
Method Article
Robotic Sensing und Stimuli-Regelung für geführtes Pflanzenwachstum
In diesem Artikel
Zusammenfassung
Verteilte Roboterknoten liefern Sequenzen von Blaulichtreizen, um die Wachstumspfade von Kletterpflanzen zu steuern. Durch die Aktivierung des natürlichen Phototropismus führen die Roboter die Pflanzen durch binäre Links-Rechts-Entscheidungen und wachsen sie zu vordefinierten Mustern, die im Gegensatz dazu nicht möglich sind, wenn die Roboter schlummern.
Zusammenfassung
Robotersysteme werden aktiv für die Manipulation natürlicher Pflanzen erforscht, die in der Regel auf landwirtschaftliche Automatisierungsaktivitäten wie Ernte, Bewässerung und mechanische Unkrautbekämpfung beschränkt sind. Um diese Forschung zu erweitern, führen wir hier eine neue Methode ein, um das Richtungswachstum von Pflanzen über ihre natürlichen Mechanismen zur Signalisierung und Hormonverteilung zu manipulieren. Eine effektive Methodik der Bereitstellung von Roboterreizen kann Möglichkeiten für neue Experimente mit späteren Entwicklungsphasen in Pflanzen oder für neue biotechnologische Anwendungen wie das Formen von Anlagen für grüne Wände eröffnen. Die Interaktion mit Pflanzen stellt mehrere Robotik-Herausforderungen dar, darunter die Kurzstreckenerfassung kleiner und variabler Pflanzenorgane und die kontrollierte Betätigung von Pflanzenreaktionen, die zusätzlich zu den bereitgestellten Reizen von der Umwelt beeinflusst werden. Um das Pflanzenwachstum zu steuern, entwickeln wir eine Gruppe von unbeweglichen Robotern mit Sensoren, um die Nähe von Wachsenden Spitzen zu erkennen, und mit Dioden, um Lichtreize zu liefern, die Phototropismus bewirken. Die Roboter werden mit der Kletter-Common-Bohne, Phaseolus vulgaris, in Experimenten mit einer Dauer von bis zu fünf Wochen in einer kontrollierten Umgebung getestet. Mit Robotern, die sequenziell blaue Lichtspitzenemission bei Wellenlänge 465 nm-Pflanzenwachstum emittieren, wird das Wachstum erfolgreich durch aufeinander folgende binäre Entscheidungen entlang mechanischer Stützen gesteuert, um Zielpositionen zu erreichen. Wachstumsmuster werden in einem Biszusen bis zu 180 cm Höhe getestet, wobei Pflanzenstämme über einen Zeitraum von etwa sieben Wochen bis zu ca. 250 cm in kumulativer Länge gewachsen sind. Die Roboter koordinieren sich und arbeiten völlig autonom. Sie erkennen sich nähernde Anlagenspitzen über Infrarot-Näherungssensoren und kommunizieren per Funk, um bei Bedarf zwischen Blaulichtreizen und Ruhezustand zu wechseln. Insgesamt unterstützen die erhaltenen Ergebnisse die Wirksamkeit der Kombination von Roboter- und Pflanzenexperimentmethoden für die Untersuchung potenziell komplexer Wechselwirkungen zwischen natürlichen und technisch hergestellten autonomen Systemen.
Einleitung
Kongruent mit der zunehmenden Verbreitung der Automatisierung in der Herstellung und Produktion, Roboter werden verwendet, um Pflanzen zu säen, zu behandeln und zu ernten1,2,3,4,5. Wir nutzen Robotertechnologie, um Pflanzenexperimente nicht-invasiv zu automatisieren, mit dem Ziel, das Wachstum über gerichtete Reaktionen auf Reize zu steuern. Traditionelle Gartenarbeit umfasste die manuelle Umformung von Bäumen und Sträuchern durch mechanische Zurückhaltung und Schneiden. Wir stellen eine Methodik vor, die beispielsweise auf diese Gestaltungsaufgabe angewendet werden kann, indem wir Wachstumsmuster mit Reizen steuern. Unsere vorgestellte Methodik ist auch ein Schritt hin zu automatisierten Pflanzenexperimenten, hier mit einem besonderen Fokus auf die Bereitstellung von Lichtreizen. Sobald die Technologie robust und zuverlässig geworden ist, hat dieser Ansatz das Potenzial, die Kosten in Pflanzenexperimenten zu senken und neue automatisierte Experimente zu ermöglichen, die sonst aufgrund von Zeitaufwand und manueller Arbeit nicht machbar wären. Die Roboterelemente sind frei programmierbar und wirken autonom, da sie mit Sensoren, Aktoren für die Reizversorgung und Mikroprozessoren ausgestattet sind. Während wir uns hier auf nähere Erfassung (d.h. Entfernungen aus nächster Nähe) und Lichtreize konzentrieren, sind viele andere Optionen möglich. Beispielsweise können Sensoren verwendet werden, um Pflanzenfarbe zu analysieren, biochemische Aktivität zu überwachen6, oder für phytosensing7 Ansätze, um zum Beispiel Umweltbedingungen durch Pflanzenelektrophysiologie8zu überwachen. In ähnlicher Weise können Aktuatoroptionen andere Arten von Reizen9, durch Vibrationsmotoren, Sprühgeräte, Heizungen, Lüfter, Schattierungsvorrichtungen oder Manipulatoren für gerichteten physischen Kontakt bieten. Zusätzliche Betätigungsstrategien könnten implementiert werden, um den Robotern eine langsame Mobilität zu ermöglichen (d. h. "langsame Bots"10), so dass sie die Position und Richtung, von der aus sie Anregungen liefern, schrittweise ändern könnten. Da die Roboter mit Einplatinencomputern ausgestattet sind, könnten sie außerdem anspruchsvollere Prozesse wie das Sehen für die Pflanzenphänotypisierung11 oder künstliche neuronale Netzwerkregler für die Reizbetätigung12ausführen. Da der Forschungsschwerpunkt pflanzenwissenschaftlich oft auf frühem Wachstum (d.h. in Trieben)13liegt, scheint der gesamte Bereich des Einsatzes autonomer Robotersysteme, um Pflanzen über längere Zeiträume zu beeinflussen, untererforscht und kann viele Zukunftschancen bieten. Noch einen Schritt weiter können die Roboterelemente als Forschungsobjekte selbst betrachtet werden, die es ermöglichen, die komplexe Dynamik von biohybriden Systemen, die von Robotern und Pflanzen gebildet werden, eng miteinander zu interagieren. Die Roboter setzen den Pflanzen gezielt Reize auf, die Pflanzen reagieren entsprechend ihrem adaptiven Verhalten und ändern ihr Wachstumsmuster, das die Roboter anschließend über ihre Sensoren erkennen. Unser Ansatz schließt die Verhaltensrückkopplungsschleife zwischen den Pflanzen und den Robotern und erzeugt eine hausostatische Regelschleife.
In unseren Experimenten, um die Funktion des Robotersystems zu testen, verwenden wir ausschließlich die Kletter-Common-Bohne, Phaseolus vulgaris. In diesem Setup verwenden wir Kletterpflanzen, mit mechanischen Stützen in einem gerasterten Gerüst von insgesamt 180 cm Höhe, so dass die Pflanzen durch Thigmotropismus beeinflusst werden und eine begrenzte Reihe von Wachstumsrichtungen zur Auswahl haben. Da wir die gesamte Pflanze über einen Zeitraum von Wochen gestalten wollen, verwenden wir Blaulichtreize, um den Phototropismus der Pflanze makroskopisch zu beeinflussen, über verschiedene Wachstumsperioden, einschließlich junger Triebe und späterer Stammversteifung. Wir führen die Experimente unter vollständig kontrollierten Umgebungslichtbedingungen durch, bei denen wir außer den Blaulichtreizen ausschließlich rotes Licht mit Spitzenemission bei Wellenlänge 650 nm liefern. Wenn sie eine Bifurkation im mechanischen Stützgitter erreichen, treffen sie eine binäre Entscheidung, ob sie links oder rechts wachsen. Die Roboter sind an diesen mechanischen Bifurkationen positioniert, die durch Entfernungen von 40 cm getrennt sind. Sie aktivieren und deaktivieren autonom ihre Blaulichtemission mit Spitzenemission bei Wellenlänge 465 nm, entsprechend einer vordefinierten Karte des gewünschten Wachstumsmusters (in diesem Fall ein Zickzackmuster). Auf diese Weise werden die Pflanzen in einer definierten Reihenfolge von der Bifurkation zur Bifurkation geführt. Zu einem bestimmten Zeitpunkt wird nur ein Roboter aktiviert, bei dem er blaues Licht aussendet und gleichzeitig das Pflanzenwachstum auf der darunter liegenden mechanischen Stütze autonom überwacht. Sobald er eine wachsende Spitze mit seinen Infrarot-Näherungssensoren erkennt, hört er auf, blaues Licht auszusenden und kommuniziert mit seinen benachbarten Robotern über Funk. Der Roboter, der sich selbst bestimmt, das nächste Ziel in der Sequenz zu sein, wird dann aktiviert und zieht das Pflanzenwachstum zu einer neuen mechanischen Bifurkation an.
Da unser Ansatz sowohl technische als auch natürliche Mechanismen umfasst, umfassen unsere Experimente mehrere Methoden, die gleichzeitig und voneinander abhängig sind. Das Protokoll wird hier zunächst nach der Art der Methode organisiert, die jeweils in ein einheitliches Experimentsetup integriert werden muss. Bei diesen Arten handelt es sich um Pflanzenarten; Roboter-Design einschließlich Hardware und Mechanik; Roboter-Software für Kommunikation und Steuerung; Überwachung und Erhaltung der Pflanzengesundheit. Das Protokoll setzt dann den Versuchsentwurf fort, gefolgt von der Datenerfassung und -aufzeichnung. Ausführliche Informationen zu den bisher erzielten Ergebnissen finden Sie unter Wahby et al.14. Repräsentative Ergebnisse umfassen drei Arten von Experimenten: Kontrollexperimente, bei denen alle Roboter keine Reize liefern (d. h. ruhend); Einzelentscheidungsexperimente, bei denen die Pflanze eine binäre Wahl zwischen einem Reiz-liefernden Roboter und einem ruhenden Roboter trifft; und Multiple-Decision-Experimente, bei denen die Pflanze durch eine Folge binärer Auswahlen navigiert, um ein vordefiniertes Muster zu erstellen.
Protokoll
1. Sortenauswahlverfahren
HINWEIS: Dieses Protokoll konzentriert sich auf das Pflanzenverhalten im Zusammenhang mit dem Klettern, die Richtungsreaktionen auf Licht sowie die Gesundheit und das Überleben der Pflanzen in der jeweiligen Jahreszeit, dem Jeweiligen Ort und den experimentellen Bedingungen.
- Wählen Sie eine Pflanzenart, die bekanntermaßen einen starken positiven Phototropismus15,16 in Richtung UV-A und blaues Licht (340–500 nm) in den Anbauspitzen zeigt.
- Wählen Sie eine Art aus, die ein Wickler ist, bei dem das Verhalten der Umrundung17 ausgeprägt ist und die wachsende Spitze spiralförmige Bahnen mit einer ausreichend großen Amplitude hat, um die mechanischen Stützen zu umrunden, die in den spezifischen experimentellen Bedingungen verwendet werden. Das vom ausgewählten Wickler gezeigte Zwillingsverhaltenvon 18 sollte die im Experiment vorhandene Umgebung und Nährstoffbedingungen vertragen und mechanische Stützen mit Neigungswinkel bis zu 45° vertragen.
- Wählen Sie eine Art aus, die unter den experimentellen Bedingungen zuverlässig und schnell wächst, mit einer durchschnittlichen Wachstumsgeschwindigkeit von nicht weniger als etwa 5 cm pro Tag und möglichst schneller, wenn möglich.
- Wählen Sie eine Art aus, die die erforderlichen Verhaltensweisen in der aktuellen Saison und am geografischen Standort anzeigt.
- Stellen Sie sicher, dass die Art den Bereich der Umgebungsparameter toleriert, die im Versuchsaufbau vorhanden sein werden. Die Pflanze sollte ein Fehlen von grünem Licht und ein Fehlen von Licht außerhalb des sichtbaren Spektrums (400–700 nm) tolerieren. Die Anlage sollte auch alle gegenwärtigen Temperaturschwankungen, die bei ca. 27 °C gehalten werden, sowie alle gegenwärtigen Schwankungen in Feuchtigkeit und Bewässerung tolerieren.
2. Roboterbedingungen und Design
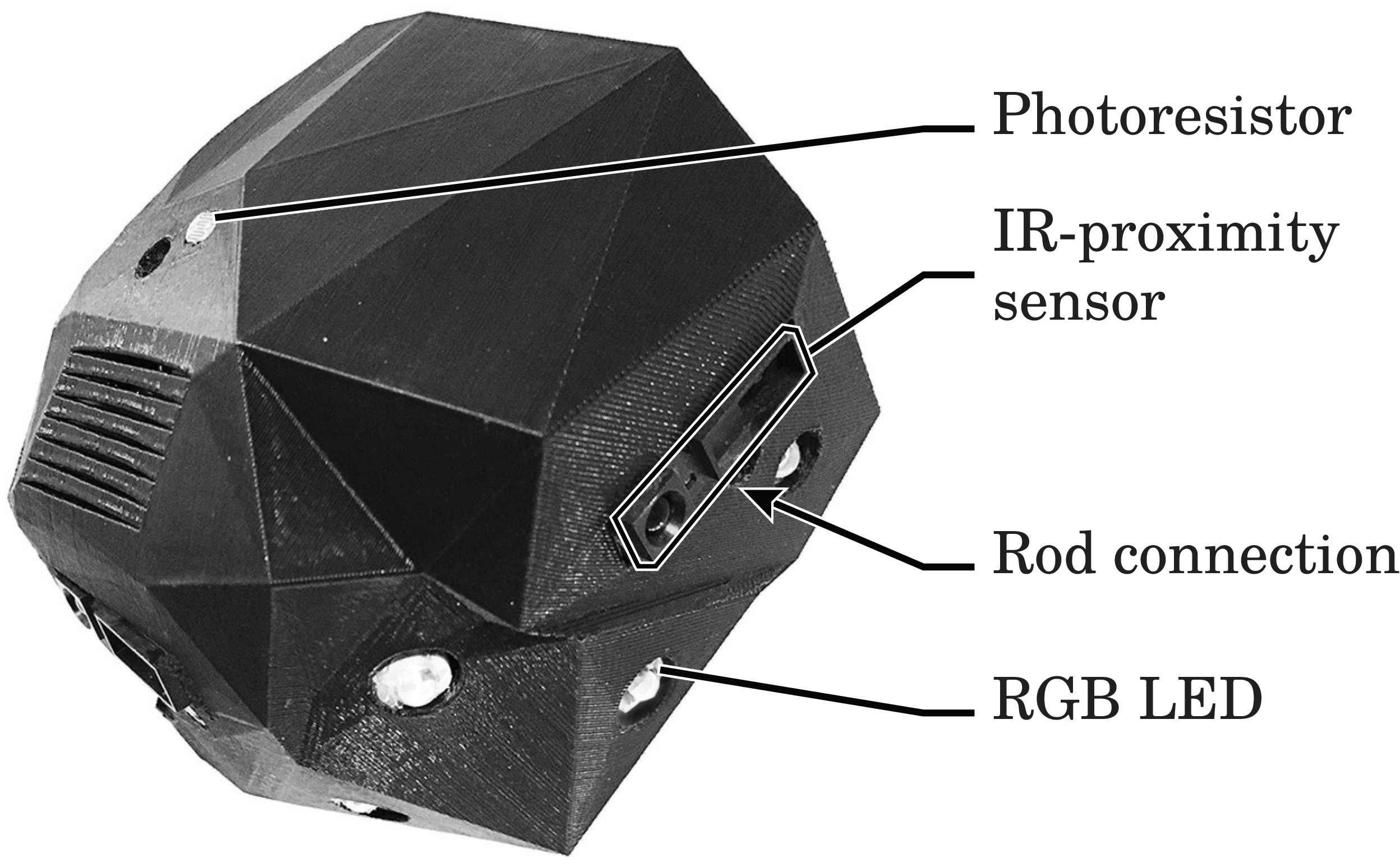
- Organisieren Sie Roboterfunktionen in dezentralen Knoten mit Einplatinencomputern (siehe Abbildung 1 und Abbildung 2), die in modulare mechanische Stützen integriert sind. Stellen Sie sicher, dass jeder identische Roboterknoten in der Lage ist, sein eigenes Verhalten zu steuern und auszuführen.
- Für die robotische Bereitstellung von Reizen für Pflanzen, geben Sie Blaulicht (400–500 nm) für Pflanzen in kontrollierbaren Intervallen, mit einer Intensität, die ihre phototrope Reaktion auslöst, aus der Richtung und Ausrichtung, die für den jeweiligen Teil des Experiments erforderlich ist .
- Wählen Sie eine rot-grün-blaue (RGB) Leuchtdiode (LED) oder eine isolierte blaue LED. In beiden Fällen, enthalten Sie eine LED mit einer blauen Diode mit Spitzenemission nmax = 465 nm.
- Wählen Sie eine LED aus, die, wenn sie in Gruppen zusammengeführt und unter den genauen Bedingungen des eingesetzten Roboters eingestellt ist, die erforderliche Lichtintensität in jeder im Experimentieraufbau getesteten Richtung beibehalten kann. Stellen Sie für jede getestete Richtung sicher, dass die blauen Dioden in den LEDs eines einzelnen Roboters gemeinsam in der Lage sind, eine Lichtintensität von ca. 30 Lumen ohne Überhitzung beizubehalten, wenn sie sich im eingesetzten Robotergehäuse und jedem eingesetzten Robotergehäuse befinden. Wärmeableitungsstrategien. Die gewählte LED sollte einen Betrachtungswinkel von ca. 120° haben.
HINWEIS: Zum Beispiel in einem Roboter mit drei LEDs pro Richtung, mit Mikrocontroller-aktivierte Regulierung der Intensität, wenn die blauen Dioden mit maximaler Lichtintensität emittieren , = 15 Lumen, dann ohne Überhitzung sollten sie in der Lage sein, 65% des Maximums zu halten.) - Verbinden Sie die LEDs über LED-Treiber, die die Stromversorgung entsprechend der gewünschten Helligkeit regeln, mit dem Einplatinencomputer des Roboters. Ermöglichen Sie die individuelle Steuerung, entweder jeder LED oder der LED-Gruppen, die jede Im-Setup getestete Richtung bedienen.
- Für das Sensorverfahren zur Nähe von Pflanzenanbauspitzen (siehe Abbildung 3B)können verarbeitete Messwerte von Infrarot-Näherungssensoren (IR-Näherung) zuverlässig und autonom das Vorhandensein von Pflanzen erkennen, die sich aus jeder getesteten Richtung nähern. im Setup.
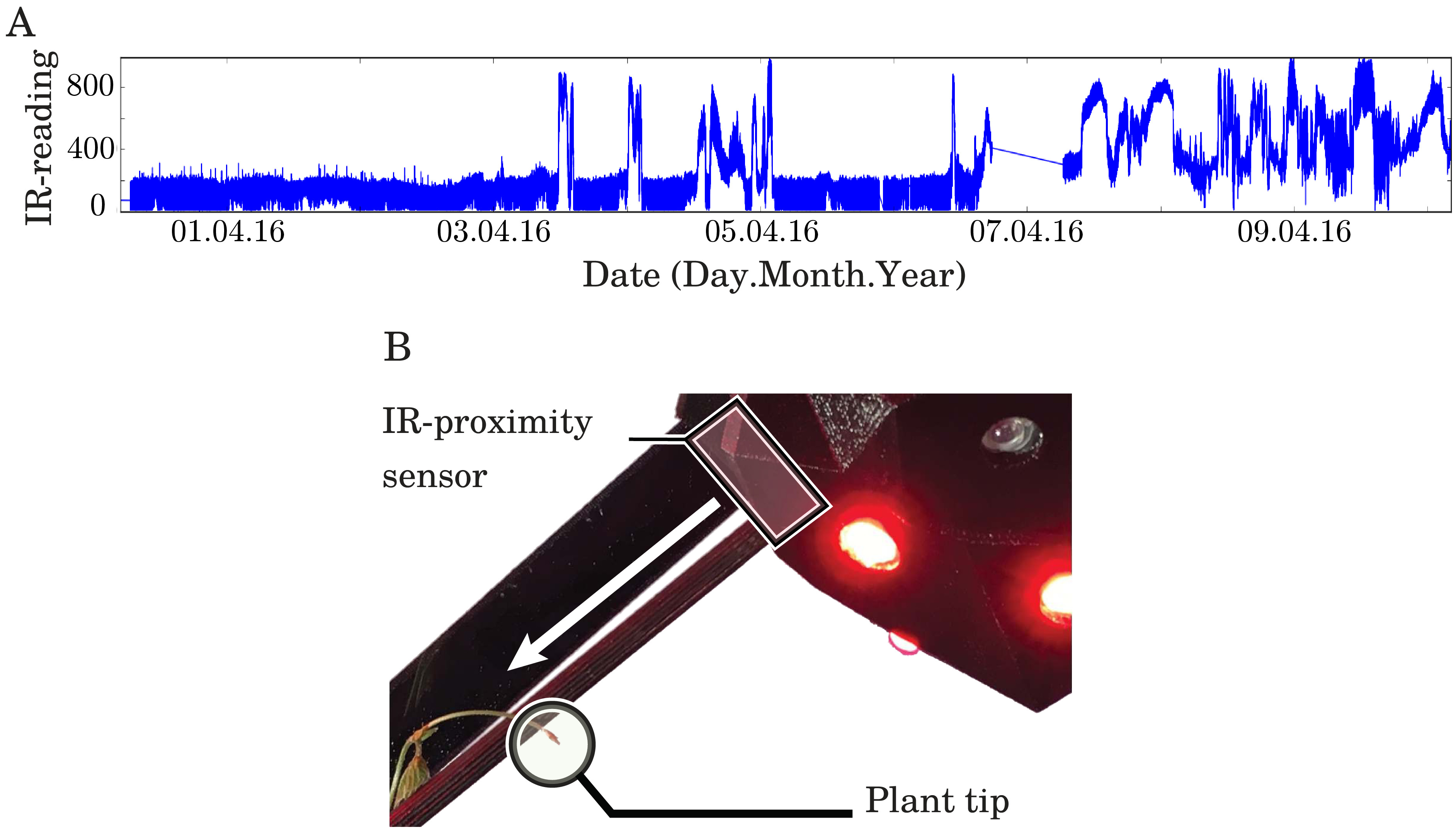
- Wählen Sie einen IR-Näherungssensor aus, der regelmäßig die wachsende Spitze der ausgewählten Pflanzenarten erkennt, wenn sie senkrecht zur zentralen Achse der Richtung angeordnet ist, aus der sich die Pflanze nähert, wie sie in einer ungehinderten Umgebung getestet wurde. Stellen Sie sicher, dass eine erfolgreiche Erkennung ab einem Abstand von 5 cm erfolgt, wie in Abbildung 3A ab dem Zeitstempel mit der Bezeichnung "07.04.16" auf der horizontalen Achse zu sehen ist.
- Verbinden Sie jeden IR-Näherungssensor mit dem Einplatinencomputer des Roboters und implementieren Sie einen gewichteten arithmetischen Mittelansatz, um die Sensorwerte zu einer Bestimmung zu verarbeiten, ob eine Pflanze innerhalb von 5 cm vorhanden ist. Verwenden Sie die Sensorwerte aus den neuesten um 20 % des bei der Detektion verwendeten Endgewichts zu geben.
- Stellen Sie sicher, dass der ausgewählte IR-Näherungssensor keine kritischen Wellenlängen aussendet, die das lichtgesteuerte Verhalten der ausgewählten Spezies beeinträchtigen könnten. Stellen Sie sicher, dass Wellenlängen, die vom Sensor unter 800 nm emittiert werden, nicht in Entfernungen von mehr als 5 mm von der IR-Quelle des Sensors vorhanden sind, gemessen durch spektrometer.
- Verteilen Sie die Experimentierfunktionen über den Satz von Robotern, so dass jeder Roboter die Teile, die in seinem eigenen lokalen Bereich ablaufen, autonom verwalten kann. Ordnen Sie die Bereitstellung von Lichtreizen und Sensorfähigkeiten der Roboter entsprechend den jeweiligen getesteten Pflanzenwachstumsrichtungen an.
- Verfassen Sie jeden Roboter um einen Einplatinencomputer, der für Wireless Local Area Network (WLAN) aktiviert ist. Verbinden Sie den Computer über eine kundenspezifische Leiterplatte (PCB) mit Sensoren und Aktoren. Schalten Sie jeden Roboter einzeln mit einem eigenen Batterie-Backup.
- Fügen Sie einen IR-Näherungssensor pro Richtung ein, der für herannahende Anlagen gemäß den oben genannten Anforderungen getestet wird.
- Fügen Sie genügend LEDs bei, um die oben genannten Anforderungen an blaues Licht zu erfüllen, und führen Sie eine Richtung ein, die für herannahende Anlagen getestet wird.
- Wenn Sie RGB-LEDs anstelle von blauen LEDs verwenden, aktivieren Sie optional die Emission aus der roten Diode, wenn die blaue Diode nicht verwendet wird, um die unten beschriebene Rotlichtabgabe zu erweitern (für pflanzengesundheitlich durch die Unterstützung der Photosynthese).
- Wenn rotes Licht von den Robotern in bestimmten Intervallen emittiert wird, dann verwenden Sie rote Dioden mit Spitzenemission von ca. max = 625–650 nm, ohne kritische Wellenlängen, die das grüne Band (d. h. unter 550 nm) oder das far-rote Band (d. h. über 700 nm) überlappen.
- Lassen Sie keine roten Dioden zu, die höhere Wärmeniveaus erzeugen als die blauen Dioden.
- Schließen Sie Hardware ein, die lokale Hinweise zwischen Robotern ermöglicht. Fügen Sie einen Photowiderstand (d. h. lichtabhängigen Widerstand oder LDR) für jede Richtung eines benachbarten Roboters ein, um ihren Lichtemittanzstatus zu überwachen. Alternativ können Sie den Status der nachbarn Nachbarn über WLAN kommunizieren.
- Schließen Sie Hardware ein, um Wärme abzuleiten, wie dies aufgrund der Bedingungen der ausgewählten blauen Dioden und des verwendeten Robotergehäuses erforderlich ist. Führen Sie eine Kombination aus Aluminium-Kühlkörpern, Belüftungsöffnungen im Gehäusegehäuse des Roboters und Lüftern aus. Aktivieren Sie Ventilatoren über einen digitalen Temperatursensor auf dem Einplatinencomputer oder eine zusätzliche Leiterplatte.
- Organisieren Sie die Roboterkomponenten so, dass die entsprechenden Richtungen einheitlich gewartet werden.
- Positionieren Sie die blauen Dioden, um eine gleichwertige Lichtintensität auf jede Der Richtungen zu verteilen, aus der sich pflanzen (d. h. von den mechanischen Stützen, die an der unteren Hälfte des Roboters befestigt sind, siehe Schritt 2.5). Richten Sie jede Diode im Robotergehäuse so aus, dass sich die Mittelachse ihres Linsenwinkels innerhalb von 60° jeder Achse der mechanischen Unterstützung befindet, die sie anrichtet, und positionieren Sie sie so, dass sie nicht durch das Robotergehäuse blockiert wird.
- Positionieren Sie die IR-Näherungssensoren entsprechend für ihre jeweiligen herannahenden Wachstumsrichtungen (d. h. von den mechanischen Stützen, die an der unteren Hälfte des Roboters befestigt sind, siehe Schritt 2.5). Positionieren Sie jeden IR-Näherungssensor innerhalb von 1 cm vom Befestigungspunkt zwischen dem gewarteten Roboter und der mechanischen Stütze, und richten Sie ihn so aus, dass sein Betrachtungswinkel parallel zur Stützachse verläuft. Stellen Sie sicher, dass Emitter und Empfänger nicht durch das Robotergehäuse blockiert werden.
- Positionieren Sie alle Photowiderstände für die lokale Kommunikation entsprechend für jede Richtung, die einem benachbarten Roboter im Setup zugewandt ist (d. h. von allen mechanischen Stützen, die am Roboter befestigt sind, siehe 2.5). Richten Sie jeden Fotowiderstand so aus, dass sich die Mittelachse ihres Betrachtungswinkels innerhalb von 45° der Unterstützungsachse befindet, die er anrichtet, und positionieren Sie nicht durch das Robotergehäuse blockiert werden.
- Montieren Sie alle Komponenten mit dem Einplatinencomputer (siehe Blockdiagramm in Abbildung 2). Stellen Sie sicher, dass der Computer für Wartungsarbeiten nach der Montage leicht zugänglich ist.
- Schnittstelle LEDs über LED-Treiber über LED-Treiber mittels Pulsweitenmodulation zum Computer. Verwenden Sie eine feste mechanische Verbindung zwischen den LEDs und entweder dem Gehäuse oder dem Kühlkörper, und verwenden Sie eine mechanisch uneingeschränkte Verbindung zwischen den LEDs und dem Computer.
- Schnittstellenlüfter zum Computer über linearen Regler (d.h. Schalter) über einen allgemeinen Eingang/Output-Header-Pin. Befestigen Sie Ventilatoren, bei denen ein ausreichender Luftstrom vorhanden ist, und stellen Sie gleichzeitig sicher, dass keine mechanische Beanspruchung auf sie ausgeübt wird.
- Schnittstelle IR-Näherungssensoren und Photowiderstände über Analog-Digital-Wandler über serielle Peripherieschnittstelle. Verwenden Sie eine feste mechanische Verbindung von den Sensoren zum Gehäuse und eine mechanisch uneingeschränkte Verbindung zum Computer.
- Herstellung des Robotergehäuses aus hitzebeständigem Kunststoff mit selektivem Lasersintern, Stereolithographie, Sicherungsabscheidungsmodellierung oder Spritzguss.
- Integrieren Sie die Roboter in eine Reihe modularer mechanischer Stützen, die die Roboter doppelt in Position halten und als Klettergerüst für die Pflanzen dienen, wodurch die wahrscheinlichen durchschnittlichen Wachstumspfade der Pflanzen eingeschränkt werden. Entwerfen Sie die Roboter als zusätzliche mechanische Verbindungen zwischen den Stützen, so positioniert, dass sie die Pflanzenwachstumsbahnen schneiden.
- Minimieren Sie die Größe des Roboters und stellen Sie sicher, dass er zuverlässig von einer nicht unterstützten Wachstumsspitze der ausgewählten Pflanzenarten übertroffen werden kann. Reduzieren Sie die Robotergröße so weit wie möglich, um die Experimentiergeschwindigkeit zu erhöhen.
- Gestalten Sie die Außenwände des Roboterkörpers so unauffällig wie möglich für das Pflanzenwachstum, wenn eine wachsende Spitze schrittweise um den Roboter navigiert. Rund oder facettenreich der Roboterkörper, um die spiralförmige Flugbahn der Umrundung bei zinernden Pflanzenarten nicht zu blockieren. Schließen Sie scharfe Vorsprünge und akute Einbuchtungen aus.
- Wählen Sie ein Material und Profil (d.h. Form des Querschnitts) für die mechanischen Stützen, so dass die ausgewählten Pflanzenarten es effektiv erklimmen können, z.B. eine Holzstange mit kreisförmigem Profil von etwa 8 mm oder weniger Durchmesser. Stellen Sie sicher, dass die mechanischen Stützen strukturell steif genug sind, um die Pflanzen und Roboter innerhalb des Setups zu unterstützen, ergänzt durch eine transparente Acrylfolie hinter dem Setup.
- An jedem Roboter sind Befestigungspunkte enthalten, um die angegebenen mechanischen Stützen zu verankern. Schließen Sie eine für jede Richtung ein, in die sich eine Pflanze einem Roboter nähern oder abfahren kann.
- Fügen Sie für jeden Befestigungspunkt eine Buchse in das Robotergehäuse ein, deren Abmessungen dem Querschnitt des Trägermaterials entsprechen.
- Stellen Sie die Buchse mit einer Tiefe von nicht weniger als 1 cm ein. Halten Sie die Buchse so flach, dass die Stütze nicht mit Komponenten im Inneren des Roboters kollidiert.
- Ordnen Sie die mechanischen Stützen in einem regelmäßig gerasterten Muster, gleichmäßig diagonal mit einem Neigungswinkel bei 45° oder steiler an. Machen Sie die Längen der Stützen einheitlich. Die minimale freiliegende Länge der Stütze beträgt 30 cm, um genügend Platz für die Kletterpflanzen zu ermöglichen, nachdem sie das Gebiet in ihrem nicht unterstützten Zustand erkundet haben. Die bevorzugte exponierte Länge beträgt 40 cm oder mehr, um einen Puffer für statistisch extreme Fälle von Pflanzenanbringung zu ermöglichen.
- Montieren Sie die mechanischen Elemente mit den Robotern. Das folgende Protokoll geht von einer freiliegenden Unterstützungslänge von 40 cm und einer Einrichtung von acht Robotern in vier Reihen aus (siehe Abbildung 6). Für andere Größen entsprechend skalieren.
- Auf der Bodenfläche, bauen Sie einen Stand 125 cm breit, die in der Lage ist, das Setup in einer aufrechten Position zu halten.
- Befestigen Sie ein 125 cm x 180 cm großes Blatt (8 mm dick oder mehr) aus transparentem Acryl am Ständer, so dass es aufrecht steht.
- Positionieren Sie Töpfe mit dem entsprechenden Boden auf dem Ständer, gegen das Acrylblech.
- Befestigen Sie zwei mechanische Y-Verbindungen auf der Acrylfolie, 10 cm über den Töpfen. Positionieren Sie die Gelenke 45 cm bzw. 165 cm rechts am linken Rand des Ständers.
- Befestigen Sie zwei Stützen am linken y-Gelenk, die sich 45° nach links und rechts lehnen, und befestigen Sie eine Stütze am rechten y-Gelenk, die 45° nach links geneigt ist.
- Befestigen Sie zwei Roboter an der Acrylfolie und legen Sie die Enden der zuvor platzierten Stützen in die Buchsen in den Robotergehäusen ein. Positionieren Sie die Roboter 35 cm über den y-Gelenken und 10 cm bzw. 80 cm rechts am linken Rand des Ständers.
- Wiederholen Sie das Muster, um die verbleibenden Roboter zu befestigen und im diagonal gerasterten Muster zu unterstützen (siehe Abbildung 6), so dass jede Reihe von Robotern 35 cm über der vorherigen Reihe liegt und jeder Roboter horizontal direkt über dem Roboter oder y-Joint positioniert ist, der zwei Zeilen darunter.
3. Roboter-Software
- Installieren Sie ein Betriebssystem (z. B. Raspbian) auf den Einplatinencomputern der Roboter.
- Führen Sie während jedes Experiments das Softwareprotokoll auf jedem Roboter parallel aus und aktivieren so ihr verteiltes autonomes Verhalten (siehe Wahby et al.14, für Pseudocode und weitere Details).
- Stellen Sie zwei mögliche Zustände für den Roboter her: einen ist ein Stimuluszustand, in dem der Roboter blaues Licht mit der oben beschriebenen Intensität aussendet; der andere ist ein ruhender Zustand, in dem der Roboter entweder kein Licht aussendet oder rotes Licht aussendet, wie oben beschrieben.
- Senden Sie im Stimuluszustand ein Pulsweitenmodulationssignal (PWM) über den Einplatinencomputer mit einer Frequenz, die der gewünschten Helligkeit entspricht, an die blauen LEDs-Treiber.
- Lösen Sie im Ruhezustand keine LEDs aus, oder senden Sie bei Bedarf ein PWM-Signal nur an die roten LEDs-Treiber.
- Weisen Sie in Kontrollexperimenten allen Robotern den ruhenden Zustandzu.
- Weisen Sie in Einzelentscheidungsexperimenten einem Roboter den ruhenden Zustand und einem Roboter den Stimuluszustand zu.
- Starten Sie in Mehrentscheidungsexperimenten den Initialisierungsprozess wie folgt.
- Versorgung jedes Roboters eine vollständige Konfigurationskarte des Im aktuellen Experiments zu testenden Musters des Pflanzenwachstums.
- Legen Sie die Position des Roboters innerhalb des Musters fest, entweder automatisch mit Lokalisierungssensoren oder manuell.
- Vergleichen Sie den Standort des Roboters mit der mitgelieferten Karte. Wenn die Position des Roboters die erste Position auf der Karte ist, stellen Sie den Roboter auf Stimulus; Andernfalls stellen Sie den Roboter auf ruhend . Der Initialisierungsprozess wird beendet.
- Starten Sie in Mehrentscheidungsexperimenten den Lenkungsprozess wie folgt. Führen Sie iterativ aus.
- Überprüfen Sie den IR-Näherungssensor des Roboters, um festzustellen, ob eine Anlage erkannt wurde.
- Wenn eine Pflanze erkannt wird und der Roboter auf ruhend eingestellt ist, dann warten.
- Wenn eine Pflanze erkannt wird und der Roboter auf Stimuluseingestellt ist, dann:
- Benachrichtigen Sie die benachbarten benachbarten Roboter, dass eine Anlage erkannt wurde, und fügen Sie die Position des Roboters in die Meldung ein.
- Stellen Sie den Roboter auf ruhend .
- Vergleichen Sie den Standort des Roboters mit der Karte. Wenn sich der Roboter an der letzten Position auf der Karte befindet, senden Sie ein Signal über WLAN, dass das Experiment abgeschlossen ist.
- Überprüfen Sie die eingehenden Nachrichten des Roboters von seinen benachbarten benachbarten Robotern, um zu sehen, ob einer von ihnen, der auf Stimulus eingestellt war, eine Pflanze erkannt hat.
- Wenn ein Stimulusnachbar eine Pflanze erkannt hat, vergleichen Sie den Standort des Nachbarn mit dem Standort des Roboters, und vergleichen Sie ihn auch mit der Karte.
- Wenn sich der Roboter an der nachfolgenden Position auf der Karte befindet, stellen Sie den Roboter auf Stimulusein.
- Beenden Sie die iterative Schleife des Lenkprozesses, sobald ein Signal empfangen wurde, dass das Experiment abgeschlossen ist.
4. Pflanzengesundheitsüberwachung und -wartung
- Suchen Sie den Versuchsaufbau unter kontrollierten Umgebungsbedingungen – insbesondere in Innenräumen ohne tageslichteinfalliges Tageslicht oder anderes Licht außerhalb der unten beschriebenen Bedingungen, mit kontrollierter Lufttemperatur und Luftfeuchtigkeit und mit kontrollierter Bodenbewässerung. Überwachen Sie die Bedingungen mit Sensoren, die mit einem Mikrocontroller oder Einplatinencomputer verbunden sind, der WLAN aktiviert ist.
- Pflegen Sie die Pflanzenphotosynthese mit LED-Wachstumslampen außerhalb der Roboter und mit Blick auf den Experimentaufbau.
- Verwenden Sie die Wachstumslampen, um monochromatisches rotes Licht an das Setup zu liefern, mit roten Dioden mit einer Spitzenemission von ca.max = 625–650 nm, ohne kritische Wellenlängen außerhalb des Bereichs von 550–700 nm, mit Ausnahme einer geringen Inzidenz von blauem Umgebungslicht, wenn für die Gesundheit der ausgewählten Arten hilfreich. Wenn eine geringe Inzidenz von blauem Umgebungslicht enthalten ist, beschränken Sie sich auf Niveaus in einem sehr geringen Bruchteil der werte, die von einem einzelnen Roboter emittiert werden.
- Geben Sie die Für die Gesundheit der ausgewählten Arten erforderlichen Rotlichtwerte an, in der Regel etwa 2000 Lumen oder mehr insgesamt.
- Richten Sie die Wachstumslampen an den Experimentaufbau aus, so dass ihre Emission ungefähr gleichmäßig über den Wachstumsbereich verteilt ist.
- Überwachen Sie die Umgebungslichtbedingungen mithilfe eines RGB-Farbsensors.
- Nach dem Keimen, geben Sie jeder Pflanze ihren eigenen Topf an der Basis des Experiments. Stellen Sie geeignetes Bodenvolumen und -typ für die ausgewählten Arten bereit. Stellen Sie sicher, dass der Boden und die Samen vor der Keimung desinfiziert wurden. Verwenden Sie geeignete Schädlingsbekämpfungsmethoden, um Insekten zu verhindern oder zu bewirtschaften, falls vorhanden.
- Regulieren Sie die Lufttemperatur und die Luftfeuchtigkeit entsprechend für die ausgewählten Arten mit Heizungen, Klimaanlagen, Luftbefeuchtern und Luftentfeuchtern. Überwachen Sie die Pegel mit einem Temperatur-Druck-Feuchtigkeitssensor.
- Überwachen Sie den Boden mit einem Bodenfeuchtesensor. Halten Sie eine angemessene Bewässerungsrate für die ausgewählte Art aufrecht. Führen Sie dieausführung mit einem automatisierten Bewässerungssystem aus, bei dem Wasser über Düsen in den Boden geleitet wird, wie sie durch die Werte des Bodenfeuchtesensors ausgelöst werden, oder über den Wasserboden manuell, wie durch die Sensorwerte geregelt.
5. Versuchsdesign
- Platzieren Sie Roboter und mechanische Stützen in einem Raster, das groß genug ist, um den Wachstumsbereich und das Muster abzudecken, das im Experiment getestet wird, nicht kleiner als eine Reihe und zwei Säulen von Robotern.
- Unter der unteren Reihe der Roboter platzieren Sie eine Reihe der standardmäßigen mechanischen mechanischen Standardstützen, die denen während des gesamten Setups entsprechen. Wenn sich die unteren Enden dieser Stützen schneiden, verbinden Sie sie mechanisch mit einem 'y-Joint'. Pflanzen Sie für jedes "y-Gelenk" an der Basis des Aufbaus eine einheitliche Anzahl von Pflanzen entsprechend der Größe der diagonalen Gitterzelle (etwa eine Pflanze pro 10 cm exponierte mechanische Stützlänge), wobei die oben beschriebenen Bedingungen für die Erhaltung der Pflanzengesundheit beschrieben sind.
- Wählen Sie einen auszuführenden Experimentstyp aus, und wählen Sie ggf. eine Menge und Verteilung von Robotern aus.
-
ExperimentTyp 1: Steuerung
HINWEIS: Dieser Versuchstyp testet das Wachstum der Kletterpflanzen unter Bedingungen ohne Lichtreize, um Phototropismus auszulösen. Es kann auf jeder Größe und Form des Setups ausgeführt werden.- Weisen Sie allen Robotern den ruheruhe Zustand zu (siehe Schritt 3.4) und laufen Sie kontinuierlich, bis die Ergebnisse manuell ausgewertet werden, um vollständig zu sein.
- Beobachten Sie, ob Pflanzen an den mechanischen Stützen befestigt sind. In einem erfolgreichen Experiment findet oder befestigt keine der Pflanzen die mechanischen Stützen.
-
Experiment Typ 2: Einzelentscheid
HINWEIS: Dieser Versuchstyp testet die Wachstumspfade der Pflanzen, wenn er mit binären Optionen präsentiert wird – eine Unterstützung, die zu einem ruhenden Roboter führt, und eine Unterstützung, die zu einem Stimulusroboter führt. Es wird nur auf der minimalen Einrichtung ausgeführt (d. h. eine Zeile, zwei Spalten).- Weisen Sie einem Roboter den ruhenden Zustand (siehe 3.5) und einem Roboter den Stimuluszustand zu. Laufen Sie kontinuierlich, bis einer der beiden Roboter eine Anlage mit dem IR-Näherungssensor erkennt.
- Beobachten Sie die Anlagenbefestigung an mechanischer Unterstützung, Wachstum entlang der Unterstützung und Sensor-Messwerte von Stimulusrobotern. In einem erfolgreichen Experiment erkennt der Roboter mit dem Stimuluszustand eine Pflanze, nachdem sie entlang der jeweiligen Stütze gewachsen ist.
-
Experimenttyp 3: Mehrfachentscheidung
HINWEIS: Dieser Versuchstyp testet das Wachstum der Pflanzen, wenn es mit mehreren nachfolgenden Reizbedingungen dargestellt wird, die eine Reihe von Entscheidungen gemäß einer vordefinierten globalen Karte auslösen. Es kann auf jeder Größe und Form des Setups ausgeführt werden, die mehr als die minimale Anzahl von Zeilen (d. h. zwei oder mehr) hat.- Stellen Sie den Robotern eine globale Karte des zu entwickelnden Musters zur Verfügung (siehe Schritte 3.6-3.7.7).
- Beobachten Sie die Anlagenbefestigungsereignisse und das Wachstumsmuster entlang der mechanischen Stützen.
- In einem erfolgreichen Experiment wird mindestens eine Pflanze auf jeder Unterstützung gewachsen sein, die auf der globalen Karte vorhanden ist.
- Darüber hinaus wird in einem erfolgreichen Experiment keine Pflanze die falsche Richtung gewählt haben, wenn sich ihre Wachstumsspitze am aktuell aktiven Entscheidungspunkt befindet.
- Berücksichtigen Sie hier keine fremden Anbautipps, wenn z.B. ein Verzweigungsereignis einen neuen Anbautipp an einen veralteten Ort auf der Karte platziert.
-
ExperimentTyp 1: Steuerung
6. Aufzeichnungsverfahren
- Speichern Sie Daten von Sensoren und Kameras zunächst am Einplatinencomputer, auf dem die Daten an Bord generiert wurden. Führen Sie onboard-Antwortserver aus, die auf erforderliche Anforderungen reagieren, z. B. den letzten gespeicherten Sensorlesen. Laden Sie die Daten und Protokolldateien in regelmäßigen Abständen über WLAN auf ein lokales NAS-Gerät (Network Attached Storage) hoch.
- Erfassen Sie Zeitraffervideos der Experimente kontinuierlich mit Kameras, die an zwei oder mehr Aussichtspunkten positioniert sind, wobei mindestens eine Kameraansicht das vollständige Experiment-Setup umfasst. Stellen Sie sicher, dass die aufgenommenen Bilder eine hohe Auflösung aufweisen, um die Bewegungen der Pflanzenwachstumsspitzen, in der Regel nur wenige Millimeter breit, angemessen zu erfassen.
- Automatisieren Sie den Bildaufnahmeprozess, um konsistente Zeitintervalle zwischen den Aufnahmen zu gewährleisten, indem Sie eine Onboard-Kamera auf einem Einzelplatinencomputer oder eine eigenständige Digitalkamera verwenden, die mit einem Intervallmesser automatisiert wird. Installieren Sie Lampen, um als Blitze zu fungieren, automatisiert ähnlich wie die Kameras. Stellen Sie sicher, dass die Blitze hell genug sind, um mit dem roten Licht der Wachstumslampen zu konkurrieren, ohne die Bilder für die Farbkorrektur dramatisch nachzubearbeiten.
- Suchen Sie die Blitze so, dass das Experiment-Setup vollständig beleuchtet und somit in Bildern deutlich sichtbar ist. Synchronisieren Sie die Kameras und die Blitze so, dass alle Kameras Bilder gleichzeitig während einer 2 s Blitzperiode aufnehmen. Erfassen Sie die Bilder alle 2 Minuten für die Dauer jedes Experiments.
- Protokollieren Sie die Umgebungssensordaten, insbesondere die Messwerte des Temperatur-Druck-Feuchtigkeitssensors, des RGB-Farbsensors und des Bodenfeuchtesensors. Protokollieren Sie die Daten aller Roboter im Setup, insbesondere den IR-Näherungssensor und die Photoresistenzwerte, sowie den internen Zustand des Roboters, der seinen LED-Emittanzstatus definiert.
- Stellen Sie alle aufgezeichneten Daten für die Fernüberwachung der Experimente über regelmäßige Echtzeitberichte zur Verfügung, um sicherzustellen, dass die richtigen Bedingungen für die gesamte Versuchsdauer bis zu mehreren Monaten eingehalten werden.
Ergebnisse
Steuerung: Pflanzenverhalten ohne Roboterstimuli.
Aufgrund des Mangels an blauem Licht (d.h. alle Roboter schlummern)wird in der Anlage kein positiver Phototropismus ausgelöst. Daher zeigen die Pflanzen ein unvoreingenommenes Wachstum nach oben, da sie dem Gravitropismus folgen. Sie zeigen auch eine typische Umrundung (d. h. Wicklung), siehe Abbildung 4A. Wie erwartet, finden die Anlagen nicht die mechanische Unterstützung, die zu den ruhenden Robotern führt. Die Pflanzen brechen zusammen, wenn sie ihr eigenes Gewicht nicht mehr tragen können. Wir stoppen die Experimente, wenn mindestens zwei Pflanzen zusammenbrechen, siehe Abbildung 4B, C.
Einzel- oder Mehrfachentscheidungen: Pflanzenverhalten mit Roboterstimuli
In vier Einzelentscheidungsexperimenten haben zwei Läufe links lenkung (d.h. der Roboter links der Bifurkation wird aktiviert, um zu stimulieren),und zwei Durchläufe haben rechts gerichtete Lenkung. Die Stimulusroboter steuern die Pflanzen erfolgreich in Richtung der richtigen Stütze, siehe Abbildung 5. Die nächste Pflanze mit Stielwinkel, die dem der richtigen Stütze am ähnlichsten ist, wird zuerst befestigt. In jedem Experiment heftet sich mindestens eine Pflanze an die Stütze und klettert sie, bis sie den Stimulusroboter erreicht und damit das Experiment beendet. In einem Experiment heftet sich eine zweite Pflanze an die richtige Stütze. Die übrigen Pflanzen können auch in längeren Experimentierdauern anhaften. Keine der Pflanzen hängt an der falschen Stütze. Jedes Experiment läuft im Durchschnitt 13 Tage ununterbrochen.
In zwei Multiple-Decision-Experimenten wachsen die Pflanzen zu einem vordefinierten Zickzackmuster heran, siehe Abbildung 6A. Jedes Experiment dauert etwa sieben Wochen. Wenn ein Experiment beginnt, setzt ein Roboter seinen Status auf Stimulus (siehe 3.6.3) und steuert die Pflanzen nach dem vorgeschriebenen Muster zur richtigen Stütze. Eine Pflanze befestigt und klettert sie und gelangt so zum aktivierten Stimulusroboter und vollendet damit die erste Entscheidung. Nach 3.7.3 wird der aktuelle Stimulusroboter dann ruhend und benachrichtigt seine angrenzenden Nachbarn. Der ruhende Nachbar, der als nächstes auf dem Zickzack-Muster ist, schaltet sich auf Stimulus um (siehe 3.7.6). Wird eine Pflanze von einem ruhenden Roboter erkannt, reagiert dieser Roboter nicht (siehe 3.7.2). Die weiteren drei Entscheidungen werden fortgesetzt und abgeschlossen. Das vordefinierte Zickzack-Muster ist daher ausgewachsen, siehe Abbildung 6B.
Alle Experimentierdaten sowie Videos sind online verfügbar24.

Abbildung 1. Der unbewegliche Roboter und seine Hauptkomponenten. Abbildung aus der Autorenpublikation Wahby et al.14, die mit Der Creative Commons Lizenz CC-BY 4.0 (siehe ergänzende Dateien) verwendet wird, mit Änderungen, wie es die Lizenz erlaubt. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}

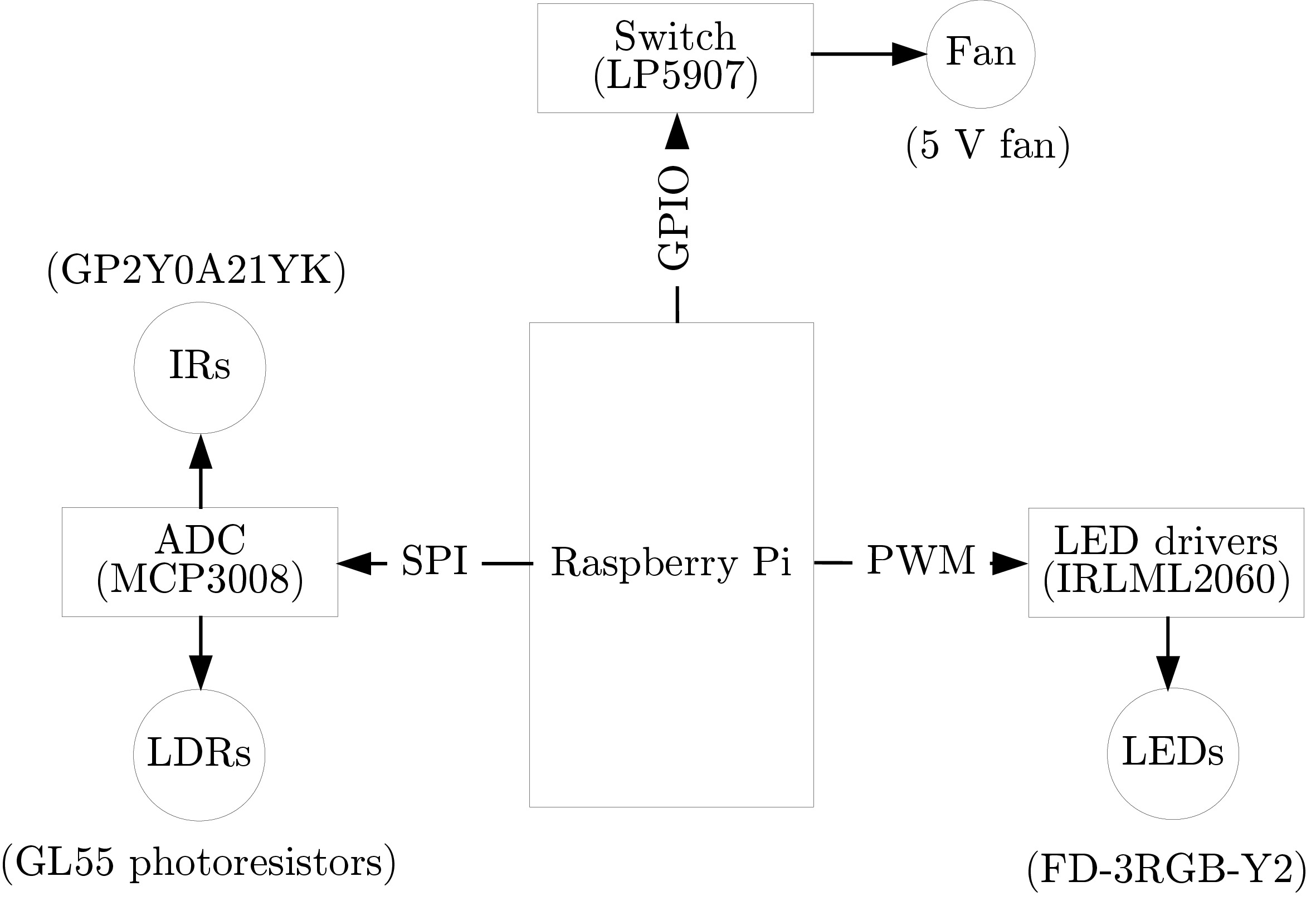
Abbildung 2. Das Komponentendiagramm der unbeweglichen Roboterelektronik. Die LED-Treiber IRLML2060 werden über PWM mit dem Einplatinencomputer des Roboters (z.B. Raspberry Pi) angebunden, um die Helligkeit der LEDs zu steuern. Ein LP5907-Schalter wird über einen GPIO-Header-Pin (General-Purpose Input/Output) mit dem Single-Board-Computer angebunden, um den Lüfter zu steuern. Ein MCP3008 Analog-Digital-Wandler (ADC) wird über die serielle Peripherieschnittstelle (SPI) mit dem Single-Board-Computer verbunden, um die analogen IR- und Licht-abhängigen Widerstandsdaten (LDR) zu lesen. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}

Abbildung 3. Kurz nach '03.04.16' klettert eine Pflanzenspitze auf einen Träger und kommt in das Sichtfeld des Roboters. (A) Beispiel IR-Näherungssensor skalierte Spannungswerte (vertikale Achse) während eines Experiments. Höhere Werte weisen auf die Erkennung von Pflanzenspitzen hin. (B) Der IR-Näherungssensor wird entsprechend der Stützbefestigung platziert und ausgerichtet, um eine effektive Pflanzenspitzenerkennung zu gewährleisten. Abbildung aus der Autorenpublikation Wahby et al.14, die mit Der Creative Commons Lizenz CC-BY 4.0 (siehe ergänzende Dateien) verwendet wird, mit Änderungen, wie es die Lizenz erlaubt. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}

Abbildung 4. Kontrollexperimente ergebnisse Rahmen, die zeigen, dass alle vier Pflanzen ohne blaues Licht keine Unterstützung anhaften. (A) Nach fünf Tagen wachsen alle Pflanzen in einem der Kontrollexperimente nach oben (siehe (C) für spätere Wachstumsbedingungen). (B) Nach 15 Tagen brachen drei Pflanzen zusammen, und eine wuchs im ersten Kontrollexperiment noch nach oben. (C) Nach sieben Tagen brachen zwei Pflanzen zusammen, und zwei wuchsen im zweiten Kontrollexperiment noch nach oben (siehe (A) für den vorherigen Wachstumszustand). Abbildung aus der Autorenpublikation Wahby et al.14, die mit Der Creative Commons Lizenz CC-BY 4.0 (siehe ergänzende Dateien) verwendet wird, mit Änderungen, wie es die Lizenz erlaubt. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}

Abbildung 5. Einzelentscheidungsexperimente ergebnisse Frames, die die Fähigkeit eines Stimulusroboters zeigen, die Pflanzen durch eine binäre Entscheidung zu steuern, um die richtige Unterstützung zu erklimmen. In allen vier Experimenten wird ein Roboter zum Stimulus und der andere zum Schlafengebracht - an zwei gegenüberliegenden Seiten einer Kreuzung. Die Rahmen zeigen die Position der Pflanzen unmittelbar bevor der Stimulusroboter sie erkennt. In jedem Experiment heftet sich mindestens eine Pflanze an die richtige Stütze, und keine Pflanze heftet sich an die falsche. Auch die nicht unterstützten Pflanzen zeigen Wachstum in Richtung des Stimulusroboters verzerrt. E, F, G, H sind Nahaufnahmen von A, B, C, D bzw. Abbildung aus der Autorenpublikation Wahby et al.14, die mit Der Creative Commons Lizenz CC-BY 4.0 (siehe ergänzende Dateien) verwendet wird, mit Änderungen, wie es die Lizenz erlaubt. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}

Abbildung 6. Multiple-Decision-Experiment. (A) Das Ziel-Zickzack-Muster wird auf der Karte grün hervorgehoben. (B) Der letzte Rahmen aus dem Experiment (nach 40 Tagen), der die Situation der Pflanzen zeigt, bevor der letzte Stimulusroboter auf dem Muster sie erkennt. Die Roboter wachsen erfolgreich das Zickzack-Muster. Abbildung aus der Autorenpublikation Wahby et al.14, die mit Der Creative Commons Lizenz CC-BY 4.0 (siehe ergänzende Dateien) verwendet wird, mit Änderungen, wie es die Lizenz erlaubt. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
{kind=link}
Diskussion
Die vorgestellte Methodik zeigt erste Schritte zur Automatisierung der reizgetriebenen Steuerung des Pflanzenwachstums, um spezifische Muster zu erzeugen. Dies erfordert die kontinuierliche Erhaltung der Pflanzengesundheit und kombiniert in einem einzigen Experiment die unterschiedlichen Bereiche der biochemischen Wachstumsreaktionen und entwickelt mechatronische Funktionen-Sensing, Kommunikation, und kontrollierte Erzeugung von Reizen. Da wir uns hier auf Kletterpflanzen konzentrieren, ist auch die mechanische Unterstützung ein integraler Bestandteil. Eine Einschränkung des aktuellen Setups ist seine Größe, aber wir glauben, dass unsere Methodik leicht skaliert werden kann. Das mechanische Gerüst kann für größere Setups und damit längere Wachstumsperioden erweitert werden, was auch erweiterte Konfigurationen und Muster ermöglicht. Hier beschränkt sich das Setup auf zwei Dimensionen und binäre Links-Rechts-Entscheidungen, da das Wachstum auf ein Raster mechanischer Stützen bei 45°-Neigung beschränkt ist und die Entscheidungspositionen der Anlage auf die Bifurkationen dieses Rasters beschränkt sind. Mechanische Erweiterungen können 3D-Gerüste und unterschiedliche Materialien enthalten, um komplexe Formen9,19zu ermöglichen. Die Methode kann als systemzum automatischen Wachstum von Mustern betrachtet werden, die von einem Benutzer definiert werden. Durch die Erweiterung der möglichen Komplexität mechanischer Konfigurationen sollten Benutzer nur mit wenigen Einschränkungen für ihre gewünschten Muster konfrontiert sein. Für eine solche Anwendung sollte ein Benutzer-Software-Tool bestätigen, dass das Muster produziert werden kann, und die Mechatronik sollte dann die Produktion des Musters selbst organisieren, indem sie geeignete Reize erzeugt, um die Pflanzen zu steuern. Die Software sollte auch erweitert werden, um Wiederherstellungspläne und Richtlinien zu implementieren, wie mit dem Wachstum fortgesetzt werden, wenn das ursprüngliche geplante Muster teilweise fehlgeschlagen ist - zum Beispiel, wenn der erste aktivierte Roboter noch nie eine Pflanze erkannt hat, aber die schlafenden haben dass die Position der wachsenden Spitzen über den aktivierten Roboter hinausgeht.
In der vorgestellten Methodik ist ein Beispiel für Pflanzenarten, die die Protokollauswahlkriterien erfüllen, die Kletter-Common-Bean, P. vulgaris. Dies ist die Art, die in den repräsentativen Ergebnissen verwendet wird. Da P. vulgaris einen starken positiven Phototropismus für UV-A und blaues Licht aufweist, absorbieren die Phototropine (Lichtrezeptorproteine) in der Pflanze Photonen, die Wellenlängen 340-500 nm entsprechen. Wenn die Rezeptoren ausgelöst werden, tritt die erste Schwellung im Stamm durch die bevorzugte Verlagerung von Wasser in das Stammgewebe auf, das sich den ausgelösten Rezeptoren widersetzt, was zu einer reversiblen Richtungsreaktion führt. Dann, innerhalb des Stammes, Auxin (Pflanzenmusterhormon) wird an die gleiche Gewebeposition gerichtet, die Richtungsreaktion verewigen und Stammgewebe fixieren, wie sie versteifen. Dieses Verhalten kann für die Gestaltung der Pflanzen unter diesen kontrollierten Raumbedingungen verwendet werden, da die Pflanzen nur isoliertem blauem Licht und isoliertem rotem Licht ausgesetzt sind, mit einfallendem fernen roten Licht von IR-Näherungssensoren bei niedrigen Pegeln, dass es nicht stört mit Verhaltensweisen wie der Farbvermeidungsreaktion20,21. Die Phototropismus-Reaktion in der Anlage reagiert im Aufbau auf Licht von blauen Dioden mit Spitzenemission max = 465 nm, und die Photosynthese22,23 in der Anlage wird durch rote Dioden mit Spitzenemission unterstützt. P. vulgaris bis zu mehreren Meter hoch wachsen eignet sich in der Gesamteinrichtung, da die ca. 3 L gewerblichen Gartenerde pro Topf benötigt passt der Einrichtungskala.
Obwohl sich das aktuelle Setup auf Licht als Anziehungskraft konzentriert, können zusätzliche Reize für andere Experimenttypen relevant sein. Wenn das gewünschte Muster eine Trennung zwischen verschiedenen Pflanzengruppen erfordert (z. B. benötigt das gewünschte Muster zwei Gruppen von Pflanzen, um entgegengesetzte Seiten zu wählen), dann ist es möglicherweise nicht mit nur einer Art von Stimulus möglich. Bei solch komplexen Wachstumsmustern unabhängig von Gerüstform können die verschiedenen Pflanzengruppen potenziell in unterschiedlichen Zeiträumen angebaut werden, so dass ihre jeweiligen Anziehungsreize nicht stören, was auch die Integration von Verzweigungen ermöglichen würde. Ereignisse. Dies kann jedoch nicht immer eine geeignete Lösung sein, und der standardmäßige attraktive Lichtreiz könnte dann durch abstoßende Einflüsse wie Schattierungen oder durch andere Reize wie weitrotes Licht oder Vibrationsmotoren9,14ergänzt werden.
Die vorgestellte Methode und das Experimentdesign sind nur ein erster Schritt hin zu einer ausgeklügelten Methodik, die das Richtungswachstum von Pflanzen automatisch beeinflussen kann. Das Experiment-Setup ist grundlegend, indem nur eine Abfolge von binären Entscheidungen in den Pflanzen bestimmt wird und wir uns auf eine, einfach zu verwaltende Stimulus. Zusätzliche Studien wären erforderlich, um die statistische Signifikanz der Methode zu beweisen, mehr Reize hinzuzufügen und andere Prozesse wie Verzweigung zu kontrollieren. Mit ausreichender Entwicklung, um die langfristige Zuverlässigkeit der Roboter zu gewährleisten, könnte die vorgestellte Methodik die Automatisierung von Anlagenexperimenten über lange Zeiträume ermöglichen und den Aufwand reduzieren, der mit der Untersuchung von Anlagenentwicklungsphasen verbunden ist. über das hinaus, was von Trieben geht. Ähnliche Methoden können zukünftige Untersuchungen der untererforschten Dynamik zwischen biologischen Organismen und autonomen Robotern ermöglichen, wenn beide als eng gekoppelte selbstorganisierende biohybride Systeme fungieren.
Offenlegungen
Die Autoren erklären, dass sie keine konkurrierenden finanziellen Interessen haben.
Danksagungen
Diese Studie wurde durch das Projekt Flora robotica unterstützt, das im Rahmen der FET-Zuschussvereinbarung Nr. 640959 aus dem Forschungs- und Innovationsprogramm Horizont 2020 der Europäischen Union gefördert wurde. Die Autoren danken Anastasios Getsopulos und Ewald Neufeld für ihren Beitrag zur Hardwaremontage und Tanja Katharina Kaiser für ihren Beitrag zur Überwachung von Pflanzenexperimenten.
Materialien
| Name | Company | Catalog Number | Comments |
| 3D printed case | Shapeways, Inc | n/a | Customized product, https://www.shapeways.com/ |
| 3D printed joints | n/a | n/a | Produced by authors |
| Adafruit BME280 I2C or SPI Temperature Humidity Pressure Sensor | Adafruit | 2652 | |
| Arduino Uno Rev 3 | Arduino | A000066 | |
| CdS photoconductive cells | Lida Optical & Electronic Co., Ltd | GL5528 | |
| Cybertronica PCB | Cybertronica Research | n/a | Customized product, http://www.cybertronica.de.com/download/D2_node_module_v01_appNote16.pdf |
| DC Brushless Blower Fan | Sunonwealth Electric Machine Industry Co., Ltd. | UB5U3-700 | |
| Digital temperature sensor | Maxim Integrated | DS18B20 | |
| High Power (800 mA) EPILED - Far Red / Infra Red (740-745 nm) | Future Eden Ltd. | n/a | |
| I2C Soil Moisture Sensor | Catnip Electronics | v2.7.5 | |
| IR-proximity sensors (4-30 cm) | Sharp Electronics | GP2Y0A41SK0 | |
| LED flashlight (50 W) | Inter-Union Technohandel GmbH | 103J50 | |
| LED Red Blue Hanging Light for Indoor Plant (45 W) | Erligpowht | B00S2DPYQM | |
| Low-voltage submersible pump 600 l/h (6 m rise) | Peter Barwig Wasserversorgung | 444 | |
| Medium density fibreboard | n/a | n/a | For stand |
| Micro-Spectrometer (Hamamatsu) on an Arduino-compatible breakout board | Pure Engineering LLC | C12666MA | |
| Pixie - 3W Chainable Smart LED Pixel | Adafruit | 2741 | |
| Pots (3.5 l holding capacity, 15.5 cm in height) | n/a | n/a | |
| Power supplies (5 V, 10 A) | Adafruit | 658 | |
| Raspberry Pi 3 Model B | Raspberry Pi Foundation | 3B | |
| Raspberry Pi Camera Module V2 | Raspberry Pi Foundation | V2 | |
| Raspberry Pi Zero | Raspberry Pi Foundation | Zero | |
| RGB Color Sensor with IR filter and White LED - TCS34725 | Adafruit | 1334 | |
| Sowing and herb soil | Gardol | n/a | |
| String bean | SPERLI GmbH | 402308 | |
| Transparent acrylic 5 mm sheet | n/a | n/a | For supplemental structural support |
| Wooden rods (birch wood), painted black, 5 mm diameter | n/a | n/a | For plants to climb |
Referenzen
- Åstrand, B., Baerveldt, A. J. An agricultural mobile robot with vision-based perception for mechanical weed control. Autonomous Robots. 13 (1), 21-35 (2002).
- Blackmore, B. S. A systems view of agricultural robots. Proceedings of 6th European conference on precision agriculture (ECPA). , 23-31 (2007).
- Edan, Y., Han, S., Kondo, N. Automation in agriculture. Springer handbook of automation. , 1095-1128 (2009).
- Van Henten, E. J., et al. An autonomous robot for harvesting cucumbers in greenhouses. Autonomous Robots. 13 (3), 241-258 (2002).
- Al-Beeshi, B., Al-Mesbah, B., Al-Dosari, S., El-Abd, M. iplant: The greenhouse robot. Proceedings of IEEE 28th Canadian Conference on Electrical and Computer Engineering (CCECE). , 1489-1494 (2015).
- Giraldo, J. P., et al. Plant nanobionics approach to augment photosynthesis and biochemical sensing. Nature Materials. 13 (4), (2014).
- Mazarei, M., Teplova, I., Hajimorad, M. R., Stewart, C. N. Pathogen phytosensing: Plants to report plant pathogens. Sensors. 8 (4), 2628-2641 (2008).
- Zimmermann, M. R., Mithöfer, A., Will, T., Felle, H. H., Furch, A. C. Herbivore-triggered electrophysiological reactions: candidates for systemic signals in higher plants and the challenge of their identification. Plant Physiology. , 01736 (2016).
- Hamann, H., et al. . Flora robotica--An Architectural System Combining Living Natural Plants and Distributed Robots. , (2017).
- Arkin, R. C., Egerstedt, M. Temporal heterogeneity and the value of slowness in robotic systems. Proceedings of IEEE International Conference on Robotics and Biomimetics (ROBIO). , 1000-1005 (2015).
- Mahlein, A. K. Plant disease detection by imaging sensors-parallels and specific demands for precision agriculture and plant phenotyping). Plant Disease. 100 (2), 241-251 (2016).
- Wahby, M., et al. A robot to shape your natural plant: the machine learning approach to model and control bio-hybrid systems. Proceedings of the Genetic and Evolutionary Computation Conference (GECCO '18). , 165-172 (2018).
- Bastien, R., Douady, S., Moulia, B. A unified model of shoot tropism in plants: photo-, gravi-and propio-ception. PLoS Computational Biology. 11 (2), e1004037 (2015).
- Wahby, M., et al. Autonomously shaping natural climbing plants: a bio-hybrid approach. Royal Society Open Science. 5 (10), 180296 (2018).
- Liscum, E., et al. Phototropism: growing towards an understanding of plant movement. Plant Cell. 26, 38-55 (2014).
- Christie, J. M., Murphy, A. S. Shoot phototropism in higher plants: new light through old concepts. American Journal of Botany. 100, 35-46 (2013).
- Migliaccio, F., Tassone, P., Fortunati, A. Circumnutation as an autonomous root movement in plants. American Journal of Botany. 100, 4-13 (2013).
- Gianoli, E. The behavioural ecology of climbing plants. AoB Plants. 7, (2015).
- Vestartas, P., et al. Design Tools and Workflows for Braided Structures. Proceedings of Humanizing Digital Reality. , 671-681 (2018).
- Pierik, R., De Wit, M. Shade avoidance: phytochrome signalling and other aboveground neighbour detection cues. Journal of Experimental Botany. 65 (10), 2815-2824 (2014).
- Fraser, D. P., Hayes, S., Franklin, K. A. Photoreceptor crosstalk in shade avoidance. Current Opinion in Plant Biology. 33, 1-7 (2016).
- Hogewoning, S. W., et al. Photosynthetic Quantum Yield Dynamics: From Photosystems to Leaves. The Plant Cell. 24 (5), 1921-1935 (2012).
- McCree, K. J. The action spectrum, absorptance and quantum yield of photosynthesis in crop plants. Agricultural Meteorology. 9, 191-216 (1971).
- . Autonomously shaping natural climbing plants: a bio-hybrid approach [Dataset] Available from: https://doi.org/10.5281/zenodo.1172160 (2018)
Nachdrucke und Genehmigungen
Genehmigung beantragen, um den Text oder die Abbildungen dieses JoVE-Artikels zu verwenden
Genehmigung beantragenThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Alle Rechte vorbehalten