
Method Article
Il biofeedback elettromiografico di superficie come strumento di riabilitazione per i pazienti con lesioni da plesso brachiale globale che ricevono la ricostruzione bionica
In questo articolo
Riepilogo
I risultati funzionali ottimali dopo la ricostruzione bionica in pazienti con lesioni del plesso brachiale globale dipendono da un protocollo di riabilitazione strutturato. L'allenamento elettromiografico guidato di superficie può migliorare l'ampiezza, la separazione e la consistenza dei segnali EMG, che - dopo l'amputazione elettiva di una mano senza funzione - controllano e guidano una mano protesica.
Abstract
Nei pazienti con lesioni del plesso brachiale globali e mancanza di alternative di trattamento biologico, è stata recentemente descritta la ricostruzione bionica, compresa l'amputazione elettiva della mano senza funzione e la sua sostituzione con una protesi. La funzione protesica ottimale dipende da un protocollo di riabilitazione strutturata, poiché l'attività muscolare residua nel braccio di un paziente viene successivamente tradotta in funzione protesica. Il biofeedback elettromiografico superficiale (sEMG) è stato utilizzato durante la riabilitazione dopo l'ictus, ma finora non è stato utilizzato in pazienti con lesioni nervose periferiche complesse. Qui presentiamo il nostro protocollo di riabilitazione implementato in pazienti con lesioni del plessus brachiale globali adatte per la ricostruzione bionica, a partire dall'identificazione dei segnali sEMG alla formazione protesica finale. Questo programma di riabilitazione strutturata facilita il riapprendimento motorio, che può essere un processo cognitivamente debilitante dopo complesse lesioni da avulsione della radice nervosa, aberrante riinnervazione e ricostruzione extra-anatomica (come nel caso del trasferimento del nervo interventi chirurgici). Il protocollo di riabilitazione che utilizza aiuti di biofeedback sEMG nella creazione di nuovi modelli motori mentre i pazienti vengono informati del processo di riinnervazione avanzata dei muscoli bersaglio. Inoltre, deboli segnali possono anche essere addestrati e migliorati utilizzando sEMG biofeedback, rendendo un muscolo clinicamente "inutile" (che presenta la forza muscolare M1 sulla scala del British Medical Research Council [BMRC]) ammissibile per il controllo della mano protesico abile. Inoltre, i punteggi dei risultati funzionali dopo una ricostruzione bionica di successo sono presentati in questo articolo.
Introduzione
Lesioni del plesso brachiale globale tra cui l'avulsione traumatica delle radici nervose dal midollo spinale rappresentano una delle lesioni nervose più gravi negli esseri umani e di solito colpiscono giovani, altrimenti pazienti sani nel fiore degli anni1,2 . A seconda del numero di radici nervose avulse, la paralisi completa dell'arto superiore può derivare dal momento che la connessione nervale dal cervello al braccio e alla mano è interrotta. Tradizionalmente, l'avulsione delle radici nervose è stata associata a scarsi esiti3. Con le tecniche nervose microchirurgiche guadagnando terreno negli ultimi decenni, i risultati chirurgici sono stati migliorati e la funzione motoria utile nella spalla e nel gomito sono di solito ripristinati4,5. La muscolatura intrinseca nella mano, che si trova più dispari, subisce tipicamente una degenerazione grassa con conseguente atrofia irreversibile prima che gli assoni rigeneranti possano raggiungerla6. Per questi casi la ricostruzione bionica, che comprende l'amputazione elettiva della mano "plexus" senza funzione e la sua sostituzione con una mano meccatronica, è stata descritta7,8. L'attività muscolare residua nell'avambraccio di un paziente, che può essere clinicamente insignificante (contrazioni isometriche, M1 sulla scala del British Medical Research Council [BMRC]), viene rilevata dagli elettrodi transcutanei che rilevano l'attività elettromiografica, poi tradotto in vari movimenti di una mano protesica9.
Dopo la consultazione iniziale possono essere presenti segnali elettromiografici (sEMG) sufficienti. In alcuni casi, tuttavia, è necessario stabilire segnali aggiuntivi eseguendo trasferimenti selettivi di nervi e muscoli7. In entrambi i casi, è necessario un protocollo di riabilitazione strutturata per garantire la coerenza del segnale sEMG e la successiva funzione protesica ottimale alla fine del processo. Una sfida importante dopo l'avulsione della radice nervosa e la riinnervazione aberranti così come dopo l'intervento chirurgico di trasferimento del nervo è la creazione di nuovi modelli motori per consentire il controllo volitivo sul muscolo bersaglio. metodi di biofeedback sEMG sono stati ampiamente utilizzati nella riabilitazione dell'ictus10. Questo metodo consente la visualizzazione diretta dell'attività muscolare che altrimenti sarebbe inosservata a causa della debolezza muscolare e/o della co-attivazione di antagonisti. In questo modo incoraggia i pazienti ad allenare i loro muscoli deboli, fornendo un feedback preciso sulla corretta esecuzione dei compiti motori11.
In una recente pubblicazione abbiamo dimostrato per la prima volta che il biofeedback sEMG può essere utilizzato anche nella riabilitazione di complesse lesioni nervose periferiche12. Crediamo che il biofeedback sEMG sia un metodo estremamente utile per rendere un paziente consapevole del processo di riinnervazione avanzata dopo l'intervento chirurgico di trasferimento del nervo. Inoltre, l'attività muscolare debole, che in precedenza non serviva al paziente, può essere addestrata e rafforzata per un successivo controllo protesico utilizzando il biofeedback sEMG, che consente la visualizzazione concreta dell'attività muscolare altrimenti inosservata sia al medico che al paziente . I progressi della formazione possono quindi essere ben compresi e documentati. Inoltre, l'uso di un feedback diretto sull'attività muscolare consente al medico di correlare vari comandi motori con l'ampiezza e la coerenza del segnale associate, stabilendo le migliori strategie motorie per consentire un robusto controllo protesico in futuro. In sintesi, l'obiettivo di questo metodo è quello di facilitare il processo di riabilitazione aumentando la comprensione, la consapevolezza e il controllo di un paziente dei suoi segnali sEMG, che in seguito guideranno una mano protesica.
Protocollo
L'attuazione clinica di questo protocollo di riabilitazione è stata approvata dal comitato etico dell'Università di Medicina di Vienna (numero di voto etico: 1009/2014), Austria e effettuata in conformità con gli standard stabiliti dalla Dichiarazione di Helsinki. Tutti i pazienti hanno fornito un consenso informato scritto alla partecipazione a questo studio.
NOTA: sono disponibili precedenti pubblicazioni di Aszmann et al.7 e Hruby et al.8,13 che descrivono in dettaglio il concetto, l'algoritmo di trattamento e i prerequisiti psicosociali per quanto riguarda la ricostruzione bionica. La tabella dei materiali fa riferimento a tutti i materiali e le attrezzature utilizzati nel protocollo di riabilitazione proposto.
1. Valutazione del paziente al momento della consultazione iniziale
- Per tutte le fasi della valutazione del paziente, riabilitazione e formazione, trovare un ufficio o sala d'esame, dove il paziente è solo in un'atmosfera tranquilla senza disturbi. Assicurarsi di avere spazio sufficiente per esaminare il paziente e impostare il sistema di biofeedback sEMG.
- Ottenere una dettagliata storia del caso dal paziente tra cui meccanismo di lesioni e prima cura, rapporti su precedenti interventi chirurgici di riparazione del nervo, e disabilità soggettiva nella vita quotidiana.
- Si considerino solo i pazienti per la ricostruzione bionica con alternative di trattamento biologico fallite (ad esempio, riparazione dei nervi, trasferimenti nervosi, ricostruzioni secondarie con conseguente inutile funzione dell'arto superiore). Escludere i pazienti con danni simultanei al sistema nervoso centrale, fratture instabili dell'arto colpito, problemi di salute mentale non trattati e/o resilienti, tossicodipendenza, mancanza di conformità e impegno ad aderire a una riabilitazione duratura programma.
- Eseguire un esame clinico dettagliato concentrandosi sulla funzione attuale dell'arto superiore. Valutare clinicamente la funzione di tutti i muscoli principali del braccio e della mano colpiti utilizzando la scala di classificazione BMRC.
- Valutare in un team multidisciplinare composto da chirurghi ricostruttivi, chirurghi ortopedici, fisiatri, psicologi e fisioterapisti se sono possibili alternative di trattamento biologico. Spiega al paziente che la funzionalità di una protesi mioelettrica non può affatto essere paragonata a quella di una mano biologica.
- Chiedere al paziente i suoi motivi e le sue prospettive sulla ricostruzione bionica (vedi una precedente pubblicazione13 tra cui l'intervista strutturata con uno psicologo per valutare se un paziente è psicosocialmente idoneo a passare attraverso il processo bionico ricostruzione).
- Valutare se i segni Tinel possono essere suscitati lungo l'asse neurale dei principali nervi periferici che indicano la presenza di assoni vitali adatti per la chirurgia di trasferimento del nervo.
- Oltre alla valutazione del paziente, anche vagamente delineare una possibile sequenza temporale dell'intero processo, che dipende dalla disponibilità di segnali EMG rilevabili. Se sono indicati altri interventi, come il supporto psicologico, l'allenamento della postura e/o il rafforzamento dei muscoli rimanenti, avviarli il prima possibile.
2. Identificazione dei segnali sEMG
- Impostare un sistema per il biofeedback sEMG su un tavolo in una stanza tranquilla. Può trattarsi di un dispositivo autonomo o di un dispositivo connesso a un computer. Se si utilizza un computer, collegare il dispositivo EMG al computer collegando tutti i cavi e avviare il software appropriato sul computer.
- Per ridurre l'impedimento, preparare la pelle del paziente radendo con cura la rispettiva parte del corpo e/o rimuovendo delicatamente le cellule morte della pelle con un gel peeling o un asciugamano di carta bagnato.
- A breve spiegare la funzionalità del dispositivo EMG e del software informatico associato al paziente.
- Posizionare il paziente davanti allo schermo del computer.
- Chiedere al paziente di pensare ai movimenti della mano e contemporaneamente tentare di contrarre i muscoli destinati a eseguire un'azione specifica (come estendere il polso, fare un pugno, flettere il pollice, ecc.), anche se questo non si tradurrà in un movimento reale della sua funzione mano. Palpate il suo avambraccio per (debole) contrazione muscolare.
- Posizionare un elettrodo sEMG sulla posizione esatta della pelle, dove la contrazione muscolare può essere palpata con il dito, ad esempio, sul vano dell'estensore dorsale 5 cm distale all'articolazione del gomito quando si chiede al paziente di pensare di estendere il polso e le dita.
NOTA: Mentre l'attività sEMG può essere rilevata con elettrodi bagnati e asciutti, gli elettrodi secchi sono preparati per il test in quanto questi possono essere facilmente spostati sulla pelle per verificare le posizioni ottimali. - Ripetere il comando motore utilizzato in precedenza (cioè l'estensione del polso e delle dita) per suscitare la contrazione del muscolo.
- Osservare il segnale EMG sullo schermo del computer e vedere se l'ampiezza aumenta costantemente quando il paziente tenta di contrarre il muscolo destinato a eseguire un'azione specifica (cioè, estendendo il polso e le dita).
- Se l'ampiezza non è sufficientemente alta (meno di 2 volte 3 volte del rumore di fondo12) o il segnale è incoerente, provare altri comandi motori con la stessa posizione dell'elettrodo e vedere se è possibile ottenere ampiezza più elevate.
- Ripetere la procedura per un altro muscolo o gruppo muscolare. Ad esempio, spostare l'elettrodo sEMG sull'aspetto volar dell'avambraccio, posizionandolo sul muscolo pronatore teres, e chiedere al paziente di tentare di pronating il suo avambraccio. Osservare il segnale sullo schermo del computer e vedere se l'ampiezza aumenta ripetutamente quando il paziente pensa a questo movimento.
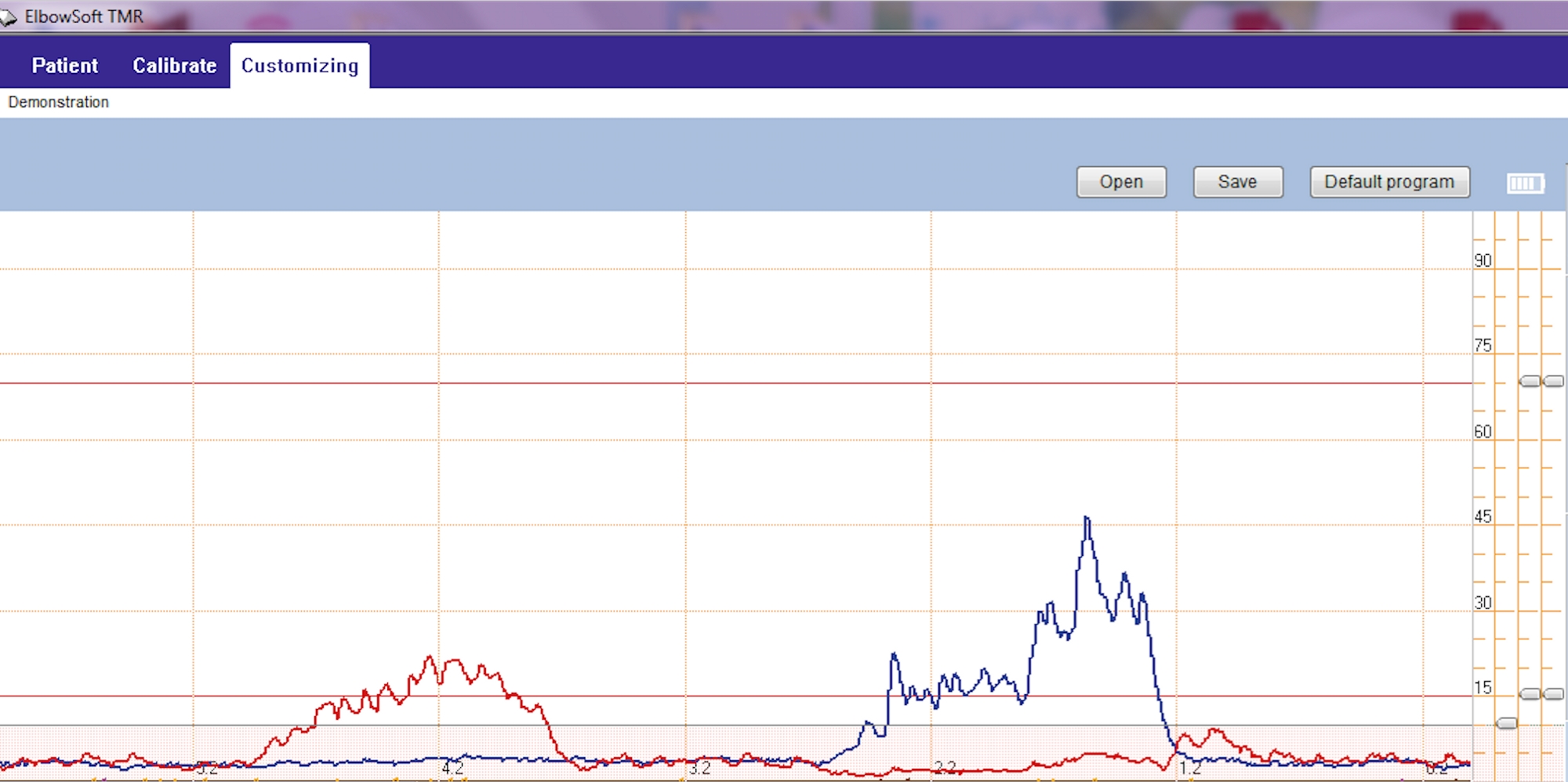
NOTA: In alcuni pazienti, nessuna attività muscolare è palpabile. Qui, tre o più elettrodi sEMG dovrebbero essere posizionati sull'aspetto volano, dorsale e radiale dell'avambraccio e devono essere tentati vari comandi motori, osservando attentamente tutti i segnali per i cambiamenti di ampiezza anche con i minimi cambiamenti nel posizionamento degli elettrodi ( vedere la Figura 1).

Figura 1: Screenshot dei segnali EMG sullo schermo di un computer.
Per identificare l'attività EMG, due o più elettrodi possono essere posizionati sull'avambraccio di un paziente chiedendogli di tentare vari movimenti. In questo caso specifico, l'elettrodo sull'aspetto volar dell'avambraccio rileva l'attività EMG come riflesso dalla prima onda rossa visualizzata sullo schermo del computer, quando il paziente tenta di chiudere la mano. Separazione del segnale in questo paziente è soddisfacente, poiché il segnale blu, che corrisponde al secondo elettrodo posto sull'aspetto dorsale dell'avambraccio, non raggiunge la soglia. Quando il paziente pensa di aprire la mano, l'ampiezza del segnale blu supera la soglia, mentre il segnale rosso rimane quasi inattivo. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}
- Prova anche i comandi motori e le posizioni degli elettrodi che differiscono dall'anatomia "normale" come ri-innervazione aberrante e ricostruzioni extra-anatomiche come nei trasferimenti nervosi hanno alterato l'input neurale ai muscoli parzialmente denervati.
- Se non si trova alcuna attività muscolare nell'avambraccio, ripetere la procedura sulla parte superiore del braccio e della cintura della spalla.
NOTA: In alcuni pazienti non vengono trovati segnali sEMG. In questi, i trasferimenti nervosi e muscolari devono essere eseguiti per stabilire nuovi siti di segnale EMG (il concetto chirurgico dettagliato può essere trovato altrove7), ritardando l'allenamento del segnale per 6-9 mesi. Per il controllo della mano protesico abile sono necessari almeno due segnali EMG separabili.
3. Formazione del segnale guidata da sEMG
NOTA: Le sessioni di allenamento per l'allenamento del segnale guidato da sEMG non devono superare i 30 min in quanto ciò comporta l'affaticamento muscolare, che ostacola il successo dell'apprendimento motorio. I passi descritti devono essere ripetuti per un lungo periodo di tempo per garantire una buona coordinazione neuromuscolare come necessario in seguito per un controllo protesico affidabile.
- Non appena sono stati identificati due o più segnali EMG, incoraggiare il paziente ad attivarli alternativamente (vedere Figura 2A). Per guidare in modo affidabile una protesi, i segnali EMG indipendenti devono essere controllati senza interferenze.
- Regolare il guadagno di tensione di ogni segnale in modo indipendente per ottenere una soglia di ampiezza simile per tutti i segnali durante l'allenamento, il che renderà più facile la separazione e la comprensione del segnale per il paziente.
- Ripetere e spiegare al paziente la meccanica di una mano protesica: una leggera contrazione muscolare porterà in ultima analisi a una migliore separazione del segnale e deve essere preferita sulla forza muscolare, cioè l'ampiezza di un segnale.

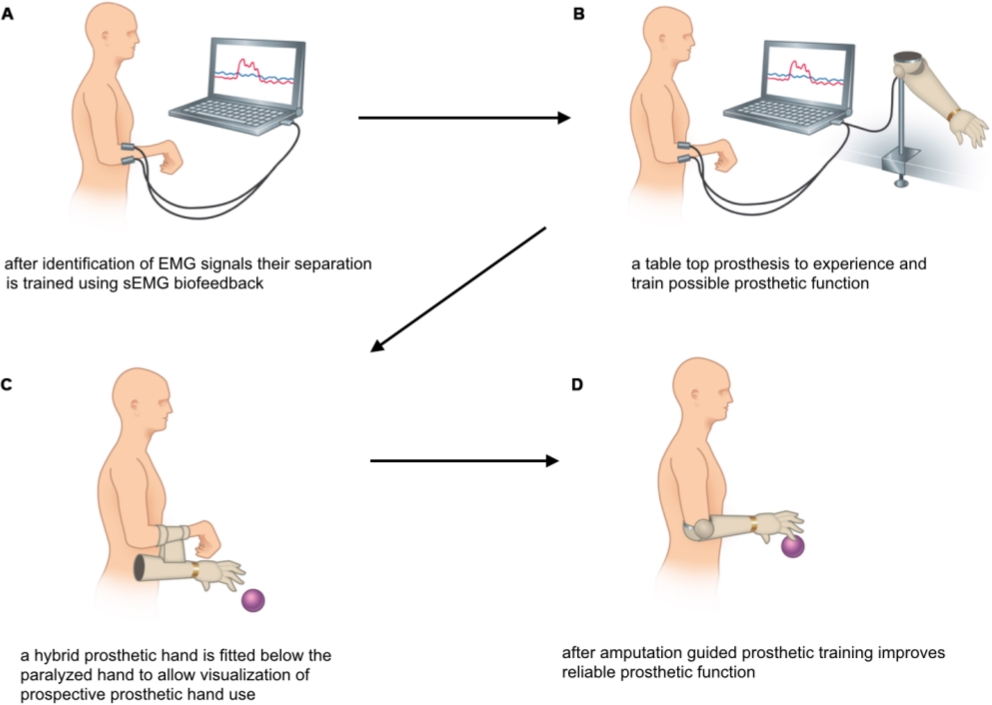
Figura 2: riabilitazione guidata da sEMG per pazienti con ricostruzione bionica delle mani.
(A) Con la visualizzazione diretta dell'attività muscolare, si possono cercare vari comandi motori per identificare la più alta ampiezza EMG su un muscolo bersaglio specifico e diverse posizioni del segnale possono essere confrontate. (B) Utilizzando una protesi da tavolo, l'attività EMG nel braccio di un paziente viene tradotta direttamente in funzione protesica. (C) Il montaggio di una mano protesica ibrida consente al paziente di visualizzare e comprendere l'uso futuro della mano protesica. (D) Dopo la ricostruzione protesica, i segnali EMG possono essere addestrati e ottimizzati sia con il biofeedback sEMG che con la mano protesica stessa. Questa cifra è stata modificata da Sturma et al.12 e riprodotta con il permesso di Frontiers in Neuroscience. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}
- Osservare i segnali EMG sullo schermo del computer e rendere il paziente consapevole se i due segnali sono co-attivati quando si tenta un movimento specifico. Spiegare al paziente che due segnali non devono essere co-attivati durante il tentativo di un'azione specifica, in quanto ogni segnale EMG è collegato a una specifica azione protesica. I segnali coattivati non comporteranno pertanto l'azione desiderata dal paziente.
- Istruire il paziente a provare diversi (leggeri) movimenti e osservare quali modelli di movimento precisi sono i migliori per quanto riguarda la separazione del segnale. Incoraggiare il paziente ad allenare questi movimenti.
- Fai sapere al paziente che la perfetta separazione del segnale è improbabile all'inizio dell'allenamento, ma migliorerà con un elevato numero di ripetizioni.
AGGIORNAMENTO: Lasciare fasi di rilassamento come forza muscolare può diminuire più velocemente in pazienti con lesioni nervose complesse e deboli mioattività. - Con una migliore consistenza del segnale, istruisci il paziente a generare un'ampiezza del segnale più elevata per rafforzare ulteriormente il muscolo e il suo segnale.
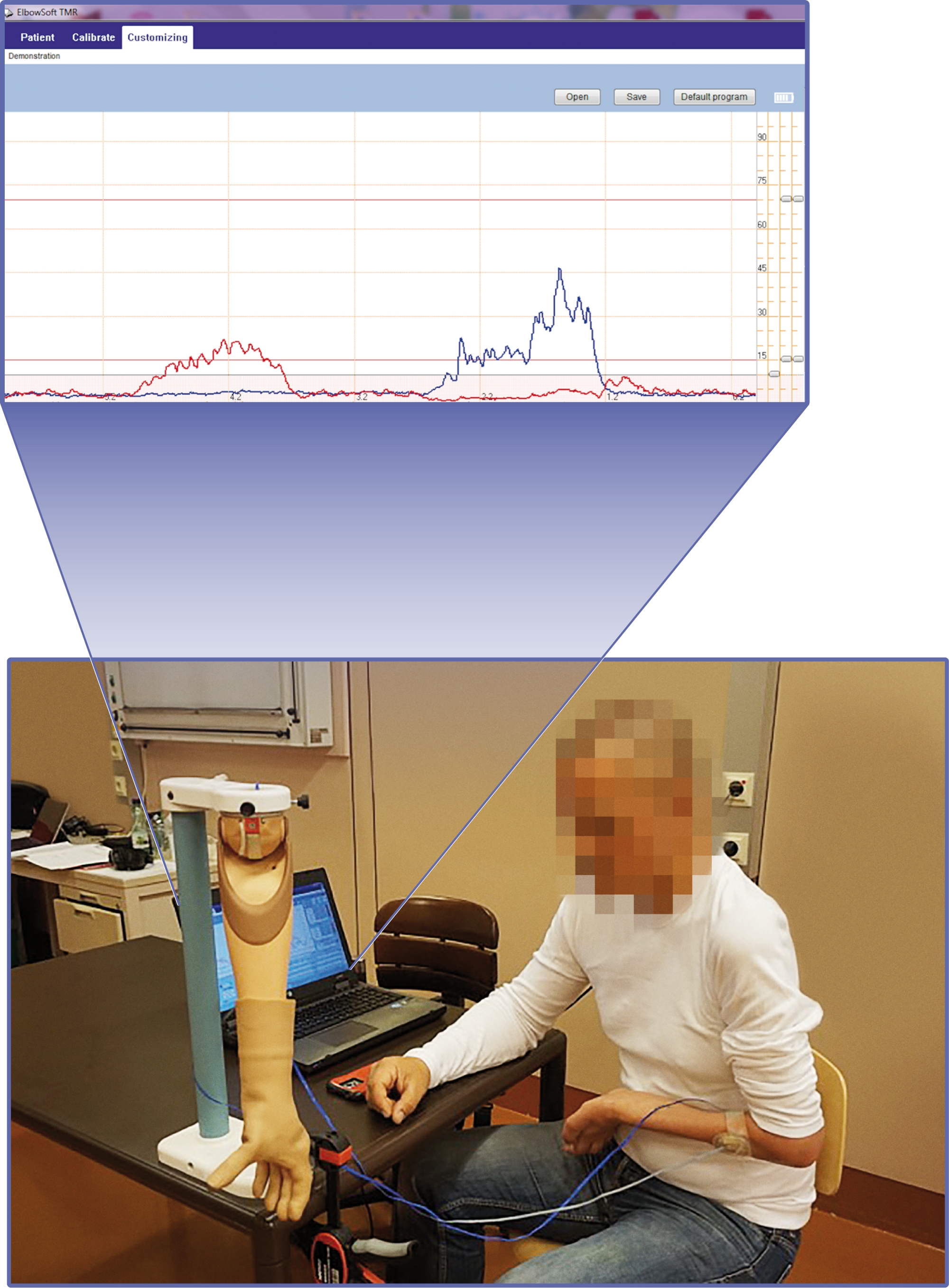
- Con la costante separazione del segnale EMG e il controllo solido, installare una protesi da tavolo collegata al software EMG corrispondente e gli elettrodi posizionati sull'avambraccio/braccio del paziente. Questo tradurrà direttamente l'attività EMG in funzione protesica meccanica (vedere Figura 2B e Figura 3).

Figura 3: Paziente di fronte a una protesi da tavolo e screenshot dei suoi due segnali sullo schermo di un computer.
Sull'avambraccio del paziente, due elettrodi rilevano l'attività EMG. Questi due segnali vengono visualizzati come grafici codificati a colori sullo schermo del computer (rosso e blu) e vengono contemporaneamente tradotti in movimento protesico, consentendo al paziente di comprendere la relazione tra qualità del segnale e controllo protesico. Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}
- Educare il paziente che le protesi mioelettriche con controllo diretto utilizzano l'input di un elettrodo (cioè l'attività muscolare rilevata da un elettrodo) per controllare un movimento protesico.
- Rendere il paziente consapevole della correlazione tra l'aspetto del segnale (per lo più altezza di ampiezza) sullo schermo del computer e la velocità/ forza del movimento protesico, nel caso in cui venga scelto un dispositivo con controllo proporzionale della velocità di movimento.
NOTA: A seconda del numero di segnali EMG disponibili e dei gradi di libertà del dispositivo protesico finale, potrebbe essere necessario utilizzare metodi per passare da un grado di libertà all'altro. Un metodo di commutazione frequentemente utilizzato per passare tra i gradi di libertà (ad esempio, la mano aperta/vicina alla pronazione/supinazione) è attraverso la contrazione simultanea di due muscoli, nota anche come co-contrazione14. - Co-contrazione del treno. Lasciare che il paziente osservi i segnali EMG sullo schermo del computer e la protesi. Se il dispositivo protesico non si muove, cioè aperto/vicino durante la co-contrazione, il paziente lo sta facendo correttamente.
4. Montaggio ibrido a mano e formazione protesica
- Contrassegnare le posizioni degli elettrodi sulla pelle del paziente, che sono state definite come ottimali per un controllo protesico affidabile e lasciare che un tecnico ortopedico produca una presa protesica preliminare progettata con queste posizioni esatte dell'elettrodo.
- Montare una mano protesica ibrida con la presa su misura su misura su o sotto la lancetta "plexus" senza funzione (vedere Figura 2C).
- Eseguire contemporaneamente il programma software EMG per rendere il paziente consapevole delle sue azioni.
- In alternativa allenare diversi movimenti protesici. Gli elettrodi possono anche essere posizionati sui muscoli adiacenti lungo il braccio superiore e la cintura della spalla per evitare cocontrazioni inconsce, che porteranno a affaticamento in tutto l'arto superiore con tempi di usura aumentati.
- Inizia con semplici movimenti protesici (solo aprire / chiudere la mano senza alcuna co-contrazione) con il peso del dispositivo protesico supportato.
- Passare a semplici movimenti protesici in diverse posizioni del braccio, come il gomito esteso o fletteto alternativamente. Rendere il paziente consapevole delle discrepanze del segnale durante la regolazione delle varie posizioni del braccio e la coerenza del segnale in tutte le posizioni.
NOTA: Dopo la rigenerazione spontanea del nervo la co-attivazione involontaria di diversi gruppi muscolari o muscolari si verifica spesso a causa della riinnervazione aberranti, che può ostacolare movimenti coordinati e disabilitare adeguate attività muscolari15. Una debole contrazione muscolare involontaria si verifica spesso quando si muove il braccio, che viene percepito dai sensori sEMG e tradotto in movimento protesico. Ciò può comportare un scarso controllo protesico, se non adeguatamente affrontato durante la riabilitazione utilizzando l'allenamento EMG e il rafforzamento muscolare come descritto di seguito. - In caso di ingombrante controllo protesico in diverse posizioni del braccio, osservare accuratamente i segnali EMG sullo schermo del computer e indicare al paziente, in quale posizione del braccio la contrazione non intenzionale di uno o più muscoli porta all'escursione del segnale. Allenare l'attivazione precisa dei segnali EMG in posizioni che il paziente può ancora gestire e cambiare lentamente la posizione del braccio nel tempo.
- Eseguire l'allenamento della forza per i flessori del gomito (e i muscoli della spalla, se applicabile), se la co-attivazione dei muscoli utilizzati per il controllo protesico è osservata durante il sollevamento del braccio. Spiegare al paziente che un muscolo più forte (cioè un muscolo che non funziona con la sua massima forza volontaria durante semplici operazioni di sollevamento) di solito contribuisce anche a una migliore separazione dei segnali. Eseguire anche l'allenamento della forza, se i muscoli degli arti superiori sono troppo deboli per spostare il dispositivo protesico nello spazio tridimensionale e/o stabilizzare la spalla mentre lo fanno.
- Continuare con semplici attività di presa, come la raccolta di piccole caselle e la manipolazione di piccoli oggetti (vedere Figura 2C).
- Infine, addestra reperire semplici compiti di vita quotidiana come aprire una porta, piegare un asciugamano o aprire una bottiglia.
NOTA: Molti compiti potrebbero essere limitati a causa del fatto che la mano paralizzata si mette in mezzo, e il dispositivo potrebbe sentirsi piuttosto pesante come il paziente deve sollevare il peso della propria mano oltre alla mano protesica ibrida.
- Se la qualità del segnale è insufficiente, potrebbe essere utile tornare per segnalare l'allenamento sullo schermo del computer. In tutte le attività cercare specificamente la co-attivazione dei segnali sullo schermo del computer e migliorare ulteriormente l'indipendenza dal segnale.
- Valutare la funzione dell'arto superiore utilizzando la mano protesica ibrida e registrare il video dei risultati del test. Inoltre, utilizzare le stesse valutazioni per la mano paralizzata al fine di documentare il beneficio funzionale previsto dalla sostituzione protesica della mano senza funzione.
5. Amputazione elettiva e sostituzione della mano protesica
- Pianificare con precisione il livello di amputazione a seconda del sito dei vari segnali EMG (transradiali, transhumerali o, in rari casi, glenohumeral) nel team multidisciplinare costituito dal terapeuta del paziente/eMG trainer, il chirurgo responsabile per l'amputazione e lo psicologo che conosce le aspettative del paziente.
- Chiedere al paziente se ha domande irrisolte riguardanti l'amputazione pianificata e comunicare chiaramente che è possibile in qualsiasi momento prima dell'amputazione revocare questa decisione, il che altrimenti si tradurrà in un intervento chirurgico irreversibile e che altera la vita.
- Eseguire la valutazione standardizzata della funzione dell'arto superiore utilizzando la mano senza funzione e il videotape dei risultati
- Eseguire la valutazione standardizzata della funzione dell'arto superiore utilizzando la mano protesica ibrida e il video-nastro i risultati per documentare i vantaggi di un raccordo protesico futuro.
- Eseguire l'amputazione elettiva dell'arto senza funzione come descritto in precedenza7,8.
- Consentire la guarigione post-operatoria della ferita e lasciare che il paziente addestra resiche adiacenti per una migliore mobilità degli arti superiori. Dopo 4-6 settimane, allena i segnali EMG come descritto sopra e definisci i migliori punti caldi per le posizioni degli elettrodi.
NOTA: Queste posizioni degli elettrodi e i comandi motori potrebbero differire leggermente da quelli rilevati prima dell'amputazione. - Consentire a un tecnico ortopedico di progettare la presa protesica finale utilizzando le posizioni degli elettrodi EMG definite in precedenza (vedere Figura 4, illustrando una possibile progettazione della presa in uno dei pazienti inclusi).
NOTA: Anche se non è raccomandato alcun disegno specifico della presa, la posizione esatta degli elettrodi e la loro adesione alla pelle del ceppo sono della massima importanza in quanto i pazienti con plexus brachiale hanno un'interfaccia neuromuscolare in gran parte ridotta.

Figura 4: Esempio di una possibile protesi e progettazione della presa.
(A) La protesi di questo paziente è costituita da una fala esterna in carbonio. (B) Invece di una mano protesica, il paziente preferisce utilizzare un gancio, che si apre e si chiude, come strumento di presa. (C,D) I due elettrodi sono integrati nella protesi. Il paziente indossa un rivestimento in silicone con due fori in esso, permettendo il contatto diretto della pelle con i due elettrodi (non mostrato). Fare clic qui per visualizzare una versione più grande di questa figura.
{kind=link}
- Inizia l'allenamento protesico.
- Anche in questo caso, iniziare con semplici movimenti protesici (solo aprire / chiudere la mano senza alcuna co-contrazione) con il peso del dispositivo protesico supportato.
- Passare a semplici movimenti protesici in diverse posizioni del braccio, come il gomito esteso o fletteto alternativamente.
- Continuare con semplici attività di presa come la raccolta di piccole caselle e la manipolazione di piccoli oggetti (vedere Figura 2D).
- Infine, addestrare le attività della vita quotidiana, ricominciando con compiti piuttosto semplici (come aprire una porta) e lentamente aggiungere complessità e compiti che il paziente considera rilevanti per la sua situazione di vita specifica.
- Tre mesi dopo il montaggio protesico, ripetere la valutazione standardizzata della funzione dell'arto superiore utilizzando la mano protesica e registrare un video dei risultati.
Risultati
In sei pazienti con gravi lesioni del plesso brachiale, tra cui avulsioni multiple della radice nervosa, è stato implementato con successo il protocollo di riabilitazione presentato utilizzando il biofeedback sEMG. Le caratteristiche dettagliate del paziente sono riportate nella tabella 1. La figura 2 illustra le varie fasi del protocollo di riabilitazione strutturata e le spiegazioni dettagliate sulla sua attuazione.
Per dimostrare i miglioramenti nella funzione della mano prima e dopo la ricostruzione bionica, una valutazione standardizzata della valutazione della funzione dell'estremità superiore globale è stata eseguita in due punti temporali: prima dell'amputazione elettiva della mano "plexus" senza funzione e dopo il successo della ricostruzione protesica e della riabilitazione. Il Action Research Arm test (ARAT) è stato originariamente sviluppato per valutare la funzione motoria dell'estremità superiore globale in pazienti con compromissione cognitiva del controllo della mano16. L'approccio standardizzato di Yozbatiran et al.17 è stato utilizzato nei nostri studi. L'ARAT è costituito da quattro diverse sezioni, che includono compiti vicini alla vita quotidiana. Il test è temporizzato dall'osservatore che valuta anche le prestazioni dell'attività da 0 e 3, con 3 che indicano la normale funzione. È raggiungibile un massimo di 57 punti, indicando la funzione motoria non alterata16. Il numero di sedute terapeutiche con biofeedback sEMG e risultati dettagliati per ogni paziente sono disponibili nella tabella 2.
Sebbene la soddisfazione del paziente con il protocollo di riabilitazione offerto utilizzando il biofeedback sEMG non sia stata misurata direttamente, tutti e sei i pazienti hanno riferito di trovarlo estremamente utile per comprendere il processo di riinnervazione dopo l'intervento chirurgico di trasferimento dei nervi e per allenare la contrazione dei muscoli con attività molto debole che in precedenza non era di alcun uso clinico per loro.
| Numero del caso | Sesso, età (anni) | Tipo di incidente | Tipo di lesione | Gli interventi chirurgici per migliorare l'interfaccia biotecnologica dopo che le ricostruzioni iniziali non sono riuscite a migliorare la funzione della mano | |
| 1 | m, 32 | Caduta dall'altezza | Avulsione di C7-T1; lesione alla trazione del plesso infraclavicolare | Amputazione elettiva dell'avambraccio | |
| 2 | m, 32 | Incidente motociclistico | Rottura di tutti e 3 i trunci del BP | Muscolo gracilis libero trasferito al compartimento estensore dell'avambraccio & neurotizzazione del ramo profondo del nervo radiale al nervo otturatore; amputazione elettiva dell'avambraccio | |
| 3 | m, 55 | Incidente motociclistico | Avulsione di C5-T1 | Amputazione elettiva del braccio superiore | |
| 4 | m, 38 | Incidente motociclistico | Danni ingenti alle radici C5-C8; avulsione di T1 | Amputazione elettiva dell'avambraccio | |
| 5 | m, 27 | Incidente motociclistico | Avulsione C8-T1 | Amputazione elettiva dell'avambraccio | |
| 6 | m, 43 | Incidente motociclistico | Avulsione di C6-T1 | Trasferimento del muscolo tricipite alla fossa a infrarossi e trasferimento del muscolo bicipite in fossa supraclavicolare per migliorare il montaggio protesico; Amputazione elettiva del braccio (esaculazione della spalla) | |
Tabella 1: Caratteristiche del paziente. In tutti i pazienti, la ricostruzione bionica è stata avviata a causa dell'infeabilità delle alternative di trattamento biologico. Gli interventi chirurgici per stabilire i segnali EMG nel braccio inferiore e superiore possono includere trasferimenti nervosi e muscolari selettivi, che poi guideranno una mano protesica mioelettrica. L'amputazione elettiva viene eseguita a livello transradiale o transhumerale, a seconda dell'attività muscolare residua. Tutti i trasferimenti nervosi selettivi effettuati in questo gruppo di pazienti hanno avuto successo. Questa tabella è stata modificata da Sturma et al.12 e riprodotta con il permesso di Frontiers in Neuroscience.
| Numero del caso | ARAT al basale | ARAT al follow-up | Inizio della formazione sEMG | Numero di sedute terapeutiche in totale (30 min ciascuna) | |
| 1 | 7 | 35 | Subito dopo la prima consultazione | 24 | |
| 2 | 0 | 15 | Allenamento con un segnale subito dopo la prima consultazione; secondo segnale è stato disponibile 9 mesi dopo il trasferimento gratuito gracillis | 30 | |
| 3 | 0 | 19 | Subito dopo la prima consultazione | 16 | |
| 4 | 1 | 22 | Subito dopo la prima consultazione | 20 | |
| 5 | 9 | 42 | Subito dopo la decisione di puntare a una ricostruzione bionica come ricostruzione biologica fallita | 20 | |
| 6 | 0 | 17 | Subito dopo la prima consultazione | 22 | |
| Media (- SD) | 2,83 x 4,07 | 25,00 x 10,94 | 22 x 4,32 | ||
Tabella 2: punteggi ARAT e numero di sessioni di terapia. Nell'Action Research Arm test (ARAT), i pazienti inizialmente mostravano una funzione trascurabile dell'arto superiore (media 2,83, di un massimo di 57 punti raggiungibili). La funzione utile è stata ripristinata dopo la ricostruzione bionica (media 25.00, di 57). Questa tabella è stata modificata da Sturma et al.12 e riprodotta con il permesso di Frontiers in Neuroscience.
Discussione
Approcci di biofeedback sono stati ampiamente utilizzati nella riabilitazione di diversi disturbi neuromuscolari, che vanno da (emi)-condizioni plegiche derivanti da patologie centrali come emorragia cerebrale e ictus18,19 a varie degenerazioni o lesioni muscolo-scheletriche e la loro terapia chirurgica20,21,22. È interessante notare che il concetto di biofeedback strutturato non è stato implementato nella pratica clinica per le lesioni nervose periferiche. Tuttavia, proprio nella riabilitazione di lesioni nervose complesse, pratica, ripetizione e programmi di allenamento strutturati con biofeedback appropriato sono necessari per stabilire modelli motori corretti23.
Qui, e in uno studio precedente12, abbiamo presentato un protocollo di riabilitazione strutturata utilizzando biofeedback sEMG per i pazienti con mancanza di alternative di trattamento biologico ammissibili per la sostituzione protesica della mano, un concetto oggi noto come bionico ricostruzione f. Il vantaggio più evidente dell'utilizzo di un set-up di biofeedback sEMG nel contesto della ricostruzione bionica deriva dall'esatta definizione di hotspot sEMG, vale a dire le posizioni della pelle, dove un'ampiezza relativamente elevata dell'attività EMG può essere misurata transcutaneamente. Vari comandi motori possono essere tentati alternativamente, in quanto i sensori possono essere facilmente spostati lungo l'intero avambraccio e - in caso di mancanza funzione muscolare rilevabile nell'avambraccio - anche nella parte superiore del braccio e della cintura della spalla. Quando a un paziente viene chiesto di tentare di contrarre i muscoli destinati a eseguire un'azione specifica (ad esempio l'estensione del polso), è possibile posizionare un elettrodo, dove la contrazione muscolare (debole) viene palpata dall'esaminatore. Osservando il segnale EMG sullo schermo del computer, si può facilmente determinare se l'ampiezza del segnale aumenta costantemente, quando il paziente tenta di contrarre questo muscolo. Se l'ampiezza non è abbastanza alta o il segnale è incoerente, possono essere tentati altri comandi motori con la stessa posizione dell'elettrodo. Come opporsi all'ago EMG, questa procedura non è invasiva, non è dolorosa e può essere ripetuta per tutti i muscoli / gruppi muscolari nel braccio. Testare vari comandi motori in diverse posizioni muscolari permette di identificare gli hotspot EMG, con la massima ampiezza e attività riproducibile associata a una specifica azione motoria. Dopo l'identificazione dei segnali EMG più forti, questi possono essere addestrati utilizzando il biofeedback sEMG per quanto riguarda la separazione del segnale (la co-attivazione di due o più segnali EMG non deve avvenire sullo schermo del computer), la potenza del segnale (riflessa dal segnale EMG ampiezza sullo schermo del computer) e riproducibilità del segnale (ogni tentativo di contrarre il muscolo deve portare a un'escursione del rispettivo segnale EMG). In una fase successiva dell'allenamento, l'attività EMG si traduce direttamente in funzione protesica, prima utilizzando una protesi da tavolo (vedere la Figura 3),che fornisce un feedback aggiuntivo al paziente che consente la messa a punto della forza della presa, e quindi protesi fisica.
Negli amputati convenzionali, una grande quantità di letteratura ha dimostrato che il reinnervvazione mirata-muscolo (TMR), vale a dire, il trasferimento chirurgico dei nervi residui del braccio a siti muscolari alternativi nel torace e nella parte superiore del braccio, migliora la funzione protesica, dal momento che questi riinnervati i muscoli fungono da amplificatori biologici di comandi motori intuitivi e forniscono segnali EMG fisiologicamente appropriati per il controllo protesico di24mani,polso e gomito 24 ,25,26,27 . Utilizzando sistemi di controllo di riconoscimento dei pattern, i dati EMG estratti da numerosi segnali sEMG posizionati sulla pelle di questi muscoli ri-innervati possono essere decodificati e tradotti in uscite motorie specifiche e riproducibili, che forniscono un mioelettrico più affidabile controllo protesia28,29,30. Poiché il numero di siti di segnale EMG e l'attività mioelettrica dei muscoli nei pazienti con lesioni da avulsione del plesso brachiale sono molto limitati, gli algoritmi di riconoscimento dei modelli non possono essere utilizzati come avviene per gli amputati convenzionali8. Ancora, con ulteriori ricerche e una migliore tecnologia, questi sistemi possono essere in grado di estrarre ulteriori informazioni sui segnali muscolari deboli esistenti e quindi migliorare la funzione protesica anche in questo particolare gruppo di pazienti.
Mentre il protocollo presentato è considerato una linea guida, i dettagli devono essere adattati a seconda del paziente e delle attrezzature disponibili. A causa della riinnervazione aberrante che si verifica dopo tali lesioni nervose, i comandi motori non comportano necessariamente l'attivazione di muscoli anatomicamente "corretti"12. Ad esempio, gli autori hanno osservato l'attività EMG nel compartimento flessore dell'avambraccio, mentre i pazienti tentavano di aprire la mano. Pertanto, vari comandi motori devono essere testati al fine di identificare i segnali EMG. Inoltre, la funzione muscolare residua (anche se in tutti i casi troppo debole per generare movimenti utili della mano) potrebbe variare in gran parte tra i pazienti e causare variazioni nel tempo di allenamento richiesto, come mostrato nella tabella 2. Inoltre, la scelta del dispositivo protesico e il numero di elettrodi utilizzati per il controllo modificano i requisiti per la precisione della separazione del segnale, l'ampiezza del segnale e la necessità di co-contrazione. Tutto questo deve essere preso in considerazione durante l'allenamento del segnale, l'allenamento della protesi ibrida e l'allenamento protesico effettivo, come è raccomandato anche nella formazione protesica standard degli amputati31. Per quanto riguarda i dispositivi utilizzati per la formazione biofeedback sEMG, gli autori considerano i dispositivi adatti se possono visualizzare contemporaneamente il numero di segnali necessari per il controllo protesico, fornire feedback in tempo reale e possono essere collegati a un computer o a un display i segnali su uno schermo stessi. Sono preferiti i dispositivi che consentono di regolare l'aumento del segnale durante l'allenamento.
Dopo la riabilitazione, tutti i pazienti sono stati in grado di utilizzare la loro protesi durante le attività della vita quotidiana e sono stati soddisfatti della decisione di avere la loro mano senza funzione sostituita con un dispositivo protesico12. Questo miglioramento funzionale è stato riflesso da significativi aumenti dei punteggi ARAT medi da 2,83 x 4,07 a 25,00 x 10,94 (p - 0,028).
Dal nostro punto di vista, i set-up di biofeedback sEMG presentano strumenti preziosi per facilitare il processo cognitivamente impegnativo di recupero motorio associato a lesioni nervose e ricostruzione bionica. L'identificazione del posizionamento ottimale degli elettrodi EMG e il test di vari comandi motori con visualizzazione diretta dell'attività muscolare sono notevolmente semplificate utilizzando il biofeedback sEMG in un set-up clinico. Anche se il biofeedback sEMG può essere utilizzato anche nella riabilitazione della funzione biologica dell'arto superiore10,12, la sua applicazione nel processo di ricostruzione bionica è considerata particolarmente efficace. Ancora più importante, i segnali sEMG attivati durante l'allenamento riflettono successivamente le posizioni degli elettrodi all'interno della presa protesica, che è personalizzata individualmente per ogni paziente. Pertanto, l'attivazione ripetitiva di questi segnali durante l'allenamento molto probabilmente aumenta la gestione protesica futura e la capacità manuale. La visualizzazione diretta di questa attività muscolare permette anche al paziente di comprendere il concetto di controllo della mano mioelettrico e lui / lei può seguire i progressi di formazione più consapevolmente.
In futuro, il nostro protocollo di riabilitazione presentato potrebbe essere esteso con strumenti più avanzati per migliorare i risultati funzionali. Questo potrebbe includere registrazioni sEMG ad alta densità per facilitare il processo di posizionamento degli elettrodi tramite mappe di calore di attivazione32, ulteriori soluzioni virtuali per valutare l'attività EMG30,33,e giochi seri per migliorare la formazione motivazione34. Inoltre, nuove tecnologie per il controllo protesico, ad esempio gli algoritmi di riconoscimento dei modelli, potrebbero essere utilizzate anche28,30,35. Tuttavia, a causa della ridotta interfaccia neuromuscolare, non è chiaro se sistemi attualmente disponibili in commercio progettati per amputati altrimenti sani migliorerebbero significativamente la funzione protesica in questo specifico gruppo di pazienti. Studi futuri dovrebbero valutare l'applicabilità e i benefici delle nuove tecnologie elencate per la riabilitazione di pazienti con gravi lesioni del plesso brachiale. Inoltre, gli studi controllati con un numero di pazienti più elevato permetteranno anche di dimostrare gli effetti positivi dell'attuale protocollo utilizzando il biofeedback sEMG con un più alto livello di evidenza.
Divulgazioni
Gli autori non hanno nulla da rivelare.
Riconoscimenti
Questo studio è stato finanziato dalla Fondazione di ricerca cristiana Doppler del Consiglio austriaco per la ricerca e lo sviluppo tecnologico e dal Ministero federale austriaco della scienza, della ricerca e dell'economia. Siamo grati ad Aron Cserveny per la preparazione delle illustrazioni incluse nel manoscritto e a Frontiers in Neuroscience per il permesso di riprodurre i dati presentati nell'articolo originale12.
Materiali
| Name | Company | Catalog Number | Comments |
| dry EMG electrodes | Ottobock Healthcare, Duderstadt, Germany | 13E202 = 50 | The EMG electrodes used in this study were bipolar and included a ground. They can be used both for EMG training with the Myoboy and for the control of a prosthetic device. |
| Myoboy | Otto bock Healthcare, Duderstadt, Germany | Myoboy | This device that can be used as stand alone device or with a computer. It allows to display EMG activity while using the dry EMG electrodes that can also be impeded in the prosthetic socket. |
| SensorHand Speed | Ottobock Healthcare, Duderstadt, Germany | All patients used this commercially available myoelectrical prosthesis as their standard prosthetic device and during functional testing. Fitting of patients undergoing this procedure is, however, not restricted to this device. | |
| Standard laptop with Microsoft operating system | Usually, devices for EMG biofeedback connected to a computer do not require much computing power and thus work on any regular laptop | ||
| TeleMyo 2400T G2 | Noraxon, US | A surface EMG biofeedback set-up used in our protocol, connected to TeleMyo-Software, which displays the recorded EMG activity as color-coded graphs on the computer screen | |
| wet EMG electrodes | Ambu | Ambu Blue Sensor VL Adhesive Electrodes | These adhesive electrodes can be used in combination with many different EMG biofeedback devices, including the TeleMyo 2400T. While they cannot be moved easily, the wet contacts usually allow to detect very faint EMG signals as well. |
Riferimenti
- Bertelli, J. A., Ghizoni, M. F. Results and current approach for Brachial Plexus reconstruction. Journal of Brachial Plexus and Peripheral Nerve Injury. 6 (1), 2 (2011).
- Birch, R. Traction lesions of the brachial plexus. British Journal of Hospital Medicine. 32 (3), 140-143 (1984).
- Narakas, A. O. The treatment of brachial plexus injuries. International Orthopaedics. 9 (1), 29-36 (1985).
- Terzis, J. K., Barbitsioti, A. Primary restoration of elbow flexion in adult post-traumatic plexopathy patients. Journal of Plastic, Reconstructive & Aesthetic Surgery. 65 (1), 72-84 (2012).
- Tung, T. H., Mackinnon, S. E. Nerve Transfers: Indications, Techniques, and Outcomes. The Journal of Hand Surgery. 35 (2), 332-341 (2010).
- Terzis, J. K., Vekris, M. D., Soucacos, P. N. Brachial plexus root avulsions. World Journal of Surgery. 25 (8), 1049-1061 (2001).
- Aszmann, O. C., et al. Bionic reconstruction to restore hand function after brachial plexus injury: a case series of three patients. Lancet. 385 (9983), 2183-2219 (2015).
- Hruby, L. A., et al. Algorithm for bionic hand reconstruction in patients with global brachial plexopathies. Journal of Neurosurgery. 127 (5), 1163-1171 (2017).
- Bergmeister, K. D., et al. Broadband Prosthetic Interfaces: Combining Nerve Transfers and Implantable Multichannel EMG Technology to Decode Spinal Motor Neuron Activity. Frontiers in Neuroscience. 11, 421 (2017).
- Kim, J. H. The effects of training using EMG biofeedback on stroke patients upper extremity functions. Journal of Physical Therapy Science. 29 (6), 1085-1088 (2017).
- Merletti, R. P. P. . Electromyography: Physiology, Engineering, and Non-Invasive Applications. , (2004).
- Sturma, A., Hruby, L. A., Prahm, C., Mayer, J. A., Aszmann, O. C. Rehabilitation of Upper Extremity Nerve Injuries Using Surface EMG Biofeedback: Protocols for Clinical Application. Frontiers in Neuroscience. 12, 906 (2018).
- Hruby, L. A., Pittermann, A., Sturma, A., Aszmann, O. C. The Vienna psychosocial assessment procedure for bionic reconstruction in patients with global brachial plexus injuries. PLoS ONE. 13 (1), 0189592 (2018).
- Vujaklija, I., Farina, D., Aszmann, O. New developments in prosthetic arm systems. Orthopedic Research and Reviews. 8, 31-39 (2016).
- Shin, Y. B., Shin, M. J., Chang, J. H., Cha, Y. S., Ko, H. Y. Effects of Botulinum Toxin on Reducing the Co-contraction of Antagonists in Birth Brachial Plexus Palsy. Annals of Rehabilitation Medicine. 38 (1), 127-131 (2014).
- Lyle, R. C. A performance test for assessment of upper limb function in physical rehabilitation treatment and research. International Journal of Rehabilitation Research. 4 (4), 483-492 (1981).
- Yozbatiran, N., Der-Yeghiaian, L., Cramer, S. C. A standardized approach to performing the action research arm test. Neurorehabilitation and Neural Repair. 22 (1), 78-90 (2008).
- Giggins, O. M., Persson, U. M., Caulfield, B. Biofeedback in rehabilitation. Journal of NeuroEngineering and Rehabilitation. 10, 60 (2013).
- Rayegani, S. M., et al. Effect of neurofeedback and electromyographic-biofeedback therapy on improving hand function in stroke patients. Topics in Stroke Rehabilitation. 21 (2), 137-151 (2014).
- Pfeufer, D., et al. Training with biofeedback devices improves clinical outcome compared to usual care in patients with unilateral TKA: a systematic review. Knee Surgery, Sports Traumatology, Arthroscopy. 27 (5), 1611-1620 (2018).
- Huang, H., Lin, J. J., Guo, Y. L., Wang, W. T. J., Chen, Y. J. EMG biofeedback effectiveness to alter muscle activity pattern and scapular kinematics in subjects with and without shoulder impingement. Journal of Electromyography and Kinesiology. 23 (1), 267-274 (2013).
- Oravitan, M., Avram, C. The effectiveness of electromyographic biofeedback as part of a meniscal repair rehabilitation programme. Journal of Sports Science and Medicine. 12 (3), 526-532 (2013).
- Novak, C. B., von der Heyde, R. L. Evidence and techniques in rehabilitation following nerve injuries. Hand Clinics. 29 (3), 383-392 (2013).
- Dumanian, G. A., et al. Targeted reinnervation for transhumeral amputees: current surgical technique and update on results. Plastic and Reconstructive Surgery. 124 (3), 863-869 (2009).
- Kuiken, T. A., et al. Targeted muscle reinnervation for real-time myoelectric control of multifunction artificial arms. JAMA. 301 (6), 619-628 (2009).
- Miller, L. A., et al. Control of a six degree of freedom prosthetic arm after targeted muscle reinnervation surgery. Archives of Physical Medicine and Rehabilitation. 89 (11), 2057-2065 (2008).
- Kuiken, T. A., et al. Targeted reinnervation for enhanced prosthetic arm function in a woman with a proximal amputation: a case study. Lancet. 369 (9559), 371-380 (2007).
- Scheme, E., Englehart, K. Electromyogram pattern recognition for control of powered upper-limb prostheses: state of the art and challenges for clinical use. Journal of Rehabilitation Research & Development. 48 (6), 643-659 (2011).
- Simon, A. M., Lock, B., Stubblefield, K. A. Patient training for functional use of pattern recognition-controlled prostheses. Journal of Prosthetics and Orthotics. 24 (2), 56-64 (2012).
- Simon, A. M., Hargrove, L. J., Lock, B. A., Kuiken, T. A. Target Achievement Control Test: evaluating real-time myoelectric pattern-recognition control of multifunctional upper-limb prostheses. Journal of Rehabilitation Research & Development. 48 (6), 619-627 (2011).
- Johnson, S. S., Mansfield, E. Prosthetic training: upper limb. Physical Medicine and Rehabilitation Clinics of North America. 25 (1), 133-151 (2014).
- Kapelner, T., et al. Motor Unit Characteristics after Targeted Muscle Reinnervation. PLoS ONE. 11 (2), 0149772 (2016).
- Sturma, A., et al. A surface EMG test tool to measure proportional prosthetic control. Biomedizinische Technik. Biomedical Engineering. 60 (3), 207-213 (2015).
- Prahm, C., Kayali, F., Sturma, A., Aszmann, O. PlayBionic: Game-Based Interventions to Encourage Patient Engagement and Performance in Prosthetic Motor Rehabilitation. PM&R. 10 (11), 1252-1260 (2018).
- Roche, A. D., et al. A Structured Rehabilitation Protocol for Improved Multifunctional Prosthetic Control: A Case Study. Journal of Visualized Experiments. (105), e52968 (2015).
Ristampe e Autorizzazioni
Richiedi autorizzazione per utilizzare il testo o le figure di questo articolo JoVE
Richiedi AutorizzazioneThis article has been published
Video Coming Soon
Personale delle biblioteche
Copyright © 2025 MyJoVE Corporation. Tutti i diritti riservati