
Method Article
噬菌体和机器人辅助的近乎连续进化的实用指南
摘要
噬菌体和机器人辅助近连续进化 (PRANCE) 是一种快速、稳健的蛋白质进化技术。机器人技术允许实验的并行化、实时监控和反馈控制。
摘要
机器人加速进化技术使用反馈控制提高进化的可靠性和速度,改善蛋白质和生物体进化实验的结果。在本文中,我们介绍了设置实现噬菌体和机器人辅助近连续进化 (PRANCE) 所需的硬件和软件的指南。PRANCE将基于噬菌体的快速分子进化与同时运行数百个独立的、反馈控制的进化实验的能力相结合。本文将介绍PRANCE的硬件要求和设置,包括液体处理仪器、酶标仪、辅助泵、加热器和3D打印容器。我们描述了如何配置液体处理机器人以与基于 Python 的开源软件兼容。最后,我们为前两个实验提供了建议,这些实验可以使用新构建的PRANCE系统进行,该系统可以锻炼其功能并验证系统是否准备好进行多路复用演化。本指南旨在作为一本手册,用于导航与进行机器人加速进化相关的大量设备设置。
引言
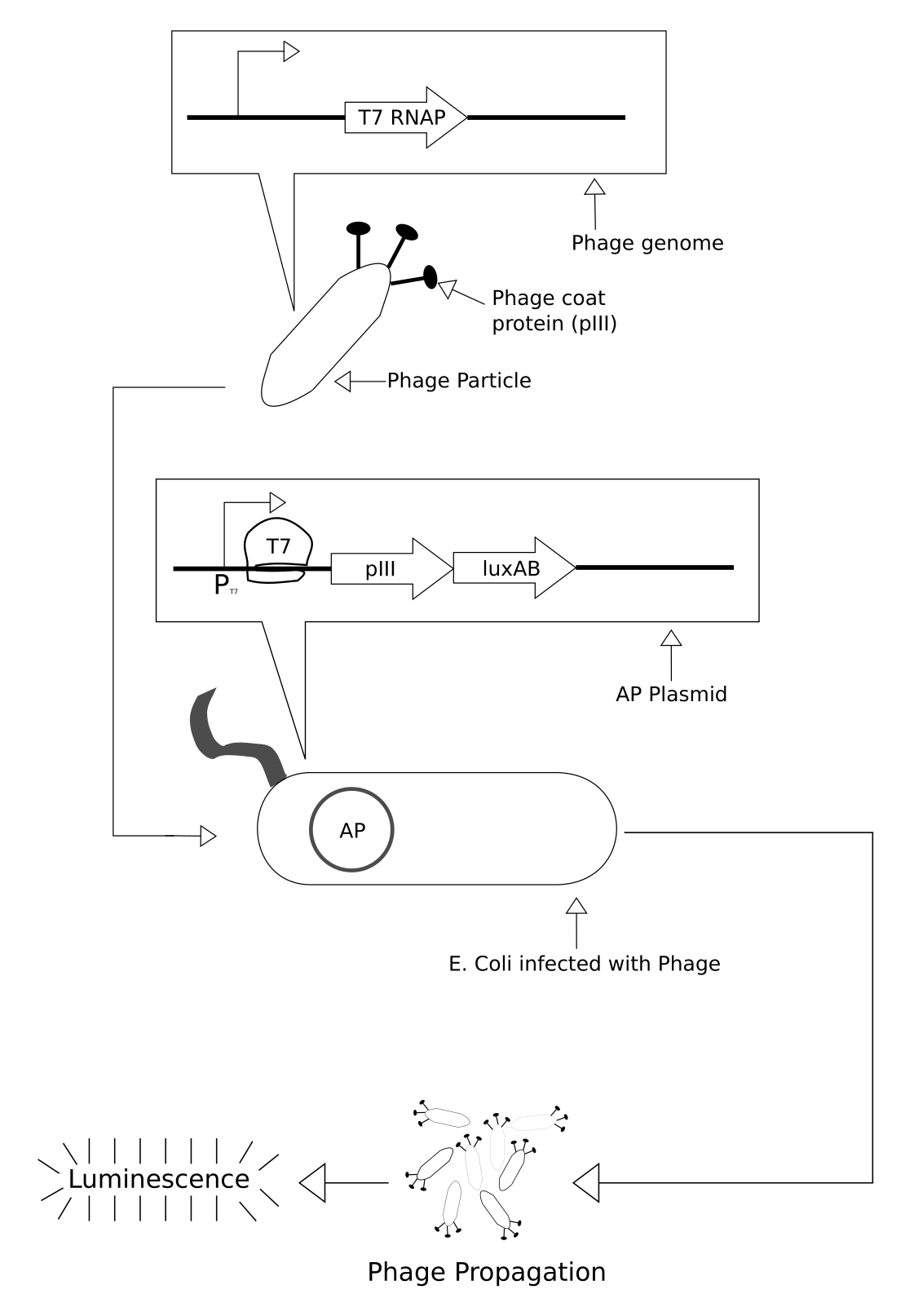
PRANCE是两种强大的定向进化技术的结合。首先是 PACE1,这是一种分子技术,可将多轮基因多样化和选择与 M13 噬菌体的快速生命周期相结合,从而在液体噬菌体培养物中连续发生快速进化轮次。这种选择是由使用质粒编码的基因回路驱动的,该回路将进化蛋白的功能与噬菌体繁殖所需的 M13 尾壳蛋白 pIII 的表达偶联,如图 1 所示。在实验水平上,液体噬菌体培养物的连续稀释允许连续选择。因此,通过控制噬菌体培养稀释率,可以在基因回路水平和实验水平上调节选择严格性。因此,PACE可以应用于任何生物分子工程挑战,其中有一种分子传感器可以检测大肠杆菌中诱导pIII表达的所需活性。应用包括蛋白质-蛋白质结合 2,3,4、蛋白质-DNA 结合 5、蛋白质溶解度6 和许多特定酶功能的进化 7。第二个是机器人加速进化8,9,它使用反馈控制器来消除定向进化的两种常见故障模式:灭绝,当环境过于严格时发生,以及缺乏进化,当环境过于宽松时发生。与PANT(噬菌体辅助非连续进化)7,10中完成的噬菌体连续传代不同,机器人加速的"近连续"进化涉及快速移液,将培养物维持在对数中期,使种群能够经历连续的感染和繁殖周期。当这两种技术一起使用时,它们被称为 PRANCE,即噬菌体和机器人辅助的近连续进化8,它能够实现稳健、多路复用和快速的持续进化。PRANCE 已被用于进化聚合酶、tRNA 和氨酰基 tRNA 合成酶,并在这些进化过程中进行反馈控制,以提高其速度和可靠性8。
PRANCE的硬件和软件设置有几个细节,可以在液体处理机器人上使用噬菌体。我们没有使用机器人制造商提供的默认软件,而是使用基于 python 的开源软件包11,它能够实现快速、并发的执行,从而能够将半连续生物反应器保持在中对数阶段。通过定期对甲板上的几个组件进行自我消毒,研究人员的不干涉时间可以延长到几天,这是通过自动控制可以漂白和冲洗这些组件的泵来实现的。噬菌体交叉污染可以通过使用不使用强制配合尖端的液体处理机器人和仔细调整液体处理设置来消除。
研究方案
1. 硬件设置
注意:有关PRANCE系统的硬件组件的概述,请参阅 图 2,有关物理组装的这些组件的照片,请参见 图3 。
- 获取PRANCE系统的主要硬件,包括液体处理仪表、读板器和辅助泵。
注:迄今为止,所有PRANCE系统均已在中型到大型液体处理仪器上实施,这些仪器配备了8通道、可单独寻址的移液臂、单活塞96吸头移液臂、用于移动板的机器人夹持器、用于吸头灭菌的集成洗涤站以及能够测量吸光度和发光的集成读板器。 - 根据液体处理机器人的型号和功能配置加热策略。使用加热板架或加热器介导的机器人气候控制。
- 建立吸头清洗站,以便吸头重复使用。
注意:迄今为止,PRANCE系统一直使用现成的清洗站,尽管原则上,该组件可以很容易地由低成本组件制成。 - 通过设置在37°C下运行的实时生物反应器作为化学恒温器/涡轮抑制器,建立维持在对数期的细菌培养物来源。或者,在附近的冰箱中,在4°C下,在37°C的对数相(OD600 在0.25和0.45之间)中预先生长的至少1L体积的对数期细菌培养物。确保培养物,无论是冷藏的还是温热的,都使用摇床板或搅拌板定期搅拌,以防止沉淀。
- 配置首选泵,以便机器人与必要的软件和驱动程序集成。实施软件,使泵能够输送 10-100 mL 量级的液体。
注意:请参阅此实施中使用的泵 的材料表 和制造商的网站,了解用于操作这些泵的软件以及如何配置它们的文档。本手稿中所示的PRANCE设置中使用的泵的此类软件在以下GitHub存储库中提供开源,https://github.com/dgretton/std-96-pace PRANCE需要至少一个能够泵送三个独立通道的三泵歧管(将细菌输送到细菌储存器,将漂白剂输送到细菌储存器,并将细菌储存器排入废物),每个泵的速度独立校准和控制。过去,人们使用鱼缸泵和水培泵阵列,尽管原则上可以使用任何蟒蛇控制的蠕动泵。基本功能包括使用机器人夹持器将板移入或移出读板器、启动读板器测量以及访问测量值。 - 3D打印PRANCE系统所需的定制甲板组件,至少包括细菌储存器/分配歧管("华夫饼"),如 补充文件1 (https://drive.google.com/file/d/16ELcvfFPzBzNSto0xUrBe-shi23J9Na7/view?usp=share_link)所示。将这些容器固定在甲板上,并使用标准的液体处理机器人软件校准其位置。将储液罐连接到泵阵列。
注意: 有关如何执行校准的详细信息,请参阅机器人制造商的文档,因为它将依赖于机器人。基于树脂的3D打印机是最合适的; 材料表中给出了所用打印机类型的示例;标准透明树脂与默认打印机设置一起使用。 - 为系统配备符合当地生物安全建议的排水管。
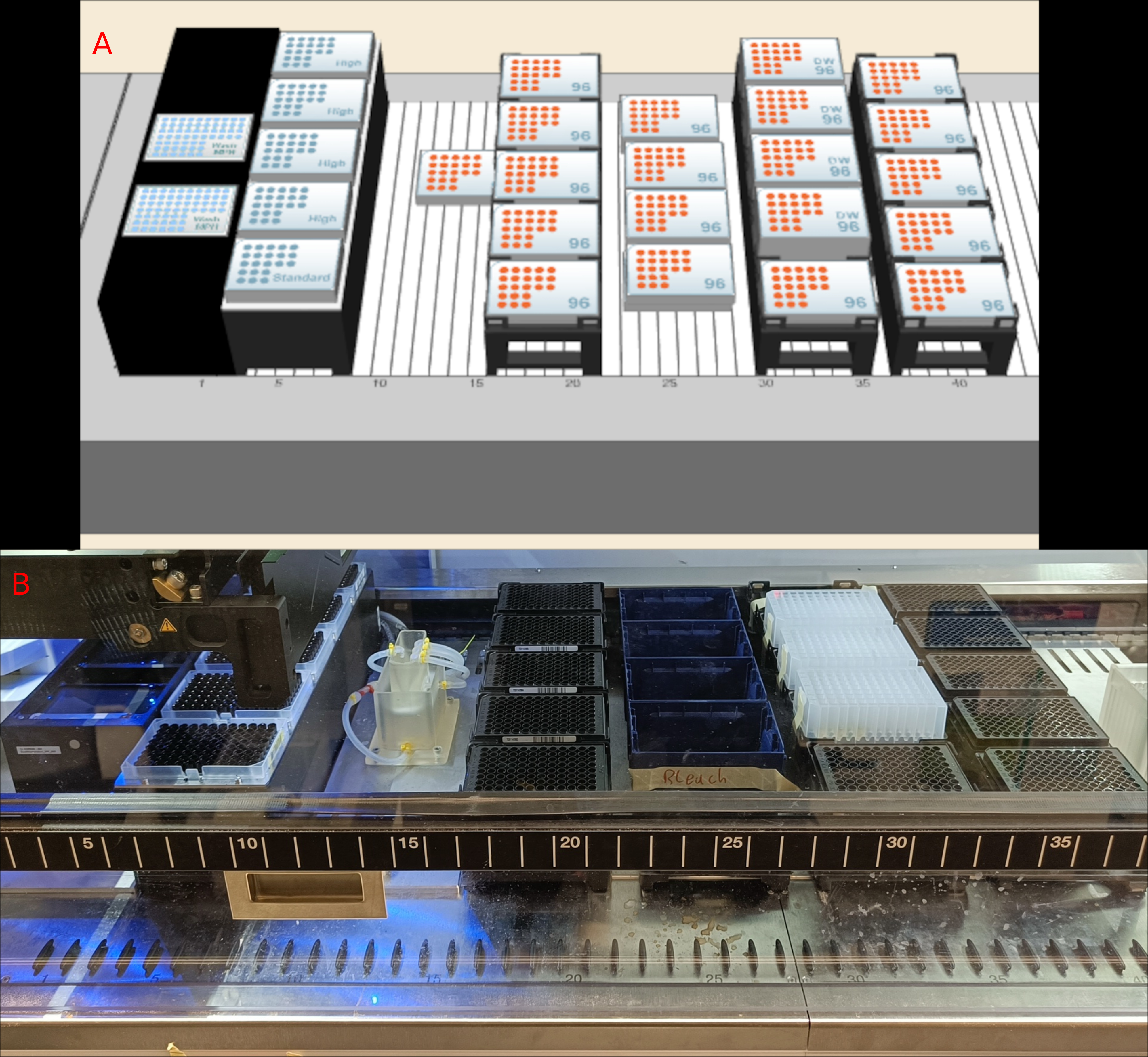
- 将实验室器皿放在液体处理机器人的甲板上,如 图 4 所示。
- 遵循标准安全程序,包括使用标准实验室个人防护设备(即实验室外套、手套和护目镜)。
2. 软件准备
- 使用 python11 安装用于控制液体处理机器人的开源软件,该软件可从开源 PyHamilton 存储库获得。https://github.com/dgretton/pyhamilton
- 修改和校准液体处理机器人软件的实验室布局文件,以准确反映机器人平台上的实验室器皿位置,如图 4 所示。
注意: 根据提供的文档,此处使用的设置使用液体处理机器人制造商提供的软件。 - 在 模拟模式下运行PRANCE机器人方法程序。
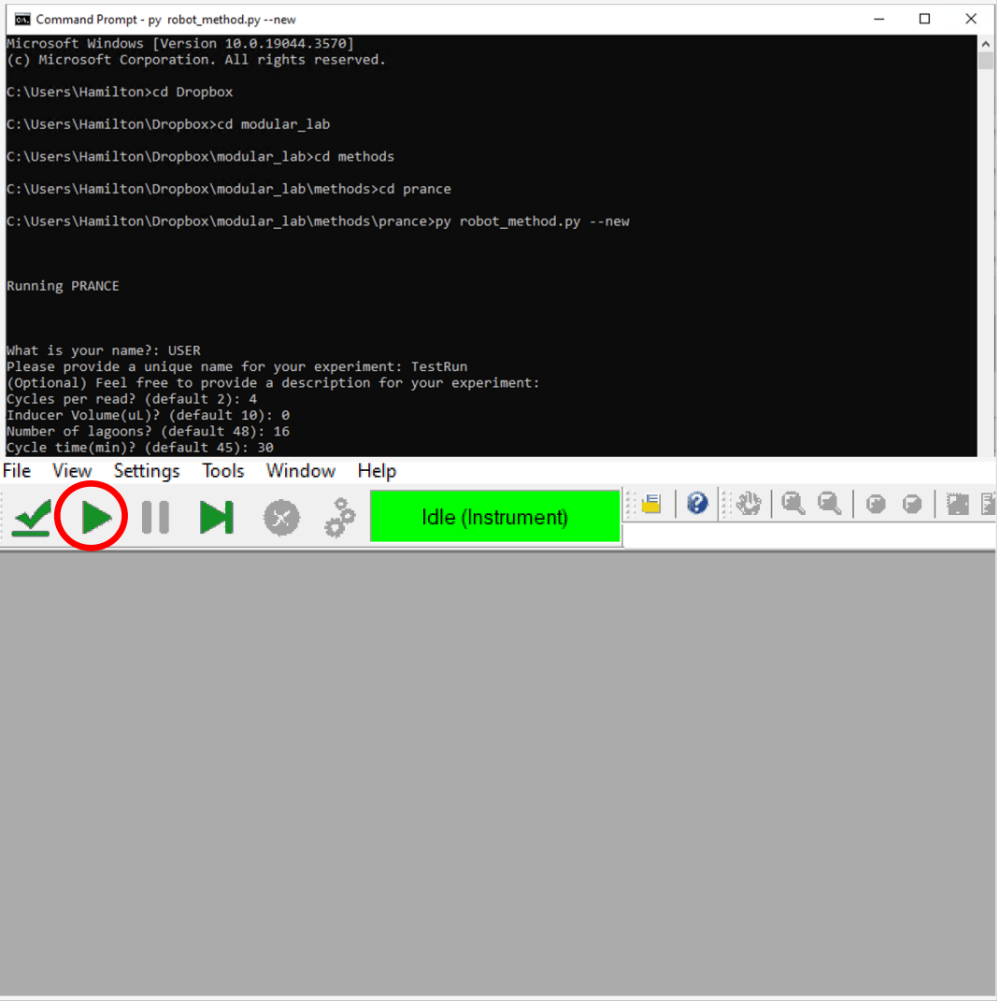
- 使用以下命令(在 Windows 操作系统中)打开命令行,如 图 5 所示。
Windows 键 + R
输入:cmd - 将父目录更改为机器人方法程序的目录。输入如下命令,路径正确,如 图 5 所示。
光盘 c:\Robot_methods_directory\PRANCE - 使用 Python 调用带有模拟模式标志的机器人方法程序,如 图 5 所示。
py robot_method.py --模拟 - 选择 Robot Run Control 窗口左上角的 PLAY 按钮,该按钮将在程序执行时打开(图 5)。
注意:在继续之前,请确保 PRANCE 方法可以在模拟中无错误地运行。很明显,脚本是否能够在模拟模式下运行而不会出错,因为它将在不调用系统错误处理的情况下完成主程序的多个循环,从而终止主程序循环。
- 使用以下命令(在 Windows 操作系统中)打开命令行,如 图 5 所示。
- 在禁用模拟模式的情况下运行PRANCE机器人方法程序。
- 在相应的目录中打开命令行(图 5)。
Windows 键 + R
输入:cmd
光盘 c:\Robot_methods_directory\PRANCE - 使用 Python 调用机器人方法程序,不带标志:
py robot_method.py - 选择机器人运行控制窗口左上角的"播放"按钮,该按钮将在执行程序时打开。
- 确认 PyHamilton 可以控制仪器并使其初始化。
- 在相应的目录中打开命令行(图 5)。
- 建立实时数据同步。
注意:迄今为止,PRANCE系统已使用联网计算机,允许用户通过远程文件共享软件或远程桌面监控日志文件和实时板读取器测量图。 - 关闭自动更新。
3. 运行前准备
- 确保对数期细菌培养源可用于计划运行所需的所有培养物,并且正在积极搅拌以防止沉淀。使用活性化学恒温器/浊度恒温器或生长停滞的冷藏预生长培养物。
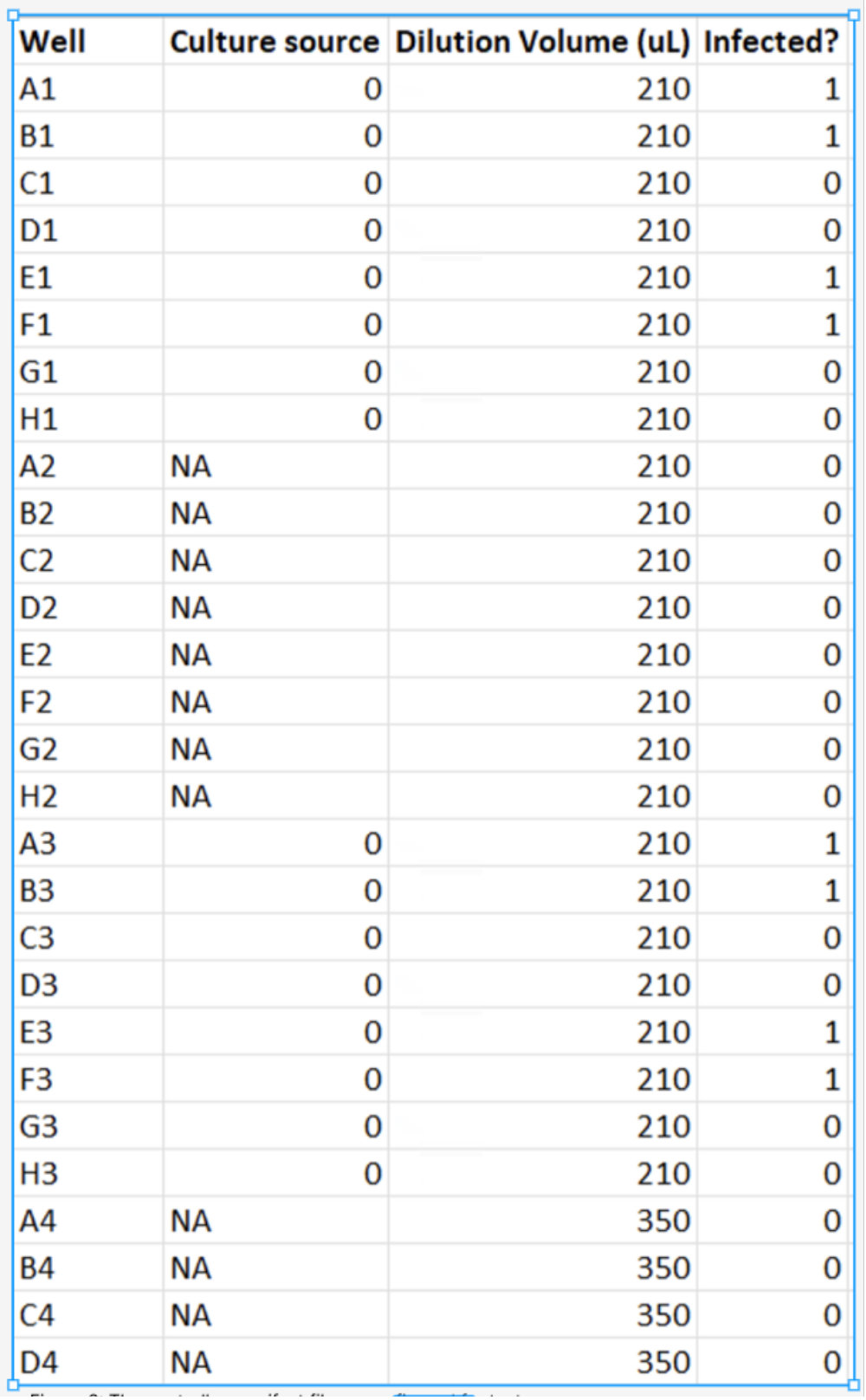
- 更新控制器清单文件,详细说明每个程序周期将哪种细菌培养物泵入 96 孔泻湖的每个孔中。这样可以精确控制有效的泻湖稀释率。如 图 6 所示。
- 使用DilutionCalculator.xlsx电子表格(作为 补充文件 2 提供)计算泻湖的稀释率,如 图 7 所示。
- 将robot_method.py文件更新为预期的泻湖高度。要遵循此协议,请使用 14(以毫米为单位)作为程序中变量fixed_lagoon_height的默认值。这相当于系统上 550 μL 的泻湖体积,但可能因所使用的特定 96 深孔板而异。
- 将干净过滤的移液器吸头放在机器人甲板上的指定位置,并将吸头架粘在吸头支架上,以确保运行过程中的稳定性。
- 将干净的 96 深孔板放在机器人甲板上的指定位置。
- 将干净的 96 孔读板放在机器人甲板上的指定位置。
- 确保读板器托盘未被预先存在的板占用。
- 确保泵已连接到计算机并分配到正确的地址。
- 通过激活泵来清洁泵管路,然后泵送漂白剂,然后泵送水。
- 将泵管路连接到适当的源和输出,密切注意确保正确的管路连接到相关的细菌培养物。
- 装有漂白剂/水的罐/桶,用于细菌储液罐和移液器吸头清洗。
- 确保甲板上的所有部件,尤其是移动元件,都稳定在指定位置。
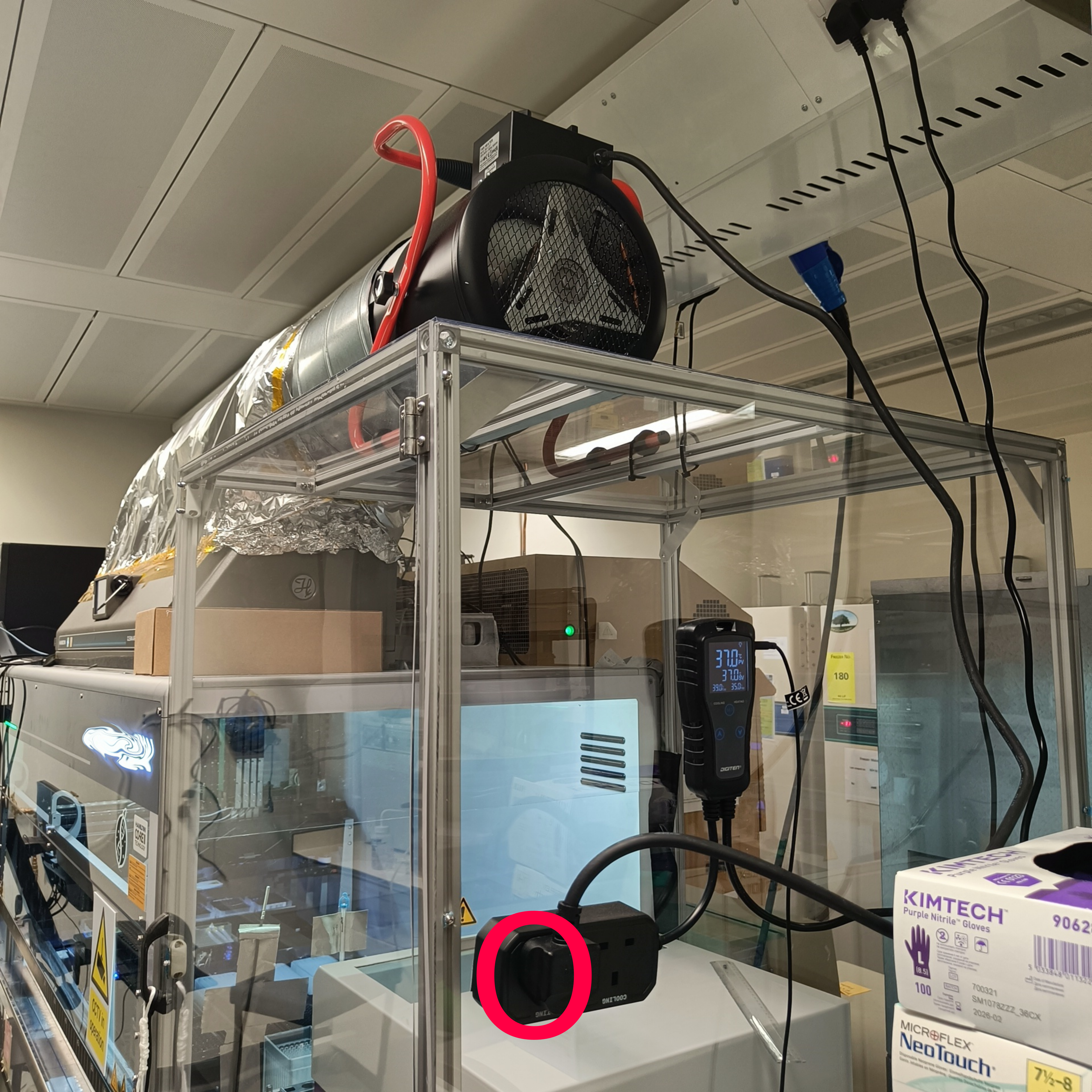
- 根据当地实施激活加热器以达到目标温度(即 37 °C; 图8)。
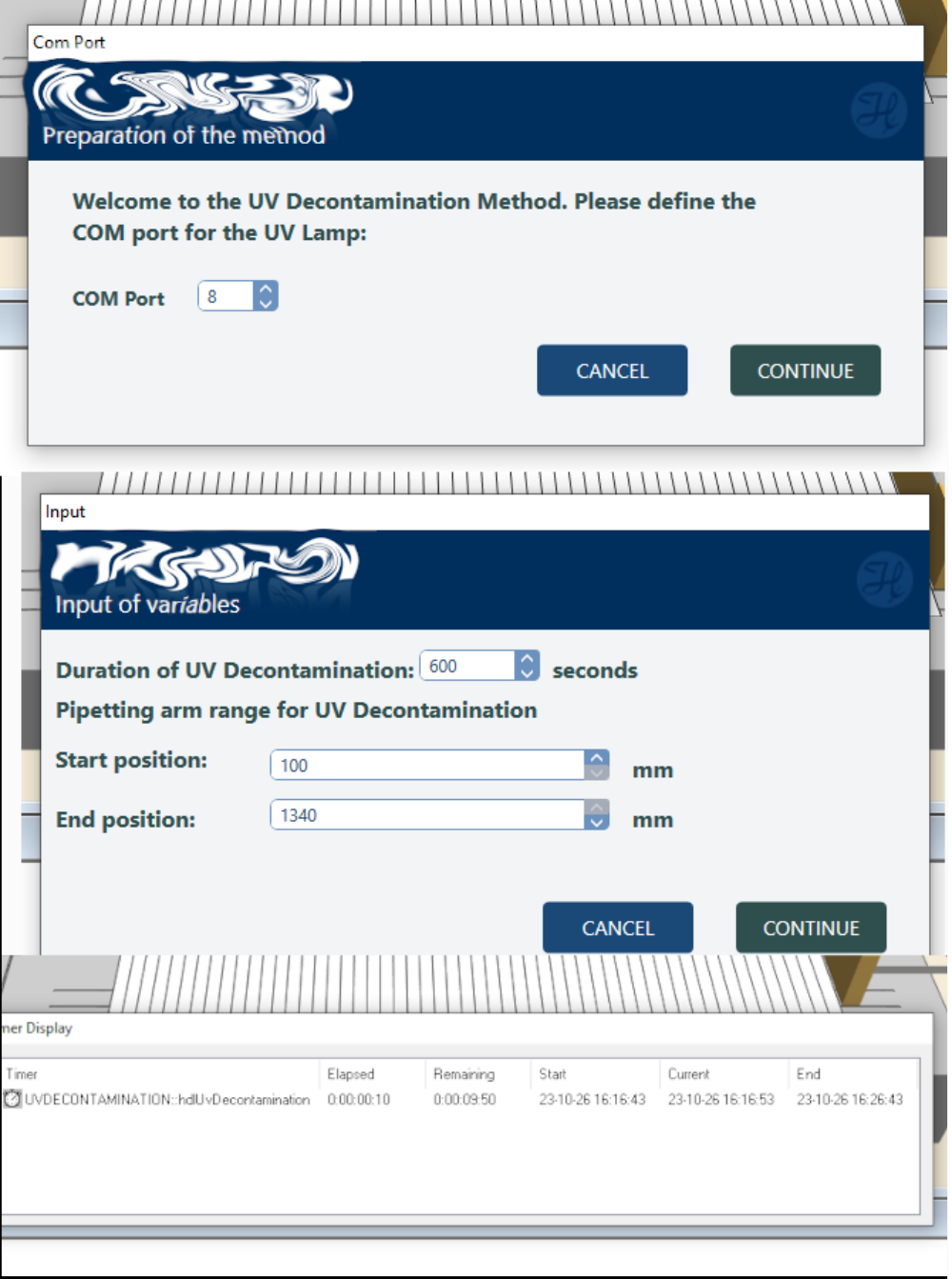
- 运行紫外线杀菌协议文件 10 分钟,以操作制造商提供的液体处理机器人中的内置紫外线杀菌灯(图 9)。
- 选择机器人运行控制窗口左上角的"播放"按钮,该按钮将在执行程序时打开。
- 使用参数化选项运行文件 600 秒。
- 确保机器人运行控制软件已关闭。
注意:如果运行控制软件的任何现有实例正在运行,机器人方法程序将崩溃。
4、软硬件集成
- 进行"水运行",其中PRANCE机器人方法程序在一夜之间运行,用水代替所有培养物和湿试剂。
注意: 此测试可以在室温下运行。- 使用controller_manifest完成如上所述的运行前准备工作,并robot_method设置为1体积/小时的有效泻湖稀释率,如图5和图6所示。
- 将"细菌进入"管线连接到装水容器,以替换对数相细菌进行水流。
注意:可以将食用色素添加到水源中,以跟踪液体在实验过程中的运动。 - 在相应的目录中打开命令行。
- 使用 Python 调用机器人方法程序,并使用新的运行标志 (py robot_method.py --new) 并输入请求的参数,包括 日志文件名 (TestRun)、泻湖孔数 (16)、 循环持续时间 (30)、 每个阅读器板测量的循环数 (4) 和 诱导器体积 (诱导器体积为 0 μL 对于该测试运行,在用阿拉伯糖诱导诱变的进化过程中,该值可能为 10 μL),如 图 5 所示。
- 选择"机器人运行控制"窗口左上角的"播放"按钮,该按钮将在提供参数后执行程序时打开。
注意:PRANCE方法可以使用空泻湖板启动,泻湖的液体体积将在前六个循环中平衡到最终体积。
- 进行"仅细菌运行",其中PRANCE方案仅在目标温度下进行细菌培养过夜,但不使用噬菌体。
- 使用controller_manifest完成如上所述的运行前准备工作,并robot_method设置为1体积/小时的有效泻湖稀释率,如图5和图6所示。确保加热器在目标温度为 37 °C 时打开。
- 将"细菌"线连接到所选的对数相细菌源。
- 在相应的目录中打开命令行。
- 使用 Python 调用带有新运行标志 (py robot_method.py --new) 的机器人方法程序并输入请求的参数,如前面的第 4.1.4 节所述。
- 选择"机器人运行控制"窗口左上角的"播放"按钮,一旦提供了参数,该窗口将在程序执行时打开。
- 进行"感染测试",其中携带进化蛋白质的噬菌体受到挑战,以在需要该蛋白质的细菌上繁殖。
注意:提前决定哪些泻湖将接种噬菌体,哪些泻湖将不接种,从而作为无噬菌体控制泻湖以检测交叉污染。- 如图5和图6所示,使用controller_manifest完成如上所述的运行前准备工作,并robot_method设置为1体积/小时的有效稀释率。确保加热器在目标温度为 37 °C 时打开。
- 将"细菌"线连接到所选的对数相细菌源。
- 在相应的目录中打开命令行。
- 使用 Python 调用带有新运行标志 (py robot_method.py --new) 的机器人方法程序,并输入请求的参数,如前面第 4.1.4 节中所述。
- 选择"机器人运行控制"窗口左上角的"播放"按钮,该按钮将在提供参数后执行程序时打开。
- 在添加噬菌体之前,运行该方法2-3小时以平衡泻湖板中的体积和细菌OD。
- 当程序处于睡眠状态时,在运行周期结束时用 106 pfu/mL 噬菌体接种噬菌体泻湖(例如,通过斑块测定或 qPCR 测定的 108 pfu/mL 的 5.5 μL噬菌体等分试样)接种到 550 μL 泻湖中。
- 运行程序过夜,然后通过斑块测定或qPCR检查泻湖孔中的噬菌体滴度。
结果
感染检测结果
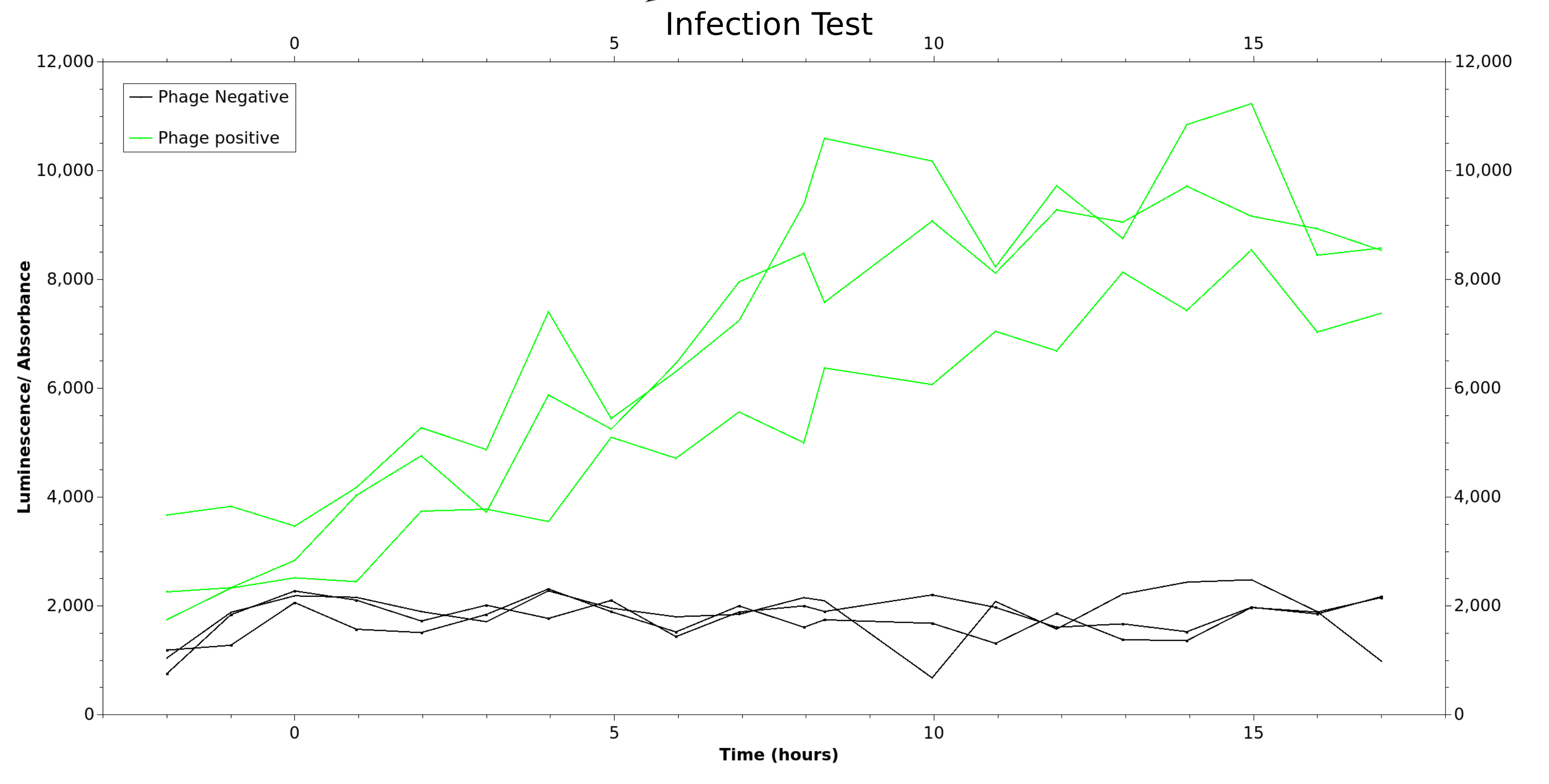
该测试将揭示细菌培养、噬菌体克隆和滴度、设备温度稳定性、液体处理设置和酶标仪集成方面的问题。成功的噬菌体感染测试将揭示接种噬菌体的泻湖中清晰而快速的噬菌体感染,而在无噬菌体泻湖中没有信号。 图10 显示了噬菌体感染试验的一些代表性结果。实验结果也可以与PRANCE论文8的图1d和图1c进行比较,这取决于是否实施了"热PRANCE"(由活细菌涡旋器喂养)或"冷PRANCE"(由冷却的中对数阶段培养物喂养)配置。此测试可能会揭示几个常见问题。细菌培养制备问题通常会导致感染较弱或不存在感染。只有当细菌处于对数期中期和37°C时,它们才能被M13噬菌体最佳感染。 在其他温度和生长阶段,它们表现出较弱的菌毛表达,因此不太容易受到噬菌体感染12。接种低滴度噬菌体或具有骨架突变的噬菌体可导致信号延迟或缺失。该测试将揭示荧光或发光的酶标仪增益设置问题。

图1:PRANCE设备感染测试运行期间运行的遗传回路示意图。 当编码在噬菌体基因组上的 T7 RNA 聚合酶感染 大肠杆菌 宿主时,它被转录并在 T7 启动子的 AP 上结合,这导致 pIII 噬菌体蛋白和 luxAB 蛋白的转录,这反过来又促进噬菌体繁殖和发光的产生。缩写:PRANCE = 噬菌体和机器人辅助的近连续进化;AP = 辅助质粒。 请点击这里查看此图的较大版本.
{kind=link}

图2:PRANCE系统的物理组件示意图。 冰箱储存搅拌培养物,然后通过一系列泵将其移动到机器人甲板上,进入细菌储存库"华夫饼"。液体处理机器人用于使用移液头将细菌培养物从"华夫饼"移动到保温孔以预热至孵育温度,然后移动到主要孵育发生的泻湖。保温井和泻湖都是标准的 2 mL 深孔板。机器人将样品放入一次性读板中,然后将其移动到读板器进行测量。缩写:PRANCE = 噬菌体和机器人辅助的近连续进化。 请点击这里查看此图的较大版本.
{kind=link}

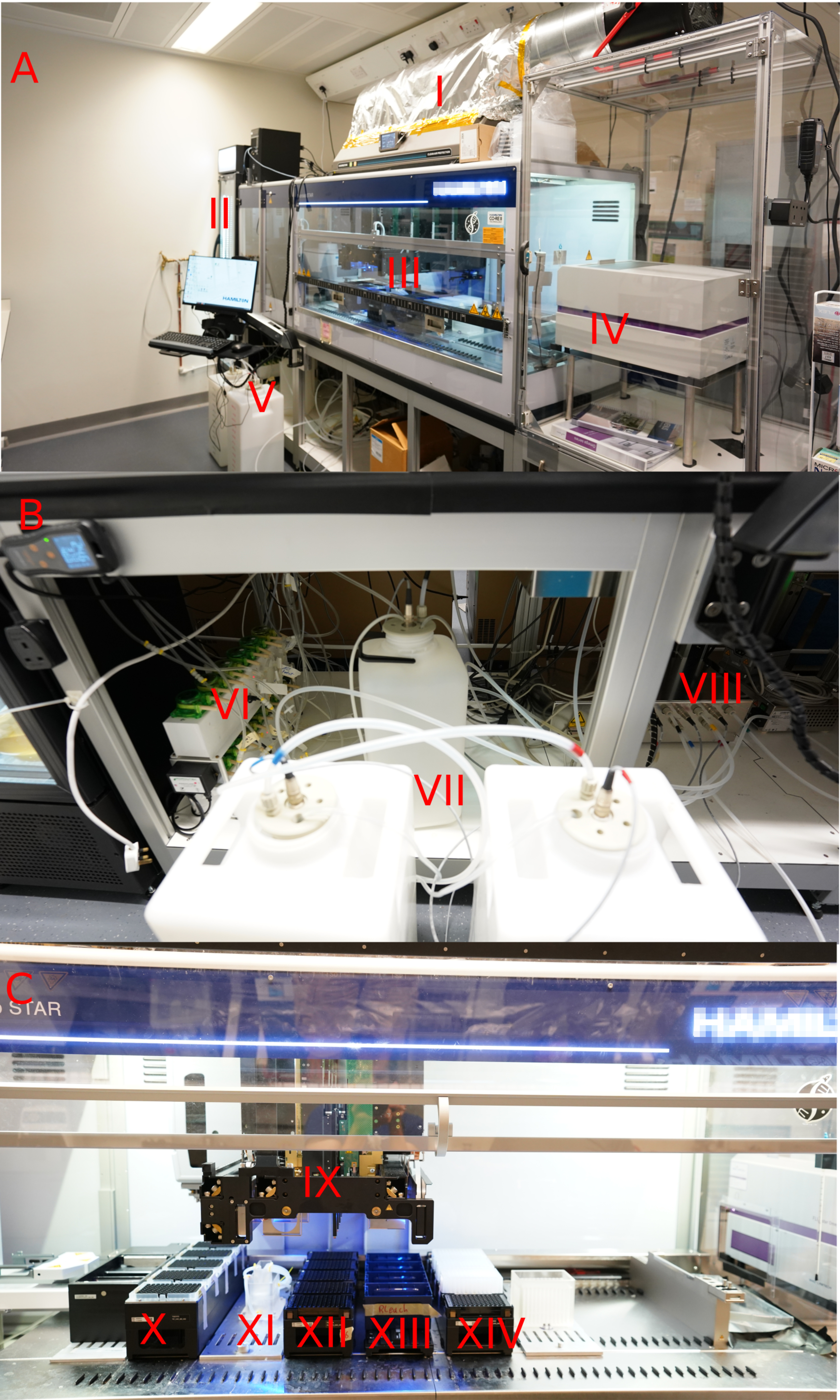
图3:PRANCE机器人设备。 (A) PRANCE设置。(一)HEPA过滤器和外部加热器。(二)培养冰箱。(三)主机器人外壳。 (四) 读板仪。 (五) 水泵和储罐。(B) 机器人外壳。 (六) 主培养泵。 (七) 水、废水、漂白剂罐。 (八) 清洗泵。(C) 机器人外壳。(IX) 机器人移液臂和夹持器。(X) 移液器吸头。(XI) 3D打印组件,允许将培养物分发到机器人上("华夫饼")。(XII) 在读板器中取样的印版。(XIII) 用于清洗吸头的水桶。(XIV) "泻湖":进行进化培养的养殖容器。缩写:PRANCE = 噬菌体和机器人辅助的近连续进化;HEPA = 高效微粒空气。 请点击这里查看此图的较大版本.
{kind=link}

图 4:甲板布局。 (A) 机器人控制软件中甲板布局的 3D 表示。(B) 甲板组件的照片。 请点击这里查看此图的较大版本.
{kind=link}

图 5:带有示例参数(上图)和运行控制软件(下图)的命令行屏幕截图。 播放按钮位于左上角,可以用鼠标单击或用触摸屏启动,具体取决于本地实现。 请点击这里查看此图的较大版本.
{kind=link}

图 6:为测试运行配置的控制器清单文件。 含有培养物 #0 的泻湖将位于 96 深孔板的第 1 列和第 3 列中。其余列将为空。96 深孔板的 A、B、D 和 E 行在右列标记为噬菌体感染 (1),其他行 (0) 是无噬菌体对照。控制器清单的这个实例将导致程序在每个循环中用 210 μL 培养物稀释泻湖。 请点击这里查看此图的较大版本.
{kind=link}

图 7:使用 DilutionCalculator 电子表格计算有效泻湖稀释率。请参阅 DilutionCalculator 电子表格的补充文件 2。如图所示,每 30 分钟循环用 210 μL 新鲜培养物稀释 550 μL 泻湖,每四个循环采集 150 μL 样品用于读板测量,对应于 1.0 泻湖体积/h 的有效稀释率(每 1 小时后,一小时开始时将保留 50% 的原始泻湖液体) 请点击这里查看此内容的较大版本数字。
{kind=link}

图 8:机器人加热器系统。 加热器通过插入电源来激活,如红色圆圈所示。 请点击这里查看此图的较大版本.
{kind=link}

图 9:紫外线去污协议的设置。 请点击这里查看此图的较大版本.
{kind=link}

图10:在PRANCE系统上运行的感染测试的测量值。 在运行过程中取样并测量发光度和吸光度。对于每个泻湖,发光测量值除以相应的吸光度测量值,并绘制为时间的函数。被噬菌体感染的泻湖被涂成绿色,而未感染的对照泻湖被涂成黑色。缩写:PRANCE = 噬菌体和机器人辅助的近连续进化。 请点击这里查看此图的较大版本.
{kind=link}
补充文件1:用于3D打印PRANCE系统所需的定制甲板组件的STL文件,至少包括细菌储存器/分配歧管("华夫饼")。请点击此处下载此文件。
补充文件 2:稀释计算器电子表格。请点击此处下载此文件。
讨论
尽管努力实现设备标准化,但实际上,由于设备供应、硬件和软件版本控制的变化,每个 PRANCE 设置都会有所不同。因此,每个PRANCE设置都表现出独特的设置挑战,需要全面了解每个组件的用途,以便进行有效的模块化故障排除。
该方法描述了用于设置和测试已建立的PRANCE系统的分步协议。我们首先关注硬件和软件的关键要素,然后详细说明准备和执行一系列测试运行的基本步骤,这些步骤确定系统已准备好进行 PRANCE。
硬件的一个基本特征是优化,以降低使用噬菌体的多重实验期间样品交叉污染的风险。建议使用具有机器人吸头技术的专用过滤吸头,该技术与吸头重复使用兼容,并且被认为通过避免强制配合吸头来最大限度地减少吸头弹出过程中产生的气溶胶。根据该协议,可靠的吸头清洗允许吸头重复使用,但必须将其充分性作为每个系统感染测试的一部分进行验证。自我灭菌还取决于系统持续供应水和漂白剂。这些储存在水箱/桶中,如果耗尽将导致自我消毒受损和快速交叉污染。可以在程序运行之前和之后拍摄水箱/水桶的照片,以基准测试洗涤设备在特定泵设置下消耗水和漂白剂的速度。
该系统的另一个关键要素是维持细菌生长阶段和温度。使用 S2060 大肠杆菌 菌株 (Addgene: #105064) 进行 PRANCE 实验。这是一种 K12 衍生的含 F 质粒的菌株,经过优化可减少生物膜7。此外,该菌株中的 F 质粒已通过添加用于质粒维持的四环素耐药盒、 luxCDE 和 luxR 进行编辑以补充 luxAB 介导的发光监测,以及噬菌体休克启动子下的 lacZ 以允许斑块的比色可视化。F-质粒编码的F-菌毛是M13噬菌体感染所必需的。因此,PACE中使用的细菌必须在37°C和中期对数期培养,此时F-pilus12 表达并且M13噬菌体感染,繁殖和进化是可能的。对于静态温度调节,可以使用现成的加热板架。另一种方法是简单地使用廉价的加热器加热进入HEPA过滤器的空气,但不建议这样做,因为它可能会导致硬件加速磨损。此外,使用时,这会加速甲板上辅助流体的蒸发,例如漂白剂/水桶和诱导剂。
软件包的校准对于正常的系统功能也是必不可少的。软件甲板布局与实际机器人甲板之间的差异是运行过程中系统故障的最常见原因。定期校准供应细菌培养、漂白和排水系统的辅助泵至关重要,因为蠕动泵的使用会导致管道磨损和流体体积变化。
水运行测试将快速揭示许多常见的设置问题,包括不正确的液体处理设置、流体泄漏/连接错误以及软件不稳定。成功的水运行不会出现意外的液体泄漏,并在一夜之间稳定运行而不会出现错误。在水运行过程中可能会出现许多常见问题,例如无法执行某些液体处理步骤、移液器滴落以及方案在运行过程中停止。如果无法执行某些液体处理步骤,请确认已安装所有液体类别。这些列出了适当的粘度和移液速度,并在制造商提供的机器人控制软件中进行了调整。如果移液器滴落,机器人移液臂设置正确,以实现清洁移液并消除噬菌体交叉污染,这一点很重要。成功的自动移液除了需要正确的液体类别外,还需要所有实验室器皿的正确台面布局高度,以及PRANCE机器人方法程序中指定的适当移液高度偏移。这些高度偏移可能需要直接调整。如果协议在运行过程中停止,这通常是由一系列错误生成的,这些错误表明卡组布局文件可能与实际的卡组配置不匹配。
仅细菌运行测试将揭示酶标仪设置和实时数据可视化的问题、漂白剂浓度过高或冲洗不足的问题以及温度稳定性。成功的纯细菌运行将在前三个周期中表现出泻湖吸光度的平衡,然后在运行期间表现出稳定的吸光度。此外,它还可能揭示几个常见问题。这是绘制读板仪生成的数据的第一步。酶标仪数据库中的数据可能无法正确保存或绘制。如果细菌的吸光度无法平衡,这可能表明漂白剂浓度过高。过量的漂白剂或洗涤不足会对整个实验进行消毒,而不仅仅是对实验室器皿进行消毒。如果怀疑有这种情况,可以使用漂白剂检测条来测试泻湖。可以用温度计枪检查培养物温度的稳定性。
成功的感染测试表明系统已准备好运行 PRANCE。可以通过接种含有细菌培养物的泻湖子集来进行感染测试。当这些细菌被缺乏pIII(ΔgIII)基因的适当噬菌体感染时,这些细菌将表达pIII,从而允许噬菌体繁殖。一种可能的测试组合是将 S2060 细菌与任何 ΔgIII 噬菌体一起使用在噬菌体休克启动子下用表达 pIII 的质粒转化。我们建议使用携带野生型 T7 RNA 聚合酶的 ΔgIII 噬菌体,其中 S2060 细菌用辅助质粒转化,其中 pIII 和 luxAB 由 T7 启动子(质粒 pJC173b13)驱动,如 图 1 所示。这也允许在测试运行期间由酶标仪介导的感染监测。感染测试成功和缺乏交叉污染的明确证据将来自测试和对照泻湖的噬菌体滴度。在使用荧光素酶报告基因的情况下,仅在测试孔中发光的增加( 如图3所示)也是噬菌体感染和繁殖成功的指标。噬菌体滴度定量的金标准是噬菌斑测定7。还有一种通过qPCR7 定量M13的方案可能更快,尽管这不能区分感染性和非感染性噬菌体颗粒,因此可能会高估滴度。
主程序引用一个清单文件,这是一个纯文本数据库文件,它规定了每个繁殖培养物的每个循环的稀释体积以及任意数量的潜在细菌培养原料的选择,这些原料的选择严格性可能不同。以这种方式,清单文件定义了 PRANCE 运行的许多参数。需要注意的是,操作员或系统可以在运行过程中编辑此文件,这意味着可以进行手动或自动反馈控制。
功能齐全的PRANCE装置的效用在于它能够在仔细监测和控制的环境中快速进化大量种群。基于板的形式将PRANCE与其他技术区分开来,例如使用较小的现成的基于涡轮涛力的系统14,15。基于板的设置不仅有助于与其他机器人处理步骤轻松集成,而且还与其他实验室仪器(如离心机)兼容。此外,跨多个实例同时进行加速进化的能力为实验引入了额外的维度,增强了实现多样化和稳健结果的前景。PRANCE中集成的精细控制和反馈系统进一步增强了实验的可预测性和可靠性,标志着定向进化技术领域的重大进步。然而,这种技术在它可以进行的平行实验数量上是有限的。根据配置的不同,PRANCE设置通常受到机器人移液速度或可用甲板空间的限制。
用于PRANCE的相同硬件和软件也可以应用于不涉及噬菌体的进化方法。正如多涡轮机方法11所证明的那样,该仪器可以专门用于细菌,从而实现全基因组适应性进化实验。这种适应性拓宽了该仪器的范围,为机器人加速进化的新形式铺平了道路。
披露声明
作者没有要披露的冲突。
致谢
我们感谢 Emma Chory 和 Kevin Esvelt 在硬件和软件设置方面的帮助和建议。Samir Aoudjane、Osaid Ather 和 Erika DeBenedictis 得到了 Steel Perlot 早期调查员补助金的支持。这项工作得到了弗朗西斯·克里克研究所的支持,该研究所的核心资金来自英国癌症研究中心(CC2239),英国医学研究委员会(CC2239)和惠康信托基金会(CC2239)。
材料
| Name | Company | Catalog Number | Comments |
| 3D printed bacterial reservoir "waffle" | - | - | https://drive.google.com/file/d/16ELcvfFPzBzNSto0xUrBe-shi23J9Na7/view; For Robot deck |
| 3D printer | FormLabs | Form 3B+ | 3D printer components |
| 3D printer resin (clear) | FormLabs | RS-F2-GPCL-04 | consumable for 3D printer |
| 8-1,000 µL head | Hamilton | 10140943 | For Liquid handling robot |
| 96-1,000 µL pipetting head | Hamilton | 10120001 | For Liquid handling robot |
| Black polystyrene plate reader microplates | Millipore Sigma | CLS3603 | For Robot deck |
| BMG Labtech Spectrostar FLuorstar Omega | BMG Labtech | 10086700 | For Liquid handling robot |
| Cleaning solution | Fluorochem Limited | F545154-1L | used to clean the liquid handling parts of the robot |
| Deep Well plates | Appleton Woods | ACP006 | these are used to contain evolving bacteria on the deck of the robot |
| encolsure heater | Stego | 13060.0-01 | heats inside robot enclosure |
| Hamilton STAR | Hamilton | 870101 | For Liquid handling robot |
| Heater | Erbauer | BGP2108-25 | For Liquid handling robot |
| HIG Bionex centrifuge | Hamilton | 10086700 | For Liquid handling robot |
| iSWAP plate gripper | Hamilton | 190220 | For Liquid handling robot |
| laboratory tubing | Merck | Z280356 | to construct liquid handling manifold |
| luer to barb connector | AIEX | B13193/B13246 | for connectorizing tubing |
| Magnetic stir plate | Camlab | SKU - 1189930 | For Auxiliary Fridge |
| Molcular pipetting arm | Hamilton | 173051 | For Liquid handling robot |
| Omega | BMG labtech | 5.7 | plate reader control software |
| One way Check Valves | Masterflex | MFLX30505-91 | to one way sections of liquid handling manifold |
| pyhamilton | MIT/Open source | https://github.com/dgretton/std-96-pace%20PRANCE | open source python robot control software |
| pymodbus | opensource | 3.5.2 | python pump software interface |
| Refrigetator | Tefcold | FSC175H | allows cooled bacteria to be used instead of turbidostat |
| S2060 Bacterial strain | Addgene | Addgene: #105064 | E. coli |
| temperature controller | Digiten | DTC102UK | Used to control heaters thermostatically |
| Thermostat switch controller | WILLHI | WH1436A | WILLHI WH1436A 10 A Temperature Controller 110 V Digital Thermostat Switch Sous Vide Controller NTC 10K Sensor Improved Version; for Liquid handling robot |
| Venus | Hamilton | 4.6 | proprietary robot control software |
| Wash Station for MPH 96/384 | Hamilton | 190248 | For Liquid handling robot |
| Suggested pump manufacturers | |||
| Company | Catalog number | Notes | Documentation |
| Agrowtek | AD6i Hexa Pump | https://www.agrowtek.com/doc/im/IM_ADi.pdf | |
| Amazon | INTLLAB 12V DC | ||
| Cole-Parmer | EW-07522-3 | Masterflex L/S Digital Drive, 100 RPM, 115/230 VAC | https://pim-resources.coleparmer.com/instruction-manual/a-1299-1127b-en.pdf |
| Cole-Parmer | EW-07554-80 | Masterflex L/S Economy variable-speed drive, 7 to 200 rpm, 115 VAC | https://pim-resources.coleparmer.com/instruction-manual/a-1299-1127b-en.pdf |
参考文献
- Esvelt, K. M., Carlson, J. C., Liu, D. R. A system for the continuous directed evolution of biomolecules. Nature. 472, 499-503 (2011).
- Pu, J., Zinkus-Boltz, J., Dickinson, B. C. Evolution of a split RNA polymerase as a versatile biosensor platform. Nat Chem Biol. 13 (4), 432-438 (2017).
- Pu, J., Disare, M., Dickinson, B. C. Evolution of C-terminal modification tolerance in full-length and split T7 RNA polymerase biosensors. Chembiochem. 20 (12), 1547-1553 (2019).
- Xie, V. C., Styles, M. J., Dickinson, B. C. Methods for the directed evolution of biomolecular interactions. Trends Biochem Sci. 47 (5), 403-416 (2022).
- Popa, S. C., Inamoto, I., Thuronyi, B. W., Shin, J. A. Phage-assisted continuous evolution (PACE): A guide focused on evolving protein-DNA interactions. ACS Omega. 5 (42), 26957-26966 (2020).
- Wang, T., Badran, A. H., Huang, T. P., Liu, D. R. Continuous directed evolution of proteins with improved soluble expression. Nat Chem Biol. 14 (10), 972-980 (2018).
- Miller, S. M., Wang, T., Liu, D. R. Phage-assisted continuous and non-continuous evolution. Nat Protoc. 15 (12), 4101-4127 (2020).
- DeBenedictis, E. A., et al. Systematic molecular evolution enables robust biomolecule discovery. Nat Methods. 19 (1), 55-64 (2022).
- Zhong, Z., et al. Automated continuous evolution of proteins in vivo. ACS Synth Biol. 9 (6), 1270-1276 (2020).
- Roth, T. B., Woolston, B. M., Stephanopoulos, G., Liu, D. R. Phage-assisted evolution of Bacillus methanolicus methanol dehydrogenase 2. ACS Synth Biol. 8 (4), 796-806 (2019).
- Chory, E. J., Gretton, D. W., DeBenedictis, E. A. Enabling high-throughput biology with flexible open-source automation. Mol Syst Biol. 17 (3), 9942 (2021).
- Novotny, C. P., Lavin, K. Some effects of temperature on the growth of F pili. J Bacteriol. 107 (3), 671-682 (1971).
- Carlson, J. C., Badran, A. H., Guggiana-Nilo, D. A., Liu, D. R. Negative selection and stringency modulation in phage-assisted continuous evolution. Nat Chem Biol. 10 (3), 216-222 (2014).
- Steel, H., Habgood, R., Kelly, C., Papachristodoulou, A. In situ characterization and manipulation of biological systems with Chi.Bio. PLOS Biology. 18 (7), e3000794 (2020).
- Wong, B. G., Mancuso, C. P., Kiriakov, S., Bashor, C. J., Khalil, A. S. Precise, automated control of conditions for high-throughput growth of yeast and bacteria with eVOLVER. Nat Biotechnol. 36 (7), 614-623 (2018).
转载和许可
请求许可使用此 JoVE 文章的文本或图形
请求许可探索更多文章
This article has been published
Video Coming Soon
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。