
Method Article
植物与环境相互作用实时生理表型的遥测重力平台
摘要
这种高通量、遥测、全植物水关系重力表型方法可实现直接和同步的实时测量,以及分析动态植物与环境相互作用中涉及的多个产量相关生理特征。
摘要
不断增长的全球人口的粮食安全是一个主要关切问题。基因组工具提供的数据远远超过表型数据的供应量,造成了知识差距。为了迎接改善作物以养活不断增长的全球人口的挑战,必须弥合这一差距。
生理特征被认为是对环境条件反应或敏感性的关键功能特征。许多最近引进的高通量(HTP)表型技术都基于遥感或成像,能够直接测量形态特征,但主要间接测量生理参数。
本文介绍了一种直接生理表型方法,该方法对植物与环境相互作用的功能表型具有若干优点。它帮助用户克服在使用称重传感器重力系统和盆栽实验中遇到的许多挑战。建议的技术将使用户能够区分土壤重量、植物重量和土壤含水量,为连续和同时测量动态土壤、植物和大气条件以及测量关键生理特征提供方法。这种方法允许研究人员密切模拟场应力情景,同时考虑环境对植物生理的影响。此方法还最大限度地减少了锅效应,这是场前表型中的主要问题之一。它包括一个反馈式施肥系统,可在现场样植物密度下实现真正的随机实验设计。该系统可检测土壤-水含量限制阈值 (+),并允许使用实时分析工具和在线统计资源将数据转换为知识。这种方法用于快速和直接测量多种植物对动态环境的生理反应,在田前育种和作物改良的背景下,在筛选与非生物应激反应相关的有益特征方面有很大的潜力。
引言
在日益恶化的环境条件下,确保全球不断增长的人口获得粮食安全,是目前农业研究1、2、3,的主要目标之一。新的分子工具的提供大大增强了作物改良计划。然而,虽然基因组工具提供了大量的数据,但对实际表型特征的有限理解造成了巨大的知识差距。弥合这一差距是现代植物科学4、5、6,面临的最大挑战之一。为了迎接作物改良过程中出现的挑战,尽量减少基因型-表型知识差距,我们必须平衡基因学方法与以现象为中心的方法,7,8。
最近,各种高通量表型(HTP)平台使大量植物群的无损表型成为可能,这些平台可能有助于我们缩小基因型-表型知识差距,6、8、9、10。89,106HTP 筛选技术允许在相对较短的时间内测量大量植物的特征,这要归功于用于移动植物或传感器的机器人和传送带或甘特瑞斯(分别),而不是基于气体交换或摄影的手工操作技术。然而,HTP系统产生的海量数据带来了额外的数据处理和分析挑战11,12。11,
这些HTP平台大部分涉及通过电子传感器或自动图像采集13,14评估表型特征。先进的场现象涉及在该领域的近近传感器和成像技术的部署,以及高分辨率,精确和大规模测量尺度15。传感器和图像数据需要与其他多组数据集成,以创建一个整体的,第二代现象方法16。然而,在数据采集、处理和处理方面的方法论进展正变得越来越重要,因为在植物现象学研究的第一年,将传感器信息转化为知识的挑战被严重低估了。然而,目前可用于动态基因型-环境相互作用和植物应激反应的深入表型成像技术的可靠性和准确性值得怀疑。,18此外,受控制环境的结果往往与在实地观察到的结果大不相同,特别是在干旱压力表型方面。这是因为由于干旱压力期间土壤水分下降,植物在土壤体积、土壤环境和机械阻抗方面的情况不同。因此,来自受控环境的结果很难推断到字段19。最后,基于图像的 HTP 系统的进入价格非常高,不仅由于传感器的价格,还由于机器人、传送带和甘特林,这还需要更高的增长设施基础设施和大量维护标准(许多移动部件在温室环境中工作)。
本文提出了一个旨在解决上述许多问题的HTP遥测表型平台。遥测技术能够自动测量数据,将数据从远程源传输至接收站进行记录和分析。在这里,我们演示一个无损的 HTP 遥测平台,该平台包括多个称重测光仪(重力系统)和环境传感器。该系统可用于收集和即时计算(不需要图像分析)各种数据,如全植物生物量增益、蒸腾速率、口腔电导、根通量和水利用效率(WUE)。对系统中从控制器直接输入到软件的大数据进行实时分析,是将数据转化为知识14 的重要一步,对实际决策具有重大价值,大大扩展了从受控环境表型实验,特别是干旱压力的温室研究中获得的知识。
遥测平台的其他优点是它的可扩展性和易于安装,以及其最小的增长设施基础设施要求(即,它可以轻松地安装在大多数增长设施中)。此外,由于此基于传感器的系统没有移动部件,维护成本相对较低,包括入门价格和长期维护成本。例如,20 单位重力系统的价格,包括每个工厂、气象站和软件的反馈热化系统,的价格将类似于领先品牌的便携式气体交换系统的价格。
水稻(Oryza sativa L.)被用作示范作物,干旱是经检查的治疗。稻米之所以被选中,是一种具有广泛遗传多样性的主要谷物作物,也是全世界20多人口的主要粮食。干旱是一个主要的环境非生物应激因素,可以影响植物的生长发育,导致作物减产21。此作物处理组合用于演示平台的功能以及可生成的数据量和质量。有关此方法的理论背景的信息,请参阅 22。
研究方案
在该协议中,我们提到4L锅加载20厘米x20厘米鳞片,每个锅包含一个植物。相同的协议易于扩展,可用于更大的锅(高达25L加载在40厘米x40厘米的尺度上,只有线性适应协议措施)和几个植物每个锅。因此,该协议可以很容易地适应植物的多种类型和大小。有关系统 组件, 请参阅图 1 和图 2。
1. 为实验准备锅
- 插入土壤过滤器。将尼龙网(网)铺到整个锅的顶部,将网架放在网顶上。用一只手,慢慢地将网架推下整个锅的内侧一半。确保网在两个锅之间向下推时保持均匀分布。
- 将玻璃纤维棒(杆)插入两个锅之间,一直推到整个锅的底部,确保它位于网的外侧,并且不推网。
- 在将网架一直向下推之前,请用手将网从锅内向下推,并进行调整,以便净支架完全插入后,其均匀、紧密地分布在锅底(图 2CI)。
- 从上述锅设置的底部滑动垫片环,三分之一的方式向上的锅边。确保环的缝隙朝锅底部打开(图2CII)。
- 对所有实验锅重复步骤 1.1-1.4,然后再继续执行下一步。使用阵列随机化器应用程序随机化植物的位置(图2D;在随机块设计或完全随机设计中)。
注:要下载免费程序并了解更多信息,请参阅链接:https://drive.google.com/open?id=1y4QbTpxRK5Lx430xzu1RFdrlcL8pz_1q)。 - 根据锅在温室内阵列中的位置标记锅。例如,标签"B10D"对应于第 10 列表 B 上的锅,D 行为每张桌子准备三个额外的锅,用于土壤-含水量测量(请参阅第 7.1 节)。
2. 种植植物
- 选择最适合实验的生长(盆栽)介质。为实验选择正确的媒介至关重要,正确的选择取决于几个因素(参见讨论)。对于首次使用的用户,我们强烈建议使用多孔陶瓷、小型中型产品。有关更多信息 ,请参阅表 1 和表 2, 以帮助为实验选择合适的介质。
- 用所需的盆栽介质将种子在腔盘中发芽。如果可能,在同一温室内进行试验,以使植物适应温室内的环境条件。
- 如果幼苗没有在托盘中发芽,则将它们移植到含有盆栽介质的腔盘中。在每个腔中种植一个幼苗,让它生长,直到其根部足够密密,以形成腔体的形状(根土塞)。
- 离开5~7个无苗,用于土壤重量测量(仅盆栽介质; 图3.有关详细信息,请参阅第 5.9 节。
3. 提高信噪信号电平
注:以下步骤可提高测量质量并降低噪声水平。
- 校准 lysimeter。
- 使用精神水平检查所有 lysimeter 是否为水平,然后开始重量校准过程。使用两个标准重量(1~10 千克)。当绿色容器(包括所有插头)位于称重传感器上时执行校准。
- 在每个称重传感器上设置第一个(较轻的)校准重量。
- 在操作软件中,转到"校准"选项卡并选择第一个点的重量。然后,选择放置权重的称重单元位置,然后单击"获取点1"(附加图 1A)。此步骤可以同时应用于多个加载单元。
- 对第二个重量重复,然后单击"获取点2"。
- 单击 应用校准。
- 确保足够数量的植物与适当的规模为实验
注:植物越小,其信号越弱(例如,一天中水的重量与锅的重量相比)。以下步骤将有助于提高信噪比。- 当植物的容量达到最大盆水容量的 10% 时,开始实验。
注:例如,如果使用含有约1升水在盆容量的沙介质(见表 2),开始实验时,植物发生约100mL每天。如果使用以泥炭为基础的介质,在罐容量下可容纳约2升的水(见表 2),则当植物每天发生约200 mL时,开始测量。 - 通过测量(手动)早晨与晚上几株幼苗的重量差异,在将植物装载到系统之前,估计其最初的每日蒸腾。
- 与小植物合作时,在每个锅中放入几株植物(例如,在一个3.9 L锅23中放入六种阿拉伯植物,以达到推荐的最小蒸腾水平)*。
- 当植物的容量达到最大盆水容量的 10% 时,开始实验。
4. 设置实验
注:实验的设定过程考虑到系统所有部分的重量,即盆栽介质的重量(包括盆容量的土壤-水重)和幼苗的初始重量。按照以下步骤操作:
- 如果可能,使用具有类似权重的类似静态组件。静态重量组件包括锅组、土壤探头和其他塑料部件。
- 要开始新的实验,请打开操作软件。打开 屏幕 左侧菜单中的"实验"选项卡。单击" 创建新" 或通过右键单击所需的实验并选择"重复"来复制先前实验中 的实验属性。重命名实验(补充图 1B)。
- 确保系统中当前运行的不同实验中未使用任何单元。检查工厂表中的所有工厂与实验设计匹配。如果没有,请根据设计更改表(请参阅第 5.18、6 节 和附加图 1C)。
- 单击实验名称,然后单击"开始"开始 实验。
- 手动测量预先准备的空锅(双锅、网、斗杆和黑色垫圈)。如果使用彼此相似的零件,则其中 10 个部件的平均重量就足够了。
- 将灌装介质与一些水彻底混合,至少1小时,使其分解成均匀颗粒并饱和,以确保均匀性和均匀性。对于首次使用的用户,我们强烈建议使用多孔陶瓷、中小型(参见 表 1 和 表 2)。作为第二个选项,使用粗砂。
- 使用机械搅拌机(例如混凝土搅拌机)。
- 当使用高度均匀的介质(即工业砂)时,跳过步骤 4.6.1。
- 用适当的盆栽介质(如沙子、土壤或泥炭)均匀地填充所有盆栽,以进行实验。
- 将一个腔模(图3B)的铸件(图3B)在形状和大小上与幼苗(从腔盘)的根土塞插入盆栽介质的中间。完全推入。将锅底对着地板几次,以确保盆栽介质在锅中分布良好。对所有锅重复。
- 把锅水浇水,然后冲洗掉锅外。让锅排干 30 分钟,然后继续执行下一步。确保锅自由排水。如果灌装介质排水速度过慢(例如,密集的泥炭),请用通风基板(例如,颗粒物;另见表 1和 表 2)预混,以确保更快的排水速度。
- 完全停止排水后,根据实验设计,将所有填充的锅放在 lysimeter 阵列的中心(在已有的绿色容器中)上(图2A)。
- 检查绿色容器是否正确安装到称重传感器盖中,并且是否彼此接触。
- 在操作软件中,打开 "实验" 选项卡并选择" 测量组件" 选项卡。单击"测量 "对象。将测量名称为"1st 测量"(补充图 1D)。
- 将灌溉滴灌器、探头和锅盖放在每个锅上。确保多出口滴管和探针电缆的管路由各自的支架支撑(连接到每个 lysimeter 刻度装置的装置上; 图1E)之前把它们放在锅里。确保所有滴管、探头和盖板都牢固定位。
- 等待长达 3 分钟,以进行新的测量(每 3 分钟自动收集数据),然后打开"实验 " 选项卡。选择"实验 "选项卡,然后单击"实验 "。Meta 标记此测量到采取的"1st 测量",并命名它"静态组件"(补充图 1E)。当想要记录通过从另一个测量值中减去一个测量值确定的权重值时,使用元标记。
- 对系统进行任何必要的调整后,等待记录新数据点(每 3 分钟一次),然后再进行下一次测量。
- 检查 "静态组件 "列以确认"工厂"表中记录的值不包括异常值。如果记录的任何重量过低或过高,请检查负载单元是否有任何干扰(例如,确保没有接触负载单元),然后进行新的测量(在系统静止 3 分钟后)。
- 单击"工厂 " 选项卡。将"植物"表导出为电子表格,将平均锅重量(从步骤 4.5)添加到静态组件的测量中 - "重量"。保存并上传文件(导入选项卡)。
- 确保所有滴管都牢固地插入灌装介质和来自控制器的管道中。回到操作软件中,在" 实验"选项卡 中,选择 "处理方案"。单击 "创建新" 以创建新的"计划"。
- 在计划中,选择第一步(如果需要,创建新步骤)并打开它。选择"测试"治疗和"从不"终止。在步骤选项中,选择实验上方"灌溉处理"选项卡中列出的任何 处理 方法(补充图 1F; 另请参阅步骤 4.21)。按"应用 " 选项卡。
- 将"植物"表提取为电子表格,将"计划"添加到"处理"列,并将"1"添加到"步骤"列。保存并上载文件。
- 在 "灌溉处理 "选项卡下,选择"测试"处理,并设置为 4-5 分钟的灌溉时间[根据所用土壤的体积含水量 (VWC) 的确切时间量]进行排水。提前2分钟,到温室的盆栽。也可以创建其他治疗方法。(请参阅步骤 7.4 中的详细说明。
- 目视检查所有滴管是否正常工作,以及水是否从绿色容器的穿孔排水塞中滴出。
- 在实验中,将计划"X"第1步(见步骤4.19-4.20)的灌溉处理更改为所需的灌溉处理。确保将每晚的灌溉(带铁杉; 参见表3, 了解使用的施肥成分)分为几个短脉冲(事件),它们之间会大量暂停(每晚至少三次事件),以确保土壤在黎明前达到其田间容量。
- 让灌溉计划运行1或2天,让土壤达到其田间容量,并持续到下一阶段。
5. 开始实验
注:在此阶段收集的数据将用作实验其余部分的参考值。因此,必须仔细执行后续步骤。
- 重复步骤 4.18 到 4.20。或者,在清晨开始这个过程,在最新的灌溉步骤后不久。
- 目视检查所有盆水是否都灌溉过,多余的灌溉液是否从绿色浴池的穿孔排水塞中滴出。
- 拆下绿色容器的绿色无穿孔塞(从最低孔)中,让水完全排出。然后,将插头放回其位置(图1D)。如果处理"排水 0"(即底部孔打开/最低孔上连接的空心排水塞),请跳过此步骤。
- 在操作软件中,打开实验的选项卡,转到 "测量组件"。单击 "测量 对象",将测量名称为"强制"。轻轻地从锅中取出所有铸件,然后等待 3 分钟,以记录新的测量值(补充图 1D)。
- 单击 "测量对象",将"强制后"命名,并元标记度量值为"强制"。该选项将自动计算两个测量值之间的差值,并给出铸件权重以验证权重灵敏度。
- 检查"工厂"表中的权重值。"铸柱"测量值之间的差值不应大于 20 或 30 g。
- 要测量湿土的重量,请在操作软件中转到实验中 的"测量成分 "选项卡,然后选择" 测量土壤湿重量" 选项。当被询问时,单击 "确定"进行 测量。检查瑜伽实验植物表中的土壤湿重量测量值。重量将显示在"土壤湿重"列(补充图 1D,G ) 中。
- 如果某些测量值似乎波动不当,请执行以下操作:
- 确认每个锅的位置正确,并且没有接触任何相邻的锅。
- 断开桌上的第一个控制器与电(其余控制器串行连接在一起,因此也将关闭)2分钟,然后重新连接它。
- 手动测量几个 (5–10) 腔的平均重量与盆栽介质 (从步骤 2.3) 没有幼苗 (土壤塞) 。[在手动测量之前,确保土壤塞水灌溉良好(即排水后田间容量)。在"测量组件"选项卡中,按"设置苗木散装土壤重量"并填写平均重量(补充图 1D)。
- 单击测量工厂初始重量。第一次测量是种植前的参考点(补充图1D)。
- 确保腔盘中的幼苗灌溉良好(即排水后田间容量)。根据实验设计,用根土塞轻轻拔出腔,确保不伤害幼苗,并小心地将它们放入盆中铸件的腔中。最好在黎明或黄昏转移植物,以尽量减少对植物的压力(即,尽量减少枯萎)。
- 等待 3 分钟。再次 单击"测量工厂初始权重 "。第二个测量是植物初始重量。元标记测量值到第一个(参考点)。该软件将计算两个测量值之间的差值,并减去苗木散装土壤重量。结果是植物的初始权重。
- 检查实验的"植物"表中的测量值,以确保它们属于合理且合乎逻辑的范围内(补充图 1C)。
- 通过重复步骤 4.18 到 4.20 使土壤饱和。
- 确保所有锅都排出得当。如果没有,请重复饱和过程。等待 30 分钟,让排水停止。(另 见表 1, 了解正确选择的盆栽介质。
- 在"测量组件"选项卡下,单击"测量保留水重量"(附加图 1D)。
- 提取植物表作为电子表格,从保留的水重量测量("保留水库存"列)中减去测量的植物初始重量和苗木散装土壤重量。上传文件(补充图1C)。
- 确认记录的每日蒸腾的时间段适合实验的目标。填写适合项目的实验常规选项卡中的值(补充图 1H)。
- 填写零小时:软件检查是否需要移动到治疗方案中的下一步的时间。
- 填写每日蒸腾值:每日蒸腾计算为白天两个权重窗口之间的差值,用于所有天。每日蒸腾开始时间是软件开始测量平均重量的时间。
- 在开始新实验之前,对植物进行1~2天的监测(重复并重命名实验)。
6. 更改植物表
- 将"植物"表提取为电子表格,并根据需求更改表。 不要更改工厂 ID、名称或位置。 保存并上载文件。
- 标签(分组)列:要根据常见标签(例如处理、行)显示或分析(请参阅步骤 8)分组的植物,请添加以 # (例如,#Treatment) 开始的新列和标签。在此列中,为每株植物创建符号(例如,对于"#Treatment"标签,将植物标记为干旱、控制等; 补充图 2.
注:上面介绍的协议是该系统最先进、最全面的协议。但是,首次使用的用户可能希望从简化协议开始(请参阅补充 MS)。简化的协议产生有关较少特征的信息,并可能导致更高的噪声水平。但是,同时,它提供了一种更容易熟悉和熟悉最重要的实验程序,硬件和软件的方法。
7. 运行实验
- 计算土壤重力含水量/土壤含水量(SWC 值)。
注:重力土壤含水量不同于体积土壤含水量(VWC)。- SWC 值是土壤干重与土壤湿重之间的比率。要计算 SWC,请使用三个额外的土壤填充锅(步骤 1.3),没有植物,以前没有准备,并放置在温室内的侧桌上几天,并定期灌溉。在清晨,在上次灌溉事件后,尽快称量铝托盘中的湿土。
- 用烤箱(105°C)中的土壤将铝托盘干燥4~5天。通过连续测量至少 60 分钟的重量,验证土壤是否完全干燥。如果重量相同,土壤确实干燥,最后测量可以记录为干土重量。
- 在操作软件中,转到测量组件并单击"计算土壤干重"选项卡。填写每个样品的土壤湿和干重量,单击"应用"和"完成"(附加图 3)。 Finish
- 或者,使用如下所示的公式手动计算 SWC。

- 从至少三个锅中手动测量的两个 SWC 测量平均值。选择"测量组件"选项卡,然后单击"计算土壤干量"值,然后单击"应用"和"完成"。所有实验锅的土壤干量将由软件自动计算(假设实验中所有锅都含有相同的介质;补充图 1D 和补充图 3.
- 应用灌溉处理。灌溉方案可以通过制定分步处理计划来应用。
- 要制定新的灌溉处理计划,请转到 灌溉处理,单击 "创建新"并命名新处理。在灌溉处理列表中打开特定处理,然后单击默认的"00:00"。
注:在主窗口(补充图4A),"时间"指示阀门将打开的时间(即灌溉处理的开始)。"阀门"是要打开的阀门(A 或 B,具体取决于连接到所需溶液的阀)。"命令类型"表示将用于确定阀门何时关闭的数据类型:- 按时间 = 阀门将打开多少秒。
- 按重量 – 通过灌溉将体重增加/水(以克为单位)添加到锅中。
- 通过蒸腾 – 根据前一天每个植物的蒸腾情况,可对每个盆水进行差异化应用。用户可以决定在灌溉期间应用前一天的蒸腾百分比。(在灌溉良好的条件下,建议给予植物超过100%,以洗涤土壤和补偿植物生长。应少给抗旱植物浇水,根据所需的干旱应力率精确处理。
- 通过传感器 – 可根据传感器读数应用灌溉,例如明显的介电允许性(可用于确定 VWC)。选择传感器类型、所需参数和所需参数值。
- 所有可能性都包括一个"退出时间"选项,即使未达到设置条件,也会关闭点击。将"出时"设置为比设定条件长的时间段。
- 在定义实验的灌溉处理后,在实验列表中打开所需的实验,打开处理方案,打开默认计划并选择第一步(补充图4B)。
- 在 治疗中,从列表中选择灌溉处理。然后,在 终止中,选择适当的条件以停止当前步骤,然后转到下一个步骤。
- 选择灌溉方案后,打开实验的植物表(补充图2),并输入每个植物的"处理"和"步骤"。"治疗"是治疗方案的名称,"步进"是治疗场景中的事件编号。
- 要制定新的灌溉处理计划,请转到 灌溉处理,单击 "创建新"并命名新处理。在灌溉处理列表中打开特定处理,然后单击默认的"00:00"。
- 计划一次干旱治疗。
- 每个植物都有独特的蒸腾率,基于其大小和在温室中的位置。为了实现标准的抗旱处理(即,在治疗期间所有锅的干燥率相似),计划一个干旱情景,并通过系统的反馈灌溉工具控制它(补充图5)。
8. 使用数据分析软件分析数据
- 打开数据分析软件(例如 SPAC 分析)。单击右上角选择控制系统和实验名称(补充图 6A)。在屏幕左侧的列中,选择"实验"(补充图 6B),并在"搜索"部分下的"名称"栏中键入实验的名称。实验的名称将显示在"搜索"部分的"搜索"部分(补充图 6C)的下方。单击实验以打开信息和植物部分(补充图 6D)。
- 在"信息"部分中,编辑 WUE 开始日期和 WUE 结束日期至少为干旱处理开始前 3 天(最好更多)的期限,然后单击"更新 "。每个锅的WUE 和 R2值将显示在"植物"部分中。单击"活动"列下的"眼睛"符号,然后红色,选择排除任何具有负WUE值或 R2值小于 0.5 的刻度。这将从所有进一步计算中排除所选比例(工厂)。可以通过单击"工厂"部分中的"导出数据"按钮(补充图6D )导出数据。
- 在"尖叫"左侧的列中,单击"分析 "。然后会出现不同的小节:图形查看器、直方图、T 检验、ANOVA 和片形线性曲线。
- 单击图形 查看器。在 "筛选" 部分中,设置实验的日期。
- 单击标签(请参阅步骤 6)以选择实验组(基因型)和治疗的组合。自动,所选组中的所有盆都将显示在"工厂"小节中。在该小节中,通过单击任何盆(植物)来取消选择它们。一次最多可以选择两个不同的参数作为"Y1 参数"和"Y2 参数"。最后,单击"显示图"(补充图 5)。
- 所选参数值的线图将显示在每个工厂的"图形查看器"窗口中。从单个工厂中删除数据,或通过单击图形右侧的图例符号添加到图形中。在右上角,还有一个选项可以导出数据作为电子表格和放大图形查看器窗口以填充全屏(此原始数据下载功能与所有其他窗口相关)。如果光标移动到屏幕的右上角,将显示更多修改图形的选项(附加图 5)。
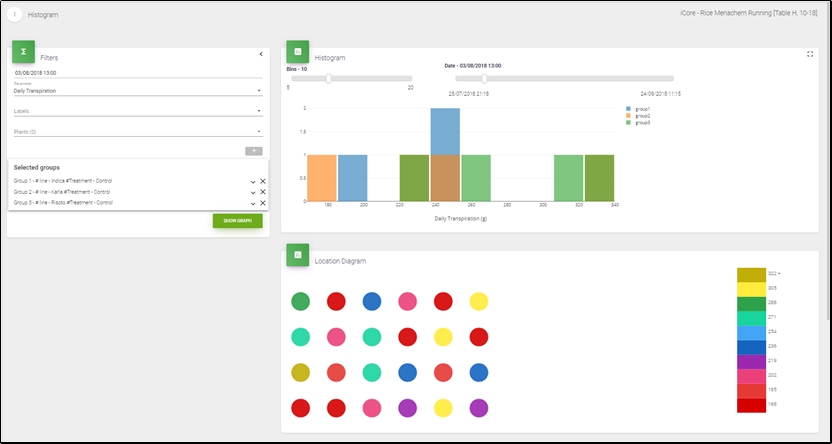
- 直方图模块显示给定时间段中种群中和种群之间的单个特征的分布。要使用此模块,请单击直 方图。
- 在"筛选器"部分中,设置日期和时间、参数、标签和工厂,如步骤 8.4.1 中所述。通过单击 + 符号选择多个标签(组)。最后,单击"显示图"(附加图 7)。
- 直方图将显示在直方图部分,其中可以选择更改屏幕顶部的"Bins"和"Date"。在右上角,有步骤 8.4.2 中描述的各种选项。在位置图部分中,可以看到实验台上植物的实际位置及其各自的特征值(补充图 7)。
- 单击 T 测试。要统计比较两组任何测量特征的度量,请在步骤 8.4.1 中解释的"T-测试参数"部分中输入日期、标签、植物和参数。
- 设置小时范围以计算感兴趣时间段内数据点的平均值(默认值为连续 24 小时表示)。最后,单击"显示图"(附加图 8)。
- 屏幕右侧将显示两个窗口。顶部一个是从两个组选择的所有植物的图形查看器部分。该窗口下方是 T 测试部分,其中将显示两组的比较作为 所选生理参数的 t-test。通过更改 T 测试部分左α角的"点"值,可以调整显著性级别。红色点将显示在明显不同的值下。在右上角,查看各种选项,如步骤 8.4.2 中所述(补充图 8)。
- 单击 ANOVA。要统计比较两个组中任何测量特征的度量,请在步骤 8.5.1 中解释的"过滤器"部分中输入日期、标签、植物和参数。
- 通过单击 + 符号(如步骤+8.5 所示)选择多个标签(组)。设置小时范围。最后,单击"SHOW GRAPH"(补充图9)。
- 在 ANOVA 部分中,使用 ANOVA 测试(Tukey 的 HSD)比较不同组生理参数。条形表示标准错误(±SE)。在屏幕的右上角,有各种选项,如步骤 8.4.2 中所述。单击线图以查看特定一天的条形图比较。不同的字母表示彼此明显不同的组(补充图9A)。
- 与基于时间的方法相比,呈现全植物蒸腾动力学或口腔传导与VVC之间的关系是比较不同植物对干旱的生理反应的更准确方法。使用"分段线性曲线"函数呈现此关系。
- 单击 "分片线性曲线"。输入日期、标签、植物和参数(x 轴和 y 轴),然后在"筛选器"部分中设置小时范围,如上所述。
注:"开始"日期应尽可能接近治疗开始日期。 - 将 x 轴参数设置为 VWC,将 y 轴参数设置为选择的生理参数(例如,蒸腾速率、口腔电导等)。最后,单击"显示图"。在"筛选"部分中,单击"选择所有建议",然后单击"显示图"(补充图 10)。
注:通过SPAC软件(如补充图 9C),可轻松获得其他生理参数(如规范化蒸腾、蒸腾率、植物初始重量、口腔传导、根通量等)和环境参数(如温度、相对湿度等)。有关其计算的理论背景,请参阅 Halperin 等人(2017 年)。
- 单击 "分片线性曲线"。输入日期、标签、植物和参数(x 轴和 y 轴),然后在"筛选器"部分中设置小时范围,如上所述。
结果
实验时间为29天。实验是在8月份进行的,当时当地天气温暖稳定,天长。使用了两种不同的灌溉方案,以演示表型平台在存在干旱压力的情况下比较三种不同品种水稻(即稻谷、卡拉和里索托)的生理行为的能力。有两种抗旱处理:(一) 最佳灌溉[直到灌溉(控制)后每个锅在夜间达到其盆栽容量]和(二) 试验开始5天后开始的干旱,持续14天,随后是10天的恢复期(最佳灌溉,第19-29天)。为了简单起见,并非所有的品种和组都显示在这里显示的数字。结果表明,HTP遥测系统能有效地测量大气条件、土壤和植物生理的变化。
环境条件
在整个实验中,大气探测器监测了环境条件[光合作用活性辐射(PAR)和蒸汽压力不足(VPD)]。收集的数据表明,PAR和VPD在不同的日子和一天中仍然相似(图4)。
在整个实验期间,通过土壤探针测量了抗旱锅的VVC。从一个经过干旱处理的 cv 中收集的 VWC 数据。稻谷植物图图5 所示。
生理参数
在实验的第一阶段,所有四种治疗方法(卡拉控制、卡拉干旱、里索托控制法和里索托干旱疗法)的每日蒸腾逐渐增加,在此期间,所有植物都得到良好灌溉。后来,与两种缺水疗法的干旱期(第5天至第18天)有关的蒸腾减少了。随后,在恢复期间(从第18天起),两个缺水群体的每日蒸腾再次增加,但比干旱处理前观察到的水平低得多(补充图9B)。
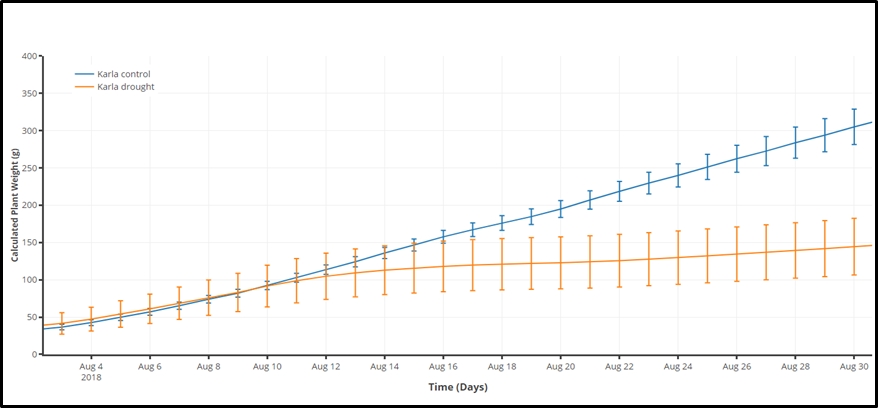
在实验的第一阶段,当所有植物都得到类似的灌溉时,计算植物重量(即植物体重增加率)在Karla控制和卡拉干旱处理中均值持续增加(第1-5天)。当干旱治疗应用于cv。卡拉植物(第5-18天),这些植物停止增加体重,直到恢复阶段才恢复体重。在这一点上,重量的增加比对照观察到的要慢。相比之下, 卡拉控制植物的重量在整个实验期间持续增加 (图6)

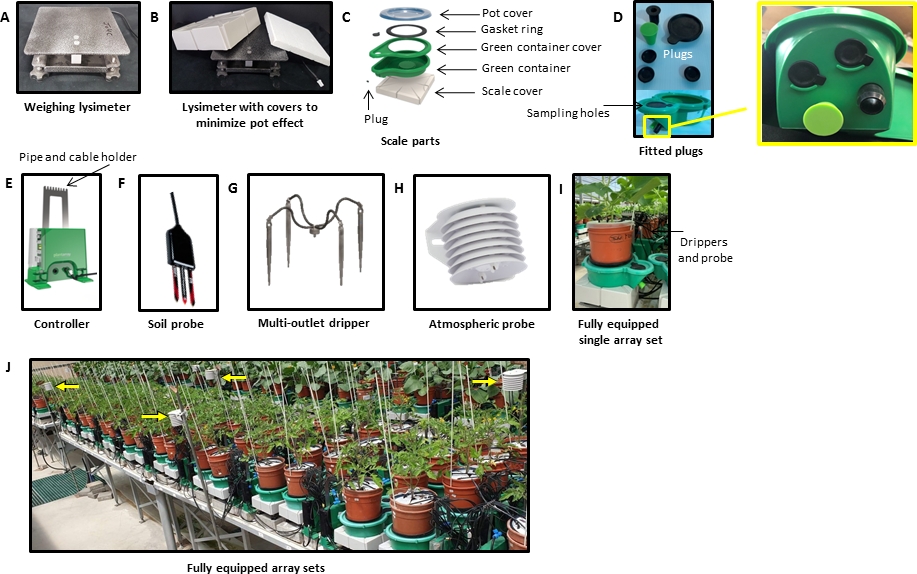
图1:重力表型系统的组件和设置。
(A) 称重度计。lysimeter 包括将物体的机械负载转换为电荷的称重单元,以及覆盖称重单元上部和下部部分的金属平台,以便正确测量物体的重量。(B) 晶硅计上覆盖着聚苯乙烯块和用于隔热的塑料盖。(C) 缩放零件。储水罐(绿色容器)放置在水表盖上,以收集从储液罐中排出的液体。绿色容器与绿色盖耦合,它有一个大的圆形开口,通过它插入锅。黑色橡胶垫圈连接到绿色盖的一侧,锅连接到另一侧,以尽量减少从容器蒸发造成的水损失。绿色盖在排水延长线上方有两个采样孔(小孔和大孔),用橡胶塞密封。(D) 插头。容器具有一个排水扩展,具有不同高度的四个孔(带插头),可用于在通过特定孔停止排水后调整容器中的水位(保留水量)。所需的水量将取决于植物种类、使用的盆栽介质类型和植物的水需求(即估计的每日蒸腾量)。(E) 控制单元由一个绿色矩形箱组成,其中包含电子控制器和电磁阀。有孔,通过铁杉溶液可以进入和退出锅,以及插座连接称重传感器和不同的传感器。不同的处理,如不同水平的盐度或不同的矿物成分,可以通过施肥溶液应用。金属支架连接到控制器,以容纳管道和电缆,并防止它们接触锅和增加重量。 所需的其他组件是 (F) 土壤探头 (例如,湿度、温度和 EC 传感器 - 5TE)、可选 (G) 多出口滴注器 (用于施肥和/或处理应用) 和 (H) 大气探头 [用于测量蒸汽压力不足 (VPD) 和辐射]。(I) 设备齐全的单阵列。(J) 温室中设备齐全的阵列,黄色箭头指向大气探测器,使口腔电导根据当地大气条件实现正常化。 请单击此处查看此图的较大版本。
{kind=link}

图 2:单个锅设置所需的零件。
(A+C)需要以下组件:一个4L锅,一个4L锅,没有底部作为网架,一个圆形的尼龙网(孔径= 60网)的直径是锅底的两倍,一个盖有指定孔的植物和灌溉滴灌器,一个60厘米,白色玻璃纤维棒(杆)和一个黑色垫片环。(D) 表格计划示例,其中盆已随机化。在温室里,每张桌子有1~18根柱子和四排,在这里我们用了24个位置。但是,阵列结构可以根据自身温室的大小轻松调整为任何形状。 请单击此处查看此图的较大版本。
{kind=link}

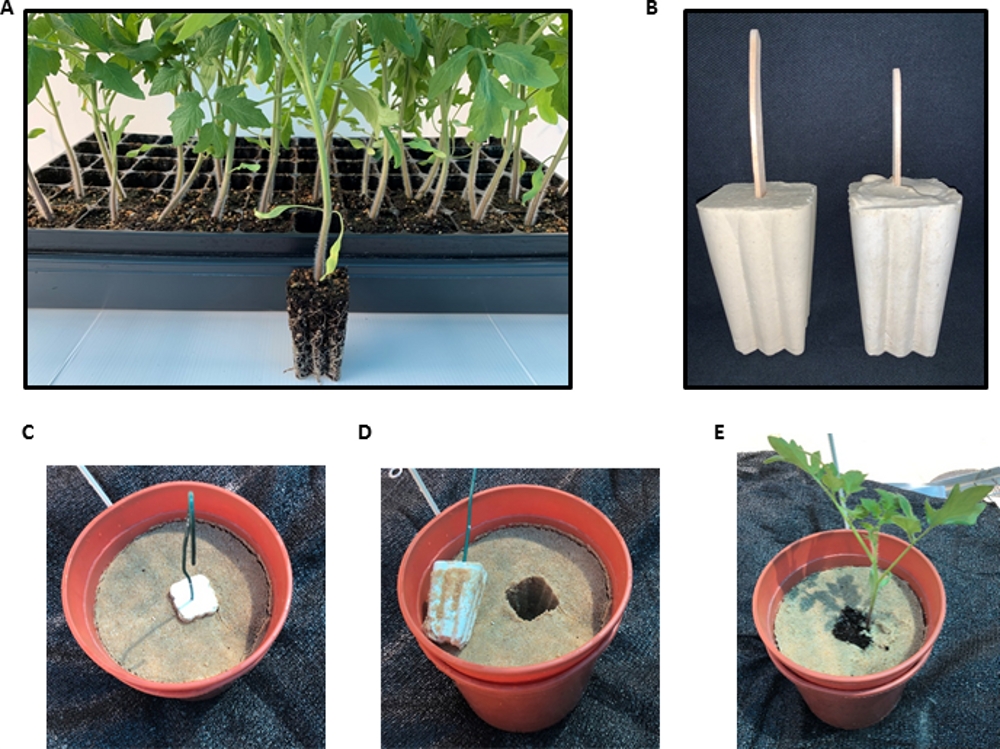
图3:锅设置。
(A) 生长在空腔托盘中的植物。(这里展示的番茄幼苗只是一个例子;许多其他植物物种也可以以同样的方式生长)。(B) 为 (C) 的模具铸件在盆栽介质中产生空腔,使(D)与幼苗的根土塞紧密配合,确保(E)幼苗成功移植到盆中。 请单击此处查看此图的较大版本。
{kind=link}

图4:实验过程中大气条件。
右侧的 y 轴显示每日蒸汽压力不足 (VPD),左侧的 y 轴显示实验连续 29 天的光合作用活性辐射 (PAR)。此图表由数据分析软件生成。 请单击此处查看此图的较大版本。
{kind=link}

图5:在实验过程中,土壤探针测量的体积含水量(VWC)。
数据表示一个 cv 的 VWC 值。在整个试验期间接受干旱处理的稻谷植物,包括恢复。此图表由数据分析软件生成。 请单击此处查看此图的较大版本。
{kind=link}

图6:整个实验期间整个±(± SE)的整植物重量(表示 SE)。卡拉在灌溉(控制)和干旱条件下。
使用 ANOVA(图基的 HSD; p < 0.05)。每个均± SE 表示至少四个植物。数据分析软件制作了图表和统计分析。 请单击此处查看此图的较大版本。
{kind=link}
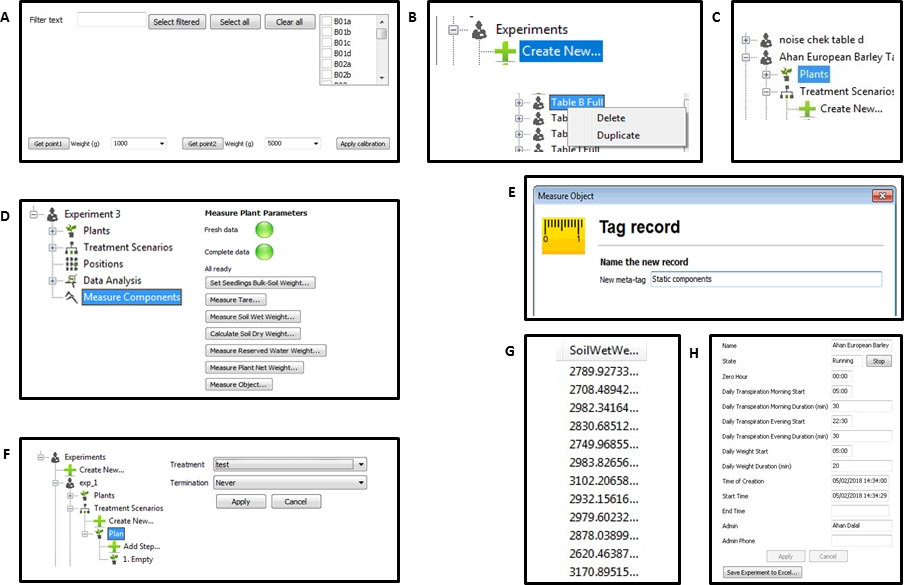
补充图1:用于设置实验的操作软件窗口。请点击这里下载此图。
{kind=link}
补充图2:"植物"表作为电子表格;操作软件。请点击这里下载此图。
{kind=link}
补充图3:计算土壤干重的软件窗口;操作软件。请点击这里下载此图。
{kind=link}
补充图4:设置灌溉处理的软件窗口;操作软件。请点击这里下载此图。
{kind=link}
补充图5:数据分析图查看器窗口。 在我们的实验中,我们使用了三种水稻品种(即稻谷、卡拉和里索托)和两种不同的灌溉情景,即灌溉(控制)和干旱。原始数据表明,在实验过程中,植物的重量变化。每行代表一个植物/盆。在白天,植物发生,所以系统减轻了重量,可以看到在日常曲线的斜坡。锅每晚被灌溉到满容量,如曲线中的山峰。灌溉事件之后,在灌装介质饱和后,将多余的水排灌。最初,所有的植物都灌溉良好(控制)。从2018年8月7日开始,一半的植物受到干旱处理。与此同时,其余的植物继续得到最佳灌溉。从2018年8月20日开始(允许每株植物承受类似程度的压力),并一直延续到实验结束,通过恢复对干旱处理植物的灌溉,实现了差异化恢复。 请点击这里下载此图。
{kind=link}
系统的反馈灌溉工具使用户能够根据时间、锅重、土壤传感器(如 VWC)的数据或前一天的植物蒸腾为每个单独的盆水设计灌溉程序。每个工厂都可以根据自己的性能以定制的方式单独灌溉。这种差分灌溉最大限度地减少了植物土壤水分含量之间的差异,因此,所有植物都能够受到受控的干旱处理,而不管它们各自的水需求如何。
补充图6:数据分析数据分析窗口。请点击这里下载此图。
{kind=link}
补充图7:数据分析直方图窗口。 此图显示了在灌溉(控制)条件下三种不同水稻品种(即稻谷、卡拉和里索托)中每日蒸馏值分布的图形表示。底部图表示植物每日蒸腾的热图可视化,基于桌上盆栽的物理位置。 请点击这里下载此图。
{kind=link}
补充图8:数据分析T-测试窗口。线表示两个水稻品种(即卡拉和里索托)在灌溉(控制)条件下每天蒸腾(一个基本和重要的生理特征)的差异。该窗口显示单个植物的每日蒸腾(右上)以及使用学生 t-test(右下)进行的每个组的± SE 的用值t的比较。统计分析由软件自动执行。红点表示根据学生的 t -测试治疗之间的显著差异;p < 0.05.请点击这里下载此图。
{kind=link}
补充图9:数据分析 ANOVA 窗口。(A) 在整个试验期间,两个水稻品种(即卡拉和里索托)在灌溉(控制)和干旱条件下每天的蒸腾差异的图形表示。抗旱工作在实验开始5天后开始。单击任何一天将呈现 使用 ANOVA( 图基的 HSD)的 (B) 组比较; p < 0.05), 这里 8 月 12 日。每个均± SE 表示至少四个植物。在整个实验期间,相同的组 也可以作为(C) 连续全植物蒸±(±SE)进行。数据分析软件制作了图表和统计分析。 请点击这里下载此图。
{kind=link}
补充图10:数据分析条形线性曲线窗口。 此窗口显示干旱条件下三个水稻品种(即稻谷、卡拉和里索托)的线性曲线。该软件可以对受干旱处理的植物的任何生理参数(这里,每日蒸腾)和计算的体积含水量(VWC)之间的关系进行分片线性拟合分析。 请点击这里下载此图。
{kind=link}
补充材料。请点击这里下载这些材料。
| 中等 | 描述 | |
| 粗砂 | 硅砂 20-30(通过该沙子的上下网屏:分别 0.841 和 0.595 mm) | |
| 细砂 | 硅砂 75-90(通过该砂的上下网屏:分别 0.291 和 0.163 mm) | |
| 泥炭基土壤 | 克拉斯曼 686 | |
| 洛米土壤(天然土壤) | 桑迪·洛姆土壤取自以色列雷霍沃特农业、食品和环境学院实验农场的一块地块的顶层 | |
| 蛭 石 | 维米库利特 3G | |
| 珍珠 岩 | 212 (尺寸范围: 0.5-2.5 毫米) | |
| 堆肥 | 本塔尔 11 盆栽土壤 | |
| 多孔、陶瓷、中小型 | 轮廓多孔陶瓷 20-50(通过接地陶瓷的上部和下网屏:分别 0.841 和 0.297 mm) | |
| 多孔、陶瓷、混合中型 | 轮廓多孔陶瓷 50% 20-50 网格和 50% 20-6 网格,0.841= 3.36 mm | |
表1:灌装介质。
| 土壤介质类型/参数 | 粗砂 | 细砂 | 洛米土壤 | 珍珠 岩 | 蛭 石 | 多孔陶瓷混合尺寸 | 多孔陶瓷小型 | 泥炭基土壤 | 堆肥 |
| 总水(TW,毫升) | 860 ± 7.2 (F) | 883.1 ± 24 (F) | 1076.3 ± 35.9 (E) | 1119.9 ± 8.5 (E) | 1286 ± 22.4 (D) | 1503.6 ± 15.4 (C) | 1713 ± 25.9 (B) | 1744.3 ± 8.2 (B) | 2089.6 ± 61.6 (A) |
| 体积含水量(大众、毫升3/毫升3) | 0.26 (F) | 0.27 (F) | 0.33 (E) | 0.35 (E) | 0.4 (D) | 0.46 (C) | 0.53 (B) | 0.54 (B) | 0.65 (A) |
| 散装密度 (BD, g/cm3) | 1.7 (A) | 1.6 (B) | 1.5(C) | 0.1 (H) | 0.2 (F) | 0.8 (D) | 0.7 (E) | 0.2 (G) | 0.1 (G) |
| 土壤重量稳定性(SWS,g/d) | ±2.3 ± 0.3 (B) | ±4.3 ± 0.3 (B) | ±2.9 ± 0.9 (B) | ±14.9 ± 0.7 (A) | ±7.6 ± 2.8 (B) | ±1.3 ± 0.1 (B) | ±1.9 ± 0.4 (B) | ±6.7 ± 0.8 (B) | ±4.3 ± 1.2 (B) |
| 土壤重量稳定性,浴缸中留有水(g/天;请参阅第6.14节) | 3 ± 0.4 (B) | 3.3 ± 0.4 (B) | 3.2 ± 1.2 (B) | 6.3 ± 0.5 (A) | 2.7 ± 0.8 (B) | 1.6 ± 0.3 (B) | 1.9 ± 0.3 (B) | 10.6 ± 3 (A) | 1.5 ± 0.3 (B) |
| 锅容量重力水分含量(SWC;请参阅第 8.2 节) | 0.18 (G) | 0.23 (G) | 0.23 (G) | 3.79 (C) | 3.0 (D) | 0.74 (F) | 0.99 (E) | 4.25 (B) | 6.13 (A) |
| 相对排水能力 | 非常好 | 中等 | 中低 | 非常好 | 非常好 | 非常好 | 非常好 | 低 | 中等 |
| 达到盆容量的相对时间 | 快速 | 快速 | 快速 | 慢 | 慢 | 快速 | 快速 | 慢 | 慢 |
| 相对阳离子交换能力 (CEC) | 低 | 低 | 低 | 低 | 高 | 高 | 高 | 高 | 高 |
| 兼容: | |||||||||
| 洗根(实验结束时) | ++ | ++ | + | ++ | + | ++ | ++ | - | - |
| 营养/生物刺激剂处理 | ++ | ++ | - | ++ | + | + | + | - | - |
| 盐度治疗 | ++ | ++ | + | ++ | + | ++ | ++ | + | - |
| 准确测量增长率 | ++ | ++ | + | -,+ | + | ++ | +++ | + | + |
| 干旱后物理土壤结构恢复 | +++ | +++ | ++ | + | - | +++ | +++ | -,+ | - |
| * 总水 (TW, ml) = 土壤湿重 (在锅容量) = 土壤干重。体积含水量 (VWC) = TW/土壤体积。 | |||||||||
| 散装密度 (BD) = 土壤干重/土壤体积。土壤重量稳定性 (SWS) – 连续 4 天土壤湿重的平均变化(中盆容量,上次灌溉后无植物)。 | |||||||||
| 锅容量重力水分含量(SWC);有关计算,请参阅第 7.2 节。 | |||||||||
表2:9种不同盆栽介质的一般特性及其与重力平台的兼容性。 测量使用 4-L 锅,在场容量(罐容量)下填充 3.2 L 的介质。根据 Tukey 的 HSD 测试 ±(P < 0.05; 3 ≤ n ≤ 5), 数据显示为≤ se. 列 中不同的字母表示介质之间的显著差异。
| 费蒂格成分 | 最终浓度(ppm) | 最终浓度(mM) |
| 纳诺3 | 195.8 | 2.3 |
| H3PO4 | 209 | 0.000969 |
| KNO3 | 271.4 | 2.685 |
| 姆索4 | 75 | 0.623 |
| ZnSO4 | 0.748 | 0.0025 |
| 库索4 | 0.496 | 0.00198 |
| 摩尔3 | 0.131 | 0.00081 |
| 姆索4 | 3.441 | 0.0154 |
| 硼砂 | 0.3 | 0.00078 |
| C10H12N2NaFeo8 (Fe) | 8.66 | 0.0204 |
| 滴灌器(用自来水稀释后)最终灌溉溶液的pHH变化为6.5至7。 | ||
表3:费蒂格化组件。
讨论
基因型-表型知识差距反映了基因型x环境相互作用的复杂性(由18,24,审查)。有可能通过高分辨率,HTP-遥测诊断和表型筛选平台,可用于研究全植物生理性能和水关系动力学8,9,,缩小这一差距。基因型 x 环境相互作用的复杂性使表型成为一项挑战,特别是考虑到植物对不断变化的环境的反应速度。虽然目前有各种表型系统,但大多数系统都基于遥感和先进的成像技术。虽然这些系统提供同步测量,但在某种程度上,它们的测量仅限于形态和间接生理特征25。生理特征在对环境条件的反应或敏感性方面非常重要。因此,以非常高的分辨率(例如,3 分钟的间隔)连续和同时进行的直接测量可以提供非常准确的植物生理行为描述。尽管重力系统具有这些重大优点,但也必须考虑到这一系统有一些潜在的缺点。主要缺点是需要使用锅和温室条件,这可能给治疗调节(特别是干旱治疗的调节)和实验可重复性带来重大挑战。
为了解决这些问题,应规范应用应力,建立真正随机的实验结构,最大限度地减少盆栽效应,并在短时间内比较植物在环境条件下变化的多种动态行为。本文中描述的 HTP 遥测功能表型方法解决了这些问题,如下所述。
为了将工厂的动态响应与动态环境关联,并捕获复杂植物与环境相互作用的完整、大局,必须连续测量环境条件(图4)和植物响应(补充图9B)。此方法能够测量盆栽介质和大气的物理变化,同时测量植物特性(土壤+植物-大气连续体,SPAC)。
为了最好地预测植物在野外的表现,重要的是在尽可能类似于田间18的条件下执行表型过程。我们在半受控条件下的温室中进行实验,以尽可能模拟野外条件。最重要的条件之一是生长或盆栽介质。为重力系统实验选择最合适的盆栽介质至关重要。建议选择快速排水的土壤介质,允许快速实现锅容量,并且具有高度稳定的锅容量,因为这些功能允许重力系统进行更精确的测量。此外,还必须考虑在实验中应用的不同治疗方法。例如,涉及盐、肥料或化学品的处理要求使用惰性灌装介质,最好是具有低阳离子交换能力的栽锅介质。适用于低蒸腾植物物种的干旱处理最好适用于VC水平相对较低的盆栽介质。相比之下,适用于高蒸腾植物的缓慢干旱处理最好适用于VC水平相对较高的盆栽介质。如果实验后分析需要根(例如根形态、干重等),则使用有机物含量相对较低的介质(即沙子、多孔陶瓷或石质)将更容易在不损坏根质的情况下清洗根部。对于将持续较长时间的实验,建议避免使用富含有机物的介质,因为有机物可能会随着时间而分解。有关此主题的更多详细信息,请参阅表 1和表 2。
场表型和温室表型(场前)有自己的目标,需要不同的实验设置。战前表型有助于选择在实地表现良好的有希望的候选基因型,帮助使现场试验更有重点,更具成本效益。然而,场前表型涉及一些限制(例如,盆效应),可能导致植物的表现不同于在场条件18,27。,27小锅大小,蒸发和加热水,是温室实验中可能导致锅效应的因素的例子。此处描述的方法旨在以以下方式最大程度地减小这些潜在影响:
(a) 锅的大小是根据要检查的基因型选择的。该系统能够支持各种盆型(高达25升)和灌溉处理,从而能够检查任何类型的作物植物。
(b) 锅和百尺秤是绝缘的,以防止热量被转移和锅的任何加热。
(c) 该系统涉及精心设计的灌溉和排水系统。
(d) 每个锅都有一个单独的控制器,通过自我灌溉和自我监测处理实现真正的随机化。
(e) 软件在计算树冠口腔电导时考虑到了工厂的本地 VPD。请参阅图 1J中的多个 VPD 站本地化。
该系统涉及在田间植物密度上进行直接的生理测量,无需在植物之间大空间或移动植物进行基于图像的表型。该系统包括实时数据分析,以及准确检测每个植物的生理应激点(+)的能力。这使得研究人员能够监测植物,并决定如何进行实验,以及如何在实验过程中收集任何样本。该系统简单明了的重量校准,便于高效校准。高通量系统产生海量数据,这带来了额外的数据处理和分析挑战11,12。11,对从控制器直接输入到软件的大数据的实时分析是将数据转化为知识14的重要一步,对实际决策具有重大价值。
这种HTP-遥测生理表型方法可能有助于在近场条件下进行温室实验。该系统能够测量和直接计算植物对动态环境的水相关生理反应,同时有效地克服了与盆栽效应相关的大多数问题。该系统的能力在场前表型阶段极为重要,因为它们提供了预测植物生长早期阶段产量损失的可能性。
披露声明
作者没有什么可透露的。
致谢
这项工作得到了国际基金-国家自然科学基金联合研究方案(第2436/18号赠款)的支持,并部分得到以色列农业和农村发展部(Eugene Kandel知识中心)的支持,作为"问题的根源——利用现代农业的根区知识中心"的一部分。
材料
| Name | Company | Catalog Number | Comments |
| Atmospheric Probes | SpectrumTech/Meter group | 3686WD | Watchdog 2475 |
| 40027 | VP4 | ||
| Array Randomizer | None | The software "Array Randomizer" can be used for creating an experimental design of a randomized block design, or fully random design. It was developed to have better control over the random distribution of the experimental samples (plants) in order to normalize the atmospheric microvariation inside the greenhouse. | |
| Free download and more information, please click on the following link: https://drive.google.com/open?id=1y4QbTpxRK5Lx430xzu1RFdrlcL8pz_1q | |||
| Cavity trays | Danish size with curved rim for nursery | 30162 | 4X4X7 Cell, 84 cell per tray https://desch.nl/en/products/seed_propagation_trays/danish-size-with-curved-rim-for-nursery~p92 |
| Coarse sand | Negev Industrial Minerals Ltd., Israel | ||
| Compost | Tuff Marom Golan, Israel | ||
| Data Analysis software | Plant-Ditech Ltd., Israel | SPAC Analytics | |
| Drippers | Netafim | 21500-001520 | PCJ 8L/h |
| Fine sand | Negev Industrial Minerals Ltd., Israel | ||
| Loamy soil (natural soil) | |||
| Nylon mesh | Not relevant (generic products) | ||
| Operating software | Plant-Ditech Ltd., Israel | Plantarray Feedback Control (PFC) | |
| Peat-based soil | Klasmann-Deilmann GmbH, Germany | ||
| Perlite | Agrekal , Israel | ||
| Plantarray 3.0 system | Plant-Ditech Ltd., Israel | SCA400s | Weighing lysimeters |
| PLA300S | Planter unit container | ||
| CON100 | Control unit | ||
| part of the planter set | Fiberglass stick | ||
| part of the planter set | Gasket ring | ||
| Operating software | |||
| SPAC Analytics software | |||
| Porous, ceramic, mixed-sized medium | Greens Grade, PROFILE Products LLC., USA | ||
| Porous, ceramic, small-sized medium | Greens Grade, PROFILE Products LLC., USA | ||
| Pots | Not relevant (generic products) | ||
| Soil | Bental 11 by Tuff Marom Golan | ||
| Soil Probes | Meter group | 40567 | 5TE |
| 40636 | 5TM | ||
| 40478 | GS3 | ||
| Vermiculite | Agrekal , Israel |
参考文献
- Ray, D. K., Mueller, N. D., West, P. C., Foley, J. A. Yield Trends Are Insufficient to Double Global Crop Production by 2050. PLoS One. 8, 66428(2013).
- Food and Agriculture Organization of the United Nations. The future of food and agriculture: Trends and challenges. , Rome. (2017).
- Dhankher, O. P., Foyer, C. H. Climate resilient crops for improving global food security and safety. Plant, Cell & Environment. 41, 877-884 (2018).
- Chen, D., et al. Dissecting the phenotypic components of crop plant growthand drought responses based on high-throughput image analysis w open. Plant Cell. 26, 4636-4655 (2014).
- Ubbens, J. R., Stavness, I. Deep Plant Phenomics: A Deep Learning Platform for Complex Plant Phenotyping Tasks. Frontiers in Plant Science. , (2017).
- Danzi, D., et al. Can High Throughput Phenotyping Help Food Security in the Mediterranean Area. Frontiers in Plant Science. , (2019).
- Miflin, B. Crop improvement in the 21st century. Journal of Experimental Botany. 51, 1-8 (2000).
- Dalal, A., et al. Dynamic Physiological Phenotyping of Drought-Stressed Pepper Plants Treated With "Productivity-Enhancing" and "Survivability-Enhancing" Biostimulants. Frontiers in Plant Science. , (2019).
- Moshelion, M., Altman, A. Current challenges and future perspectives of plant and agricultural biotechnology. Trends in Biotechnology. 33, 337-342 (2015).
- Singh, A., Ganapathysubramanian, B., Singh, A. K., Sarkar, S. Machine Learning for High-Throughput Stress Phenotyping in Plants. Trends in Plant Science. 21, 110-124 (2016).
- Houle, D., Govindaraju, D. R., Omholt, S. Phenomics: The next challenge. Nature Reviews Genetics. 11, 855-866 (2010).
- Fiorani, F., Schurr, U. Future Scenarios for Plant Phenotyping. Annual Review of Plant Biology. 64, 267-291 (2013).
- Tardieu, F., Cabrera-Bosquet, L., Pridmore, T., Bennett, M. Plant Phenomics, From Sensors to Knowledge. Current Biology. 27, 770-783 (2017).
- Negin, B., Moshelion, M. The advantages of functional phenotyping in pre-field screening for drought-tolerant crops. Functional Plant Biology. , (2017).
- Gebremedhin, A., Badenhorst, P. E., Wang, J., Spangenberg, G. C., Smith, K. F. Prospects for measurement of dry matter yield in forage breeding programs using sensor technologies. Agronomy. 9, 65(2019).
- Roitsch, T., et al. New sensors and data-driven approaches-A path to next generation phenomics. Plant Science. 282, 2-10 (2019).
- Li, L., Zhang, Q., Huang, D. A review of imaging techniques for plant phenotyping. Sensors (Switzerland). 14, 20078-20111 (2014).
- Gosa, S. C., Lupo, Y., Moshelion, M. Quantitative and comparative analysis of whole-plant performance for functional physiological traits phenotyping: New tools to support pre-breeding and plant stress physiology studies. Plant Science. 282, 49-59 (2019).
- Araus, J. L., Cairns, J. E. Field high-throughput phenotyping: the new crop breeding frontier. Trends in Plant Science. 19, 52-61 (2014).
- Ito, V. C., Lacerda, L. G. Black rice (Oryza sativa L.): A review of its historical aspects, chemical composition, nutritional and functional properties, and applications and processing technologies. Food Chemistry. 301, 125304(2019).
- Anjum, S. A., et al. physiological and biochemical responses of plants to drought stress. African Journal of Agricultural Research. , (2011).
- Halperin, O., Gebremedhin, A., Wallach, R., Moshelion, M. High-throughput physiological phenotyping and screening system for the characterization of plant-environment interactions. The Plant Journal. 89, 839-850 (2017).
- Yaaran, A., Negin, B., Moshelion, M. Role of guard-cell ABA in determining steady-state stomatal aperture and prompt vapor-pressure-deficit response. Plant Science. 281, 31-40 (2019).
- Dalal, A., Attia, Z., Moshelion, M. To produce or to survive: how plastic is your crop stress physiology. Frontiers in Plant Science. 8, 2067(2017).
- Araus, J. L., Kefauver, S. C., Zaman-Allah, M., Olsen, M. S., Cairns, J. E. Translating High-Throughput Phenotyping into Genetic Gain. Trends in Plant Science. 23, 451-466 (2018).
- Ghanem, M. E., Marrou, H., Sinclair, T. R. Physiological phenotyping of plants for crop improvement. Trends in Plant Science. 20, 139-144 (2015).
- Sinclair, T. R., et al. Pot binding as a variable confounding plant phenotype: theoretical derivation and experimental observations. Planta. 245, 729-735 (2017).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。