
Method Article
有机硅为基础的介电弹性体致动器的制作工艺
摘要
This manuscript shows the fabrication process for the manufacture of dielectric elastomer soft actuators based on silicone membranes. The three key stages of production are presented in detail: blade casting of thin silicone membranes; pad printing of compliant electrodes; and the assembly of all the components.
摘要
这种贡献表明介电弹性体换能器(dets的)的制造过程。 dets的是可拉伸的电容器组成的弹性介电膜两个柔顺电极夹着的。作为致动器使用这些换能器的大的致动株时(超过300%的面积的应变)和它们的柔软和适形性已被开发用于广泛的应用,包括电可调光学,触觉反馈装置,波浪能量收集,可变形的细胞 - 文化设备,标准夹具,以及仿生鱼状飞艇的推进。在大多数情况下,dets的是由用市售的专有丙烯酸弹性体和用碳粉或碳润滑脂的手施加的电极。这种组合导致了非重复性的和缓慢的执行机构表现出粘弹性蠕变和寿命短。我们在座的限定词的可重复制造的基础上薄的弹性硅一个完整的工艺流程Ë部电影,其中薄的硅膜,膜的释放和预拉伸,强大的兼容电极,组装和测试的图形化的铸造。将膜浇铸在涂有水溶性牺牲层为便于释放的柔性聚对苯二甲酸乙酯(PET)衬底。所述电极由分散到有机硅基质炭黑颗粒的并用冲压技术,这导致精确定义了呈现高粘附到它们所施加的电介质膜兼容电极图案化。
引言
介电弹性体换能器(DETS)是软装置,它由一弹性的介电膜(典型地为10-100微米厚),两个柔顺电极夹着的,从而形成了橡胶状电容器1。 dets的可作为能产生非常大的应变的致动器(高达1700%的表面应变已被证实)2,软应变传感器3,或者作为软发电机4。当作为致动器使用时,电压施加在两个电极之间施加。所产生的静电力挤出电介质膜,降低其厚度,并提高其表面积(图1)1。除了致动器,相同的基本结构(薄的弹性体膜和拉伸的电极)可被用作应变传感器或能量收集装置,以静电电容的诱发机械变形的变化的优点。介电弹性体产生大的应变ctuators(DEAS)和它们的柔软和适形性质已被用于许多应用中,如电可调透镜5,回转马达6,变形的细胞培养装置7,和推进生物启发鱼状飞艇8。
最dets的文献报道使用自3M专有的丙烯酸弹性体膜名为VHB作为介电弹性体膜,因为它已被表明表现出非常大的致动株1。这种材料在薄膜形式的可用性也是在其广泛使用DET的应用的关键因素,即使(驱动应变放置一边),它有一些重要的缺点,如机械损失和粘弹蠕变限制其响应速度一个小的操作温度范围,和一个倾向撕裂。相比较而言,硅氧烷弹性体也可以被用作电介质膜为dets的,导致器件具有响应速度快1000倍除了 丙烯酸弹性体,由于它们大大减少机械损失9。此外,它们在大范围的硬度的,这提供了额外的设计自由度可用。然而,硅氧烷通常以粘稠碱形式,它必须在薄的膜可以应用于用于dets的出售。然而,这提供了又一个自由的附加度数,作为膜的厚度可以自由选择并且不是由制造商施加,如为预制膜的情况。
这个协议示出了介电弹性体致动器的制造。但是,它也可以应用于几乎没有修改为介电弹性体换能器在更大的意义,其中包括能量收集装置和应变传感器的制造。我们在这里为上涂有水溶性牺牲层柔性的PET基底薄(10-100微米)的硅氧烷薄膜的大面积(A4)的铸造方法。牺牲层减小了力量REQuired与硅氧烷膜与基板分离,从而减少释放期间膜的机械变形。该膜的变形可导致各向异性的机械性能,由于应力引起的软化(Mullins的效果)10,因此应该避免。电极是一DET的第二个键组件。它们的作用是分发的电荷弹性膜片的表面上。为了产生可靠的致动器中,电极必须能承受反复的菌株高于20%不开裂,降解,分层,或失去导电性;此外,它们必须符合以不机械加固结构 11。之间存在使符合电极的不同的技术,手施加炭黑颗粒或碳油脂是两种最广泛使用的方法11。然而,这些方法具有相当多的缺点:应用手工防止装置的小型化S,导致非重复性的结果并且是费时。另外,碳粉末或润滑脂不会附着于膜和用这种方法生产的电极受到磨损和机械磨损。此外,在润滑脂的情况下,结合流体可扩散到电介质膜,并修改其机械性能。对未封装碳粉或油脂电极的寿命因此很短。这里,我们提出符合电极的图案形成通过冲压技术名为移印,其中精确的设计是通过软硅树脂印模转印到膜上,从而允许快速地和可重复性图案精确电极,使用特性下降到0.5毫米。所施加的溶液由炭黑在有机硅基质的混合物,其是交联的应用程序后,因此导致固化的电极具有较强的粘附到弹性体膜,这使得它们非常有弹性和耐机械磨损和磨损的。
以下协议描述了所有制造具有精确构图的标准电极快速,可靠DEAS所需的步骤。这包括膜铸造和预拉伸,图案及排列的电极,装配,电气连接和测试。用于视频的目的,我们制造了一个简单的平面内致动器与齿轮形电极, 如图2,致动器由一个薄的硅膜上拉伸的膜保持器,其上两个柔顺电极图案化的。的致动器帧然后被插入,以提供电接触的底电极。 图3示出了该组件的与致动器的不同部件的分解图。虽然实现了在视频中的装置具有超出演示DEAS的基本原理没有实际应用,不同致动器针对特定的应用已经进行了使用完全相同的过程中,如软爪,可调镜头,可调毫米波移相器等 。
研究方案
1.硅胶膜制作
- 牺牲层浇注
- 切割高品质125微米厚的PET从卷筒400毫米长片。
- 制备牺牲溶液(5%的聚丙烯酸的异丙醇以重量计):混合在一起32个克异丙醇和8g在50ml塑料管中的聚丙烯酸溶液(在水中25%)。摇匀。
- 清洁用浸渍有异丙醇不起毛擦布PET基板。
- 请用浸有异丙醇无尘擦拭布真空表。
- 打下真空表上的PET基材上,并打开真空泵上。
- 目视检查真空表,以确保没有大的灰尘颗粒在真空台和PET基底之间困住。重复上面的清洁步骤,如果灰尘颗粒被识别。
- 清洁用浸渍有异丙醇不起毛擦布PET基板的顶表面。
- 配置放置杆一pplicator对胶片自动涂布机和设定涂布速度至5mm /秒。
- 放2毫升牺牲层溶液中的简档杆的前面,并启动涂覆器的机器。
- 当轮廓杆已达到PET基材将其从涂布机的末端,用不起毛的抹浸泡在热水擦拭清洁。
- 缩回涂膜器,但离开真空泵运行了,并留下真空板的PET基材。让空气中的层干燥2分钟。
- 硅胶膜铸造
- 烤箱预热至80℃。
- 新增15克硅氧烷基和1.5g交联剂到混合锅。加入10克聚硅氧烷溶剂以降低粘度。
- 用行星式混合机混合硅氧烷混合物。使用2分钟混合循环以2,000rpm加一个2分钟脱气周期在2200转。
- 普遍施用器的高度为225微米。放置涂抹在PET片材的顶部,并设置吨他涂膜器速度至3毫米/秒。
- 传输15个ml的从混合锅中硅氧烷混合物上到用注射器PET基板。
- 启动自动施加器施加硅氧烷在整个PET制基板(图4A)。
- 关闭泵并等待5分钟,以让从铸造层的溶剂蒸发掉。
- 传输膜在玻璃板上并置于烘箱中30分钟,在80℃。
- 清洁涂抹和真空板浸渍异丙醇的无绒抹布。
- 30分钟后,从烘箱中取出膜,离开冷却在RT再5分钟并覆盖它的薄的PET箔,以保护表面免受污染。
2.释放弹性膜和预拉伸
- 预拉伸支持制造
- 切从干硅酮转移粘合剂的辊A4尺寸的矩形。
- 删除一个Of起干硅酮转移粘合剂的保护盖和手动应用粘合剂,在A4透明薄膜,注意避免气泡的应用过程中形成。
- 切预拉伸支护方式为使用计算机数控(CNC)激光雕刻机( 图4B),根据制造商的协议粘合剂覆盖的透明薄膜。
- 膜支撑制造
- 切500毫米×290毫米矩形干燥有机硅胶粘剂转移辊。
- 剥离1的从干硅酮转移粘合剂防护罩和层压箔到3毫米厚的聚(甲基丙烯酸甲酯)(PMMA)板。
- 在聚甲基丙烯酸甲酯帧,外径52毫米和44毫米的内径,将作为膜持有者切割环。
- 膜释放
- 切从第1步中投硅油膜/ PET基材三明治成圈55毫米直径ETER利用数控激光雕刻机(图4B),根据生产商的方案和剥离的保护膜。
- 固定激光切割预拉伸支持到切硅油膜圆粘合剂面朝下,使得粘合剂与所述硅树脂表面(图4C)接触。
- 准备的沸水浴淹没组件(硅油膜和胶粘剂支持)进去。
- 虽然淹没,轻缓地剥离PET基板远离硅氧烷膜(图4D)。
- 从水浴中取出硅膜,并让它在空气干燥或使用氮气枪来加速干燥过程。
- 膜厚度测量和预拉伸
- 测量该膜的具有根据制造商的协议的发送干涉仪的厚度。
- 所述prestretcher设置为一个直径为45mm,并放置prestr蚀刻支持硅膜担架上的手指,粘性的一面向下。
- 切担架手指( 图4E)的预拉伸的支持。
- 增加prestretcher的直径58.5毫米,以通过一个因子1.3(30%预拉伸)相等双轴预拉伸膜由prestretcher环形逆时针(图5)旋转。
- 除去从聚甲基丙烯酸甲酯膜支架露出粘合剂的覆盖膜和聚甲基丙烯酸甲酯膜保持器粘附在其预拉伸的膜表面(图4F)。
- 膜保持器周围切成从担架取出预拉伸的膜。
- 测量预拉伸的膜的最终厚度用透射干涉仪。
3.图案符合电极由移印
- 导电油墨制备
- 在125毫升的塑料搅拌机的容器中,放置0.8克炭黑W¯¯第i个16个克异丙醇和12毫米直径6的钢球。在行星式混合器混合以2,000rpm离心10分钟。
- 加4 G型硅橡胶A部分,将4g B部分,和16g异辛烷。在行星式混合器混合以2,000rpm离心10分钟。
- 移印机的设置
- 与磁性块(图4G)上的期望的电极图案安装老生常谈。
- 填充有导电硅酮系墨的inkcup。
- 放置在充墨inkcup顶部的老生常谈块(老生常谈固定在磁块上),并在该机器上安装组件。
- 固定在机器上的硅胶垫。
- 对准
- 放置对准板(图4H)上的打印机基。
- 启动一个打印周期的移印机上,这将适用于电极设计上根据制造商的协议的对准板。
- 目视检查印刷电极的重叠和对准板的刻蚀的参考结构。移动在xyθ台以校正任何不对准。
- 清洁正板和打印另一电极。
- 目视检查与参考结构中的对准,并继续移动台位置和印刷电极,直到获得关于参考结构(图4H)印刷的图案的完美重叠。
- 打印兼容电极
- 将打印机底部的预拉伸膜。
- 在移印机,推出了印刷周期,以杜绝在膜顶面( 图4I)的电极。邮票膜2次,以确保约4微米的足够的电极厚度。
- 从打印机上拆下膜,放置下预拉伸膜打印机底座并重复印刷过程,直到所有预拉伸纪念品branes都刻。
- 放置在烘箱冲压电极膜在80℃下进行30分钟。
- 30分钟后,从烘箱中取出膜。
- 将一个印刷膜打印机底座倒挂,使膜背面。
- 启动一个打印周期,以图案的底部电极。
- 从打印机底座取出膜,放置在打印机基准的下一个膜,并重复打印处理,直到所有的膜印在两侧。
- 放置在烤箱膜在80℃下30分钟交联的底部电极。
4.创建电气连接
- 切致动器的帧,将作为利用数控激光雕刻机保持框用于在用于膜保持器(CF 2.2)相同的PMMA板上的致动器。
- 剥离在致动器框架的顶部的粘合剂的背衬。
- 在致动器帧将与底部电极接触,并将其折叠到框架的侧面,以提供电接触(图3)的部分应用一个18毫米×2.5毫米的试片导电性带。
- 滑动膜保持器内的致动器框架,并轻轻按压用手指膜将其粘在致动器框的粘合剂。
- 用手术刀,切开膜的膜保持器和驱动器框架之间的边界,并删除了前者。
- 在顶电极的接触区施加第二片为18毫米×2.5毫米导电性带。
- 放置在每一块导电性带的线进行电连接。两条电线连接到一个高压源,以及适用的2千伏振幅的2赫兹的方波信号。观察到周期在装置扩张。
结果
硅胶膜铸造
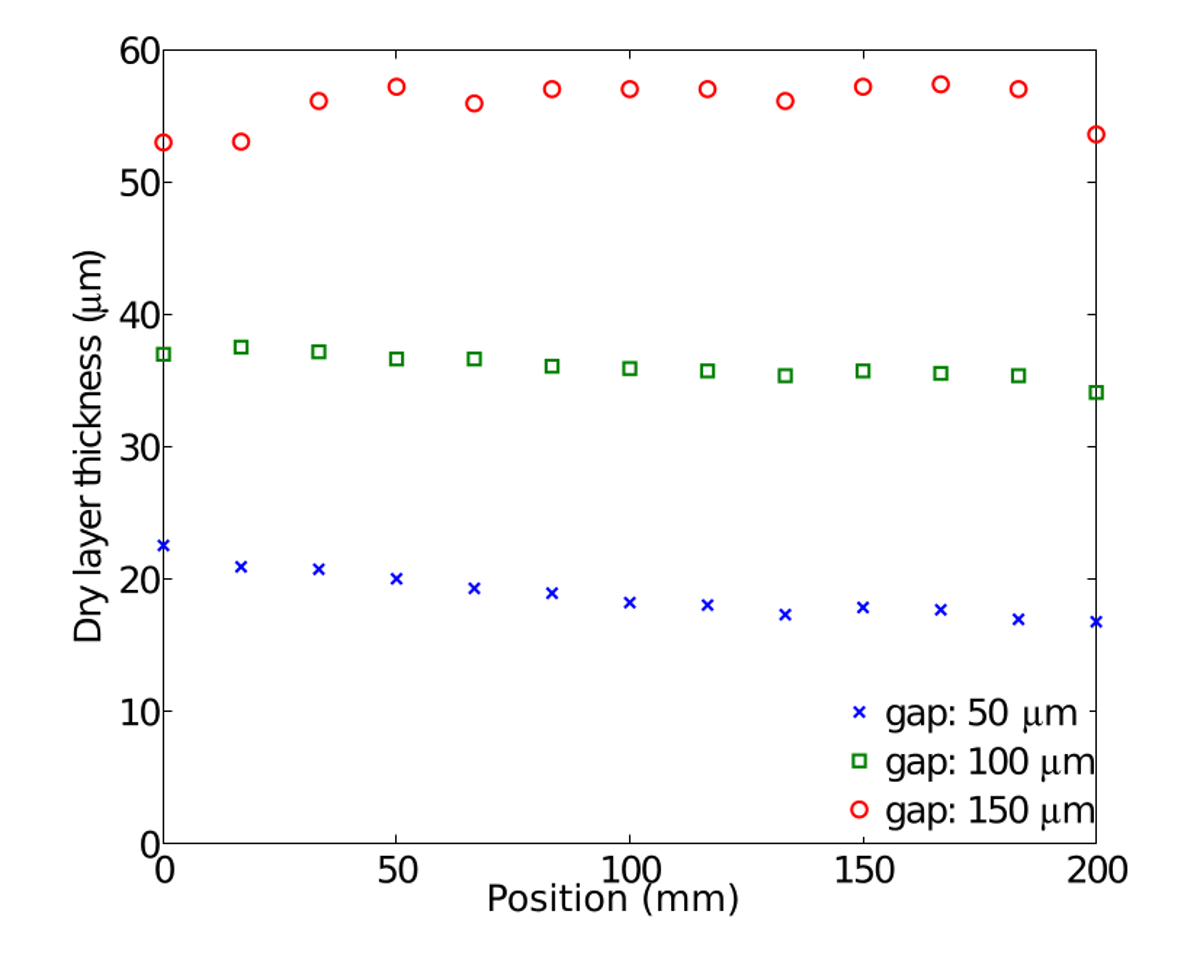
一旦硅膜释放从PET基材和是独立于一帧(在步骤2.2的末端),它们的厚度可以测量,例如通过传输干涉。 图6示出了硅层的厚度均匀性在整个宽度对于3个不同的有效间隙的高度(50,100和150微米)以1毫米/秒的铸造速度200毫米的PET基板(注意,由于涂抹比PET基板更宽,涂敷剩下的对脚真空而不是PET基材本身上, 如在图4A中可以看出的涂抹器与衬底之间的有效间隙,因此等于涂抹高度减去PET基材的厚度,例如在PET为125μm基材和的225微米的涂敷器的高度,如在该协议中使用,导致了100微米的有效间隙)。对于50微米的有效间隙的高度,有聚硅氧烷层的左侧和右侧之间的明确的高度差。这是因为涂布器的高度必须在左边和右边手动设置,并且有一些误差是不可避免的。然而与涂抹的精心设定,我们一般得到的膜具有小于1微米的厚度标准偏差,这对于100微米的有效间隙高度(σ= 0.81微米)的情况下。当涂抹器高度变得过大,起伏开始出现在膜上,引起在硅氧烷混合物中的溶剂的蒸发,因为是在投与的150微米(图6)的有效间隙的膜可见。
所得到的干燥膜厚度和涂布器高度之间的关系取决于硅氧烷混合物和铸造速度。本文中所使用的聚硅氧烷混合物由2份硅氧烷,和一种溶剂,以减少在viscosity混合物。作为溶剂,从固化前的膜中蒸发,膜厚度的估计值可以通过在硅氧烷混合物的固体的体积分数乘以有效间隙高度来获得。但是,也有在涂抹器的尾随的动态效果,导致建立一个弯月面的和更薄的厚度超过预期。间隙的高度和所得干燥膜厚度之间的关系取决于铸造速度,施加器的高度,并且由施加器的形状。 图7示出了膜浇铸以不同的速度和高度的实验的结果显示这些参数如何影响干膜厚度。由此可以看出,铸造以高速导致较薄的膜,以及该速度的效果变得更加显着的间隙高度增加。
启动性能
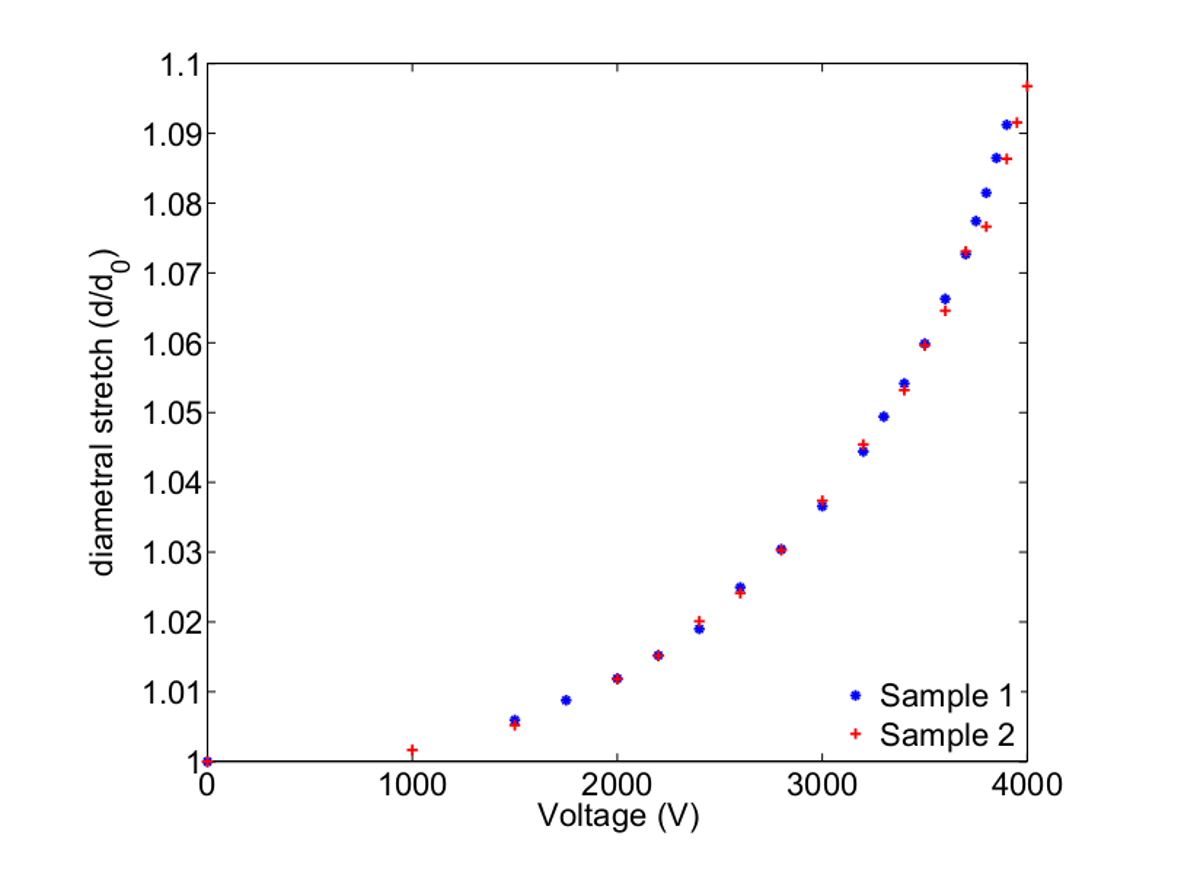
这里制造的致动器的特征在于,测量电荷兰国际集团的榫状电极的外径作为所施加电压的函数。上的固定支架的摄像机被用来取致动器的图像作为电压增加。的图像与图像处理脚本(视觉,美国国家仪器)分析以量化所述致动器的膨胀。这是通过拟合圆板状电极的嵌齿的外周(图8)进行。在从松弛状态的圆的直径的增加表示为径向伸展(即,致动直径由致动器时松弛的直径除以)。两个独立的相同厚度(34.5微米)的致动器的结果示于图8中 。这两种设备与径向伸展的10%,在4千伏的致动电压性能类似。
致动器的响应速度下通过施加3千伏2赫兹的方波信号,导致约4%的应变测定。在ACTU的扩张员的拍摄用高速摄像机0.25毫秒的时间分辨率。上升沿被抓获,200帧(50毫秒)的电压触发前,200帧之后。其中然后分析以提取取决于时间的变形的图( 图9)。上升时间(至达到90%的最终的变形所需要的时间)为3.75毫秒,而且没有观察到粘弹性蠕变之前和电压步骤后,不象当丙烯酸类弹性体被用作膜,为此,上升的时间所观察几百秒,通常观察到的12。
处理流程到其他设备中的应用
本文中所制造的致动器显示了我们的制造过程中,以及一个DEA的基本运作原理与增加施加电压的电极的表面面积,并且因此很好地说明本教程。但是,此执行器具有不超过展现着DEA的激励原则等具体目的。然而,这里提出的方法是非常通用的,可用于制造各种各样的软换能针对特定的应用程序。我们在座的应用,我们开发了基于驱动器的使用方法,提出了一个制造几个选定的案例。
软仿生可调镜头已制作( 图10A)。这些都是能够在不到200微秒9改变焦距20%。该装置可被致动的时间超过400万次循环而不在启动性能,这表明适当材料和良好的制造工艺的结合导致DEAS具有快速响应速度和长寿命明显减少。相似的几何形状的透镜,但使用广泛使用的商业的丙烯酸弹性体的VHB具有带宽幅度小的3个以上的命令作出 9。
构图兼容电极与移印允许制造非常精确地定义的电极,从而使独立的小型电极在相同的膜上的制造。例如,这是通过一个基于DEA旋转电动机,包括三个电独立电极(图10B)的制造中表现出来。在电机的中心轴线和检测质量可以旋转以1,500rpm 13。电机概念已被推进一步表明移印也可以产生可靠的致动器。一个自整流滚动机器人建成运行沿圆形轨道( 图10C)圈。机器人行驶超过25公里以15厘米/秒13的平均速度。
已生产的本程序(或轻微的变体)的其它应用包括可变形的细胞培养系统14,介电弹性体生成器 15,多段软爪16,或可调谐毫米波射频移相器17。

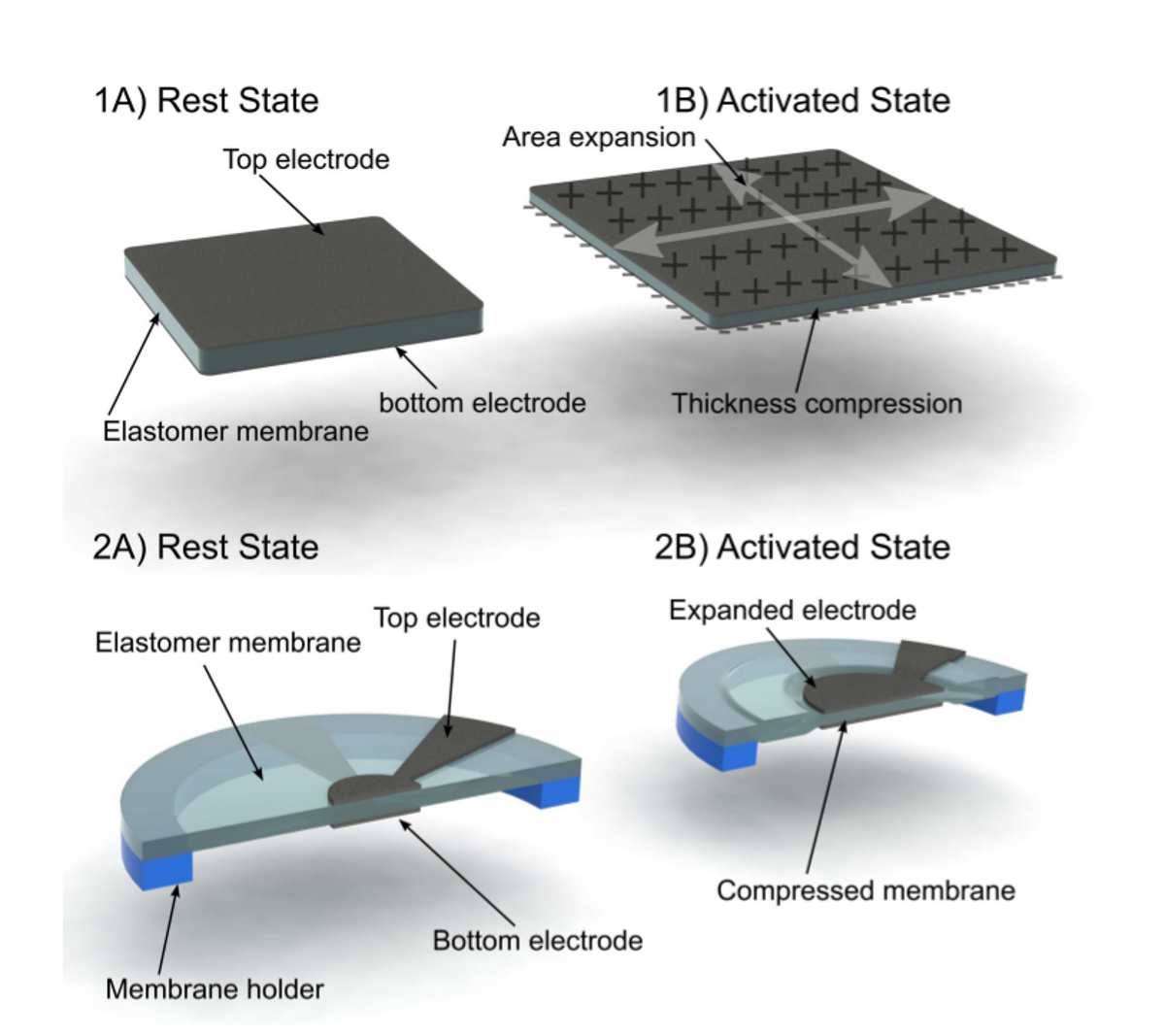
的介电弹性体致动器图 1.基本 原理顶:(1A)在其最简单的形式中,DEA是由一个软的弹性体膜两个柔顺电极夹着的。 (1B)当直流电压施加在电极之间时,静电电荷所带来的电极创建一个压缩应力是挤压膜,从而导致厚度减小和表面扩张。底部:(2A)在协议中所描述的致动器包括延伸在框架上的膜。圆形电极是在膜的任一侧与延伸到膜的边界,以允许电连接。活动AREA是区,在那里的两个电极重叠, 即,圆的中心。 (2B)当施加电压时,静电力压缩该膜。这将导致减少的膜厚度,在有源区的,并增加了电极的表面的。由于膜预拉伸,在电极周围的被动区放松以适应中央活动区的扩张。 请点击此处查看该图的放大版本。
{kind=link}

图2.演示致动器制造在这个协议中左:包含拉伸的硅氧烷膜固定在框架成品器件中,一对符合电极上图案化膜两侧的,并电连接。日GHT:复合图象示出静止状态(黑色)和激活状态(青色)。在结构的直径增加10%,与4千伏跨电极施加观察。 请点击此处查看该图的放大版本。
{kind=link}

图3.爆炸视图致动器的。形成在视频制造的致动器的不同的组件。膜保持器保留了预拉伸的硅油膜,并用于操纵期间电极印刷工序的膜。一旦电极被固化,致动器帧被插入在膜保持器内,并同时提供一个结构框架以保持致动器,和一个电触点的底部电极。一旦膜被固定到致动器支架,所述箱mbrane持有人可以被删除。 请点击此处查看该图的放大版本。
{kind=link}

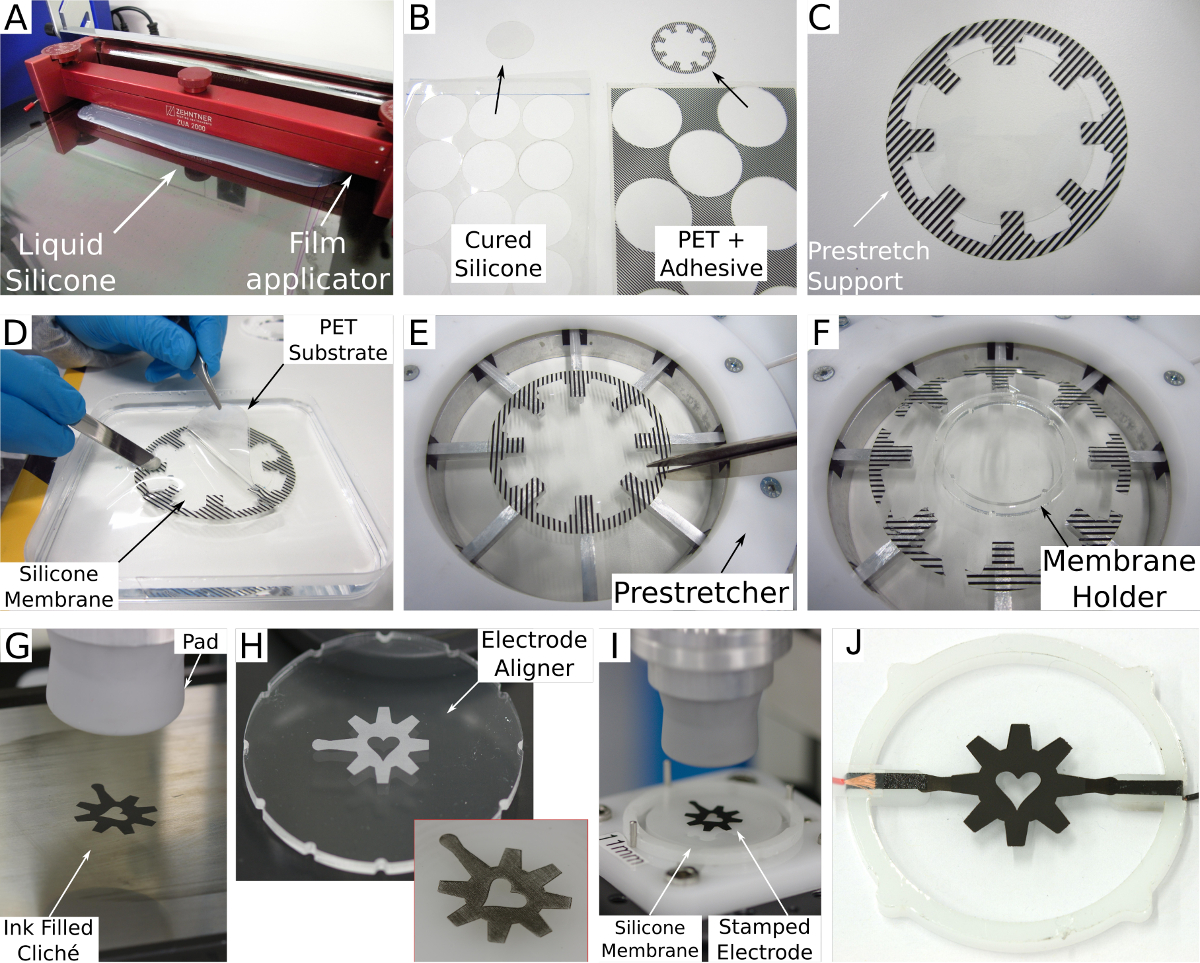
图4. 概述制造工艺的。使用自动薄膜涂布器涂布机硅氧烷膜(A)的铸造。固化硅膜和预拉伸支架(B)激光切割。 (C)有机硅膜的预拉伸支持配售。 (D)将PAA牺牲层在热水中的释放从PET基材硅氧烷膜。 (E)切割的预拉伸支持部分链接的手指。 (F)的预拉伸膜和保持器的膜表面的附着。 (G)的点化充满CONDuctive油墨。 (H)激光蚀刻电极对准,插图图显示例如一个良好的排列电极。( 我 )硅膜凭盖有电极。 (J)成品设备。 请点击此处查看该图的放大版本。
{kind=link}

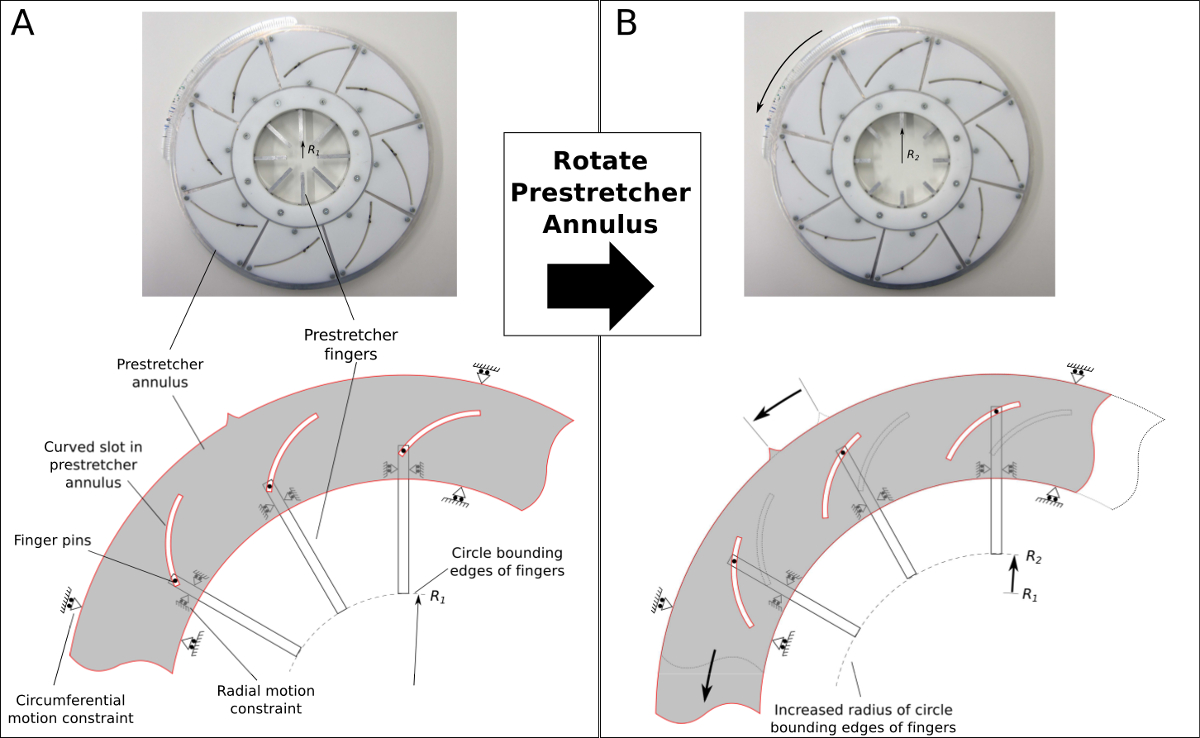
膜prestretcher的图5的工作原理。(A)中的几个金属指附着到塑料环和被限制在沿其长度的直链(径向)的方式移动。环面被约束为沿周向移动。塑料环带有几个弯曲加工成其槽,在其中手指的金属针驻留。圆包围的手指的边缘的半径为 R 1 。 ( 二)prestretcher环逆时针,手指同时平移旋转,增加了圆形边界手指的半径,R 1边缘,R 2。 请点击此处查看该图的放大版本。
{kind=link}

所述浇铸硅氧烷层的图6的厚度均匀性。在整个200毫米的PET衬底的宽度的固化的硅膜的厚度测量,对涂抹了三种不同的间隙设置。铸造速度为1毫米/秒。 请点击此处查看该图的放大版本。
{kind=link}

图7.干膜厚度为铸造参数的函数。干膜厚度获得不同涂布器高度和速度为硅氧烷溶剂混合物体积的62%的固体含量。较高的速度导致了更薄的薄膜平等敷贴设置,并随着膜厚速度增加的影响。 请点击此处查看该图的放大版本。
{kind=link}

图8.致动的验证机的,外面径向拉伸作为所施加电压的两个设备具有34.5微米的厚度(预拉伸后)的函数。约1直径的增加0%是在应用最高电压变化。 请点击此处查看该图的放大版本。
{kind=link}

图9.应变响应于电压阶跃输入 。方形,3千伏2赫兹信号被施加到装置,产生的约4%( 见图 8)的菌株。的区域扩展以每秒4000帧观察用高速照相机。整个过程不到4毫秒的执行机构要达到90%,其最终尺寸。前后过渡期后,执行器的尺寸保持稳定,并没有表现出粘弹性蠕变。 请点击此处查看该图的放大版本。
{kind=link}

图与所提出的处理流程做出10.介电弹性体致动器。通过下面的本文档中描述的方法制成介电弹性体致动器的三个例子。 ( 一)快速软调谐透镜能够改变,在不到200微秒其焦距了20%。 (二)旋弹性体微电机能够在旋转1500转的。 (三)自整流滚动机器人。 请点击此处查看该图的放大版本。
{kind=link}
讨论
制造过程可以总结如下。开始通过应用用于膜的铸件在PET基材上的水溶性牺牲层。这避免了在释放过程,可能会损坏膜过度变形。硅酮然后浇铸在一薄层并固化在烘箱中。在A4的PET片材与硅氧烷涂层切成55毫米直径的圆盘,并粘贴至柔性预拉伸支撑。为预支撑件用于在牺牲层释放并预拉伸步骤,以操纵所述膜。到从PET基板分离所述膜,它被浸在热水溶解牺牲层。这个过程让被释放的膜,而不必在上面拉显著。一旦膜被独立的,它可以被预拉伸。预拉伸在于机械拉伸面膜的夹持框架固定它。此步骤生成在在膜ternal拉力和是必要的面内介电弹性体致动器,如示范这里正在生产的。在该协议中,我们使用等双轴拉伸, 即平等的拉伸值,无论是在平面方向。然而,根据不同的应用,不同的预拉伸的配置都可以使用,如单轴(拉伸只沿x或y,而膜被允许在其他方向放松),或各向异性(沿x和y不同的值)。
一种技术称为凹版移印是用来精确地图案上的预拉伸的硅氧烷膜,这允许精确定义在膜毫米大小的电极的柔性电极。在此过程中,油墨被施加上一个老生常谈(的钢板在其上要打印的设计进行蚀刻,并随后拿起从老生常谈通过平滑硅氧烷印模被转移到膜13之前)刮刀。自从Ÿ设计都需要有自己的陈词滥调。这些可以从专业公司,它从几何的电子图纸生产它们进行排序。为了使具有伸缩性的导电电极,使用球磨,这是一种公知技术,打破炭黑的聚集体和均匀分散粉末在聚合物基质18,19分散炭黑在有机硅基质由剪切力。
打印时,重要的是在设计印有一个精确的定位,并相对定向到膜上帧。要做到这一点,使用精密XY-θ台和一个对准。对准是一块的PMMA在相同形状的膜框架,并具有蚀刻在使用一个数控激光雕刻其表面上的电极设计。印刷在膜之前,我们在对准板打印到检查对准。如果印刷图案不匹配的蚀刻设计我们调整在xyθ台,直到两个设计,可欣赏AP( 图4H)。在协议中,顶部和底部电极具有相同的设计,所以移印机可以原封不动的两个电极的应用程序之间。然而,在一些情况下,电极的几何形状是用于在顶部和底部电极不同。在这种情况下,当膜是在烤箱中顶电极的固化(即,步骤3.4.3和3.4.4之间),有必要除去老生常谈块(由老生常谈的组件保持在适当位置上的磁块)与来自移印机的墨水瓶。然后,安装的老生常谈必须为所述一个与底电极设计进行交换。因为老生常谈块已被移动,有必要进行使用对准板蚀刻所述第二电极的设计一个新的校准过程(步骤3.3)。一旦两个电极被施加,它们需要被连接到供给所述电荷˚F外部的驱动电路或驱动。有不同的解决方案用于制造柔性电极和驱动电子之间的电连接。这里,一个方法非常适合于原型示出,利用粘合剂覆盖的帧和导电带(图3)。批量生产,采用印刷电路板用铜焊盘接触电极是一个更好的选择(参见图10A为用市售的PCB制成的设备的一个例子)。
使用商用设备或产品的大部分的处理流程的步骤。两个例外是硅氧烷膜和预拉伸步骤的厚度的测量。为厚度的测量,使用自制的白色光透射干涉仪包括一个准直的白色光源(点尺寸<1毫米)穿过膜和由光谱仪收集的。的透射光强度的干涉条纹的周期作为一个复波长的nction用于计算膜20的厚度 。注意,其他方法可用于测量的厚度,但它们必须是非破坏性的,并且理想地接触,以避免变形,非常薄的膜。对于膜的预拉伸,使用自制的径向prestretcher,它由可径向移位8金属手指。以预拉伸的膜,手指向内移动,使得预拉伸支撑件可以粘贴到担架(图4E)的手指。到预拉伸膜,手指被向外移动,从而有效地增加了聚硅氧烷膜的直径,从而导致等双轴膜的预拉伸。八个手指被连接到一个环形,其旋转定义手指的径向分离(图5)。
具有高效率和成熟的处理流程,例如这里介绍是非常重要的以制备是坚固和可靠的可再现的设备。相比,购买预制备的薄膜,铸造薄弹性体膜赋予许多设计自由度,因为它允许选择和剪裁膜的应用程序的属性。例如,在硅氧烷弹性体的情况下,硬度和断裂伸长率可以通过选择的产品具有不同的链长度和交联密度来选择,并且该厚度可以通过调节铸造过程而变化。后者点允许例如选择最终的膜的厚度和预拉伸独立地,这是不可能的预制备的薄膜。
的能力以精确图案的电极上的小规模(厘米到亚毫米)也是DEAS一个重要的要求,因为大多数的设备包括在相同的膜上的有源和无源区。这意味着,电极形状,必须在该膜被精确限定。另外,作为电极必须在两侧施加膜,有必要对齐两个电极相对于彼此的:除了一个精确限定的形状,电极,还必须精确地定位在膜上。这里提出的冲压工艺满足这两个要求。此外,凹版移印是一个快速的过程,因为只需要几秒钟,需要以打印一个电极,和致动器可以很容易地批量处理采用这种方法。不像手动施加广泛使用的碳油脂或散粉电极,我们的方法会导致精确限定的电极即呈现出强的粘附性上它们所施加的膜。他们非常耐磨损,并且不能从膜13剥离。尽管事实上,凹版移印是一种接触方法,它可以用于应用墨水的薄和脆弱的有机硅膜,因为只有部分进来与膜接触是柔软的硅树脂印模。然而,有邮票和第之间一些不可避免的静摩擦ê膜,这将导致该膜的轻微变形,一旦印模移回向上。如果膜过薄,这可能会导致膜的破裂。这有效地限制了垫的印刷方法的应用,以膜厚度大于10微米。对于较薄的膜,非接触图案形成方法应被使用,如喷墨印刷。
虽然DEAS已经研究了超过15年,今天的大多数DEAS仍然基于现成的聚丙烯薄膜结合手工加润滑脂电极。这些手工制作方法已引起DEAS大多保持在实验室样机的状态,由行业采用有限,尽管DEAS的应变和功耗方面的有趣的表现。虽然可靠的制造工艺已经发表,它们涉及与专用自动设置21,22获得unprestretched,叠收缩致动器的制造。公关ocess流,我们在座的各位是一种多功能多用途的过程,描述了所有必要的,以制造DEA的重要步骤,它可以很容易地应用到适合定义的目标应用程序。
披露声明
The authors have nothing to disclose.
致谢
This work was partially funded by the Swiss National Science Foundation, grant 200020-153122. The authors wish to thank the member’s of our soft transducers group – past and present – for their contribution to the refining of our fabrication process flow.
材料
| Name | Company | Catalog Number | Comments |
| High quality PET substrate, 125 μm thick | DuPont Teijin | Melinex ST-506 | low surface roughness and absence of defects |
| Isopropanol 99.9% | Droguerie Schneitter | ||
| Poly(acylic acid) solution (25%) | Chemie Brunschwig | 00627-50 | Mw=50 kDa |
| Automatic film applicator | Zehntner | ZAA 2300 | with vacuum table |
| Profile rod applicator | Zehntner | ACC378.022 | 22.86 μm |
| Oven | Binder | FD 115 | |
| Dow Corning Sygard 186 silicone kit | Dow Corning | Sylgard 186 | silicone used for casting membranes |
| Dow Corning OS-2 silicone solvent | Dow Corning | OS2 | environmentally-friendly solvent. Mixture of 65% Hexamethyldisiloxane and 35% Octamethyltrisiloxane |
| Thinky planetary mixer | Thinky | ARE-250 | |
| container PE-HD 150 ml | Semadeni | 1972 | Container to mix the silicone for the membrane |
| Medical grade 125 ml PP wide mouth jar with cap | Thinky | 250-UM125ML | Container to mix the ink |
| Bearing-Quality steel balls 12 mm | McMaster-Carr | 9292K49 | |
| Universal applicator with adjustable gap | Zehntner | ZUA 2000.220 | |
| Transparency film for overhead projector | Lyreco | 978.758 | |
| Dry silicone transfer adhesive (roll) | Adhesive Research | Arclear 8932 | |
| poly(methyl methacrylate) plate 500 mm x 290 mm x 3 mm | Laumat | Plexi 3mm | |
| Prestretching rig | "home made" | ||
| USB spectrometer for visible light | Ocean Optics | USB4000-VIS-NIR | Spectrometer for the thickness measurement |
| Tungsten halogen white light source | Ocean Optics | LS-1 | Light source for the thickness measurement |
| 400 micrometer optical fiber | Ocean Optics | QP400-2-VIS-NIR | Optical fiber on the spectrometer side for the thickness measurement |
| 600 micrometer optical fiber | Ocean Optics | P600-2-VIS-NIR | Optical fiber on the light source side for the thickness measurement |
| Carbon black | Cabot | Black Pearl 2000 | |
| Silicone Nusil MED-4901 | Nusil | MED-4901 | silicone used in conductive ink |
| Pad-printing machine | TecaPrint | TCM-101 | |
| Thin steel cliché 100 mm x 200 mm | TecaPrint | E052 100 200 | Steel plate etched with the design you need to print. The etching is performed by the company selling the cliché. |
| 96 mm inkcup | TecaPrint | 895103 | Component of the pad printing machine in which the ink is contained |
| Soft silicone 30 mm printing pad | TecaPrint | T-1013 | Printing pad for the pad printing machine |
| 60 W CO2 Laser engraving machine | Trotec | Speedy 300 | To cut frames and foils |
| Carbon conductive tape | SPI supplies | 05081-AB | For electrical connections to the electrodes |
| 4 channels 5 kV EAP controller | Biomimetics laboratory | low power high voltage source to test the actuators. http://www.uniservices.co.nz/research/centres-of-expertise/biomimetics-lab/eap-controller |
参考文献
- Pelrine, R., Kornbluh, R., Pei, Q., Joseph, J. High-speed electrically actuated elastomers with strain greater then 100%. Science. 287 (5454), 836-839 (2000).
- Keplinger, C., Li, T., Baumgartner, R., Suo, Z., Bauer, S. Harnessing snap-through instability in soft dielectrics to achieve giant voltage-triggered deformation. Soft Matter. 8 (2), 285-288 (2012).
- Böse, H., Fuss, E. Novel dielectric elastomer sensors for compression load detection. Proc. of SPIE. 9056, 905614 (2014).
- Koh, S., Keplinger, C., Li, T., Bauer, S., Suo, S. Dielectric Elastomer Generators: How Much Energy Can Be Converted?. IEEE. ASME. Trans. Mechatron. 16 (1), 33-41 (2012).
- Carpi, F., Frediani, G., Turco, S., De Rossi, D. Bioinspired Tunable Lens with Muscle-Like Electroactive Elastomers. Adv. Funct. Mater. 21 (21), 4152-4158 (2011).
- Anderson, I., et al. A thin membrane artificial muscle rotary motor. Appl. Phys. A Mater. Sci. Process. 98 (1), 75-83 (2010).
- Akbari, S., Shea, H. R. An array of 100um x 100um dielectric elastomer actuators with 80% strain for tissue engineering applications. Sens. Actuators A-Phys. 186, 236-241 (2012).
- Jordi, C., et al. Large planar dielectric elastomer actuators for fish-like propulsion of an airship. Proc. SPIE. 7642, 764223 (2010).
- Maffli, L., Rosset, S., Ghilardi, M., Carpi, F., Shea, H. Ultrafast all-polymer electrically tuneable silicone lenses. Adv. Funct. Mater. 25 (11), (2015).
- Rosset, S., Maffli, L., Houis, S., Shea, H. R. An instrument to obtain the correct biaxial hyperelastic parameters of silicones for accurate DEA modeling. Proc. SPIE. 9056, 90560M (2014).
- Rosset, S., Shea, H. R. Flexible and stretchable electrodes for dielectric elastomer actuators. Appl. Phys. A Mater. Sci. Process. 110 (2), 281-307 (2013).
- Rosset, S., O’Brien, B., Gisby, T., Xu, D., Shea, H. R., Anderson, A. Self-sensing dielectric elastomer actuators in closed-loop operation. Smart Mater. Struct. 22 (10), 104018 (2013).
- Rosset, S., Shea, H. Towards fast, reliable, and manufacturable DEAs: miniaturized motor and Rupert the rolling robot. Proc. SPIE. 9430, (2015).
- Poulin, A., Rosset, S., Shea, H. Toward compression of small cell population: Harnessing stress in passive regions of dielectric elastomer actuators. Proc. SPIE. 9056, 90561Q (2014).
- McKay, T., Rosset, S., Anderson, I., Shea, H. Dielectric elastomer generators that stack up. Smart Mater. Struct. 24 (1), 015014 (2015).
- Araromi, A., et al. Rollable Multisegment Dielectric Elastomer Minimum Energy Structures for a Deployable Microsatellite Gripper. IEEE. ASME. Trans. Mechatron. 20 (1), 438 (2015).
- Romano, P., Araromi, O., Rosset, S., Shea, H., Perruisseau-Carrier, J. Tunable millimeter-wave phase shifter based on dielectric elastomer actuation. Appl. Phys. Lett. 104 (2), 024104 (2014).
- Awasthi, K., Kamalakaran, R., Singh, A., Srivastava, O. Ball-milled carbon and hydrogen storage. Int. J. Hydrogen Energy. 27 (4), 425-432 (2002).
- Leong, C. K., Chung, D. Carbon black dispersions as thermal pastes that surpass solder in providing high thermal contact conductance. Carbon. 41 (13), 2459-2469 (2003).
- . Transmission Measurements of Polymer Thin Films. Ocean Optics application note. , (2014).
- Lotz, P., Matysek, M., Schlaak, H. Fabrication and application of miniaturized dielectric elastomer stack actuators. IEEE. ASME. Trans. Mechatron. 16 (1), 58-66 (2011).
- Tepel, D., Hoffstadt, T., Maas, J. Automated manufacturing process for DEAP stack-actuators. Proc. SPIE. 9056, 905627 (2014).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。