
Method Article
Una guía práctica para la evolución casi continua asistida por fagos y robótica
En este artículo
Resumen
La evolución casi continua asistida por fagos y robótica (PRANCE) es una técnica para la evolución rápida y robusta de proteínas. La robótica permite la paralelización de experimentos, la monitorización en tiempo real y el control de la retroalimentación.
Resumen
Las técnicas de evolución acelerada por la robótica mejoran la fiabilidad y la velocidad de la evolución mediante el control de retroalimentación, lo que mejora los resultados de los experimentos de evolución de proteínas y organismos. En este artículo, presentamos una guía para configurar el hardware y el software necesarios para implementar la evolución casi continua asistida por fagos y robótica (PRANCE). PRANCE combina la evolución molecular rápida basada en fagos con la capacidad de ejecutar simultáneamente cientos de experimentos de evolución independientes controlados por retroalimentación. Este documento describirá los requisitos de hardware y la configuración de PRANCE, incluido un instrumento de manejo de líquidos, un lector de placas, bombas auxiliares, calentadores y contenedores impresos en 3D. Describimos cómo configurar el robot de manejo de líquidos para que sea compatible con el software de código abierto basado en Python. Finalmente, proporcionamos sugerencias para los dos primeros experimentos que se pueden llevar a cabo con un sistema PRANCE de nueva construcción que ejercita sus capacidades y valida que el sistema está listo para llevar a cabo la evolución multiplexada. Esta guía está destinada a servir como un manual para navegar por la considerable configuración de equipos asociada con la realización de la evolución acelerada por la robótica.
Introducción
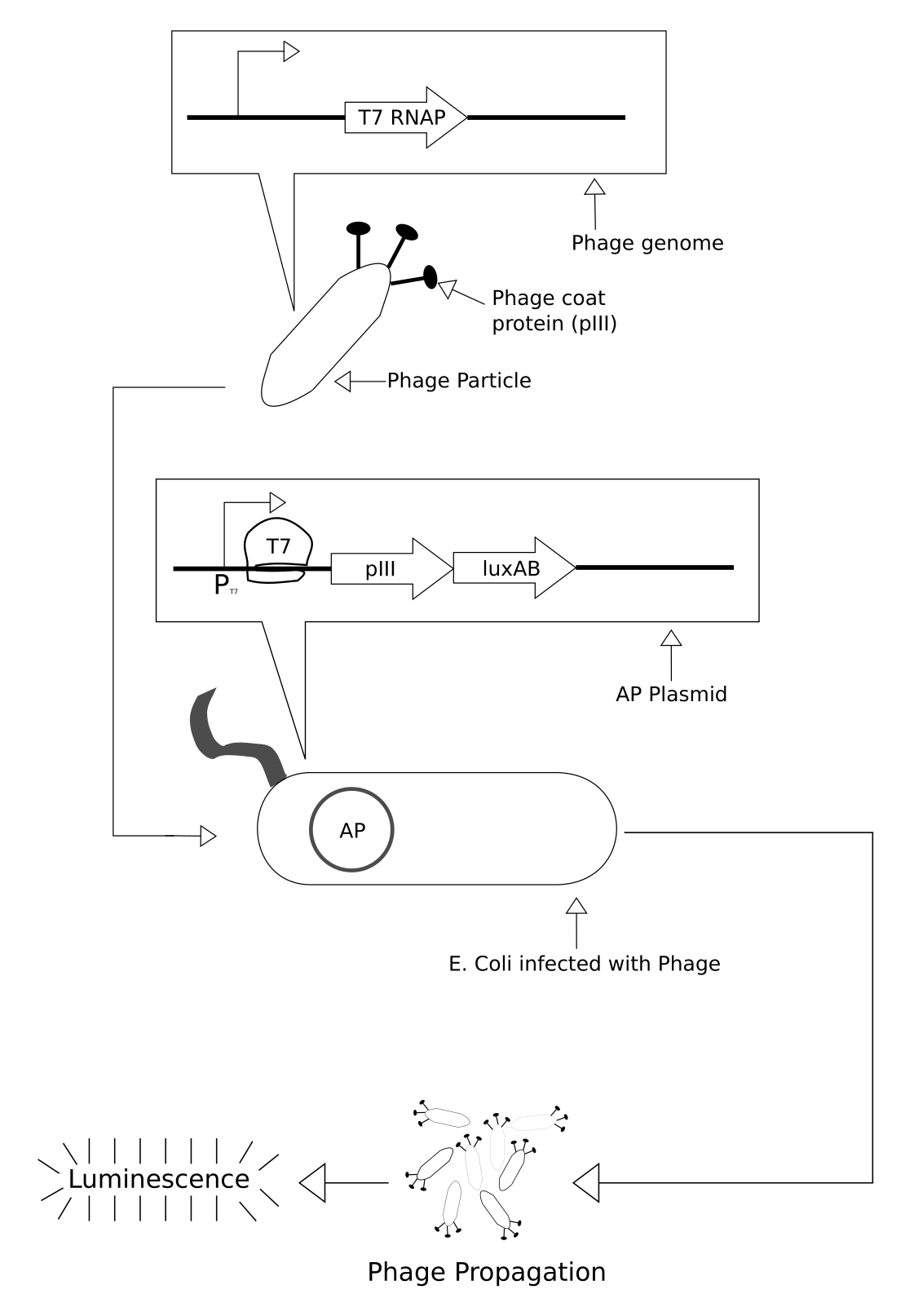
PRANCE es una combinación de dos poderosas técnicas de evolución dirigida. La primera es PACE1, una técnica molecular que acopla rondas de diversificación y selección de genes al ciclo de vida rápido del bacteriófago M13, lo que permite que se produzcan rondas rápidas de evolución de forma continua en el cultivo de fagos líquidos. Esta selección está impulsada por el uso de un circuito genético codificado por plásmidos que acopla la función de la proteína en evolución a la expresión de pIII, la proteína de la capa de la cola de M13, que es necesaria para la propagación de fagos, esto se ilustra en la Figura 1. A nivel experimental, la dilución continua del cultivo líquido de fagos permite una selección continua. Por lo tanto, la rigurosidad de la selección puede modularse tanto a nivel del circuito génico como a nivel experimental mediante el control de la velocidad de dilución del cultivo de fagos. Por lo tanto, PACE se puede aplicar a cualquier desafío de ingeniería de biomoléculas para el que exista un sensor molecular que pueda detectar la actividad deseada en la bacteria E. coli para inducir la expresión de pIII. Las aplicaciones incluyen la evolución de la unión proteína-proteína 2,3,4, la unión proteína-ADN5, la solubilidad proteica6 y numerosas funciones enzimáticas específicas7. En segundo lugar está la Evolución 8,9 acelerada por la robótica, que utiliza un controlador de retroalimentación para eliminar dos modos de falla comunes de la evolución dirigida: la extinción, que ocurre cuando el entorno es demasiado estricto, y la falta de evolución, que ocurre cuando el entorno es demasiado indulgente. A diferencia del paso en serie de fagos que se realiza en PANCE (Phage-assisted Non-continuous Evolution)7,10, la evolución "casi continua" acelerada por la robótica implica un pipeteo rápido que mantiene los cultivos en la fase media de registro, lo que permite a las poblaciones experimentar ciclos continuos de infección y propagación. Cuando estas dos tecnologías se utilizan juntas, se denominan PRANCE, por Phage and Robotics-assisted Near-continuous Evolution8, que permite una evolución continua robusta, multiplexada y rápida. PRANCE se ha utilizado para evolucionar polimerasas, ARNt y amino-acil ARNt sintetasas y para realizar un control de retroalimentación durante esas evoluciones para mejorar su velocidad y confiabilidad8.
Hay varios detalles de la configuración de hardware y software de PRANCE que permiten el uso de bacteriófagos en un robot de manipulación de líquidos. En lugar de utilizar el software predeterminado proporcionado por el fabricante del robot, utilizamos un paquete de software de código abierto basado en python11, que permite una ejecución rápida y concurrente y, por lo tanto, la capacidad de mantener los biorreactores semicontinuos en la fase intermedia de registro. El tiempo de intervención del investigador puede extenderse a varios días haciendo que varios componentes en cubierta se autoesterilizen de forma rutinaria, y esto se logra con el control automático de las bombas que pueden blanquear y enjuagar estos componentes. La contaminación cruzada de fagos se puede eliminar mediante el uso de un robot de manipulación de líquidos que no utilice puntas de ajuste forzado y un ajuste cuidadoso de la configuración de manipulación de líquidos.
Protocolo
1. Configuración del hardware
NOTA: Consulte la Figura 2 para obtener una descripción general de los componentes de hardware de un sistema PRANCE y la Figura 3 para ver fotos de estos componentes ensamblados físicamente.
- Obtenga el hardware principal para el sistema PRANCE, incluido un instrumento de manejo de líquidos, un lector de placas y bombas auxiliares.
NOTA: Todos los sistemas PRANCE hasta la fecha se han implementado en instrumentos de manejo de líquidos medianos a grandes equipados con brazos de pipeteo de 8 canales direccionables individualmente, un brazo de pipeteo de un solo pistón de 96 puntas, una pinza robótica para placas móviles, una estación de lavado integrada para la esterilización de puntas y un lector de placas integrado capaz de realizar mediciones de absorbancia y luminiscencia. - Configure las estrategias de calentamiento en función del modelo y las características del robot de manipulación de líquidos. Utilice un portaplacas calefactadas o un robot climatizador mediado por calefactor.
- Establezca una estación de lavado de puntas para permitir la reutilización de las puntas.
NOTA: Hasta la fecha, los sistemas PRANCE han utilizado estaciones de lavado estándar, aunque, en principio, este componente podría construirse fácilmente a partir de componentes de bajo costo. - Establecer una fuente de cultivo bacteriano mantenida en fase logarítmica mediante la instalación de un biorreactor en tiempo real que funcione a 37 °C como quimiostato/turbidostato. Alternativamente, detener un cultivo bacteriano en fase logarítmica de al menos 1 L de volumen precultivado a 37 °C en fase logarítmica (DO600 entre 0,25 y 0,45) a 4 °C en un refrigerador cercano. Asegúrese de que el cultivo, ya sea frío o tibio, se agite regularmente utilizando una placa agitadora o una placa de agitación para evitar la sedimentación.
- Configure las bombas preferidas para la integración robótica con el software y los controladores necesarios. Implemente el software para permitir que las bombas suministren cantidades definidas de líquido del orden de 10-100 ml.
NOTA: Consulte la Tabla de materiales para las bombas utilizadas en esta implementación y el sitio web del fabricante para conocer el software utilizado para operar estas bombas y la documentación sobre cómo configurarlas. Dicho software para las bombas utilizadas en la configuración de PRANCE ilustrada en este manuscrito se proporciona de código abierto en el siguiente repositorio de GitHub https://github.com/dgretton/std-96-pace PRANCE requiere al menos un colector de tres bombas capaz de bombear tres canales separados (entregar bacterias al reservorio bacteriano, entregar lejía al reservorio bacteriano y drenar el reservorio bacteriano a los desechos), con la velocidad de cada uno calibrada y controlada de forma independiente. En el pasado, la gente ha utilizado bombas de pecera y matrices de bombas hidropónicas, aunque, en principio, se puede utilizar cualquier bomba peristáltica controlable por pitón. Las funciones esenciales incluyen la capacidad de utilizar una pinza robótica para transferir placas dentro o fuera del lector, iniciar una medición del lector de placas y acceder a las mediciones. - Imprima en 3D los componentes de la cubierta personalizados necesarios para el sistema PRANCE, incluidos, como mínimo, el reservorio/colector de distribución bacteriana ("waffle"), como se encuentra en el Archivo Suplementario 1 (https://drive.google.com/file/d/16ELcvfFPzBzNSto0xUrBe-shi23J9Na7/view?usp=share_link). Asegure estos contenedores en la plataforma y calibre sus posiciones utilizando el software estándar del robot de manipulación de líquidos. Conecte el depósito al conjunto de bombas.
NOTA: Consulte la documentación del fabricante del robot para obtener detalles sobre cómo realizar la calibración, ya que dependerá del robot. Las impresoras 3D a base de resina son las más apropiadas; un ejemplo del tipo de impresora utilizado se da en la Tabla de Materiales; Se utilizó la resina transparente estándar con la configuración predeterminada de la impresora. - Equipe el sistema con un desagüe compatible con las recomendaciones locales de bioseguridad.
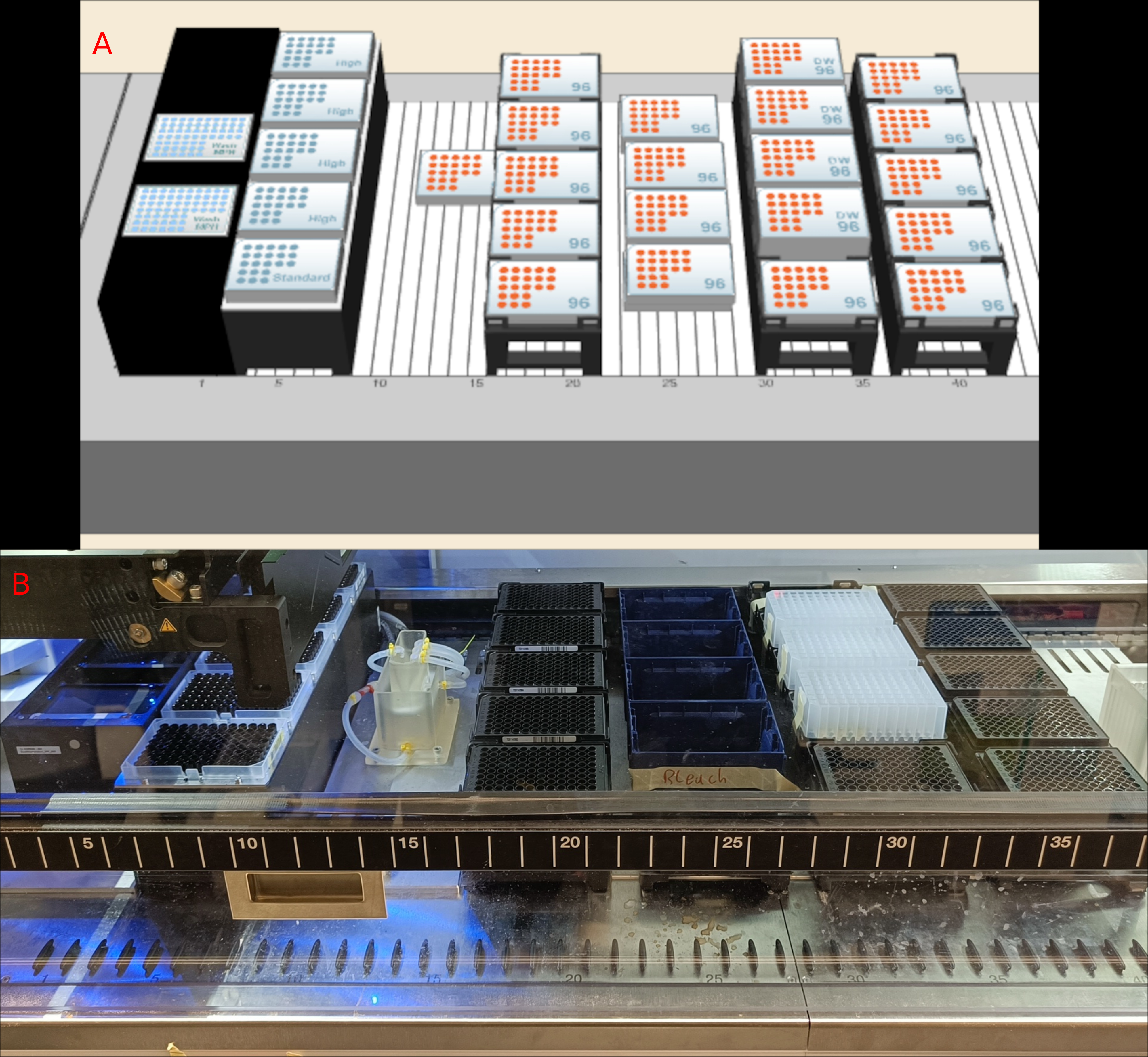
- Coloque el material de laboratorio en la plataforma del robot de manejo de líquidos como se ejemplifica en la Figura 4.
- Siga los procedimientos de seguridad estándar, incluido el uso de equipo de protección personal de laboratorio estándar (es decir, bata de laboratorio, guantes y protección para los ojos).
2. Preparación del software
- Instale el software de código abierto utilizado para controlar los robots de manipulación de líquidos con python11, disponible en el repositorio de código abierto PyHamilton. https://github.com/dgretton/pyhamilton
- Modifique y calibre el archivo de diseño de la plataforma para el software del robot de manejo de líquidos para reflejar con precisión las posiciones del material de laboratorio en la plataforma del robot, como se muestra en la Figura 4.
NOTA: La configuración utilizada aquí utiliza el software proporcionado por el fabricante del robot de manipulación de líquidos, de acuerdo con la documentación proporcionada. - Ejecute el programa del método del robot PRANCE en modo de simulación.
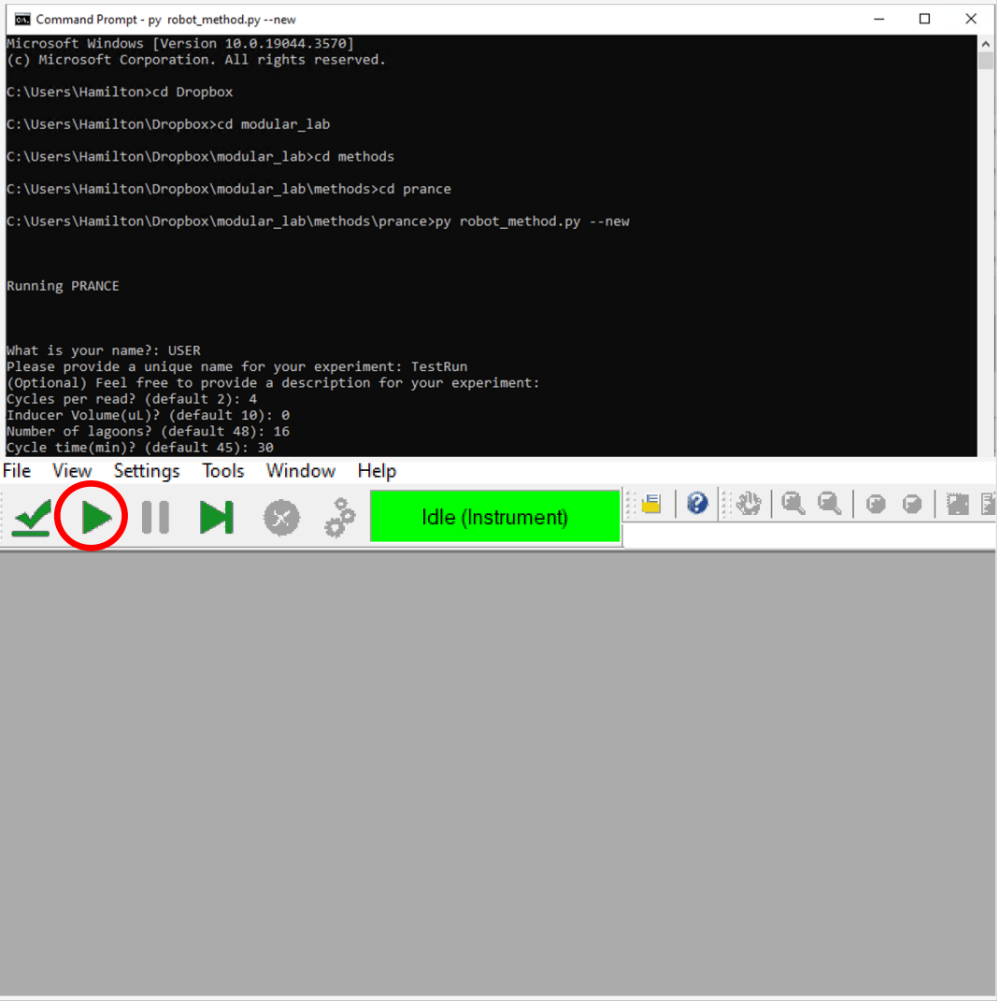
- Abra la línea de comandos con los siguientes comandos (en el sistema operativo Windows), como se muestra en la figura 5.
Tecla de Windows + R
Ingrese: cmd - Cambie el directorio principal por el directorio del programa del método robot. Introduzca un comando como el que se muestra a continuación con la ruta correcta, como se muestra en la figura 5.
CD c:\Robot_methods_directory\PRANCE - Llame al programa de método robot con Python con el indicador de modo de simulación, como se muestra en la Figura 5.
py robot_method.py --simulate - Seleccione el botón PLAY en la parte superior izquierda de la ventana Robot Run Control que se abrirá cuando se ejecute el programa (Figura 5).
NOTA: Asegúrese de que el método PRANCE pueda ejecutarse sin errores en la simulación antes de continuar. Se hace obvio si el script es capaz de operar en modo de simulación sin errores, ya que completará múltiples bucles del programa principal sin que se llame al manejo de errores del sistema, lo que termina el bucle del programa principal.
- Abra la línea de comandos con los siguientes comandos (en el sistema operativo Windows), como se muestra en la figura 5.
- Ejecute el programa del método del robot PRANCE con el modo de simulación desactivado.
- Abra la línea de comandos en el directorio correspondiente (figura 5).
Tecla de Windows + R
Ingrese: cmd
CD c:\Robot_methods_directory\PRANCE - Llame al programa del método robot con Python sin banderas:
Py robot_method.py - Seleccione el botón PLAY en la parte superior izquierda de la ventana Robot Run Control que se abrirá cuando se ejecute el programa.
- Confirme que PyHamilton puede controlar el instrumento y hacer que se inicialice.
- Abra la línea de comandos en el directorio correspondiente (figura 5).
- Establezca la sincronización de datos en tiempo real.
NOTA: Hasta la fecha, los sistemas PRANCE han utilizado computadoras en red que permiten a los usuarios monitorear los archivos de registro y los gráficos de medición del lector de placas en tiempo real a través de un software de intercambio remoto de archivos o a través de un escritorio remoto. - Desactiva las actualizaciones automáticas.
3. Preparación previa a la carrera
- Asegúrese de que las fuentes de cultivo bacteriano en fase logarítmica estén disponibles para todos los cultivos necesarios para el ciclo planificado y de que se agiten activamente para evitar la sedimentación. Use un quimiostato/turbidostat activo o un cultivo refrigerado precultivado que detenga el crecimiento.
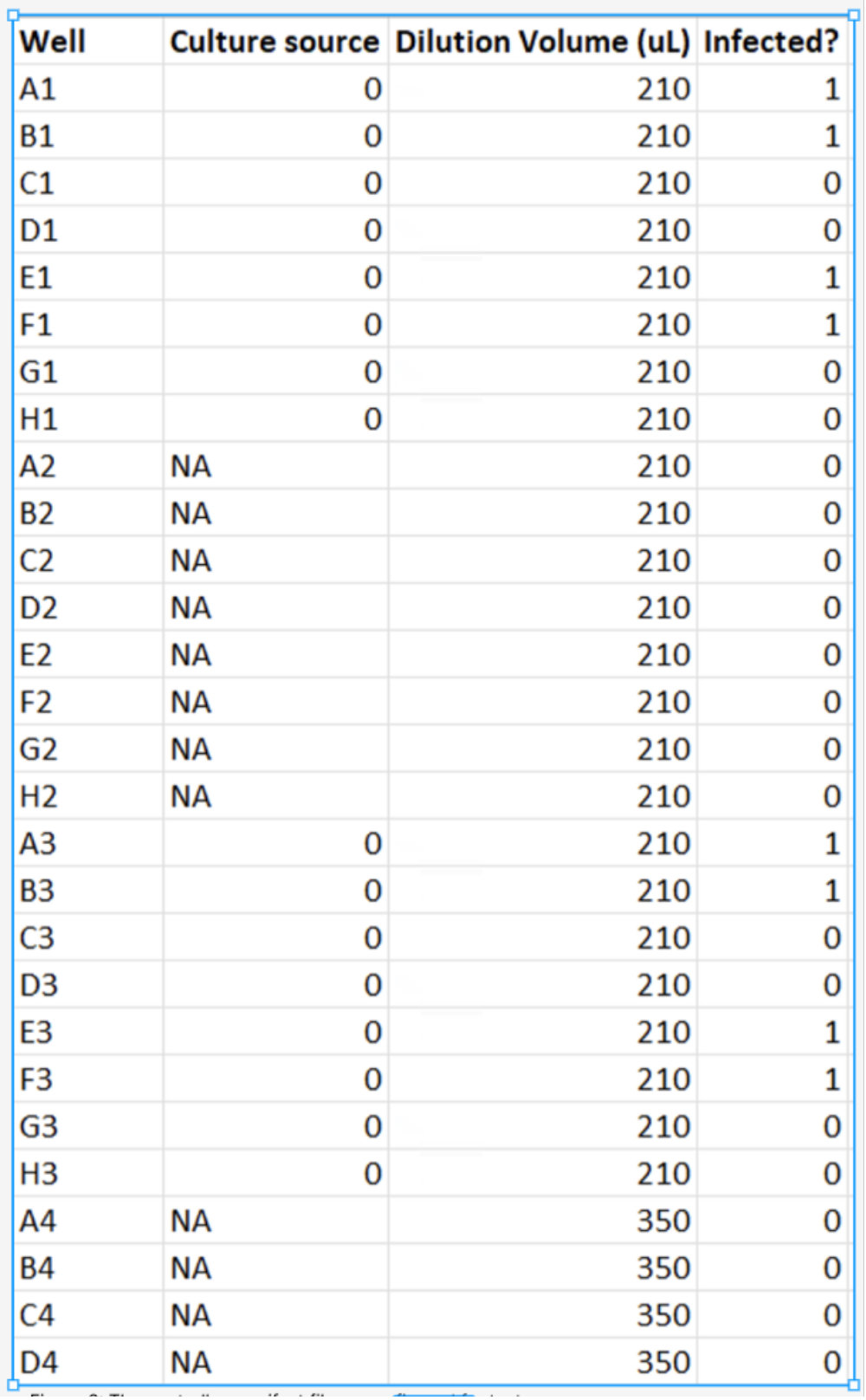
- Actualice el archivo de manifiesto del controlador con los detalles del volumen (rango 0-500 μL) de qué cultivo bacteriano se va a bombear en cada pocillo de la laguna de 96 pocillos por ciclo de programa. Esto permite un control preciso de la tasa efectiva de dilución de la laguna. Esto se puede ver en la Figura 6.
- Calcule la tasa de dilución de la laguna utilizando la hoja de cálculo DilutionCalculator.xlsx (proporcionada como Archivo Suplementario 2), como se ve en la Figura 7.
- Actualice el archivo robot_method.py con la altura de laguna prevista. Para seguir este protocolo, utilice 14 (en unidades milimétricas ) como valor predeterminado para la variable fixed_lagoon_height en el programa. Esto corresponde a un volumen de laguna de 550 μL en el sistema, pero puede diferir dependiendo de la placa de 96 pozos de profundidad utilizada en particular.
- Coloque las puntas de pipeta filtradas limpias en la plataforma del robot en sus posiciones designadas y pegue las gradillas de puntas a los soportes de puntas para garantizar la estabilidad durante el funcionamiento.
- Coloque placas limpias de 96 pocillos de profundidad en la plataforma del robot en sus posiciones designadas.
- Coloque placas lectoras limpias de 96 pocillos en la plataforma del robot en sus posiciones designadas.
- Asegúrese de que la bandeja del lector de placas no esté ocupada por una placa preexistente.
- Asegúrese de que las bombas estén conectadas a la computadora y estén asignadas a la dirección correcta.
- Limpie las líneas de bombeo activando las bombas para bombear lejía y luego agua.
- Conecte las líneas de bombeo a las fuentes y salidas adecuadas, prestando mucha atención para asegurarse de que las líneas correctas estén conectadas a los cultivos bacterianos relevantes.
- Rellene los tanques/cubos que contienen lejía/agua para el depósito bacteriano y el lavado de la punta de la pipeta.
- Asegúrese de que todos los componentes de la cubierta, en particular los elementos móviles, estén estabilizados en sus posiciones designadas.
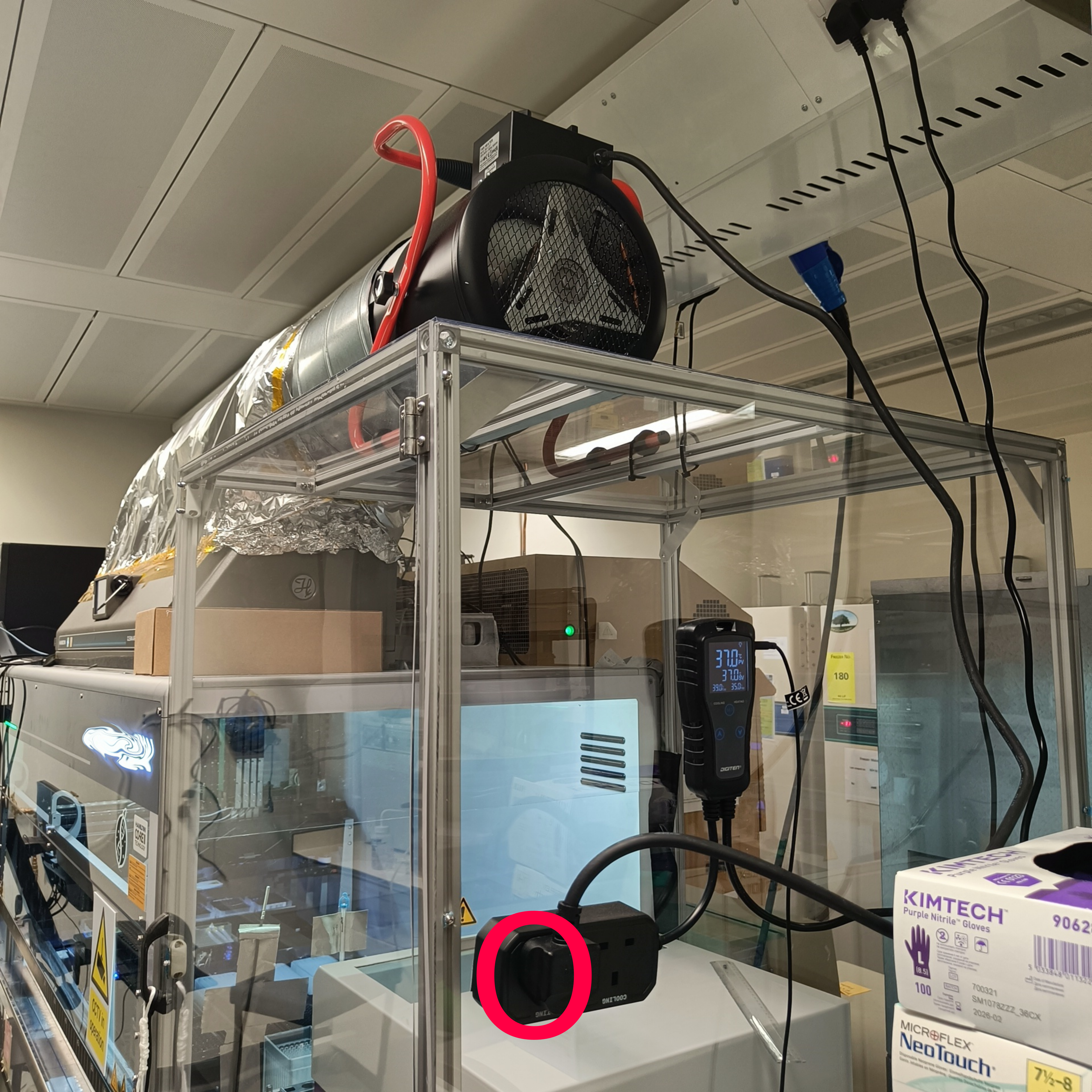
- Active los calentadores según la implementación local a la temperatura objetivo (es decir, 37 °C; Figura 8).
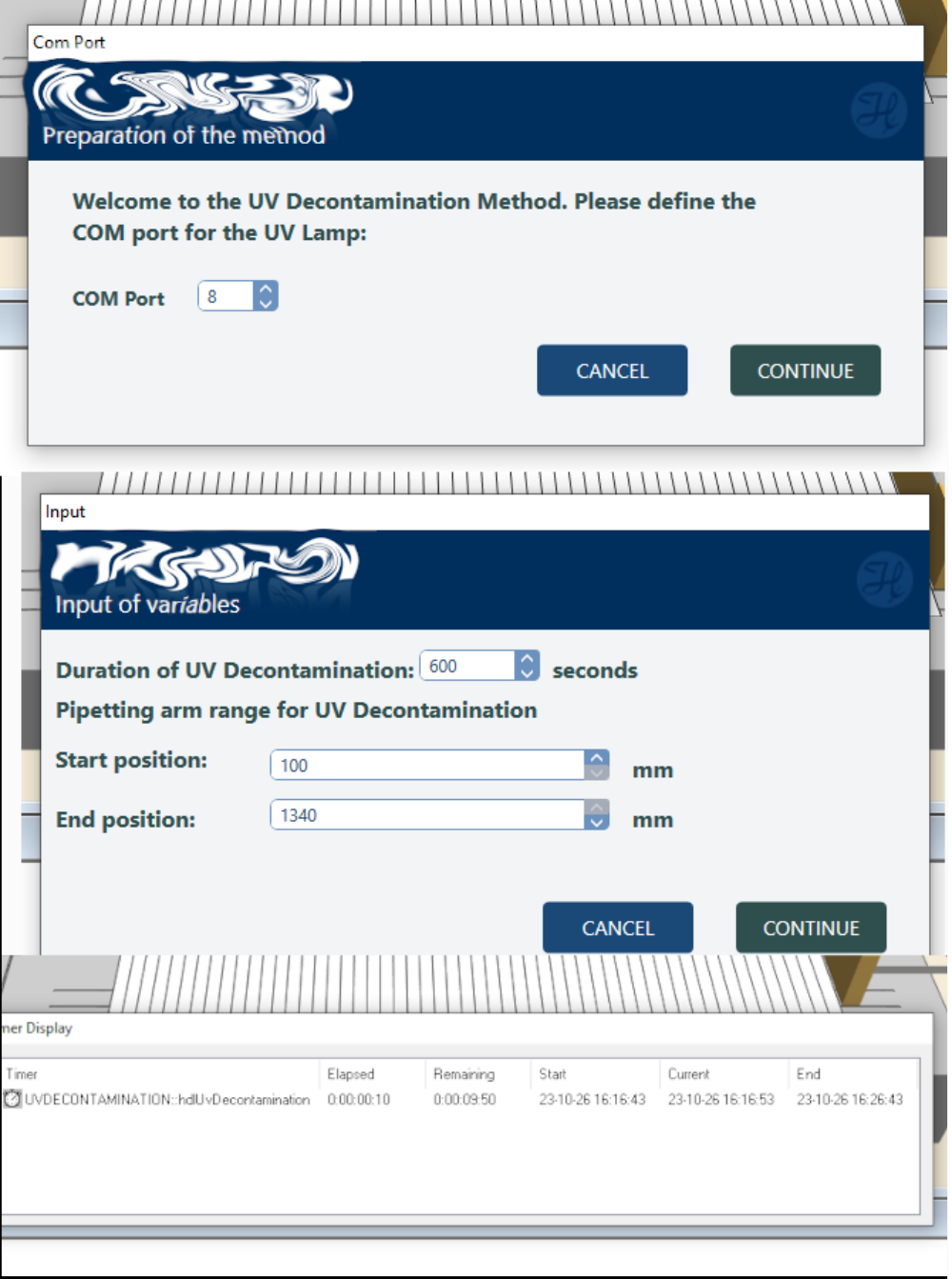
- Ejecute el archivo del protocolo de esterilización UV durante 10 minutos para operar la lámpara de esterilización UV incorporada en los robots de manipulación de líquidos suministrados por el fabricante (Figura 9).
- Seleccione el botón PLAY en la parte superior izquierda de la ventana Robot Run Control que se abrirá cuando se ejecute el programa.
- Ejecute el archivo con la opción parametrizada durante 600 s.
- Asegúrese de que el software Robot Run Control esté cerrado.
NOTA: El programa del método del robot se bloqueará si hay alguna instancia existente del software Run Control en ejecución.
4. Integración de hardware y software
- Llevar a cabo una "carrera de agua", en la que el programa del método del robot PRANCE se ejecuta durante la noche con agua sustituyendo a todos los cultivos y reactivos húmedos.
NOTA: Esta prueba se puede realizar a temperatura ambiente.- Complete la preparación previa a la corrida como se detalla anteriormente con la configuración de controller_manifest y robot_method para una tasa de dilución efectiva de la laguna de 1 volumen/h , como se muestra en la Figura 5 y la Figura 6.
- Conecte la línea de "entrada de bacterias" a un recipiente con agua para reemplazar las bacterias en fase logarítmica para el flujo de agua.
NOTA: Se puede agregar colorante alimentario a las fuentes de agua para rastrear el movimiento del líquido a través del experimento. - Abra la línea de comandos en el directorio correspondiente.
- Llame al programa del método robot con Python con el nuevo indicador de ejecución (py robot_method.py --new) e ingrese los argumentos solicitados, incluido el nombre del archivo de registro (TestRun), el número de pozos de laguna (16), la duración del ciclo (30), el número de ciclos por medición de la placa del lector (4) y el volumen del inductor (el volumen del inductor es 0 μL para esta prueba, durante una evolución en la que se induce mutagénesis con arabinosa, este valor puede ser de 10 μL), como se muestra en la Figura 5.
- Seleccione el botón PLAY en la parte superior izquierda de la ventana Robot Run Control que se abrirá cuando se ejecute el programa una vez que se hayan proporcionado los argumentos.
NOTA: El método PRANCE se puede iniciar utilizando una placa de laguna vacía, y el volumen de líquido de las lagunas se equilibrará con el volumen final durante los primeros seis ciclos.
- Llevar a cabo una "carrera solo de bacterias", en la que el protocolo PRANCE se ejecuta durante la noche solo con cultivo bacteriano a la temperatura objetivo pero sin bacteriófagos.
- Complete la preparación previa a la corrida como se detalla anteriormente con la configuración de controller_manifest y robot_method para una tasa de dilución efectiva de la laguna de 1 volumen/h, como se muestra en la Figura 5 y la Figura 6. Asegúrese de que los calefactores estén encendidos a una temperatura objetivo de 37 °C.
- Conecte la línea de "bacterias en" a la fuente seleccionada de bacterias en fase logarítmica.
- Abra la línea de comandos en el directorio correspondiente.
- Llame al programa del método robot con Python con el nuevo indicador de ejecución (py robot_method.py --new) e introduzca los argumentos solicitados, como se detalló anteriormente en la sección 4.1.4.
- Seleccione el botón PLAY en la parte superior izquierda de la ventana Robot Run Control que se abrirá cuando se ejecute el programa una vez que se hayan proporcionado los argumentos.
- Realice una "prueba de infección" en la que se desafíe a los fagos portadores de una proteína evolucionada a propagarse en bacterias que requieran esa proteína.
NOTA: Decidir de antemano qué lagunas serán inoculadas con fagos y cuáles no, y así servir como lagunas de control sin fagos para detectar la contaminación cruzada.- Complete la preparación previa a la ejecución como se detalla anteriormente con el controller_manifest y el robot_method configurados para una tasa de dilución efectiva de 1 volumen/h, como se muestra en la Figura 5 y la Figura 6. Asegúrese de que los calefactores estén encendidos a una temperatura objetivo de 37 °C.
- Conecte la línea de "bacterias en" a la fuente seleccionada de bacterias en fase logarítmica.
- Abra la línea de comandos en el directorio correspondiente.
- Llame al programa del método robot con Python con el nuevo indicador de ejecución (py robot_method.py --new) e introduzca los argumentos solicitados como se detalló anteriormente en la sección 4.1.4.
- Seleccione el botón PLAY en la parte superior izquierda de la ventana Robot Run Control que se abrirá cuando se ejecute el programa una vez que se hayan proporcionado los argumentos.
- Antes de agregar bacteriófagos, ejecute el método durante 2-3 h para equilibrar el volumen y el OD de bacterias en las placas de la laguna.
- Inocular las lagunas con fagos con 106 ufp/ml de bacteriófago al final de un ciclo de ejecución cuando el programa está en reposo (por ejemplo, 5,5 μl de alícuota de fagos a 108 ufp/ml, según lo determinado por ensayo de placa o qPCR), en una laguna de 550 μl.
- Ejecute el programa durante la noche y luego verifique el título de fagos en los pozos de la laguna mediante ensayo de placa o qPCR.
Resultados
Resultados de las pruebas de infección
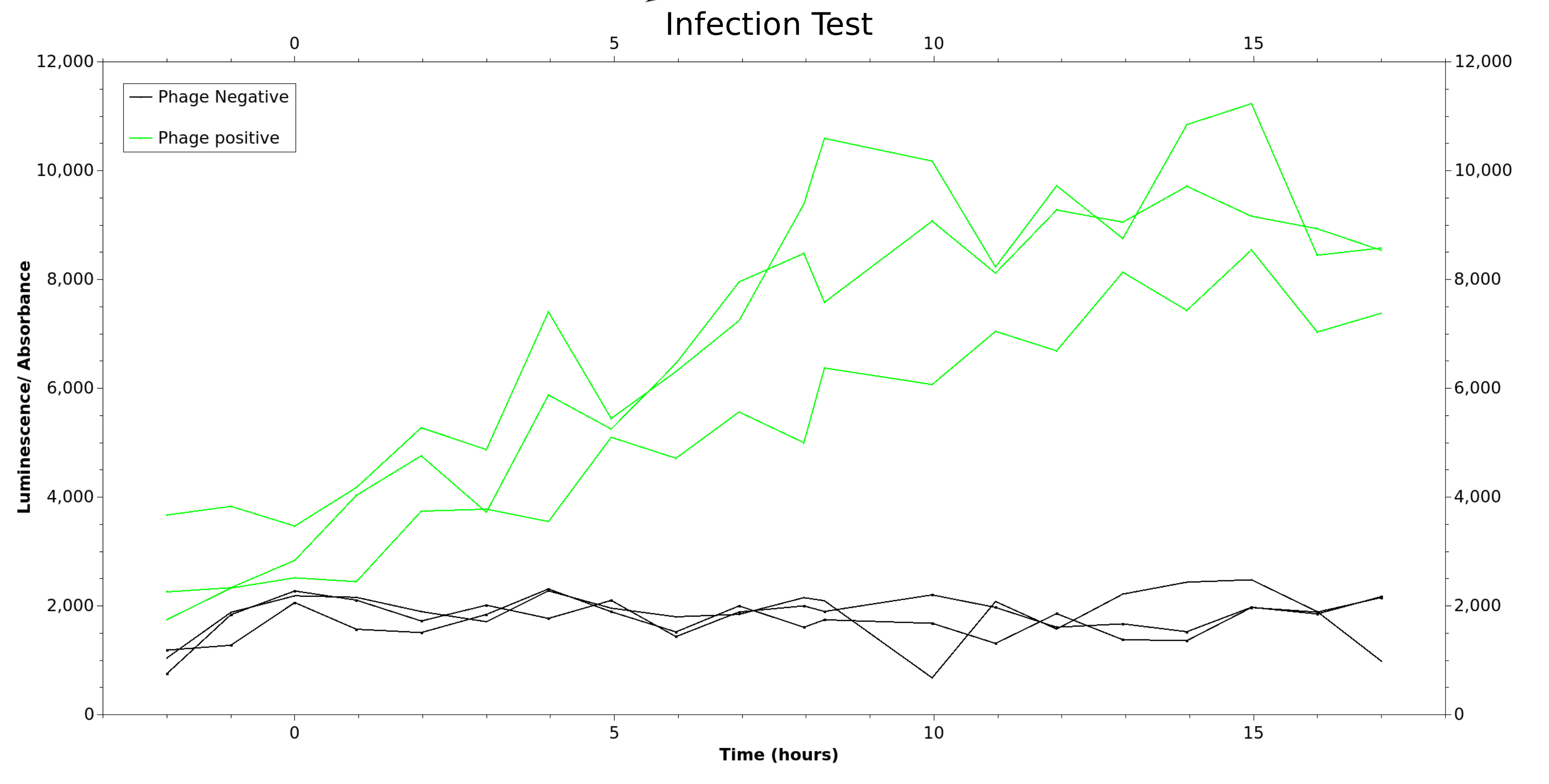
Esta prueba revelará problemas con el cultivo bacteriano, la clonación y el título de fagos, la estabilidad de la temperatura del equipo, la configuración de manejo de líquidos y la integración del lector de placas. Una prueba de infección por fagos exitosa revelará una infección clara y rápida por fagos en las lagunas inoculadas con fagos, y ninguna señal en las lagunas sin fagos. La figura 10 muestra algunos resultados representativos de una prueba de infección por fagos. Los resultados experimentales también pueden compararse con las Figuras 1d y 1c de este artículo PRANCE8, dependiendo de si se está implementando una configuración de "PRANCE caliente" (alimentado por un turbilostato bacteriano vivo) o "PRANCE frío" (alimentado por cultivo refrigerado en fase logarítmica media). Esta prueba puede revelar varios problemas comunes. Los problemas con la preparación del cultivo bacteriano a menudo pueden resultar en una infección débil o ausente. Las bacterias solo pueden ser infectadas de forma óptima por el fago M13 cuando se encuentran en fase logarítmica media y a 37 °C. A otras temperaturas y etapas de crecimiento, exhiben una expresión de pilus más débil y, por lo tanto, son menos susceptibles a la infección por fagos12. La inoculación con fagos de bajo título, o fagos con mutaciones en la columna vertebral puede dar lugar a un retraso o ausencia de señal. Los problemas con los ajustes de ganancia del lector de placas para fluorescencia o luminiscencia se revelarán mediante esta prueba.

Figura 1: Esquema del circuito genético que funciona durante la prueba de infección del aparato PRANCE. Cuando la ARN polimerasa T7, codificada en el genoma del fago, infecta al huésped Escherichia coli , se transcribe y se une al AP en el promotor T7, lo que conduce a la transcripción de la proteína del fago pIII y la proteína luxAB, lo que, a su vez, facilita la propagación del fago y la producción de luminiscencia. Abreviaturas: PRANCE = Evolución Casi Continua Asistida por Fagos y Robótica; AP = plásmido accesorio. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 2: Esquema de los componentes físicos del sistema PRANCE. Un refrigerador almacena cultivos agitados, que luego se trasladan a la plataforma del robot mediante una serie de bombas, al depósito bacteriano, "el gofre". El robot de manipulación de líquidos se utiliza para trasladar los cultivos bacterianos desde "el gofre" utilizando el cabezal de pipeteo hasta los pozos de retención para calentarlos hasta la temperatura de incubación, y luego a las lagunas donde se produce la incubación principal. Tanto los pozos de retención como las lagunas son placas estándar de pozos profundos de 2 mL. El robot toma muestras en placas lectoras de un solo uso, que a su vez se trasladan a un lector de placas para su medición. Abreviatura: PRANCE = Evolución Casi Continua Asistida por Fagos y Robótica. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

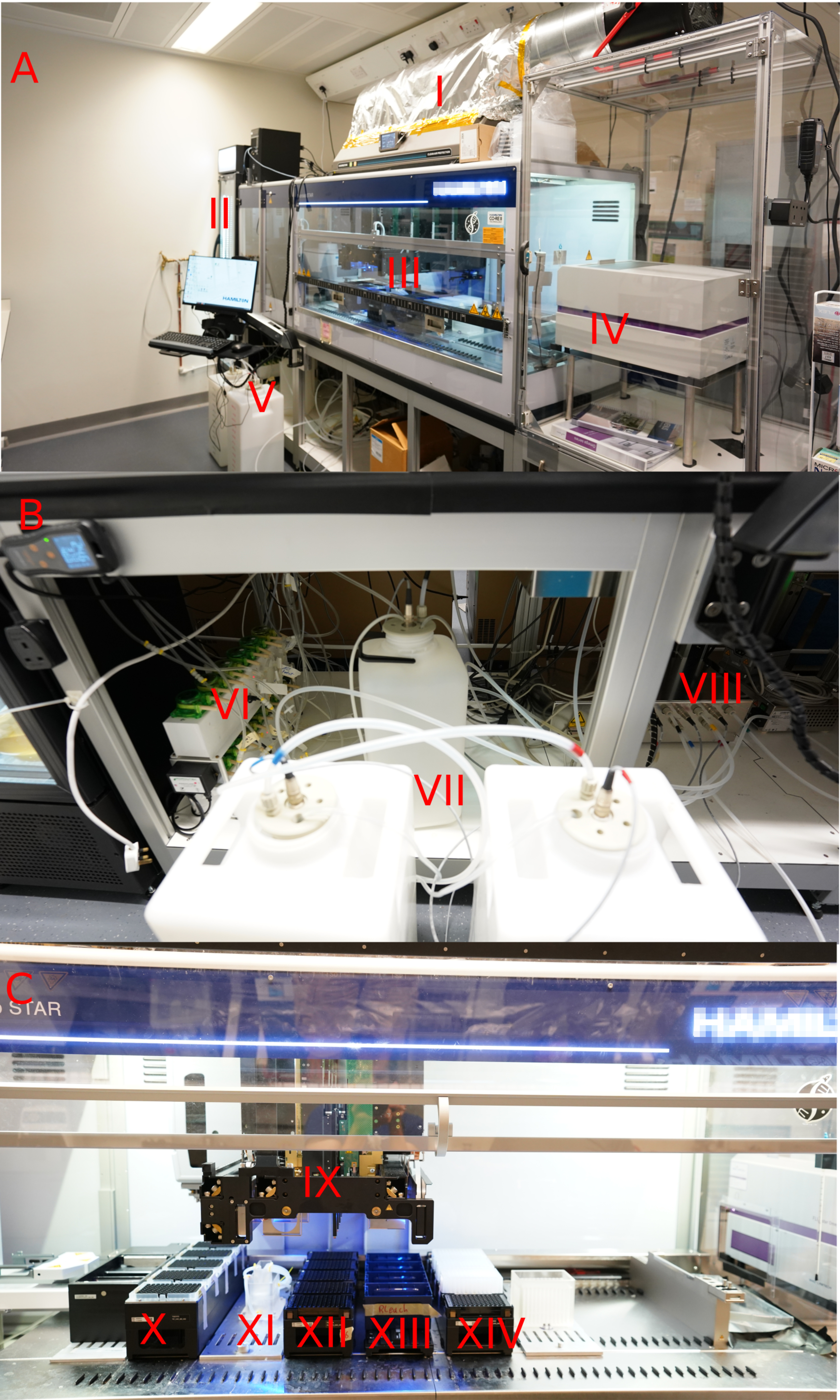
Figura 3: El aparato robótico PRANCE. (A) Configuración de PRANCE. (I) Filtro HEPA y calentador externo. II) Refrigerador de cultivo. (III) Recinto principal del robot. (IV) Lector de placas. (V) Bombas y tanques. (B) Recinto del robot. VI) Bombas de cultivo principales. (VII) Tanques de agua, residuos y lejía. (VIII) Bombas lavadoras. (C) Recinto del robot. (IX) Brazo de pipeteo y pinza del robot. (X) Puntas de pipeta. (XI) Componente impreso en 3D para permitir la distribución de cultivos en el robot ("el gofre"). (XII) Placas para la toma de muestras en el lector de placas. (XIII) Cubos para el lavado de puntas. (XIV) "Lagunas": recipientes de cultivo donde se lleva a cabo el cultivo evolutivo. Abreviaturas: PRANCE = Evolución Casi Continua Asistida por Fagos y Robótica; HEPA = aire particulado de alta eficiencia. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 4: Disposición de la cubierta. (A) Representación en 3D de la disposición de la cubierta en el software de control del robot. (B) Fotografía de los componentes de la cubierta. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 5: Captura de pantalla de la línea de comandos con parámetros de ejemplo (arriba) y software de control de ejecución (abajo). El botón de reproducción se encuentra en la parte superior izquierda y se puede hacer clic con un mouse o accionar con una pantalla táctil según la implementación local. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 6: El archivo de manifiesto del controlador tal como está configurado para las ejecuciones de prueba. Las lagunas que contienen el cultivo #0 estarían en las columnas 1 y 3 de la placa de 96 pozos de profundidad. Las columnas restantes estarían vacías. Las filas A, B, D y E de la placa de 96 pocillos profundos están marcadas en la columna derecha para la infección por fagos (1), las otras filas (0) son controles sin fagos. Esta instancia del manifiesto controlador daría como resultado que el programa diluyera la laguna con 210 μL de cultivo en cada ciclo. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 7: Cálculo de la tasa efectiva de dilución de la laguna utilizando la hoja de cálculo DilutionCalculator. Consulte el Archivo complementario 2 para ver la hoja de cálculo de DilutionCalculator. Como se ve en esta figura, una laguna de 550 μL que se diluye con 210 μL de cultivo fresco cada ciclo de 30 minutos, con muestras de 150 μL para la medición de la placa lectora que se toman cada cuatro ciclos, corresponderá a una tasa de dilución efectiva de 1,0 volúmenes de laguna/h (después de cada 1 h, permanecerá el 50% del líquido original de la laguna al comienzo de la hora) Haga clic aquí para ver una versión más grande de este figura.
{kind=link}

Figura 8: Sistema de calefacción del robot. El calentador se activa enchufando la fuente de alimentación como lo indica el círculo rojo. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 9: Configuración del protocolo de descontaminación UV. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 10: Medición de una prueba de infección realizada en el sistema PRANCE. Se toman muestras durante la ejecución y se realizan mediciones de luminiscencia y absorbancia. Para cada laguna, las mediciones de luminiscencia se dividen por la medición de absorbancia correspondiente y se trazan en función del tiempo. Las lagunas que han sido infectadas con fagos están coloreadas en verde, mientras que las lagunas de control no infectadas están coloreadas en negro. Abreviatura: PRANCE = Evolución Casi Continua Asistida por Fagos y Robótica. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
Archivo suplementario 1: Archivo STL para imprimir en 3D los componentes de la cubierta personalizados necesarios para el sistema PRANCE, incluidos, como mínimo, el reservorio bacteriano/colector de distribución ("waffle"). Haga clic aquí para descargar este archivo.
Archivo complementario 2: Hoja de cálculo de DilutionCalculator. Haga clic aquí para descargar este archivo.
Discusión
A pesar de los esfuerzos por estandarizar los equipos, en términos prácticos, cada configuración de PRANCE será diferente debido a los cambios en el suministro de equipos, el hardware y el control de versiones de software. Como resultado, cada configuración de PRANCE manifiesta desafíos de configuración únicos, lo que exige una comprensión integral del propósito de cada componente para una resolución de problemas modular efectiva.
Este método delinea un protocolo paso a paso para la configuración y prueba de un sistema PRANCE establecido. Primero nos centramos en los elementos críticos del hardware y el software y luego detallamos los pasos esenciales para preparar y realizar una serie de pruebas de funcionamiento, que establecen que el sistema está listo para PRANCE.
Una característica esencial del hardware es la optimización para reducir el riesgo de contaminación cruzada de muestras durante los experimentos multiplexados con bacteriófagos. Se recomienda utilizar exclusivamente puntas filtradas con tecnología de punta robótica que sea compatible con la reutilización de puntas y que esté pensada para minimizar los aerosoles producidos durante la expulsión de las puntas evitando las puntas de ajuste forzado. El lavado robusto de las puntas según este protocolo permite la reutilización de las puntas, aunque la idoneidad de esto debe validarse como parte de la prueba de infección en cada sistema. La autoesterilización también depende de un suministro constante de agua y lejía para el sistema. Estos se almacenan en tanques/cubos y, si se agotan, provocarán una autoesterilización deficiente y una rápida contaminación cruzada. Se pueden tomar fotografías de los tanques/cubos antes y después de que se ejecute el programa para comparar la velocidad a la que el equipo de lavado consume agua y lejía dada una configuración particular de la bomba.
Otro elemento clave del sistema es el mantenimiento de la fase de crecimiento bacteriano y la temperatura. Los experimentos PRANCE se llevan a cabo utilizando la cepa bacteriana S2060 de E. coli (Addgene: #105064). Se trata de una cepa que contiene plásmidos F derivados de K12 optimizada para reducir las biopelículas7. Además, el plásmido F de esta cepa se ha editado con la adición de un casete de resistencia a tetraciclina para el mantenimiento del plásmido, luxCDE y luxR para complementar la monitorización de luminiscencia mediada por luxAB, así como lacZ bajo el promotor de choque de fagos para permitir la visualización colorimétrica de las placas. El F-pilus codificado por plásmido F es necesario para la infección por el fago M13. Por lo tanto, las bacterias utilizadas en PACE deben cultivarse a 37 °C y en la fase media de logaritmo, cuando se expresa el F-pilus12 y es posible la infección, propagación y evolución del fago M13. Para la regulación estática de la temperatura, se puede emplear un portaplacas calefactado listo para usar. Una alternativa es simplemente calentar el aire que entra en el filtro HEPA utilizando calentadores económicos, aunque esto no se recomienda, ya que puede provocar un desgaste acelerado del hardware. Además, esto acelera la evaporación de los fluidos auxiliares de la cubierta, como los cubos de lejía/agua y el inductor, cuando se utilizan.
La calibración de los paquetes de software también es esencial para el correcto funcionamiento del sistema. Las divergencias entre el diseño de la plataforma de software y la plataforma del robot real son la causa más común de falla del sistema durante la operación. La calibración regular de las bombas auxiliares que suministran el cultivo bacteriano, la lejía y el drenaje del sistema es vital, ya que el uso de bombas peristálticas puede provocar el desgaste de la tubería y alteraciones en el volumen del fluido.
La prueba de funcionamiento del agua revelará rápidamente una serie de problemas comunes de configuración, incluidos ajustes incorrectos de manejo de líquidos, fugas de fluidos/conexiones defectuosas e inestabilidad del software. Un funcionamiento de agua exitoso no exhibirá fugas de líquido inesperadas y funcionará de manera estable sin errores durante la noche. Hay una serie de problemas comunes que pueden surgir durante un recorrido de agua, como la falta de ejecución de ciertos pasos de manejo de líquidos, el goteo de pipetas y la detención del protocolo a mitad de recorrido. En caso de que no se ejecuten ciertos pasos de manejo de líquidos, confirme que se hayan instalado todas las clases de líquidos. Estos enumeran la viscosidad y las velocidades de pipeteo adecuadas y se ajustan en el software de control del robot proporcionado por el fabricante. Si hay goteo de las pipetas, es importante que la configuración del brazo de pipeteo del robot sea correcta para permitir un pipeteo limpio y eliminar la contaminación cruzada de fagos. El pipeteo robótico exitoso requiere, además de las clases de líquido correctas, alturas correctas de diseño de la plataforma de todo el material de laboratorio y compensaciones de altura de pipeteo adecuadas especificadas en el programa del método del robot PRANCE. Estos desplazamientos de altura pueden requerir un ajuste directo. Si el protocolo se detiene a mitad de ejecución, a menudo esto se generará por una amplia gama de errores que indican que el archivo de diseño de la plataforma puede no coincidir con la configuración real de la plataforma.
La prueba de funcionamiento solo con bacterias revelará problemas con la configuración del lector de placas y la visualización de datos en tiempo real, problemas con una concentración excesiva de lejía o un enjuague insuficiente, y estabilidad de la temperatura. Una corrida exitosa solo con bacterias exhibirá un equilibrio de la absorbancia de la laguna durante los primeros tres ciclos, seguida de una absorbancia estable durante la duración de la corrida. Además, puede revelar varios problemas comunes. Este es el primer paso en el que se trazan los datos generados por el lector de placas. Es posible que los datos de la base de datos del lector de placas no se guarden correctamente o no se representen correctamente. Si las bacterias no logran equilibrar su absorbancia, esto puede indicar que la concentración de lejía es demasiado alta. El exceso de lejía o el lavado insuficiente pueden esterilizar todo el experimento, en lugar de solo la pieza de material de laboratorio. Si se sospecha esto, se pueden usar tiras detectoras de lejía para analizar la laguna. La estabilidad de la temperatura del cultivo se puede comprobar con una pistola termómetro.
Una prueba de infección correcta indica que el sistema está listo para las ejecuciones de PRANCE. Se puede realizar una prueba de infección inoculando un subconjunto de lagunas que contienen cultivos bacterianos. Estas bacterias expresarán pIII cuando sean infectadas por el fago apropiado que carece del gen de pIII (ΔgIII), lo que permite la propagación del fago. Una posible combinación para las pruebas es utilizar bacterias S2060 transformadas con un plásmido que exprese pIII bajo el promotor de choque de fagos con cualquier fago ΔgIII. Recomendamos utilizar el fago ΔgIII portador de la ARN polimerasa T7 de tipo salvaje con bacterias S2060 transformadas con un plásmido accesorio, en el que pIII y luxAB son impulsados por el promotor T7 (plásmido pJC173b13), como se ilustra en la Figura 1. Esto también permite la monitorización de la infección mediada por el lector de placas durante la ejecución de la prueba. La prueba definitiva del éxito de la prueba de infección y de la ausencia de contaminación cruzada provendrá de la titulación de fagos de las lagunas de prueba y control. Cuando se utiliza un indicador de luciferasa, un aumento de la luminiscencia solo en los pocillos de prueba, como se ve en la Figura 3, también es un indicador de infección y propagación exitosa de fagos. El estándar de oro para la cuantificación del título de fagos es el ensayo de placa7. También existe un protocolo para la cuantificación de M13 por qPCR7 que puede ser más rápido, aunque esto no discrimina entre partículas de fagos infecciosas y no infecciosas y, por lo tanto, puede sobrestimar los títulos.
El programa principal hace referencia a un archivo de manifiesto, este es un archivo de base de datos de texto sin formato, que dicta el volumen de dilución por ciclo de cada cultivo de propagación, así como la selección de cualquier número de posibles materias primas de cultivos bacterianos, que pueden diferir en el rigor de la selección. De esta manera, el archivo de manifiesto define muchos de los parámetros de la ejecución de PRANCE. Cabe señalar que este archivo puede ser editado durante la ejecución tanto por el operador como por el sistema, lo que significa que se puede realizar un control de retroalimentación manual o automático.
La utilidad de una configuración PRANCE en pleno funcionamiento radica en su capacidad para evolucionar rápidamente grandes poblaciones en un entorno cuidadosamente monitoreado y controlado. El formato basado en placas distingue a PRANCE de otras técnicas, como el uso de sistemas más pequeños basados en turbilostato disponibles en el mercado14,15. La configuración basada en placas no solo facilita la integración con pasos de procesamiento robótico adicionales, sino también la compatibilidad con otros instrumentos de laboratorio, como las centrífugas. Además, la capacidad de llevar a cabo una evolución acelerada simultáneamente a través de múltiples instancias introduce una dimensión adicional al experimento, lo que mejora la perspectiva de lograr resultados diversos y sólidos. El sistema granular de control y retroalimentación integral de PRANCE refuerza aún más la previsibilidad y confiabilidad del experimento, marcando un avance significativo en el campo de las técnicas de evolución dirigida. Sin embargo, esta técnica está limitada en el número de experimentos paralelos que puede realizar. Dependiendo de la configuración, las configuraciones de PRANCE suelen estar limitadas por la velocidad de pipeteo del robot o por el espacio disponible en la plataforma.
El mismo hardware y software utilizados para PRANCE también se pueden aplicar a métodos de evolución que no involucran bacteriófagos. Como se demostró en el método de muchos turbidostatos11, este mismo instrumento puede emplearse exclusivamente con bacterias, lo que permite experimentos de evolución adaptativa de todo el genoma. Esta adaptabilidad amplía el alcance de este instrumento, allanando el camino para nuevas formas de evolución acelerada por la robótica.
Divulgaciones
Los autores no tienen conflictos que revelar.
Agradecimientos
Agradecemos a Emma Chory y Kevin Esvelt por su ayuda y asesoramiento con la configuración de hardware y software. Samir Aoudjane, Osaid Ather y Erika DeBenedictis cuentan con el apoyo de la Beca para Investigadores Tempranos de Steel Perlot. Este trabajo contó con el apoyo del Instituto Francis Crick, que recibe su financiación principal de Cancer Research UK (CC2239), el Consejo de Investigación Médica del Reino Unido (CC2239) y el Wellcome Trust (CC2239).
Materiales
| Name | Company | Catalog Number | Comments |
| 3D printed bacterial reservoir "waffle" | - | - | https://drive.google.com/file/d/16ELcvfFPzBzNSto0xUrBe-shi23J9Na7/view; For Robot deck |
| 3D printer | FormLabs | Form 3B+ | 3D printer components |
| 3D printer resin (clear) | FormLabs | RS-F2-GPCL-04 | consumable for 3D printer |
| 8-1,000 µL head | Hamilton | 10140943 | For Liquid handling robot |
| 96-1,000 µL pipetting head | Hamilton | 10120001 | For Liquid handling robot |
| Black polystyrene plate reader microplates | Millipore Sigma | CLS3603 | For Robot deck |
| BMG Labtech Spectrostar FLuorstar Omega | BMG Labtech | 10086700 | For Liquid handling robot |
| Cleaning solution | Fluorochem Limited | F545154-1L | used to clean the liquid handling parts of the robot |
| Deep Well plates | Appleton Woods | ACP006 | these are used to contain evolving bacteria on the deck of the robot |
| encolsure heater | Stego | 13060.0-01 | heats inside robot enclosure |
| Hamilton STAR | Hamilton | 870101 | For Liquid handling robot |
| Heater | Erbauer | BGP2108-25 | For Liquid handling robot |
| HIG Bionex centrifuge | Hamilton | 10086700 | For Liquid handling robot |
| iSWAP plate gripper | Hamilton | 190220 | For Liquid handling robot |
| laboratory tubing | Merck | Z280356 | to construct liquid handling manifold |
| luer to barb connector | AIEX | B13193/B13246 | for connectorizing tubing |
| Magnetic stir plate | Camlab | SKU - 1189930 | For Auxiliary Fridge |
| Molcular pipetting arm | Hamilton | 173051 | For Liquid handling robot |
| Omega | BMG labtech | 5.7 | plate reader control software |
| One way Check Valves | Masterflex | MFLX30505-91 | to one way sections of liquid handling manifold |
| pyhamilton | MIT/Open source | https://github.com/dgretton/std-96-pace%20PRANCE | open source python robot control software |
| pymodbus | opensource | 3.5.2 | python pump software interface |
| Refrigetator | Tefcold | FSC175H | allows cooled bacteria to be used instead of turbidostat |
| S2060 Bacterial strain | Addgene | Addgene: #105064 | E. coli |
| temperature controller | Digiten | DTC102UK | Used to control heaters thermostatically |
| Thermostat switch controller | WILLHI | WH1436A | WILLHI WH1436A 10 A Temperature Controller 110 V Digital Thermostat Switch Sous Vide Controller NTC 10K Sensor Improved Version; for Liquid handling robot |
| Venus | Hamilton | 4.6 | proprietary robot control software |
| Wash Station for MPH 96/384 | Hamilton | 190248 | For Liquid handling robot |
| Suggested pump manufacturers | |||
| Company | Catalog number | Notes | Documentation |
| Agrowtek | AD6i Hexa Pump | https://www.agrowtek.com/doc/im/IM_ADi.pdf | |
| Amazon | INTLLAB 12V DC | ||
| Cole-Parmer | EW-07522-3 | Masterflex L/S Digital Drive, 100 RPM, 115/230 VAC | https://pim-resources.coleparmer.com/instruction-manual/a-1299-1127b-en.pdf |
| Cole-Parmer | EW-07554-80 | Masterflex L/S Economy variable-speed drive, 7 to 200 rpm, 115 VAC | https://pim-resources.coleparmer.com/instruction-manual/a-1299-1127b-en.pdf |
Referencias
- Esvelt, K. M., Carlson, J. C., Liu, D. R. A system for the continuous directed evolution of biomolecules. Nature. 472, 499-503 (2011).
- Pu, J., Zinkus-Boltz, J., Dickinson, B. C. Evolution of a split RNA polymerase as a versatile biosensor platform. Nat Chem Biol. 13 (4), 432-438 (2017).
- Pu, J., Disare, M., Dickinson, B. C. Evolution of C-terminal modification tolerance in full-length and split T7 RNA polymerase biosensors. Chembiochem. 20 (12), 1547-1553 (2019).
- Xie, V. C., Styles, M. J., Dickinson, B. C. Methods for the directed evolution of biomolecular interactions. Trends Biochem Sci. 47 (5), 403-416 (2022).
- Popa, S. C., Inamoto, I., Thuronyi, B. W., Shin, J. A. Phage-assisted continuous evolution (PACE): A guide focused on evolving protein-DNA interactions. ACS Omega. 5 (42), 26957-26966 (2020).
- Wang, T., Badran, A. H., Huang, T. P., Liu, D. R. Continuous directed evolution of proteins with improved soluble expression. Nat Chem Biol. 14 (10), 972-980 (2018).
- Miller, S. M., Wang, T., Liu, D. R. Phage-assisted continuous and non-continuous evolution. Nat Protoc. 15 (12), 4101-4127 (2020).
- DeBenedictis, E. A., et al. Systematic molecular evolution enables robust biomolecule discovery. Nat Methods. 19 (1), 55-64 (2022).
- Zhong, Z., et al. Automated continuous evolution of proteins in vivo. ACS Synth Biol. 9 (6), 1270-1276 (2020).
- Roth, T. B., Woolston, B. M., Stephanopoulos, G., Liu, D. R. Phage-assisted evolution of Bacillus methanolicus methanol dehydrogenase 2. ACS Synth Biol. 8 (4), 796-806 (2019).
- Chory, E. J., Gretton, D. W., DeBenedictis, E. A. Enabling high-throughput biology with flexible open-source automation. Mol Syst Biol. 17 (3), 9942(2021).
- Novotny, C. P., Lavin, K. Some effects of temperature on the growth of F pili. J Bacteriol. 107 (3), 671-682 (1971).
- Carlson, J. C., Badran, A. H., Guggiana-Nilo, D. A., Liu, D. R. Negative selection and stringency modulation in phage-assisted continuous evolution. Nat Chem Biol. 10 (3), 216-222 (2014).
- Steel, H., Habgood, R., Kelly, C., Papachristodoulou, A. In situ characterization and manipulation of biological systems with Chi.Bio. PLOS Biology. 18 (7), e3000794(2020).
- Wong, B. G., Mancuso, C. P., Kiriakov, S., Bashor, C. J., Khalil, A. S. Precise, automated control of conditions for high-throughput growth of yeast and bacteria with eVOLVER. Nat Biotechnol. 36 (7), 614-623 (2018).
Reimpresiones y Permisos
Solicitar permiso para reutilizar el texto o las figuras de este JoVE artículos
Solicitar permisoExplorar más artículos
This article has been published
Video Coming Soon
ACERCA DE JoVE
Copyright © 2025 MyJoVE Corporation. Todos los derechos reservados