Method Article
バイオニック再建を受けた全身性神経叢損傷患者のリハビリテーションツールとしての表面筋電図バイオフィードバック
要約
世界的な上腕叢損傷患者におけるバイオニック再建後の最適な機能的転帰は、構造化されたリハビリテーションプロトコルに依存する。表面筋電図ガイドトレーニングは、EMG信号の振幅、分離、一貫性を向上させ、機能しない手の選択的切断後に補綴針を制御し、駆動する可能性があります。
要約
世界的な上腕叢損傷および生物学的治療選択肢の欠如を有する患者において、機能のない手の選択的切断および補綴との置換を含むバイオニック再建が最近説明されている。最適な補綴機能は、患者の腕の残留筋肉活動が後で人工機能に変換されるので、構造化されたリハビリテーションプロトコルに依存する。表面筋電図(sEMG)バイオフィードバックは脳卒中後のリハビリテーション中に使用されてきましたが、これまでのところ複雑な末梢神経損傷を有する患者では使用されていません。ここでは、sEMG信号の同定から最終補綴トレーニングに至るまで、バイオニック再建に適したグローバルな上腕叢損傷患者に対して実施されたリハビリテーションプロトコルを紹介する。この構造化されたリハビリテーションプログラムは、複雑な神経根の強迫傷害、異常な再内気および解剖学的再建(神経移植の場合と同様に)後に認知的に衰弱するプロセスであるかもしれない運動再学習を促進する。手術)。sEMGバイオフィードバックを用いたリハビリテーションプロトコルは、患者が標的筋肉の再インナー化プロセスの進展を認識している新しい運動パターンの確立を補助する。さらに、かすかな信号はまた、sEMGバイオフィードバックを使用して訓練され、改善され、臨床的に「役に立たない」筋肉(英国医学研究評議会[BMRC]スケールで筋力M1を示す)を、器用な人工手制御の対象となる。さらに、バイオニック再構成に成功した後の機能的結果スコアを本稿で示す。
概要
脊髄からの神経根の外傷性障害を含む世界的な上腕叢損傷は、ヒトで最も重度の神経損傷の1つを表し、通常、人生の全盛期の若い、そうでなければ健康な患者に影響を与える1、2.神経根の数によっては、脳から腕と手への神経結合が中断されるので、完全な上肢麻痺が起こる可能性がある。伝統的に、神経根の強迫は、悪い結果3に関連付けられてきました。過去数十年以内に微小外科神経技術が地面を得ることにより、外科的結果が改善され、肩および肘の有用な運動機能は通常4、5を回復する。最も遠く離れている手の本質的な筋肉は、典型的には、軸を再生する前に不可逆的な萎縮をもたらす脂肪変性を受ける6.このような場合には、機能のない「プレクサス」手の選択的切断およびメカトロニクスハンドとの置換を含むバイオニック再建が、7,8に記載されている。臨床的に有意でない患者の前腕の残留筋活動(アイソメトリック収縮、英国医学研究評議会[BMRC]スケールのM1)は、電離性電極を感知する経皮電極からピックアップされる。その後、人工手9の様々な動きに翻訳.
十分な表面筋電図(sEMG)信号は、最初の相談時に存在してもよい。しかし、場合によっては、選択的神経および筋肉移動7を行う追加のシグナルを確立する必要がある。いずれの場合も、プロセスの最後にsEMG信号の一貫性とその後の最適な補綴機能を確保するために、構造化されたリハビリテーションプロトコルが必要です。神経根の強迫と異常な再内来に続く大きな課題は、神経移植手術後だけでなく、ターゲット筋肉の揮発性制御を可能にする新しい運動パターンの確立です。sEMGバイオフィードバック法は、脳卒中10のリハビリテーションに広く用いられてきた。この方法は、筋肉の衰弱および/またはアンタゴニストの共活性化のために気付かれない筋肉活動の直接視覚化を可能にする。それによって患者が弱い筋肉を訓練することを奨励し、モータータスク11の正しい実行に正確なフィードバックを提供する。
最近の出版物では、sEMGバイオフィードバックが複雑な末梢神経損傷12のリハビリテーションにも使用される可能性があることが初めて示された。sEMGバイオフィードバックは、神経移植手術後の再導入プロセスの進展を患者に認識させる非常に有用な方法であると考えています。また、以前は患者に役に立たなかったかすかな筋肉活動は、sEMGバイオフィードバックを用いて後の人工的なコントロールのために訓練され、強化され、臨床医と患者の両方に気付かれなかった筋肉活動の具体的な視覚化を可能にする。.したがって、トレーニングの進捗状況は十分に理解され、文書化される可能性があります。さらに、筋肉の活動に直接フィードバックを使用すると、臨床医は、関連する信号振幅と一貫性と様々な運動コマンドを相関させ、将来的に堅牢な補綴制御を可能にする最良のモータ戦略を確立することができます。要約すると、この方法の目的は、後で人工手を駆動する患者のsEMG信号の理解、認識および制御を高めることによって、リハビリテーションプロセスを容易にすることです。
プロトコル
このリハビリテーションプロトコルの臨床実施は、ウィーン医科大学の倫理委員会(倫理的投票番号:1009/2014)によって承認され、ヘルシンキ宣言によって設定された基準に従って実施されました。すべての患者は、この研究に参加することに書面によるインフォームドコンセントを提供しました。
注:Aszmann et al.7およびHruby et al.8,13による以前の出版物は、バイオニック再建に関する概念、治療アルゴリズム、および心理社会的前提条件を詳細に説明しています。材料の表は、提案されたリハビリテーションプロトコルで使用されるすべての材料と機器を参照しています。
1. 初期相談時の患者評価
- 患者の評価、リハビリテーションおよび訓練のすべてのステップのために、患者が妨害なしで静かな雰囲気の中で一人であるオフィスまたは検査室を見つける。患者を検査し、sEMGバイオフィードバックシステムをセットアップするのに十分なスペースを確保してください。
- 傷害のメカニズムと最初のケアを含む患者からの詳細な症例履歴を取得し、以前の神経修復手術、日常生活における主観的な障害に関する報告。
- 生物学的治療の選択肢が失敗したバイオニック再建(すなわち、神経修復、神経移植、二次的な再建は無駄な上肢機能をもたらす)の患者のみを考慮してください。中枢神経系への同時損傷、患部の不安定な骨折、未治療および/または弾力性のある精神的健康問題、薬物中毒、コンプライアンスの欠如、長期的なリハビリテーションへのコミットメントを持つ患者を除外プログラム。
- 現在の上肢機能に焦点を当てた詳細な臨床検査を行う。BMRCグレーディングスケールを使用して、影響を受けた腕と手のすべての主要な筋肉の機能を臨床的に評価します。
- 再建外科医、整形外科医、理学医、心理学者、理学療法士からなる学際的なチームで、生物学的治療の選択肢が可能かどうかを評価します。筋電義手の機能性は、生物学的手のそれと比べることは不可能であることを患者に説明する。
- バイオニック再建に関する彼/彼女のモチーフと視点について患者に尋ねる(患者がバイオニックのプロセスを通過するために心理社会的に適合しているかどうかを評価するために、心理学者との構造化されたインタビューを含む以前の出版物13を参照してください)再構築)。
- 神経移植手術に適した生存可能な軸子の存在を示す主要末梢神経の神経軸に沿ってTinel徴候を引き出すことができるかどうかを評価する。
- 患者評価とは別に、検出可能なEMG信号の可用性に依存するプロセス全体の可能なタイムラインをあいまいに概説します。心理的なサポート、姿勢トレーニング、残りの筋肉の強化などの他の介入が示された場合は、できるだけ早く開始してください。
2. sEMG信号の同定
- 静かな部屋のテーブルにsEMGバイオフィードバックのためのシステムを設定します。これは、スタンドアロン デバイスでも、コンピュータに接続されているデバイスでもかまいます。コンピュータを使用する場合は、すべてのケーブルを接続して EMG デバイスをコンピュータに接続し、コンピュータ上の適切なソフトウェアを起動します。
- インピーダンスを減らすには、それぞれの体の部分を慎重に剃ったり、剥離ジェルや濡れたペーパータオルで死んだ皮膚細胞をやさしく取り除くことによって、患者の皮膚を準備します。
- EMGデバイスおよび関連するコンピュータソフトウェアの機能を患者に説明する。
- 患者をコンピュータ画面の前に配置します。
- 患者に手の動きを考えてもらい、特定の行動(手首を伸ばす、拳を作る、親指を曲げるなど)を行う筋肉を収縮させようとします。手。(弱い)筋肉の収縮のために彼/彼女の前腕を触診する。
- 正確な皮膚位置にsEMG電極を置き、例えば、手首と指を伸ばすことを考える際に、後部伸張室5cmの肘関節に筋肉の収縮を触診することができる。
注:sEMG活性は濡れた電極および乾燥した電極で検出されるかもしれませんが、乾燥した電極は、最適な位置を確認するために皮膚上で簡単に動かすことができるので、試験のために準備されます。 - 筋肉の収縮を引き出すために、前に使用したモーターコマンド(すなわち、手首と指の延長)を繰り返します。
- コンピュータ画面上のEMG信号を観察し、患者が特定のアクション(すなわち、手首と指を伸ばす)を行うことを意図した筋肉を収縮させようとすると、振幅が一貫して増加するかどうかを確認します。
- 振幅が十分に高くない場合(バックグラウンドノイズ12の2−3倍未満)または信号が一貫していない場合は、同じ電極位置を持つ他のモータコマンドを試して、より高い振幅が得られるかどうかを確認します。
- 別の筋肉または筋肉群の手順を繰り返します。例えば、sEMG電極を前腕のボラー面に動かし、それを陽極筋の上に置き、患者に前腕の先延ばしを試みるように頼みます。コンピュータ画面上の信号を観察し、患者がこの動きを考えるとき振幅が繰り返し増加するかどうかを確認します。
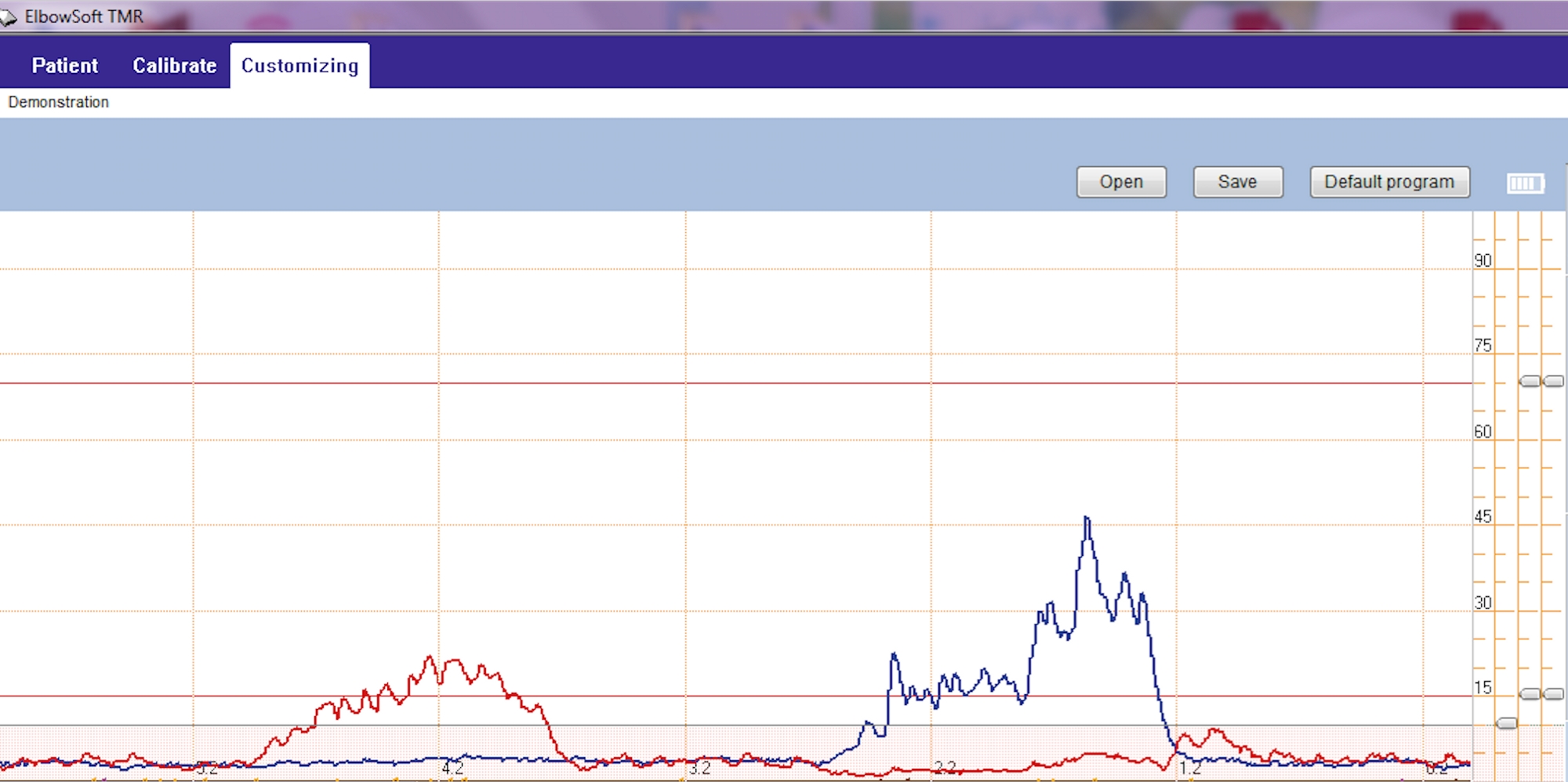
注:一部の患者では、筋肉の活動は触知可能ではありません。ここでは、3つ以上のsEMG電極を前腕の揮発性、後部および放射状の側面に配置し、電極位置のわずかな変化であっても振幅変化のためのすべての信号を注意深く観察する必要があります(図 1を参照してください)。

図1:コンピュータ画面上のEMG信号のスクリーンショット。
EMG活性を同定するために、患者の前腕に2つ以上の電極を置き、様々な動きを試みるように求めることができる。この特定のケースでは、前腕の揮発性の側面の電極は、患者が手を閉じようとすると、コンピュータ画面に表示される最初の赤波によって反射されるEMG活動を感知する。この患者における信号分離は、前腕の後部側面に置かれた第2の電極に相当する青色信号が閾値に達しないため、満足である。患者が手を開くことを考えると、青信号の振幅はしきい値を超え、赤信号はほとんど非アクティブのままである。この図のより大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
- また、神経移動のように異常な再内向きと解剖学的再構成が部分的に非化された筋肉に神経入力を変更しているように、「正常な」解剖学とは異なるモーターコマンドと電極位置を試してみてください。
- 前腕に筋肉活動が見つからない場合は、上腕と肩ガードルの手順を繰り返します。
注:一部の患者では、sEMGシグナルは見つかりません。これらの中で、神経および筋肉の移動は、新しいEMG信号部位を確立するために行われる必要がある(詳細な外科的概念は7の他の場所で見つかるかもしれない)、6−9ヶ月間信号トレーニングを遅らせる。器用な人工手制御のために少なくとも2つの分離可能なEMG信号が必要です。
3. sEMG誘導信号トレーニング
注:sEMG誘導信号トレーニングのトレーニングセッションは、これは正常な運動学習を妨げている筋肉疲労につながるので、30分を超えてはなりません。記載されたステップは、信頼性の高い補綴制御のために後で必要に応じて良好な神経筋の協調を確保するために、長期間にわたって繰り返される必要があります。
- 2つ以上のEMGシグナルが同定されるとすぐに、患者に交互に活性化するよう促す(図2A参照)。プロシスを確実に駆動するには、独立したEMG信号を干渉なしで制御する必要があります。
- 各信号の電圧ゲインを個別に調整して、トレーニング中にすべての信号に対して同様の振幅しきい値を達成し、患者にとって信号の分離と理解を容易にします。
- 繰り返し、患者に人工手の力学を説明する:わずかな筋肉の収縮は最終的に改善された信号分離につながり、筋力、すなわち信号の振幅よりも好ましい必要があります。

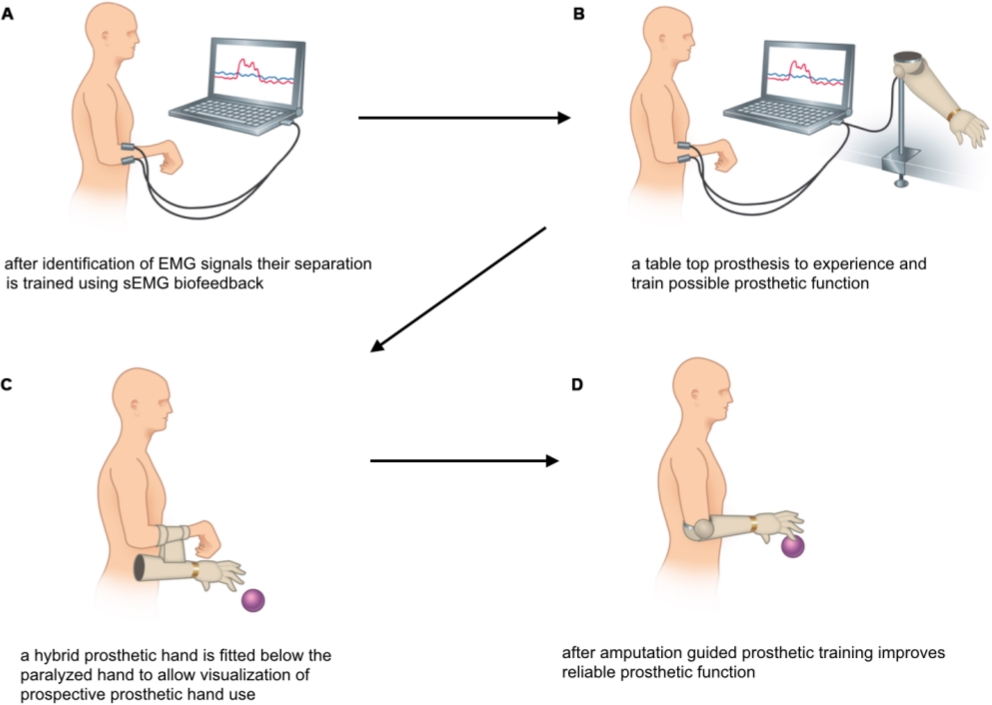
図2:バイオニック手再建患者に対するsEMG誘導リハビリテーション
(A)筋肉活動を直接可視化すると、特定の標的筋に対する最高のEMG振幅を特定するために様々な運動コマンドが試みられ、異なる信号位置を比較することができる。(B)テーブルトップ補綴物を用いて、患者の腕のEMG活性は、人工機能に直接変換される。(C)ハイブリッド義手のフィッティングにより、患者は将来の人工手の使用を視覚化し、理解することができます。(D)人工装用再構成後、EMG信号はsEMGバイオフィードバックまたは人工手自体でトレーニングおよび最適化することができます。この図はSturmaら12から変更され、神経科学のフロンティアの許可を受けて再現された。この図のより大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
- コンピュータ画面上のEMG信号を観察し、特定の動きを試みる際に2つの信号が共活性化されているかどうかを患者に認識させます。各EMG信号は特定の人工作用にリンクされているため、1つの特定の作用の試行中に2つの信号が共活性化されるべきではないことを患者に説明する。従って共活性化された信号は患者によって望まれる行動をもたらさない。
- 異なる(わずかな)動きを試してみて、信号分離に関してどの正確な動きパターンが最良のものかを観察するように患者に指示します。患者にこれらの動きを訓練するよう奨励する。
- 患者に、トレーニングの開始時に完全な信号分離はありそうにないが、多くの繰り返しで改善されることを知らせる。
注意:筋力が複雑な神経損傷とかすかな筋活動を有する患者では、より速く減少する可能性があるため、リラクゼーションの段階を許可する。 - 改善された信号の一貫性によって、筋肉および信号をさらに強めるためにより高い信号振幅を生成するように患者に指示する。
- 一貫したEMG信号分離および固体制御によって、対応するEMGソフトウェアおよび患者の前腕/腕に置かれる電極に接続されるテーブル上の補綴物を取付ける。これにより、EMG活性が機械的補綴機能に直接変換されます(図2Bおよび図3を参照)。

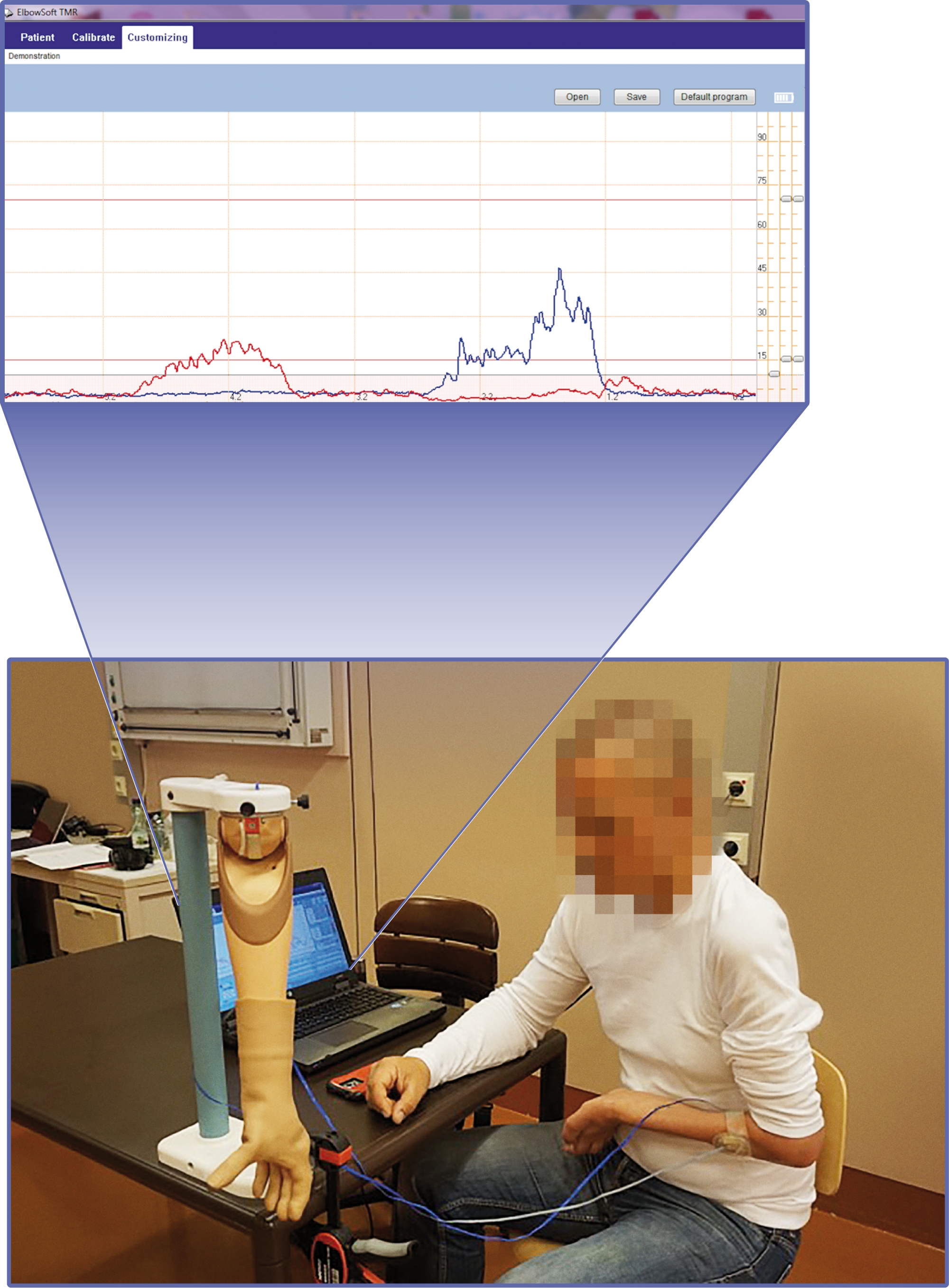
図3:テーブルトップの補綴物の前にいる患者と、コンピュータ画面上の彼の2つの信号のスクリーンショット。
患者の前腕に、2つの電極はEMG活動を感知する。これらの2つの信号は、コンピュータ画面上(赤と青)に色分けされたグラフとして表示され、同時に人工運動に変換され、患者が信号品質と補綴制御の関係を理解することができます。この図のより大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
- 直接制御を備えた筋電補綴物が1つの電極の入力(すなわち、1つの電極から検出された筋肉活動)を使用して、1つの人工運動を制御することを患者に教育する。
- 動き速度を比例制御する装置が選択された場合に備えて、コンピュータ画面上の信号の外観(主に振幅の高さ)と人工運動の速度/強度との相関関係を患者に認識させます。
注:利用可能なEMG信号の数と最終的な人工デバイスの自由度に応じて、これらの自由度を切り替える方法を使用する必要がある場合があります。自由度を切り替える1つの頻繁に使用される方法(例えば、手を開く/プロネーション/スピネーションに近い)は、共収縮14としても知られている2つの筋肉の同時収縮を介してである。 - 列車の共同収縮。患者がコンピュータ画面上のEMG信号と補綴物を観察してみましょう。人工装具が動かない場合、すなわち、共収縮中に開閉すると、患者はそれを正しく行っている。
4.ハイブリッドハンドフィッティングと人工トレーニング
- 信頼できる補綴制御のために最適であると定義されている患者の皮膚の電極位置をマークし、整形外科技術者がこれらの正確な電極位置で設計された予備的な人工ソケットを製造できるようにします。
- 機能していない「プレクサス」の手の上または下に個別に調整されたソケットを持つハイブリッド人工手を取り付けます(図2C参照)。
- 同時にEMGソフトウェアプログラムを実行して、患者に自分の行動を認識させる。
- 交互に異なる人工的な動きを訓練する。電極はまた、無意識の共収縮を避けるために、上腕と肩ガードルに沿って隣接する筋肉に配置することができ、着用時間の増加に伴って上肢全体の疲労につながります。
- サポートされている人工デバイスの重量で、簡単な人工的な動き(共同収縮なしで手を開く/閉じるだけ)から始めます。
- 肘が交互に伸びたり曲がったりするなど、異なる腕の位置で簡単な人工的な動きに移ります。さまざまな腕の位置を調節するときの信号の不一致を患者に認識させ、すべての位置の信号の一貫性を訓練する。
注:異なる筋肉または筋肉群の意図しない共活性化の後、しばしば異常な再内向性のために起こり、協調運動を妨げ、適切な筋肉活動を無効にする15。かすかな意図しない筋肉の収縮は、sEMGセンサーによって感知され、人工運動に変換される腕を動かすときにしばしば起こる。これは、以下に説明するようにEMGトレーニングと筋肉強化を使用してリハビリテーション中に適切に対処されていない場合、貧弱な補綴制御をもたらす可能性があります。 - 異なる腕の位置で面倒な人工制御の場合は、徹底的にコンピュータ画面上のEMG信号を観察し、患者に指摘し、1つ以上の筋肉の意図しない収縮で、信号遠足につながる。患者がまだ扱うことができ、ゆっくりと時間の経過とともに腕の位置を変えることができる位置のEMG信号の精密な活性化を訓練する。
- 肘の屈曲(および肩の筋肉)の筋力トレーニングを行う場合は、腕を持ち上げながら補綴制御に使用される筋肉の同時活性化が観察される場合。より強い筋肉(すなわち、単純な持ち上げ作業中に最大の自発的な力で働かない筋肉)は、通常、信号のより良い分離に寄与することを患者に説明する。また、上肢の筋肉が弱すぎて人工装具を立体空間で動かしたり、肩を安定させながら筋力トレーニングを行ったりします。
- 小さなボックスをピックアップし、小さなオブジェクトを操作するなどの簡単な把握タスクを続行します (図 2Cを参照)。
- 最後に、ドアを開けたり、タオルを折ったり、ボトルを開けたりするような日常生活の簡単な作業を訓練します。
注:麻痺した手が邪魔になるという事実のために多くのタスクが制限される可能性があり、患者がハイブリッド義手に加えて自分の手の重量を持ち上げる必要があるため、デバイスはかなり重く感じるかもしれません。
- 信号品質が不十分な場合は、コンピュータ画面上の信号トレーニングに戻る方が有益な場合があります。すべてのタスクでは、特にコンピュータ画面上の信号の共同活性化を探し、さらに信号の依存性を向上させます。
- ハイブリッド義手を使用して上肢機能を評価し、テスト結果のビデオを記録します。さらに、麻痺した手に対して同じ評価を使用して、機能しない手の補綴物の交換から期待される機能的利益を文書化します。
5. 選択的切断と人工手の交換
- 患者の理学療法士/EMGトレーナー、外科医が担当する学際的なチームで、様々なEMG信号(経膜、経膜、まれに、グレノフメラル)の部位に応じて切断のレベルを正確に計画する切断と患者の期待に精通した心理学者のために。
- 計画切断に関する未解決の質問があるかどうかを患者に尋ね、切断前にいつでもこの決定を取り消す可能性があることを明確に伝えます。
- 機能しない手とビデオテープの結果を使用して上肢機能の標準化された評価を実行します。
- ハイブリッド義手とビデオテープを使用して上肢機能の標準化された評価を実行し、将来の人工装具の利点を文書化します。
- 前述の7,8のように機能のない四肢の選択的切断を行う。
- 術後の創傷治癒を許可し、患者が改善された上肢の移動性のために隣接する関節を訓練させる。4−6週間後、上記のようにEMG信号をトレーニングし、電極位置に最適なホットスポットを定義します。
注:これらの電極の位置とモータコマンドは、切断前に見つかったものとは若干異なる場合があります。 - 整形外科技術者が、以前に定義したEMG電極位置を使用して最終的な人工ソケットを設計してみましょう(図4を参照)。
注:推奨される特定のソケット設計はありませんが、電極の正確な位置と切り株の皮膚への接着は、上腕叢患者が神経筋インターフェースを大幅に減少させるので最も重要です。

図4:可能な補綴およびソケット設計の例。
(A)この患者の補綴は炭素製の外皮から成っている。(B)人工手の代わりに、患者は、開閉するフックを把握ツールとして使用することを好む。(C, D)2つの電極は補綴物に統合される。患者はそれに2つの穴が付いているシリコーンライナーを身に着け、2つの電極との直接の皮の接触を可能にする(図示されない)。この図のより大きなバージョンを表示するには、ここをクリックしてください。
{kind=link}
- 義足トレーニングを開始します。
- 繰り返しますが、サポートされている人工デバイスの重量で、単純な人工的な動き(共同収縮なしで手を開く/閉じるだけ)から始めます。
- 肘が交互に伸びたり曲がったりするなど、異なる腕の位置で簡単な人工的な動きに移ります。
- 小さなボックスをピックアップし、小さなオブジェクトを操作するなどの簡単な把握タスクを続行します (図 2Dを参照)。
- 最後に、日常生活の訓練活動は、再び(ドアを開くとして)かなり単純なタスクから始まり、患者が自分の特定の生活状況に関連すると考える複雑さとタスクをゆっくりと追加します。
- 人工装具の3ヶ月後に、義手を用いて上肢機能の標準化された評価を繰り返し、結果のビデオを記録する。
結果
複数の神経根を含む重度の神経叢損傷を有する6人の患者において、sEMGバイオフィードバックを用いて提示されたリハビリテーションプロトコルが正常に実施された。詳細な患者特性は表1に示されています。図2は、構造化されたリハビリテーションプロトコルの様々な段階と、その実装に関する詳細な説明を示す。
バイオニック再構成前後の手機能の改善を実証するために、グローバル上肢機能を評価する標準化された評価は、機能のない「プレクサス」手の選択的切断前の2つの時点で行われた。成功した人工再建とリハビリテーションの後。アクションリサーチアームテスト(ARAT)は、もともと手制御16の認知障害を有する患者におけるグローバル上肢運動機能を評価するために開発された。ヨズバティランらの標準化されたアプローチは、我々の研究で使用された。ARATは、日常生活に近いタスクを含む4つの異なるセクションで構成されています。テストは、タスクのパフォーマンスを 0−3 から評価するオブザーバーによって時間が与えられ、3 は正常な機能を示します。最大57点は、運動機能16の障害を示す達成可能である。sEMGバイオフィードバックと各患者の詳細な結果を伴う治療セッションの数は、表2に示されています。
sEMGバイオフィードバックを用いた提供されたリハビリテーションプロトコルに対する患者の満足度は直接測定されなかったが、6人の患者全員が神経移植手術後の再導入プロセスを理解するのに非常に役立つと報告された。以前は臨床的に使用されなかった非常にかすかな活動で筋肉の収縮を訓練する。
| ケース番号 | 性別、年齢(年) | 事故の種類 | 病変の種類 | 最初の再建後のバイオテクノロジーインターフェースを改善する手術は、手の機能を改善するために失敗しました | |
| 1 | m, 32 | 高さから落ちる | C7−T1のアヴルジョン;鎖骨神経叢の牽引傷害 | 前腕の選択的切断 | |
| 2 | m, 32 | オートバイ事故 | BPの3つのトランチの破裂 | 前腕エクステンサーコンパートメントに転送された無料のグラシリス筋&神経系神経の深部の神経化は、神経を観察する。前腕の選択的切断 | |
| 3 | m, 55 | オートバイ事故 | C5−T1のアヴルション | 上腕の選択的切断 | |
| 4 | m, 38 | オートバイ事故 | 根C5−C8への大規模な損傷;T1の強迫 | 前腕の選択的切断 | |
| 5 | m, 27 | オートバイ事故 | アヴルシオン C8−T1 | 前腕の選択的切断 | |
| 6 | m, 43 | オートバイ事故 | C6−T1のアヴルション | 三頭筋の屈頭筋への移植と二頭筋の上頭筋への移植は、人工フィッティングを改善するために。腕の選択的切断(肩の排泄) | |
表1:患者特性。すべての患者において、生物学的再建は生物学的治療の選択肢の不能性のために開始された。前腕と上腕にEMG信号を確立する手術には、選択的神経および筋肉移動が含まれ、筋電義手を駆動する。選択的切断は、残留筋活動に応じて、経順または経湿器レベルで行われる。この患者群で行われたすべての選択的神経移植は成功した。この表はSturmaら12から変更され、神経科学のフロンティアの許可を受けて再現された。
| ケース番号 | ベースラインでのアラット | フォローアップ時のアラト | sEMGトレーニング開始 | セラピーセッションの総数(各30分) | |
| 1 | 7 | 35 | 最初の相談直後 | 24 | |
| 2 | 0 | 15 | 最初の相談の直後に1つの信号でトレーニング;第2の信号は、自由なグラシリス転移+神経伝達の9ヶ月後に利用可能でした | 30 | |
| 3 | 0 | 19 | 最初の相談直後 | 16 | |
| 4 | 1 | 22 | 最初の相談直後 | 20 | |
| 5 | 9 | 42 | 生物学的再建が失敗したバイオニック再建を目指す決断直後 | 20 | |
| 6 | 0 | 17 | 最初の相談直後 | 22 | |
| 平均値 (± SD) | 2.83 ± 4.07 | 25.00 ± 10.94 | 22 ± 4.32 | ||
表2:ARATスコアと治療セッション数アクションリサーチアーム試験(ARAT)では、患者は当初、ごくわずかな上肢機能(平均2.83、達成可能な最大57点)を示した。バイオニック再構成後に有用な機能が復元された(平均25.00、57)。この表はSturmaら12から変更され、神経科学のフロンティアの許可を受けて再現された。
ディスカッション
バイオフィードバックアプローチは、脳出血や脳卒中などの中枢病理に起因する(ヘミ)-遺伝性状態に至るまで、いくつかの神経筋疾患のリハビリテーションに広く使用されている18、19から様々な筋骨格系変性症または傷害とその外科的治療20、21、22.興味深いことに、構造化バイオフィードバックの概念は、末梢神経損傷の臨床実践では実施されていない。しかし、正確に複雑な神経損傷のリハビリテーションにおいて、適切なバイオフィードバックを伴う練習、繰り返し、および構造化されたトレーニングプログラムは、正しい運動パターン23を確立する必要がある。
ここでは、前回の研究12では、人工手置換の対象となる生物学的治療選択肢が不足している患者に対してsEMGバイオフィードバックを用いた構造化リハビリテーションプロトコルを提示した。復興。バイオニック再構成のコンテキストでsEMGバイオフィードバックセットアップを使用する最も明らかな利点は、sEMGホットスポットの正確な定義、すなわち、皮膚の位置、すなわち、EMG活性の比較的高い振幅を経時的に測定することができるところから生じる。センサーは前腕全体に沿って容易に動くことができ、前腕の検出可能な筋肉機能が欠落している場合には、上腕と肩のガードルにも同様に、様々なモーターコマンドが交互に試みられる。患者が特定の作用(手首を延長するなど)を行うことを意図した筋肉を収縮させようとすると、電極を配置することができ、そこで(弱い)筋肉の収縮は検査官によって触診される。コンピュータ画面上のEMG信号を観察すると、患者がこの筋肉を収縮させようとすると、信号の振幅が一貫して増加するかどうかを容易に判断できます。振幅が十分に高くない場合、または信号が一貫していない場合は、同じ電極位置を持つ他のモータコマンドが試行されることがあります。針EMGとは反対に、この手順は非侵襲的であり、痛みを伴わない、腕のすべての筋肉/筋肉群に対して繰り返すことができる。異なる筋肉の位置でさまざまなモーターコマンドをテストすると、特定のモータアクションに関連する最高の振幅と再現可能なアクティビティで、EMGホットスポットを識別することができます。最も強いEMG信号を同定した後、これらは、信号分離(2つ以上のEMG信号の共活性化はコンピュータ画面上で起こってはいけません)、信号強度(EMG信号によって反映される)に関するsEMGバイオフィードバックを使用して訓練されてもよい。コンピュータ画面上の振幅)と信号の再現性(筋肉を収縮させる各試みは、それぞれのEMG信号の遠足につながる必要があります)。トレーニングの後の段階で、EMG活動は直接人工機能に変換され、最初にテーブルトップ補綴(図3参照)を使用して、グリップ強度の微調整を可能にする患者に追加のフィードバックを与え、物理的な補綴。
従来の切断患者では、膨大な量の文献が、標的筋再導入(TMR)、すなわち、胸部および上腕の代替筋部位への残留アーム神経の外科的移動が、これらのことから、補綴機能を改善することを示している。再活性化された筋肉は、直感的な運動コマンドの生物学的増幅器として機能し、人工手、手首および肘制御24、25、26、27のための生理学的に適切なEMG信号を提供する.パターン認識制御システムを使用して、これらの再活性化された筋肉の皮膚上に置かれた多数のsEMG信号から抽出されたEMGデータを解読し、より信頼性の高い可逆電を提供する特定の、再生可能なモーター出力に翻訳することができる補綴制御28、29、30。上腕叢の強虫損傷を有する患者におけるEMGシグナル部位および筋電活性の数は非常に限られているので、パターン認識アルゴリズムは、従来の切断患者8に対して行われるように使用されない場合がある。それでも、さらなる研究と改良された技術により、これらのシステムは、既存のかすかな筋肉信号に関するより多くの情報を抽出し、したがって、この独特の患者グループにおいても人工機能を改善することができるかもしれません。
提示されたプロトコルはガイドラインと見なされますが、詳細は患者と利用可能な機器に応じて調整する必要があります。このような神経損傷の後に起こる異常な再内来のために、運動コマンドは必ずしも解剖学的に「正しい」筋肉12の活性化をもたらすとは限らない。例えば、前腕フレクサコンパートメントでEMG活性を観察し、患者が手を開こうとしていた。したがって、EMG信号を識別するために、様々なモータコマンドをテストする必要があります。さらに、残留筋機能(すべての場合において、有用な手の動きを生成するには弱すぎるが)は、患者間で大きく異なり、表2に示すように必要なトレーニング時間のばらつきを引き起こす可能性がある。さらに、補綴装置の選択と制御に使用される電極の数は、信号分離の精度、信号振幅および共収縮の必要性に関する要件を変更する。これは、切断患者31の標準的な人工装少トレーニングでも推奨されているように、信号トレーニング、ハイブリッド補綴トレーニングおよび実際の人工トレーニング中に考慮する必要があります。sEMGバイオフィードバックトレーニングに使用されるデバイスに関しては、補綴制御に必要な信号数を同時に表示し、リアルタイムのフィードバックを与え、コンピュータまたはディスプレイに接続できる場合に適したデバイスを検討しています。画面上の信号自体。トレーニング中に信号ゲインを調整できるデバイスが好ましい。
リハビリテーションの後、すべての患者は日常生活活動中に人工装具を使用することができ、彼らの機能のない手を人工装具12に置き換えるという決定に満足した。この機能改善は、平均ARATスコアが2.83±4.07~25.00±10.94(p= 0.028)の大幅な増加によって反映された。
私たちの視点から、sEMGバイオフィードバックセットアップは、神経損傷およびバイオニック再建に関連する運動回復の認知的に要求されるプロセスを容易にする貴重なツールを提示します。最適なEMG電極位置の同定と筋肉活動の直接可視化による様々な運動コマンドの試験は、臨床セットアップにおけるsEMGバイオフィードバックを使用して大幅に簡素化されます。sEMGバイオフィードバックは、生物学的上肢機能10、12のリハビリテーションにも使用されてもよいが、バイオニック再構成の過程におけるその応用は特に有効であると考えられる。最も重要なことは、トレーニング中に活性化されたsEMG信号は、後で各患者のために個別にカスタマイズされた人工ソケット内の電極位置を反映します。したがって、トレーニング中にこれらの信号を繰り返し活性化すると、将来の補綴処理と手動容量が増加する可能性が高くなります。この筋肉活動の直接可視化はまた、患者が筋電性手制御の概念を理解することを可能にし、彼/彼女はより意識的にトレーニングの進捗状況に従うことができます。
将来的には、私たちの提示されたリハビリテーションプロトコルは、機能的な結果を高めるために、より高度なツールで拡張される可能性があります。これには、活性化ヒートマップ32を介して電極配置のプロセスを容易にする高密度sEMG記録、EMG活性を評価するためのさらなる仮想ソリューション30、33、およびトレーニングを強化するための深刻なゲームが含まれる場合があります。モチベーション34.さらに、パターン認識アルゴリズムなどの人工制御のための新しい技術も28、30、35を使用することができる。しかし、神経筋インターフェースの低下により、健康な切断患者のために設計された現在市販されているシステムがこの特定の患者群における人工機能を著しく改善するかどうかは明らかではない。今後の研究は、重度の上腕叢損傷患者のリハビリテーションのための記載された新しい技術の適用性と利点を評価する必要があります。さらに、より高い患者数を持つ制御された試験はまた、より高いレベルの証拠とsEMGバイオフィードバックを使用して現在のプロトコルの肯定的な効果を実証することができます。
開示事項
著者は何も開示していない。
謝辞
この研究は、オーストリア研究技術開発評議会のクリスチャン・ドップラー研究財団とオーストリア連邦科学研究経済省の資金提供を受けました。原稿に含まれるイラストの準備と、元の記事12に提示されたデータを複製する許可を与える神経科学のフロンティアにアロン・サベニーに感謝しています。
資料
| Name | Company | Catalog Number | Comments |
| dry EMG electrodes | Ottobock Healthcare, Duderstadt, Germany | 13E202 = 50 | The EMG electrodes used in this study were bipolar and included a ground. They can be used both for EMG training with the Myoboy and for the control of a prosthetic device. |
| Myoboy | Otto bock Healthcare, Duderstadt, Germany | Myoboy | This device that can be used as stand alone device or with a computer. It allows to display EMG activity while using the dry EMG electrodes that can also be impeded in the prosthetic socket. |
| SensorHand Speed | Ottobock Healthcare, Duderstadt, Germany | All patients used this commercially available myoelectrical prosthesis as their standard prosthetic device and during functional testing. Fitting of patients undergoing this procedure is, however, not restricted to this device. | |
| Standard laptop with Microsoft operating system | Usually, devices for EMG biofeedback connected to a computer do not require much computing power and thus work on any regular laptop | ||
| TeleMyo 2400T G2 | Noraxon, US | A surface EMG biofeedback set-up used in our protocol, connected to TeleMyo-Software, which displays the recorded EMG activity as color-coded graphs on the computer screen | |
| wet EMG electrodes | Ambu | Ambu Blue Sensor VL Adhesive Electrodes | These adhesive electrodes can be used in combination with many different EMG biofeedback devices, including the TeleMyo 2400T. While they cannot be moved easily, the wet contacts usually allow to detect very faint EMG signals as well. |
参考文献
- Bertelli, J. A., Ghizoni, M. F. Results and current approach for Brachial Plexus reconstruction. Journal of Brachial Plexus and Peripheral Nerve Injury. 6 (1), 2 (2011).
- Birch, R. Traction lesions of the brachial plexus. British Journal of Hospital Medicine. 32 (3), 140-143 (1984).
- Narakas, A. O. The treatment of brachial plexus injuries. International Orthopaedics. 9 (1), 29-36 (1985).
- Terzis, J. K., Barbitsioti, A. Primary restoration of elbow flexion in adult post-traumatic plexopathy patients. Journal of Plastic, Reconstructive & Aesthetic Surgery. 65 (1), 72-84 (2012).
- Tung, T. H., Mackinnon, S. E. Nerve Transfers: Indications, Techniques, and Outcomes. The Journal of Hand Surgery. 35 (2), 332-341 (2010).
- Terzis, J. K., Vekris, M. D., Soucacos, P. N. Brachial plexus root avulsions. World Journal of Surgery. 25 (8), 1049-1061 (2001).
- Aszmann, O. C., et al. Bionic reconstruction to restore hand function after brachial plexus injury: a case series of three patients. Lancet. 385 (9983), 2183-2219 (2015).
- Hruby, L. A., et al. Algorithm for bionic hand reconstruction in patients with global brachial plexopathies. Journal of Neurosurgery. 127 (5), 1163-1171 (2017).
- Bergmeister, K. D., et al. Broadband Prosthetic Interfaces: Combining Nerve Transfers and Implantable Multichannel EMG Technology to Decode Spinal Motor Neuron Activity. Frontiers in Neuroscience. 11, 421 (2017).
- Kim, J. H. The effects of training using EMG biofeedback on stroke patients upper extremity functions. Journal of Physical Therapy Science. 29 (6), 1085-1088 (2017).
- Merletti, R. P. P. . Electromyography: Physiology, Engineering, and Non-Invasive Applications. , (2004).
- Sturma, A., Hruby, L. A., Prahm, C., Mayer, J. A., Aszmann, O. C. Rehabilitation of Upper Extremity Nerve Injuries Using Surface EMG Biofeedback: Protocols for Clinical Application. Frontiers in Neuroscience. 12, 906 (2018).
- Hruby, L. A., Pittermann, A., Sturma, A., Aszmann, O. C. The Vienna psychosocial assessment procedure for bionic reconstruction in patients with global brachial plexus injuries. PLoS ONE. 13 (1), 0189592 (2018).
- Vujaklija, I., Farina, D., Aszmann, O. New developments in prosthetic arm systems. Orthopedic Research and Reviews. 8, 31-39 (2016).
- Shin, Y. B., Shin, M. J., Chang, J. H., Cha, Y. S., Ko, H. Y. Effects of Botulinum Toxin on Reducing the Co-contraction of Antagonists in Birth Brachial Plexus Palsy. Annals of Rehabilitation Medicine. 38 (1), 127-131 (2014).
- Lyle, R. C. A performance test for assessment of upper limb function in physical rehabilitation treatment and research. International Journal of Rehabilitation Research. 4 (4), 483-492 (1981).
- Yozbatiran, N., Der-Yeghiaian, L., Cramer, S. C. A standardized approach to performing the action research arm test. Neurorehabilitation and Neural Repair. 22 (1), 78-90 (2008).
- Giggins, O. M., Persson, U. M., Caulfield, B. Biofeedback in rehabilitation. Journal of NeuroEngineering and Rehabilitation. 10, 60 (2013).
- Rayegani, S. M., et al. Effect of neurofeedback and electromyographic-biofeedback therapy on improving hand function in stroke patients. Topics in Stroke Rehabilitation. 21 (2), 137-151 (2014).
- Pfeufer, D., et al. Training with biofeedback devices improves clinical outcome compared to usual care in patients with unilateral TKA: a systematic review. Knee Surgery, Sports Traumatology, Arthroscopy. 27 (5), 1611-1620 (2018).
- Huang, H., Lin, J. J., Guo, Y. L., Wang, W. T. J., Chen, Y. J. EMG biofeedback effectiveness to alter muscle activity pattern and scapular kinematics in subjects with and without shoulder impingement. Journal of Electromyography and Kinesiology. 23 (1), 267-274 (2013).
- Oravitan, M., Avram, C. The effectiveness of electromyographic biofeedback as part of a meniscal repair rehabilitation programme. Journal of Sports Science and Medicine. 12 (3), 526-532 (2013).
- Novak, C. B., von der Heyde, R. L. Evidence and techniques in rehabilitation following nerve injuries. Hand Clinics. 29 (3), 383-392 (2013).
- Dumanian, G. A., et al. Targeted reinnervation for transhumeral amputees: current surgical technique and update on results. Plastic and Reconstructive Surgery. 124 (3), 863-869 (2009).
- Kuiken, T. A., et al. Targeted muscle reinnervation for real-time myoelectric control of multifunction artificial arms. JAMA. 301 (6), 619-628 (2009).
- Miller, L. A., et al. Control of a six degree of freedom prosthetic arm after targeted muscle reinnervation surgery. Archives of Physical Medicine and Rehabilitation. 89 (11), 2057-2065 (2008).
- Kuiken, T. A., et al. Targeted reinnervation for enhanced prosthetic arm function in a woman with a proximal amputation: a case study. Lancet. 369 (9559), 371-380 (2007).
- Scheme, E., Englehart, K. Electromyogram pattern recognition for control of powered upper-limb prostheses: state of the art and challenges for clinical use. Journal of Rehabilitation Research & Development. 48 (6), 643-659 (2011).
- Simon, A. M., Lock, B., Stubblefield, K. A. Patient training for functional use of pattern recognition-controlled prostheses. Journal of Prosthetics and Orthotics. 24 (2), 56-64 (2012).
- Simon, A. M., Hargrove, L. J., Lock, B. A., Kuiken, T. A. Target Achievement Control Test: evaluating real-time myoelectric pattern-recognition control of multifunctional upper-limb prostheses. Journal of Rehabilitation Research & Development. 48 (6), 619-627 (2011).
- Johnson, S. S., Mansfield, E. Prosthetic training: upper limb. Physical Medicine and Rehabilitation Clinics of North America. 25 (1), 133-151 (2014).
- Kapelner, T., et al. Motor Unit Characteristics after Targeted Muscle Reinnervation. PLoS ONE. 11 (2), 0149772 (2016).
- Sturma, A., et al. A surface EMG test tool to measure proportional prosthetic control. Biomedizinische Technik. Biomedical Engineering. 60 (3), 207-213 (2015).
- Prahm, C., Kayali, F., Sturma, A., Aszmann, O. PlayBionic: Game-Based Interventions to Encourage Patient Engagement and Performance in Prosthetic Motor Rehabilitation. PM&R. 10 (11), 1252-1260 (2018).
- Roche, A. D., et al. A Structured Rehabilitation Protocol for Improved Multifunctional Prosthetic Control: A Case Study. Journal of Visualized Experiments. (105), e52968 (2015).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved