
Method Article
Faj ve Robotik Destekli Neredeyse Sürekli Evrim için Pratik Bir Kılavuz
Bu Makalede
Özet
Faj ve Robotik destekli Yakın Sürekli Evrim (PRANCE), hızlı ve sağlam protein evrimi için bir tekniktir. Robotik, deneylerin paralelleştirilmesine, gerçek zamanlı izlemeye ve geri bildirim kontrolüne izin verir.
Özet
Robotik hızlandırmalı Evrim teknikleri, geri besleme kontrolünü kullanarak evrimin güvenilirliğini ve hızını artırarak protein ve organizma evrimi deneylerinin sonuçlarını iyileştirir. Bu makalede, Faj ve Robotik destekli Yakın Sürekli Evrimi (PRANCE) uygulamak için gerekli donanım ve yazılımı kurmak için bir kılavuz sunuyoruz. PRANCE, hızlı faj tabanlı moleküler evrimi, yüzlerce bağımsız, geri bildirim kontrollü evrim deneyini aynı anda yürütme yeteneği ile birleştirir. Bu belge, bir sıvı işleme cihazı, bir plaka okuyucu, yardımcı pompalar, ısıtıcılar ve 3D baskılı kaplar dahil olmak üzere PRANCE için donanım gereksinimlerini ve kurulumunu açıklayacaktır. Sıvı taşıma robotunun Python tabanlı açık kaynaklı yazılımla uyumlu olacak şekilde nasıl yapılandırılacağını açıklıyoruz. Son olarak, yeteneklerini kullanan ve sistemin çoğullanmış evrim yürütmeye hazır olduğunu doğrulayan yeni inşa edilmiş bir PRANCE sistemi ile yürütülebilecek ilk iki deney için öneriler sunuyoruz. Bu kılavuz, robotik hızlandırmalı evrimin yürütülmesiyle ilgili önemli ekipman kurulumunda gezinmek için bir el kitabı olarak hizmet etmeyi amaçlamaktadır.
Giriş
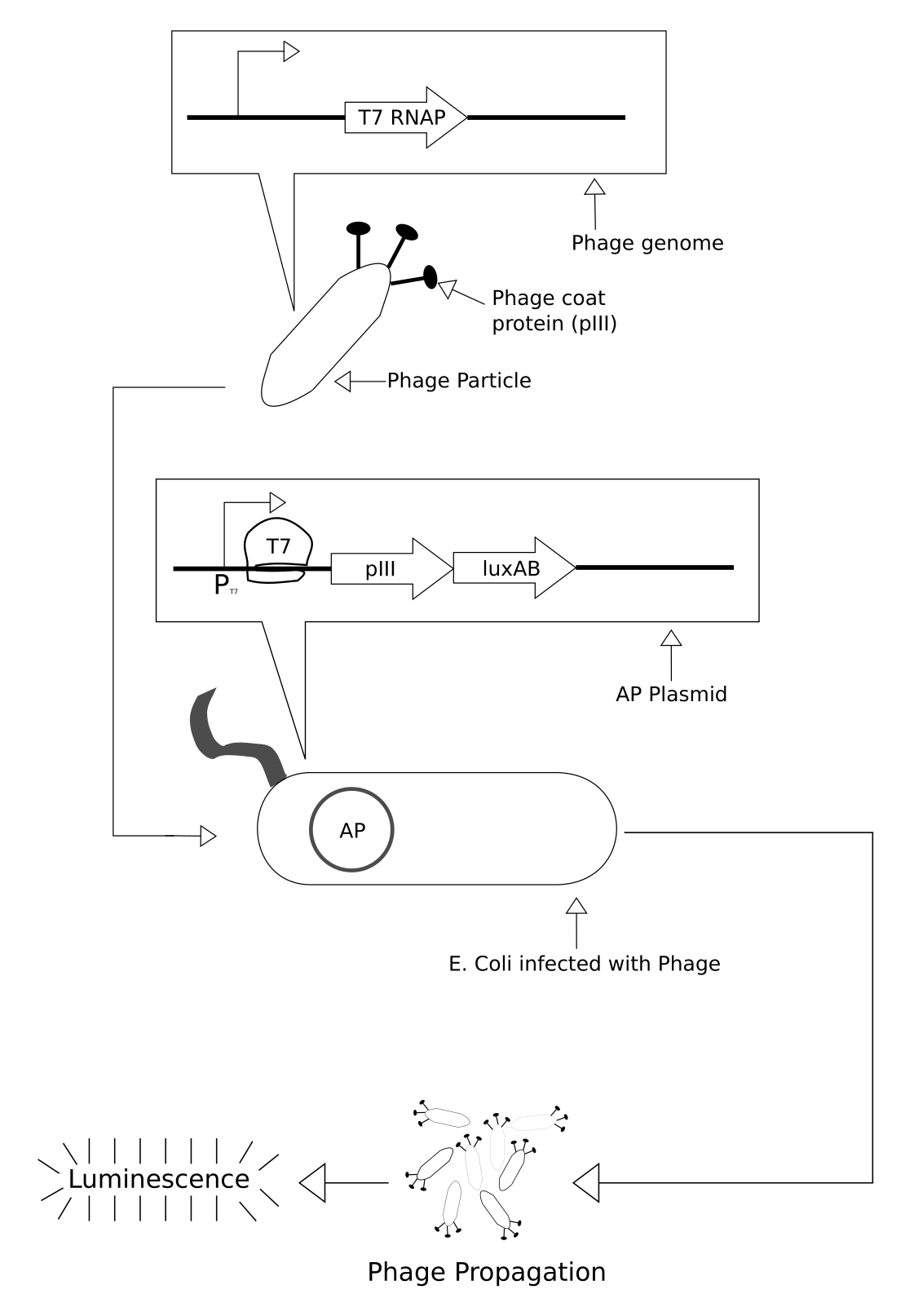
PRANCE, iki güçlü yönlendirilmiş evrim tekniğinin birleşimidir. Birincisi, gen çeşitlendirme ve seçilim turlarını M13 bakteriyofajının hızlı yaşam döngüsüne bağlayan ve sıvı faj kültüründe sürekli olarak hızlı evrim turlarının gerçekleşmesini sağlayan moleküler bir teknik olan PACE1'dir. Bu seçim, evrimleşen proteinin işlevini, faj yayılımı için gerekli olan M13'ün kuyruk kaplama proteini olan pIII'ün ekspresyonuna bağlayan plazmid kodlu bir gen devresinin kullanılmasıyla yönlendirilir, bu Şekil 1'de gösterilmiştir. Deneysel düzeyde, sıvı faj kültürünün sürekli seyreltilmesi, sürekli seçime izin verir. Bu nedenle, seçim sıkılığı hem gen devresi düzeyinde hem de faj kültürü seyreltme hızı kontrol edilerek deneysel düzeyde modüle edilebilir. Bu nedenle PACE, pIII ekspresyonunu indüklemek için E. coli bakterilerinde istenen aktiviteyi tespit edebilen bir moleküler sensörün bulunduğu herhangi bir biyomolekül mühendisliği zorluğuna uygulanabilir. Uygulamalar, protein-protein bağlanmasının 2,3,4, protein-DNA bağlanmasının5, protein çözünürlüğünün6 ve çok sayıda spesifik enzimatik fonksiyonun7 evrimini içerir. İkincisi, yönlendirilmiş evrimin iki yaygın başarısızlık modunu ortadan kaldırmak için bir geri bildirim denetleyicisi kullanan Robotik hızlandırmalı Evrim 8,9'dur: çevre çok katı olduğunda meydana gelen yok olma ve çevre çok yumuşak olduğunda ortaya çıkan evrim eksikliği. PANCE'de (Faj Destekli Sürekli Olmayan Evrim)7,10'da yapıldığı gibi fajın seri geçişinden farklı olarak, Robotik hızlandırmalı "neredeyse sürekli" evrim, kültürleri orta log fazında tutan ve popülasyonların sürekli enfeksiyon ve yayılma döngüleri yaşamasına izin veren hızlı pipetlemeyi içerir. Bu iki teknoloji birlikte kullanıldığında, sağlam, çoğullanmış ve hızlı sürekli evrim sağlayan Faj ve Robotik destekli Yakın Sürekli Evrim8 için PRANCE olarak adlandırılırlar. PRANCE, polimerazları, tRNA'ları ve amino-asil tRNA sentetazlarını geliştirmek ve bu evrimler sırasında hızlarını ve güvenilirliklerini artırmak için geri besleme kontrolü yapmak için kullanılmıştır8.
Bir sıvı işleme robotunda bakteriyofaj kullanımını sağlayan PRANCE için donanım ve yazılım kurulumunun birkaç ayrıntısı vardır. Robot üreticisi tarafından sağlanan varsayılan yazılımı kullanmak yerine, hızlı, eşzamanlı yürütmeyi ve böylece yarı sürekli biyoreaktörleri orta log fazında tutma yeteneğini sağlayan python tabanlı açık kaynaklı bir yazılım paketi11 kullanıyoruz. Araştırmacının elden çıkarma süresi, güvertedeki birkaç bileşenin rutin olarak kendi kendini sterilize etmesiyle birkaç güne kadar uzatılabilir ve bu, bu bileşenleri ağartabilen ve durulayabilen pompaların otomatik kontrolü ile elde edilir. Faj çapraz kontaminasyonu, zorla takılan uçlar kullanmayan bir sıvı işleme robotunun kullanılması ve sıvı işleme ayarlarının dikkatli bir şekilde ayarlanmasıyla ortadan kaldırılabilir.
Protokol
1. Donanım kurulumu
NOT: Bir PRANCE sisteminin donanım bileşenlerine genel bir bakış için Şekil 2'ye ve bu bileşenlerin fiziksel olarak monte edilmiş fotoğrafları için Şekil 3'e bakın.
- Bir sıvı taşıma cihazı, bir plaka okuyucu ve yardımcı pompalar dahil olmak üzere PRANCE sistemi için birincil donanımı edinin.
NOT: Bugüne kadarki tüm PRANCE sistemleri, 8 kanallı, ayrı ayrı adreslenebilir pipetleme kolları, tek pistonlu 96 uçlu pipetleme kolu, hareketli plakalar için robotik tutucu, uç sterilizasyonu için entegre bir yıkama istasyonu ve absorbans ve lüminesans ölçümleri yapabilen entegre bir plaka okuyucu ile donatılmış Orta ila Büyük Boy sıvı işleme cihazlarına uygulanmıştır. - Sıvı işleme robotunun modeline ve özelliklerine bağlı olarak ısıtma stratejilerini yapılandırın. Isıtmalı bir plaka taşıyıcı veya ısıtıcı aracılı robot klima kontrolü kullanın.
- Ucun yeniden kullanılmasına izin vermek için bir uç yıkama istasyonu kurun.
NOT: Bugüne kadar, PRANCE sistemleri kullanıma hazır yıkama istasyonları kullanmıştır, ancak prensip olarak bu bileşen düşük maliyetli bileşenlerden kolayca yapılabilir. - Kemostat/türbidotat olarak 37 °C'de çalışan gerçek zamanlı bir biyoreaktör kurarak log fazında tutulan bir bakteri kültürü kaynağı oluşturun. Alternatif olarak, yakındaki bir buzdolabında 4 ° C'de log fazında (0,25 ile 0,45 arasında OD600 ) 37 ° C'de önceden yetiştirilmiş en az 1 L hacimli bir log faz bakteri kültürünü tutuklayın. İster soğutulmuş ister ılık olsun, çökelmeyi önlemek için kültürün bir çalkalayıcı plaka veya karıştırma plakası kullanılarak düzenli olarak karıştırıldığından emin olun.
- Gerekli yazılım ve sürücülerle robotik entegrasyon için tercih edilen pompaları yapılandırın. Pompaların 10-100 mL mertebesinde tanımlanmış miktarlarda sıvı vermesini sağlamak için yazılımı uygulayın.
NOT: Bu uygulamada kullanılan pompalar için Malzeme Tablosuna ve bu pompaları çalıştırmak için kullanılan yazılım ve bunların nasıl yapılandırılacağına ilişkin belgeler için üreticinin web sitesine bakın. Bu el yazmasında gösterilen PRANCE kurulumunda kullanılan pompalar için bu tür bir yazılım, aşağıdaki GitHub deposunda açık kaynak olarak sağlanmaktadır https://github.com/dgretton/std-96-pace PRANCE, üç ayrı kanalı pompalayabilen en az üç pompalı bir manifold gerektirir (bakterileri bakteri rezervuarına iletin, çamaşır suyunu bakteri rezervuarına iletin ve bakteri rezervuarını boşa boşaltın), her birinin hızı kalibre edilmiş ve bağımsız olarak kontrol edilmiştir. Geçmişte, insanlar akvaryum pompaları ve hidroponik pompa dizileri kullandılar, ancak prensipte herhangi bir piton kontrollü peristaltik pompa kullanılabilir. Temel işlevler arasında, plakaları okuyucunun içine veya dışına aktarmak, bir plaka okuyucu ölçümü başlatmak ve ölçümlere erişmek için bir robot tutucu kullanma yeteneği yer alır. - Ek Dosya 1'de (https://drive.google.com/file/d/16ELcvfFPzBzNSto0xUrBe-shi23J9Na7/view?usp=share_link) bulunduğu gibi, en azından bakteri rezervuarı/dağıtım manifoldu ("waffle") dahil olmak üzere PRANCE sistemi için gerekli özel güverte bileşenlerini 3D Yazdırın. Bu konteynerleri güverteye sabitleyin ve standart Sıvı Taşıma Robotu yazılımını kullanarak konumlarını kalibre edin. Rezervuarı pompa dizisine bağlayın.
NOT: Robota bağlı olacağından kalibrasyonun nasıl yapılacağına ilişkin ayrıntılar için robot üreticisinin belgelerine bakın. Reçine bazlı 3D yazıcılar en uygun olanlardır; kullanılan yazıcı tipine bir örnek Malzeme Tablosunda verilmiştir; Varsayılan yazıcı ayarlarıyla standart şeffaf reçine kullanılmıştır. - Sistemi yerel biyogüvenlik önerileriyle uyumlu bir tahliye ile donatın.
- Laboratuvar gereçlerini Şekil 4'te örneklendiği gibi Sıvı Taşıma Robotunun güvertesine yerleştirin.
- Standart laboratuvar kişisel koruyucu ekipmanlarının (örn. laboratuvar önlüğü, eldivenler ve göz koruması) kullanımı da dahil olmak üzere standart güvenlik prosedürlerini izleyin.
2. Yazılım hazırlığı
- Açık kaynaklı PyHamilton deposunda bulunan python11 ile Sıvı İşleme robotlarını kontrol etmek için kullanılan açık kaynaklı yazılımı yükleyin. https://github.com/dgretton/pyhamilton
- Şekil 4'te gösterildiği gibi, robot güvertesindeki laboratuvar yazılımı konumlarını doğru bir şekilde yansıtmak için Sıvı Taşıma robot yazılımı için güverte düzenini değiştirin ve kalibre edin.
NOT: Burada kullanılan kurulum, sağlanan belgelere göre sıvı işleme robotunun üreticisi tarafından sağlanan yazılımı kullanır. - PRANCE robot metot programını simülasyon modunda çalıştırın.
- Komut Satırını, Şekil 5'te gösterildiği gibi aşağıdaki komutlarla (Windows işletim sisteminde) açın.
Windows tuşu + R
Girin: cmd - Üst dizini robot yöntem programının dizinine değiştirin. Şekil 5'te gösterildiği gibi doğru yolla aşağıdaki gibi bir komut girin.
CD c:\Robot_methods_directory\PRANCE - Şekil 5'te gösterildiği gibi simülasyon modu bayrağıyla Python ile robot yöntemi programını çağırın.
py robot_method.py --benzetim - Program yürütüldüğünde açılacak olan Robot Çalıştırma Kontrolü penceresinin sol üst köşesindeki OYNAT düğmesini seçin (Şekil 5).
NOT: İlerlemeden önce PRANCE yönteminin simülasyonda hatasız çalışabildiğinden emin olun. Komut dosyasının simülasyon modunda hatasız çalışıp çalışamayacağı belli olur, çünkü ana program döngüsünü sonlandıran sistemin hata işleme çağrılmadan ana programın birden çok döngüsünü tamamlayacaktır.
- Komut Satırını, Şekil 5'te gösterildiği gibi aşağıdaki komutlarla (Windows işletim sisteminde) açın.
- PRANCE robot metodu programını simülasyon modu devre dışıyken çalıştırın.
- Komut Satırı'nı uygun dizinde açın (Şekil 5).
Windows tuşu + R
Girin: cmd
CD c:\Robot_methods_directory\PRANCE - Bayraklar olmadan Python ile robot yöntemi programını çağırın:
py robot_method.py - Program yürütüldüğünde açılacak olan Robot Run Control penceresinin sol üst köşesindeki PLAY düğmesini seçin.
- PyHamilton'un cihazı kontrol edebildiğini ve başlatılmasını sağlayabildiğini onaylayın.
- Komut Satırı'nı uygun dizinde açın (Şekil 5).
- Gerçek zamanlı veri senkronizasyonu kurun.
NOT: Bugüne kadar, PRANCE sistemleri, kullanıcıların günlük dosyalarını ve gerçek zamanlı plaka okuyucu ölçüm grafiklerini uzak dosya paylaşım yazılımı veya uzak bir masaüstü aracılığıyla izlemesine olanak tanıyan ağa bağlı bilgisayarlar kullanmıştır. - Otomatik güncellemeleri kapatın.
3. Koşu öncesi hazırlık
- Planlanan çalışma için gerekli tüm kültürler için log fazında bakteri kültürü kaynaklarının mevcut olduğundan ve çökelmeyi önlemek için aktif olarak karıştırıldığından emin olun. Aktif bir kemostat/türbidostat veya büyümeyi durdurmuş, soğutulmuş, önceden yetiştirilmiş bir kültür kullanın.
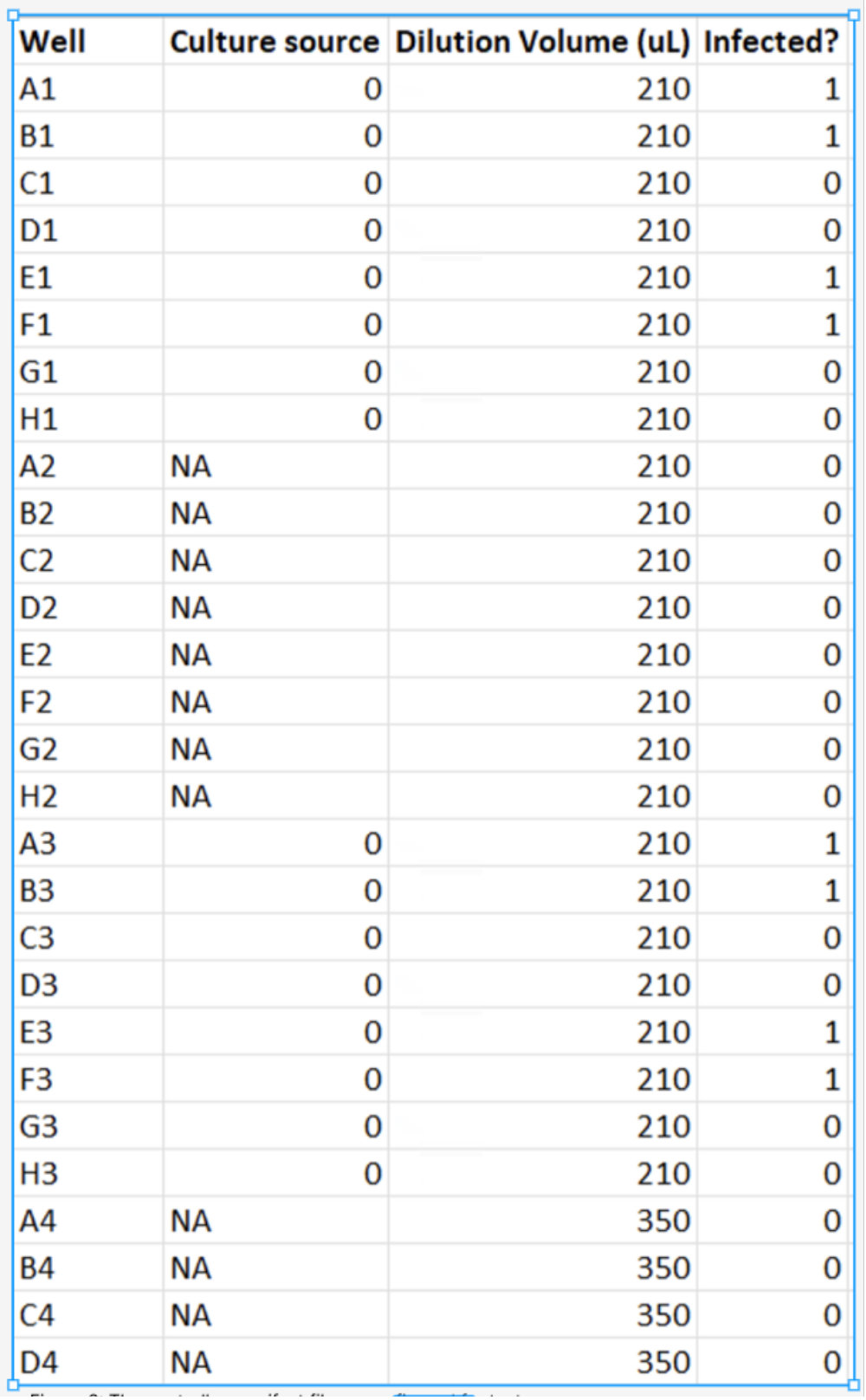
- Denetleyici bildirim dosyasını, program döngüsü başına 96 kuyulu lagünün her bir kuyucuğuna hangi hacmin (aralık 0-500 μL) pompalanacağının ayrıntılarıyla güncelleştirin. Bu, etkili lagün seyreltme oranının hassas bir şekilde kontrol edilmesini sağlar. Bu, Şekil 6'da görülebilir.
- Şekil 2'de görüldüğü gibi DilutionCalculator.xlsx elektronik tablosunu (Ek Dosya 7 olarak sağlanır) kullanarak lagünün Seyreltme oranını hesaplayın.
- robot_method.py dosyasını hedeflenen lagün yüksekliğiyle güncelleştirin. Bu protokolü takip etmek için, programdaki fixed_lagoon_height değişkeni için varsayılan değer olarak 14'ü (milimetre birimi cinsinden) kullanın. Bu, sistemde 550 μL'lik bir lagün hacmine karşılık gelir, ancak kullanılan belirli 96 derin kuyu plakasına bağlı olarak farklılık gösterebilir.
- Temiz filtreli pipet uçlarını belirlenen konumlarında robot güvertesine yerleştirin ve çalışma sırasında dengeyi sağlamak için uç raflarını uç tutuculara bantlayın.
- Temiz 96 derin kuyulu plakaları belirlenen konumlarında robot güvertesine yerleştirin.
- Temiz 96 kuyulu okuyucu plakalarını belirlenen konumlarında robot güvertesine yerleştirin.
- Plaka okuyucu tepsisinin önceden var olan bir plaka tarafından işgal edilmediğinden emin olun.
- Pompaların bilgisayara bağlı olduğundan ve doğru adrese atandığından emin olun.
- Çamaşır suyu ve ardından su pompalamak için pompaları etkinleştirerek pompa hatlarını temizleyin.
- Pompa hatlarını uygun kaynaklara ve çıkışlara bağlayın, doğru hatların ilgili bakteri kültürlerine bağlandığından emin olmak için çok dikkat edin.
- Bakteri haznesi ve pipet ucu yıkama için ağartıcı/su içeren tankları/kovaları yeniden doldurun.
- Güvertedeki tüm bileşenlerin, özellikle hareketli elemanların belirlenen konumlarında sabitlendiğinden emin olun.
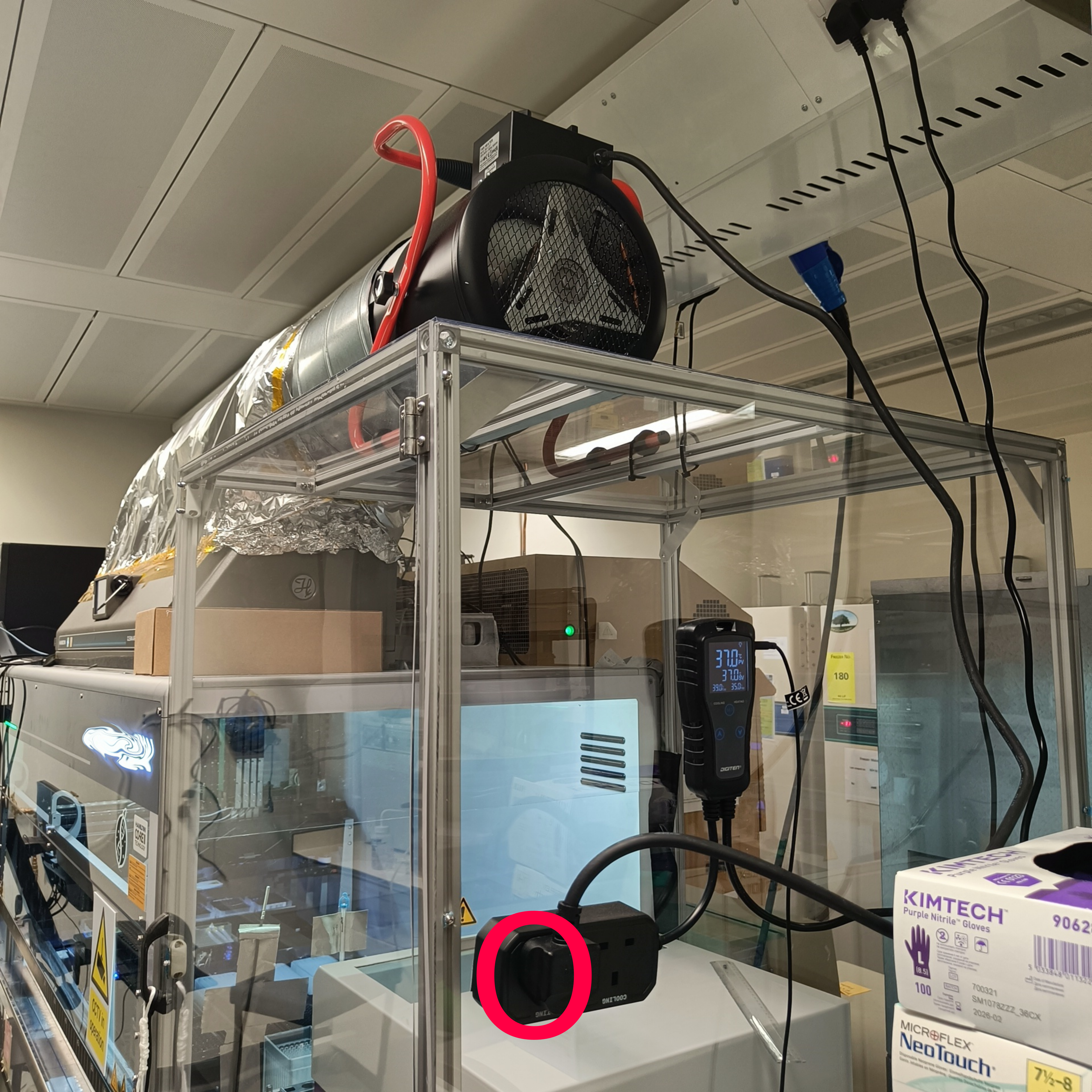
- Isıtıcıları yerel uygulamaya göre hedef sıcaklığa (yani 37 °C; Şekil 8).
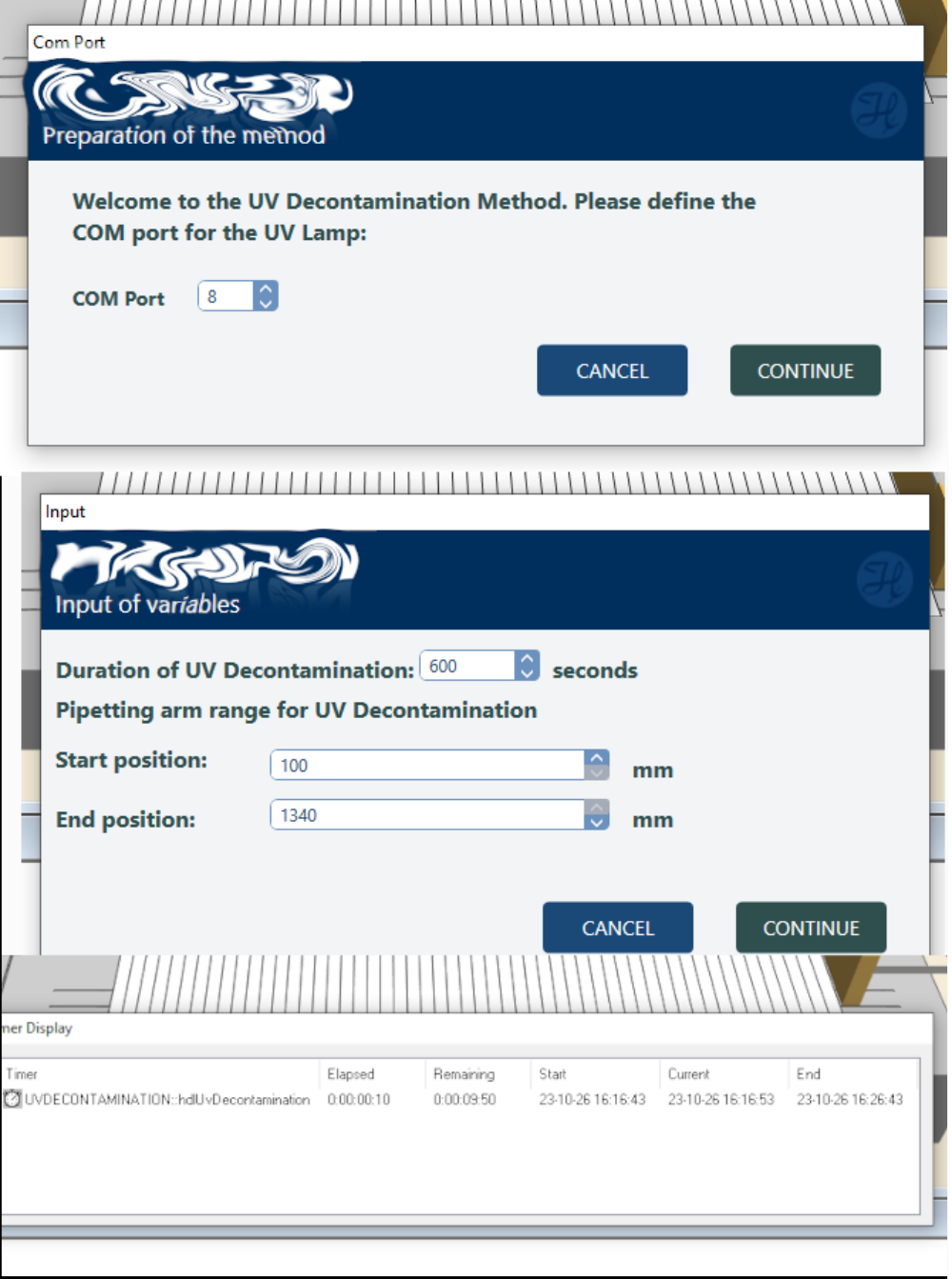
- UV Sterilizasyon Protokolünü çalıştırın file yerleşik UV sterilizasyon lambasını üretici tarafından sağlanan sıvı işleme robotlarında çalıştırmak için 9 dakika boyunca (Şekil 9).
- Program yürütüldüğünde açılacak olan Robot Run Control penceresinin sol üst köşesindeki PLAY düğmesini seçin.
- Dosyayı 600 s boyunca parametrelendirilmiş seçenekle çalıştırın.
- Robot Run Control yazılımının kapalı olduğundan emin olun.
NOT: Run Control yazılımının çalışan mevcut herhangi bir örneği varsa, robot yöntemi programı çökecektir.
4. Donanım ve yazılım entegrasyonu
- PRANCE robot metot programının, tüm kültürler ve ıslak reaktifler yerine su ikame edilerek gece boyunca çalıştırıldığı bir 'su çalışması' gerçekleştirin.
NOT: Bu test oda sıcaklığında yapılabilir.- Şekil 1 ve Şekil 5'da gösterildiği gibi etkili bir lagün seyreltme hızı için controller_manifest ve robot_method kurulumu ile yukarıda ayrıntılı olarak açıklandığı gibi çalışma öncesi hazırlığı tamamlayın.
- Su akışı için log fazındaki bakterileri değiştirmek için 'bakteri girişi' hattını bir su kabına bağlayın.
NOT: Deney boyunca sıvı hareketini izlemek için su kaynaklarına gıda boyası eklenebilir. - Komut Satırını uygun dizinde açın.
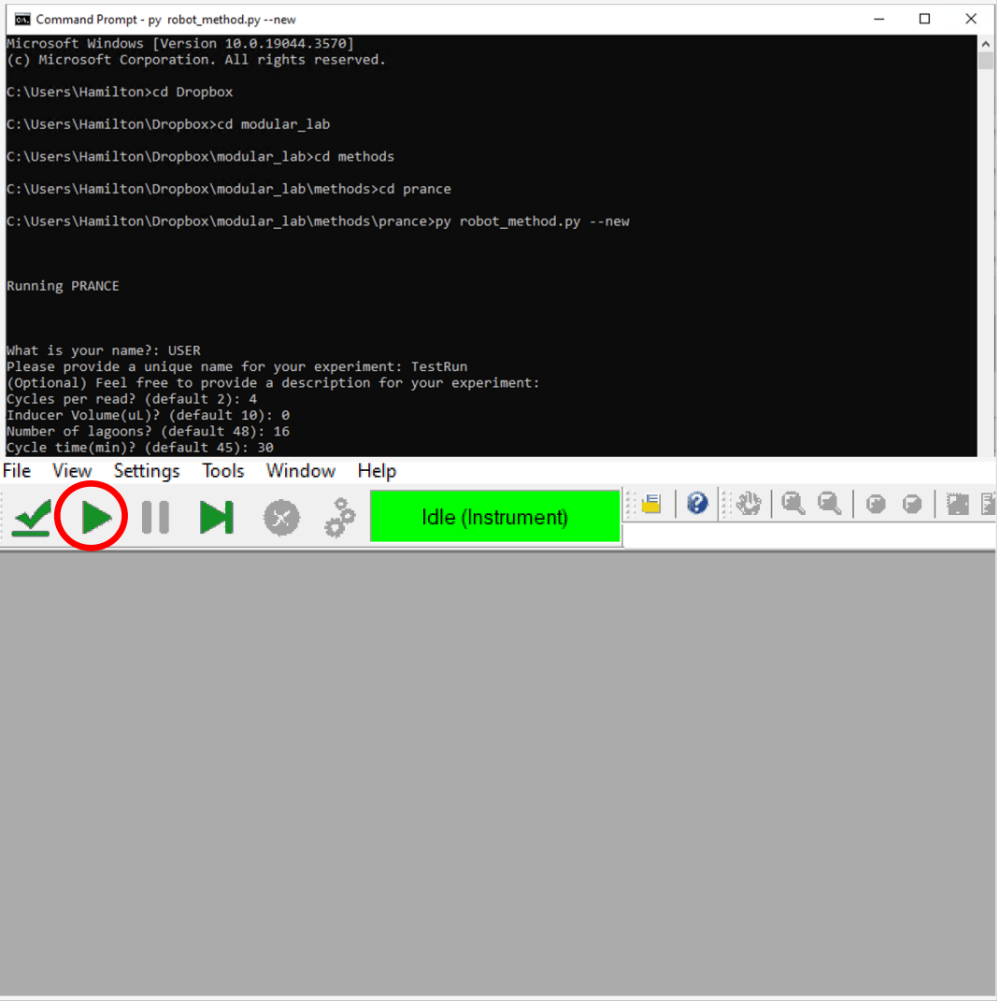
- Python ile robot yöntemi programını yeni çalıştırma bayrağıyla (py robot_method.py --new) çağırın ve günlük dosyası adı (TestRun), lagün kuyusu sayısı (16), döngü süresi (30), okuyucu plakası ölçümü başına döngü sayısı (4) ve indükleyici hacmi (indükleyici hacmi 0'dır ) dahil olmak üzere istenen argümanları girinBu test çalıştırması için μL, mutajenezin arabinoz ile indüklendiği bir evrim sırasında, Şekil 5'te gösterildiği gibi bu değer 10 μL olabilir.
- Argümanlar sağlandıktan sonra program yürütüldüğünde açılacak olan Robot Çalıştırma Kontrolü penceresinin sol üst köşesindeki OYNAT düğmesini seçin.
NOT: PRANCE yöntemi, boş bir lagün plakası kullanılarak başlatılabilir ve lagünlerin sıvı hacmi, ilk altı döngü boyunca nihai hacme dengelenecektir.
- PRANCE protokolünün gece boyunca sadece hedef sıcaklıkta bakteri kültürü ile çalıştırıldığı, ancak bakteriyofaj olmadan çalıştırıldığı bir 'yalnızca bakteri çalışması' gerçekleştirin.
- Şekil 1 ve Şekil 5'da gösterildiği gibi, etkili bir lagün seyreltme oranı için controller_manifest ve robot_method kurulumu ile yukarıda ayrıntılı olarak açıklandığı gibi çalışma öncesi hazırlığı tamamlayın. Isıtıcıların 37 °C hedef sıcaklık için açık olduğundan emin olun.
- 'Bakteri girişi' hattını seçilen log faz bakteri kaynağına bağlayın.
- Komut Satırını uygun dizinde açın.
- Python ile robot yöntemi programını yeni run bayrağıyla (py robot_method.py --new) çağırın ve daha önce bölüm 4.1.4'te ayrıntılı olarak açıklandığı gibi istenen bağımsız değişkenleri girin.
- Argümanlar sağlandıktan sonra program yürütüldüğünde açılacak olan Robot Çalıştırma Kontrolü penceresinin sol üst köşesindeki OYNAT düğmesini seçin.
- Evrimleşmiş bir protein taşıyan fajların, bu proteine ihtiyaç duyan bakteriler üzerinde çoğalmaya zorlandığı bir 'enfeksiyon testi' yapın.
NOT: Hangi lagünlerin fajla aşılanacağına ve hangi lagünlerin aşılanmayacağına önceden karar verin ve böylece çapraz kontaminasyonu tespit etmek için fajsız kontrol lagünleri olarak hizmet edin.- Şekil 1 ve Şekil 5'da gösterildiği gibi, controller_manifest ve robot_method ayarlanmış 5 hacim/saatlik etkili bir seyreltme oranı ile yukarıda ayrıntılı olarak açıklandığı gibi çalışma öncesi hazırlığı tamamlayın. Isıtıcıların 37 °C hedef sıcaklık için açık olduğundan emin olun.
- 'Bakteri girişi' hattını seçilen log faz bakteri kaynağına bağlayın.
- Komut Satırını uygun dizinde açın.
- Python ile robot yöntemi programını yeni run bayrağıyla (py robot_method.py --new) çağırın ve daha önce bölüm 4.1.4'te ayrıntılı olarak açıklandığı gibi istenen bağımsız değişkenleri girin.
- Argümanlar sağlandıktan sonra program yürütüldüğünde açılacak olan Robot Çalıştırma Kontrolü penceresinin sol üst köşesindeki OYNAT düğmesini seçin.
- Bakteriyofaj eklemeden önce, lagün plakalarındaki hacmi ve bakteri OD'sini dengelemek için yöntemi 2-3 saat çalıştırın.
- Program uyurken bir çalışma döngüsünün sonunda fajlı lagünleri 106 pfu/mL bakteriyofaj ile aşılayın (ör., plak tahlili veya qPCR ile belirlendiği gibi 108 pfu/mL'de 5,5 μL faj alikot), 550 μL'lik bir lagüne.
- Programı gece boyunca çalıştırın ve ardından lagün kuyularındaki faj titresini plak testi veya qPCR ile kontrol edin.
Sonuçlar
Enfeksiyon testi sonuçları
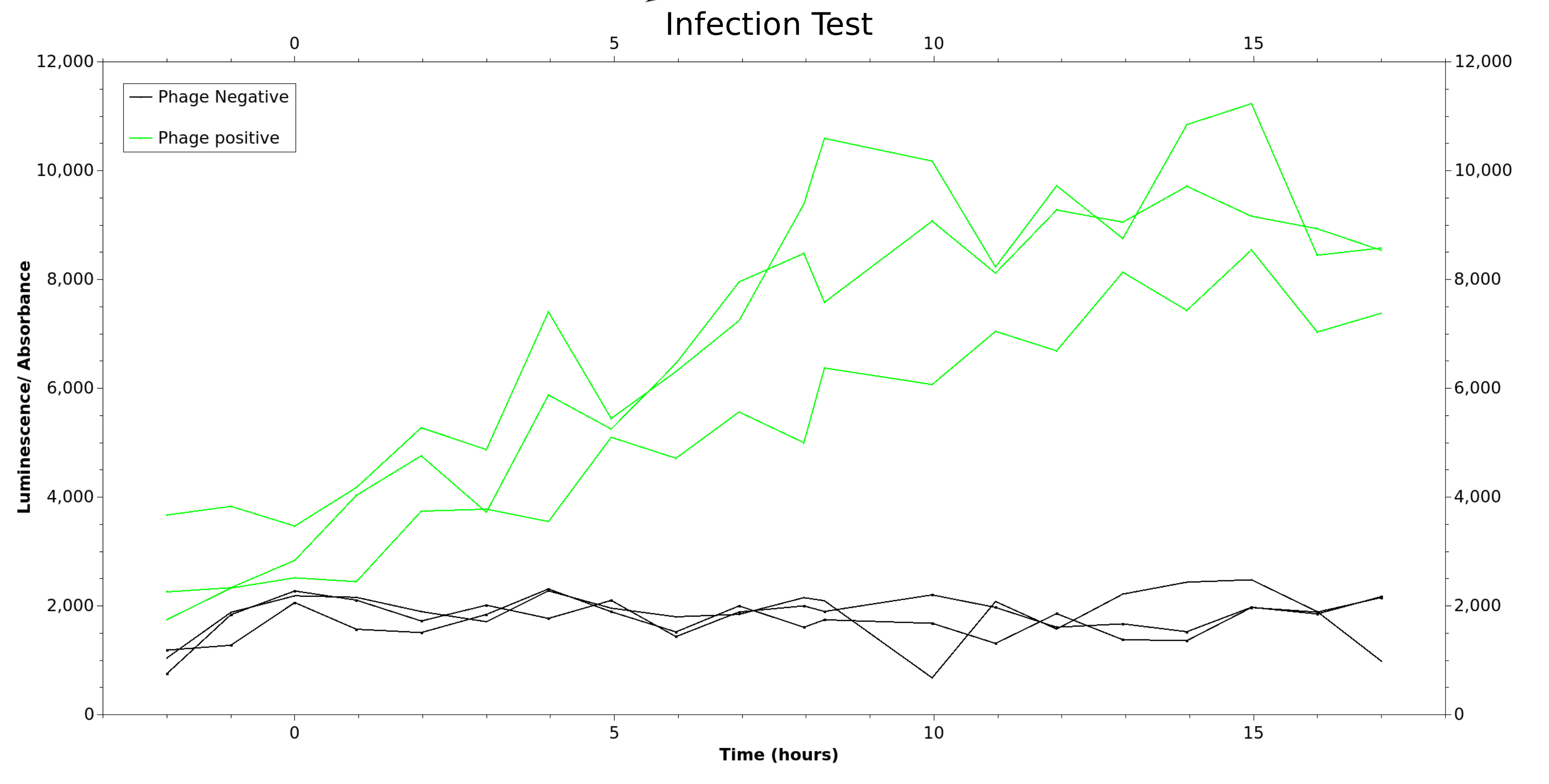
Bu test, bakteri kültürü, faj klonlama ve titre, ekipmanın sıcaklık kararlılığı, sıvı işleme ayarları ve plaka okuyucu entegrasyonu ile ilgili sorunları ortaya çıkaracaktır. Başarılı bir faj enfeksiyonu testi, fajla aşılanmış lagünlerde net ve hızlı faj enfeksiyonunu ortaya çıkaracak ve fajsız lagünlerde sinyal olmadığını ortaya çıkaracaktır. Şekil 10 , bir faj enfeksiyonu testinin bazı temsili sonuçlarını göstermektedir. Deneysel sonuçlar, bir "sıcak PRANCE" (canlı bir bakteri türbidotadı ile beslenir) veya "soğuk PRANCE" (soğutulmuş orta log faz kültürü ile beslenir) konfigürasyonunun uygulanıp uygulanmadığına bağlı olarak, bu PRANCE makalesi8'in Şekil 1d ve 1c ile de karşılaştırılabilir. Bu test birkaç yaygın sorunu ortaya çıkarabilir. Bakteri kültürü hazırlığı ile ilgili sorunlar genellikle zayıf veya eksik enfeksiyona neden olabilir. Bakteriler sadece orta log fazında ve 37 °C'de M13 faj tarafından en iyi şekilde enfekte edilebilir. Diğer sıcaklıklarda ve büyüme aşamalarında, daha zayıf pilus ekspresyonu sergilerler ve bu nedenle faj enfeksiyonuna karşı daha az hassastırlar12. Düşük titreli faj veya omurga mutasyonları olan faj ile aşılama, sinyalin gecikmesine veya yokluğuna neden olabilir. Floresan veya lüminesans için plaka okuyucu kazanç ayarlarıyla ilgili sorunlar bu testle ortaya çıkacaktır.

Şekil 1: PRANCE cihazının enfeksiyon testi çalıştırması sırasında çalışan genetik devrenin şeması. Faj genomunda kodlanan T7 RNA polimeraz, Escherichia coli konakçısını enfekte ettiğinde, kopyalanır ve T7 promotöründeki AP'ye bağlanır, bu da pIII faj proteininin ve luxAB proteininin transkripsiyonuna yol açar ve bu da faj yayılımını ve lüminesans üretimini kolaylaştırır. Kısaltmalar: PRANCE = Faj ve Robotik Destekli Yakın Sürekli Evrim; AP = aksesuar plazmid. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 2: PRANCE sisteminin fiziksel bileşenlerinin şeması. Bir buzdolabı, karıştırılmış kültürleri depolar ve bunlar daha sonra bir dizi pompa tarafından robot güvertesine, bakteri rezervuarına, "waffle"a taşınır. Sıvı işleme robotu, pipetleme kafasını kullanarak bakteri kültürlerini "waffle"dan inkübasyon sıcaklığına kadar ısıtmak için bekletme kuyularına ve ardından ana inkübasyonun gerçekleştiği lagünlere taşımak için kullanılır. Hem bekletme kuyuları hem de lagünler standart 2 mL derin kuyu plakalarıdır. Robot, numuneleri tek kullanımlık okuyucu plakalarına alır ve bunlar da ölçüm için bir plaka okuyucuya taşınır. Kısaltma: PRANCE = Faj ve Robotik destekli Yakın Sürekli Evrim. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

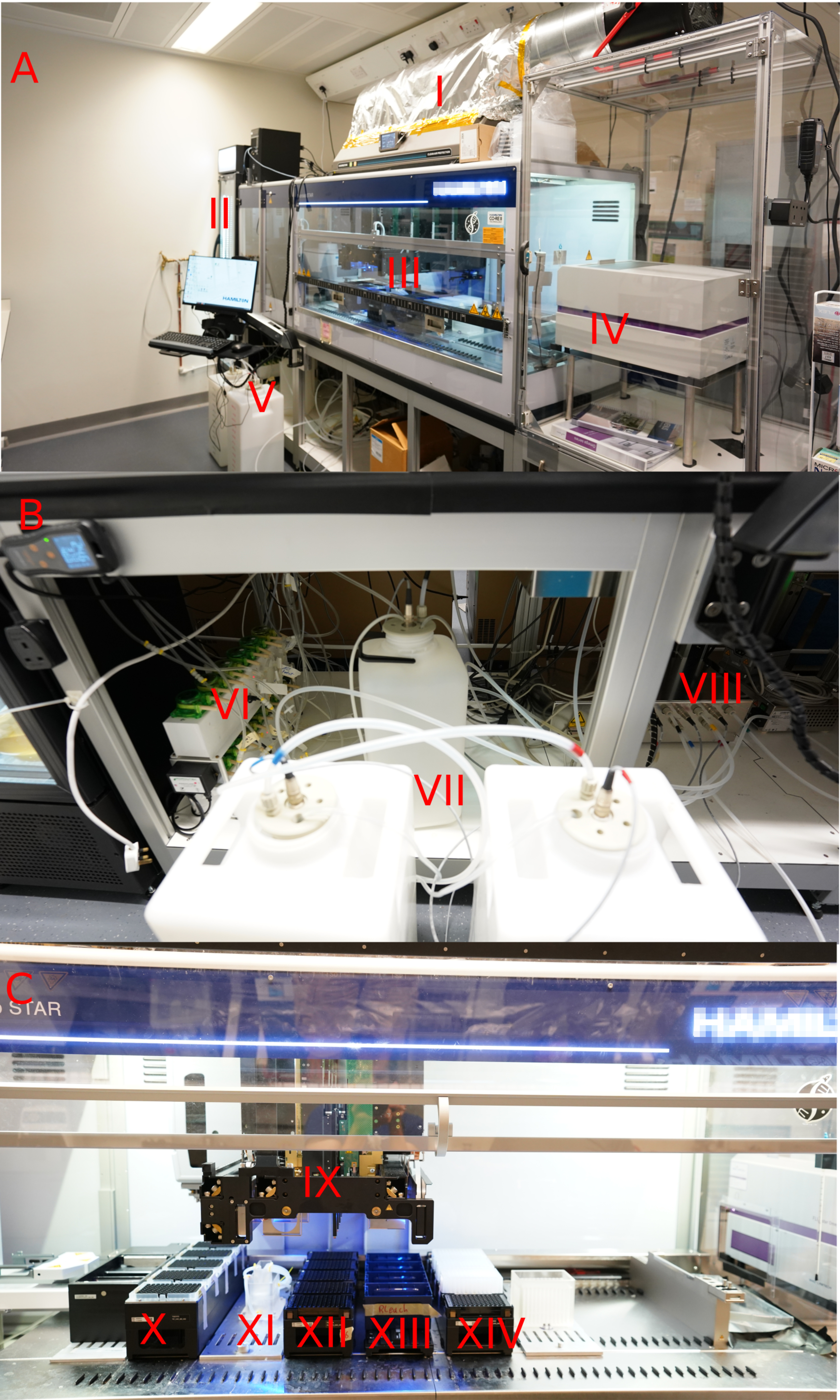
Şekil 3: PRANCE robot aparatı. (A) PRANCE kurulumu. (I) HEPA filtre ve harici ısıtıcı. (II) Kültür buzdolabı. (III) Ana robot muhafazası. (IV) Plaka okuyucu. (V) Pompalar ve tanklar. (B) Robot muhafazası. (VI) Ana kültür pompaları. (VII) Su, atık ve çamaşır suyu tankları. (VIII) Yıkayıcı pompaları. (C) Robot muhafazası. (IX) Robot pipetleme kolu ve tutucu. (X) Pipet uçları. (XI) Robota kültür dağıtımına izin vermek için 3D Baskılı bileşen ("waffle"). (XII) Plaka okuyucuda numune almak için plakalar. (XIII) Uç yıkama kovaları. (XIV) "Lagünler": evrimsel kültürün gerçekleştiği kültür kapları. Kısaltmalar: PRANCE = Faj ve Robotik Destekli Yakın Sürekli Evrim; HEPA = yüksek verimli partikül hava. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

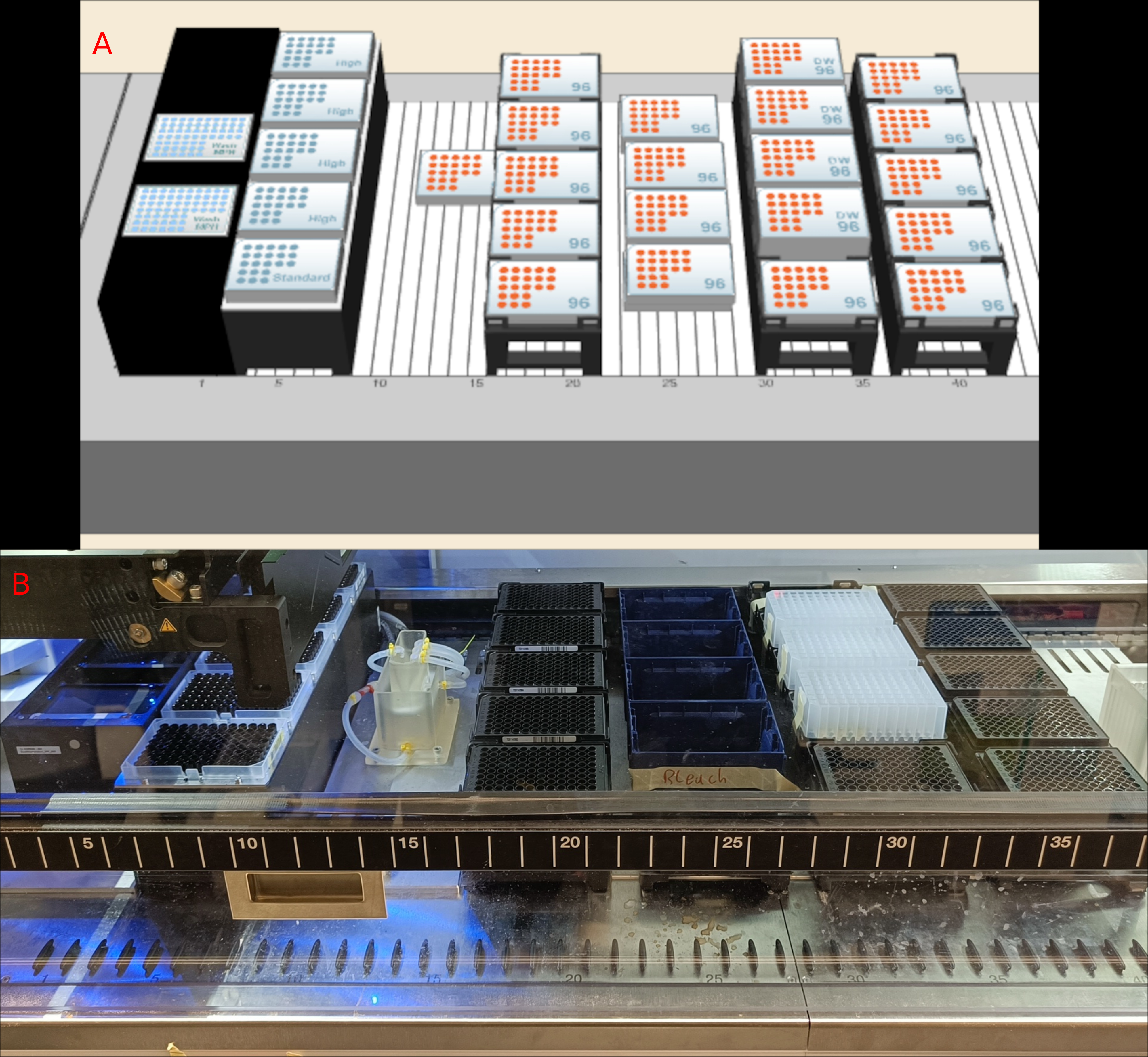
Şekil 4: Güverte Düzeni. (A) Robot kontrol yazılımında güverte düzeninin 3D gösterimi. (B) Güverte bileşenlerinin fotoğrafı. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 5: Örnek parametreler (yukarıda) ve çalıştırma kontrol yazılımı (aşağıda) içeren komut satırının ekran görüntüsü. Oynat düğmesi sol üstte bulunur ve yerel uygulamaya bağlı olarak bir fare ile tıklanabilir veya dokunmatik ekranla çalıştırılabilir. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 6: Test çalıştırmaları için yapılandırılan denetleyici bildirim dosyası. Kültür #0 içeren lagünler, 96 derin kuyu plakasının 1. ve 3. sütunlarında olacaktır. Kalan sütunlar boş olacaktır. 96 derin kuyu plakasının A, B, D ve E satırları faj (1) enfeksiyonu için sağ sütunda işaretlenmiştir, diğer satırlar (0) fajsız kontrollerdir. Denetleyici bildiriminin bu örneği, programın lagünü her döngüde 210 μL kültürle seyreltmesine neden olur. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 7: Seyreltme Hesaplayıcı Elektronik Tablosu kullanılarak etkin lagün seyreltme oranının hesaplanması. DilutionCalculator elektronik tablosu için Ek Dosya 2'ye bakın. Bu şekilde görüldüğü gibi, her 30 dakikalık döngüde bir 210 μL taze kültür ile seyreltilen 550 μL'lik bir lagün, her dört döngüde bir okuyucu plakası ölçümü için 150 μL numune alınırken, 1.0 lagün hacmi/saat'lik etkili bir seyreltme oranına karşılık gelecektir (her 1 saatten sonra, saatin başlangıcındaki orijinal lagün sıvısının %50'si kalacaktır) Bunun daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın şekil.
{kind=link}

Şekil 8: Robot ısıtıcı sistemi. Isıtıcı, kırmızı daire ile gösterildiği gibi güç kaynağına takılarak etkinleştirilir. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 9: UV dekontaminasyon protokolünün ayarları. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}

Şekil 10: PRANCE sisteminde çalıştırılan bir enfeksiyon testinin ölçümü. Çalışma sırasında numuneler alınır ve lüminesans ve absorbans ölçümleri yapılır. Her lagün için, lüminesans ölçümleri karşılık gelen absorbans ölçümüne bölünür ve zamanın bir fonksiyonu olarak çizilir. Faj ile enfekte olmuş lagünler yeşil renkteyken, enfekte olmamış kontrol lagünleri siyah renktedir. Kısaltma: PRANCE = Faj ve Robotik destekli Yakın Sürekli Evrim. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
{kind=link}
Ek Dosya 1: En azından bakteri rezervuarı/dağıtım manifoldu ("waffle") dahil olmak üzere PRANCE sistemi için gerekli özel güverte bileşenlerinin 3D baskısı için STL dosyası. Bu Dosyayı indirmek için lütfen buraya tıklayın.
Ek Dosya 2: DilutionCalculator Elektronik Tablosu. Bu Dosyayı indirmek için lütfen buraya tıklayın.
Tartışmalar
Ekipmanı standartlaştırma çabalarına rağmen, pratik olarak konuşursak, ekipman tedariği, donanım ve yazılım sürümlerindeki değişiklikler nedeniyle her PRANCE kurulumu farklı olacaktır. Sonuç olarak, her PRANCE kurulumu, etkili modüler sorun giderme için her bir bileşenin amacının kapsamlı bir şekilde anlaşılmasını gerektiren benzersiz kurulum zorlukları ortaya çıkarır.
Bu yöntem, kurulu bir PRANCE sisteminin kurulumu ve test edilmesi için adım adım bir protokolü tanımlar. Önce donanım ve yazılımın kritik unsurlarına odaklanıyoruz ve ardından sistemin PRANCE için hazır olduğunu belirleyen bir dizi test çalışmasına hazırlanmak ve yürütmek için gerekli adımları detaylandırıyoruz.
Donanımın önemli bir özelliği, bakteriyofaj kullanılarak yapılan çoğullanmış deneyler sırasında numunenin çapraz kontaminasyon riskini azaltmak için optimizasyondur. Ucun yeniden kullanımı ile uyumlu olan ve zorla takılan uçlardan kaçınarak uç çıkarma sırasında oluşan aerosolleri en aza indirdiği düşünülen robot uç teknolojisine sahip özel filtreli uçların kullanılması tavsiye edilir. Bu protokole göre sağlam uç yıkama, ucun yeniden kullanılmasına izin verir, ancak bunun yeterliliği her sistemdeki enfeksiyon testinin bir parçası olarak doğrulanmalıdır. Kendi kendine sterilizasyon ayrıca sistem için tutarlı bir su ve ağartıcı kaynağına da bağlıdır. Bunlar tanklarda/kovalarda depolanır ve tükenirse kendi kendine sterilizasyonun bozulmasına ve hızlı çapraz kontaminasyona neden olur. Belirli bir pompa kurulumu göz önüne alındığında, yıkama ekipmanının su ve çamaşır suyu tüketme oranını karşılaştırmak için program çalışmadan önce ve sonra çekilen tankların/kovaların fotoğrafları çekilebilir.
Sistemin bir diğer önemli unsuru, bakteri üreme aşamasının ve sıcaklığının korunmasıdır. PRANCE deneyleri, S2060 E. coli bakteri suşu (Addgene: #105064) kullanılarak gerçekleştirilmiştir. Bu, biyofilmleri azaltmak için optimize edilmiş K12'den türetilmiş F-plazmid içeren bir suştur7. Ek olarak, bu suştaki F-plazmid, plazmit bakımı için bir tetrasiklin direnç kaseti, luxAB aracılı lüminesans izlemeyi tamamlamak için luxCDE ve luxR ve ayrıca plakların kolorimetrik görselleştirilmesine izin vermek için faj şok promotörü altında lacZ eklenerek düzenlenmiştir. F-plazmid kodlu F-pilus, M13 faj enfeksiyonu için gereklidir. Bu nedenle PACE'de kullanılan bakteriler 37 °C'de ve F-pilus12'nin eksprese edildiği ve M13 faj enfeksiyonu, çoğalması ve evriminin mümkün olduğu orta log fazında kültürlenmelidir. Statik sıcaklık regülasyonu için, kullanıma hazır ısıtmalı bir plaka taşıyıcı kullanılabilir. Bir alternatif, HEPA filtreye giren havayı ucuz ısıtıcılar kullanarak ısıtmaktır, ancak bu, donanımda daha hızlı aşınma ve yıpranmaya yol açabileceğinden önerilmez. Ayrıca bu, kullanıldığında ağartıcı/su kovaları ve indükleyici gibi yardımcı güverte sıvılarının buharlaşmasını hızlandırır.
Sistemin düzgün çalışması için yazılım paketlerinin kalibrasyonu da gereklidir. Yazılım güvertesi düzeni ile gerçek robot güvertesi arasındaki farklılıklar, çalışma sırasında sistem arızasının en yaygın nedenidir. Peristaltik pompa kullanımı boru aşınmasına ve sıvı hacmi değişikliklerine yol açabileceğinden, bakteri kültürü, ağartıcı ve sistemi boşaltan yardımcı pompaların düzenli kalibrasyonu hayati önem taşır.
Su çalıştırma testi, yanlış sıvı işleme ayarları, akışkan sızıntıları/hatalı bağlantılar ve yazılım kararsızlığı dahil olmak üzere bir dizi yaygın kurulum sorununu hızla ortaya çıkaracaktır. Başarılı bir su akışı, beklenmedik sıvı sızıntıları göstermez ve gece boyunca hatasız bir şekilde çalışır. Belirli sıvı işleme adımlarının gerçekleştirilmemesi, pipetlerden damlama ve protokolün çalışmanın ortasında durması gibi bir su akışı sırasında ortaya çıkabilecek bir dizi yaygın sorun vardır. Belirli sıvı işleme adımlarının gerçekleştirilememesi durumunda, tüm sıvı sınıflarının kurulduğunu onaylayın. Bunlar, uygun viskozite ve pipetleme hızlarını listeler ve üretici tarafından sağlanan robot kontrol yazılımında ayarlanır. Pipetlerden damlama oluyorsa, temiz pipetleme sağlamak ve faj çapraz kontaminasyonunu ortadan kaldırmak için robot pipetleme kolu ayarlarının doğru olması önemlidir. Başarılı robotik pipetleme, doğru sıvı sınıflarına ek olarak, tüm laboratuvar gereçlerinin doğru güverte yerleşimi yüksekliklerini ve PRANCE robot metot programında belirtilen uygun pipetleme yüksekliği ofsetlerini gerektirir. Bu yükseklik ofsetleri doğrudan ayarlama gerektirebilir. Protokol çalışmanın ortasında durursa, bu genellikle deste yerleşim dosyasının gerçek deste yapılandırmasıyla eşleşmeyebileceğini gösteren çok çeşitli hatalar tarafından oluşturulur.
Yalnızca bakterilerle çalıştırma testi, plaka okuyucu ayarları ve gerçek zamanlı veri görselleştirme ile ilgili sorunları, aşırı ağartıcı konsantrasyonu veya yetersiz durulama ile ilgili sorunları ve sıcaklık kararlılığını ortaya çıkaracaktır. Başarılı bir sadece bakteri çalışması, ilk üç döngü boyunca lagün absorbansının dengelenmesini ve ardından çalışma süresi boyunca stabil absorbans sergileyecektir. Ek olarak, birkaç yaygın sorunu ortaya çıkarabilir. Bu, plaka okuyucu tarafından üretilen verilerin çizildiği ilk adımdır. Plaka okuyucu veri tabanındaki veriler düzgün bir şekilde kaydedilemeyebilir veya düzgün bir şekilde çizilemeyebilir. Bakteriler absorbanslarında dengelenemezse, bu ağartıcı konsantrasyonunun çok yüksek olduğunu gösterebilir. Aşırı çamaşır suyu veya yetersiz yıkama, sadece laboratuvar gereçlerini değil, tüm deneyi sterilize edebilir. Bundan şüpheleniliyorsa, lagünü test etmek için ağartıcı tespit şeritleri kullanılabilir. Kültürün sıcaklığının stabilitesi bir termometre tabancası ile kontrol edilebilir.
Başarılı bir enfeksiyon testi, sistemin PRANCE çalıştırmaları için hazır olduğunu gösterir. Bakteri kültürü içeren bir lagün alt kümesi aşılanarak bir enfeksiyon testi yapılabilir. Bu bakteriler, pIII (ΔgIII) geninden yoksun olan uygun faj tarafından enfekte edildiğinde pIII eksprese edecek ve faj yayılımına izin verecektir. Test için olası bir kombinasyon, herhangi bir ΔgIII faj ile faj şok promotörü altında pIII eksprese eden bir plazmit ile dönüştürülmüş S2060 bakterilerinin kullanılmasıdır. Şekil 1'de gösterildiği gibi, pIII ve luxAB'nin T7 promotörü (Plazmid pJC173b13) tarafından yönlendirildiği bir aksesuar plazmid ile dönüştürülmüş S2060 bakterili vahşi tip T7 RNA Polimerazı taşıyan ΔgIII fajın kullanılmasını öneririz. Bu aynı zamanda test çalıştırması sırasında enfeksiyonun plaka okuyucu aracılı izlenmesine de izin verir. Enfeksiyon testinin başarısının ve çapraz kontaminasyon eksikliğinin kesin kanıtı, test ve kontrol lagünlerinin faj titresinden gelecektir. Bir lusiferaz raportörünün kullanıldığı durumlarda, Şekil 3'te görüldüğü gibi, yalnızca test kuyularında lüminesansta bir artış, aynı zamanda başarılı faj enfeksiyonu ve yayılımının bir göstergesidir. Faj titresi ölçümü için altın standart plak testi7'dir. Ayrıca, qPCR7 ile M13 miktar tayini için daha hızlı olabilen bir protokol vardır, ancak bu, enfeksiyöz ve enfeksiyöz olmayan faj partikülleri arasında ayrım yapmaz ve bu nedenle titreleri abartabilir.
Ana program bir bildirim dosyasına atıfta bulunur, bu, yayılan her kültürün döngüsü başına seyreltme hacminin yanı sıra, seçim sıkılığında farklılık gösterebilen herhangi bir sayıda potansiyel bakteri kültürü hammaddesinin seçimini belirleyen düz bir metin veritabanı dosyasıdır. Bu şekilde, bildirim dosyası PRANCE çalıştırmasının birçok parametresini tanımlar. Bu dosyanın çalışma sırasında operatör veya sistem tarafından düzenlenebileceği, yani manuel veya otomatik geri besleme kontrolünün gerçekleştirilebileceği unutulmamalıdır.
Tam işlevli bir PRANCE kurulumunun faydası, dikkatle izlenen ve kontrol edilen bir ortamda büyük popülasyonları hızla geliştirme kapasitesinde yatmaktadır. Plaka tabanlı format, PRANCE'i daha küçük kullanıma hazır türbidostat tabanlı sistemlerkullanmak gibi diğer tekniklerden ayırır 14,15. Plaka tabanlı kurulum, yalnızca ek robotik işleme adımlarıyla kolay entegrasyonu sağlamakla kalmaz, aynı zamanda santrifüjler gibi diğer laboratuvar cihazlarıyla uyumluluğu da kolaylaştırır. Ayrıca, birden fazla örnekte aynı anda hızlandırılmış evrim yürütme yeteneği, deneye ek bir boyut getirerek çeşitli ve sağlam sonuçlar elde etme olasılığını artırır. PRANCE'ın ayrılmaz bir parçası olan granüler kontrol ve geri bildirim sistemi, deneyin öngörülebilirliğini ve güvenilirliğini daha da güçlendirerek yönlendirilmiş evrim teknikleri alanında önemli bir ilerlemeye işaret ediyor. Bununla birlikte, bu teknik, yapabileceği paralel deneylerin sayısı bakımından sınırlıdır. Konfigürasyona bağlı olarak, PRANCE kurulumları genellikle robot pipetleme hızı veya mevcut güverte alanı ile sınırlıdır.
PRANCE için kullanılan aynı donanım ve yazılım, bakteriyofaj içermeyen evrim yöntemlerine de uygulanabilir. Çoklu-türbidostat yöntemi11'de gösterildiği gibi, aynı cihaz sadece bakterilerle kullanılabilir ve tüm genom adaptif evrim deneylerini mümkün kılar. Bu uyarlanabilirlik, bu aracın kapsamını genişleterek Robotik hızlandırılmış Evrimin yeni biçimlerinin önünü açıyor.
Açıklamalar
Yazarların ifşa edecek herhangi bir ihtilafı yoktur.
Teşekkürler
Emma Chory ve Kevin Esvelt'e donanım ve yazılım kurulumundaki yardımları ve tavsiyeleri için teşekkür ederiz. Samir Aoudjane, Osaid Ither ve Erika DeBenedictis, Steel Perlot Early Investigator Grant tarafından destekleniyor. Bu çalışma, temel finansmanını Cancer Research UK (CC2239), UK Medical Research Council (CC2239) ve Wellcome Trust'tan (CC2239) alan Francis Crick Enstitüsü tarafından desteklenmiştir.
Malzemeler
| Name | Company | Catalog Number | Comments |
| 3D printed bacterial reservoir "waffle" | - | - | https://drive.google.com/file/d/16ELcvfFPzBzNSto0xUrBe-shi23J9Na7/view; For Robot deck |
| 3D printer | FormLabs | Form 3B+ | 3D printer components |
| 3D printer resin (clear) | FormLabs | RS-F2-GPCL-04 | consumable for 3D printer |
| 8-1,000 µL head | Hamilton | 10140943 | For Liquid handling robot |
| 96-1,000 µL pipetting head | Hamilton | 10120001 | For Liquid handling robot |
| Black polystyrene plate reader microplates | Millipore Sigma | CLS3603 | For Robot deck |
| BMG Labtech Spectrostar FLuorstar Omega | BMG Labtech | 10086700 | For Liquid handling robot |
| Cleaning solution | Fluorochem Limited | F545154-1L | used to clean the liquid handling parts of the robot |
| Deep Well plates | Appleton Woods | ACP006 | these are used to contain evolving bacteria on the deck of the robot |
| encolsure heater | Stego | 13060.0-01 | heats inside robot enclosure |
| Hamilton STAR | Hamilton | 870101 | For Liquid handling robot |
| Heater | Erbauer | BGP2108-25 | For Liquid handling robot |
| HIG Bionex centrifuge | Hamilton | 10086700 | For Liquid handling robot |
| iSWAP plate gripper | Hamilton | 190220 | For Liquid handling robot |
| laboratory tubing | Merck | Z280356 | to construct liquid handling manifold |
| luer to barb connector | AIEX | B13193/B13246 | for connectorizing tubing |
| Magnetic stir plate | Camlab | SKU - 1189930 | For Auxiliary Fridge |
| Molcular pipetting arm | Hamilton | 173051 | For Liquid handling robot |
| Omega | BMG labtech | 5.7 | plate reader control software |
| One way Check Valves | Masterflex | MFLX30505-91 | to one way sections of liquid handling manifold |
| pyhamilton | MIT/Open source | https://github.com/dgretton/std-96-pace%20PRANCE | open source python robot control software |
| pymodbus | opensource | 3.5.2 | python pump software interface |
| Refrigetator | Tefcold | FSC175H | allows cooled bacteria to be used instead of turbidostat |
| S2060 Bacterial strain | Addgene | Addgene: #105064 | E. coli |
| temperature controller | Digiten | DTC102UK | Used to control heaters thermostatically |
| Thermostat switch controller | WILLHI | WH1436A | WILLHI WH1436A 10 A Temperature Controller 110 V Digital Thermostat Switch Sous Vide Controller NTC 10K Sensor Improved Version; for Liquid handling robot |
| Venus | Hamilton | 4.6 | proprietary robot control software |
| Wash Station for MPH 96/384 | Hamilton | 190248 | For Liquid handling robot |
| Suggested pump manufacturers | |||
| Company | Catalog number | Notes | Documentation |
| Agrowtek | AD6i Hexa Pump | https://www.agrowtek.com/doc/im/IM_ADi.pdf | |
| Amazon | INTLLAB 12V DC | ||
| Cole-Parmer | EW-07522-3 | Masterflex L/S Digital Drive, 100 RPM, 115/230 VAC | https://pim-resources.coleparmer.com/instruction-manual/a-1299-1127b-en.pdf |
| Cole-Parmer | EW-07554-80 | Masterflex L/S Economy variable-speed drive, 7 to 200 rpm, 115 VAC | https://pim-resources.coleparmer.com/instruction-manual/a-1299-1127b-en.pdf |
Referanslar
- Esvelt, K. M., Carlson, J. C., Liu, D. R. A system for the continuous directed evolution of biomolecules. Nature. 472, 499-503 (2011).
- Pu, J., Zinkus-Boltz, J., Dickinson, B. C. Evolution of a split RNA polymerase as a versatile biosensor platform. Nat Chem Biol. 13 (4), 432-438 (2017).
- Pu, J., Disare, M., Dickinson, B. C. Evolution of C-terminal modification tolerance in full-length and split T7 RNA polymerase biosensors. Chembiochem. 20 (12), 1547-1553 (2019).
- Xie, V. C., Styles, M. J., Dickinson, B. C. Methods for the directed evolution of biomolecular interactions. Trends Biochem Sci. 47 (5), 403-416 (2022).
- Popa, S. C., Inamoto, I., Thuronyi, B. W., Shin, J. A. Phage-assisted continuous evolution (PACE): A guide focused on evolving protein-DNA interactions. ACS Omega. 5 (42), 26957-26966 (2020).
- Wang, T., Badran, A. H., Huang, T. P., Liu, D. R. Continuous directed evolution of proteins with improved soluble expression. Nat Chem Biol. 14 (10), 972-980 (2018).
- Miller, S. M., Wang, T., Liu, D. R. Phage-assisted continuous and non-continuous evolution. Nat Protoc. 15 (12), 4101-4127 (2020).
- DeBenedictis, E. A., et al. Systematic molecular evolution enables robust biomolecule discovery. Nat Methods. 19 (1), 55-64 (2022).
- Zhong, Z., et al. Automated continuous evolution of proteins in vivo. ACS Synth Biol. 9 (6), 1270-1276 (2020).
- Roth, T. B., Woolston, B. M., Stephanopoulos, G., Liu, D. R. Phage-assisted evolution of Bacillus methanolicus methanol dehydrogenase 2. ACS Synth Biol. 8 (4), 796-806 (2019).
- Chory, E. J., Gretton, D. W., DeBenedictis, E. A. Enabling high-throughput biology with flexible open-source automation. Mol Syst Biol. 17 (3), 9942(2021).
- Novotny, C. P., Lavin, K. Some effects of temperature on the growth of F pili. J Bacteriol. 107 (3), 671-682 (1971).
- Carlson, J. C., Badran, A. H., Guggiana-Nilo, D. A., Liu, D. R. Negative selection and stringency modulation in phage-assisted continuous evolution. Nat Chem Biol. 10 (3), 216-222 (2014).
- Steel, H., Habgood, R., Kelly, C., Papachristodoulou, A. In situ characterization and manipulation of biological systems with Chi.Bio. PLOS Biology. 18 (7), e3000794(2020).
- Wong, B. G., Mancuso, C. P., Kiriakov, S., Bashor, C. J., Khalil, A. S. Precise, automated control of conditions for high-throughput growth of yeast and bacteria with eVOLVER. Nat Biotechnol. 36 (7), 614-623 (2018).
Yeniden Basımlar ve İzinler
Bu JoVE makalesinin metnini veya resimlerini yeniden kullanma izni talebi
Izin talebiDaha Fazla Makale Keşfet
This article has been published
Video Coming Soon
JoVE Hakkında
Telif Hakkı © 2020 MyJove Corporation. Tüm hakları saklıdır