
Method Article
미니어처 자동 광영동 트래핑 리그의 제조 및 테스트
요약
이 작품은 소형 자동 광영동 트랩핑 장비의 제작을 설명하고 특성화합니다.
초록
이 논문은 체적 디스플레이 연구의 민주화 및 크라우드 소싱을 가능하게하는 자동화되고 신속한 팹 호환, 광영동 트랩 테스트 장비를 제시합니다. 이 장비는 레이저 커터, 3차원(3D) 프린터 및 일반적인 수공구를 사용하여 2시간 이내에 구성할 수 있습니다. 현재 형태의 이 장비는 입자 유형, 트랩 유형, 수치 조리개 및 공기 흐름과 같은 중요한 파라미터를 시간당 약 250개 샘플의 속도로 테스트하는 데 사용할 수 있습니다. 약간의 수정으로 사용자의 필요에 따라 레이저 전력 및 레이저 파장과 같은 더 큰 매개 변수 세트를 테스트하기 위해 리그를 만들 수 있습니다. 이 장비는 자동화된 데이터 캡처 및 분석을 위해 머신 비전을 사용할 수 있습니다. 테스트 장비의 작동 및 구성은 간결하고 따라하기 쉬운 단계로 설명됩니다. 전력 및 입자 유형 파라미터를 다루는 네 개의 유닛 테스트 리그 '팜'의 결과가 보고된다. 이 플랫폼은 접근성과 민주화를 통해 광학 트랩 디스플레이 매개 변수 및 연구원의 범위와 구성을 확대 할 것입니다.
서문
광학 트랩 디스플레이(OTD)는 공상 과학 소설에서 볼 수 있는 디스플레이 형상을 가능하게 합니다. 그것은 광페레시스를 통해 입자를 포획하고 입자를 비추는 것으로 작동합니다 1,2,3,4. 그런 다음 그 입자를 공간을 통해 드래그하면 시청자가 비전의 지속성에 따라 연속으로 인식하는 공기 중의 이미지가 형성됩니다5. 이 스크린리스 3D 기술을 통해 긴 투사 프로젝션, 높은 모래 테이블, 랩어라운드 디스플레이1와 같은 형상을 표시할 수 있습니다. 이러한 지오메트리는 화면이 필요 없고 거의 모든 각도에서 볼 수 있는 콘텐츠를 만들기 때문에 독특하게 매력적입니다.
브리검 영 대학교의 연구원들은 빔 확장기 및 갈바노미터 스캐너와 여러 개의 거울 및 하나 이상의 구형 렌즈를 사용하여 구형 수차를 통해 광영동 트랩을 생성함으로써 1세대 광영동 트랩핑 시스템에서 초기 성공을 거두었습니다1,4. 이 1세대 트래핑 장비에는 RGB(적색-녹색-파랑) 레이저도 포함되어 있어 정밀한 컬러 디스플레이 조명이 가능합니다. 이 트래핑 시스템을 사용하면 OTD는 복잡한 경로를 통해 단일 파티클을 이동하여 생성됩니다. 이 접근법은 이미지의 크기를 입방 센티미터 미만으로 제한하고 실시간 이미지의 복잡성을 와이어프레임 및 기타 희소 컨텐츠6,7로 제한한다. 또한,이 기술의 스케일링은 광영동 트랩핑의 불일치에 의해 제한됩니다8. 단일 트랩/파티클 시스템을 최적화할 수 있는 경우, 최적화된 트랩을 복제하고 여러 파티클을 동기적으로 트랩 및 스캔하여 디스플레이를 확장할 수 있습니다9. 단일 트랩의 모든 문제는 다중 트랩 시스템에서 복합화되므로 트랩 및 파티클 파라미터의 신중한 최적화가 중요합니다.
개별 트랩/트랩핑 시스템을 최적화하려면 광영동 트랩핑 시스템의 모든 파라미터에 대해 광범위한 테스트를 수행해야 합니다7. 이러한 파라미터는 입자 유형(물질, 형상, 크기), 레이저 파워, 레이저 파장 및 수치 조리개(초점 거리, 직경, 기울기)를 포함한다. 각 매개 변수에 대한 시행 착오를 통한 테스트 및 실험은 개별 트랩과 여러 동기식 트랩을 최적화합니다. 그래도 많은 양의 데이터를 수집해야합니다.
과거에는 구형 수차를 통한 광영동 포획을 최적화하기위한 연구 및 테스트 프로세스는 전 세계 소수의 연구자에 의해서만 수행되었습니다.1,2,3,4,5,6,7,8,9,10 . 최근까지 브리검 영 대학교의 연구원들은 필요한 데이터를 수집하기 위해 하나의 크고 값 비싼 트래핑 시스템에 의존해 왔으며, 이로 인해 테스트 및 데이터 수집 프로세스가 느려졌습니다1,7. 그러나 20181 년에 광학 트랩 디스플레이를 3D 시각화를위한 솔루션으로 도입 한 이래로 모든 연령대와 여러 대륙의 개인이이 연구에 참여하고자하는 열망을 표명했습니다. OTD에 대한 관심이 높아짐에 따라 연구자들은 모든 이해 관계자가 연구 과정에 참여할 수있는 방법을 찾고 싶어했습니다. 빔 스플리터와 갈바노미터가 포함된 이전 세대의 광영동 트래핑 장비는 대량 생산 및 크라우드소스1,6에 비해 너무 비싸고 시간이 많이 소요되었기 때문에 다른 솔루션이 필요했습니다.
새로운 소형 광영동 트래핑 장비가 개발되어 모든 이해 관계자가 연구에 참여하고 위에서 언급 한 모든 중요한 매개 변수에 대한 데이터를 신속하게 테스트하고 수집 할 수 있습니다. 3D 프린터와 레이저 커터에 액세스 할 수있는 사람이 신속하게 제조 할 수 있습니다. 이 설계는 비용과 복잡성을 최소화하고 위험을 완화하며 자동화, 상호 연결 및 유연성을 극대화하려고 시도합니다(그림 1). 새로운 장비는 가능한 광영동 트랩핑을 위해 가장 간단한 광학 설정, 즉 단일 레이저 및 렌즈10을 사용합니다. 소형 리그는 일단 설정되면 사용이 간편하며 시간당 약 250회 시도의 속도로 테스트할 수 있습니다.
미래의 시민 과학자 및 연구원의 테스트에서 이러한 리그에서 수집 된 데이터는 트랩핑 매개 변수 및 개별 트랩의 최적화를 허용함으로써 3D 시각화에 사용되는 광영동 트랩핑을 개발하는 데 크게 도움이 될 것입니다.
프로토콜
1.3D 필요한 재료의 인쇄 및 레이저 절단
- 아래 나열된 자료를 3D 프린팅
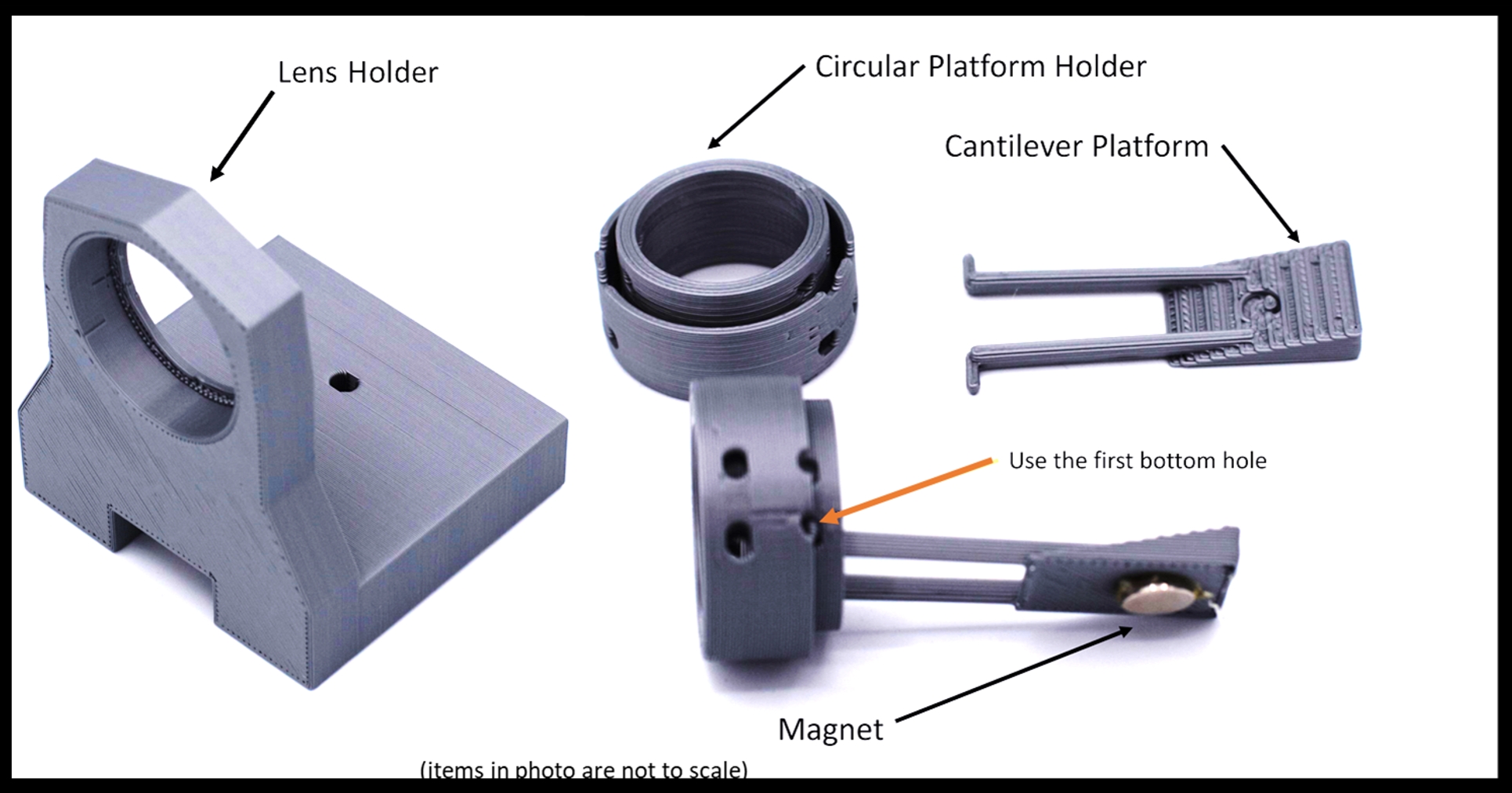
- 보충 파일 1에 제공된 정보에 따라 필라멘트 FDM(융합 증착 모델링) 3D 프린터(재료 표 참조)를 사용하여 렌즈 홀더를 인쇄합니다. 이 렌즈 홀더는 30mm(직경) 렌즈용입니다(그림 2).
참고: 이 파일은 다른 렌즈에 맞게 쉽게 사용자 정의 할 수 있습니다. - 그런 다음 캔틸레버 플랫폼과 홀더(그림 2)를 인쇄합니다(보충 파일 2 및 보충 파일 3).
참고 : 인쇄물의 세부 사항에 따라 ~ 2-14 시간이 걸릴 수 있습니다. 인쇄물의 세부 사항은 트랩핑 물질이 충분히 배치 된 경우 트랩 속도에 영향을 미치지 않아야합니다 (5.3.4 단계).
- 보충 파일 1에 제공된 정보에 따라 필라멘트 FDM(융합 증착 모델링) 3D 프린터(재료 표 참조)를 사용하여 렌즈 홀더를 인쇄합니다. 이 렌즈 홀더는 30mm(직경) 렌즈용입니다(그림 2).
- 3D 레이저 커터(재료 표 참조)를 사용하여 리그 조각을 잘라냅니다(그림 3).
참고 :이 절단은 쿼터 인치 두께의 모든 재료에서 수행 할 수 있지만 목재가 권장되는 재료입니다. 보충 파일 4 에는 목재 조각으로 12 x 12에 맞는 필요한 리그 조각이 포함되어 있습니다. 보충 파일 5 에는 옵션 라이트 실드/블로커가 포함되어 있습니다. - 유리 커터 ( 재료 표 참조)를 사용하여 표준 시험관 (직경 ~ 2.5cm)을 대략 반으로 잘라 두 개의 열린 끝이있는 절반이 ~ 6.5cm 길이가되도록합니다.
2. 나무 굴착기 조립
참고: 목재 장비를 조립하는 동안 2.1 -2.5단계의 지침에서 "슬라이드"라고 표시될 수 있지만 조각을 적절하게 배치하고 제작하려면 더 많은 힘이 필요할 수 있습니다.
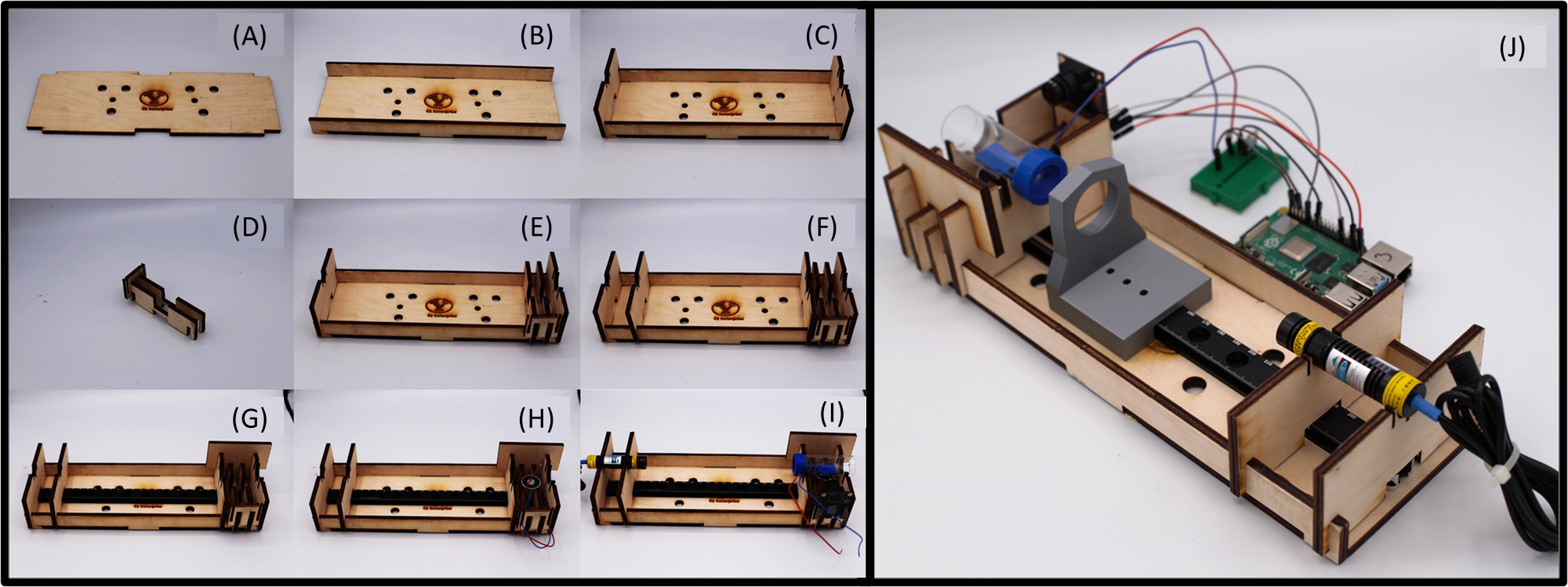
- Y 엠블럼이 위를 향하도록 베이스 조각을 아래로 놓습니다(그림 1A).
- 베이스의 양쪽에 있는 두 개의 긴 측면 조각을 잡고 첫 번째 레이저 홀더를 밀어 한쪽 끝에, 다른 쪽 끝에는 첫 번째 시험관 홀더를 놓습니다(그림 1B,C).
- 옆으로 떼어 두 전자석 홀더를 카메라 홀더에 밀어 넣습니다. 자석 홀더가 양쪽에서 ~1cm씩 분리되어 있는지 확인합니다(그림 1D).
- 자석 홀더와 카메라 홀더를 첫 번째 시험관 홀더 옆의 장치로 밀어 넣습니다. 따라서 시험관 홀더와 제1 전자석 홀더 사이에 1cm(전자석 홀더를 지나 카메라 홀더의 가장자리가 1cm의 기준 역할을 할 수 있음)(그림 1E).
주: 카메라 홀더와 차등 모두 소형 트랩핑 시스템의 기본 사용에 필요하지 않지만 둘 다 리그 설정의 균일성을 위해 권장됩니다.
- 자석 홀더와 카메라 홀더를 첫 번째 시험관 홀더 옆의 장치로 밀어 넣습니다. 따라서 시험관 홀더와 제1 전자석 홀더 사이에 1cm(전자석 홀더를 지나 카메라 홀더의 가장자리가 1cm의 기준 역할을 할 수 있음)(그림 1E).
- 다음으로, 두 번째 시험관 홀더와 두 번째 전자석 홀더 사이에 ~ 1cm 공간이 있도록 두 번째 시험석 홀더 뒤에 두 번째 시험관 홀더를 놓습니다.
참고: 두 개의 시험관 홀더 사이에는 전체적으로 ~4cm의 공간이 있습니다(카메라 마운트의 너비는 4cm, 위치 지정 기준).- 옵션 차광/차단기(보충 파일 5)를 사용하는 경우, 차광을 시험관 홀더의 반대쪽 끝과 카메라 홀더의 전자석 홀더로 밀어 넣습니다. 이것은 시험관과 전자석 홀더를 중심으로하고 정렬하는 데 도움이됩니다.
- 두 번째 레이저 홀더를 제자리에 밀어 넣으십시오. 정확한 거리는 필요하지 않습니다. 권장 거리는 3-4cm이지만 레이저의 길이에 따라 달라질 수 있습니다.
- 원하는 경우, 광학 레일( 재료 표 참조)을 모든 홀더 아래로 밀어 트래핑 시스템의 다른 요소를 정렬할 수 있습니다. 이는 렌즈를 레이저 및 시험관과 정렬하는 데 특히 유용합니다(그림 1G).
- 전자석( 재료 표 참조)을 전자석 홀더에 넣습니다(그림 1H).
3. 지정된 마이크로 컨트롤러 보드와 회로 연결
- 컴퓨터 모니터, 키보드 및 마우스를 마이크로 컨트롤러 보드에 꽂 습니다(자료표 참조). 마이크로 컨트롤러 보드를 시작하고 운영 체제가 작동하는지 확인합니다. 원하는 경우 VNC(가상 네트워크 연결)와 SSH(보안 셸)를 모두 선택할 수 있지만 원래 마이크로 컨트롤러 구성을 변경할 필요는 없습니다. 이렇게 하면 마이크로 컨트롤러에 원격으로 액세스할 수 있습니다.
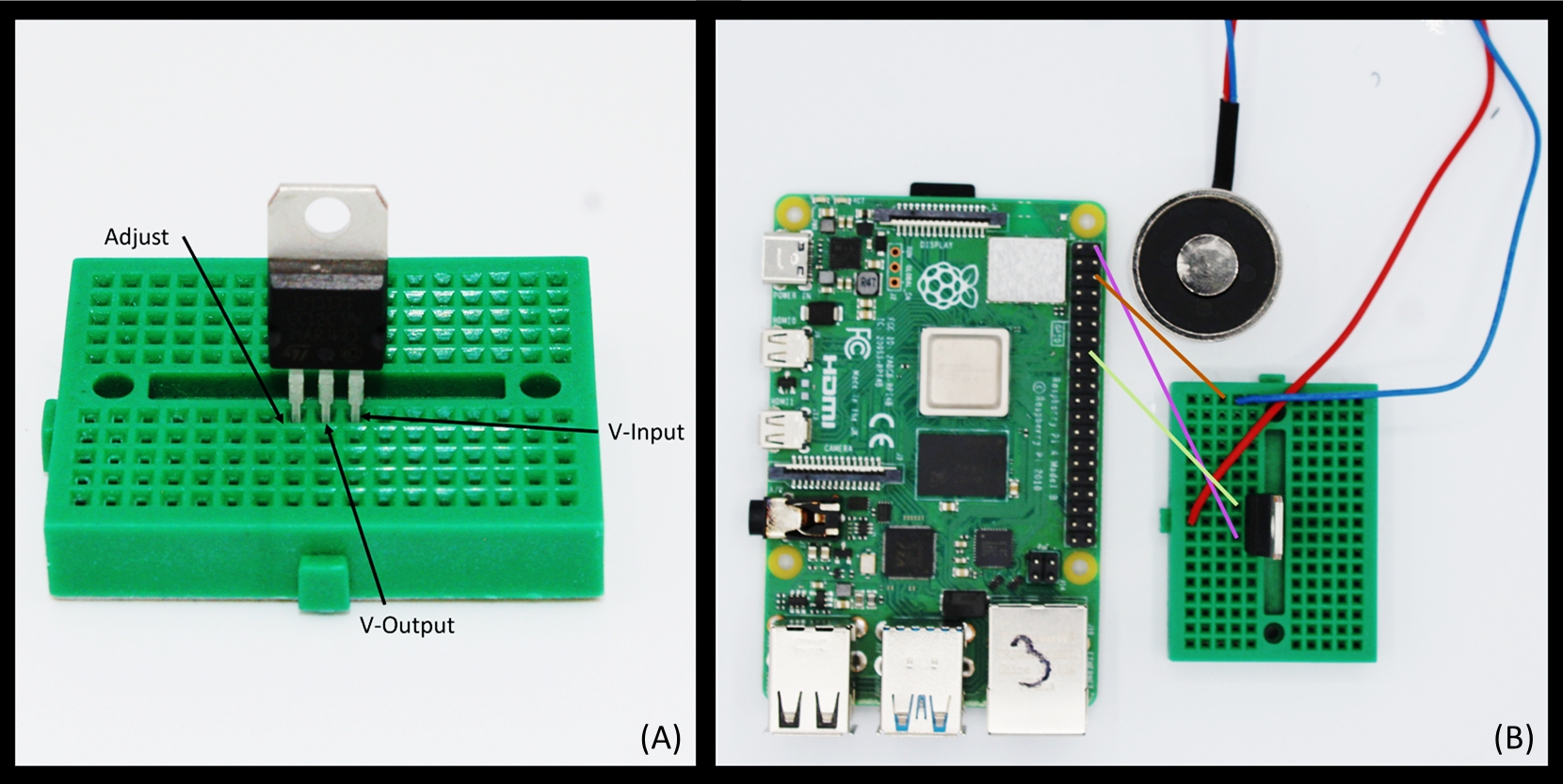
- 전압 조정기( 재료 표 참조), 브레드 보드 및 몇 개의 전선(그림 4A)을 사용하여 전자석 제어 회로를 구축하십시오.
주: 마이크로 컨트롤러 보드의 모든 핀 번호는 GPIO(범용 입력 및 출력) 핀입니다.- 전압 조정기를 브레드 보드에 배치하여 각 핀이 다른 행에 있도록 하여 올바르게 사용할 수 있도록 합니다.
- 전압 조정기의 입력 핀을 마이크로 컨트롤러 보드의 5V 전원 핀 중 하나에 연결하십시오.
- 전압 조정기의 조정 핀을 마이크로 컨트롤러 보드의 GPIO 23에 연결합니다.
- 전자석의 입력 와이어를 전압 조정기의 출력 핀에 연결하십시오. 전자석의 출력 와이어를 마이크로 컨트롤러의 접지 핀에 연결한 후; 이것은 브레드 보드의 다른 행을 사용하여 추가 와이어를 사용하여 두 행을 연결할 때 가장 잘 수행됩니다.
4. 시스템 운영을 위한 코드 업로드
참고: 코드를 업로드하려면 4.1 단계 또는 4.2 단계를 따라야합니다. 4.1단계에서는 카메라를 사용하지 않는 간단한 버전의 코드에 대한 지침을 제공합니다. 4.2단계에서는 카메라를 사용하는 버전에 대한 지침을 제공합니다.
- 보충 파일 6에 제공된 지침에 따라 단계를 수행하십시오.
- 터미널을 열고 필요한 파일을 저장할 위치로 이동합니다. 터미널 명령 'mkdir' 다음에 원하는 디렉토리 이름을 입력하여 마이크로 컨트롤러 보드에 새 디렉토리를 작성하십시오. 이 디렉토리는 트랩 리그를 실행하기 위한 파일을 저장하는 데 사용됩니다.
- 보충 파일 6을 새 디렉토리에 삽입하십시오. 자세한 내용은 파일의 시작 섹션에 있는 추가 정보 섹션을 참조하십시오. 테스트 번호를 원하는 양으로 변경하면 프로그램을 실행할 준비가 된 것입니다.
참고: 이 파일에는 한 번에 수행할 테스트 수를 제어하는 num_tries라는 하나의 필수 변수가 포함되어 있습니다. 이 파일에는 항상 몇 번의 일시 중지가 포함되어 있으므로 더 빠른 테스트를 위해 단축 할 수 있습니다.
- 아래 단계에 따라 마이크로 컨트롤러 보드에서 SQLite를 실행하고 봅니다. 이를 위해서는 보충 파일 7-11 과 카메라 및 관련 전문 지식이 필요합니다.
- 터미널 'Sudo apt-get install SQLite browser'와 'Sudo apt-get install sqlite3'를 입력하여 필요한 데이터베이스 라이브러리를 마이크로 컨트롤러 보드에 설치하십시오. 이렇게 하면 마이크로 컨트롤러 보드가 보충 파일 9를 사용하여 테스트의 모든 데이터를 자동으로 저장할 수 있습니다.
- 보충 파일 11, 카메라의 main.py 카메라 스크립트를 저장합니다. 이 작업은 파일 탐색기 또는 카메라용으로 개발된 통합 개발 환경(IDE)을 통해 수행할 수 있습니다(자료 표 참조).
참고: IDE는 사용자가 카메라의 출력을 볼 수 있게 해주기 때문에 권장되며, 이는 카메라의 초점이 올바르게 맞춰지고 있는지 확인할 때 도움이 됩니다. - 카메라를 마이크로 컨트롤러 보드에 연결합니다. 카메라의 접지 핀을 포함하여 4개의 핀을 사용합니다. 마이크로 컨트롤러 보드의 접지에 필요한 접지 핀을 연결합니다. 다음 핀은 아래에 언급 된 바와 같이 일치해야합니다.
- 카메라 핀 8을 GPIO 19에 연결: 이 핀은 각 트랩의 결과를 파이로 다시 보냅니다.
- 카메라 핀 9를 GPIO 17에 연결: 이 핀은 카메라에 검색을 시작할 수 있는 권한을 부여합니다.
- 카메라 핀 7을 GPIO 5에 연결: 카메라 상태 핀입니다.
- 모든 파일을 저장할 디렉터리를 만듭니다. 이 디렉터리를 만든 후 보충 파일 7-10 에 제공된 대로 파일을 디렉터리에 저장합니다. readme.txt, main.py, electromagnet.py 및 test_insert.py의 이름을 각각 바꿉니다.
- 보충 파일 7 (ReadMe.txt)을 읽으십시오.
참고: 추가 정보 파일은 각 파일이 수행하는 작업과 데이터베이스의 디렉터리 경로와 같이 각 파일에 필요할 수 있는 변경 사항에 대한 좋은 설명을 제공합니다. - 4.2.1단계에서 설치된 데이터베이스 뷰어를 엽니다. 새 데이터베이스 단추를 클릭하고 데이터베이스를 다른 파일과 동일한 디렉토리에 저장합니다. 새 데이터베이스는 test_insert.py에 있는 데이터베이스 파일의 이름과 일치해야 합니다.
- 데이터베이스 내에서 새 데이터베이스 내부에 테이블을 만들어 데이터를 저장합니다. 데이터베이스에는 5개의 필드, parameter_type, 트랩, 테스트 이름, testnum 및 rigID가 있습니다.
참고: 테이블 섹션은 지정된 대로 정확해야 하며, 그렇지 않으면 Main.py 및 test_insert.py에서 더 많은 변경 사항을 적용해야 합니다.
5. 시험 준비
- 렌즈를 렌즈 홀더 안에 배치하여 렌즈를 준비합니다. 테스트 중에 렌즈가 홀더 내부에 있는지 확인하십시오. 여기에 뜨거운 접착제가 필요할 수 있습니다.
참고: 이 장비는 트랩핑 영역의 적절한 형성을 보장하기 위해 구형 이중 볼록을 사용해야 합니다. - 렌즈를 준비한 후(단계 5.1), 렌즈 홀더를 광학 레일 위에 놓고 레이저( 재료 표 참조)를 레이저 홀더에 놓습니다.
참고: 재료 목록에 제안된 레이저는 사용하기 전에 교정이 필요하지 않습니다. 안전 안경은 레이저를 사용할 때마다 착용해야합니다.- 렌즈와 레이저 또는 기타 광원을 사용하여 레이저의 초점을 찾고 초점이 전자석 위에 중앙에 위치할 때까지 렌즈 홀더를 광학 레일을 따라 밀어 넣습니다.
참고: 이 단계는 트래핑에 매우 중요합니다. 초점이 전자석 위에 집중되지 않으면 캔틸레버 플랫폼은 입자를 초점으로 올리지 않습니다. - 나중에 참조 할 수 있도록 나무 받침대에 연필로이 점을 표시하십시오.
참고: 각 렌즈에는 이미 초점 거리 측정이 함께 제공되지만 이러한 측정이 항상 정확하지는 않습니다.
- 렌즈와 레이저 또는 기타 광원을 사용하여 레이저의 초점을 찾고 초점이 전자석 위에 중앙에 위치할 때까지 렌즈 홀더를 광학 레일을 따라 밀어 넣습니다.
- 트래핑 인용 준비
- 레이저가 다시 제대로 꺼졌는지 확인하십시오.
- 뜨거운 접착제 총을 사용하여 전자석과 동일한 극성의 작은 버튼 자석 ( 재료 표 참조)을 플랫폼의 평평한 표면에 붙여서 전자석이 플랫폼을 격퇴시킵니다.
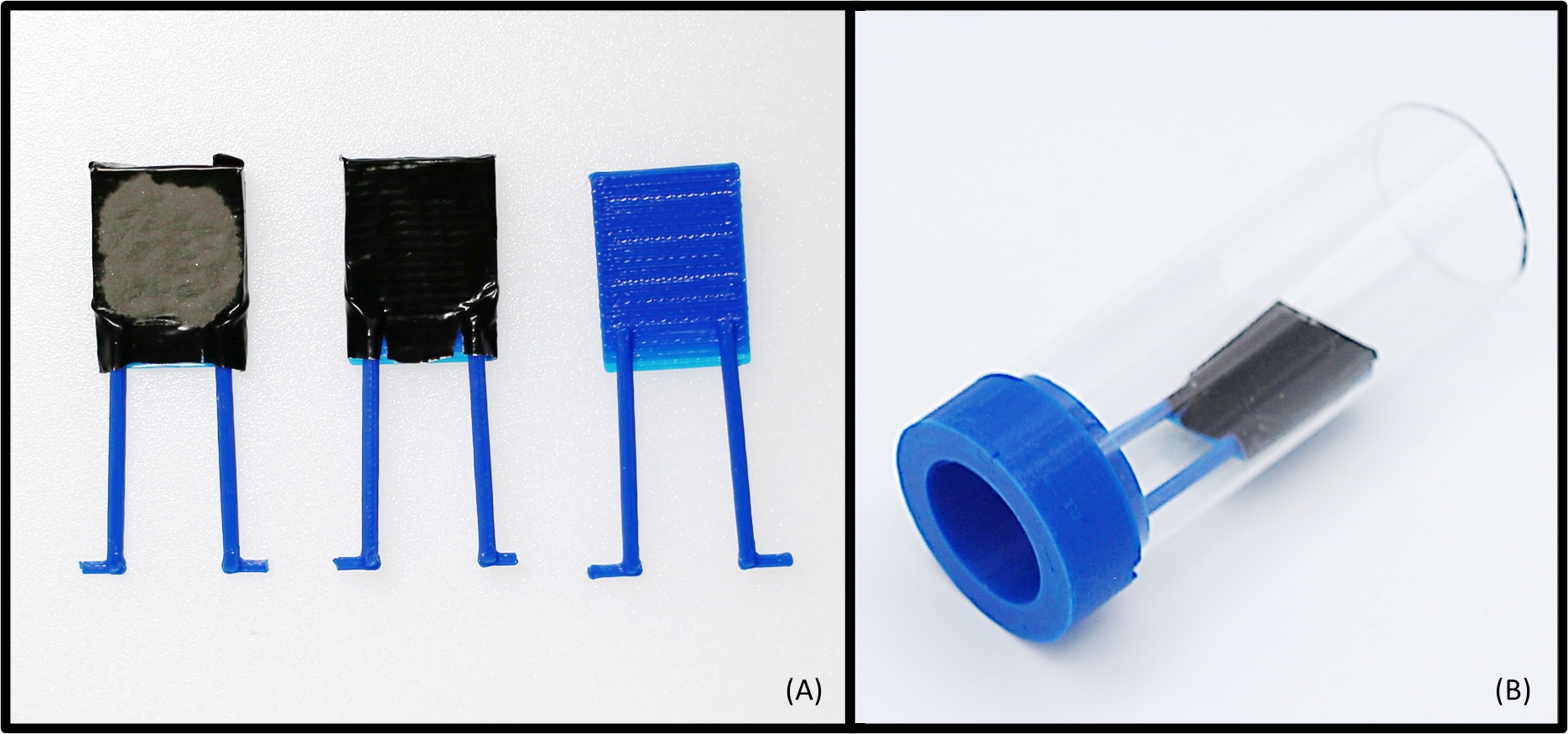
참고 : 자석의 극성은 플랫폼이 전자석에 의해 격퇴 될 수 있도록 적절하게 일치되어야하며, 입자를 레이저의 빔으로 밀어 넣어 트랩핑이 발생할 수 있도록해야합니다. - 3D 프린트 캔틸레버와 같은 플랫폼을 가져 와서 플랫폼이 녹지 않도록 보호하는 검은 알루미늄 호일에 플랫폼을 코팅하십시오.
참고: 일반 호일을 사용할 수 있지만 카메라 시스템을 사용하기에는 너무 많은 눈부심이 생깁니다. 카메라에서 잘 작동하는 검은색 호일 테이프( 재료 표 참조)를 사용해 보십시오(그림 5A). 호일은 다른 물질 테스트를 위해 쉽게 교체 할 수 있기 때문에 권장되지만 원하는 경우 유사한 제품을 사용할 수 있습니다. - 알루미늄 호일로 플랫폼을 덮은 후, 사용자가 테스트를 위해 선택한 입자 유형을 플랫폼의 기울어진 측면에 놓습니다 (입자 유형 옵션에 대한 재료 표 또는 그림 6A 참조).
- 캔틸레버 암을 원형 홀더에 부드럽게 삽입하여 자석 측면이 바깥쪽을 향하도록 합니다. 그런 다음 시험관을 동일한 홀더에 부드럽게 삽입하십시오. 이 작업이 올바르게 수행되면 자석이 유리에 거의 닿을 뻔합니다(그림 5B).
- 시험관을 시험관 홀더 위에 올려놓으면 플랫폼이 전자석 위에 집중되도록 합니다. 자석이 캔틸레버 플랫폼에 적절하게 부착되어 있다면, 캔틸레버는 전자석에 의해 반발되는 상향 위치에 있는 것처럼 보여야 한다.
- 카메라를 카메라 홀더에 배치하여 플랫폼 위/주변에서 발생하는 트랩을 캡처합니다. 그런 다음 다른 모든 위치를 다시 확인합니다(그림 1I-J).
6. 시험 시작
참고: 테스트를 위해 6.1 단계 또는 6.2 단계를 따라야합니다.
- 4.1 단계의 지침을 사용하는 경우 파일에서 시작 을 누르거나 터미널에서 정상적으로 파일을 시작하십시오.
- 4.2 단계의 지침을 사용하는 경우 아래에 언급 된 매개 변수로 터미널에서이 테스트를 시작하십시오.
- 터미널 명령을 사용하여 "python3 main.py test_num parameter_type exact_parameter"명령을 사용하여 적절한 디렉토리 내에서 파일 시스템을 한 번 실행하십시오. 파일 main.py 은 보충 파일 8에 제공됩니다.
- 원하는 테스트 수로 test_num 을 바꿉니다. Parameter_type 를 테스트에서 초점을 맞춘 매개 변수 유형으로 바꿉니다.
참고: 예를 들어, 어떤 구동 레이저가 최선인지 결정하기 위해 테스트가 수행되Parameter_type laser_power는 exact_parameter로 대체되고 는 현재 레이저의 광 출력 전력으로 대체됩니다.
결과
위의 프로토콜을 따르면 달성 된 주요 결과는 다양한 매개 변수를 신속하게 테스트 할 수있는 소형 광영동 트랩핑 리그를 만드는 것입니다. 지금까지 이 리그는 레이저 파워와 입자 유형의 두 가지 중요한 파라미터를 테스트하는 데 사용되어 왔습니다. 여러 소형 리그를 병렬로 운영함으로써 연구원은 훨씬 더 빠른 시간 내에 훨씬 더 큰 표본 크기의 데이터를 수집 할 수있었습니다.
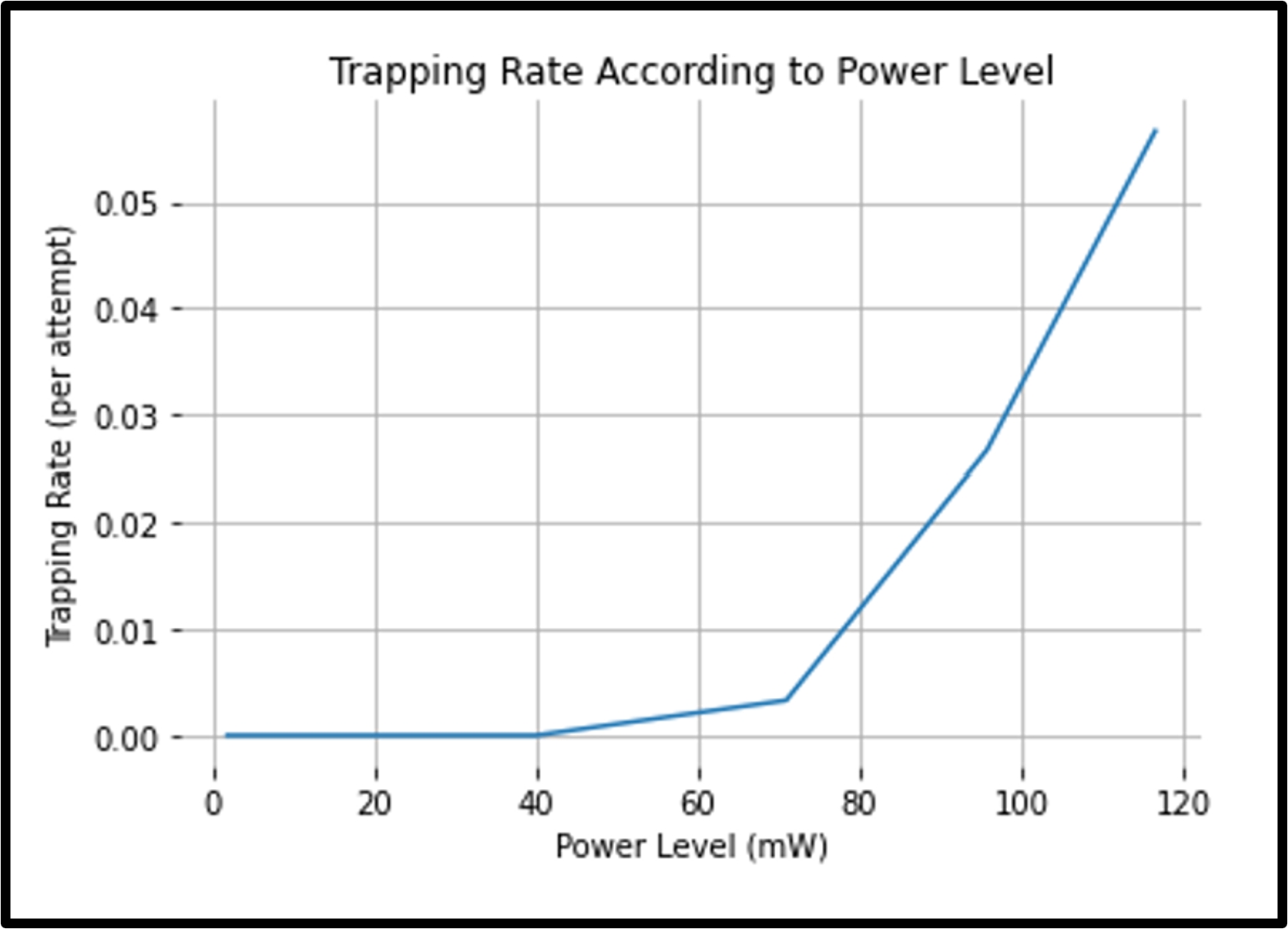
위의 프로토콜을 개발하는 동안 수행 된 첫 번째 테스트는 레이저 전력 테스트였습니다. 이 테스트에서 단일 소형 장비가 사용되었는데, 아직 개발되지 않았기 때문에 카메라 감지 시스템 없이 사용되었습니다. 대신 프로토콜의 4.1 단계가 사용되었습니다. 이를 위해서는 모든 트랩 탐지의 데이터 수집을 위해 연구원이 참석해야했습니다. 이 테스트의 목표는 트랩핑이 발생하기에 이상적인 레이저 출력 출력을 결정하는 것이었습니다. 레이저 및 렌즈 사이에 광학 감쇠기(가변 중립 밀도 필터)를 리그 상에 배치함으로써, 레이저의 광학적 파워를 변화시켰다. 도 7은 본 실험의 결과를 나타낸 것이다. 높은 광 출력 출력은 더 높은 트래핑 속도와 일치했습니다. 최대 전력의 레이저는이 테스트에서 가장 높은 기록 된 트래핑 속도를 가졌습니다. 그러나, 이 시험은 ~120 mW의 최대 광력을 가진 하나의 레이저로 제한되었다.
두 번째 테스트는 어떤 물질이나 물질이 가장 높은 포획 속도를 갖는지 결정하는 것이 었습니다. 이 테스트는 카메라 감지 시스템이 없는 단일 소형 테스트 장비를 사용하여 수행되었습니다. 10개의 상이한 입자들이 각 입자에 대해 100번의 시도의 샘플 크기로 시험되었다(시험된 모든 물질은 그들의 설명과 함께 물질의 표 에서 찾을 수 있다). 표본 크기는 연구자가 데이터 수집을 위해 각 시도를 지켜 볼 필요가 있기 때문에 100으로 제한되었습니다. 필요한 모든 데이터는 근무일 기준 이틀 만에 수집되었습니다. 도 6A는 입자 유형 시험의 결과를 나타낸다. 테스트 된 10 가지 재료 / 입자 유형 중 다이아몬드 나노 입자 (55-75 %)와 프린터 토너가 각각 14 %와 10 %의 비율로 두 가지 최상의 입자 유형임을 발견했습니다 (표 1).
처음 두 번의 테스트 후, 연구자들은 테스트 중에 능동적 인 관찰이 필요한 단일 장비로 제한되었다고 느꼈습니다. 이로 인해 프로토콜에 설명 된 4.2 단계가 발생했습니다. 이 옵션에는 카메라 감지 시스템이 포함되어 있어 사용자가 한 번에 여러 개의 소형 테스트 리그를 실행할 수 있으며 테스트를 위해 사용자가 참석할 필요가 없습니다.
이 새로운 카메라 시스템을 테스트하기 위해 입자 유형 테스트의 수정 된 재 테스트가 수행되었습니다. 이 새로운 입자 유형 테스트를 위해 재시험하기 위해 처음에 사용된 10가지 입자 유형 중에서 단지 몇 가지 상이한 입자 유형만이 선택되었다. 선택된 입자들은 새로운 테스트를 거쳤다. 4개의 미니어처 테스트 리그의 테스트 리그 "팜"을 사용하여, 선택된 각각의 입자는 4,000회 시도의 총 시험 샘플 크기를 가졌다. 다시 한번, 필요한 모든 데이터가 평일 전체 2일 내에 수집되었다(표 2). 이 파티클 타입 재테스트의 주요 목적은 새로운 카메라 시스템을 테스트하는 것이었습니다. 이 테스트를 통해 초기 입자 유형 테스트의 결과와 트랩을보고하는 연구원의 결과를 카메라 감지 시스템의 결과와 비교할 수있었습니다. 테스트 결과는 원래 테스트와 약간 달랐지만 여전히 비슷했습니다(그림 6B). 초기 테스트에서 가장 좋은 입자 유형 인 다이아몬드 나노 입자 55-75 %는 여전히 재 테스트에서 최고였지만 이전보다 약간 낮은 포획 속도를 보였습니다. 결과의 차이는 더 큰 샘플 크기와 불완전한 카메라 감지 시스템 때문일 가능성이 큽니다. 이 입자 테스트의 결과는 예상과 약간 다르지만 레이저 파워 또는 렌즈 초점 거리와 같이 재료가 일정하게 유지되는 다른 매개 변수를 테스트 할 때 카메라 스크립트에서 수집 한 결과는 신뢰할 수 있습니다.
수행 된 세 가지 테스트 모두 수행 된 리그와 관련이 있지만 데이터에서 발견 된 추세는 다른 더 정확한 광영동 테스트 리그에서 테스트 할 때 사실임이 입증됩니다. 소형 테스트 리그는 다른 테스트 리그를 완전히 대체하기 위한 것이 아닙니다. 그럼에도 불구하고, 연구원들이 에디소니언 (시행 착오) 테스트에서 모든 매개 변수와 가능성을 신속하고 효율적으로 탐구하여보다 정확한 리그에 대한 추가 연구를위한 추세와 발견을 찾을 수 있도록하기위한 것입니다.

그림 1: 완성된 소형 광영동 테스트 장비를 사용한 리그 진행 그림은 2단계 및 해당 하위 단계에 해당합니다. (A) 2.1단계를 표시합니다. (B) 2.2 단계, 두 개의 긴 측면이있는 바닥을 시연합니다. (C) 2.2 단계, 리그 프레임, 양면이있는베이스, 첫 번째 레이저 홀더 및 시험관 홀더를 보여줍니다. (d) 단계 2.3은 두 전자석 홀더와 결합된 카메라 홀더를 보여준다. (E) 단계 2.3.1은 도 1C, D. (F) 단계 2.4, 제2 시험관 홀더 및 제2 레이저 홀더의 조합을 제공한다. (G) 선택적인 차광과 광학적인 가로장이 추가되었다. (H) 전자석은 홀더에 배치됩니다. (I) 레이저와 시험관이 홀더에 배치되었습니다. (J) 이것은 마이크로 컨트롤러 보드의 전원없이 완료된 전체 테스트 tig를 보여줍니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 2: 3D 인쇄 조각. 이 그림에는 렌즈 홀더, 원형 플랫폼 홀더 및 캔틸레버 플랫폼이 포함되어 있습니다. 3D 인쇄 렌즈 홀더의 디자인은 보충 파일 1에서 찾을 수 있습니다. 이 렌즈 홀더는 인쇄 할 때 직경 30mm의 렌즈 용입니다. 보충 파일 2-3 에는 플랫폼 홀더 및 플랫폼에 대한 디자인이 포함되어 있습니다. 플랫폼 홀더에는 플랫폼이 사용할 수 있는 네 개의 세트가 있지만 장비가 설계된 대로 작동하려면 플랫폼이 그림에 표시된 구멍을 사용해야 합니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 3: 레이블이 지정된 레이저 절단 조각. 이 그림은 옵션 라이트 실드를 제외한 모든 레이저 컷 조각에 대한 파일이 들어 있는 보충 파일 4의 조각에 레이블을 지정합니다. 인쇄 후에는 1 개의베이스, 2 면, 2 개의 레이저 홀더, 2 개의 시험관 홀더, 2 개의 전자석 홀더 및 2 개의 카메라 홀더 (단 하나의 필요)가 있어야합니다. 옵션 라이트 실드는 보충 파일 5에서 찾을 수 있습니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 4: 전압 조정기 및 전자석 회로. (A) 참조로, 회로를 구축할 때. 전압 조정기에는 3개의 핀, 조정, 입력 및 출력이 있습니다. (B) 이 그림은 단계 3에서 설명된 완료된 회로를 보여준다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 5 : 플랫폼 준비 및 시험관 트랩 인용. (A) 테스트를 수행하기 전에 플랫폼을 준비해야합니다. 레이저가 입자를 집어 들기 위해 빛날 입자의 저장소는 테스트 직전에 플랫폼에 배치됩니다. 검은 알루미늄 호일은 입자 전에 플랫폼에 놓아야합니다. 이것은 레이저가 플랫폼을 통해 녹는 것을 방지합니다. (B) 시험 도중, 입자의 실제 포획은 시험관 내에서 발생하며, 각 트랩 시도에 대해 플랫폼의 일관된 자동 운동을 보장한다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 6: 입자 유형 테스트(수동) 및 (카메라) (a) 가장 좋은 포획 속도를 가진 입자를 찾기 위해 10 개의 다른 입자에 대한 테스트를 수행했습니다. (B) 두 번째 입자 유형 테스트는 카메라 감지 시스템으로 수행되었다. 원래 10 개의 입자 중 4 개만 테스트되었습니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}

그림 7: 레이저 전력 테스트 결과 상이한 레이저 출력 레벨에 대한 트래핑 속도는 레이저 파워 테스트 동안 측정되었다. 더 높은 힘은 더 높은 포획 속도를 낳았다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
{kind=link}
| 블랙 주류 (분말) | 블랙 주류 (페이스트) | 텅스텐 (12 미크론) | 텅스텐 (1-5 미크론) | 알루미늄 분말 | 프린터 토너 | 석묵 | 다이아몬드 나노 입자 (95%) | 다이아몬드 나노 입자 (55-75%) | 니그로신 | ||
| 1 | 2 | 2 | 1 | 0 | 3 | 2 | 1 | 5 | 2 | ||
| 1 | 3 | 2 | 0 | 1 | 2 | 1 | 2 | 3 | 1 | ||
| 2 | 1 | 1 | 1 | 0 | 3 | 1 | 1 | 3 | 1 | ||
| 2 | 1 | 0 | 2 | 0 | 2 | 0 | 1 | 3 | 0 | ||
| 6 | 7 | 5 | 4 | 1 | 10 | 4 | 5 | 14 | 4 | ||
| 6.00% | 7.00% | 5.00% | 4.00% | 1.00% | 10.00% | 4.00% | 5.00% | 14.00% | 4.00% | ||
표 1: 최상의 포획 속도를 가질 수 있는 입자 유형 시험의 결과. 100번의 시도의 총 표본 크기는 각 재료에 대해 25개의 4개 세트에서 수행되었다.
| 블랙 주류 페이스트 | 다이아몬드 나노 입자 55-75 % | 석묵 | 텅스텐 (12 미크론) |
| 2.10% | 11.70% | 10.60% | 6.40% |
표 2: 카메라 검출 시스템으로 실시한 입자형 시험의 결과. SQLite 데이터베이스에서 수집 된 데이터. 데이터는 재료당 4000개의 표본 크기에 대해 1000개의 4개 세트로 초기에 컴파일되었습니다. 각 세트에 대한 개별 레코드는 SQLite에서 컴파일되지 않았습니다. 총 백분율만 컴파일되었습니다.
보충 파일 1: File_1-렌즈 홀더.stl. 여기에는 렌즈 홀더에 대한 3D 인쇄 파일이 들어 있습니다( 그림 2 참조). 이 파일을 다운로드하려면 여기를 클릭하십시오.
보충 파일 2: File_2-platform.stl. 여기에는 캔틸레버 플랫폼에 대한 3D 인쇄 파일이 포함되어 있습니다( 그림 2 참조). 이 파일을 다운로드하려면 여기를 클릭하십시오.
보충 파일 3: File_3-플랫폼 보유자.stl. 여기에는 플랫폼 홀더에 대한 3D 인쇄 파일이 포함되어 있습니다( 그림 2 참조). 이 파일을 다운로드하려면 여기를 클릭하십시오.
보충 파일 4 : File_4 리그 Pieces.odg. 여기에는 리그 조각에 대한 레이저 절단 파일이 포함되어 있습니다(그림 1 및 그림 3 참조). 이 파일을 다운로드하려면 여기를 클릭하십시오.
보충 파일 5 : File_5 라이트 쉴드.odg. 여기에는 옵션 인 차등 / 차단기를위한 레이저 절단 파일이 포함되어 있습니다. 이 파일을 다운로드하려면 여기를 클릭하십시오.
보충 파일 6 : File_6-Opt1.system.py. 여기에는 4.1단계의 명령 사용에 대한 전체 코드가 포함되어 있습니다. 이 파일을 다운로드하려면 여기를 클릭하십시오.
보충 파일 7 : File_7-Opt2.Read Me .txt. 여기에는 보충 파일 8-11에 대한 몇 가지 세부 정보가 포함된 추가 정보 파일이 포함되어 있습니다. 이 파일을 다운로드하려면 여기를 클릭하십시오.
보충 파일 8 : File_8-Opt2.main.py. 여기에는 4.2단계에서 찾은 지침에 대한 기본 스크립트가 포함되어 있습니다. 이 파일을 다운로드하려면 여기를 클릭하십시오.
보충 파일 9 : File_9-Opt2.electromagnet.py. 여기에는 전자석을 제어하는 단계 4.2에 대한 스크립트가 포함되어 있습니다. 이 파일을 다운로드하려면 여기를 클릭하십시오.
보충 파일 10 : File_10-Opt2.test_insert.py. 여기에는 데이터베이스에 데이터를 자동으로 업로드하는 4.2단계의 스크립트가 포함되어 있습니다. 이 파일을 다운로드하려면 여기를 클릭하십시오.
보충 파일 11 : File_11-Opt2.camera_controller.py. 여기에는 4.2.2 단계에서 카메라에 업로드해야 하는 스크립트가 포함되어 있습니다. 이 파일을 다운로드하려면 여기를 클릭하십시오.
토론
본 프로토콜에는 트랩핑 장비의 자동 실행에 중요한 몇 가지 필수 단계가 포함되어 있습니다. 첫째, 전자석은 지정된 회로를 통해 마이크로 컨트롤러 보드에 적절하게 부착되어야합니다. 전자석이 없으면 소형 테스트 장비의 전체 유용성이 손실됩니다. 전자석은 캔틸레버 플랫폼의 입자 저장소를 레이저의 경로로 올려 각 포획 시도를 제어합니다. 각 트랩 시도는 플랫폼을 올리고 내리는 또 다른 사이클입니다.
카메라는 프로토콜에 설명된 대로 4.2단계에서만 사용되지만 이 옵션에는 매우 중요합니다. 4.2단계에서는 카메라가 파티클이 갇혀 있는지 감지해야 하며, 이를 통해 여러 리그에서 데이터를 수집할 수 있습니다. 카메라가 올바르게 연결되지 않으면 장비가 트래핑을 시도할 수 없습니다.
세 번째이자 가장 중요한 단계인 5.2.1단계는 레이저를 정렬하고 초점을 맞추는 것입니다. 초점이 전자석 위에 발생하도록 렌즈를 배치해야 합니다. 캔틸레버 플랫폼은 전자석 위의 초점을 통과하여 입자가 트랩 될 수 있도록합니다. 초점이 전자석의 중간 위에 중심을 두지 않는다고 가정합니다. 이 경우 입자를 운반하는 캔틸레버 플랫폼이 초점을 통과하여 트랩을 만드는 것이 어려워집니다. 이로 인해 함정이 부족해질 수 있습니다. 또한 레이저 경로가 플랫폼에 지속적으로 접촉하지 않도록 플랫폼이 전자석 위로 상승하는 것이 중요합니다. 이로 인해 카메라가 가양성을 보고할 수 있습니다. 초점의 위치를보다 쉽게 조정하려면 리그 설정에 광학 레일을 사용하는 것이 좋습니다. 이렇게 하면 렌즈 홀더를 앞뒤로 쉽게 밀어 초점을 올바르게 배치할 수 있습니다. 레이저 및 시험관 / 캔틸레버 부품은 장비가 적절하게 제작 된 경우 이미 정렬되어 있습니다. 광학 레일을 사용하면 렌즈가 다른 부분과 정렬됩니다.
두 가지 개별 옵션이 프로토콜, 단계 4.1 및 단계 4.2에 자세히 설명되어 있습니다. 첫 번째 옵션인 4.1단계는 미니어처 태핑 리그를 실행하는 원래의 간단한 방법입니다. 이 옵션은 카메라 시스템 대신 인간의 눈에 의존하여 입자를 감지합니다. 이 옵션은 더 작은 데이터 집합을 빠르게 수집하거나 라이브 데모가 필요한 상황에서 수집하는 데 가장 적합합니다. 첫 번째 옵션은 두 번째 옵션이 만들어지기 전에 처음 두 실험 중에 사용되었습니다. 두 번째 옵션인 4.2단계는 자동 감지 및 트래핑을 위해 카메라를 사용하여 사람의 감독 없이 수천 개의 테스트를 실행하고 데이터베이스에 입력할 수 있도록 합니다. 카메라의 정확도는 정확한 테스트 조건에 따라 다릅니다. 특정 더 반사 재료는 테스트 할 때 인간 탐지로 수행 된 유사한 테스트와 비교할 때 덜 정확한 포획 속도를 갖는 것으로 나타났습니다. 그러나 카메라 스크립트의 여러 매개 변수를 변경하여 카메라의 정확도를 높일 수 있습니다. 카메라의 정확한 정확도는 향상시킬 수있는 것이지만 소형 리그는 초기 테스트를위한 것이므로 중요한 관심사는 아닙니다. 두 번째 옵션은 단일 마이크로 컨트롤러 보드에서 두 개의 테스트 리그를 실행하도록 쉽게 수정할 수도 있습니다. 해당 수정에 대한 자세한 내용은 보충 파일 7에 포함되어 있습니다.
현재 작업은 기계 학습을 통해보다 정확하고 일관된 형태의 자동 트랩 감지를 개발하고 있습니다. 이 새로운 기계 학습 탐지 시스템은 완료되면 컨볼루션 신경망을 사용하여 훨씬 높은 정확도 (95 % 이상)로 갇힌 입자를 더 잘 감지하여 이러한 소형 테스트 장비가 광영동 트랩 디스플레이 연구의 미래에 미칠 수있는 사용과 효과를 더욱 강화합니다.
현재의 기본 형태에서, 소형 트래핑 장비는 몇 가지 방법으로 제한됩니다. 이러한 소형 리그는 트랩이 발생한 후 파티클을 스캔하여 실제 OTD를 생성할 수 없습니다. 이 설계는 또한 스캐너가 OTD 제작에 향후 사용할 수 있도록 추가될 가능성을 제한합니다. 설계의 또 다른 한계는 특정 테스트가 발생하기 위해 추가 구성 요소가 필요하다는 것입니다. 예를 들어, 가변 광학 감쇠기를 사용하여 레이저 전력 테스트 동안 서로 다른 광 출력 전력 레벨에서 데이터 세트를 수집했습니다. 마찬가지로, 연구자가 향후 테스트에서 레이저 파장을 테스트하기를 원한다면,이 작업에 사용 된 레이저 외에도 다른 파장을 가진 유사한 광학적 힘을 가진 몇 가지 다른 레이저가 필요할 것입니다. 이 장비는 각 레이저를 고정하기 위해 추가 수정이 필요할 가능성이 높으며,이 프로세스는 그러한 테스트를 수행 할 수있는 속도를 제한하지만 여전히 가능합니다. 이 설계는 또한 각 렌즈에 대해 새로운 렌즈 홀더를 3D 인쇄해야 할 필요성에 따라 결정됩니다. 설계 및 적용은 또한 구형 이중 볼록 렌즈로 제한되며, 구형 수차를 생성하여 트랩핑이 발생할 수있는 영역을 형성합니다.
앞으로, 미래의 응용 분야에는 광영동 트랩핑 파라미터의 지속적인 테스트 및 최적화가 포함됩니다. 위에서 간략하게 언급했듯이 소형 트래핑 장비는 y축 및 x축 제어를 위한 스캐너를 추가하여 기본 저렴한 OTD 시스템으로 쉽게 수정할 수 있습니다. 소형 트래핑 장비에 사용되는 전자석 제어 입자 전달은 향후 첨단 OTD 시스템에서도 구현될 수 있습니다.
소형 트래핑 장비는 저렴하고 신속하게 제조 될 수 있기 때문에이 연구 분야에서 궁극적으로 독특하고 뚜렷하며 신속한 대량 테스트가 가능합니다. 이 리그는 광영동 트랩핑 파라미터의 초기 테스트 및 최적화를 위해 설계된 린 시스템입니다. 개별 장비는 시간당 ~ 250회 시도의 속도로 테스트할 수 있습니다. 다른 많은 유형의 광영동 트랩핑 시스템 또는 리그는 더 나은 자동 시스템을 갖거나 입자를 스캔하여 성공적인 트랩 후 이미지를 생성함으로써 더 많은 것을 성취하기 위해 개발되었습니다1,8. 이러한 소형 트래핑 시스템은 이러한 시스템의 사용을 대체하기위한 것이 아닙니다. 그들은 광영동 포획의 매개 변수와 조건을 신속하게 테스트하여 연구원이 좋은 광영동 포획을 만드는 이유를 더 잘 이해할 수 있도록하기위한 것입니다. 소형 트랩핑 장비는 광영동 트랩 연구를 민주화하고이 연구 분야에서 에디소니아 실험과 진보의 새로운 물결을 허용 할 것입니다.
공개
저자는 공개 할 것이 없습니다.
감사의 말
저자들은 국립 과학 재단의 재정 지원을 감사하게 인정합니다. NSF 어워드 ID-1846477.
자료
| Name | Company | Catalog Number | Comments |
| 1/4In Plywood | NA | Sized to fit in Laser-cutter (normally 1 x 1 ft) | |
| 3D FDM Printer | Raise 3D | Pro 2 | Any equivalent equipment would suffice |
| 3D Laser-cutter Printer | Glow Forge | Basic | Any equivalent equipment would suffice |
| 5V Power Supply | AC/DC Adaptor | ||
| Alumiunum Powder | bioWORLD | 10576 | APS 17-30 micron |
| Black Aluminum Foil Tape | LLTP BF255 (on Amazon) | other types of foil (black foil) can be used instead if desired | |
| Black Liquor | a recycled byproduct formed during the pulping of wood | ||
| Button Magnet | Mealos | 8 x 2 mm | |
| Class 3B Laser 405 nm (Tube Laser) | M-16A405-300-G | Any Optical Output Power and wavelength could be used for testing. For reproducing this work 405 nm and ~120 mW should be used | |
| Diamond Nanoparticles 55-75% | SkySpring Nanomaterials | 0512HZ | 55-75% purity, APS 4-15 nm |
| Diamond Nanoparticles 95% | SkySpring Nanomaterials | 0510HZ | 95% purity, APS 3-4 nm |
| Electromagnet | Wuxue Wn Fang Electric | WP-P25/20 | |
| Glass cutter | Dyna-cut | model 500-1 | any standard glass cutter or wet-cutter could be used |
| Graphite powder | AeroMarine Products | 325 Mesh, APS 44 microns | |
| Jumper Wires | Elegoo | Male to Female wires and Male to Male wires are needed | |
| Lens | Surplus Shed | L8435 | 32 mm Daimeter, 80 mm Focal Length. Any 32 mm lens will fit into current lens holder design |
| Nigrosin (Formalin-Nigrosin) | Innovating Science | IS5818 | 30 mL , actually found on Amazon |
| Open MV Camera | Open MV | M7 | Any equivalent Open MV camera should work |
| Open MV IDE | Open MV | optional free to download integrated development enviroment from OpenMV | |
| Optical Attenuator (Variable Neutral Density Filters) | THORLABS | NDC-100C-2 | |
| Optical Rail | THORLABS | RLA1200 | 12'' optical rail |
| Printer Toner (CISinks Universal Toner) | CISinks | TN420,TN450, TN540, TN660, TN720 Toner powder. Found on Amazon | |
| Raspberry Pi | Raspberry PI | Pi-4 Model B | Any Pi 3 or 4, model B or B+ should suffice (referenced in text as a microcontroller board) |
| Tungsten Powder 12 Micron | Alfa Aesar | 10401-22 | APS 12 micron |
| Tungsten Powder 1-5 Micron | Alfa Aesar | 10400-22 | APS 1-5 micron |
| USB to Micro USB cord | Any company/ model will suffice | ||
| Voltage Regulator | STMicroelectronics | LM317t |
참고문헌
- Smalley, D., et al. A photophoretic-trap volumetric display. Nature. 553 (7689), 486-490 (2018).
- Rohatschek, H. Direction, magnitude and causes of photophoretic forces. Journal of Aerosol Science. 16 (1), 29-42 (1985).
- Desyatnikov, A. S., Shvedov, V. G., Rode, A. V., Krolikowski, W., Kivshar, Y. S. Photophoretic manipulation of absorbing aerosol particles with vortex beams: theory versus experiment. Optics Express. 17 (10), 8201-8211 (2009).
- Ke, P. C., Gu, M. Characterization of trapping force in the presence of spherical aberration. Journal of Modern Optics. 45 (10), 2159-2168 (1998).
- Blundell, B. G. On the uncertain future of the volumetric 3D display paradigm. 3D Research. 8, 11 (2017).
- Smalley, D., Nygaard, E., Rogers, W., Gneiting, S. A., Qaderi, K. Progress on photophoretic trap displays. Frontiers in Optics / Laser Science. , (2018).
- Rogers, W., Laney, J., Peatross, J., Smalley, D. Improving photophoretic trap volumetric displays. Applied Optics. 58 (34), 363-369 (2019).
- Peatross, J., Smalley, D., Rogers, W., Nygaard, E., Laughlin, E., Qaderi, K., Howe, L. Volumetric display by movement of particles trapped in a laser via photophoresis. SPIE Proceedings. 10723, 02 (2018).
- Smalley, D., Poon, T., Gao, H., Kvavle, J., Qaderi, K. Volumetric Displays: Turning 3-D inside-out. Optics and Photonics News. 29 (6), 26-33 (2018).
- Shvedov, V. G., Hnatovsky, C., Rode, A. V., Krolikowski, W. Robust trapping and manipulation of airborne particles with a bottle beam. Optics Express. 19 (18), 17350-17356 (2011).
재인쇄 및 허가
JoVE'article의 텍스트 или 그림을 다시 사용하시려면 허가 살펴보기
허가 살펴보기더 많은 기사 탐색
This article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. 판권 소유