Method Article
Biofeedback électromyographique de surface comme outil de réadaptation pour les patients présentant la blessure globale de Plexus brachial recevant la reconstruction bionique
Dans cet article
Résumé
Les résultats fonctionnels optimaux après reconstruction bionique dans les patients présentant des dommages brachial globaux de plexus dépendent d'un protocole structuré de réadaptation. La formation guidée électromyographique de surface peut améliorer l'amplitude, la séparation et la cohérence des signaux EMG, qui - après l'amputation élective d'une main sans fonction - contrôlent et conduisent une main prothétique.
Résumé
Dans les patients présentant des dommages brachial globaux de plexus et l'absence des alternatives biologiques de traitement, la reconstruction bionique, y compris l'amputation élective de la main sans fonction et son remplacement avec une prothèse, a été récemment décrite. La fonction prothétique optimale dépend d'un protocole de réadaptation structuré, car l'activité musculaire résiduelle dans le bras d'un patient est plus tard traduite en fonction prothétique. Le biofeedback électromyographique de surface (sEMG) a été employé pendant la réadaptation après course, mais n'a pas été jusqu'ici employé dans les patients présentant des dommages périphériques complexes de nerf. Ici, nous présentons notre protocole de réadaptation mis en œuvre dans les patients présentant des dommages brachial globaux de plexus appropriés pour la reconstruction bionique, commençant de l'identification des signaux de sEMG à la formation prothétique finale. Ce programme structuré de réadaptation facilite le réapprentissage moteur, qui peut être un processus cognitivement débilitant après des dommages complexes d'avulsion de racine de nerf, la re-innervation aberrante et la reconstruction extra-anatomique (comme c'est le cas avec le transfert de nerf chirurgie). Le protocole de réadaptation utilisant des aides de biofeedback de sEMG dans l'établissement de nouveaux modèles moteurs pendant que les patients sont mis au courant du processus avancé de re-innervation des muscles cibles. En outre, les signaux faibles peuvent également être formés et améliorés à l'aide du biofeedback sEMG, rendant un muscle cliniquement « inutile » (présentant la force musculaire M1 sur l'échelle du British Medical Research Council [BMRC]) admissible au contrôle de la main prothétique. En outre, les scores fonctionnels de résultats après reconstruction bionique réussie sont présentés dans cet article.
Introduction
Les dommages brachial de plexus globaux comprenant l'avulsion traumatique des racines de nerf de la moelle épinière représentent l'une des dommages nerveuses les plus graves chez l'homme et affectent habituellement de jeunes patients autrement en bonne santé dans la fleur de la vie1,2 . Selon le nombre de racines nerveuses avulsed, la paralysie complète de membre supérieur peut s'ensuivre puisque la connexion nerval du cerveau au bras et à la main est perturbée. Traditionnellement, l'avulsion des racines nerveuses a été associée à de mauvais résultats3. Avec les techniques microchirurgicales de nerf gagnant le terrain dans les dernières décennies, les résultats chirurgicaux ont été améliorés et la fonction motrice utile dans l'épaule et le coude sont habituellement restaurées4,5. La musculature intrinsèque dans la main, qui se trouve le plus distally, subit typiquement la dégénérescence grasse ayant pour résultat l'atrophie irréversible avant que les axones régénérants puissent l'atteindre6. Pour de tels cas la reconstruction bionique, qui inclut l'amputation élective de la main sans fonction de « plexus » et son remplacement avec une main méchatronique, a été décrite7,8. L'activité musculaire résiduelle dans l'avant-bras d'un patient, qui peut être cliniquement insignifiante (contractions isométriques, M1 sur l'échelle du British Medical Research Council [BMRC]), est prélevée à partir d'électrodes transcutanées sensifiant l'activité électromyographique, qui est puis traduit en divers mouvements d'une main prothétique9.
Assez de signaux électromyographiques de surface (SEMG) peuvent être présents lors de la consultation initiale. Dans certains cas, cependant, des signaux supplémentaires doivent être établis effectuer des transferts sélectifs de nerf et de muscle7. Dans les deux cas, un protocole de réadaptation structuré est nécessaire pour assurer la cohérence du signal sEMG et la fonction prothétique optimale ultérieure à la fin du processus. Un défi majeur suivant l'avulsion de racine de nerf et la re-innervation aberrante aussi bien qu'après chirurgie de transfert de nerf est l'établissement de nouveaux modèles moteurs pour permettre le contrôle volontaire au-dessus du muscle cible. les méthodes de biofeedback de sEMG ont été employées couramment dans la réadaptation de course10. Cette méthode permet une visualisation directe de l'activité musculaire qui serait autrement passée inaperçue en raison d'une faiblesse musculaire et/ou d'une co-activation d'antagonistes. Il encourage ainsi les patients à former leurs muscles faibles, tout en fournissant une rétroaction précise sur l'exécution correcte des tâches motrices11.
Dans une publication récente, nous avons montré pour la première fois que le biofeedback sEMG peut également être utilisé dans la réhabilitation des lésions nerveuses périphériques complexes12. Nous croyons que le biofeedback de sEMG est une méthode extrêmement utile pour rendre un patient conscient du processus de re-innervation d'avancement après chirurgie de transfert de nerf. En outre, l'activité musculaire faible, qui était autrefois d'aucune utilité pour le patient, peut être formé et renforcé pour le contrôle prothétique plus tard utilisant le biofeedback de sEMG, qui permet la visualisation concrète de l'activité musculaire autrement inaperçue au clinicien et au patient . Les progrès de la formation peuvent donc être bien compris et documentés. En outre, l'utilisation de la rétroaction directe sur l'activité musculaire permet au clinicien de corréler diverses commandes motrices avec l'amplitude et la consistance du signal associé, établissant les meilleures stratégies motrices pour permettre un contrôle prothétique robuste à l'avenir. En résumé, l'objectif de cette méthode est de faciliter le processus de réadaptation en augmentant la compréhension, la conscience et le contrôle d'un patient de ses signaux sEMG, qui conduira plus tard une main prothétique.
Protocole
La mise en œuvre clinique de ce protocole de réhabilitation a été approuvée par le comité d'éthique de l'Université médicale de Vienne (numéro de vote éthique: 1009/2014), autriche et réalisée conformément aux normes fixées par la Déclaration d'Helsinki. Tous les patients ont fourni le consentement éclairé écrit à la participation à cette étude.
REMARQUE : Des publications antérieures d'Aszmann et coll.7 et Hruby et coll.8,13 sont disponibles décrivant en détail le concept, l'algorithme de traitement et les conditions psychosociales concernant la reconstruction bionique. Le Tableau des matériaux fait référence à tous les matériaux et équipements utilisés dans le protocole de réhabilitation proposé.
1. Évaluation du patient lors de la consultation initiale
- Pour toutes les étapes de l'évaluation, de la réadaptation et de la formation des patients, trouvez un bureau ou une salle d'examen, où le patient est seul dans une atmosphère calme sans perturbations. Assurez-vous d'avoir suffisamment d'espace pour examiner le patient et mettre en place le système de biofeedback sEMG.
- Obtenir un historique détaillé de cas du patient comprenant le mécanisme de blessure et les premiers soins, des rapports sur les chirurgies précédentes de réparation de nerf, et l'incapacité subjective dans la vie quotidienne.
- Considérez seulement les patients pour la reconstruction bionique avec les alternatives échouées de traitement biologique (c.-à-d., réparation de nerf, transferts de nerf, reconstructions secondaires ayant pour résultat la fonction futile de membre supérieur). Exclure les patients ayant des dommages simultanés au système nerveux central, des fractures instables du membre affecté, des problèmes de santé mentale non traités et/ou résilients, une toxicomanie, un manque de conformité et un engagement à adhérer à une réadaptation durable émission.
- Effectuer un examen clinique détaillé axé sur la fonction actuelle des membres supérieurs. Évaluer cliniquement la fonction de tous les principaux muscles du bras et de la main affectés à l'aide de l'échelle de classement BMRC.
- Évaluer au sein d'une équipe multidisciplinaire composée de chirurgiens reconstructifs, de chirurgiens orthopédistes, de physiatres, de psychologues et de physiothérapeutes si des solutions de rechange au traitement biologique sont possibles. Expliquez au patient que la fonctionnalité d'une prothèse myoélectrique ne peut en aucun cas se comparer à celle d'une main biologique.
- Renseignez-vous auprès du patient sur ses motifs et ses perspectives sur la reconstruction bionique (voir une publication précédente13 comprenant l'entrevue structurée avec un psychologue afin d'évaluer si un patient est psychosocialement apte à passer par le processus de la bionique reconstruction).
- Évaluer si les signes de Tinel peuvent être obtenus le long de l'axe neural des nerfs périphériques principaux indiquant la présence d'axones viables appropriés pour la chirurgie de transfert de nerf.
- Outre l'évaluation des patients, esquissez également vaguement une chronologie possible de l'ensemble du processus, qui dépend de la disponibilité des signaux EMG détectables. Si d'autres interventions, telles que le soutien psychologique, l'entraînement à la posture et/ou le renforcement des muscles restants sont indiquées, commencez-les dès que possible.
2. Identification des signaux sEMG
- Mettre en place un système de biofeedback sEMG sur une table dans une pièce calme. Il peut s'agit d'un appareil autonome ou d'un appareil connecté à un ordinateur. Si un ordinateur est utilisé, connectez l'appareil EMG à l'ordinateur en branchant tous les câbles et démarrez le logiciel approprié sur l'ordinateur.
- Pour réduire l'impédance, préparer la peau du patient en rasant soigneusement la partie corporelle respective et/ou en enlevant doucement les cellules mortes de la peau avec un gel peeling ou une serviette en papier humide.
- Expliquer rapidement la fonctionnalité de l'appareil EMG et du logiciel informatique associé au patient.
- Placez le patient devant l'écran de l'ordinateur.
- Demandez au patient de penser aux mouvements des mains et en même temps tenter de contracter les muscles destinés à effectuer une action spécifique (comme l'extension du poignet, faire un poing, fléchir le pouce, etc), même si cela n'entraînera pas un mouvement réel de son sans-fonction main. Palpate son avant-bras pour la contraction (faible) de muscle.
- Placez une électrode sEMG sur la position exacte de la peau, où la contraction musculaire peut être palpée avec le doigt, par exemple, sur le compartiment extenseur dorsal 5 cm distal à l'articulation du coude en demandant au patient de penser à étendre son poignet et ses doigts.
REMARQUE : Bien que l'activité de sEMG puisse être détectée avec des électrodes humides et sèches, des électrodes sèches sont préparées pour l'essai car elles peuvent être facilement déplacées sur la peau pour vérifier des positions optimales. - Répétez la commande motrice utilisée auparavant (c.-à-d. l'extension du poignet et des doigts) pour obtenir une contraction du muscle.
- Observez le signal EMG sur l'écran de l'ordinateur et voyez si l'amplitude augmente constamment lorsque le patient tente de contracter le muscle destiné à effectuer une action spécifique (c.-à-d., l'extension du poignet et des doigts).
- Si l'amplitude n'est pas assez élevée (moins de 2 à 3 fois du bruit de fond12) ou si le signal est incohérent, essayez d'autres commandes motrices avec la même position d'électrode et voyez si des amplitudes plus élevées peuvent être obtenues.
- Répétez la procédure pour un groupe musculaire ou musculaire différent. Par exemple, déplacez l'électrode sEMG vers l'aspect volaire de l'avant-bras, en le plaçant sur le muscle du pronator teres, et demandez au patient de tenter de pronating son avant-bras. Observez le signal sur l'écran de l'ordinateur et voyez si l'amplitude augmente à plusieurs reprises lorsque le patient pense à ce mouvement.
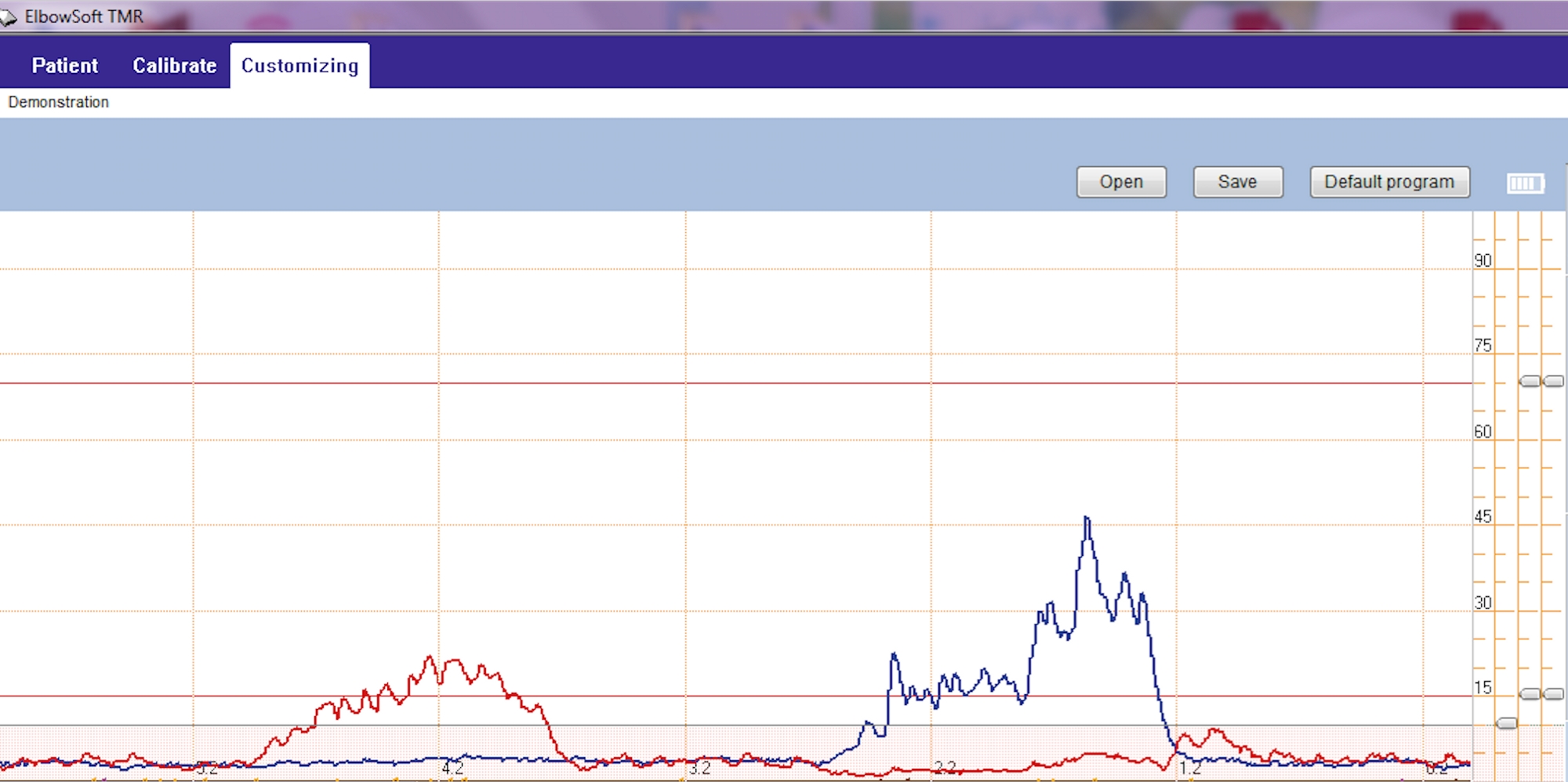
REMARQUE : Chez certains patients, aucune activité musculaire n'est palpable. Ici, trois électrodes sEMG ou plus devraient être placées sur l'aspect volaire, dorsal et radial de l'avant-bras et diverses commandes motrices devraient être tentées, observant de près tous les signaux pour les changements d'amplitude même avec les moindres changements dans le positionnement d'électrode ( voir Figure 1).

Figure 1 : Capture d'écran des signaux EMG sur un écran d'ordinateur.
Pour identifier l'activité EMG, deux électrodes ou plus peuvent être placées sur l'avant-bras d'un patient lui demandant de tenter divers mouvements. Dans ce cas précis, l'électrode sur l'aspect volaire de l'avant-bras détecte l'activité EMG telle que reflétée par la première vague rouge affichée sur l'écran de l'ordinateur, lorsque le patient tente de fermer sa main. La séparation du signal chez ce patient est satisfaisante, puisque le signal bleu, qui correspond à la deuxième électrode placée sur l'aspect dorsal de l'avant-bras, n'atteint pas le seuil. Lorsque le patient pense à ouvrir la main, l'amplitude du signal bleu dépasse le seuil, tandis que le signal rouge reste presque inactif. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
{kind=link}
- Essayez également les commandes motrices et les positions d'électrodes qui diffèrent de l'anatomie « normale » car la réinnervation aberrante et les reconstructions extra-anatomiques comme dans les transferts de nerfont ont modifié l'entrée neuronale aux muscles partiellement envahis.
- Si aucune activité musculaire n'est trouvée dans l'avant-bras, répétez la procédure sur le bras supérieur et la ceinture d'épaule.
REMARQUE : Chez certains patients, aucun signal sEMG n'est trouvé. Dans ceux-ci, les transferts de nerf et de muscle doivent être exécutés pour établir de nouveaux emplacements de signal d'EMG (le concept chirurgical détaillé peut être trouvé ailleurs7),retardant la formation de signal pendant 6-9 mois. Pour le contrôle de main proxénétisme, au moins deux signaux EMG séparables sont nécessaires.
3. Formation au signal guidée par le sEMG
REMARQUE : Les séances d'entraînement pour l'entraînement au signal guidé par le sEMG ne doivent pas dépasser 30 min, car cela entraîne une fatigue musculaire, ce qui entrave l'apprentissage moteur réussi. Les étapes décrites doivent être répétées sur une longue période de temps afin d'assurer une bonne coordination neuromusculaire au besoin plus tard pour un contrôle prothétique fiable.
- Dès que deux signaux EMG ou plus ont été identifiés, encouragez le patient à les activer en alternance (voir la figure 2A). Pour conduire de manière fiable une prothèse, les signaux EMG indépendants doivent être contrôlés sans interférence.
- Ajuster le gain de tension de chaque signal indépendamment pour atteindre un seuil d'amplitude similaire pour tous les signaux pendant la formation, ce qui rendra la séparation du signal et la compréhension plus facile pour le patient.
- Répétez et expliquez au patient la mécanique d'une main prothétique : une légère contraction musculaire conduira finalement à une meilleure séparation du signal et doit être préférée à la force musculaire, c'est-à-dire à l'amplitude d'un signal.

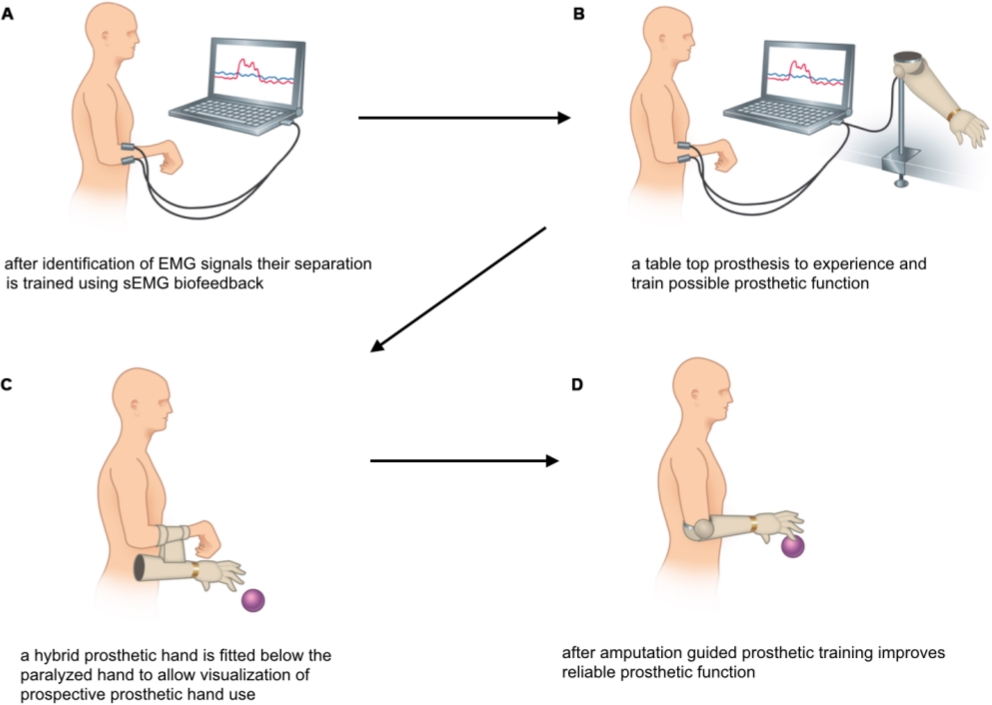
Figure 2 : réadaptation guidée par le SEMG pour les patients présentant la reconstruction bionique de main.
(A) Avec la visualisation directe de l'activité musculaire, diverses commandes motrices peuvent être tentées d'identifier la plus haute amplitude EMG sur un muscle cible spécifique et différentes positions de signal peuvent être comparées. (B) À l'aide d'une prothèse de table, l'activité EMG dans le bras d'un patient est directement traduite en fonction prothétique. (C) L'ajustement d'une main prothétique hybride permet au patient de visualiser et de comprendre l'utilisation future de la main prothétique. (D) Après la reconstruction prothétique, les signaux EMG peuvent être formés et optimisés soit avec le biofeedback sEMG ou avec la main prothétique elle-même. Ce chiffre a été modifié à partir de Sturma et coll.12 et reproduit avec la permission de Frontiers in Neuroscience. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
{kind=link}
- Observez les signaux EMG sur l'écran de l'ordinateur et faites prendre conscience au patient si les deux signaux sont co-activés lors de la tentative d'un mouvement spécifique. Expliquez au patient que deux signaux ne doivent pas être co-activés lors de la tentative d'une action spécifique, car chaque signal EMG est lié à une action prothétique spécifique. Les signaux co-activés n'entraîneront donc pas l'action souhaitée par le patient.
- Instruisez le patient à essayer différents (légers) mouvements et observez quels modèles de mouvement précis sont les meilleurs en ce qui concerne la séparation du signal. Encouragez le patient à entraîner ces mouvements.
- Faites savoir au patient qu'une séparation parfaite du signal est peu probable au début de la formation, mais qu'elle s'améliorera avec un grand nombre de répétitions.
CAUTION: Autoriser les phases de relaxation que la force musculaire peut diminuer plus rapidement chez les patients présentant des lésions nerveuses complexes et la myoactivité faible. - Avec une meilleure consistance du signal, demandez au patient de générer une amplitude de signal plus élevée pour renforcer davantage le muscle et son signal.
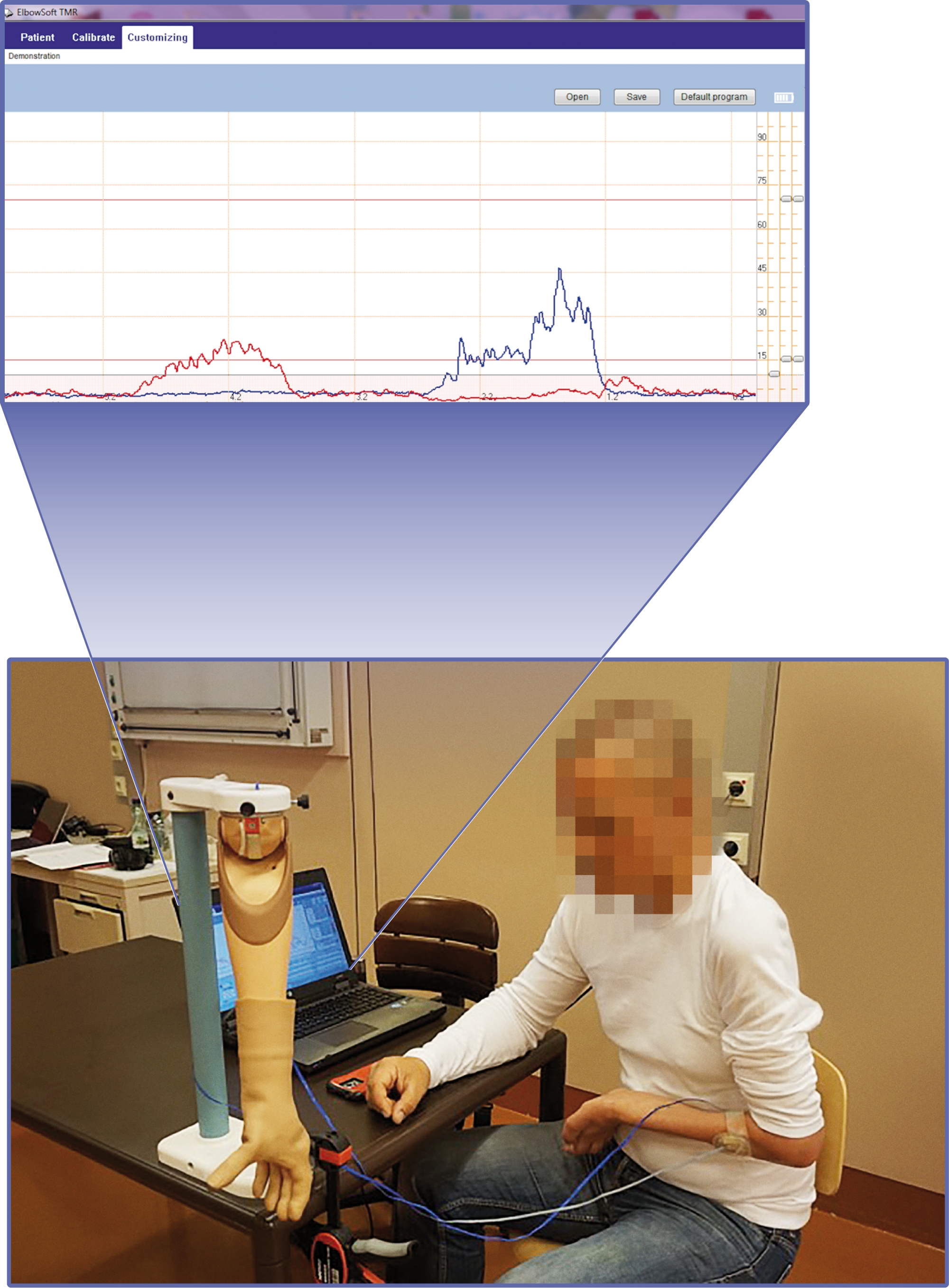
- Avec la séparation constante de signal d'EMG et le contrôle plein, installez une prothèse de dessus de table reliée au logiciel correspondant d'EMG et aux électrodes placées sur l'avant-bras/bras du patient. Cela traduira directement l'activité EMG en fonction prothétique mécanique (voir La figure 2B et la figure 3).

Figure 3 : Patient devant une prothèse de table et capture d'écran de ses deux signaux sur un écran d'ordinateur.
Sur l'avant-bras du patient, deux électrodes détectent l'activité d'EMG. Ces deux signaux sont affichés sous forme de graphiques codés en couleur sur l'écran de l'ordinateur (rouge et bleu) et sont simultanément traduits en mouvement prothétique, permettant au patient de comprendre la relation entre la qualité du signal et le contrôle des prothèses. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
{kind=link}
- Informez le patient que les prothèses myoélectriques avec contrôle direct utilisent l'entrée d'une électrode (c.-à-d. l'activité musculaire détectée à partir d'une électrode) pour contrôler un mouvement prothétique.
- Sensibiliser le patient à la corrélation entre l'apparence du signal (principalement la hauteur d'amplitude) sur l'écran de l'ordinateur et la vitesse/force du mouvement prothétique, au cas où un dispositif avec un contrôle proportionnel de la vitesse de déplacement serait choisi.
REMARQUE : Selon le nombre de signaux EMG disponibles et les degrés de liberté du dispositif prothétique final, il pourrait être nécessaire d'utiliser des méthodes pour passer de ces degrés de liberté. Une méthode fréquemment utilisée de commutation entre les degrés de liberté (par exemple, main ouverte / proche de la pronation / supination) est par l'intermédiaire de la contraction simultanée de deux muscles, également connu sous le nom de co-contraction14. - Co-contraction du train. Laissez le patient observer les signaux EMG sur l'écran de l'ordinateur et la prothèse. Si le dispositif prothétique ne bouge pas, c'est-à-dire ouvert/fermé pendant la co-contraction, le patient le fait correctement.
4. Entraînement hybride à l'ajustement des mains et prothèse
- Marquez les positions d'électrode sur la peau du patient, qui ont été définies comme optimales pour le contrôle prothétique fiable et laissez un technicien orthopédique fabriquer une prise prothétique préliminaire conçue avec ces positions exactes d'électrode.
- Montez une main prothétique hybride avec la prise personnalisée sur ou au-dessous de la main «plexus» sans fonction (voir Figure 2C).
- Exécutez simultanément le logiciel EMG pour sensibiliser le patient à ses actions.
- Entraînez alternativement différents mouvements prothétiques. Des électrodes peuvent également être placées sur les muscles adjacents le long du bras supérieur et de la ceinture d'épaule pour éviter les co-contractions inconscientes, ce qui entraînera une fatigue dans l'ensemble du membre supérieur avec des temps de port accrus.
- Commencez par des mouvements prothétiques simples (seulement ouvrir/fermer la main sans aucune co-contraction) avec le poids de l'appareil prothétique étant soutenu.
- Passez à de simples mouvements prothétiques dans différentes positions de bras, comme le coude étant étendu ou fléchi en alternance. Sensibiliser le patient aux anomalies du signal lors de l'ajustement des différentes positions du bras et de la cohérence du signal de train dans toutes les positions.
REMARQUE : Après la régénération spontanée de nerf s'est co-activation involontaire de différents groupes de muscle ou de muscle se produit souvent due à la re-innervation anormale, qui peut entraver des mouvements coordonnés et désactiver des activités de muscleadéquates 15. Faint contraction musculaire involontaire se produit souvent lors du déplacement du bras, qui est senti par des capteurs sEMG et traduit en mouvement prothétique. Ceci peut avoir comme conséquence le contrôle prosthétique pauvre, si pas convenablement adressé pendant la réadaptation utilisant la formation d'EMG et le renforcement de muscle comme décrit ci-dessous. - En cas de contrôle prothétique encombrant dans différentes positions de bras, observez soigneusement les signaux EMG sur l'écran de l'ordinateur et signalez au patient, dans quelle contraction involontaire de la position du bras d'un ou plusieurs muscles conduit à l'excursion de signal. Entraînez l'activation précise des signaux EMG dans des positions que le patient peut encore gérer et changer lentement la position du bras au fil du temps.
- Effectuer un entraînement de force pour les fléchisseurs de coude (et les muscles de l'épaule, le cas échéant), si la co-activation des muscles utilisés pour le contrôle prothétique est observée lors du levage du bras. Expliquez au patient qu'un muscle plus fort (c.-à-d. un muscle qui ne fonctionne pas avec sa force volontaire maximale pendant les tâches simples de levage) contribue habituellement également à une meilleure séparation des signaux. Effectuez également l'entraînement de force, si les muscles supérieurs de membre sont trop faibles pour déplacer le dispositif prosthétique dans l'espace tridimensionnel et/ou stabiliser l'épaule pendant ce faisant.
- Continuer avec des tâches simples de saisie, telles que ramasser de petites boîtes et manipuler de petits objets (voir Figure 2C).
- Enfin, entraînez des tâches simples de la vie quotidienne comme ouvrir une porte, plier une serviette ou ouvrir une bouteille.
REMARQUE: De nombreuses tâches peuvent être limitées en raison du fait que la main paralysée se met en chemin, et l'appareil peut se sentir assez lourd que le patient doit soulever le poids de sa propre main en plus de la main prothétique hybride.
- Si la qualité du signal est insuffisante, il pourrait être bénéfique de revenir à la formation de signal sur l'écran de l'ordinateur. Dans toutes les tâches, recherchez spécifiquement la co-activation des signaux sur l'écran de l'ordinateur et améliorent encore l'indépendance du signal.
- Évaluer la fonction des membres supérieurs à l'aide de la main prothétique hybride et enregistrer la vidéo des résultats des tests. En outre, utilisez les mêmes évaluations pour la main paralysée afin de documenter l'avantage fonctionnel attendu du remplacement prothétique de la main sans fonction.
5. Amputation élective et remplacement de la main prothétique
- Planifiez précisément le niveau d'amputation en fonction du site des différents signaux EMG (transradial, transhuméral ou, dans de rares cas, glenohumeral) dans l'équipe multidisciplinaire composée du physiothérapeute/formateur EMG du patient, le chirurgien responsable pour l'amputation et le psychologue familier avec les attentes du patient.
- Demandez au patient s'il a des questions non résolues concernant l'amputation prévue et communiquez clairement qu'il est possible à tout moment avant l'amputation de révoquer cette décision, ce qui entraînera autrement une chirurgie irréversible et qui changera sa vie.
- Effectuer l'évaluation normalisée de la fonction des membres supérieurs à l'aide de la main sans fonction et filmer les résultats
- Effectuer l'évaluation normalisée de la fonction des membres supérieurs à l'aide de la main prothétique hybride et filmer les résultats pour documenter les avantages d'un futur raccord prothétique.
- Effectuer l'amputation élective du membre sans fonction tel que décrit précédemment7,8.
- Permettre la cicatrisation des plaies postopératoires et laisser le patient former les articulations adjacentes pour une meilleure mobilité des membres supérieurs. Après 4 à 6 semaines, entraînez les signaux EMG tels que décrits ci-dessus et définissez les meilleurs points chauds pour les positions des électrodes.
REMARQUE : Ces positions d'électrode et commandes motrices peuvent différer légèrement de celles trouvées avant l'amputation. - Laissez un technicien orthopédique concevoir la prise prothétique finale à l'aide des positions d'électrode EMG précédemment définies (voir figure 4, illustrant une conception possible de prise dans l'un des patients inclus).
REMARQUE : Bien qu'il n'y ait aucune conception spécifique de prise recommandée, la position exacte des électrodes et leur adhérence à la peau de la souche sont de la plus haute importance car les patients brachial de plexus ont une interface neuro-musculaire largement réduite.

Figure 4 : Exemple d'une prothèse et d'une conception de prise possibles.
(A) La prothèse de ce patient consiste en une gaine extérieure en carbone. (B) Au lieu d'une main prothétique, le patient préfère utiliser un crochet, qui s'ouvre et se ferme, comme un outil de prédiledation. (C,D) Les deux électrodes sont intégrées dans la prothèse. Le patient porte une doublure en silicone avec deux trous dedans, permettant le contact direct de peau avec les deux électrodes (non montrées). Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
{kind=link}
- Commencez l'entraînement prothétique.
- Encore une fois, commencez par des mouvements prothétiques simples (seulement ouvrir / fermer la main sans aucune co-contraction) avec le poids de l'appareil prothétique étant soutenu.
- Passez à de simples mouvements prothétiques dans différentes positions de bras, comme le coude étant étendu ou fléchi en alternance.
- Continuer avec des tâches simples de saisie telles que ramasser de petites boîtes et manipuler de petits objets (voir Figure 2D).
- Enfin, former les activités de la vie quotidienne, en commençant à nouveau par des tâches assez simples (comme l'ouverture d'une porte) et ajouter lentement la complexité et les tâches que le patient considère comme pertinentes pour sa situation de vie spécifique.
- Trois mois après l'ajustement prothétique, répétez l'évaluation normalisée de la fonction supérieure de membre utilisant la main prosthétique et enregistrez une vidéo des résultats.
Résultats
Dans six patients présentant des dommages graves de plexus brachial comprenant des avulsions multiples de racine de nerf le protocole présenté de réadaptation utilisant le biofeedback de sEMG a été avec succès mis en oeuvre. Les caractéristiques détaillées du patient se trouvent dans le tableau 1. La figure 2 montre les différentes phases du protocole de réadaptation structuré et des explications détaillées sur sa mise en œuvre.
Pour démontrer des améliorations dans la fonction de main avant et après la reconstruction bionique, une évaluation normalisée évaluant la fonction supérieure globale d'extrémité a été exécutée à deux points de temps : avant l'amputation élective de la main sans fonction de « plexus » aussi bien que après une reconstruction et une réhabilitation prothétiques réussies. L'essai d'action Research Arm (ARAT) a été développé à l'origine pour évaluer la fonction motrice globale d'extrémité supérieure dans les patients présentant l'affaiblissement cognitif du contrôle de main16. L'approche normalisée de Yozbatiran et coll.17 a été utilisée dans nos études. L'ARAT se compose de quatre sections différentes, qui comprennent des tâches proches de la vie quotidienne. Le test est chronométré par l'observateur qui évalue également le rendement de la tâche de 0 à 3, avec 3 indiquant la fonction normale. Un maximum de 57 points est atteignable indiquant la fonction motrice intacte16. Le nombre de séances de thérapie avec le biofeedback sEMG et les résultats détaillés pour chaque patient peuvent être trouvés dans le tableau 2.
Bien que la satisfaction du patient avec le protocole de réadaptation offert utilisant le biofeedback de sEMG n'ait pas été directement mesurée, chacun des six patients a rapporté pour le trouver extrêmement utile en comprenant le processus de re-innervation suivant la chirurgie de transfert de nerf et pour entraîner la contraction des muscles avec une activité très faible qui était autrefois d'aucune utilité clinique pour eux.
| Numéro de cas | Sexe, âge (années) | Type d'accident | Type de lésion | Chirurgies pour améliorer l'interface biotechnologique après les reconstructions initiales n'ont pas réussi à améliorer la fonction de la main | |
| 1 | m, 32 | Chute de la hauteur | Avulsion de C7-T1; blessure de traction du plexus infraclaviculaire | Amputation élective de l'avant-bras | |
| 2 | m, 32 | Accident de moto | Rupture des 3 trunci de la BP | Muscle gracilis libre transféré au compartiment d'extenseur d'avant-bras et à la neurotisation de la branche profonde du nerf radial au nerf obturateur ; amputation élective de l'avant-bras | |
| 3 | m, 55 ans | Accident de moto | Avulsion de C5-T1 | Amputation élective du bras supérieur | |
| 4 | m, 38 ans | Accident de moto | Dommages importants aux racines C5-C8; avulsion de T1 | Amputation élective de l'avant-bras | |
| 5 | m, 27 ans | Accident de moto | Avulsion C8-T1 | Amputation élective de l'avant-bras | |
| 6 | m, 43 | Accident de moto | Avulsion de C6-T1 | Transfert du muscle de triceps à la fossa infraspinatous et au transfert du muscle de biceps au fossa supraclavulaire pour améliorer le montage prosthétique ; Amputation élective du bras (exarticulation de l'épaule) | |
Tableau 1 : Caractéristiques du patient. Dans tous les patients, la reconstruction bionique a été lancée en raison de l'infaisabilité des alternatives biologiques de traitement. Les chirurgies pour établir les signaux DME dans l'avant et le bras supérieur peuvent inclure des transferts sélectifs de nerf et de muscle, qui conduira alors une main prothétique myoélectrique. L'amputation élective est effectuée au niveau transradial ou transhuméral, selon l'activité musculaire résiduelle. Tous les transferts sélectifs de nerf exécutés dans ce groupe patient étaient réussis. Ce tableau a été modifié à partir de Sturma et coll.12 et reproduit avec la permission de Frontiers in Neuroscience.
| Numéro de cas | ARAT à la ligne de base | ARAT au suivi | Début de la formation sEMG | Nombre de séances de thérapie au total (30 min chacune) | |
| 1 | 7 | 35 | Immédiatement après la première consultation | 24 | |
| 2 | 0 | 15 | Formation avec un signal immédiatement après la première consultation; deuxième signal était disponible 9 mois après le transfert gracilis gratuit - transfert de nerf | 30 | |
| 3 | 0 | 19 | Immédiatement après la première consultation | 16 | |
| 4 | 1 | 22 | Immédiatement après la première consultation | 20 | |
| 5 | 9 | 42 | Immédiatement après la décision de viser une reconstruction bionique que la reconstruction biologique a échoué | 20 | |
| 6 | 0 | 17 | Immédiatement après la première consultation | 22 | |
| Moyenne (SD) | 2,83 à 4,07 | 25.00 à 10.94 | De 22 à 4,32 | ||
Tableau 2 : Scores aRAT et nombre de séances de thérapie. Dans le test action Research Arm (ARAT), les patients ont initialement montré la fonction négligeable des membres supérieurs (moyenne 2,83, d'un maximum de 57 points réalisables). La fonction utile a été restaurée après reconstruction bionique (moyenne 25.00, de 57). Ce tableau a été modifié à partir de Sturma et coll.12 et reproduit avec la permission de Frontiers in Neuroscience.
Discussion
Les approches de biofeedback ont été largement utilisées dans la réadaptation de plusieurs désordres neuromusculaires, s'étendant des conditions (hemi)-plégiques résultant des pathologies centrales telles que l'hémorragie cérébrale et la course18,19 à diverses dégénérescence smusculo-squelettique ou des blessures et leur thérapie chirurgicale20,21,22. Fait intéressant, le concept de biofeedback structuré n'a pas été mis en œuvre dans la pratique clinique pour les lésions nerveuses périphériques. Cependant, précisément dans la réadaptation des dommages nerveux complexes, la pratique, la répétition, et les programmes structurés de formation avec le biofeedback approprié sont nécessaires pour établir des modèles moteurs corrects23.
Ici, et dans une étude précédente12,nous avons présenté un protocole structuré de réadaptation utilisant le biofeedback de sEMG pour des patients présentant l'absence des alternatives biologiques de traitement éligibles pour le remplacement prosthétique de main, un concept aujourd'hui connu sous le nom bionique reconstruction. L'avantage le plus apparent de l'utilisation d'une configuration de biofeedback sEMG dans le contexte de la reconstruction bionique provient de la définition exacte des points chauds de sEMG, c'est-à-dire des emplacements de peau, où une amplitude relativement élevée de l'activité d'EMG peut être mesurée transcutanéement. Diverses commandes motrices peuvent être tentées en alternance, car les capteurs peuvent facilement être déplacés le long de l'avant-bras entier, et - en cas de manque de fonction musculaire détectable dans l'avant-bras - aussi dans le bras supérieur et la ceinture de l'épaule. Lorsqu'un patient est invité à tenter de contracter les muscles destinés à effectuer une action spécifique (comme l'extension du poignet), une électrode peut être placée, où la contraction musculaire (faible) est palpée par l'examinateur. En observant le signal EMG sur l'écran de l'ordinateur, on peut facilement déterminer si l'amplitude du signal augmente constamment, lorsque le patient tente de contracter ce muscle. Si l'amplitude n'est pas assez élevée ou si le signal est incohérent, d'autres commandes motrices avec la même position d'électrode peuvent être tentées. Comme s'opposer à l'aiguille EMG, cette procédure est non-invasive, pas douloureux et peut être répété pour tous les muscles / groupes musculaires dans le bras. L'essai de différentes commandes motrices à différents emplacements musculaires permet d'identifier les points chauds EMG, avec la plus grande amplitude et l'activité reproductible associée à une action motrice spécifique. Après identification des signaux EMG les plus forts, ceux-ci peuvent être formés à l'aide du biofeedback sEMG en ce qui concerne la séparation du signal (co-activation de deux signaux EMG ou plus ne doit pas se produire sur l'écran de l'ordinateur), la force du signal (reflétée par le signal EMG l'amplitude sur l'écran de l'ordinateur) et la reproductibilité du signal (chaque tentative de contracter le muscle doit conduire à une excursion du signal EMG respectif). À un stade ultérieur de la formation, l'activité EMG est directement traduite en fonction prothétique, d'abord à l'aide d'une prothèse de table (voir Figure 3), qui donne une rétroaction supplémentaire au patient permettant de peaufiner la force d'adhérence, puis le port de la prothèse physique.
Chez les amputés conventionnels, une grande quantité de littérature a montré que la réinnervation ciblée de muscle (TMR), c.-à-d., le transfert chirurgical des nerfs résiduels de bras aux emplacements alternatifs de muscle dans la poitrine et le bras supérieur, améliore la fonction prosthétique, puisque ces les muscles réinnervated servent d'amplificateurs biologiques des commandes motrices intuitives et fournissent des signaux EMG physiologiquement appropriés pour le contrôle de main, de poignet et de coude24,25,26,27 . À l'aide de systèmes de contrôle de reconnaissance des motifs, les données EMG extraites de nombreux signaux sEMG placés sur la peau de ces muscles réinnervated peuvent être décodées et traduites en sorties motrices spécifiques et reproductibles, qui fournissent des produits myoélectriques plus fiables. contrôle de prothèse28,29,30. Puisque le nombre de sites de signal d'EMG et l'activité myoélectrique des muscles dans les patients présentant des dommages brachial d'avulsion de plexus sont très limités, les algorithmes de reconnaissance de modèle peuvent ne pas être employés comme c'est fait pour les amputés conventionnels8. Pourtant, avec d'autres recherches et une technologie améliorée, ces systèmes peuvent être en mesure d'extraire plus d'informations sur les signaux musculaires faibles existants et donc améliorer la fonction prothétique aussi dans ce groupe de patients particulier.
Bien que le protocole présenté soit considéré comme une ligne directrice, les détails doivent être adaptés en fonction du patient et de l'équipement disponible. En raison de la ré-innervation aberrante se produisant après de telles dommages de nerf, les commandes de moteur n'ont pas nécessairement comme conséquence l'activation des muscles anatomiquement « corrects »12. Par exemple, les auteurs ont observé l'activité d'EMG au compartiment de fléchisseur d'avant-bras, tandis que les patients essayaient d'ouvrir leur main. Par conséquent, diverses commandes motrices doivent être testées afin d'identifier les signaux EMG. En outre, la fonction musculaire résiduelle (bien que dans tous les cas trop faible pour générer des mouvements utiles de la main) peut varier considérablement d'un patient à l'autre et entraîner des variations dans le temps d'entraînement requis, comme le montre le tableau 2. En outre, le choix de la prothèse et le nombre d'électrodes utilisées pour le contrôle modifient les exigences relatives à la précision de la séparation du signal, à l'amplitude du signal et au besoin de co-contraction. Tout cela doit être pris en compte lors de la formation au signal, de la formation aux prothèses hybrides et de la formation prothétique réelle, comme il est également recommandé dans la formation prothétique standard des amputés31. En ce qui concerne les dispositifs utilisés pour la formation de biofeedback sEMG, les auteurs considèrent que les dispositifs conviennent s'ils peuvent afficher simultanément le nombre de signaux nécessaires pour le contrôle des prothèses, donner une rétroaction en temps réel, et peuvent être connectés à un ordinateur ou à l'affichage les signaux sur un écran eux-mêmes. Les appareils qui permettent d'ajuster le gain de signal pendant l'entraînement sont préférés.
Après la réadaptation, tous les patients ont pu utiliser leur prothèse pendant les activités de la vie quotidienne et ont été satisfaits de la décision de faire remplacer leur main sans fonction par un dispositif prothétique12. Cette amélioration fonctionnelle s'est traduite par des augmentations significatives des scores aRAT moyens de 2,83 à 4,07 à 25,00 et 10,94 (p à 0,028).
De notre point de vue, les configurations de biofeedback de sEMG présentent des outils valables pour faciliter le processus cognitivement exigeant de récupération de moteur lié aux dommages de nerf et à la reconstruction bionique. L'identification du positionnement optimal des électrodes EMG et l'essai de diverses commandes motrices avec visualisation directe de l'activité musculaire sont grandement simplifiés à l'aide du biofeedback sEMG dans une configuration clinique. Bien que le biofeedback de sEMG puisse également être employé dans la réadaptation de la fonction biologique supérieure de membre10,12,son application dans le processus de reconstruction bionique est considérée particulièrement efficace. Plus important encore, les signaux sEMG activés pendant la formation reflètent plus tard les positions d'électrode dans la prise prothétique, qui est personnalisée individuellement pour chaque patient. Par conséquent, l'activation répétitive de ces signaux pendant l'entraînement augmente très probablement la manipulation future des prothèses et la capacité manuelle. La visualisation directe de cette activité musculaire permet également à un patient de comprendre le concept de contrôle de la main myoélectrique et il / elle peut suivre les progrès de la formation plus consciemment.
À l'avenir, notre protocole de réadaptation présenté pourrait être étendu avec des outils plus avancés pour améliorer les résultats fonctionnels. Cela pourrait inclure des enregistrements sEMG à haute densité pour faciliter le processus de placement d'électrodes via des cartes thermiques d'activation32, d'autres solutions virtuelles pour évaluer l'activité EMG30,33, et des jeux sérieux pour améliorer la formation motivation34. En outre, de nouvelles technologies pour le contrôle des prothèses, telles que les algorithmes de reconnaissance de modèles pourraient également être utilisés28,30,35. Cependant, en raison de l'interface neuromusculaire réduite, il n'est pas clair si les systèmes actuellement disponibles dans le commerce conçus pour les amputés autrement en bonne santé amélioreraient de manière significative la fonction prothétique dans ce groupe spécifique de patients. Les études futures devraient évaluer l'applicabilité et les avantages des nouvelles technologies énumérées pour la réadaptation des patients présentant des dommages brachial graves de plexus. En outre, les essais contrôlés avec un nombre plus élevé de patients permettront également de démontrer les effets positifs du protocole actuel en utilisant le biofeedback sEMG avec un niveau plus élevé de preuves.
Déclarations de divulgation
Les auteurs n'ont rien à révéler.
Remerciements
Cette étude a été financée par la Christian Doppler Research Foundation du Conseil autrichien pour la recherche et le développement technologique et le Ministère fédéral autrichien de la science, de la recherche et de l'économie. Nous sommes reconnaissants à Aron Cserveny pour la préparation des illustrations incluses dans le manuscrit et à Frontiers in Neuroscience pour la permission de reproduire les données présentées dans l'article original12.
matériels
| Name | Company | Catalog Number | Comments |
| dry EMG electrodes | Ottobock Healthcare, Duderstadt, Germany | 13E202 = 50 | The EMG electrodes used in this study were bipolar and included a ground. They can be used both for EMG training with the Myoboy and for the control of a prosthetic device. |
| Myoboy | Otto bock Healthcare, Duderstadt, Germany | Myoboy | This device that can be used as stand alone device or with a computer. It allows to display EMG activity while using the dry EMG electrodes that can also be impeded in the prosthetic socket. |
| SensorHand Speed | Ottobock Healthcare, Duderstadt, Germany | All patients used this commercially available myoelectrical prosthesis as their standard prosthetic device and during functional testing. Fitting of patients undergoing this procedure is, however, not restricted to this device. | |
| Standard laptop with Microsoft operating system | Usually, devices for EMG biofeedback connected to a computer do not require much computing power and thus work on any regular laptop | ||
| TeleMyo 2400T G2 | Noraxon, US | A surface EMG biofeedback set-up used in our protocol, connected to TeleMyo-Software, which displays the recorded EMG activity as color-coded graphs on the computer screen | |
| wet EMG electrodes | Ambu | Ambu Blue Sensor VL Adhesive Electrodes | These adhesive electrodes can be used in combination with many different EMG biofeedback devices, including the TeleMyo 2400T. While they cannot be moved easily, the wet contacts usually allow to detect very faint EMG signals as well. |
Références
- Bertelli, J. A., Ghizoni, M. F. Results and current approach for Brachial Plexus reconstruction. Journal of Brachial Plexus and Peripheral Nerve Injury. 6 (1), 2 (2011).
- Birch, R. Traction lesions of the brachial plexus. British Journal of Hospital Medicine. 32 (3), 140-143 (1984).
- Narakas, A. O. The treatment of brachial plexus injuries. International Orthopaedics. 9 (1), 29-36 (1985).
- Terzis, J. K., Barbitsioti, A. Primary restoration of elbow flexion in adult post-traumatic plexopathy patients. Journal of Plastic, Reconstructive & Aesthetic Surgery. 65 (1), 72-84 (2012).
- Tung, T. H., Mackinnon, S. E. Nerve Transfers: Indications, Techniques, and Outcomes. The Journal of Hand Surgery. 35 (2), 332-341 (2010).
- Terzis, J. K., Vekris, M. D., Soucacos, P. N. Brachial plexus root avulsions. World Journal of Surgery. 25 (8), 1049-1061 (2001).
- Aszmann, O. C., et al. Bionic reconstruction to restore hand function after brachial plexus injury: a case series of three patients. Lancet. 385 (9983), 2183-2219 (2015).
- Hruby, L. A., et al. Algorithm for bionic hand reconstruction in patients with global brachial plexopathies. Journal of Neurosurgery. 127 (5), 1163-1171 (2017).
- Bergmeister, K. D., et al. Broadband Prosthetic Interfaces: Combining Nerve Transfers and Implantable Multichannel EMG Technology to Decode Spinal Motor Neuron Activity. Frontiers in Neuroscience. 11, 421 (2017).
- Kim, J. H. The effects of training using EMG biofeedback on stroke patients upper extremity functions. Journal of Physical Therapy Science. 29 (6), 1085-1088 (2017).
- Merletti, R. P. P. . Electromyography: Physiology, Engineering, and Non-Invasive Applications. , (2004).
- Sturma, A., Hruby, L. A., Prahm, C., Mayer, J. A., Aszmann, O. C. Rehabilitation of Upper Extremity Nerve Injuries Using Surface EMG Biofeedback: Protocols for Clinical Application. Frontiers in Neuroscience. 12, 906 (2018).
- Hruby, L. A., Pittermann, A., Sturma, A., Aszmann, O. C. The Vienna psychosocial assessment procedure for bionic reconstruction in patients with global brachial plexus injuries. PLoS ONE. 13 (1), 0189592 (2018).
- Vujaklija, I., Farina, D., Aszmann, O. New developments in prosthetic arm systems. Orthopedic Research and Reviews. 8, 31-39 (2016).
- Shin, Y. B., Shin, M. J., Chang, J. H., Cha, Y. S., Ko, H. Y. Effects of Botulinum Toxin on Reducing the Co-contraction of Antagonists in Birth Brachial Plexus Palsy. Annals of Rehabilitation Medicine. 38 (1), 127-131 (2014).
- Lyle, R. C. A performance test for assessment of upper limb function in physical rehabilitation treatment and research. International Journal of Rehabilitation Research. 4 (4), 483-492 (1981).
- Yozbatiran, N., Der-Yeghiaian, L., Cramer, S. C. A standardized approach to performing the action research arm test. Neurorehabilitation and Neural Repair. 22 (1), 78-90 (2008).
- Giggins, O. M., Persson, U. M., Caulfield, B. Biofeedback in rehabilitation. Journal of NeuroEngineering and Rehabilitation. 10, 60 (2013).
- Rayegani, S. M., et al. Effect of neurofeedback and electromyographic-biofeedback therapy on improving hand function in stroke patients. Topics in Stroke Rehabilitation. 21 (2), 137-151 (2014).
- Pfeufer, D., et al. Training with biofeedback devices improves clinical outcome compared to usual care in patients with unilateral TKA: a systematic review. Knee Surgery, Sports Traumatology, Arthroscopy. 27 (5), 1611-1620 (2018).
- Huang, H., Lin, J. J., Guo, Y. L., Wang, W. T. J., Chen, Y. J. EMG biofeedback effectiveness to alter muscle activity pattern and scapular kinematics in subjects with and without shoulder impingement. Journal of Electromyography and Kinesiology. 23 (1), 267-274 (2013).
- Oravitan, M., Avram, C. The effectiveness of electromyographic biofeedback as part of a meniscal repair rehabilitation programme. Journal of Sports Science and Medicine. 12 (3), 526-532 (2013).
- Novak, C. B., von der Heyde, R. L. Evidence and techniques in rehabilitation following nerve injuries. Hand Clinics. 29 (3), 383-392 (2013).
- Dumanian, G. A., et al. Targeted reinnervation for transhumeral amputees: current surgical technique and update on results. Plastic and Reconstructive Surgery. 124 (3), 863-869 (2009).
- Kuiken, T. A., et al. Targeted muscle reinnervation for real-time myoelectric control of multifunction artificial arms. JAMA. 301 (6), 619-628 (2009).
- Miller, L. A., et al. Control of a six degree of freedom prosthetic arm after targeted muscle reinnervation surgery. Archives of Physical Medicine and Rehabilitation. 89 (11), 2057-2065 (2008).
- Kuiken, T. A., et al. Targeted reinnervation for enhanced prosthetic arm function in a woman with a proximal amputation: a case study. Lancet. 369 (9559), 371-380 (2007).
- Scheme, E., Englehart, K. Electromyogram pattern recognition for control of powered upper-limb prostheses: state of the art and challenges for clinical use. Journal of Rehabilitation Research & Development. 48 (6), 643-659 (2011).
- Simon, A. M., Lock, B., Stubblefield, K. A. Patient training for functional use of pattern recognition-controlled prostheses. Journal of Prosthetics and Orthotics. 24 (2), 56-64 (2012).
- Simon, A. M., Hargrove, L. J., Lock, B. A., Kuiken, T. A. Target Achievement Control Test: evaluating real-time myoelectric pattern-recognition control of multifunctional upper-limb prostheses. Journal of Rehabilitation Research & Development. 48 (6), 619-627 (2011).
- Johnson, S. S., Mansfield, E. Prosthetic training: upper limb. Physical Medicine and Rehabilitation Clinics of North America. 25 (1), 133-151 (2014).
- Kapelner, T., et al. Motor Unit Characteristics after Targeted Muscle Reinnervation. PLoS ONE. 11 (2), 0149772 (2016).
- Sturma, A., et al. A surface EMG test tool to measure proportional prosthetic control. Biomedizinische Technik. Biomedical Engineering. 60 (3), 207-213 (2015).
- Prahm, C., Kayali, F., Sturma, A., Aszmann, O. PlayBionic: Game-Based Interventions to Encourage Patient Engagement and Performance in Prosthetic Motor Rehabilitation. PM&R. 10 (11), 1252-1260 (2018).
- Roche, A. D., et al. A Structured Rehabilitation Protocol for Improved Multifunctional Prosthetic Control: A Case Study. Journal of Visualized Experiments. (105), e52968 (2015).
Réimpressions et Autorisations
Demande d’autorisation pour utiliser le texte ou les figures de cet article JoVE
Demande d’autorisationThis article has been published
Video Coming Soon
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.