобы сформировать все растение в течение нескольких недель, мы используем голубой свет стимулы влиять на фототропизм растения макроскопически, в течение различных периодов роста, включая молодые побеги, а затем стволовых ужесточения. Мы проводим эксперименты в полностью контролируемых условиях окружающего света, где, кроме синих световых стимулов, мы обеспечиваем исключительно красный свет, с пиковым излучением на длине волны 650 нм. Когда они достигают бифуркации в механической сетке поддержки, они принимают двоичное решение, расти ли влево или вправо. Роботы расположены на этих механических бифуркиционях, разделенных расстояниями 40 см. Они автономно активируют и деактивируют свои выбросы синего света, с пиковым излучением на длине волны 465 нм, согласно заданной карте желаемой модели роста (в данном случае зигзагообразной картины). Таким образом, растения руководствуются от бифуркации к бифуркации в определенной последовательности. Только один робот активируется в данный момент времени, в течение которого он излучает синий свет, автономно отслеживая рост растений на механической поддержке под ним. Как только он обнаруживает растущий кончик с помощью инфракрасных датчиков близости, он перестает излучать синий свет и общается с соседними роботами по радио. Робот, который определяет себя как следующая цель в последовательности, затем затем активируется, привлекая рост растений к новой механической бифуркации.
Поскольку наш подход включает в себя как инженерные, так и природные механизмы, наши эксперименты включают в себя несколько методов, которые работают одновременно и взаимозависимо. Протокол здесь сначала организован по типу метода, каждый из которых должен быть интегрирован в единую экспериментальную установку. Эти типы выбор видов растений; дизайн робота, включая аппаратное обеспечение и механику; робот программное обеспечение для связи и управления; и мониторинг и поддержание здоровья растений. Затем протокол переходит к разработке эксперимента, за которым следует сбор и запись данных. Для получения подробной информации о результатах, полученных до сих пор, см. Wahby et al.14. Репрезентативные результаты охватывают три типа экспериментов- контрольные эксперименты, где все роботы не обеспечивают стимулы (т.е. находятся в состоянии покоя); однорешение экспериментов, где завод делает двоичный выбор между одним стимулом предоставления робота и тот, который находится в состоянии покоя; и эксперименты с несколькими решениями, в которых растение перемещается по последовательности бинарных вариантов для роста предопределенного шаблона.
протокол
1. Процедура отбора видов растений
ПРИМЕЧАНИЕ: Этот протокол фокусируется на поведении растений, связанных с альпинизмом, направленной реакцией на свет, а также на здоровье и выживание растений в определенный сезон, местоположение и экспериментальные условия.
- Выберите вид растений, известный, чтобы показать сильный положительный фототропизм15,16 к УФ-А и синий свет (340-500 нм) в растущих советов.
- Выберите вид, который является ветровкой, в которой поведение околодымят17 произносится и растущий кончик имеет свисовые траектории с достаточно большой амплитудой, чтобы ветром вокруг механических опор, используемых в конкретных экспериментальных условиях. Поведение скручивания18, выставленное выбранной обмотки, должно переносить окружающую среду и условия питательных веществ, присутствующие в эксперименте, и должно переносить механические опоры с углом наклона до 45 градусов.
- Выберите вид, который будет расти надежно и быстро в экспериментальных условиях, со средней скоростью роста не менее 5 см в день, и желательно быстрее, если это возможно.
- Выберите вид, который будет отображать требуемое поведение в настоящее время и географическое положение.
- Убедитесь, что вид переносит диапазон параметров окружающей среды, которые будут присутствовать в экспериментальной установке. Растение должно переносить отсутствие зеленого света и отсутствие света вне видимого спектра (400-700 нм). Растение должно также мириться с любыми нынешними колебаниями температуры, сохраняющимися на уровне примерно 27 градусов по Цельсию, а также любыми нынешними колебаниями влажности и полива.
2. Условия робота и конструкция
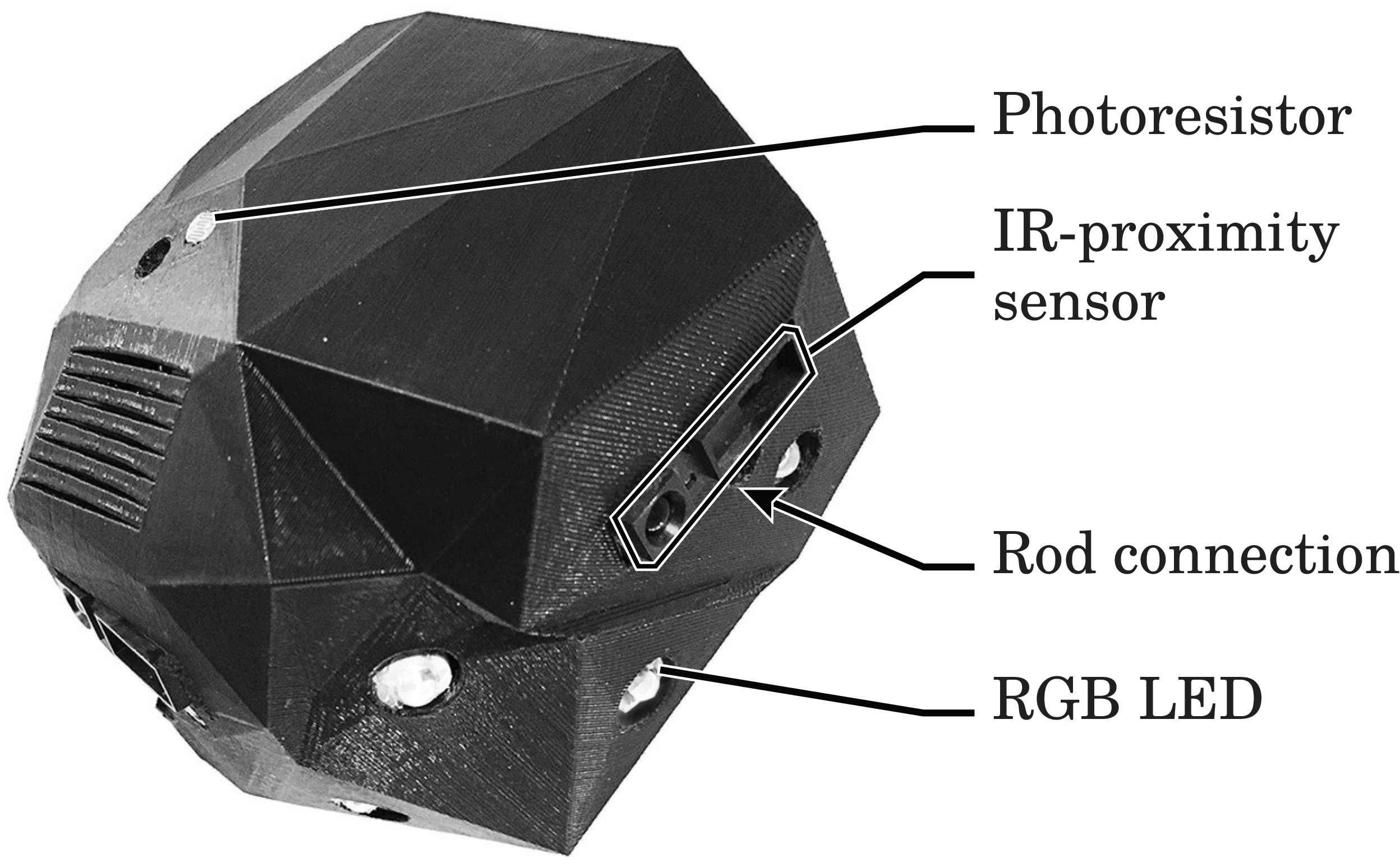
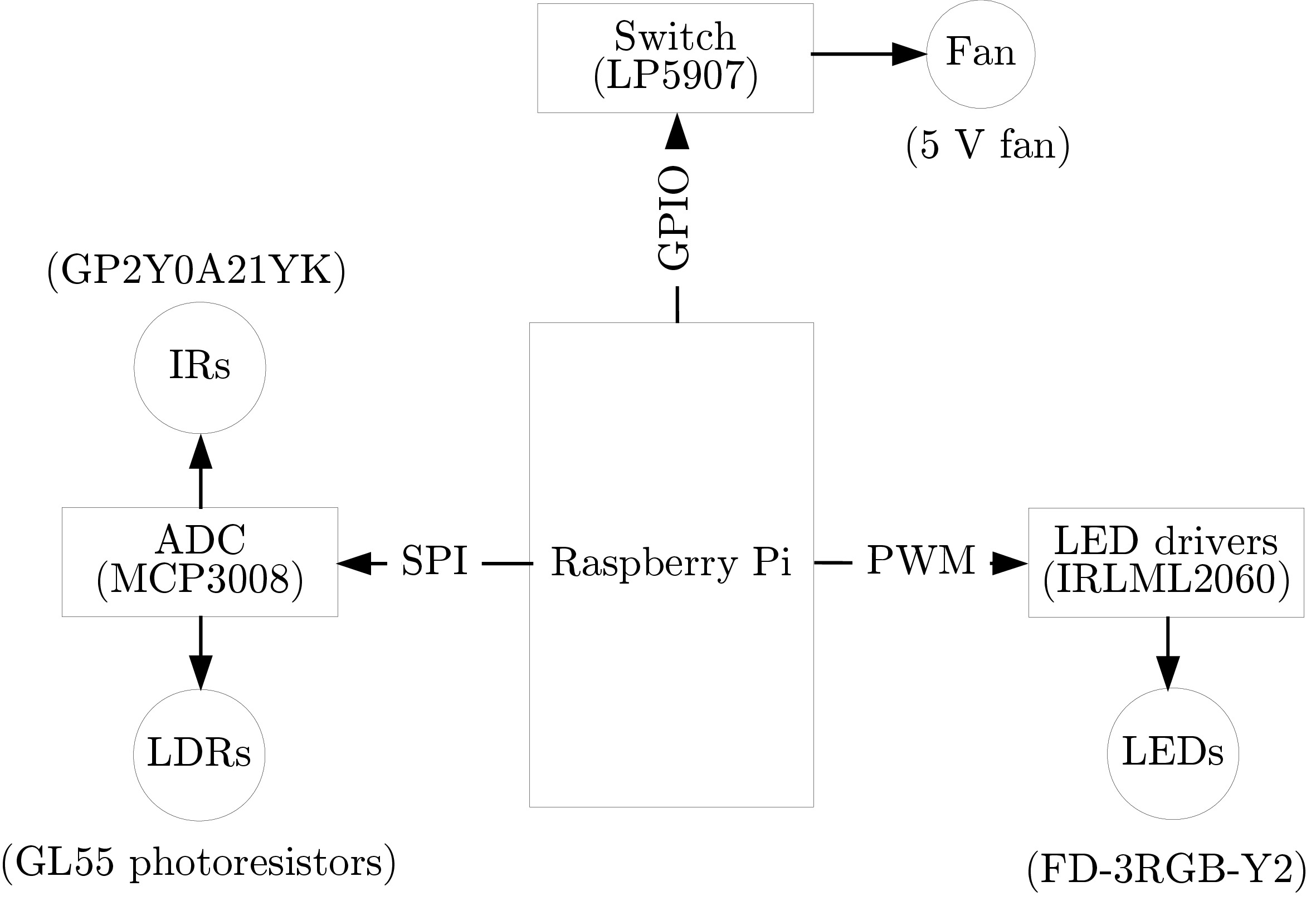
- Организуйте возможности робота в децентрализованные узлы с однобортными компьютерами (см. Рисунок 1 и Рисунок2), интегрированные в модульные механические опоры. Убедитесь, что каждый идентичный узлы робота способен контролировать и выполнять свое поведение.
- Для роботизированного обеспечения стимулов растениями, обеспечить синий свет (400-500 нм) для растений с контролируемыми интервалами, с интенсивностью, которая вызовет их фототропный ответ, от направления и ориентации, необходимых для соответствующей части эксперимента .
- Выберите красно-зелено-синий (RGB) светоизлучающий диод (LED) или изолированный синий светодиод. В любом случае, включите светодиод с синим диодом с пиковым излучениеми макс- 465 нм.
- Выберите светодиод, который при сходе в группы и установлении в точных условиях использованного робота может поддерживать необходимый уровень интенсивности света в каждом направлении, испытанной в установке эксперимента. Для каждого направления тестируется, убедитесь, что синие диоды в светодиодах в одном роботе коллективно способны поддерживать уровень интенсивности света около 30 люменов без перегрева, при расположении в использованном корпусе робота и любой использованный стратегии рассеивания тепла. Выбранный светодиод должен иметь угол обзора около 120 ".
ПРИМЕЧАНИЕ: Например, в роботе, используя три светодиода в направлении, с микроконтроллером с поддержкой регулирования интенсивности, если синие диоды излучают с максимальной интенсивностью света - 15 люменов, то без перегрева они должны быть в состоянии поддерживать 65% от максимума.) - Интерфейс светодиодов для робота однобортный компьютер, через светодиодные драйверы, которые регулируют блок питания в соответствии с требуемой яркостью. Включите индивидуальный контроль, либо из каждого светодиода или светодиодных групп, обслуживающих каждое направление, тестируемое в настройке.
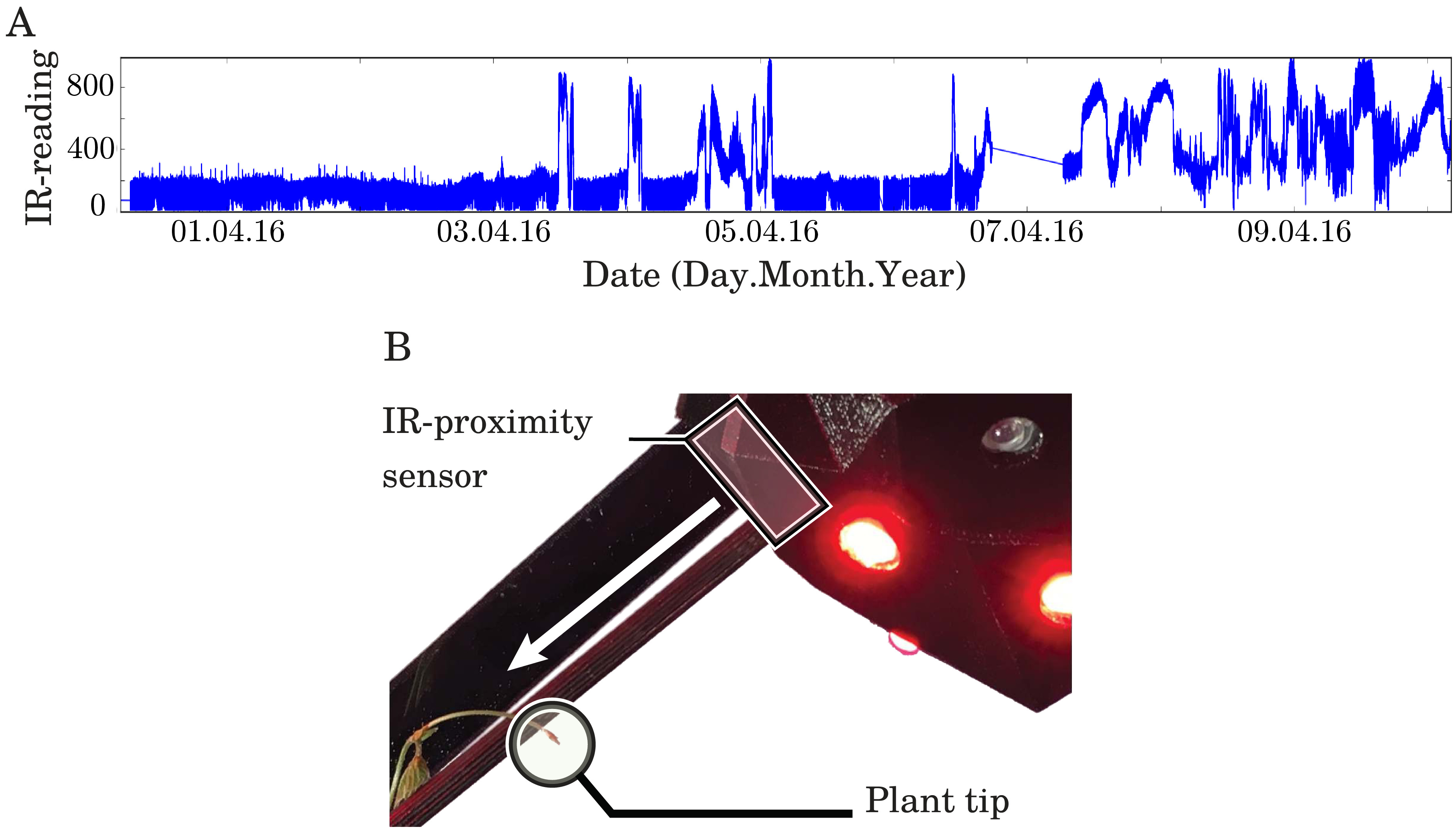
- Для процедуры зондирования для близости растений советы (см. Рисунок 3B), использование обработанных показаний от инфракрасной близости (ИК-близость) датчики надежно и автономно обнаружить наличие растений, приближающихся с каждого направления испытания в установке.
- Выберите датчик ИК-близости, который регулярно обнаруживает растущую кончик выбранного вида растений, когда расположен ы перпендикулярно центральной оси направления, с которого растение приближается, как это тестируется в беспрепятственной среде. Обеспечить успешное обнаружение происходит, начиная с расстояния 5 см, как видно на рисунке 3A, начиная с метки времени с пометкой с надписью '07.04.16' на горизонтальной оси.
- Интерфейс каждого датчика ИК-близости к однобортному компьютеру робота, и реализовать взвешенный арифметический средний подход для обработки показаний датчика в определение того, присутствует ли растение в пределах 5 см. Используйте показания датчика из последних пять с, чтобы дать 20% от конечного среднего веса, используемого в обнаружении.
- Убедитесь, что выбранный датчик ИК-близости не излучает критические длины волн, которые могут помешать поведению выбранных видов, управляемой светом. Убедитесь, что длины волн, испускаемые датчиком ниже 800 нм, не присутствуют на расстояниях более 5 мм от ИК-источника датчика, измеряемых спектрометром.
- Распределите функции эксперимента по набору роботов, чтобы каждый робот мог автономно управлять частями, которые проходят в своей собственной местности. Организуйте предоставление роботами световых стимулов и возможностей зондирования в соответствии с соответствующими направлениями роста растений, которые тестируются.
- Составьте каждого робота вокруг однобортного компьютера, который беспроводной локальной сети (WLAN) включен. Интерфейс компьютера к датчикам и приводам с помощью пользовательской печатной платы (PCB). Мощность каждого робота индивидуально, с собственной резервной батареей.
- Включите один датчик ИК-близости в направлении, проверяемом для приближающихся растений, в соответствии с вышеуказанными требованиями.
- Включите достаточно светодиодов, чтобы доставить выше требования синего света, в направлении, проверяемых для приближающихся растений.
- При использовании светодиодов RGB, а не синих светодиодов, опционально включить испуг из красного диода, когда синий диод не используется, чтобы увеличить красный свет доставки описано ниже (для здоровья растений через поддержку фотосинтеза).
- Если красный свет излучается от роботов через определенные промежутки времени, то используйте красные диоды с пиковым излучением примерно на 625-650 нм, без критических длин волн, перекрывающих зеленую полосу (т.е. ниже 550 нм) или дальнюю красную полосу (т.е. выше 700 нм).
- Не позволяйте красным диодам производить уровень тепла выше, чем у синих диодов.
- Включите аппаратное обеспечение, которое позволяет локальные сигналы между роботами. Включите фоторезистор (т.е. светозависимый резистор или ЛДР) для каждого направления соседнего робота для мониторинга состояния легких излмиссий. Кроме того, сообщите о состоянии местных соседей через WLAN.
- Включите оборудование для рассеиваемего тепла, как того требуют условия выбранных синих диодов и использованного корпуса робота. Выполняйте сочетание алюминиевых теплоотводов, вентиляционных отверстий в корпусе корпуса для корпуса робота и вентиляторов. Активируйте вентиляторы с помощью цифрового датчика температуры на однобортном компьютере или дополнительном ПХБ.
- Организуйте компоненты робота таким образом, чтобы соответствующие направления равномерно обслуживались.
- Расположите синие диоды, чтобы распределить эквивалентную интенсивность света по каждому из направлений, с которых могут приближаться растения (т.е. от механических опор, прикрепленных к нижней половине робота, см. шаг 2.5). Ориентируйтесь на каждый диод в корпусе робота так, что центральная ось его угла объектива находится в пределах 60 градусов от каждой оси механической поддержки, которую он обслуживает, и расположите его, чтобы не быть заблокированным корпусом робота.
- Позиция ИК-датчиков близости эквивалентно для их соответствующих приближающихся направлений роста (т.е. от механических опор, прикрепленных к нижней половине робота, см. шаг 2.5). Расположите каждый датчик ИК-близости в пределах 1 см от точки крепления между роботом и механической поддержкой, и ориентируйте его таким образом, чтобы его угол обзора был параллельным оси поддержки. Убедитесь, что его излучатель и приемник не заблокированы корпусом робота.
- Позиция любых фоторезисторов для локальной связи эквивалентно для каждого направления, обращенного к соседнему роботу в установке (т.е. от всех механических опор, прикрепленных к роботу, см. 2.5). Ориентируйтесь на каждый фоторезистор так, что центральная ось его угла обзора находится в пределах 45 "от оси поддержки, которую он обслуживает, и положение, чтобы не быть заблокированным корпусом робота.
- Соберите все компоненты с однобортным компьютером (обратитесь к диаграмме блока на рисунке 2). Убедитесь, что компьютер может быть легко доступен для обслуживания после сборки.
- Интерфейс светодиодов для компьютера через светодиодные драйверы с помощью модуляции ширины импульса. Используйте фиксированное механическое соединение между светодиодами и либо корпусом, либо теплоотводом, а также используйте механически неограниченное соединение между светодиодами и компьютером.
- Вентиляторы интерфейса к компьютеру с помощью линейного регулятора (т.е. переключателя) с помощью ввода общего назначения/вывода заголовка pin.s. Вентиляторы Affix, где доступен адекватный воздушный поток, при этом не обеспечивает механического напряжения на них.
- Интерфейс ИК-датчиков близости и фоторезисторов с помощью аналогового цифрового конвертера, используя серийный периферийный интерфейс. Используйте фиксированное механическое соединение от датчиков к корпусу и механически неограниченное соединение с компьютером.
- Изготовление робота случае из термостойкого пластика с использованием либо селективного лазерного спекания, стереолитографии, сросшиеся осаждения моделирования, или инъекционных литья.
- Интегрируйте роботов в набор модульных механических опор, которые вдвойне удерживают роботов в положении и служат альпинистскими эшафотами для растений, ограничивая вероятные средние траектории роста растений. Дизайн роботов, чтобы служить в качестве дополнительных механических соединений между опорами, расположены таким образом, что они пересекаются траектории роста растений.
- Свести к минимуму размер робота, и убедитесь, что он может быть надежно превзошел неподдерживаемый растущий кончик выбранного вида растений. Уменьшить размер робота в максимально возможной степени, чтобы увеличить скорость эксперимента.
- Форма внешних стен тела робота, чтобы быть ненавязчивым для роста растений, как это возможно, когда растущий кончик постепенно перемещается вокруг робота. Круглый или грань тела робота, чтобы не блокировать траекторию сугробов в twining видов растений. Исключите острые выступы и острые отступы.
- Выберите материал и профиль (т.е. форму поперечного сечения) для механических опор, чтобы выбранные виды растений могли эффективно подниматься на него, например, деревянный стержень с круглым профилем диаметром около 8 мм или меньше. Убедитесь, что механические опоры достаточно жесткой, чтобы поддержать растения и роботов в рамках установки, дополнены прозрачным акриловым листом за установкой.
- На каждом роботе включаются точки крепления для крепления указанных механических опор. Включите один для каждого направления, по которому растение может приблизиться или отойти от робота.
- Для каждой точки крепления, включите розетку в корпусе робота, с размерами, соответствующими поперечному сечению вспомогательного материала.
- Установите розетку с глубиной не менее 1 см. Держите розетку достаточно мелкой, чтобы поддержка не сталкиваться с компонентами внутри робота.
- Упорядочить механические опоры в регулярно сетки картины, равномерно диагональ юга с углом наклона на 45 "или круче. Сделайте длину опор равномерной. Минимальная длина опоры составляет 30 см, что позволяет достаточно места для альпинистских растений прикрепить после изучения области в их неподдерживаемом состоянии. Предпочтительная длина подвергается 40 см или более, чтобы позволить некоторый буфер для статистически крайних случаях крепления растений.
- Соберите механические элементы с роботами. Следующий протокол предполагает обнажённый радиус поддержки 40 см и установку восьми роботов в четыре ряда (см. рисунок6). Для других размеров масштабируйте соответственно.
- На поверхности пола постройте стойку шириной 125 см, способную удерживать установку в вертикальном положении.
- Прикрепите к подставке лист 125 см х 180 см (толщиной 8 мм и более) прозрачного акрила, который стоит вертикально.
- Позиция горшки с соответствующей почвой на стенде, против акрилового листа.
- Прикрепите два механических y-соединения к акриловому листу, на 10 см выше горшков. Расположите суставы на 45 см и 165 см вправо, соответственно, от левого края стенда.
- Прикрепите две опоры слева от сустава, опираясь на 45 "влево и вправо, и прикрепите одну опору вправо у-соединения, опираясь 45" влево.
- Прикрепите двух роботов к акриловому листу и вставьте концы ранее размещенных опор в розетки в корпусах роботов. Расположите роботов на 35 см выше y-соединений и 10 см и 80 см вправо, соответственно, левого края стенда.
- Повторите шаблон, чтобы прикрепить оставшихся роботов и поддержку в по диагонали сетки шаблон (см. Рисунок 6), так что каждый ряд роботов на 35 см выше предыдущей строки, и каждый робот горизонтально расположен непосредственно над роботом или у-совместный, что есть два ряда под ним.
3. Робот программное обеспечение
- Установите операционную систему (например, Raspbian) на однобортные компьютеры роботов.
- Во время каждого эксперимента параллельно запускайте программный протокол на каждом роботе, что позволяет им распространять автономное поведение (см. Wahby et al.14,для псевдокода и более подробной информации).
- Установить два возможных состояния для робота: одно является стимулом состояние, в течение которого робот излучает синий свет при интенсивности, описанной выше; другой является спящим состоянием, в течение которого робот либо излучает свет, либо излучает красный свет, как описано выше.
- В состоянии стимула, отправить импульс ширины модуляции (PWM) сигнал через однобортный компьютер с частотой, соответствующей требуемой яркости синих драйверов светодиодов.
- В спящем состоянии, вызвать не светодиоды, или при необходимости отправить сигнал PWM только красные драйверы светодиодов.
- В контрольных экспериментах назначайте всем роботам спящее состояние.
- В экспериментах с одним решением назначаем одному роботу спящее состояние и одного робота состояние стимула.
- В экспериментах с несколькими решениями начните процесс инициализации следующим образом.
- Поставка каждому роботу полной конфигурации карты роста растений, которые будут протестированы в текущем эксперименте.
- Установите местоположение робота в шаблоне, либо автоматически используя датчики локализации, либо вручную.
- Сравните местоположение робота с предоставленной картой. Если местоположение робота является первым местом на карте, установите робота для стимулирования; в противном случае, установить робота в спящемрежиме . Процесс инициализации заканчивается.
- В экспериментах с несколькими решениями начните процесс Управления следующим образом. Выполнить итеративно.
- Проверьте показания датчика ИК-близости робота, чтобы увидеть, если растение было обнаружено.
- Если растение обнаружено и робот настроен на спящийрежим, а затем поддерживать.
- Если растение обнаружено и робот настроен на стимул, то:
- Сообщите соседним соседним роботам, что растение было обнаружено, и включите местоположение робота в сообщение.
- Установите робота в спящийрежим.
- Сравните местоположение робота с картой. Если робот находится в последнем месте на карте, то отправьте сигнал через WLAN, что эксперимент завершен.
- Проверьте входящие сообщения робота от соседних роботов, чтобы увидеть, если один из них, который был установлен на стимул обнаружил завод.
- Если сосед-стимул обнаружил растение, сравните местоположение этого соседа с местоположением робота, а также сравните с картой.
- Если робот находится в последующем месте на карте, установите робота для стимулирования.
- Прекратите итеративный цикл процесса Управления после получения сигнала о завершении эксперимента.
4. Процедура мониторинга и технического обслуживания работы растений
- Найдите установку эксперимента в контролируемых условиях окружающей среды, в частности, в помещении без дневного света без происшествий или другого света, прикрытого для условий, описанных ниже, с контролируемой температурой воздуха и влажностью, а также с контролируемым поливом почвы. Мониторинг условий с помощью датчиков, подключенных к микроконтроллеру или однобортному компьютеру, который включен WLAN.
- Поддерживайте фотосинтез растений с помощью светодиодных ламп роста, внешних для роботов и стоящих перед экспериментом установки.
- Используйте лампы роста, чтобы доставить монохромный красный свет на установку, с красными диодами, имеющими пиковое излучение примерно на 625-650 нм, без критических длин волн за пределами диапазона 550-700 нм, за исключением низкой частоты окружающего синего света, если для здоровья выбранных видов. Если низкая частота эмбиента синего света включена, ограничьте уровни на очень незначительной части излучаемых одним роботом.
- Обеспечить уровни красного света, необходимые для здоровья выбранных видов, как правило, примерно 2000 люменов или более в общей сложности.
- Ориентируйте лампы роста для того чтобы смотреть на установку эксперимента, так но что их излучение распределено грубо ровно над зоной роста.
- Мониторинг условий окружающего освещения с помощью датчика цвета RGB.
- После прорастения, обеспечить каждому растению свой собственный горшок в основании эксперимента установки. Обеспечить подходящий объем почвы и тип для выбранных видов. Убедитесь, что почва и семена были дезинфицированы до прорастания. Используйте подходящие методы борьбы с вредителями для предотвращения или управления насекомыми, если присутствует.
- Регулируйте температуру воздуха и влажность, соответственно для выбранных видов, используя обогреватели, кондиционеры, увлажнители и обезвоживания. Мониторинг уровней с помощью датчика температурного давления и влажности.
- Мониторинг почвы с помощью датчика влажности почвы. Поддержание соответствующей скорости полива для выбранных видов. Выполняйте с помощью автоматизированной системы полива, где вода доставляется в почву через сопла, как это вызвано показаниями датчика влажности почвы, или воды почвы вручную, как регулируется показаниями датчика.
5. Экспериментальная конструкция
- Поместите роботов и механические опоры в сетку достаточно большой, чтобы покрыть область роста и шаблон, тестируемый в эксперименте, не меньше одного ряда и двух колонн роботов.
- Ниже нижнего ряда роботов поместите ряд стандартных диагональных механических опор, соответствующих тем, которые вся установка. Там, где нижние концы этих опор пересекаются, присоединяйтесь к ним механически с 'y-соединением'. Для каждого 'y-совместного' в основании установки, посадить равномерное количество растений в зависимости от размера диагональной ячейки сетки (примерно одно растение на 10 см открытой механической длины поддержки), с условиями поддержания здоровья растений описано выше.
- Выберите тип эксперимента для запуска, и где соответствующие выбрать количество и распределение роботов.
-
Тип эксперимента 1: Контроль
ПРИМЕЧАНИЕ: Этот тип эксперимента тестирует рост альпинистских растений в условиях отсутствия легких стимулов, чтобы вызвать фототропизм. Он может работать на любом размере и форме установки.- Назначайте всем роботам спящее состояние (см. шаг 3.4) и непрерывно запускайте до тех пор, пока результаты не будут оценены вручную, чтобы быть полными.
- Обратите внимание, прикрепляются ли растения к механическим опорам. В успешном эксперименте ни одно из растений не найдет и не прикрепится к механическим опорам.
-
Тип эксперимента 2: Одноместное решение
ПРИМЕЧАНИЕ: Этот тип эксперимента тестирует траектории роста растений, когда представлены с бинарными опционами – одна поддержка, ведущая к спящему роботу и одна поддержка, ведущая к роботу-стимулу. Он работает только на минимальной установке (т.е. один ряд, две колонки).- Назначайте одному роботу спящее состояние (см. 3.5) и одного робота состояние стимула. Выполнить непрерывно, пока один из двух роботов обнаруживает завод с датчиком ИК-близости.
- Наблюдайте привязанность завода к механической поддержке, рост вдоль поддержки, и показания датчика робота стимула. В успешном эксперименте, робот с состоянием стимула обнаружит завод после того как он вырос вдоль соответственно поддержки.
-
Тип эксперимента 3: Многократное решение
ПРИМЕЧАНИЕ: Этот тип эксперимента проверяет рост растений, когда представлены с несколькими последующими условиями стимулов, которые вызывают ряд решений в соответствии с заранее определенной глобальной карте. Он может работать на любом размере и форме установки, которая имеет больше, чем минимальное количество строк (т.е. два или более).- Предоставьте роботам глобальную карту шаблона, который необходимо вырастить (см. шаги 3.6-3.7)...
- Наблюдайте за событиями крепления растения и характером роста вдоль механических опор.
- В успешном эксперименте, по крайней мере одно растение будет выросло на каждой поддержке, присутствуют на глобальной карте.
- Кроме того, в успешном эксперименте ни один завод не выберет неправильное направление, когда его растущая кончик находится в настоящее время активной точке принятия решений.
- Не учитывайте посторонние советы по выращиванию здесь, если, например, событие ветвления помещает новый растущий совет в устаревшем месте на карте.
-
Тип эксперимента 1: Контроль
6. Процедура регистрации
- Хранение данных с датчиков и камер первоначально на однобортном компьютере, где данные были созданы на борту. Выполнить бортовые серверы ответов, которые отвечают на необходимые запросы, такие как последнее чтение сохраненных датчиков. Регулярно загружайте данные и файлы журнала через WLAN на локальное устройство хранения данных (NAS).
- Захват замедленного видео экспериментов непрерывно с помощью камер, расположенных в двух или более точек зрения, по крайней мере один вид камеры, охватывающих полную установку эксперимента. Убедитесь, что захваченные изображения имеют достаточно высокое разрешение, чтобы адекватно захватить движения растений, растущих кончиков, как правило, только несколько миллиметров в ширину.
- Автоматизировать процесс захвата изображения, чтобы обеспечить согласованные временные интервалы между захватами, используя бортовую камеру на однобортном компьютере или автономную цифровую камеру, которая автоматизируется с помощью интервалометра. Установите лампы, чтобы выступать в качестве вспышек, автоматизированных аналогично камерам. Убедитесь, что вспышки достаточно яркие, чтобы конкурировать с красным светом ламп роста без резкого пост-обработки изображений для коррекции цвета.
- Найдите вспышки так, что установка эксперимента может быть полностью освещена и, следовательно, хорошо видна на изображениях. Синхронизируйте камеры и вспышки так, что все камеры захватывают изображения одновременно, в течение 2 с флэш-периода. Захват изображения каждые 2 минуты, в течение каждого эксперимента.
- Зарегистрируй данные датчика окружающей среды, в частности показания датчика влажности температуры давления, датчика цвета RGB и датчика влажности почвы. Зарегистрируй данные всех роботов в установке, в частности, датчик АК-близости и показания фоторезистора, а также внутреннее состояние робота, который определяет его состояние светодиодных излучений.
- Сделать все записанные данные доступными для дистанционного мониторинга экспериментов, с помощью регулярных отчетов в режиме реального времени, чтобы обеспечить правильные условия сохраняются в течение всего эксперимента продолжительностью до нескольких месяцев.
Результаты
Управление: Поведение растений без роботизированных стимулов.
Из-за отсутствия синего света (т.е. все роботы находятся в состоянии покоя),положительный фототропизм не срабатывает на заводе. Таким образом, растения показывают объективный рост вверх, как они следуют гравитропизм. Они также отображают типичное кужение (т.е. обмотки), см. Рисунок 4A. Как и ожидалось, заводы не могут найти механическую поддержку, ведущую к спящим роботам. Растения разрушаются, когда они больше не могут поддерживать свой собственный вес. Мы останавливаем эксперименты, когда по крайней мере два растения краха, см. Рисунок 4B, C.
Одноместные или множественные решения: Поведение завода с роботизированными стимулами
В четырех экспериментах с одним решением, два запуска имеют левое рулевое управление (т.е. робот слева от бифуркации активируется для стимулирования), и два запуска имеют правое рулевое управление. Стимул роботы успешно направить растения к правильной поддержке, см. Рисунок 5. Ближайшее растение со стеблем угол наиболее похож на правильный опоры придает в первую очередь. В каждом эксперименте, по крайней мере одно растение прикрепляется к опоре и поднимается на нее, пока не достигнет робота стимула и тем самым завершит эксперимент. В одном эксперименте, второе растение прикрепляется к правильной опоре. Остальные заводы могут прикрепить также в более длинних продолжительностях эксперимента. Ни один из растений не придает неправильной поддержки. Каждый эксперимент длится в среднем 13 дней.
В двух многоразовых экспериментах растения вырастают в предопределенный зигзагообразный узор, см. Рисунок 6А. Каждый эксперимент длится около семи недель. В начале эксперимента робот устанавливает свой статус стимулом (см. 3.6.3) и направляет растения к правильной поддержке в соответствии с оговоренным шаблоном. Завод прикрепляет и поднимает его, прибывая на активированный робот стимула поэтому завершает первое решение. Согласно 3.7.3, текущий робот стимула затем становится спящим и уведомляет своих соседей. Спящий сосед, следующий по зигзагообразной схеме, переключается на стимул (см. 3.7.6). Если растение обнаружено спящим роботом, этот робот не реагирует (см. 3.7.2). Заводы продолжают и завершают остальные 3 решения успешно. Таким образом, предопределенный зигзагообразный рисунок полностью выращен, см. Рисунок 6B.
Все данные эксперимента, а также видео доступны в Интернете24.

Рисунок 1. Неподвижный робот и его основные компоненты. Рисунок, перепечатанный из авторского издания Wahby et al.14, используется с лицензией Creative Commons CC-BY 4.0 (см. дополнительные файлы), с изменениями, разрешенными лицензией. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}

Рисунок 2. Диаграмма компонента неподвижной роботизированной электроники. Светодиодные драйверы IRLML2060 взаимодействуют с однобортным компьютером робота (например, Raspberry Pi) с помощью PWM для управления яркостью светодиодов. Переключатель LP5907 взаимодействует с однобортным компьютером через общий входный/выходный (GPIO) заголовок для управления вентилятором. Аналог MCP3008 аналог цифрового преобразователя (ADC) взаимодействует с однобортным компьютером через серийный периферийный интерфейс (SPI) для чтения аналоговых данных датчика ИК и светозависимого резистора (LDR). Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}

Рисунок 3. Вскоре после '03.04.16,' наконечник завода поднимается опоры и прибывает в поле зрения робота. (A) Образец ИК-датчик близости масштабируется показания напряжения (вертикальная ось) во время эксперимента. Более высокие значения указывают на обнаружение кончиков растений. (B) Датчик ИК-близости находится и ориентирован в соответствии с креплением поддержки, чтобы обеспечить эффективное обнаружение кончиков растений. Рисунок, перепечатанный из авторского издания Wahby et al.14, используется с лицензией Creative Commons CC-BY 4.0 (см. дополнительные файлы), с изменениями, разрешенными лицензией. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}

Рисунок 4. В результате контрольных экспериментов были показаны кадры, показывающие, что все четыре растения не прикреплялись ни к какой опоре при отсутствии синего света. (A) После пяти дней, все растения растут вверх в одном из контрольных экспериментов (см. (C) для более позднего состояния роста). (B) После 15 дней, три растения рухнули, и один по-прежнему растет вверх в первом эксперименте контроля. (C) После семи дней, два растения рухнули, и два по-прежнему растет вверх во втором эксперименте контроля (см. (A) для предыдущего состояния роста). Рисунок, перепечатанный из авторского издания Wahby et al.14, используется с лицензией Creative Commons CC-BY 4.0 (см. дополнительные файлы), с изменениями, разрешенными лицензией. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}

Рисунок 5. Однорешение экспериментов результат кадры, показывающие способность стимул робота направить растения через двоичное решение, чтобы подняться на правильную поддержку. Во всех четырех экспериментах, один робот установлен на стимул, а другой в спящийрежим - на двух противоположных сторонах перекрестка. На кадрах видно расположение растений прямо перед тем, как робот-стимул обнаруживает их. В каждом эксперименте хотя бы одно растение прикрепляется к правильной опоре, и ни одно растение не прикрепляется к неправильному. Кроме того, неподдерживаемые растения показывают рост предвзятого к стимулом робота. E, F,G, H являются крупными планомaups A, B, C, D соответственно. Рисунок, перепечатанный из авторского издания Wahby et al.14, используется с лицензией Creative Commons CC-BY 4.0 (см. дополнительные файлы), с изменениями, разрешенными лицензией. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}

Рисунок 6. Эксперимент с несколькими решениями. (A) Целевой зигзагообразный рисунок выделен зеленым цветом на карте. (B) Последний кадр из эксперимента (после 40 дней), показывая положение растений до последнего робота стимул на шаблон обнаруживает их. Роботы успешно выращивают зигзагообразный узор. Рисунок, перепечатанный из авторского издания Wahby et al.14, используется с лицензией Creative Commons CC-BY 4.0 (см. дополнительные файлы), с изменениями, разрешенными лицензией. Пожалуйста, нажмите здесь, чтобы просмотреть большую версию этой цифры.
{kind=link}
Обсуждение
Представленная методология показывает первые шаги к автоматизации стимулов управляемого рулевого управления роста растений, для создания конкретных моделей. Это требует постоянного поддержания здоровья растений, сочетая в одном эксперименте установку различных сфер биохимических реакций роста и инженерии мехатронных функций зондирования, связи и контролируемого поколения стимулов. Поскольку наше внимание здесь сосредоточено на альпинистских растениях, механическая поддержка также является неотъемлемой частью. Ограничениетекущей текущей установки является ее масштабом, но мы считаем, что наша методология легко масштабируется. Механические эшафот может быть расширен для больших установк и, следовательно, более длительные периоды роста, что также позволяет расширенные конфигурации и узоры. Здесь установка ограничена двумя измерениями и бинарными лево-правыми решениями, так как рост ограничен сеткой механических опор на 45 градусов, а позиции растительных решений ограничиваются бифуркациями этой сетки. Механические расширения могут включать 3D леса и различные материалы, чтобы обеспечить сложные формы9,19. Методологию можно считать системой для автоматического роста шаблонов, определенных пользователем. Расширяя возможную сложность механических конфигураций, пользователи должны столкнуться с некоторыми ограничениями на желаемые шаблоны. Для такого приложения, пользовательский программный инструмент должен подтвердить, что шаблон является выражаемым, и мехатроника должна затем самоорганизовать производство шаблона, генерируя соответствующие стимулы для управления растениями. Программное обеспечение также должно быть расширено, чтобы включить планы восстановления и политики, определяющие, как продолжить рост, если первоначальная запланированная схема частично не удалось, например, если первый активированный робот никогда не обнаружил завод, но спящие из них имеют видел, что положение растущих советы находятся за пределами активированного робота.
В представленной методологии примером видов растений, отвечающих критериям отбора протокола, является альпинистская фана P. vulgaris. Это вид, используемый в репрезентативных результатах. Поскольку P. vulgaris обладает сильным положительным фототропизмом для УФ-А и синего света, фототропины (светоприемные белки) в растении будут поглощать фотоны, соответствующие длинам волн 340-500 нм. Когда рецепторы срабатывают, первый отек будет происходить в стебле преференциальным перемещением воды в стволовые ткани, противостоящие срабатыванию рецепторов, вызывая обратимый направленный ответ. Затем, в пределах стебля, auxin (гормон узора растений) направляется в то же место ткани, увековечивая направленную реакцию и фиксации стволовых тканей, как они застыть. Такое поведение может быть использовано для формирования растений в этих контролируемых условиях в помещении, так как растения подвергаются воздействию только изолированных синий свет и изолированный красный свет, с инцидентом далеко-красный свет от Датчиков ИК-близости на достаточно низких уровнях, что он не мешает с такими поведениями, как ответ на избегание тени20,21. Реакция фототропизма на заводе реагирует в установке на свет от синих диодов с пиковым излучением 465 нм, а фотосинтез22,23 на заводе поддерживается красными диодами с пиковым излучением и максимумом 650 нм. P. vulgaris растет до нескольких метров в высоту подходит в общей установке, как примерно 3 L коммерческого садоводства почвы, необходимых в горшок соответствует установке масштаба.
Хотя текущая установка фокусируется на свете в качестве стимула притяжения, дополнительные стимулы могут быть актуальны для других типов экспериментов. Если желаемая модель требует разделения между различными группами растений (например, желаемая модель нуждается в двух группах растений, чтобы выбрать противоположные стороны), то это не может быть осуществимо, используя только один тип стимула. Для таких сложных моделей роста, независимо от формы эшафота, различные группы растений потенциально могут быть выращены в разные периоды времени, так что их соответствующие стимулы притяжения не мешают, что также позволит интеграции ветвления События. Тем не менее, это не всегда может быть подходящим решением, и стандартный привлекательный свет стимул может быть дополнен ажиотажных влияний, таких как затенение, или другими стимулами, как фар-красный свет или вибрации двигателей9,14.
Представленный метод и дизайн эксперимента являются лишь первым первым шагом на пути к сложной методологии автоматического влияния направленного роста растений. Эксперимент установки является основным, определяя только последовательность бинарных решений в растениях, и мы сосредоточены на одном, легко управлять стимулом. Потребуются дополнительные исследования, чтобы доказать статистическую значимость метода, добавить больше стимулов и контролировать другие процессы, такие как ветвление. При достаточном развитии, чтобы гарантировать долгосрочную надежность роботов, представленная методология может позволить автоматизацию экспериментов завода в течение длительных периодов времени, уменьшая накладные расходы, связанные с изучением стадий разработки растений за пределами, что побеги. Аналогичные методы могут позволить в будущем проводить исследования недостаточно изученной динамики между биологическими организмами и автономными роботами, когда они действуют как тесно связанные с ними био-гибридные системы.
Раскрытие информации
Авторы заявляют, что у них нет конкурирующих финансовых интересов.
Благодарности
Это исследование было поддержано проектом flora robotica, который получил финансирование от научно-исследовательской и инновационной программы Европейского союза Horizon 2020 в рамках грантового соглашения FET, No 640959. Авторы благодарят Анастасиоса Гетсопулоса и Эвальда Нойфельда за их вклад в сборку оборудования, и Таню Катарину Кайзер за ее вклад в мониторинг экспериментов на заводе.
Материалы
| Name | Company | Catalog Number | Comments |
| 3D printed case | Shapeways, Inc | n/a | Customized product, https://www.shapeways.com/ |
| 3D printed joints | n/a | n/a | Produced by authors |
| Adafruit BME280 I2C or SPI Temperature Humidity Pressure Sensor | Adafruit | 2652 | |
| Arduino Uno Rev 3 | Arduino | A000066 | |
| CdS photoconductive cells | Lida Optical & Electronic Co., Ltd | GL5528 | |
| Cybertronica PCB | Cybertronica Research | n/a | Customized product, http://www.cybertronica.de.com/download/D2_node_module_v01_appNote16.pdf |
| DC Brushless Blower Fan | Sunonwealth Electric Machine Industry Co., Ltd. | UB5U3-700 | |
| Digital temperature sensor | Maxim Integrated | DS18B20 | |
| High Power (800 mA) EPILED - Far Red / Infra Red (740-745 nm) | Future Eden Ltd. | n/a | |
| I2C Soil Moisture Sensor | Catnip Electronics | v2.7.5 | |
| IR-proximity sensors (4-30 cm) | Sharp Electronics | GP2Y0A41SK0 | |
| LED flashlight (50 W) | Inter-Union Technohandel GmbH | 103J50 | |
| LED Red Blue Hanging Light for Indoor Plant (45 W) | Erligpowht | B00S2DPYQM | |
| Low-voltage submersible pump 600 l/h (6 m rise) | Peter Barwig Wasserversorgung | 444 | |
| Medium density fibreboard | n/a | n/a | For stand |
| Micro-Spectrometer (Hamamatsu) on an Arduino-compatible breakout board | Pure Engineering LLC | C12666MA | |
| Pixie - 3W Chainable Smart LED Pixel | Adafruit | 2741 | |
| Pots (3.5 l holding capacity, 15.5 cm in height) | n/a | n/a | |
| Power supplies (5 V, 10 A) | Adafruit | 658 | |
| Raspberry Pi 3 Model B | Raspberry Pi Foundation | 3B | |
| Raspberry Pi Camera Module V2 | Raspberry Pi Foundation | V2 | |
| Raspberry Pi Zero | Raspberry Pi Foundation | Zero | |
| RGB Color Sensor with IR filter and White LED - TCS34725 | Adafruit | 1334 | |
| Sowing and herb soil | Gardol | n/a | |
| String bean | SPERLI GmbH | 402308 | |
| Transparent acrylic 5 mm sheet | n/a | n/a | For supplemental structural support |
| Wooden rods (birch wood), painted black, 5 mm diameter | n/a | n/a | For plants to climb |
Ссылки
- Åstrand, B., Baerveldt, A. J. An agricultural mobile robot with vision-based perception for mechanical weed control. Autonomous Robots. 13 (1), 21-35 (2002).
- Blackmore, B. S. A systems view of agricultural robots. Proceedings of 6th European conference on precision agriculture (ECPA). , 23-31 (2007).
- Edan, Y., Han, S., Kondo, N. Automation in agriculture. Springer handbook of automation. , Springer. Berlin, Heidelberg. 1095-1128 (2009).
- Van Henten, E. J., et al. An autonomous robot for harvesting cucumbers in greenhouses. Autonomous Robots. 13 (3), 241-258 (2002).
- Al-Beeshi, B., Al-Mesbah, B., Al-Dosari, S., El-Abd, M. iplant: The greenhouse robot. Proceedings of IEEE 28th Canadian Conference on Electrical and Computer Engineering (CCECE). , 1489-1494 (2015).
- Giraldo, J. P., et al. Plant nanobionics approach to augment photosynthesis and biochemical sensing. Nature Materials. 13 (4), (2014).
- Mazarei, M., Teplova, I., Hajimorad, M. R., Stewart, C. N. Pathogen phytosensing: Plants to report plant pathogens. Sensors. 8 (4), 2628-2641 (2008).
- Zimmermann, M. R., Mithöfer, A., Will, T., Felle, H. H., Furch, A. C. Herbivore-triggered electrophysiological reactions: candidates for systemic signals in higher plants and the challenge of their identification. Plant Physiology. , 01736(2016).
- Hamann, H., et al. Flora robotica--An Architectural System Combining Living Natural Plants and Distributed Robots. , arXiv preprint arXiv. 1709.04291 (2017).
- Arkin, R. C., Egerstedt, M. Temporal heterogeneity and the value of slowness in robotic systems. Proceedings of IEEE International Conference on Robotics and Biomimetics (ROBIO). , 1000-1005 (2015).
- Mahlein, A. K. Plant disease detection by imaging sensors-parallels and specific demands for precision agriculture and plant phenotyping). Plant Disease. 100 (2), 241-251 (2016).
- Wahby, M., et al. A robot to shape your natural plant: the machine learning approach to model and control bio-hybrid systems. Proceedings of the Genetic and Evolutionary Computation Conference (GECCO '18). , ACM. New York, NY, USA. 165-172 (2018).
- Bastien, R., Douady, S., Moulia, B. A unified model of shoot tropism in plants: photo-, gravi-and propio-ception. PLoS Computational Biology. 11 (2), e1004037(2015).
- Wahby, M., et al. Autonomously shaping natural climbing plants: a bio-hybrid approach. Royal Society Open Science. 5 (10), 180296(2018).
- Liscum, E., et al. Phototropism: growing towards an understanding of plant movement. Plant Cell. 26, 38-55 (2014).
- Christie, J. M., Murphy, A. S. Shoot phototropism in higher plants: new light through old concepts. American Journal of Botany. 100, 35-46 (2013).
- Migliaccio, F., Tassone, P., Fortunati, A. Circumnutation as an autonomous root movement in plants. American Journal of Botany. 100, 4-13 (2013).
- Gianoli, E. The behavioural ecology of climbing plants. AoB Plants. 7, (2015).
- Vestartas, P., et al. Design Tools and Workflows for Braided Structures. Proceedings of Humanizing Digital Reality. , Springer. Singapore. 671-681 (2018).
- Pierik, R., De Wit, M. Shade avoidance: phytochrome signalling and other aboveground neighbour detection cues. Journal of Experimental Botany. 65 (10), 2815-2824 (2014).
- Fraser, D. P., Hayes, S., Franklin, K. A. Photoreceptor crosstalk in shade avoidance. Current Opinion in Plant Biology. 33, 1-7 (2016).
- Hogewoning, S. W., et al. Photosynthetic Quantum Yield Dynamics: From Photosystems to Leaves. The Plant Cell. 24 (5), 1921-1935 (2012).
- McCree, K. J. The action spectrum, absorptance and quantum yield of photosynthesis in crop plants. Agricultural Meteorology. 9, 191-216 (1971).
- Wahby, M., et al. Autonomously shaping natural climbing plants: a bio-hybrid approach [Dataset]. , Available from: https://doi.org/10.5281/zenodo.1172160 (2018).
Перепечатки и разрешения
Запросить разрешение на использование текста или рисунков этого JoVE статьи
Запросить разрешениеСмотреть дополнительные статьи
This article has been published
Video Coming Soon
Авторские права © 2025 MyJoVE Corporation. Все права защищены