
Method Article
Fabricación y pruebas de equipos de captura fotoforética automática en miniatura
En este artículo
Resumen
Este trabajo describe y caracteriza la fabricación de plataformas de captura fotoforética automática en miniatura.
Resumen
Este artículo presenta un banco de pruebas de trampa fotoforética automatizado, compatible con la fabricación rápida para permitir la democratización y el crowdsourcing de la investigación de pantallas volumétricas. El equipo se puede construir en 2 horas utilizando un cortador láser, una impresora tridimensional (3D) y herramientas manuales comunes. En su forma actual, la plataforma se puede utilizar para probar los siguientes parámetros críticos: tipo de partícula, tipo de trampa, apertura numérica y flujo de aire a una velocidad de aproximadamente 250 muestras por hora. Con una modificación menor, la plataforma se puede hacer para probar un conjunto aún mayor de parámetros, como la potencia del láser y la longitud de onda del láser, dependiendo de las necesidades del usuario. La plataforma puede utilizar la visión artificial para la captura y el análisis automatizados de datos. El funcionamiento y la construcción del banco de pruebas se describen con pasos concisos y fáciles de seguir. Se informan los resultados de una "granja" de banco de pruebas de cuatro unidades que cubre los parámetros de potencia y tipo de partícula. Esta plataforma ampliará el alcance y la composición de los parámetros de visualización de trampas ópticas y los investigadores a través de la accesibilidad y la democratización.
Introducción
La pantalla de trampa óptica (OTD) hace posible las geometrías de visualización vistas en la ciencia ficción. Funciona atrapando una partícula a través de la fotoféresis e iluminando la partícula1,2,3,4. Luego, arrastrar esa partícula a través del espacio forma una imagen en el aire que el espectador percibe como continua según la persistencia de la visión5. Esta tecnología 3D sin pantalla le permite mostrar geometrías como proyecciones de largo alcance, mesas de arena altas y pantallas envolventes1. Estas geometrías son excepcionalmente atractivas porque no requieren pantalla y crean contenido que se puede ver desde prácticamente todos los ángulos.
Investigadores de la Universidad Brigham Young encontraron el éxito inicial en su sistema de captura fotoforética de primera generación mediante el uso de un expansor de haz y escáneres de galvanómetro, junto con varios espejos y una o más lentes esféricas para crear una trampa fotoforética a través de la aberración esférica1,4. Esta plataforma de captura de primera generación también contenía láseres RGB (rojo-verde-azul) para permitir una iluminación precisa de la pantalla en color. Usando este sistema de captura, los OTD se crean moviendo una sola partícula a través de un camino enrevesado. Este enfoque limita el tamaño de las imágenes a menos de un centímetro cúbico y limita la complejidad de las imágenes en tiempo real a wireframes y otros contenidos dispersos6,7. Además, el escalado de esta tecnología está limitado por la inconsistencia del atrapamiento fotoforético8. Si se puede optimizar un solo sistema de trampa/partícula, se podría escalar la pantalla replicando una trampa optimizada y atrapando y escaneando sincrónicamente múltiples partículas9. Cualquier problema con una sola trampa se agravará en un sistema de trampa múltiple, por lo que la optimización cuidadosa de los parámetros de trampa y partículas es crítica.
La optimización de un sistema de trampa/trampeo individual requiere que se realicen pruebas exhaustivas para cada parámetro del sistema de captura fotoforética7. Tales parámetros incluyen el tipo de partícula (sustancia, forma, tamaño), la potencia del láser, la longitud de onda del láser y la apertura numérica (distancia focal, diámetro, inclinación). Las pruebas y la experimentación a través de prueba y error para cada parámetro optimizarán las trampas individuales y las trampas síncronas múltiples. Aún así, requerirán que se recopilen grandes cantidades de datos.
En el pasado, el proceso de investigación y prueba para optimizar el atrapamiento fotoforético a través de la aberración esférica solo ha sido realizado por un puñado de investigadores en todo el mundo1,2,3,4,5,6,7,8,9,10 . Hasta hace poco, los investigadores de la Universidad Brigham Young se han basado en un único, grande y costoso sistema de captura para recopilar los datos necesarios, lo que hizo que el proceso de prueba y recopilación de datos fuera lento1,7. Sin embargo, desde la introducción de las pantallas de trampas ópticas como una solución para la visualización 3D en 20181, personas de todos los grupos de edad y de varios continentes han expresado su deseo de participar en la investigación. Debido al interés generado en los OTD, los investigadores han querido encontrar una manera de permitir que todas las partes interesadas participen en el proceso de investigación. Las generaciones anteriores de plataformas de captura fotoforética, que contenían divisores de haz y galvanómetros, eran demasiado caras y lentas para producir en masa y crowdsource1,6, por lo que se necesitaba una solución diferente.
Se ha desarrollado una nueva plataforma de captura fotoforética en miniatura, que permite a todas las partes interesadas participar en la investigación y probar y recopilar rápidamente datos para todos los parámetros significativos mencionados anteriormente. Pueden ser fabricados rápidamente por cualquier persona que tenga acceso a una impresora 3D y un cortador láser. Este diseño intenta minimizar el costo y la complejidad, mitigar el riesgo y maximizar la automatización, la interconectividad y la flexibilidad (Figura 1). El nuevo equipo emplea la configuración óptica más sencilla posible para el atrapamiento fotoforético: un solo láser y una lente10. Las plataformas pequeñas son fáciles de usar una vez configuradas y pueden probarse a una velocidad de aproximadamente 250 intentos por hora.
Los datos recopilados de estos equipos de las pruebas de futuros científicos e investigadores ciudadanos ayudarán significativamente a desarrollar el atrapamiento fotoforético en su uso para la visualización 3D al permitir la optimización de los parámetros de captura y las trampas individuales.
Protocolo
1.3D impresión y corte por láser de los materiales requeridos
- Imprima en 3D los materiales que se enumeran a continuación
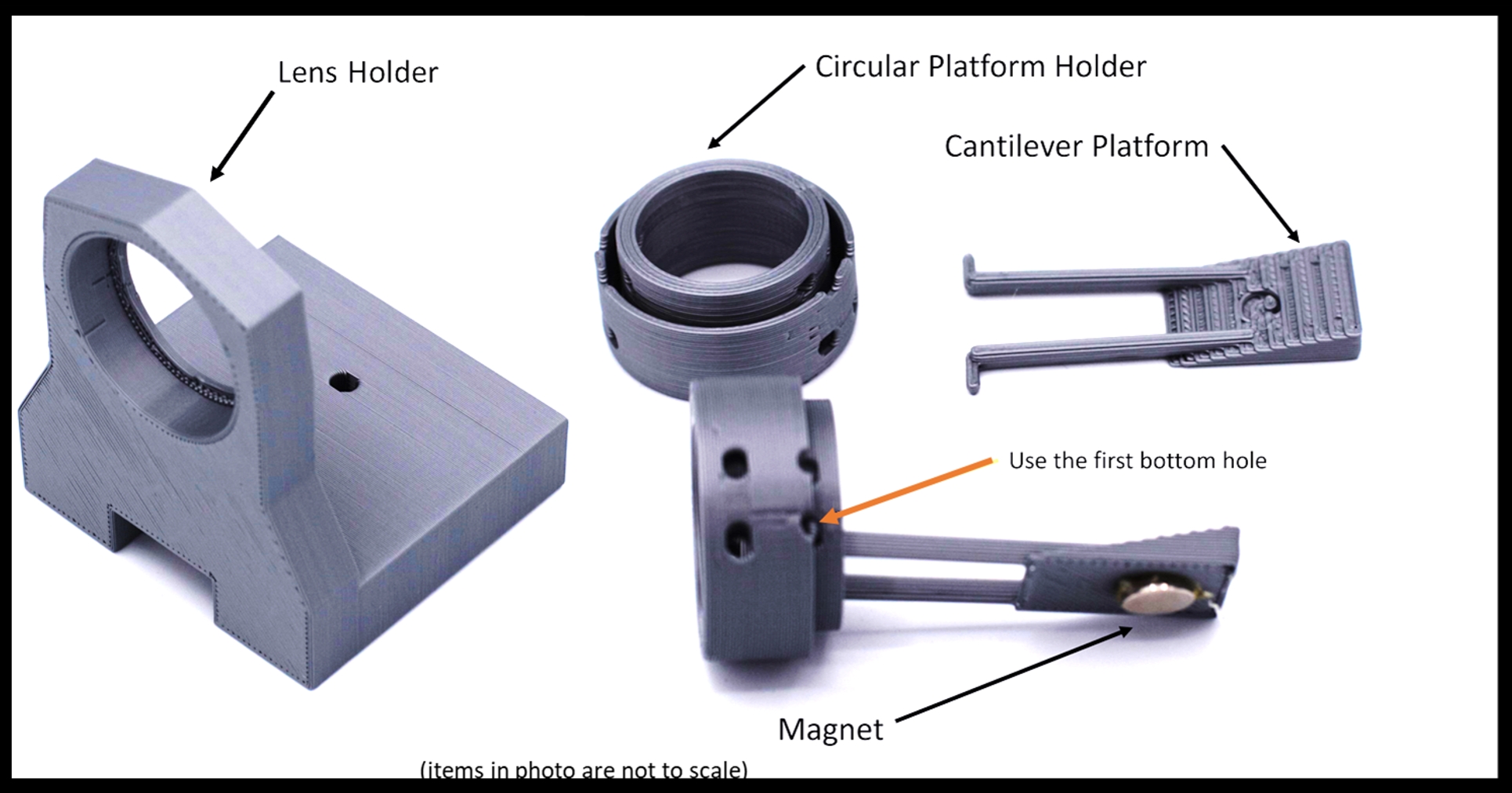
- Imprima el soporte de la lente utilizando una impresora 3D FDM (modelado por deposición fundida) de filamento (consulte la Tabla de materiales) según la información proporcionada en el Archivo complementario 1. Este soporte de lente es para una lente de 30 mm (diámetro) (Figura 2).
NOTA: El archivo se puede personalizar fácilmente para adaptarse a otras lentes. - A continuación, imprima la plataforma en voladizo y el soporte (Figura 2) (Archivo Complementario 2 y Archivo Complementario 3).
NOTA: Esto puede tomar ~ 2-14 h, dependiendo del detalle de las impresiones. El detalle de las impresiones no debe afectar a la velocidad de captura si se ha colocado suficiente sustancia de captura (paso 5.3.4).
- Imprima el soporte de la lente utilizando una impresora 3D FDM (modelado por deposición fundida) de filamento (consulte la Tabla de materiales) según la información proporcionada en el Archivo complementario 1. Este soporte de lente es para una lente de 30 mm (diámetro) (Figura 2).
- Usando un cortador láser 3D (ver Tabla de Materiales), recorte las piezas de la plataforma (Figura 3) (Archivo Suplementario 4-5).
NOTA: Este corte se puede hacer en cualquier material de un cuarto de pulgada de espesor, pero la madera es el material recomendado. El archivo complementario 4 contiene las piezas de plataforma requeridas que caben en una pieza de madera de 12 x 12 pulgadas. El archivo complementario 5 incluye un protector/bloqueador de luz opcional. - Usando un cortador de vidrio (ver Tabla de Materiales), corte un tubo de ensayo estándar (~ 2.5 cm de diámetro) aproximadamente por la mitad para que la mitad con dos extremos abiertos tenga ~ 6.5 cm de largo.
2. Montaje de los equipos de madera
NOTA: Al ensamblar la plataforma de madera, las instrucciones en los pasos 2.1 -2.5 pueden decir "deslizamiento", pero las piezas pueden requerir más fuerza para colocarse y construirse adecuadamente.
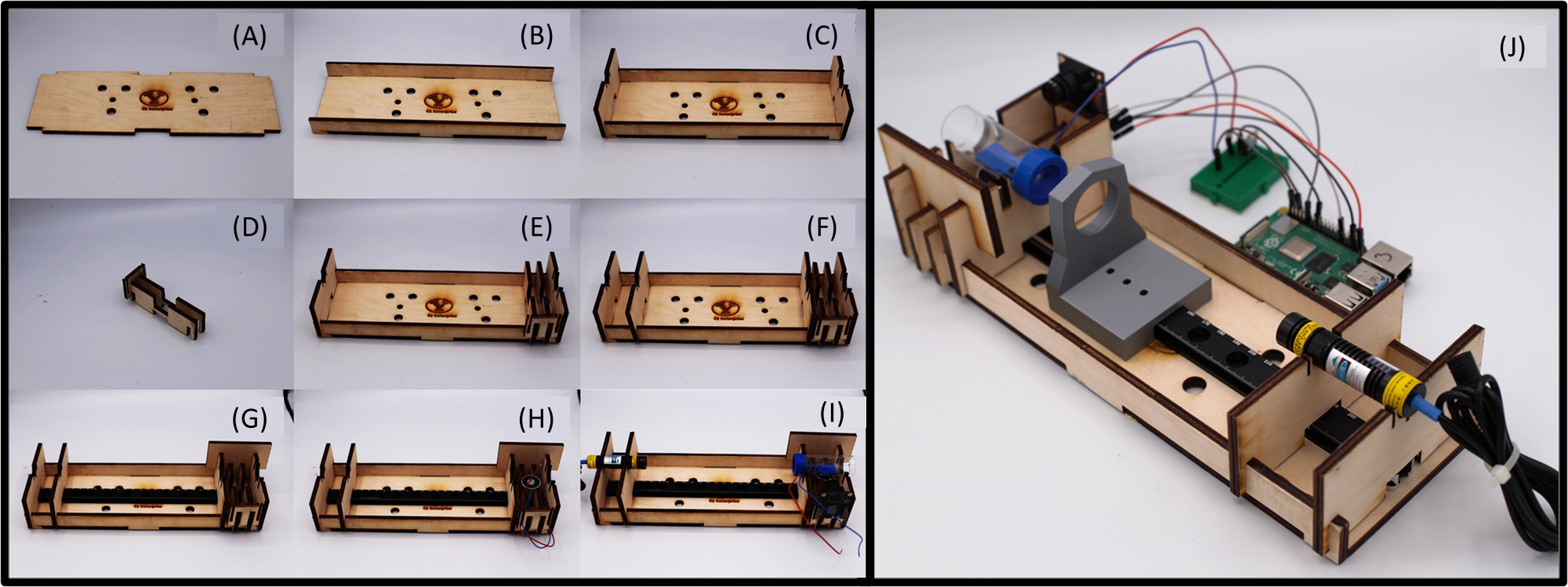
- Coloque la pieza base hacia abajo con el emblema Y hacia arriba (Figura 1A).
- Sostenga las dos piezas laterales largas a cada lado de la base mientras el primer soporte láser se desliza para colocarlo en un extremo y el primer soporte del tubo de ensayo en el otro lado (Figura 1B, C).
- Hacia un lado, deslice ambos soportes de electroimán sobre el soporte de la cámara. Asegúrese de que los soportes de los imanes estén separados por ~ 1 cm en cada lado (Figura 1D).
- Deslice los soportes para imanes y el soporte para cámaras como una unidad junto al primer soporte de tubo de ensayo, espaciado. Por lo tanto, 1 cm entre el soporte del tubo de ensayo y el primer soporte del electroimán (el borde del soporte de la cámara más allá del soporte del electroimán puede servir como referencia para 1 cm) (Figura 1E).
NOTA: Tanto el soporte de la cámara como el escudo de luz no son necesarios para el uso principal del sistema de captura en miniatura, pero ambos se recomiendan para la uniformidad de la configuración de la plataforma.
- Deslice los soportes para imanes y el soporte para cámaras como una unidad junto al primer soporte de tubo de ensayo, espaciado. Por lo tanto, 1 cm entre el soporte del tubo de ensayo y el primer soporte del electroimán (el borde del soporte de la cámara más allá del soporte del electroimán puede servir como referencia para 1 cm) (Figura 1E).
- A continuación, coloque el segundo soporte de tubo de ensayo después de ambos soportes de electroimán para que haya ~ 1 cm de espacio entre el segundo soporte de tubo de ensayo y el segundo soporte de electroimán.
NOTA: En total, entre los dos soportes de tubo de ensayo, hay ~ 4 cm de espacio (la montura de la cámara tiene un ancho de 4 cm, para una referencia de posicionamiento) (Figura 1F).- Si utiliza el protector/bloqueador de luz opcional (Expediente complementario 5), deslice el escudo de luz sobre el extremo opuesto de los soportes de tubos de ensayo y los soportes de electroimanes desde el soporte de la cámara; esto ayudará a centrar y alinear el tubo de ensayo y los soportes de electroimán.
- Deslice el segundo soporte láser en su lugar; no se requiere una distancia exacta. La distancia recomendada es de 3-4 cm, pero esto puede necesitar variar dependiendo de la longitud del láser.
- Si se desea, se puede deslizar un riel óptico (consulte la Tabla de materiales) debajo de todos los soportes para alinear otros elementos del sistema de trampeo. Esto será particularmente útil para alinear la lente con el láser y el tubo de ensayo (Figura 1G).
- Coloque el electroimán (ver Tabla de Materiales) en los soportes del electroimán (Figura 1H).
3. Conexión del circuito con la placa de microcontrolador especificada
- Conecte un monitor de computadora, un teclado y un mouse a la placa del microcontrolador (consulte la Tabla de materiales). Inicie la placa del microcontrolador y asegúrese de que el sistema operativo está funcionando. No se requieren cambios en las configuraciones originales del microcontrolador, aunque se pueden seleccionar tanto VNC (conexión de red virtual) como SSH (shell seguro) si se desea. Esto permitiría el acceso remoto al microcontrolador.
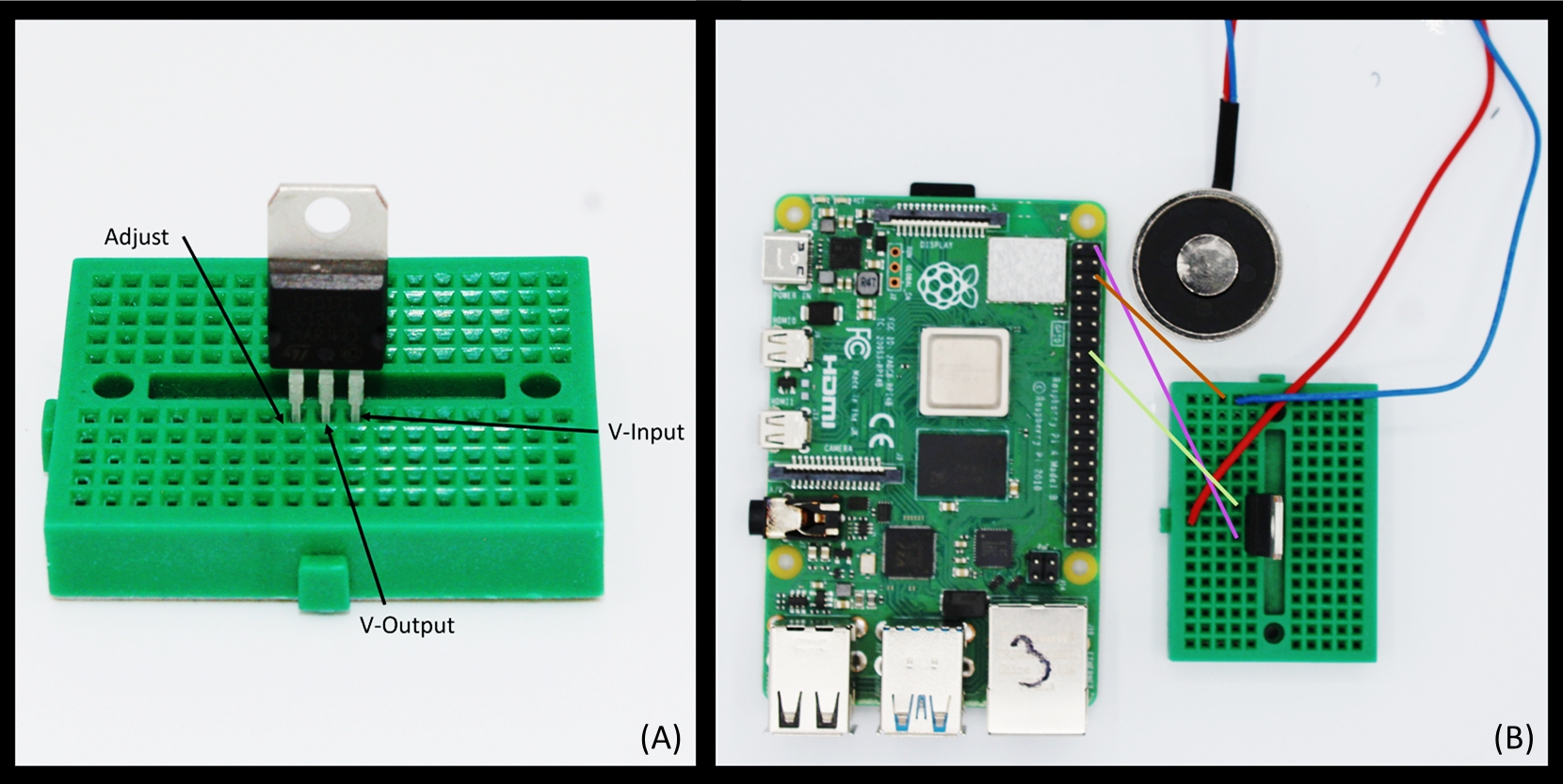
- Construya el circuito de control de electroimán utilizando un regulador de voltaje (consulte la Tabla de materiales), una placa de pruebas y algunos cables (Figura 4A).
NOTA: Todos los números de pin para la placa del microcontrolador son los pines GPIO (entrada y salida de uso general).- Coloque el regulador de voltaje en la placa de pruebas para que cada pin esté en una fila diferente para permitir un uso adecuado.
- Conecte el pin de entrada del regulador de voltaje a uno de los pines de alimentación de 5V en la placa del microcontrolador.
- Conecte el pin de ajuste del regulador de voltaje a GPIO 23 en la placa del microcontrolador.
- Conecte el cable de entrada del electroimán al pin de salida del regulador de voltaje. Luego conecte el cable de salida del electroimán a un pin de tierra en el microcontrolador; esto se logra mejor cuando se usa otra fila en la placa de pruebas para conectar las dos usando un cable adicional.
4. Carga del código para operar el sistema
NOTA: Para cargar el código, se deben seguir los pasos 4.1 o 4.2. El paso 4.1 proporciona instrucciones para la versión simple del código que no utiliza una cámara. El paso 4.2 proporciona instrucciones para la versión que utiliza una cámara.
- Realice los pasos en alineación con las instrucciones proporcionadas en el Archivo Suplementario 6.
- Abra el terminal y navegue hasta la ubicación para almacenar los archivos necesarios. Cree un nuevo directorio en la placa del microcontrolador escribiendo el comando de terminal 'mkdir' seguido del nombre del directorio deseado. Este directorio se utilizará para almacenar los archivos para ejecutar el equipo de captura.
- Inserte el archivo complementario 6 en el nuevo directorio. Consulte la sección Léame en la sección inicial del archivo para obtener más información. Después de cambiar el número de prueba a la cantidad deseada, el programa está listo para ejecutarse.
Nota : este archivo contiene una variable necesaria llamada num_tries que controla cuántas pruebas realizar en una sola ejecución. Este archivo siempre incluye algunas pausas, que se pueden acortar para pruebas más rápidas.
- Ejecute y vea SQLite en la placa del microcontrolador siguiendo los pasos que se indican a continuación. Esto requiere el Archivo Complementario 7-11 y una cámara y la experiencia relevante.
- Instale las bibliotecas de base de datos necesarias en la placa del microcontrolador escribiendo en el terminal 'Sudo apt-get install SQLite browser' y 'Sudo apt-get install sqlite3'. Esto permitirá que la placa del microcontrolador almacene automáticamente todos los datos de las pruebas utilizando el Archivo Suplementario 9.
- Guarde el archivo complementario 11, el script de la cámara como main.py en la cámara. Esto se puede hacer a través de un explorador de archivos o el entorno de desarrollo integrado (IDE) desarrollado para la cámara (consulte la Tabla de materiales).
NOTA: Se recomienda el IDE porque permite a los usuarios ver la salida de la cámara, lo que ayuda a garantizar que la cámara esté enfocando correctamente. - Conecte la cámara a la placa del microcontrolador. Utilice 4 pines, incluido el pin de tierra de la cámara. Conecte el pin de tierra a la toma de tierra de la placa del microcontrolador. Los siguientes pines deben coincidir como se menciona a continuación:
- Conecte el pin de la cámara 8 a GPIO 19: este pin envía los resultados de cada trampa al pi.
- Conecte el pin de la cámara 9 a GPIO 17: este pin le da permiso a la cámara para comenzar a buscar.
- Conecte el pin de la cámara 7 a GPIO 5: este es el pin de estado de la cámara.
- Cree un directorio para almacenar todos los archivos. Después de crear este directorio, guarde los archivos como se proporciona en el archivo complementario 7-10 en el directorio; cámbieles el nombre readme.txt, main.py, electromagnet.py y test_insert.py, respectivamente.
- Lea el Archivo Complementario 7 (Léame.txt).
Nota : el archivo léame proporciona una buena explicación de lo que hace cada archivo y los cambios que podrían ser necesarios en cada archivo, como la ruta de directorio de la base de datos. - Abra el visor de base de datos instalado en el paso 4.2.1. Haga clic en el botón Nueva base de datos y guarde la base de datos en el mismo directorio que los otros archivos. La nueva base de datos debe coincidir con el nombre del archivo de base de datos que se encuentra en test_insert.py.
- Dentro de la base de datos, cree una tabla dentro de la nueva base de datos para guardar los datos. La base de datos tiene 5 campos, parameter_type, trapped, testname, testnum y rigID.
NOTA: Las secciones de la tabla deben ser precisas según lo especificado o se deberán realizar más cambios en Main.py y test_insert.py.
5. Preparación de la prueba
- Prepare la lente colocando la lente dentro del soporte de la lente. Asegúrese de que la lente permanezca dentro del soporte durante las pruebas. Es posible que se necesite un poco de pegamento caliente aquí.
NOTA: La plataforma requiere el uso de un biconvexo esférico para garantizar la formación adecuada de las regiones de captura. - Después de preparar la lente (paso 5.1), coloque el soporte de la lente en el riel óptico y el láser (consulte la Tabla de materiales) en el soporte láser.
NOTA: El láser sugerido en la lista de materiales no requiere calibración antes de su uso. Las gafas de seguridad deben usarse cada vez que el láser esté en uso.- Usando la lente y el láser u otra fuente de luz, busque el punto focal del láser y deslice el soporte de la lente a lo largo del riel óptico hasta que el punto focal esté centrado sobre el electroimán.
NOTA: Este paso es crítico para la captura; si el punto focal no está centrado sobre el electroimán, la plataforma en voladizo no elevará partículas hacia el punto focal. - Marque este punto con un lápiz en la base de madera para futuras referencias.
NOTA: Cada lente ya viene con una medición de distancia focal, pero estas mediciones no siempre son correctas.
- Usando la lente y el láser u otra fuente de luz, busque el punto focal del láser y deslice el soporte de la lente a lo largo del riel óptico hasta que el punto focal esté centrado sobre el electroimán.
- Preparar la cita de captura
- Asegúrese de que el láser esté correctamente apagado de nuevo.
- Usando una pistola de pegamento caliente, pegue un pequeño imán de botón (consulte la Tabla de materiales) de la misma polaridad que el electroimán en la superficie plana de la plataforma para que el electroimán repela la plataforma.
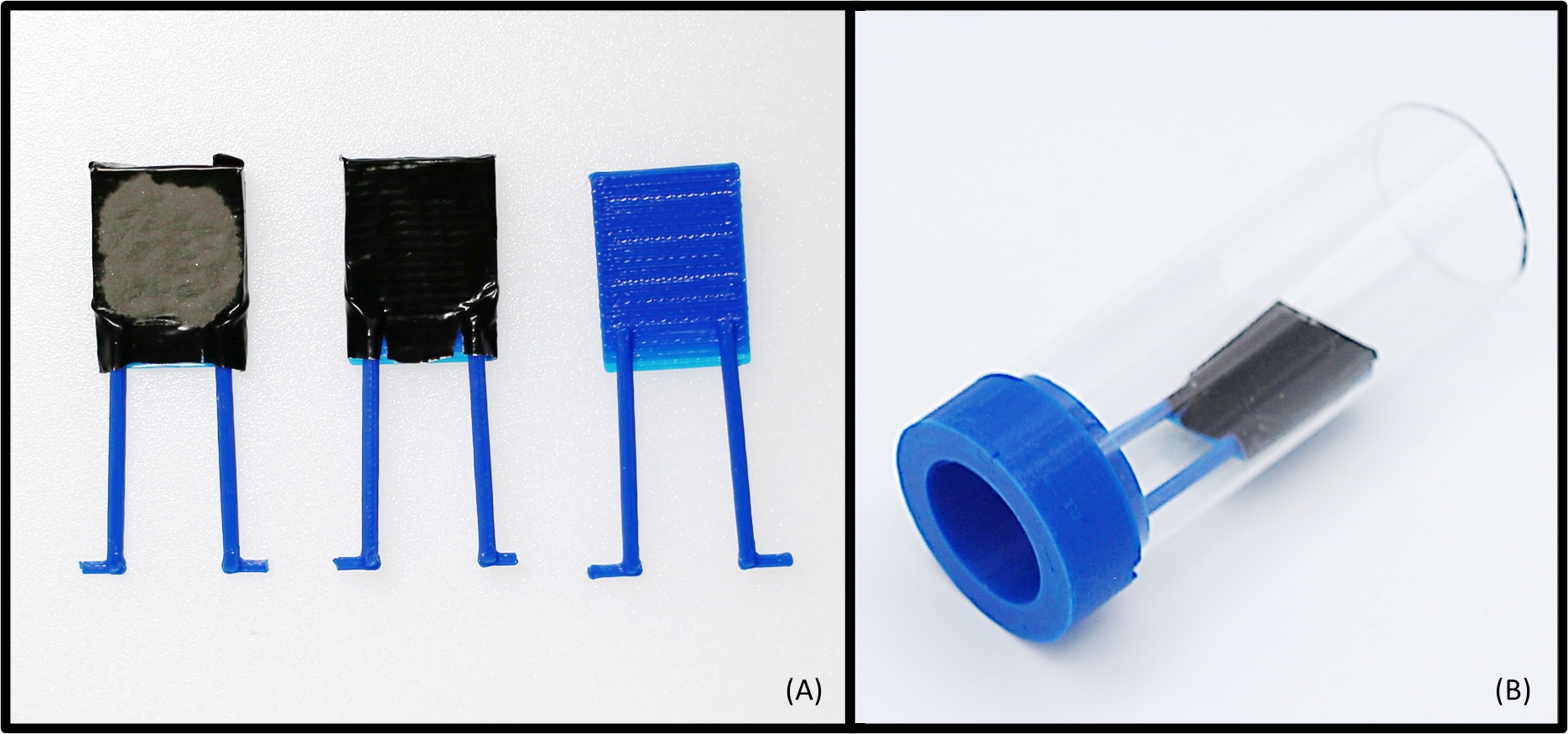
NOTA: La polaridad de los imanes debe coincidir adecuadamente para que la plataforma sea repelida por el electroimán, empujando las partículas hacia el haz del láser para que pueda producirse la captura. - Tome la plataforma en voladizo impresa en 3D y cubra la plataforma con papel de aluminio negro, que protege la plataforma de la fusión.
NOTA: Se puede usar una lámina regular, pero causa demasiado deslumbramiento para que se use el sistema de cámara. Pruebe a usar la cinta de lámina negra (consulte tabla de materiales), que funciona bien con la cámara (Figura 5A). Se recomienda la lámina porque se puede reemplazar fácilmente para probar otras sustancias, pero se pueden usar productos similares si se desea. - Después de cubrir la plataforma con el papel de aluminio, coloque el tipo de partícula seleccionado elegido por el usuario para la prueba en el lado inclinado de la plataforma (consulte la Tabla de materiales para las opciones de tipo de partícula o consulte la Figura 6A).
- Inserte suavemente los brazos en voladizo en el soporte circular para que el lado del imán esté orientado hacia afuera. Luego inserte suavemente el tubo de ensayo en el mismo soporte. Si esto se ha hecho correctamente, el imán casi estará tocando el vidrio (Figura 5B).
- Coloque el tubo de ensayo en los soportes del tubo de ensayo para que la plataforma esté centrada sobre el electroimán. Si el imán se ha unido adecuadamente a la plataforma en voladizo, el voladizo debe parecer estar en una posición ascendente repelida por el electroimán.
- Coloque la cámara en el soporte de la cámara para capturar cualquier trampa que ocurra por encima / alrededor de la plataforma. A continuación, verifique todos los demás posicionamientos (Figura 1I-J).
6. Inicio de la prueba
NOTA: Para las pruebas, se deben seguir los pasos 6.1 o 6.2.
- Si utiliza las instrucciones del paso 4.1, pulse inicio en el archivo o inicie el archivo normalmente desde el terminal.
- Si utiliza las instrucciones del paso 4.2, inicie esta prueba desde el terminal con los parámetros que se mencionan a continuación.
- Usando comandos de terminal, ejecute el sistema de archivos una vez dentro del directorio adecuado con el comando "python3 main.py test_num parameter_type exact_parameter". El archivo main.py se proporciona en el Archivo Complementario 8.
- Reemplace el test_num con el número de pruebas deseadas. Reemplace el Parameter_type por el tipo de parámetro en el que se centra la prueba.
NOTA: Por ejemplo, si se realizaran pruebas para determinar qué láser motorizado es el mejor, Parameter_type sería reemplazado por laser_power, y el exact_parameter sería reemplazado por la potencia de salida óptica del láser actual.
Resultados
El principal resultado logrado al seguir el protocolo anterior es la creación de una plataforma de captura fotoforética en miniatura, que puede probar rápidamente varios parámetros. Hasta ahora, estos equipos se han utilizado para probar dos parámetros críticos, la potencia del láser y el tipo de partícula. El funcionamiento paralelo de múltiples plataformas en miniatura ha permitido a los investigadores recopilar datos con tamaños de muestra mucho más grandes en un período de tiempo mucho más rápido.
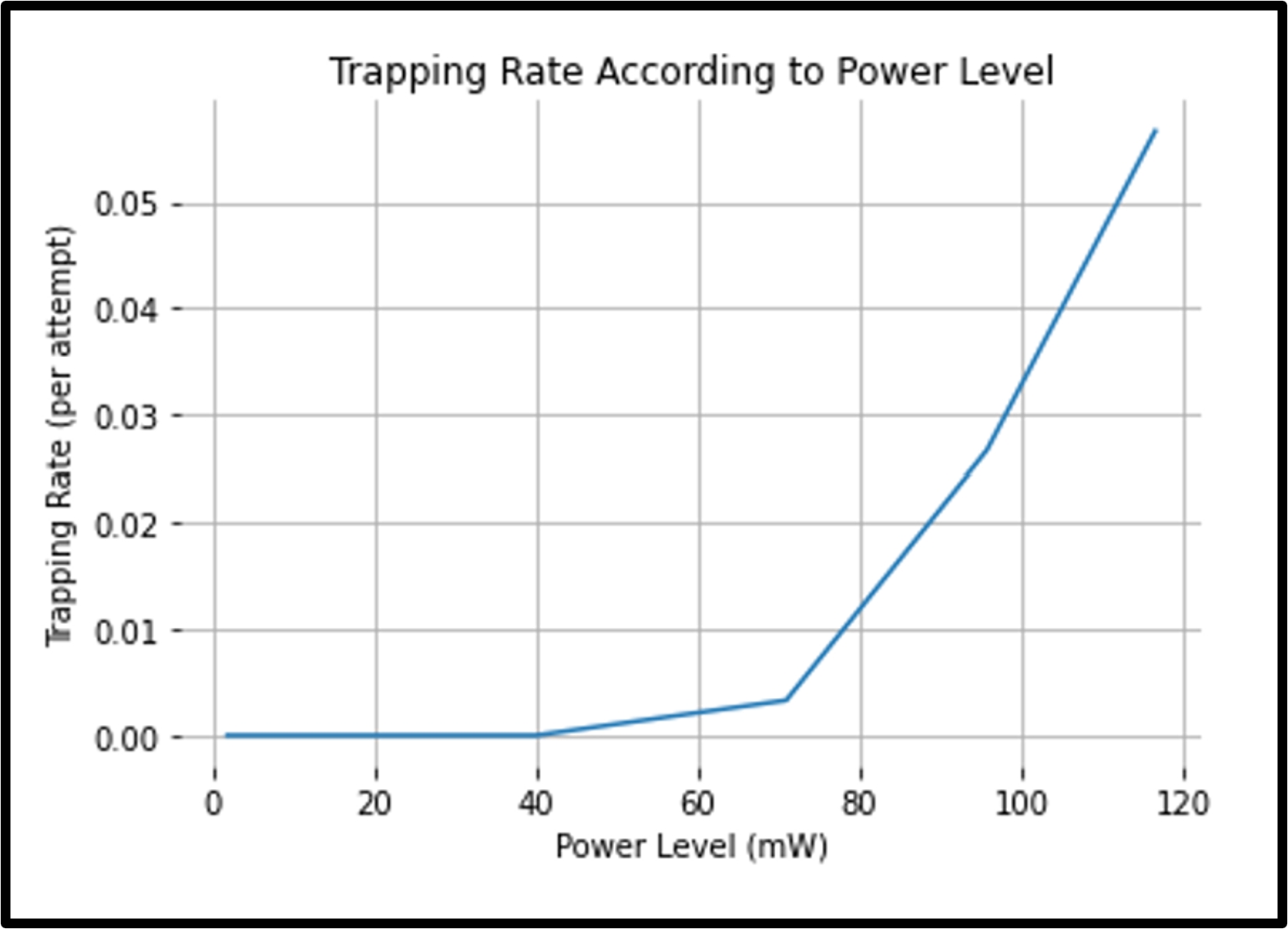
La primera prueba, realizada mientras se desarrollaba el protocolo anterior, fue una prueba de potencia láser. Durante esta prueba se utilizó un solo equipo en miniatura, sin el sistema de detección de cámaras, ya que aún no se había desarrollado; en su lugar, se utilizó el paso 4.1 del protocolo. Esto requirió que un investigador estuviera presente para la recopilación de datos de todas las detecciones de trampas. El objetivo de esta prueba fue determinar la potencia de salida láser ideal para que se produjera el atrapamiento. Al colocar un atenuador óptico (filtro de densidad neutra variable) entre el láser y la lente en la plataforma, se varried la potencia óptica del láser. La Figura 7 muestra los resultados de este experimento. Una alta potencia óptica de salida se correspondía con una mayor tasa de captura. El láser a plena potencia tuvo la tasa de captura más alta registrada para esta prueba. Sin embargo, esta prueba se limitó a un láser con una potencia óptica máxima de ~ 120 mW.
La segunda prueba consistió en determinar qué material o sustancia tendría la mayor tasa de captura. Esta prueba se realizó utilizando un singular banco de pruebas en miniatura sin el sistema de detección de cámara. Se probaron diez partículas diferentes con un tamaño de muestra de 100 intentos para cada partícula (todas las sustancias probadas se pueden encontrar en la Tabla de Materiales con sus descripciones). El tamaño de la muestra se limitó a 100 debido a la necesidad de que un investigador vigilara cada intento de recopilación de datos. Todos los datos necesarios se recopilaron en dos días hábiles. La Figura 6A muestra los resultados de la prueba de tipo de partícula. De los 10 tipos de materiales/partículas probados, se encontró que las nanopartículas de diamante (55-75%) y el tóner de impresora fueron los dos mejores tipos de partículas con tasas de 14% y 10%, respectivamente (Tabla 1).
Después de las dos primeras pruebas, los investigadores se sintieron limitados a una plataforma singular que requería una observación activa durante las pruebas; esto condujo al paso 4.2 descrito en el protocolo. Esta opción incluye un sistema de detección de cámara, que permite a los usuarios ejecutar varios bancos de pruebas en miniatura a la vez y no requiere la presencia de un usuario para las pruebas.
Para probar este nuevo sistema de cámara, se realizó una nueva prueba modificada de la prueba de tipo de partícula. Solo se seleccionaron unos pocos tipos de partículas diferentes de las 10 utilizadas inicialmente para volver a probarse para esta nueva prueba de tipo de partícula. Las partículas seleccionadas se sometieron a una nueva ronda de pruebas. Utilizando una "granja" de plataforma de prueba de cuatro plataformas de prueba en miniatura, cada una de las partículas seleccionadas tenía un tamaño total de muestra de prueba de 4.000 intentos. Una vez más, se recogieron todos los datos necesarios en dos jornadas laborales completas (Tabla 2). El propósito principal de esta nueva prueba de tipo de partícula era probar el nuevo sistema de cámaras. Esta prueba permitió comparar los resultados de la prueba inicial de tipo de partícula, con un investigador que informa de las trampas, con los resultados del sistema de detección de cámaras. Los resultados de las pruebas fueron ligeramente diferentes a las pruebas originales, pero aún comparables (Figura 6B). El mejor tipo de partícula de la prueba inicial, las nanopartículas de diamante 55-75%, seguía siendo el mejor en la nueva prueba, pero tenía una tasa de captura ligeramente más baja que antes. La diferencia en los resultados se debe probablemente a un tamaño de muestra más grande y un sistema de detección de cámara imperfecto. Aunque los resultados de esta prueba de partículas fueron ligeramente diferentes de lo esperado, al probar otros parámetros donde el material se mantiene constante, como la potencia del láser o la distancia focal de la lente, los resultados recopilados por el guión de la cámara serán confiables.
Los resultados de las tres pruebas realizadas son relativos a las plataformas en las que se realizaron, pero las tendencias encontradas en los datos demostrarán ser ciertas cuando se prueben en otras plataformas de pruebas fotoforéticas más precisas. Los bancos de pruebas en miniatura no están destinados a reemplazar por completo a otros bancos de pruebas. Aún así, están destinados a permitir a los investigadores explorar todos los parámetros y posibilidades de manera rápida y eficiente en pruebas edisonianas (prueba y error) para encontrar tendencias y descubrimientos para futuras investigaciones en plataformas más precisas.

Figura 1: Progresión de la plataforma con la plataforma de pruebas fotoforéticas en miniatura completada. La figura se corresponde con el paso 2 y sus subpasos. (A) Muestra el paso 2.1. (B) Demuestra el paso 2.2, la base con los dos lados largos. (C) Muestra el paso 2.2, el marco de la plataforma, una base con ambos lados y el primer soporte láser y el soporte del tubo de ensayo. (D) El paso 2.3 muestra el soporte de la cámara combinado con ambos soportes de electroimán. (E) El paso 2.3.1 ofrece la combinación de las figuras 1C, D. (F) El paso 2.4, el segundo soporte del tubo de ensayo y el segundo soporte láser se han agregado. (G) Se han añadido el escudo luminoso opcional y el riel óptico. (H) El electroimán se coloca en su soporte. (I) El láser y el tubo de ensayo se han colocado en sus soportes. (J) Esto muestra todo el tig de prueba completado sin la fuente de alimentación para la placa del microcontrolador. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 2: Piezas impresas en 3D. En esta figura se incluyen el soporte de la lente, el soporte de la plataforma circular y la plataforma en voladizo. El diseño del soporte de lente impreso en 3D se puede encontrar en el Archivo Suplementario 1. Este soporte de lente, cuando se imprime, es para una lente de 30 mm de diámetro. El archivo complementario 2-3 contiene los diseños para el soporte de la plataforma y la plataforma. El soporte de la plataforma tiene cuatro juegos que la plataforma puede usar, pero para que la plataforma funcione según lo diseñado, la plataforma debe usar los orificios indicados en la figura. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 3: Piezas cortadas con láser etiquetadas. Esta figura etiqueta las piezas del Archivo Suplementario 4, que contiene el archivo para todas las piezas cortadas con láser, excepto el escudo de luz opcional. Después de la impresión, debe haber 1 base, 2 lados, 2 soportes láser, 2 soportes de tubo de ensayo, 2 soportes de electroimán y 2 soportes para cámaras (solo se necesita uno). El escudo de luz opcional se puede encontrar en el Archivo Complementario 5. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 4: Regulador de voltaje y circuito de electroimán. (A) Como referencia, al construir el circuito. El regulador de voltaje tiene 3 pines, un ajuste, entrada y salida. (B) Esta figura muestra el circuito completado descrito en el paso 3. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 5: Preparación de la plataforma y cita de trampa de probeta. (A) Antes de que se puedan realizar las pruebas, la plataforma debe estar preparada. El depósito de partículas donde el láser brillará para recoger partículas se colocará en la plataforma inmediatamente antes de la prueba. El papel de aluminio negro debe colocarse en la plataforma antes de las partículas. Esto evita que el láser se derrita a través de la plataforma. (B) Durante la prueba, la captura real de partículas ocurre dentro del tubo de ensayo, asegurando un movimiento automático consistente de la plataforma para cada intento de trampa. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 6: Prueba de tipo de partícula (manual) y (cámara). (A) Se realizó una prueba de 10 partículas diferentes para encontrar la partícula con la mejor tasa de captura. B) Se realizó un segundo ensayo de tipo de partícula con un sistema de detección por cámara. Solo se probaron 4 de las 10 partículas originales. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 7: Resultados de la prueba de potencia láser. La velocidad de captura para diferentes niveles de potencia del láser se midió durante la prueba de potencia del láser. Las potencias más altas produjeron mayores tasas de captura. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
| Licor Negro (polvo) | Licor negro (pasta) | Tungsteno (12 micras) | Tungsteno (1-5 micras) | Polvo de aluminio | Tóner de impresora | Grafito | Nanopartículas de diamante (95%) | Nanopartículas de diamante (55-75%) | Nigrosina | ||
| 1 | 2 | 2 | 1 | 0 | 3 | 2 | 1 | 5 | 2 | ||
| 1 | 3 | 2 | 0 | 1 | 2 | 1 | 2 | 3 | 1 | ||
| 2 | 1 | 1 | 1 | 0 | 3 | 1 | 1 | 3 | 1 | ||
| 2 | 1 | 0 | 2 | 0 | 2 | 0 | 1 | 3 | 0 | ||
| 6 | 7 | 5 | 4 | 1 | 10 | 4 | 5 | 14 | 4 | ||
| 6.00% | 7.00% | 5.00% | 4.00% | 1.00% | 10.00% | 4.00% | 5.00% | 14.00% | 4.00% | ||
Tabla 1: Resultados de la prueba de tipo de partícula que tendría la mejor tasa de atrapamiento. El tamaño total de la muestra de 100 intentos se realizó en 4 series de 25 para cada material.
| Pasta de licor negro | Nanopartículas de diamante 55-75% | Grafito | Tungsteno (12 micras) |
| 2.10% | 11.70% | 10.60% | 6.40% |
Tabla 2: Resultados de la prueba de tipo de partícula realizada con un sistema de detección de cámara. Datos recopilados de la base de datos SQLite. Los datos se compilaron inicialmente en 4 series de 1000 para un tamaño de muestra de 4000 por material. Los registros individuales para cada conjunto no se compilaron a partir de SQLite; sólo se compilaron los porcentajes totales.
Expediente complementario 1: File_1-Lens Holder.stl. Contiene el archivo de impresión 3D para el soporte de la lente (consulte la Figura 2). Haga clic aquí para descargar este archivo.
Expediente complementario 2: File_2-Platform.stl. Contiene el archivo de impresión 3D para la plataforma en voladizo (consulte la Figura 2). Haga clic aquí para descargar este archivo.
Expediente complementario 3: File_3-Platform Holder.stl. Contiene el archivo de impresión 3D para el soporte de la plataforma (consulte la Figura 2). Haga clic aquí para descargar este archivo.
Expediente complementario 4: File_4-Rig Pieces.odg. Contiene el archivo de corte por láser para las piezas de la plataforma (consulte la Figura 1 y la Figura 3). Haga clic aquí para descargar este archivo.
Archivo complementario 5: File_5-Light Shield.odg. Contiene el archivo de corte por láser para el protector/bloqueador de luz opcional. Haga clic aquí para descargar este archivo.
Expediente complementario 6: File_6-Opt1.system.py. Contiene el código completo para el uso de la instrucción del paso 4.1. Haga clic aquí para descargar este archivo.
Expediente complementario 7: File_7-Opt2.Léame.txt. Contiene el archivo Léame con algunos detalles para los archivos complementarios 8-11. Haga clic aquí para descargar este archivo.
Expediente Complementario 8: File_8-Opt2.main.py. Contiene el script principal para las instrucciones que se encuentran en el paso 4.2. Haga clic aquí para descargar este archivo.
Expediente complementario 9: File_9-Opt2.electromagnet.py. Contiene el script para el paso 4.2 que controla el electroimán. Haga clic aquí para descargar este archivo.
Expediente Complementario 10: File_10-Opt2.test_insert.py. Contiene el script para el paso 4.2 que carga automáticamente los datos en la base de datos. Haga clic aquí para descargar este archivo.
Expediente Complementario 11: File_11-Opt2.camera_controller.py. Contiene el script que debe cargarse en la cámara durante el paso 4.2.2. Haga clic aquí para descargar este archivo.
Discusión
El presente protocolo contiene varios pasos esenciales que son críticos para el funcionamiento automático de la plataforma de trampeo. Primero, el electroimán debe estar conectado adecuadamente a la placa del microcontrolador a través del circuito especificado. Sin el electroimán, se pierde la utilidad total del banco de pruebas en miniatura. El electroimán controla cada intento de captura elevando el depósito de partículas en la plataforma en voladizo hacia la trayectoria del láser. Cada intento de trampa es otro ciclo de subir y bajar la plataforma.
La cámara solo se utiliza en el paso 4.2 como se describe en el protocolo, pero es fundamental para esa opción. El paso 4.2 requiere una cámara para detectar si una partícula ha sido atrapada, lo que permite la recopilación de datos de múltiples plataformas. Si la cámara no está conectada correctamente, el equipo no podrá intentar ningún trampeo.
El tercer y más crítico paso, el paso 5.2.1, es alinear y enfocar el láser. La lente debe colocarse de manera que el punto focal se produzca sobre el electroimán. La plataforma en voladizo pasará a través del punto focal sobre el electroimán, permitiendo que las partículas se atrapen. Supongamos que el punto focal no está centrado por encima de la mitad del electroimán. En ese caso, se vuelve difícil asegurarse de que la plataforma en voladizo que transporta partículas pase a través del punto focal para crear trampas. Esto puede conducir a la falta de trampas. También es esencial que la plataforma se eleve sobre el electroimán para que la trayectoria del láser no entre en contacto constante con la plataforma. Esto puede hacer que la cámara informe de falsos positivos. Para ajustar más fácilmente la ubicación del punto focal, se sugiere utilizar un riel óptico en la configuración de la plataforma; esto permitirá a los usuarios deslizar fácilmente el soporte de la lente hacia atrás o hacia adelante para colocar el punto focal correctamente. El láser y la parte del tubo de ensayo / voladizo ya están alineados si la plataforma se ha construido adecuadamente; el uso del riel óptico mantendrá la lente alineada con las otras partes.
En el Protocolo se detallan dos opciones separadas, el paso 4.1 y el paso 4.2. La primera opción, el paso 4.1, es la forma sencilla original de ejecutar el equipo de tapping en miniatura. Esta opción se basa en el ojo humano para detectar partículas en lugar de un sistema de cámara. Esta opción es la mejor para recopilar conjuntos más pequeños de datos rápidamente o en situaciones en las que se desea una demostración en vivo. La primera opción se utilizó durante los dos primeros experimentos antes de que se creara la segunda opción. La segunda opción, el paso 4.2, utiliza una cámara para la detección automática y el reventado, lo que permite ejecutar miles de pruebas e ingresarlas en una base de datos sin ninguna supervisión humana. La precisión de la cámara depende de la condición exacta de la prueba; ciertos materiales más reflectantes, cuando se probaron, parecieron tener una tasa de captura menos precisa en comparación con pruebas similares realizadas con detección humana. Sin embargo, se pueden cambiar varios parámetros en el guión de la cámara para aumentar la precisión de la cámara. La precisión exacta de la cámara es algo que se puede mejorar, pero tampoco es una preocupación importante porque los equipos en miniatura están destinados a las pruebas iniciales. La segunda opción también se puede modificar fácilmente para ejecutar dos bancos de pruebas desde una sola placa de microcontrolador; los detalles de esa modificación se incluyen en el Expediente Complementario 7.
El trabajo actual está desarrollando una forma más exacta y consistente de detección automática de trampas a través del aprendizaje automático. Este nuevo sistema de detección de aprendizaje automático, cuando esté terminado, utilizará redes neuronales convolucionales para detectar mejor las partículas atrapadas con una tasa de precisión mucho mayor (por encima del 95%), reforzando aún más el uso y el efecto que tales plataformas de prueba en miniatura pueden tener en el futuro de la investigación de pantallas de trampas fotoforéticas.
En su forma base actual, la plataforma de captura en miniatura está limitada de varias maneras. Estos equipos en miniatura no pueden crear OTD reales escaneando la partícula después de que se haya producido una trampa. El diseño también limita la posibilidad de que se agreguen escáneres para su uso futuro en la creación de OTD. Otra limitación del diseño es la necesidad de componentes adicionales para que se realice una prueba específica. Por ejemplo, se utilizó un atenuador óptico variable para recopilar los conjuntos de datos a diferentes niveles de potencia de salida óptica durante la prueba de potencia láser. Del mismo modo, si un investigador deseara probar la longitud de onda del láser en una prueba futura, requeriría varios otros láseres de potencia óptica comparable con diferentes longitudes de onda además del láser utilizado en este trabajo. Lo más probable es que la plataforma requiera modificaciones adicionales para sostener cada láser, este proceso limitaría la velocidad a la que se podría realizar dicha prueba, pero aún sería posible. Este diseño también está determinado por la necesidad de imprimir en 3D un nuevo soporte de lente para cada lente. El diseño y la aplicación también se limitan a las lentes biconvexas esféricas, que producen aberración esférica para formar regiones donde puede ocurrir la captura.
En el futuro, las aplicaciones futuras incluyen pruebas continuas y optimización de los parámetros de captura fotoforética. Como se mencionó brevemente anteriormente, la plataforma de captura en miniatura podría modificarse fácilmente en un sistema OTD básico de bajo costo agregando escáneres para el control del eje y el eje x. La entrega de partículas controladas por electroimán utilizada en la plataforma de captura en miniatura también podría implementarse en futuros sistemas OTD avanzados.
La plataforma de captura en miniatura es, en última instancia, única y distinta en este campo de investigación porque se puede fabricar de manera económica y rápida, lo que permite realizar pruebas masivas rápidas. Estos equipos están destinados a ser sistemas lean diseñados para la prueba inicial y la optimización de los parámetros de captura fotoforética. Una plataforma individual puede probar a una velocidad de ~ 250 intentos por hora. Se han desarrollado muchos otros tipos de sistemas o plataformas de captura fotoforética para tener mejores sistemas automáticos o lograr más escaneando la partícula para crear una imagen después de una trampa exitosa1,8. Estos sistemas de captura en miniatura no están destinados a reemplazar el uso de dichos sistemas. Están destinados a probar rápidamente los parámetros y las condiciones de la captura fotoforética para dar a los investigadores una mejor comprensión de lo que hace que la captura fotoforética sea buena. La plataforma de captura en miniatura democratizará la investigación de trampas fotoforéticas y permitirá una nueva ola de experimentación y progresión edisoniana en este campo de investigación.
Divulgaciones
Los autores no tienen nada que revelar.
Agradecimientos
Los autores agradecen el apoyo financiero de la National Science Foundation. Premio NSF ID-1846477.
Materiales
| Name | Company | Catalog Number | Comments |
| 1/4In Plywood | NA | Sized to fit in Laser-cutter (normally 1 x 1 ft) | |
| 3D FDM Printer | Raise 3D | Pro 2 | Any equivalent equipment would suffice |
| 3D Laser-cutter Printer | Glow Forge | Basic | Any equivalent equipment would suffice |
| 5V Power Supply | AC/DC Adaptor | ||
| Alumiunum Powder | bioWORLD | 10576 | APS 17-30 micron |
| Black Aluminum Foil Tape | LLTP BF255 (on Amazon) | other types of foil (black foil) can be used instead if desired | |
| Black Liquor | a recycled byproduct formed during the pulping of wood | ||
| Button Magnet | Mealos | 8 x 2 mm | |
| Class 3B Laser 405 nm (Tube Laser) | M-16A405-300-G | Any Optical Output Power and wavelength could be used for testing. For reproducing this work 405 nm and ~120 mW should be used | |
| Diamond Nanoparticles 55-75% | SkySpring Nanomaterials | 0512HZ | 55-75% purity, APS 4-15 nm |
| Diamond Nanoparticles 95% | SkySpring Nanomaterials | 0510HZ | 95% purity, APS 3-4 nm |
| Electromagnet | Wuxue Wn Fang Electric | WP-P25/20 | |
| Glass cutter | Dyna-cut | model 500-1 | any standard glass cutter or wet-cutter could be used |
| Graphite powder | AeroMarine Products | 325 Mesh, APS 44 microns | |
| Jumper Wires | Elegoo | Male to Female wires and Male to Male wires are needed | |
| Lens | Surplus Shed | L8435 | 32 mm Daimeter, 80 mm Focal Length. Any 32 mm lens will fit into current lens holder design |
| Nigrosin (Formalin-Nigrosin) | Innovating Science | IS5818 | 30 mL , actually found on Amazon |
| Open MV Camera | Open MV | M7 | Any equivalent Open MV camera should work |
| Open MV IDE | Open MV | optional free to download integrated development enviroment from OpenMV | |
| Optical Attenuator (Variable Neutral Density Filters) | THORLABS | NDC-100C-2 | |
| Optical Rail | THORLABS | RLA1200 | 12'' optical rail |
| Printer Toner (CISinks Universal Toner) | CISinks | TN420,TN450, TN540, TN660, TN720 Toner powder. Found on Amazon | |
| Raspberry Pi | Raspberry PI | Pi-4 Model B | Any Pi 3 or 4, model B or B+ should suffice (referenced in text as a microcontroller board) |
| Tungsten Powder 12 Micron | Alfa Aesar | 10401-22 | APS 12 micron |
| Tungsten Powder 1-5 Micron | Alfa Aesar | 10400-22 | APS 1-5 micron |
| USB to Micro USB cord | Any company/ model will suffice | ||
| Voltage Regulator | STMicroelectronics | LM317t |
Referencias
- Smalley, D., et al. A photophoretic-trap volumetric display. Nature. 553 (7689), 486-490 (2018).
- Rohatschek, H. Direction, magnitude and causes of photophoretic forces. Journal of Aerosol Science. 16 (1), 29-42 (1985).
- Desyatnikov, A. S., Shvedov, V. G., Rode, A. V., Krolikowski, W., Kivshar, Y. S. Photophoretic manipulation of absorbing aerosol particles with vortex beams: theory versus experiment. Optics Express. 17 (10), 8201-8211 (2009).
- Ke, P. C., Gu, M. Characterization of trapping force in the presence of spherical aberration. Journal of Modern Optics. 45 (10), 2159-2168 (1998).
- Blundell, B. G. On the uncertain future of the volumetric 3D display paradigm. 3D Research. 8, 11 (2017).
- Smalley, D., Nygaard, E., Rogers, W., Gneiting, S. A., Qaderi, K. Progress on photophoretic trap displays. Frontiers in Optics / Laser Science. , (2018).
- Rogers, W., Laney, J., Peatross, J., Smalley, D. Improving photophoretic trap volumetric displays. Applied Optics. 58 (34), 363-369 (2019).
- Peatross, J., Smalley, D., Rogers, W., Nygaard, E., Laughlin, E., Qaderi, K., Howe, L. Volumetric display by movement of particles trapped in a laser via photophoresis. SPIE Proceedings. 10723, 02 (2018).
- Smalley, D., Poon, T., Gao, H., Kvavle, J., Qaderi, K. Volumetric Displays: Turning 3-D inside-out. Optics and Photonics News. 29 (6), 26-33 (2018).
- Shvedov, V. G., Hnatovsky, C., Rode, A. V., Krolikowski, W. Robust trapping and manipulation of airborne particles with a bottle beam. Optics Express. 19 (18), 17350-17356 (2011).
Reimpresiones y Permisos
Solicitar permiso para reutilizar el texto o las figuras de este JoVE artículos
Solicitar permisoExplorar más artículos
This article has been published
Video Coming Soon
ACERCA DE JoVE
Copyright © 2025 MyJoVE Corporation. Todos los derechos reservados