Method Article
表面肌电图生物反馈作为全球胸腺丛损伤患者接受仿生重建的康复工具
摘要
全球胸腺丛损伤患者仿生重建后的最佳功能结果取决于结构化的康复方案。表面电学引导训练可以改善EMG信号的振幅、分离和一致性,在选择截肢无功能手后,控制并驱动假肢。
摘要
在患有全球胸腺丛损伤和缺乏生物治疗替代品的患者中,仿生重建,包括无功能手的选择性截肢和假肢的置换,最近被描述。最佳的假肢功能取决于结构化的康复方案,因为患者手臂的残余肌肉活动后来转化为假肢功能。表面肌图(sEMG)生物反馈在中风后康复期间一直使用,但迄今尚未用于复杂外周神经损伤患者。在这里,我们介绍我们的康复方案实施于全球胸腺丛损伤患者适合仿生重建,从识别sEMG信号到最终的假肢训练。这个结构化的康复计划促进运动再学习,这可能是一个认知衰弱的过程后,复杂的神经根外伤,异常的再内伤和解剖外重建(如神经转移的情况手术)。使用sEMG生物反馈的康复方案有助于建立新的运动模式,因为患者正在意识到目标肌肉的再内化过程。此外,微弱的信号也可以训练和改进使用sEMG生物反馈,使临床上"无用的"肌肉(显示肌肉力量M1在英国医学研究委员会[BMRC]规模)符合灵巧的假手控制。此外,本文还介绍了仿生重建成功后的功能结果评分。
引言
全球胸膜丛损伤,包括脊髓神经根的创伤性外部外伤,是人体最严重的神经损伤之一,通常影响生命黄金时期的年轻、健康患者1、2.根据神经根的发源量,完全上肢瘫痪可能会随之而来,因为从大脑到手臂和手的神经连接被打乱。传统上,神经根的外在与不良结果3有关。随着显微外科神经技术在过去几十年中逐渐普及,手术效果得到了提高,肩部和肘部的有用运动功能通常恢复4,5。手内内在肌肉,最不分,通常经历脂肪退化,导致不可逆转的萎缩,再生斧头可能达到它6。对于这种情况仿生重建,包括选择截肢无功能的"丛"手和它的替代与机电一体化的手,已描述7,8。患者前臂的剩余肌肉活动,可能是临床上微不足道的(等轴收缩,英国医学研究委员会 [BMRC] 规模的 M1),从传皮电极接收,感应肌电图活动,这是然后翻译成假肢手9的各种运动。
初始咨询时可能有足够的表面电表 (sEMG) 信号。然而,在某些情况下,需要建立额外的信号执行选择性神经和肌肉转移7。在这两种情况下,都需要一个结构化的康复协议,以确保sEMG信号一致性和随后的最佳假肢功能在过程结束时。继神经根外阴和异常再内伤以及神经转移手术后,一个主要的挑战是建立新的运动模式,以允许对目标肌肉进行意志控制。sEMG生物反馈方法已广泛应用于中风10的康复中。此方法允许直接可视化肌肉活动,否则将不被注意到由于肌肉无力和/或拮抗剂的共同激活。因此,它鼓励患者训练他们虚弱的肌肉,同时提供准确的反馈,正确执行运动任务11。
在最近的一份出版物中,我们首次表明sEMG生物反馈也可用于复杂外周神经损伤的康复12。我们认为,sEMG生物反馈是一种非常有用的方法,使患者意识到神经转移手术后推进的再内化过程。此外,微弱的肌肉活动,以前对患者没有用,可以训练和加强以后使用sEMG生物反馈的假肢控制,这允许临床和患者具体可视化否则被忽视的肌肉活动.因此,培训进度可以很好地理解和记录。此外,使用对肌肉活动的直接反馈,使临床医生能够将各种运动命令与相关的信号振幅和一致性相关联,从而建立最佳的运动策略,以便将来实现强大的假肢控制。总之,这种方法的目的是通过增加患者对SEMG信号的理解、认识和控制来促进康复过程,后者稍后将驱动假肢。
研究方案
这一康复协议的临床实施得到了奥地利维也纳医科大学伦理委员会(道德投票号:1009/2014)的批准,并按照《赫尔辛基宣言》规定的标准执行。所有患者均提供书面知情同意参加本研究。
注:Aszmann等人7和Hruby等人的先前出版物有8、13篇,非常详细地描述了仿生重建的概念、治疗算法和心理社会先决条件。材料表参考了拟议的康复协议中使用的所有材料和设备。
1. 初步咨询时的患者评估
- 对于患者评估、康复和培训的所有步骤,请找到一个办公室或检查室,患者独自在安静的氛围中,没有干扰。确保有足够的空间来检查患者并设置sEMG生物反馈系统。
- 从患者那里获得详细的病例史,包括损伤机制和第一次护理、以前神经修复手术的报告以及日常生活中的主观残疾。
- 只考虑患者仿生重建与失败的生物治疗替代(即,神经修复,神经转移,二次重建导致徒劳的上肢功能)。排除中枢神经系统同时受损、受影响肢体不稳定骨折、未经治疗和/或有复原力的心理健康问题、吸毒成瘾、缺乏遵守和坚持长期康复的承诺的患者程序。
- 对当前上肢功能进行详细的临床检查。使用 BMRC 分级表临床评估受影响手臂和手部所有主要肌肉的功能。
- 由重建外科医生、整形外科医生、理疗师、心理学家和物理治疗师组成的多学科团队评估生物治疗方案是否可行。向患者解释,电热假体的功能与生物手的功能是无可比拟的。
- 询问患者关于仿生重建的主题和观点(参见以前的出版物13,包括与心理学家的结构化访谈,以评估患者在心理上是否适合进行仿生过程重建)。
- 评估Tinel符号是否可以沿着主要外周神经的神经轴引起,表明存在适合神经转移手术的可行轴xon。
- 除了患者评估,还模糊地勾勒出整个过程的可能时间表,这取决于可检测 EMG 信号的可用性。如果表示其他干预措施,如心理支持、姿势训练和/或加强剩余肌肉,则尽快启动。
2. sEMG 信号的识别
- 在安静的房间的桌子上建立sEMG生物反馈系统。这可以是独立设备,也可以是连接到计算机的设备。如果使用计算机,请插入所有电缆并将 EMG 设备与计算机连接,并在计算机上启动相应的软件。
- 为了减少阻抗,请仔细剃须各自的身体部位和/或用剥离凝胶或湿纸巾轻轻去除死皮细胞,为患者的皮肤做好准备。
- 稍后向患者解释 EMG 设备和相关计算机软件的功能。
- 将患者置于计算机屏幕前面。
- 要求患者思考手部运动,同时尝试收缩旨在执行特定动作的肌肉(如伸展手腕、制作拳头、弯曲拇指等),即使这不会导致其功能无功能的实际运动手。为(虚弱的)肌肉收缩而绞住他/她的前臂。
- 在确切的皮肤位置放置一个sEMG电极,在要求患者考虑伸展手腕和手指时,肌肉收缩可以通过手指进行触手,例如,在背扩张室5厘米远至肘关节上。
注:虽然可以使用湿电极和干电极检测sEMG活性,但干燥电极准备进行测试,因为这些电极可以很容易地在皮肤上移动,以检查最佳位置。 - 重复之前使用的运动命令(即手腕和手指的延伸),以引起肌肉收缩。
- 观察计算机屏幕上的 EMG 信号,并在患者尝试收缩旨在执行特定动作的肌肉(即伸展手腕和手指)时,振幅是否持续增加。
- 如果振幅不够高(小于背景噪声12的 2⁄3 倍)或信号不一致,请尝试具有相同电极位置的其他电机命令,看看是否可以获得更高的振幅。
- 对不同的肌肉或肌肉群重复此过程。例如,将 sEMG 电极移到前臂的 volar 方面,将其放在前臂的肌肉上,并要求患者尝试前臂。观察计算机屏幕上的信号,并在患者想到此运动时,查看振幅是否反复增加。
注:在一些患者中,肌肉活动没有明显。在这里,应将三个或更多 sEMG 电极放置在前臂的 volar、背和径向方面,并应尝试各种电机命令,密切监测所有信号的振幅变化,即使电极定位发生细微变化(参见图 1。

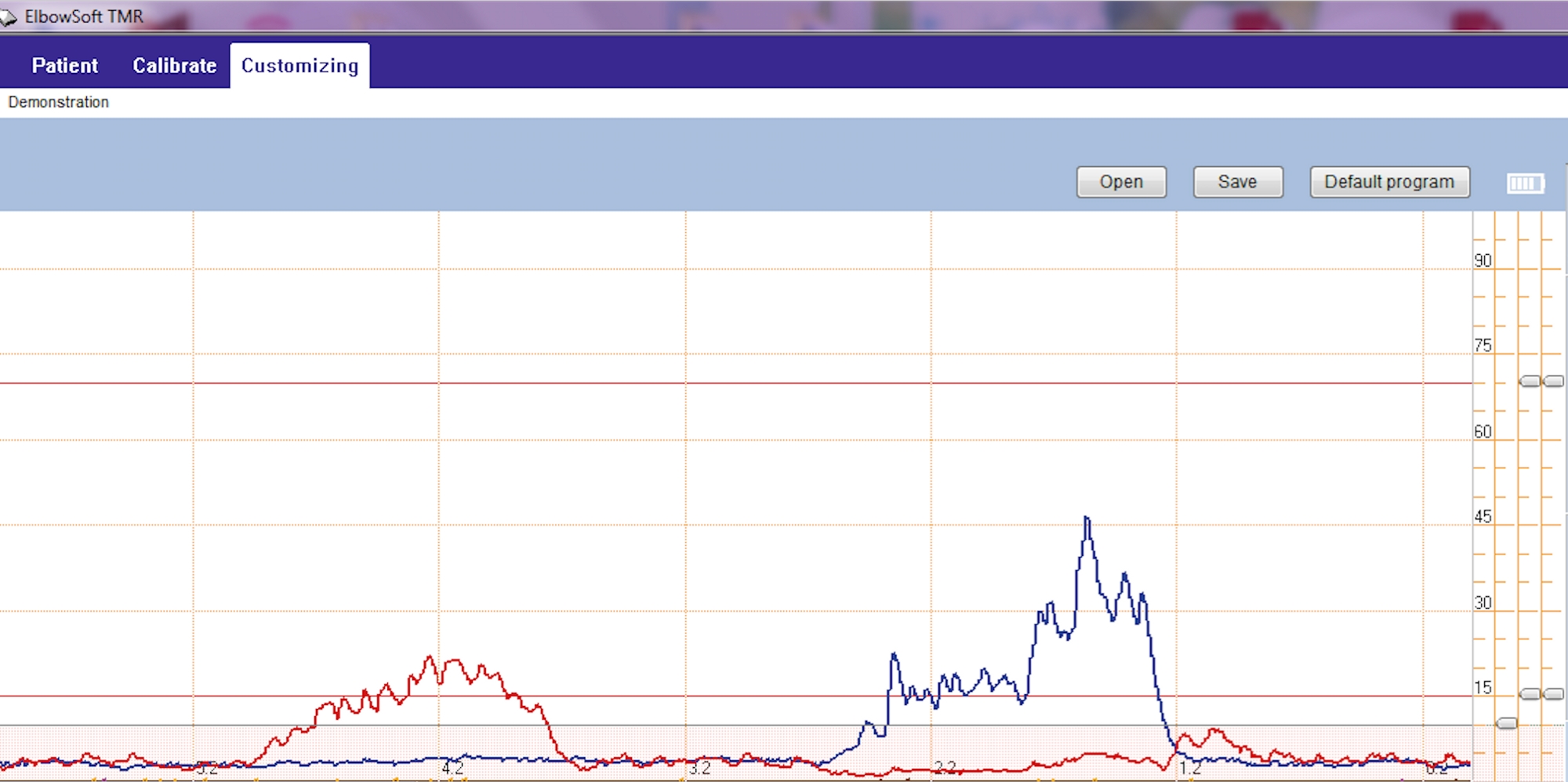
图 1:计算机屏幕上 EMG 信号的屏幕截图。
为了识别EMG活性,可以将两个或两个以上的电极放在病人的前臂上,要求他/她尝试各种运动。在此特定情况下,当患者试图合上手时,前臂的volar方面的电极会感应EMG活动,如计算机屏幕上显示的第一个红波所反映的。此患者的信号分离是令人满意的,因为蓝色信号,对应于放置在前臂背部的第二电极,没有达到阈值。当患者考虑打开手时,蓝色信号的振幅超过阈值,而红色信号几乎保持非活动状态。请点击此处查看此图的较大版本。
{kind=link}
- 也尝试运动命令和电极位置,不同于"正常"解剖作为异常的再内和解剖外重建,因为在神经转移已经改变了神经输入部分变性肌肉。
- 如果前臂未发现肌肉活动,则对上臂和肩带重复该过程。
注:在某些患者中,未找到sEMG信号。在这些,神经和肌肉转移需要执行建立新的EMG信号位点(详细的手术概念可能在其他地方发现7),延迟信号训练6-9个月。对于灵巧的假手控制,至少需要两个可分离的 EMG 信号。
3. sEMG 制导信号训练
注:sEMG引导信号训练的培训课程不应超过30分钟,因为这可能导致肌肉疲劳,从而阻碍运动学习的成功。所述步骤需要长时间重复,以确保以后所需的良好的神经肌肉协调,以便进行可靠的假肢控制。
- 一旦识别了两个或多个 EMG 信号,鼓励患者交替激活它们(参见图 2 A)。为了可靠地驱动假肢,需要控制独立的 EMG 信号,不受干扰。
- 独立调整每个信号的电压增益,在训练期间实现所有信号的类似振幅阈值,使患者更容易进行信号分离和理解。
- 重复并解释给病人的假手的力学:轻微的肌肉收缩最终会导致信号分离的改善,必须优先于肌肉力量,即信号的振幅。

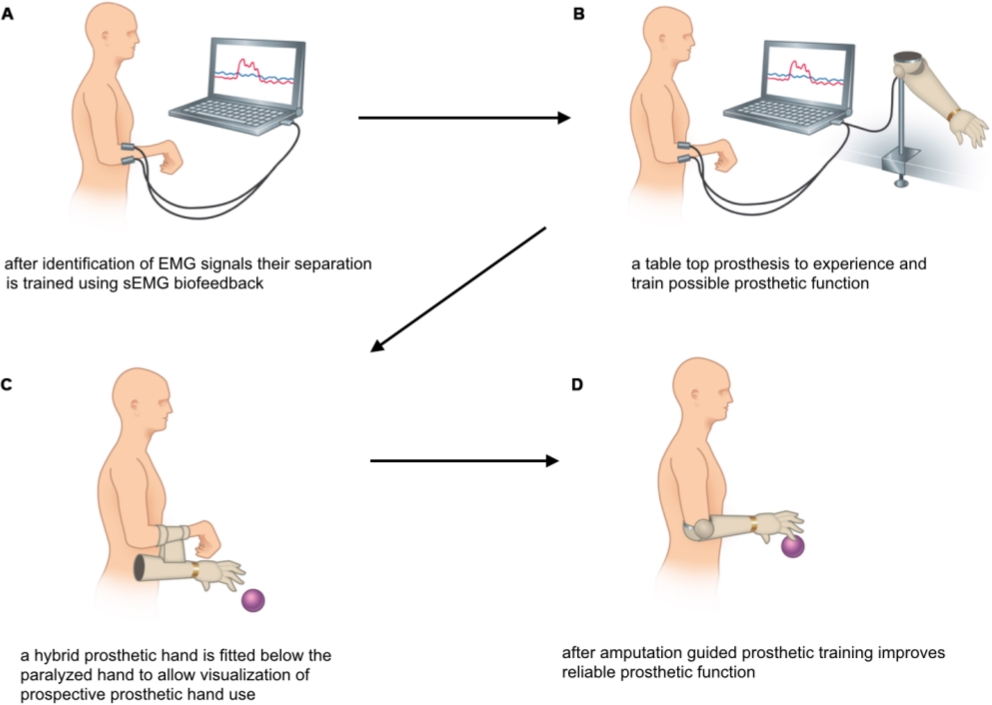
图2:sEMG指导的仿生手重建患者康复。
(A) 通过直接可视化肌肉活动,可以尝试各种运动命令来识别特定目标肌肉上的最高 EMG 振幅,并可以比较不同的信号位置。(B) 使用桌面假肢,患者手臂的EMG活动直接转化为假肢功能。(C) 安装混合假手可使病人能够想象和理解未来的假手使用。(D) 假肢重建后,EMG信号可以通过sEMG生物反馈或假肢本身进行训练和优化。这个数字已由Sturma等人12修改,并经神经科学前沿许可转载。请点击此处查看此图的较大版本。
{kind=link}
- 观察计算机屏幕上的 EMG 信号,使患者在尝试特定运动时知道两个信号是否共同激活。向患者解释,在尝试一个特定操作期间,两个信号不应共同激活,因为每个 EMG 信号都与特定的假肢操作相关联。因此,共同激活的信号不会导致患者需要的行动。
- 指导患者尝试不同的(轻微)运动,并观察在信号分离方面,哪些精确的运动模式是最好的。鼓励患者训练这些动作。
- 让患者知道,在训练开始时,完美的信号分离不太可能,但会随着大量重复而改善。
注意:允许放松阶段,因为肌肉力量可能下降更快,在复杂的神经损伤和微弱的肌活性的患者。 - 通过提高信号一致性,指示患者产生更高的信号振幅,以进一步加强肌肉及其信号。
- 通过一致的 EMG 信号分离和固体控制,安装连接到相应 EMG 软件的桌面假肢和放置在患者前臂/手臂上的电极。这将直接将EMG活动转化为机械假肢功能(参见图2B和图3)。

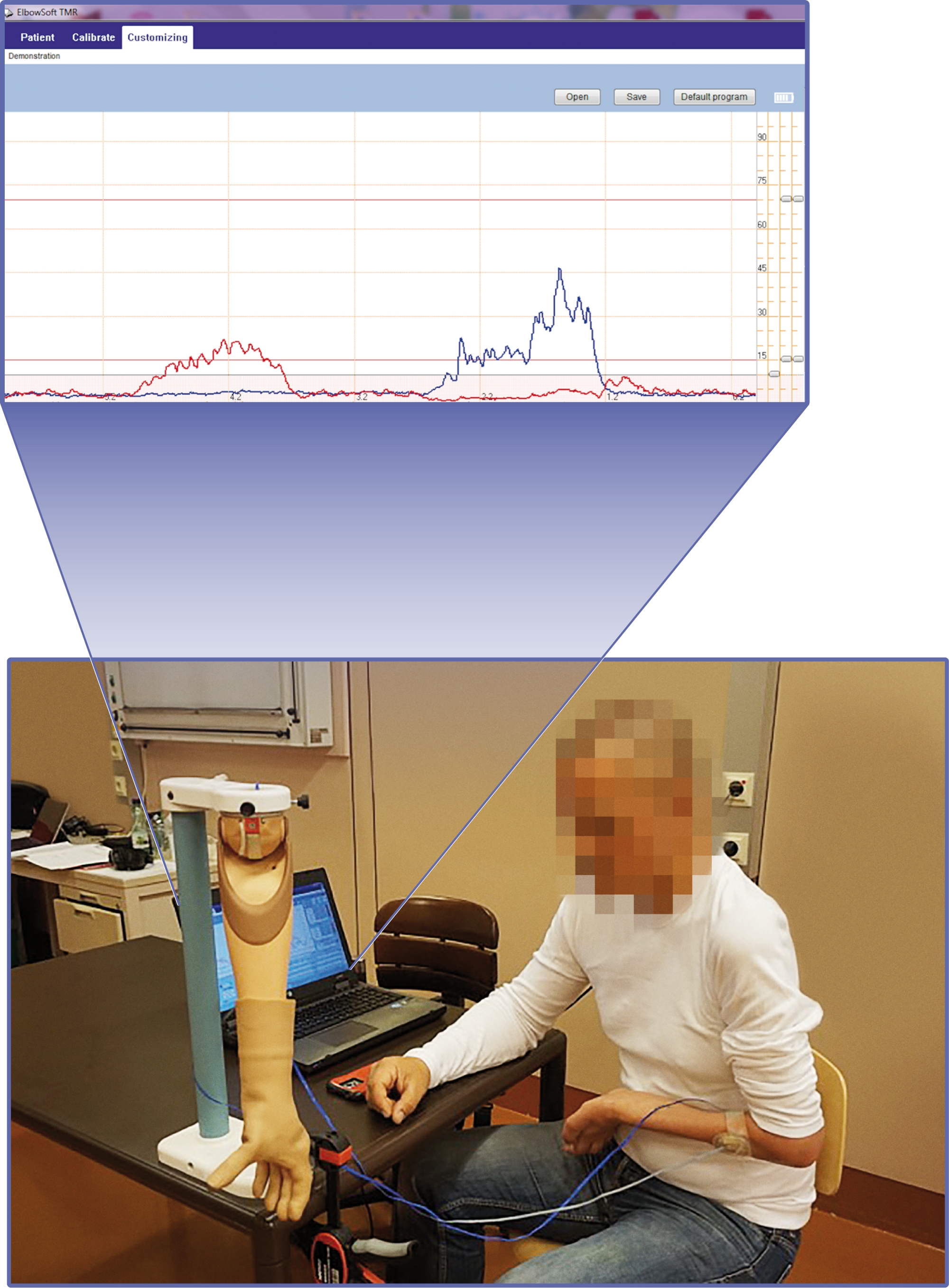
图3:患者在台顶假肢前,在电脑屏幕上截图他的两个信号。
在患者的前臂上,两个电极感应EMG活性。这两个信号在计算机屏幕上显示为彩色编码图形(红色和蓝色),并同时转换为假肢运动,使患者能够理解信号质量和假肢控制之间的关系。请点击此处查看此图的较大版本。
{kind=link}
- 教育患者使用直接控制的肌电假肢使用一个电极的输入(即从一个电极检测到的肌肉活动)来控制一个假肢运动。
- 在选择按比例控制运动速度的设备的情况下,让患者了解计算机屏幕上信号的外观(主要是振幅高度)与假肢运动的速度/强度之间的相关性。
注:根据可用的 EMG 信号数和最终假肢装置的自由度,可能需要使用方法来在这些自由度之间切换。一种常用的在自由度之间切换的方法(例如,手开/接近前列腺/结语)是通过两个肌肉同时收缩,也称为共收缩14。 - 训练共收缩。让患者观察计算机屏幕和假肢上的 EMG 信号。如果假肢装置不移动,即在共收缩期间打开/关闭,则患者操作正确。
4. 混合手安装和假肢训练
- 标记患者皮肤上的电极位置,这些位置被定义为可靠假肢控制的最佳位置,让骨科技师制造具有这些精确电极位置设计的初步假肢插座。
- 将带有单独定制插座的混合假肢手安装在无功能"丛"手上或下方(见图2C)。
- 同时运行EMG软件程序,使患者知道他/她的行动。
- 交替训练不同的假肢运动。电极也可以放置在沿上臂和肩带的相邻肌肉上,以避免无意识的共收缩,这将导致整个上肢疲劳,增加磨损时间。
- 从简单的假肢运动开始(只打开/关闭手,没有任何共收缩),支持假肢装置的重量。
- 在不同的手臂位置进行简单的假肢运动,例如肘部交替伸展或弯曲。在调整各种臂部位置并训练所有位置的信号一致性时,使患者了解信号差异。
注意:自发神经再生后,不同肌肉或肌肉群意外共同激活后,经常发生由于异常的再内侧,这可能妨碍协调运动和禁用足够的肌肉活动15。移动手臂时,通常会发生微弱的意外肌肉收缩,由 sEMG 传感器感应并转化为假肢运动。这可能导致假肢控制不良,如果在使用EMG训练和肌肉增强的康复过程中没有充分解决,如下所述。 - 在不同手臂位置进行繁琐的假肢控制时,请彻底观察计算机屏幕上的 EMG 信号,并指向患者,在一个或多个肌肉意外收缩的臂位置导致信号偏移。在患者仍可处理的位置训练 EMG 信号的精确激活,并随着时间的推移缓慢地改变手臂位置。
- 如果在抬起手臂时观察到用于假肢控制的肌肉的共同激活,则对肘部屈肌(以及肩部肌肉,如果适用)进行力量训练。向患者解释,更强壮的肌肉(即,在简单的提升任务中不能与其最大自愿力一起工作的肌肉)通常也有助于更好地分离信号。如果上肢肌肉太弱,无法在三维空间内移动假肢装置和/或稳定肩部,则还要进行力量训练。
- 继续执行简单的抓取任务,例如拾取小盒子和操作小对象(参见图 2C)。
- 最后,训练简单的日常生活任务,如打开门,折叠毛巾或打开瓶子。
注意:许多任务可能会受到限制,因为瘫痪的手会妨碍,而且设备可能会感觉相当重,因为除了混合假肢手之外,患者必须举起自己手的重量。
- 如果信号质量不足,则返回计算机屏幕上进行信号训练可能是有益的。在所有任务中,特别寻找计算机屏幕上的信号共同激活,并进一步提高信号独立性。
- 使用混合假肢评估上肢功能,并记录测试结果的视频。此外,对瘫痪的手使用相同的评估,以记录从无功能手的假肢更换预期功能的好处。
5. 选择性截肢和假肢置换
- 根据由患者的理疗师/EMG 培训师、负责的外科医生组成的多学科团队中的各种 EMG 信号(跨径、跨月经或,在极少数情况下,是格莱诺胡美尔)的部位,精确规划截肢水平截肢和熟悉病人期望的心理学家。
- 询问患者是否对计划截肢有任何未决问题,并明确告知在截肢前的任何时候可以撤销这一决定,否则将导致不可逆转和改变生命的手术。
- 使用无功能手和视频磁带对上肢功能进行标准化评估,并录下结果
- 使用混合假肢手和视频磁带对上肢功能进行标准化评估,以记录未来假肢安装的好处。
- 如前文所述,对无功能肢体进行选择性截肢。
- 允许术后伤口愈合,让患者训练相邻的关节,以改善上肢的流动性。4~6周后,如上文所述,训练EMG信号,并定义电极位置的最佳热点。
注:这些电极位置和马达命令可能与截肢前的位置略有不同。 - 让骨科技术人员使用先前定义的 EMG 电极位置设计最终的假肢插座(参见图 4,说明其中一名患者可能采用的插座设计)。
注:虽然没有推荐特定的插座设计,但电极的确切位置及其与树桩皮肤的粘附度至关重要,因为胸腺丛患者的神经肌肉界面大大减少。

图 4:可能的假肢和套接字设计示例。
(A) 这个病人的假肢由碳制成的外护套组成.(B) 患者宁愿使用开结的钩子作为抓握工具,而不是假手。(C,D)两个电极集成在假肢中。患者佩戴硅胶衬垫,内有两个孔,允许皮肤直接接触两个电极(未显示)。请点击此处查看此图的较大版本。
{kind=link}
- 开始假肢训练。
- 再次,从简单的假肢运动开始(只打开/关闭手,没有任何共收缩),假肢装置的重量得到支撑。
- 在不同的手臂位置进行简单的假肢运动,例如肘部交替伸展或弯曲。
- 继续执行简单的抓取任务,如拾取小盒子和操作小对象(参见图 2D)。
- 最后,训练日常生活活动,再次从相当简单的任务开始(如打开一扇门),并慢慢增加复杂性和任务,患者认为与他或她的具体生活情况相关。
- 假肢安装三个月后,使用假肢手重复对上肢功能的标准化评估,并录制结果视频。
结果
在6例患有包括多发性神经根外伤在内的严重胸椎丛伤的患者中,利用sEMG生物反馈成功实施了提出的康复方案。详细的病人特征见表1。图2演示了结构化康复协议的各个阶段,并详细介绍了其实施情况。
为了证明仿生重建前后手功能的改善,在两个时间点进行了全球上肢功能评估的标准化评估:无功能"丛"手选择性截肢前,以及成功的假肢重建和康复后。动作研究臂测试(ARAT)最初是为了评估手控制认知障碍患者的全球上肢运动功能而开发的。Yozbatiran等人17的标准化方法在我们的研究中被使用。ARAT 由四个不同的部分组成,包括接近日常生活的任务。测试由观察者进行时间,该观察者还将任务性能从 0⁄3 进行评分,其中 3 表示正常功能。最多57分是可达到的,表明不受损害的运动功能16。带有sEMG生物反馈的治疗次数和每个患者的详细结果见表2。
虽然患者对使用sEMG生物反馈提供的康复方案的满意度没有直接测量,但所有六名患者都报告发现,它对于理解神经转移手术后的再内化过程和训练肌肉的收缩与非常微弱的活动,以前是没有临床用途的。
| 案例编号 | 性别、年龄(年) | 事故类型 | 病变类型 | 初步重建后改善生物技术界面的手术未能改善手部功能 | |
| 1 | 米, 32 | 从高处坠落 | C7+T1的磨损;红外线丛的牵引损伤 | 前臂的选择性截肢 | |
| 2 | 米, 32 | 摩托车事故 | 英国石油公司所有3个断数的断裂 | 自由腹肌转移到前臂扩张室和径向神经深分支的神经化到腹神经;前臂的选择性截肢 | |
| 3 | 米, 55 | 摩托车事故 | C5_T1 的磨损 | 上臂的选择性截肢 | |
| 4 | 米, 38 | 摩托车事故 | 根部 C5_C8 大面积损坏;T1 的外爆 | 前臂的选择性截肢 | |
| 5 | 米, 27 | 摩托车事故 | Avulsion C8_T1 | 前臂的选择性截肢 | |
| 6 | 米, 43 | 摩托车事故 | C6_T1 的磨损 | 三头肌肌肉转移到红外线,将二头肌转移到下拉骨fossa,以改善假肢的安装;选择性截肢手臂(肩部外露) | |
表1:患者特征。在所有患者中,由于生物治疗替代品不可行,开始进行仿生重建。在前臂和上臂中建立EMG信号的手术可能包括选择性的神经和肌肉转移,然后驱动肌电假手。选择性截肢在跨辐射或跨月下进行,这取决于残留的肌肉活动。在这个患者组中进行的所有选择性神经转移都是成功的。此表已由 Sturma 等人12修改,并经神经科学前沿许可复制。
| 案例编号 | 基准处的 ARAT | 后续的 ARAT | SEMG 培训的开始 | 治疗次数(每次30分钟) | |
| 1 | 7 | 35 | 第一次咨询后立即 | 24 | |
| 2 | 0 | 15 | 第一次咨询后立即使用一个信号进行培训;第二个信号在自由格拉西利转移 +神经转移后 9 个月可用 | 30 | |
| 3 | 0 | 19 | 第一次咨询后立即 | 16 | |
| 4 | 1 | 22 | 第一次咨询后立即 | 20 | |
| 5 | 9 | 42 | 在决定进行仿生重建的决定后,立即进行生物重建,因为生物重建失败 | 20 | |
| 6 | 0 | 17 | 第一次咨询后立即 | 22 | |
| 均值 (= SD) | 2.83 × 4.07 | 25.00 × 10.94 | 22 × 4.32 | ||
表2:ARAT分数和治疗次数。在动作研究臂测试(ARAT)中,患者最初显示上肢功能可以忽略不计的(平均2.83,最多可达到57分)。仿生重建后恢复了有用的功能(平均25.00,57)。此表已由 Sturma 等人12修改,并经神经科学前沿许可复制。
讨论
生物反馈方法已广泛用于几种神经肌肉疾病的康复,从(血症)-胸腔引起的中心疾病,如脑出血和中风18,19到各种肌肉骨骼退化或损伤及其手术治疗20,21,22。有趣的是,结构化生物反馈的概念尚未在临床实践中实现。然而,正是在复杂的神经损伤的康复,实践,重复,和结构化的训练计划与适当的生物反馈是必要的,以建立正确的运动模式23。
在这里,在以前的研究12中,我们提出了一个结构化的康复协议,使用sEMG生物反馈为缺乏生物治疗替代品的患者有资格更换假手,这个概念今天被称为仿生重建。在仿生重建中使用sEMG生物反馈设置最明显的优势来自sEMG热点的精确定义,即皮肤位置,其中EMG活性的较高振幅可以转皮测量。各种电机命令可以交替尝试,因为传感器可以很容易地沿着整个前臂移动,并且 - 如果前臂缺少可检测到的肌肉功能 - 也位于上臂和肩腰。当患者被要求尝试收缩旨在执行特定动作(如伸展手腕)的肌肉时,可以放置电极,其中(弱)肌肉收缩被检查者拍打。在计算机屏幕上观察 EMG 信号时,当患者尝试收缩此肌肉时,可以轻松确定信号的振幅是否持续增加。如果振幅不够高或信号不一致,则可能会尝试具有相同电极位置的其他电机命令。与针EMG相反,这个程序是非侵入性的,不痛,可以重复所有肌肉/肌肉群在手臂。测试不同肌肉位置的各种电机命令,可以识别与特定运动动作相关的最高振幅和可重现活性的 EMG 热点。识别最强的 EMG 信号后,可以使用 sEMG 生物反馈对信号分离进行训练(计算机屏幕上不得发生两个或多个 EMG 信号的共同激活)、信号强度(由 EMG 信号的振幅)和信号可重复性(每次尝试收缩肌肉都必须导致相应 EMG 信号的偏移)。在训练的后期阶段,EMG活动直接转化为假肢功能,首先使用桌面假肢(见图3),向患者提供额外反馈,允许微调抓地力,然后佩戴物理假肢。
在传统的截肢者中,大量的文献表明,靶向肌肉-肾上腺素(TMR),即将残余手臂神经手术转移到胸部和上臂的替代肌肉部位,可以改善假肢功能,因为这些重新内侧肌肉作为直观运动指令的生物放大器,为假手、手腕和肘部控制提供生理上合适的EMG信号 24、25、26、27.使用模式识别控制系统,EMG 数据从放置在这些再内骨肌肉皮肤上的众多 sEMG 信号中提取,可以解码并转换为特定的可重现电机输出,从而提供更可靠的肌电假肢控制28,29,30。由于EMG信号位点的数量和肌肉的肌电活性在胸肌丛性损伤患者非常有限,模式识别算法可能不会像传统的截肢者那样使用。然而,随着进一步研究和改进的技术,这些系统也许能够提取关于现有微弱肌肉信号的更多信息,从而改善假肢功能也在这个特殊的患者群体。
虽然提出的协议被认为是一个准则,但细节需要根据患者和可用的设备进行调整。由于这种神经损伤后发生异常的再内伤,运动命令不一定导致在解剖学上激活"正确"的肌肉12。例如,作者观察了前臂屈肌室的EMG活性,而患者则试图张开手。因此,应测试各种电机命令,以便识别 EMG 信号。此外,残余肌肉功能(虽然在所有情况下太弱,无法产生有用的手部运动)可能在患者之间可能有很大差异,并导致所需训练时间的变化,如表2所示。此外,假肢装置的选择和用于控制的电极数量改变了信号分离精度、信号振幅和共收缩需求的要求。所有这些都需要在信号训练、混合假肢训练和实际假肢训练期间加以考虑,因为截肢者的标准假肢训练也建议31。关于用于sEMG生物反馈训练的设备,作者认为,如果设备能够同时显示假肢控制所需的信号数量,提供实时反馈,并且可以连接到计算机或显示器,则认为它们适合屏幕上的信号本身。允许在训练期间调整信号增益的设备是首选设备。
康复后,所有病人在日常生活活动中都能使用假肢,并满意地决定用假肢12替换无功能的手。这一功能改进反映在平均 ARAT 分数从 2.83 ± 4.07 到 25.00 = 10.94 (p = 0.028) 的显著增加。
从我们的角度来看,sEMG生物反馈设置提供了宝贵的工具,以促进与神经损伤和仿生重建相关的认知要求苛刻的运动恢复过程。使用sEMG生物反馈在临床设置中,使用sEMG生物反馈,大大简化了最佳EMG电极定位的识别和各种运动指令的测试,并直接可视化了肌肉活动。虽然sEMG生物反馈也可用于生物上肢功能10、12的康复,但其在仿生重建过程中的应用被认为特别有效。最重要的是,在训练期间激活的sEMG信号反映了假肢插座内的电极位置,该位置是为每个患者单独定制的。因此,在训练期间重复激活这些信号最有可能增加未来的假肢处理和手动能力。直接可视化这种肌肉活动也允许患者理解肌电手控制的概念,他/她可以更自觉地遵循训练进度。
将来,我们提出的康复协议可能会使用更先进的工具来扩展,以增强功能结果。这可能包括高密度sEMG记录,以方便通过活化热图32放置电极的过程,进一步虚拟解决方案,以评估EMG活性30,33,和严重的游戏,以加强训练动机34.此外,假肢控制的新技术,如模式识别算法也可能使用28,30,35。然而,由于神经肌肉界面的减少,目前尚不清楚目前为健康截肢者设计的商用系统是否会显著改善这一特定患者组的假肢功能。未来的研究应评估所列新技术对严重胸椎丛伤患者康复的适用性和益处。此外,具有较高患者人数的受控试验还将允许使用具有较高证据水平的sEMG生物反馈来证明当前协议的积极影响。
披露声明
作者没有什么可透露的。
致谢
这项研究由奥地利研究与技术发展理事会的克里斯蒂安·多普勒研究基金会和奥地利联邦科学、研究和经济部资助。我们感谢AronCserveny准备手稿中的插图,并感谢《神经科学前沿》允许复制原第12条中提供的数据。
材料
| Name | Company | Catalog Number | Comments |
| dry EMG electrodes | Ottobock Healthcare, Duderstadt, Germany | 13E202 = 50 | The EMG electrodes used in this study were bipolar and included a ground. They can be used both for EMG training with the Myoboy and for the control of a prosthetic device. |
| Myoboy | Otto bock Healthcare, Duderstadt, Germany | Myoboy | This device that can be used as stand alone device or with a computer. It allows to display EMG activity while using the dry EMG electrodes that can also be impeded in the prosthetic socket. |
| SensorHand Speed | Ottobock Healthcare, Duderstadt, Germany | All patients used this commercially available myoelectrical prosthesis as their standard prosthetic device and during functional testing. Fitting of patients undergoing this procedure is, however, not restricted to this device. | |
| Standard laptop with Microsoft operating system | Usually, devices for EMG biofeedback connected to a computer do not require much computing power and thus work on any regular laptop | ||
| TeleMyo 2400T G2 | Noraxon, US | A surface EMG biofeedback set-up used in our protocol, connected to TeleMyo-Software, which displays the recorded EMG activity as color-coded graphs on the computer screen | |
| wet EMG electrodes | Ambu | Ambu Blue Sensor VL Adhesive Electrodes | These adhesive electrodes can be used in combination with many different EMG biofeedback devices, including the TeleMyo 2400T. While they cannot be moved easily, the wet contacts usually allow to detect very faint EMG signals as well. |
参考文献
- Bertelli, J. A., Ghizoni, M. F. Results and current approach for Brachial Plexus reconstruction. Journal of Brachial Plexus and Peripheral Nerve Injury. 6 (1), 2 (2011).
- Birch, R. Traction lesions of the brachial plexus. British Journal of Hospital Medicine. 32 (3), 140-143 (1984).
- Narakas, A. O. The treatment of brachial plexus injuries. International Orthopaedics. 9 (1), 29-36 (1985).
- Terzis, J. K., Barbitsioti, A. Primary restoration of elbow flexion in adult post-traumatic plexopathy patients. Journal of Plastic, Reconstructive & Aesthetic Surgery. 65 (1), 72-84 (2012).
- Tung, T. H., Mackinnon, S. E. Nerve Transfers: Indications, Techniques, and Outcomes. The Journal of Hand Surgery. 35 (2), 332-341 (2010).
- Terzis, J. K., Vekris, M. D., Soucacos, P. N. Brachial plexus root avulsions. World Journal of Surgery. 25 (8), 1049-1061 (2001).
- Aszmann, O. C., et al. Bionic reconstruction to restore hand function after brachial plexus injury: a case series of three patients. Lancet. 385 (9983), 2183-2219 (2015).
- Hruby, L. A., et al. Algorithm for bionic hand reconstruction in patients with global brachial plexopathies. Journal of Neurosurgery. 127 (5), 1163-1171 (2017).
- Bergmeister, K. D., et al. Broadband Prosthetic Interfaces: Combining Nerve Transfers and Implantable Multichannel EMG Technology to Decode Spinal Motor Neuron Activity. Frontiers in Neuroscience. 11, 421 (2017).
- Kim, J. H. The effects of training using EMG biofeedback on stroke patients upper extremity functions. Journal of Physical Therapy Science. 29 (6), 1085-1088 (2017).
- Merletti, R. P. P. . Electromyography: Physiology, Engineering, and Non-Invasive Applications. , (2004).
- Sturma, A., Hruby, L. A., Prahm, C., Mayer, J. A., Aszmann, O. C. Rehabilitation of Upper Extremity Nerve Injuries Using Surface EMG Biofeedback: Protocols for Clinical Application. Frontiers in Neuroscience. 12, 906 (2018).
- Hruby, L. A., Pittermann, A., Sturma, A., Aszmann, O. C. The Vienna psychosocial assessment procedure for bionic reconstruction in patients with global brachial plexus injuries. PLoS ONE. 13 (1), 0189592 (2018).
- Vujaklija, I., Farina, D., Aszmann, O. New developments in prosthetic arm systems. Orthopedic Research and Reviews. 8, 31-39 (2016).
- Shin, Y. B., Shin, M. J., Chang, J. H., Cha, Y. S., Ko, H. Y. Effects of Botulinum Toxin on Reducing the Co-contraction of Antagonists in Birth Brachial Plexus Palsy. Annals of Rehabilitation Medicine. 38 (1), 127-131 (2014).
- Lyle, R. C. A performance test for assessment of upper limb function in physical rehabilitation treatment and research. International Journal of Rehabilitation Research. 4 (4), 483-492 (1981).
- Yozbatiran, N., Der-Yeghiaian, L., Cramer, S. C. A standardized approach to performing the action research arm test. Neurorehabilitation and Neural Repair. 22 (1), 78-90 (2008).
- Giggins, O. M., Persson, U. M., Caulfield, B. Biofeedback in rehabilitation. Journal of NeuroEngineering and Rehabilitation. 10, 60 (2013).
- Rayegani, S. M., et al. Effect of neurofeedback and electromyographic-biofeedback therapy on improving hand function in stroke patients. Topics in Stroke Rehabilitation. 21 (2), 137-151 (2014).
- Pfeufer, D., et al. Training with biofeedback devices improves clinical outcome compared to usual care in patients with unilateral TKA: a systematic review. Knee Surgery, Sports Traumatology, Arthroscopy. 27 (5), 1611-1620 (2018).
- Huang, H., Lin, J. J., Guo, Y. L., Wang, W. T. J., Chen, Y. J. EMG biofeedback effectiveness to alter muscle activity pattern and scapular kinematics in subjects with and without shoulder impingement. Journal of Electromyography and Kinesiology. 23 (1), 267-274 (2013).
- Oravitan, M., Avram, C. The effectiveness of electromyographic biofeedback as part of a meniscal repair rehabilitation programme. Journal of Sports Science and Medicine. 12 (3), 526-532 (2013).
- Novak, C. B., von der Heyde, R. L. Evidence and techniques in rehabilitation following nerve injuries. Hand Clinics. 29 (3), 383-392 (2013).
- Dumanian, G. A., et al. Targeted reinnervation for transhumeral amputees: current surgical technique and update on results. Plastic and Reconstructive Surgery. 124 (3), 863-869 (2009).
- Kuiken, T. A., et al. Targeted muscle reinnervation for real-time myoelectric control of multifunction artificial arms. JAMA. 301 (6), 619-628 (2009).
- Miller, L. A., et al. Control of a six degree of freedom prosthetic arm after targeted muscle reinnervation surgery. Archives of Physical Medicine and Rehabilitation. 89 (11), 2057-2065 (2008).
- Kuiken, T. A., et al. Targeted reinnervation for enhanced prosthetic arm function in a woman with a proximal amputation: a case study. Lancet. 369 (9559), 371-380 (2007).
- Scheme, E., Englehart, K. Electromyogram pattern recognition for control of powered upper-limb prostheses: state of the art and challenges for clinical use. Journal of Rehabilitation Research & Development. 48 (6), 643-659 (2011).
- Simon, A. M., Lock, B., Stubblefield, K. A. Patient training for functional use of pattern recognition-controlled prostheses. Journal of Prosthetics and Orthotics. 24 (2), 56-64 (2012).
- Simon, A. M., Hargrove, L. J., Lock, B. A., Kuiken, T. A. Target Achievement Control Test: evaluating real-time myoelectric pattern-recognition control of multifunctional upper-limb prostheses. Journal of Rehabilitation Research & Development. 48 (6), 619-627 (2011).
- Johnson, S. S., Mansfield, E. Prosthetic training: upper limb. Physical Medicine and Rehabilitation Clinics of North America. 25 (1), 133-151 (2014).
- Kapelner, T., et al. Motor Unit Characteristics after Targeted Muscle Reinnervation. PLoS ONE. 11 (2), 0149772 (2016).
- Sturma, A., et al. A surface EMG test tool to measure proportional prosthetic control. Biomedizinische Technik. Biomedical Engineering. 60 (3), 207-213 (2015).
- Prahm, C., Kayali, F., Sturma, A., Aszmann, O. PlayBionic: Game-Based Interventions to Encourage Patient Engagement and Performance in Prosthetic Motor Rehabilitation. PM&R. 10 (11), 1252-1260 (2018).
- Roche, A. D., et al. A Structured Rehabilitation Protocol for Improved Multifunctional Prosthetic Control: A Case Study. Journal of Visualized Experiments. (105), e52968 (2015).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。