
Method Article
Enfoques pioneros específicos para el paciente para la cirugía de precisión mediante imágenes y realidad virtual
En este artículo
Resumen
Los avances en el tratamiento endovascular han reemplazado los procedimientos quirúrgicos abiertos complejos con opciones mínimamente invasivas, como el reemplazo de válvulas y la reparación de aneurismas. Este artículo propone el uso de modelos tridimensionales (3D) y realidad virtual para ayudar en el posicionamiento del arco en C, las mediciones de ángulos y la generación de hojas de ruta para la planificación de procedimientos de laboratorio de cateterismo neurointervencionista, minimizando el tiempo del procedimiento.
Resumen
El tratamiento endovascular de anomalías vasculares complejas desplaza el riesgo de los procedimientos quirúrgicos abiertos en beneficio de las soluciones de procedimientos endovasculares mínimamente invasivos. Los procedimientos quirúrgicos abiertos complejos solían ser la única opción para el tratamiento de una gran variedad de afecciones, como el reemplazo de válvulas pulmonares y aórticas, así como la reparación de aneurismas cerebrales. Sin embargo, debido a los avances en los dispositivos de colocación de catéteres y la experiencia del operador, estos procedimientos (junto con muchos otros) ahora se pueden realizar a través de procedimientos mínimamente invasivos administrados a través de una vena o arteria central o periférica. La decisión de pasar de un procedimiento abierto a un enfoque endovascular se basa en imágenes multimodales, que a menudo incluyen conjuntos de datos de imágenes 3D Digital Imaging and Communications in Medicine (DICOM). Utilizando estas imágenes en 3D, nuestro laboratorio genera modelos en 3D de la anatomía patológica, lo que permite el análisis previo al procedimiento necesario para planificar previamente los componentes críticos del procedimiento de laboratorio de cateterismo, a saber, el posicionamiento del arco en C, la medición en 3D y la generación de una hoja de ruta idealizada. Este artículo describe cómo tomar modelos 3D segmentados de patología específica del paciente y predecir posiciones generalizadas del arco en C, cómo medir mediciones bidimensionales (2D) críticas de estructuras 3D relevantes para las proyecciones de fluoroscopia 2D y cómo generar análogos de hoja de ruta de fluoroscopia 2D que puedan ayudar en el posicionamiento adecuado del arco en C durante los procedimientos de laboratorio de cateterismo.
Introducción
El tratamiento de los aneurismas intracraneales es un aspecto desafiante de la cirugía neurointervencionista, que requiere una planificación quirúrgica precisa para garantizar resultados óptimos para los pacientes. En los últimos años, la tecnología de realidad virtual (RV) se ha convertido en una herramienta prometedora para mejorar la planificación quirúrgica al proporcionar a los cirujanos acceso a modelos anatómicos inmersivos y específicos del paciente en un entorno virtual 3D 1,2,3,4,5,6,7,8 . Este artículo presenta un protocolo integral para el uso de imágenes médicas y segmentación, modelado 3D, planificación quirúrgica de realidad virtual y generación de hojas de ruta virtuales idealizadas para ayudar en la planificación quirúrgica para el tratamiento de aneurismas.
La combinación de estos pasos culmina en un enfoque de planificación quirúrgica virtual, lo que permite a los médicos sumergirse en un entorno virtual y obtener una comprensión integral de la anatomía única de un paciente antes de un procedimiento quirúrgico. Este enfoque inmersivo permite a los cirujanos explorar el posicionamiento óptimo y simular varios escenarios de procedimiento. El registro de estos escenarios puede proporcionar información sobre la ubicación de los equipos quirúrgicos del mundo real, como el posicionamiento del arco en C.
Además de los ángulos de posicionamiento, también es posible medir la anatomía en un entorno virtual utilizando herramientas de medición diseñadas para el espacio 3D. Estas mediciones pueden proporcionar información sobre el tamaño y la forma correctos del dispositivo que se utilizará en un caso de aneurisma intracraneal9.
Este protocolo presenta un proceso integral que combina a la perfección imágenes médicas, segmentación de imágenes, preparación de modelos de realidad virtual y generación de hojas de ruta quirúrgicas virtuales para mejorar el proceso de planificación quirúrgica. Utilizando una combinación de tecnologías de vanguardia, este protocolo brinda oportunidades para ahorrar un tiempo valioso en el quirófano10, así como un aumento de la confianza del cirujano y la comprensión de casos quirúrgicos complejos 11,12,13.
Protocolo
Los DICOM humanos no identificados o DICOM para la atención del paciente se utilizan de acuerdo con las pautas institucionales para la atención del paciente, la Ley de Portabilidad y Responsabilidad del Seguro Médico de 1996 (HIPAA) y la colaboración con la Junta de Revisión Institucional (IRB) cuando corresponda.
1.Anatomía específica del sector
- Adquisición de exploraciones médicas
- Comience el proceso de segmentación con un médico o cirujano que ordene exploraciones médicas. Estas exploraciones forman parte del protocolo estándar de atención al paciente y no introducen procedimientos adicionales.
- Si el médico sabe que solicitará la segmentación, asegúrese de que solicite conjuntos de datos en rodajas finas para exportarlos desde el escáner de resonancia magnética o tomografía computarizada. En la mayoría de los casos, estas rodajas finas tienen menos de 1 mm de grosor; Sin embargo, esta resolución puede variar entre escáneres. Realizar tomografías computarizadas con contraste para asegurar una segmentación adecuada de la vasculatura y los depósitos sanguíneos.
- Para la adquisición de datos, adquiera una secuencia 3D de resonancia magnética con los siguientes parámetros sugeridos: ejecutar en axial, asegurar el grosor del corte y el espacio entre cortes de 0,625 mm o menos, espaciado cero. Adquiera la serie CT 3D con los siguientes parámetros sugeridos: escáner de cortes en modo helicoidal, grosor de corte y espacio entre cortes de 0,625 mm, por ejemplo, Neuro: Kvp de 120, rango de mA inteligente de 100-740, velocidad de rotación a .5 ms, o Cardiaco: Kvp de 70, rango de mA inteligente de 201-227 (modo MA inteligente 226), velocidad de rotación a 0,28 ms14. Siga los parámetros helicoidales de la institución para cada parte del cuerpo.
NOTA: La secuencia 3D debe adquirirse de manera que en la reconstrucción haya una resolución casi isotrópica en los planos axial, coronal y sagital. En la mayoría de los casos, se deben adquirir las rodajas más finas. La secuencia 3D se ejecuta además del protocolo estándar de la institución para la obtención de imágenes. Sin embargo, se ejecuta al mismo tiempo, por lo que hay un mínimo de trabajo adicional, exposición a la radiación y gastos para el equipo clínico y el paciente.
- Para la adquisición de datos, adquiera una secuencia 3D de resonancia magnética con los siguientes parámetros sugeridos: ejecutar en axial, asegurar el grosor del corte y el espacio entre cortes de 0,625 mm o menos, espaciado cero. Adquiera la serie CT 3D con los siguientes parámetros sugeridos: escáner de cortes en modo helicoidal, grosor de corte y espacio entre cortes de 0,625 mm, por ejemplo, Neuro: Kvp de 120, rango de mA inteligente de 100-740, velocidad de rotación a .5 ms, o Cardiaco: Kvp de 70, rango de mA inteligente de 201-227 (modo MA inteligente 226), velocidad de rotación a 0,28 ms14. Siga los parámetros helicoidales de la institución para cada parte del cuerpo.
- Pídale al médico que solicite la segmentación del modelo, especificando qué anatomía será el foco central para el proceso de segmentación (un médico o cirujano generalmente completa este paso).
- Descargue los datos de escaneo y guárdelos localmente.
- Si se realizó más de un escaneo, asegúrese de que los conjuntos de datos DICOM del escaneo se comparen para determinar qué conjunto de escaneo tiene la configuración de corte más fino y el mejor contraste, ya que esto proporcionará los modelos 3D de mayor resolución cuando se segmenten.
- Una vez que se determine el mejor conjunto de imágenes, descárguelo de la base de datos de imágenes para su segmentación, anonimice o deje los datos como están con la información de salud protegida (PHI). Este protocolo funcionará con un DICOM anonimizado.
- Importe el conjunto de datos DICOM en el software de segmentación.
NOTA: El siguiente conjunto de instrucciones utiliza términos específicos del software de segmentación Materialise Mimics. Aunque Materialise Suite es un software basado en suscripción, existen alternativas de código abierto como 3DSlicer. Los nombres y la terminología de las herramientas pueden variar entre otras herramientas de segmentación. - Cree una máscara aproximada de la anatomía objetivo, como hueso, acumulación de sangre, aneurisma, etc.
- En la pestaña SEGMENTO , seleccione la herramienta Nueva máscara .
- Establezca los límites del umbral superior e inferior haciendo clic y arrastrando ambos para capturar la mayor cantidad posible de la anatomía objetivo relevante, al tiempo que se limita la captura de los tejidos circundantes. Haga clic y arrastre los límites dentro de la herramienta de umbral o ingrese la unidad Hounsfield (HU) deseada.
- Al establecer los umbrales, recorte a un área específica del escaneo para evitar la selección excesiva del tejido circundante. Los límites de los umbrales superior e inferior varían mucho según el tipo de exploración, el tipo de secuencia, la cantidad de contraste y el paciente.
- Haga clic en Aceptar para finalizar la máscara aproximada.
- Utilice otras herramientas dentro de la pestaña SEGMENTO para eliminar las partes innecesarias de la mascarilla o agregar el tejido faltante según sea necesario.
- Utilice la herramienta Crecimiento de región para separar todos los vóxeles de la máscara conectados directamente a un vóxel seleccionado por el usuario; use Editar máscara para agregar o eliminar vóxeles en la máscara a través de las ventanas 2D y 3D; utilice Edición de sectores múltiples para agregar o eliminar vóxeles a través de la interpolación entre sectores más separados; y utilice Rellenar agujeros o Relleno inteligente para rellenar agujeros de un tamaño definido por el usuario dentro de la máscara.
- Continúe refinando la máscara haciendo uso de las herramientas de la pestaña hasta que la interpolación de 2D a 3D sea lo más precisa posible.
- Repita los pasos 1.5 y 1.6 para todas las anatomías objetivo.
- Consulte a un médico sobre la segmentación completada para garantizar la precisión.
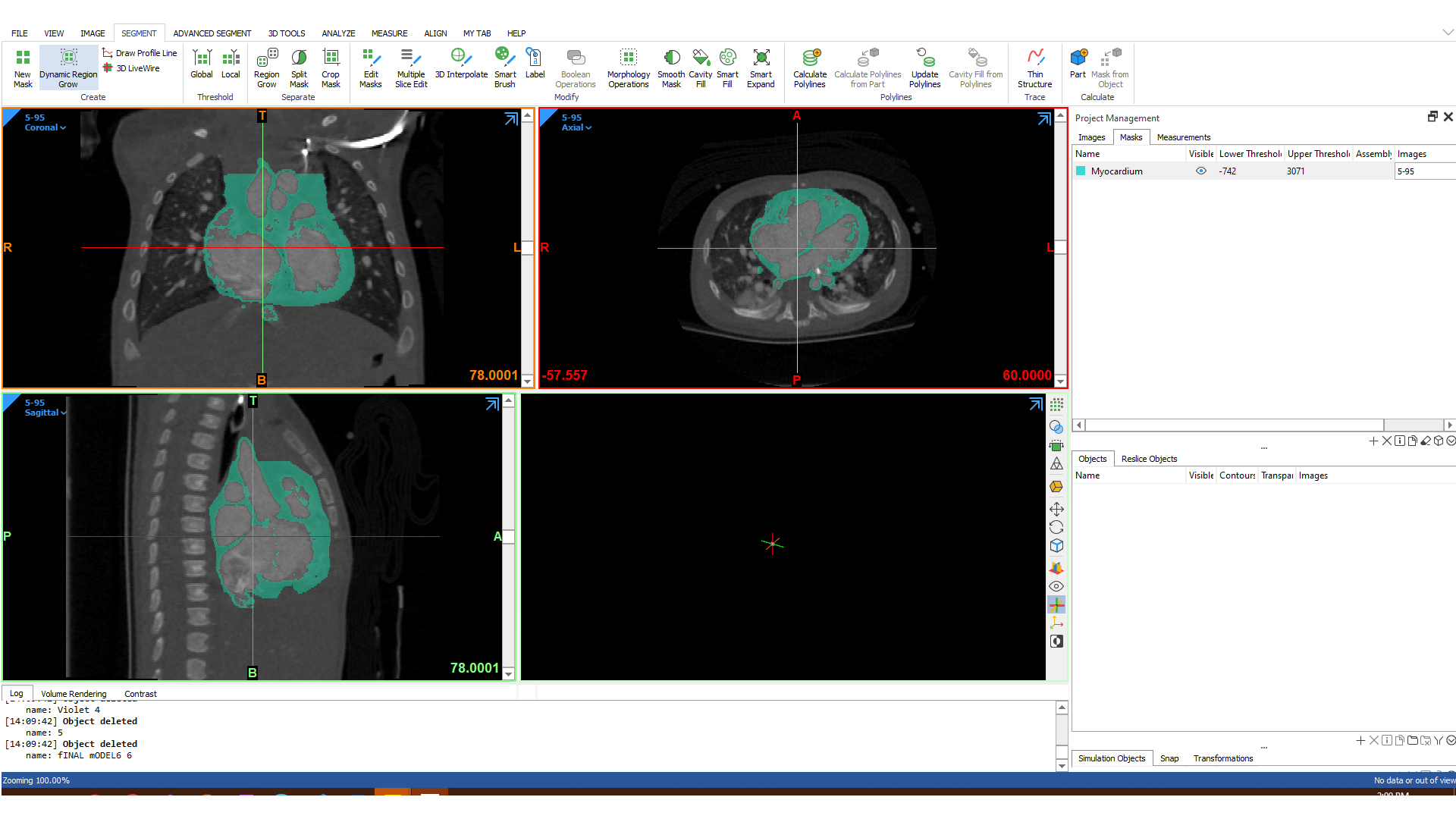
- Muestre las máscaras completas a un médico para asegurarse de que no se haya omitido anatomía importante y que no se haya incluido el exceso de anatomía. En la mayoría de los casos, consulte al médico que solicita la segmentación para el control de calidad. El médico se asegura de que la porción del DICOM resaltada por la mascarilla en cada corte sea lo más precisa posible (véase la figura 1).
- Segmentación de exportaciones para su posterior procesamiento.
- Convierta las máscaras finalizadas en piezas utilizando la herramienta Calcular pieza ubicada en el menú Gestión de proyectos en el lado derecho.
- Exporte piezas calculadas a archivos 3D haciendo clic con el botón derecho en la pieza y seleccionando Exportar STL.
2. Preparar el modelo para la realidad virtual
- Crea un nuevo proyecto de Blender y elimina los elementos de escena predeterminados. Presione la tecla a para resaltar todos los elementos visibles y, a continuación, x seguido de Intro para eliminarlos de la escena.
NOTA: Blender es un software de modelado gratuito y de código abierto. Si bien otro software de modelado puede realizar las mismas tareas, la terminología utilizada en este paso será específica de Blender. - Importe los archivos de anatomía a través de Archivo > Importar > Stl (.stl).
- Alinear la anatomía del paciente con el origen del mundo.
- Seleccione toda la anatomía del paciente para mantener la posición relativa. Para hacer esto, presione la tecla a después de importar todos los archivos.
- Utilice las herramientas Mover y Rotar para alinear la anatomía con el origen del mundo. Asegúrese de que la nariz del paciente esté alineada con un eje, con el eje perpendicular en contacto con el área de la oreja y la parte superior del cráneo, respectivamente. Utilice vistas ortográficas, que se pueden activar con el widget en la esquina superior derecha de la interfaz de Blender.
- Importe el transportador de realidad virtual y alinéelo con la anatomía del paciente. Este transportador ha sido especialmente diseñado por el equipo de ingeniería de OSF para ayudar a adquirir ángulos de brazo en C en realidad virtual, basados en ángulos en el espacio 3D.
- Importe el archivo .stl del transportador desde el archivo complementario 1.
- Alinee (0,0) en el transportador, representado por la marca de medición más larga, con la nariz del paciente. Oriente el espacio en los brazos del transportador hacia los pies del paciente.
- Escale el transportador en consecuencia. En la mayoría de los casos, escale el transportador bastante pequeño para garantizar la facilidad de medición después de escalar en realidad virtual. En el caso de los aneurismas, trate de escalar el transportador de manera que se encuentre justo fuera del área del aneurisma.
- Alinee los orígenes de la anatomía con el origen del mundo.
- Haga clic con el botón derecho en la ventana gráfica principal y seleccione Ajustar > cursor al origen del mundo. Esto garantiza que el cursor 3D esté alineado con el origen global.
- Seleccione todos los modelos visibles con la tecla a .
- Haga clic con el botón derecho, haga clic en la ventana gráfica y seleccione Establecer origen > origen en cursor 3D. Esto alinea el origen 3D de todos los modelos en el mismo punto, lo que garantiza que se alineen y escalen correctamente cuando se importen a la realidad virtual.
- Agregue textura o color a los modelos según lo desee para una mejor distinción en realidad virtual.
- Este es un paso opcional. Seleccione los archivos .stl individuales y, a continuación, haga clic en la pestaña Propiedades del material en la parte derecha de la pantalla. En esta pestaña, el color base se puede ajustar al color deseado. Repita este paso para cada objeto que desee agregar color.
- Exporte el modelo finalizado como un solo. glb/.gltf. Asegúrese de que no esté seleccionada ninguna de las opciones Limitar a en la pestaña Incluir de la ventana de exportación.
NOTA: El. El formato de archivo glb/.gltf refleja el tipo de archivo necesario para su uso en el software de realidad virtual, así como para cargarlo en la biblioteca 3D de los NIH. Es posible que se necesiten otros tipos de exportación para diferentes softwares.
3. Formación de profesionales médicos en realidad virtual
NOTA: Las siguientes instrucciones están escritas para ser utilizadas con el software de aula digital Enduvo. Si bien es posible utilizar otro software de visualización 3D, la capacidad de mover modelos, colocar cámaras y registrar el posicionamiento del médico son algunas de las características que hacen que este software sea ideal para este procedimiento. Los diferentes cascos de realidad virtual, los controladores y las combinaciones de software pueden tener diferentes controles.
- Cree una nueva lección.
- Importe el archivo .gltf exportado en el paso 2.7 en el menú de creación de lecciones. El software puede producir un mensaje que indique: El tipo de archivo (GLB) que está intentando cargar no es totalmente compatible actualmente. Ignore este mensaje y haga clic en el botón Confirmar .
- Abra la lección en realidad virtual para finalizar.
- Usando el menú de transparencia al que se accede presionando el panel de control o el joystick de un controlador, oculte todos los modelos excepto la anatomía de destino. El aneurisma debe ser el único modelo visible.
- Coloque al cirujano o médico en realidad virtual y permítale algo de tiempo para que se familiarice con el espacio y las funciones 3D y la anatomía de la lección.
- Una vez que el cirujano se sienta cómodo con la anatomía, comience a grabar.
- Inicie la función de grabación usando el botón virtual en el espacio de realidad virtual o el botón de grabación en el monitor secundario.
- Deje que el cirujano gire la anatomía objetivo para encontrar los ángulos de visión preferidos para las vistas de fluoroscopia anteroposterior (AP) y lateral. Después de encontrar un ángulo preferido, pídale al cirujano que haga una breve pausa e indique que ha encontrado un ángulo preferido y si el ángulo de visión actual es AP o lateral.
- Una vez encontrados todos los ángulos preferidos, detenga la grabación con el botón VR o con un monitor externo.
4. Generación de la hoja de ruta de la fluoroscopia en RV
- Adquiera análogos de fluoroscopia utilizando la colocación registrada del cirujano.
- Coloque una imagen que imite el fondo de tono gris de una imagen de fluoroscopia detrás del modelo en el espacio virtual. Utilice el botón de selección del mando, a menudo el disparador situado en la parte trasera del mando, para manipular la imagen según sea necesario. Esto crea un color de fondo consistente que facilita la visualización de la anatomía y es más representativo de la fluoroscopia.
- Coloque la cámara en línea con la vista del cirujano en el momento declarado como ángulo de visión preferido, asegurándose de que la cámara apunte aproximadamente al centro de la anatomía objetivo. El cirujano aparecerá como un conjunto de gafas flotantes y dos controladores en realidad virtual.
- Capture una instantánea 2D con la cámara en la posición deseada. Repita el paso para cada ángulo preferido.
- Adquiera ángulos de brazo en C utilizando los movimientos y el transportador del cirujano.
- Pausa la lección grabada cuando el cirujano declare un ángulo de visión preferido.
- Haga clic en el panel táctil para abrir el menú rápido y seleccione la casilla de verificación Activado/Desactivado para mostrar el transportador conectado al modelo.
- Utilice el botón de agarre del controlador para seleccionar y manipular un puntero o una regla en línea con el punto de vista del cirujano, pasando también por el origen del transportador.
- Aléjese del modelo y vea los ángulos desde los puntos de vista ortográficos correspondientes a los movimientos del brazo en C.
- Para un caso de neurología con la nariz del paciente orientada a 0° en todos los ejes del arco en C, tome los ángulos AP de los planos sagital y axial. Toma los ángulos laterales de los planos coronal y axial. En ambos casos, el plano axial se corresponde con los ángulos derecho e izquierdo del brazo en C, mientras que los planos sagital y coronal se corresponden con los ángulos craneal y caudal.
- Repita los pasos anteriores para cada ángulo preferido.
Resultados
Siguiendo el protocolo presentado, se pueden generar hojas de ruta quirúrgicas virtuales tanto para la vista AP como para la fluoroscopia lateral. Estas hojas de ruta se crean colocando una cámara en el punto de vista del cirujano en realidad virtual para capturar su AP ideal y vistas laterales, al mismo tiempo que colocan un fondo de color detrás de la anatomía objetivo para replicar mejor una imagen de fluoroscopia. El transportador VR se utiliza en este punto para registrar el ángulo desde el cual el cirujano está viendo la anatomía objetivo, registrada como oblicua anterior derecha o izquierda (RAO/LAO - desplazamiento de la cámara hacia la derecha o izquierda del paciente, respectivamente) y craneal o caudal anterior (CRA/CAA - desplazamiento de la cámara hacia la cabeza o los pies del paciente, respectivamente)15. Al desarrollar este proceso, se utilizaron casos retrospectivos para proporcionar la capacidad de comparar los ángulos medidos en RV con los ángulos reales utilizados en las máquinas de arco en C en cirugía. Para este proceso se seleccionaron tres casos retrospectivos diferentes, cada caso tratado con un dispositivo quirúrgico diferente. La diversidad de estos tres casos muestra la versatilidad del protocolo presentado. Se le pidió al cirujano que encontrara los ángulos laterales y de PA preferidos sin hacer referencia a los ángulos del brazo en C utilizados durante el procedimiento, y las mediciones de RV se compararon con estas posiciones preexistentes del brazo en C.
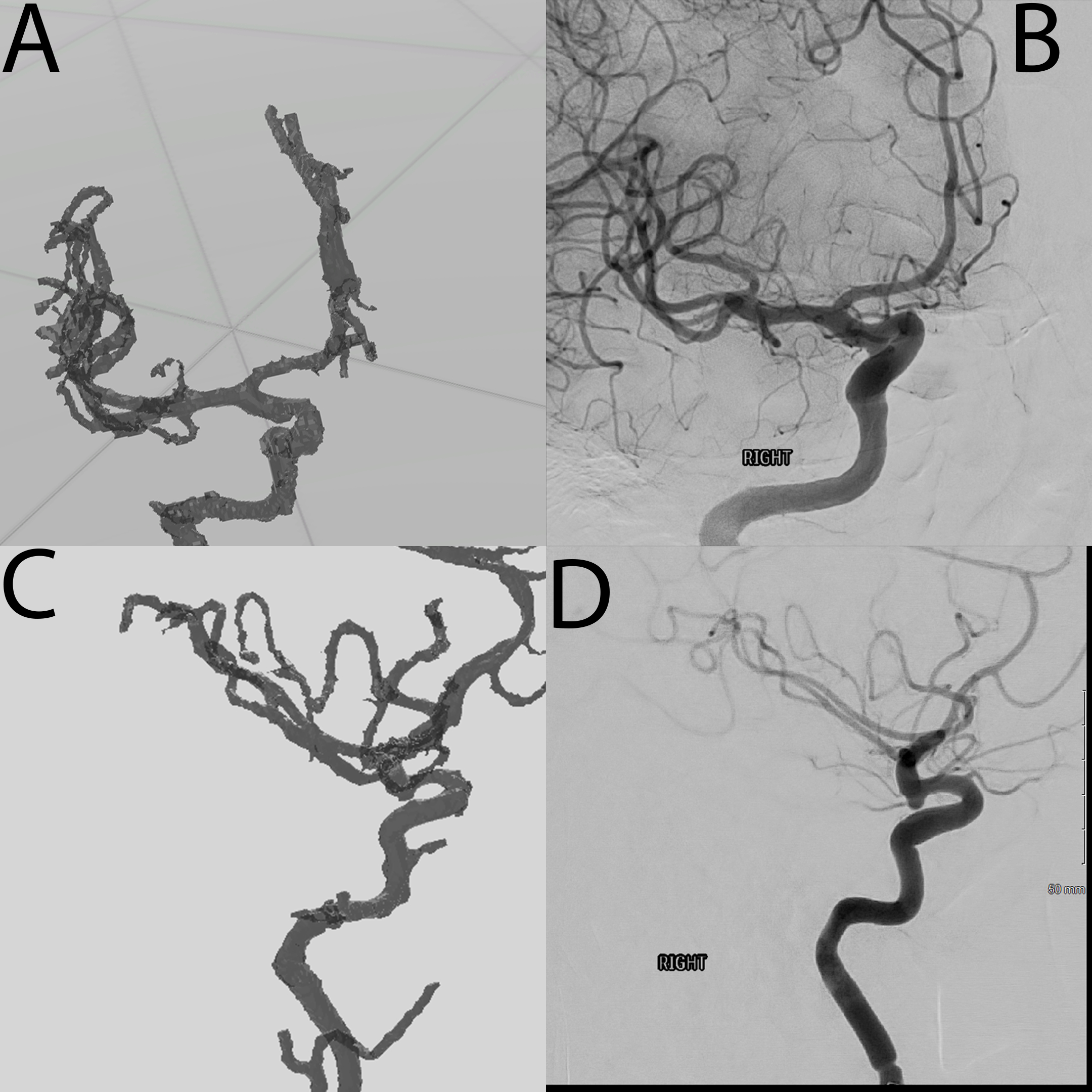
En el caso 1, el ángulo de visión AP preferido declarado se midió en VR como 16° CRA, 12° RAO. Las medidas reales utilizadas en cirugía para este caso fueron 11° CRA y 13° RAO. El error máximo entre estas mediciones es de 5° en el eje craneal/caudal. La Figura 2A muestra la vista AP declarada por el cirujano en realidad virtual, seguida de la Figura 2B, que muestra el ángulo real utilizado en la cirugía como se ve en la realidad virtual, y la Figura 2C, que muestra la imagen de fluoroscopia quirúrgica. La comparación de las tres imágenes muestra que las imágenes de realidad virtual son extraordinariamente similares a la imagen de fluoroscopia real en el mismo ángulo.
La vista lateral del mismo caso mostró uno de los muchos desafíos de este proceso debido a que el modelo 3D no se revisó adecuadamente. Debido a esta revisión defectuosa, había algunos vasos extraños segmentados que, según el cirujano, inhibían su visión del aneurisma en la RV y no están conectados a la anatomía objetivo y, como tales, no se reflejan con precisión en la RV. Estas discrepancias fueron el resultado de una falta de comunicación en la anatomía objetivo requerida durante la sesión de control de calidad con el médico. Estas discrepancias se pueden ver en la Figura 2D-F, que muestra el lateral declarado por el cirujano, la representación de VR basada en los ángulos de fluoroscopia quirúrgica y las imágenes de fluoroscopia reales de izquierda a derecha, respectivamente. Con la excepción de los vasos extraños, la vista AP declarada por el cirujano se asemeja mucho a la imagen de fluoroscopia real, a pesar de que las mediciones tomadas están desviadas 6° y 26° en los planos coronal y axial, respectivamente. La replicación de las mediciones reales en RV, como se muestra en la Figura 2E, también muestra una vista similar a la fluoroscopia real que se muestra a la derecha de la Figura 2F, con la principal discrepancia de los vasos adicionales anómalos. En este caso se empleó una colocación manual menos fiable de la herramienta transportadora, lo que puede explicar la ligera diferencia en la medición. Los casos futuros emplean un transportador que está unido a la anatomía para garantizar la máxima precisión de las mediciones de ángulos tomadas en realidad virtual.
En los casos 2 y 3, las vistas seleccionadas para ser óptimas en RV no eran representativas de las vistas utilizadas en el procedimiento real. Esto fue consecuencia de que la colocación inicial de los modelos en la realidad virtual fue un estudio ciego. Es importante tener en cuenta que el cirujano expresó que los procedimientos de fluoroscopia pueden tener múltiples ángulos de tratamiento aceptables, y no necesariamente hay un ángulo correcto. Con el fin de comparar, las imágenes se tomaron en RV desde los ángulos quirúrgicos informados. La Figura 3 muestra la vista VR AP en la Figura 3A y la vista quirúrgica AP en la Figura 3B. En la Figura 3, se puede hacer una comparación similar entre las vistas laterales de la Figura 3C,D para el caso 2. Para el caso 3, la Figura 4 muestra la comparación de AP Figura 4A,B, así como la comparación lateral Figura 4C,D. Las similitudes entre las imágenes de RV y fluoroscopia de estos casos demuestran aún más la capacidad de la RV para ser utilizada en la planificación quirúrgica.
Un beneficio importante de este protocolo es la mejora de la planificación quirúrgica al aprovechar los modelos 3D en un entorno de realidad virtual. Un estudio previo sobre la efectividad de la RV en la planificación quirúrgica de casos oncológicos complejos mostró que aproximadamente el 50% de los casos que emplearon el uso de RV alteraron el abordaje quirúrgico del plan realizado utilizando solo conjuntos de datos 2D9. La RV también ha demostrado ser útil en el proceso de planificación quirúrgica para la resección de tumores hepáticos16,17, así como en procedimientos que involucran patología de cabeza y cuello18. El cirujano que participó en la creación de este protocolo afirmó que: en la realidad virtual puedo ver [la anatomía] mucho mejor, lo que demuestra el beneficio de la realidad virtual para las aplicaciones neuroquirúrgicas endovasculares.

Figura 1: Captura de pantalla desde el software de segmentación. La captura de pantalla muestra la anatomía resaltada basada en máscaras. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 2: Caso 1. (A) Vista anteroposterior del Caso 1 tal como lo coloca el cirujano que opera en VR. (B) Vista anteroposterior del caso 1 en VR basada en mediciones de ángulos tomadas durante la cirugía. (C) Vista de fluoroscopia anteroposterior capturada durante la cirugía. (D) Vista lateral del Caso 1 tal como lo colocó el cirujano que lo operó en VR. (E) Vista lateral del Caso 1 en VR basada en mediciones de ángulos tomadas durante la cirugía. (F) Vista de fluoroscopia lateral capturada durante la cirugía. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 3: Caso 2. (A) Vista anteroposterior del Caso 2 en VR basada en mediciones de ángulos tomadas durante la cirugía. (B) Vista de fluoroscopia anteroposterior del Caso 2 capturada durante la cirugía. (C) Vista lateral del Caso 2 en RV basada en mediciones de ángulos tomadas durante la cirugía. (D) Vista de fluoroscopia lateral del Caso 2 capturado durante la cirugía. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}

Figura 4: Caso 3. (A) Vista anteroposterior del Caso 3 en RV basada en mediciones de ángulos tomadas durante la cirugía. (B) Vista de fluoroscopia anteroposterior del Caso 3 capturada durante la cirugía. (C) Vista lateral del Caso 3 en VR basada en mediciones de ángulos tomadas durante la cirugía. (D) Vista de fluoroscopia lateral del Caso 3 capturado durante la cirugía. Haga clic aquí para ver una versión más grande de esta figura.
{kind=link}
Expediente Complementario 1: Se desarrolló un modelo 3D de transportadores y se utilizó para el protocolo en formato de archivo STL. Haga clic aquí para descargar este archivo.
Discusión
El modelado 3D se introdujo en los flujos de trabajo médicos con la llegada de las tecnologías de impresión 3D 2,3,4,6,7,9,11, pero la realidad virtual ofrece nuevas aplicaciones de la tecnología 3D más allá de un objeto 3D físico. Los esfuerzos por replicar la anatomía y los escenarios en un mundo virtual permiten la práctica médica personalizada en pacientes individuales 1,2,3,4,9,11,13,16. Este trabajo demuestra la capacidad expansiva de crear nuevas simulaciones prequirúrgicas en un mundo digital con el mínimo esfuerzo.
A lo largo del protocolo presentado, hay varios pasos que son críticos para el éxito de un caso. El factor más importante para producir resultados adecuados con una resolución adecuada es adquirir las imágenes médicas correctas. El proceso presentado no requiere exploraciones adicionales en el paciente, utilizando la tomografía computarizada estándar que se programa para cada caso de aneurisma intracraneal. La mayoría de los escáneres almacenarán los escaneos durante un corto período de tiempo, según el modelo de escáner y el protocolo del sistema de salud, lo que permite al técnico de imágenes cargar las rebanadas delgadas adquiridas de los escaneos. Por lo general, las rebanadas de menos de 1 mm de grosor a menudo no se almacenan más de unos pocos días debido al tamaño de almacenamiento. Estas finas rebanadas permiten un mayor detalle y la inclusión de anatomías más pequeñas, como los vasos sanguíneos. Una vez que se ha llevado a cabo la segmentación, se debe completar el control de calidad del médico para garantizar que los modelos 3D generados representen la anatomía del paciente con la mayor precisión posible en los pasos futuros. El control de calidad de todos los modelos debe formar parte del proceso de segmentación, minimizando el potencial de propagación del error en el resto del protocolo. El control de calidad incluye los bordes de los vasos sanguíneos y la segmentación del aneurisma por separado de los vasos circundantes, de forma similar a como se presentaría con el contraste. El control de calidad con un médico es de suma importancia, ya que el médico tiene toda la responsabilidad de la precisión de los modelos, especialmente si los modelos se van a utilizar en la toma de decisiones posteriores sobre el tratamiento del paciente. En algunas circunstancias, puede ser factible o práctico que el médico complete el paso de segmentación por sí mismo.
El siguiente paso importante en el protocolo es mantener la alineación del modelo espacial mientras se integra la herramienta de medición del transportador. Blender ha demostrado ser una herramienta extremadamente útil para este paso, ya que permite la combinación de múltiples tipos de archivos STL en un archivo combinado con múltiples capas, cada una de las cuales está alineada espacialmente y se puede colorear o texturizar para mayor claridad. Además, durante este paso, se agrega el transportador STL para que los datos de ángulo se puedan recopilar en realidad virtual. Este modelo de transportador se desarrolló específicamente utilizando una herramienta de diseño asistido por ordenador (CAD), SolidWorks. Aprovechando las herramientas de dimensionamiento de alta precisión dentro del software, se creó un arco con marcas de tic que denotan cada 5° en los tres ejes. El transportador también tiene un punto de mira que denota el verdadero centro de ese modelo y permite la alineación con el centro de la anatomía del paciente. También hay una barra grande dentro del modelo que significa (0,0) y debe alinearse con la nariz del paciente. Además, es importante tener en cuenta que esto se hizo manualmente y podría haber aumentado el porcentaje de error. La alineación es de suma importancia para garantizar la precisión de todas las posibles mediciones de ángulos. Una vez alineado correctamente, el modelo está listo para la realidad virtual, donde el registro de la ubicación del modelo por parte del médico permite la determinación futura de los ángulos en los que se ha colocado el modelo. Durante la grabación, todo lo que se encuentra dentro del espacio virtual se registra en referencia a los demás, lo más importante es el punto de vista del médico (POV) y los movimientos y rotaciones de los modelos. Aprovechando al máximo esta grabación y la función de pausa, se coloca un borde recto desde el punto de vista del médico a través de la mira del modelo del transportador, y las mediciones se pueden observar de una manera notablemente similar al uso de un transportador real.
Esta metodología tiene algunas limitaciones. Una de estas limitaciones es que no hay necesariamente una única orientación correcta para el aneurisma cuando se observa en fluoroscopia. Esto llevó a múltiples intentos de validación simplemente debido a los diferentes ángulos de visión. Esta limitación puede verse como un posible beneficio desde la perspectiva de que con la familiaridad adicional que proviene de la manipulación del modelo 3D, es posible que el médico encuentre una vista óptima en comparación con el método actual de determinación de ángulos dentro del quirófano. Otra limitación potencial de este protocolo es que es posible determinar un ángulo de visión en realidad virtual al que en realidad no sería posible llegar para los arcos en C. Esta limitación sería tenida en cuenta y conocida por el médico en RV para que se pudieran hacer especificaciones si esto se convirtiera en parte de la planificación quirúrgica. Otra limitación, que demuestra la importancia de la etapa de control de calidad, es que en algunos casos, los vasos que son distales del aneurisma, en realidad, no se ven tan prominentemente en los procedimientos de fluoroscopia como lo serían si se incluyeran en el modelo en VR. Esto puede obligar al médico a tener en cuenta un vaso que no necesariamente estaría en el camino durante el procedimiento en la realidad virtual, lo que lleva a que se genere un ángulo de visión subóptimo en la realidad virtual. En la segmentación, es posible segmentar la mayoría de los vasos sanguíneos y el área de interés; El intervencionista podría optar por alternar entre modelos de embarcaciones para asegurarse de que no haya embarcaciones adicionales en su ángulo de visión, el uso de contratos también minimiza este riesgo.
El desarrollo de un transportador de modelos 3D y un protocolo que pueda proporcionar mediciones de ángulos en múltiples ejes dentro de la realidad virtual tiene una importancia inmensa y promete una amplia gama de aplicaciones potenciales. Los beneficios podrían resultar multifacéticos, mejorando potencialmente varias industrias, desde la arquitectura y la ingeniería hasta la fabricación y las aplicaciones militares. Sin embargo, como se muestra en este protocolo, su verdadero potencial brilla en el ámbito de la atención médica, directamente dentro de las partes de planificación quirúrgica de la atención al paciente. Los cirujanos pueden utilizar esta herramienta para evaluar y planificar meticulosamente todo tipo de procedimientos al poder visualizar y medir ángulos directamente en realidad virtual. Esta técnica es similar al trabajo realizado para el cateterismo cardíaco19. Un beneficio directo de conocer ángulos particulares antes del procedimiento es la reducción significativa en la necesidad de un giro completo de 360 grados durante la fluoroscopia, una técnica de imagen comúnmente empleada durante la reparación de un aneurisma. Al determinar los ángulos necesarios para imitar la hoja de ruta quirúrgica virtual, los cirujanos pueden posicionar el equipo con mayor precisión, minimizando así la exposición del paciente a la radiación. Esto no solo contribuye a la seguridad del paciente al minimizar los riesgos asociados con la exposición a la radiación, sino que también agiliza el procedimiento quirúrgico. Con la reducción del tiempo dedicado a los ajustes de fluoroscopia, los equipos quirúrgicos pueden operar de manera más eficiente, lo que en última instancia conduce a tiempos de procedimiento más cortos.
Los avances recientes en el modelado 3D y la tecnología de realidad virtual permiten al personal médico evitar el pensamiento improvisado durante las cirugías al obtener una comprensión profunda de la anatomía interna de un paciente antes de la operación en todos los casos, excepto en los más urgentes 1,2,3,4,6,9,11,13,16 . Si el tiempo lo permite, el personal médico debe aprovechar el uso de la segmentación de imágenes médicas y los diagnósticos de realidad virtual para comprender mejor el caso antes de colocar al paciente en la mesa de operaciones. En última instancia, esto conducirá a una mejor comprensión de cada paciente único, así como a una reducción del tiempo quirúrgico y del tiempo bajo anestesia.
Divulgaciones
Matthew Bramlet es cofundador de Enduvo, Inc. El resto de los autores declaran que no tienen intereses financieros relevantes o materiales que se relacionen con la investigación descrita en este trabajo.
Agradecimientos
Extendemos un agradecimiento especial al comité de revisión por sus perspicaces comentarios, y al editorial por sus invaluables comentarios, experiencia, orientación y apoyo durante todo el proceso de redacción de este artículo. Apreciamos enormemente el ambiente de colaboración fomentado por los Socios de la Misión en OSF HealthCare System, que mejoró la calidad de este trabajo. Gracias a OSF HealthCare System por proporcionar recursos y apoyo y al Laboratorio de Imágenes y Modelado Avanzado en el Centro de Simulación y Educación de Jump por su ayuda.
Materiales
| Name | Company | Catalog Number | Comments |
| 3D Slicer | N/A | Open source segmentation software | |
| Blender | N/A | Open-source CAD software that can import and edit organic models created through segmentation | |
| Enduvo | Enduvo | N/A | A proprietary VR viewer built for education, and our VR viewer of choice |
| McKesson PACS Change Healthcare Radiology Solution | McKesson | N/A | Any Picture Archiving and Communication System should be suffiecient, McKessen is simply our PACS software solution of choice. |
| Mimics | Materialise | N/A | Segmentation software |
| Quest | Oculus | N/A | Virtual Reality Headset |
| Steam VR | Steam | N/A | Computer to headset connection software. |
| VR capable computer | See Steam VR for minimal requirements. | ||
| VR-STL-Viewer | GitHub | N/A | A open-source VR viewer capable of importing and viewing .stl and can be used, however we cannot guarantee all functionalities mentioned in this paper will be available |
Referencias
- Xia, J., et al. Three-dimensional virtual reality surgical planning and simulation workbench for orthognathic surgery. Int J Adult Orthodon Orthognath Surg. 15 (4), 265-282 (2000).
- Boedecker, C., et al. Using virtual 3D-models in surgical planning: workflow of an immersive virtual reality application in liver surgery. Langenbecks Arch Surg. 406, 911-915 (2021).
- Reitinger, B., Bornik, A., Beichel, R., Schmalstieg, D. Liver surgery planning using virtual reality. IEEE Comput Graph Appl. 26 (6), 36-47 (2006).
- Robiony, M., et al. Virtual reality surgical planning for maxillofacial distraction osteogenesis: The role of Reverse Engineering Rapid Prototyping and cooperative work. J Oral Maxillofacial Surg. 65 (6), 1198-1208 (2007).
- Xia, J., et al. Three-dimensional virtual-reality surgical planning and soft-tissue prediction for orthognathic surgery. IEEE Trans Info Tech Biomed. 5 (2), 97-107 (2001).
- Kim, Y., Kim, H., Kim, Y. O. Virtual reality and augmented reality in plastic surgery: A Review. Arch Plastic Surg. 44 (3), 179-187 (2017).
- Ayoub, A., Pulijala, Y. The application of virtual reality and augmented reality in oral & maxillofacial surgery. BMC Oral Health. 19 (1), 238(2019).
- Ulbrich, M., et al. Advantages of a training course for surgical planning in virtual reality for oral and maxillofacial surgery: Crossover study. JMIR Serious Games. 11, e40541(2023).
- Lyuksemburg, V., et al. Virtual reality for preoperative planning in complex surgical oncology: A single-center experience. J Surg Res. 291, 546-556 (2023).
- Macario, A. What does one minute of operating room time cost. J Clin Anesth. 22 (4), 233-236 (2010).
- Bramlet, M., et al. Virtual reality visualization of patient specific heart model. J Cardiovasc Mag Res. 18 (1), 13(2016).
- Guillot, A., et al. Relationship between spatial abilities, mental rotation and functional anatomy learning. Adv Health Sci Edu. 12 (4), 491-507 (2006).
- Juhnke, B., et al. Use of virtual reality for pre-surgical planning in separation of conjoined twins: A case report. Proc Inst Mech Eng H. 233 (12), 1327-1332 (2019).
- Mattus, M. S., et al. Creation of patient-specific silicone cardiac models with applications in pre-surgical plans and hands-on training. J Vis Exp. (180), e62805(2022).
- Kern, M. Angiographic projections made simple: An easy guide to understanding oblique views. Cath Lab Digest. 19 (8), (2011).
- Reinschluessel, A. V., et al. Virtual reality for surgical planning - evaluation based on two liver tumor resections. Front Surg. 9, 821060(2022).
- Tang, R., et al. Augmented reality technology for preoperative planning and intraoperative navigation during Hepatobiliary Surgery: A review of current methods. Hepatobiliary Pancreat Dis Int. 17 (2), 101-112 (2018).
- Manzie, T., et al. Virtual reality digital surgical planning for jaw reconstruction: A usability study. ANZ J Surg. 93 (5), 1341-1347 (2023).
- Corren, Y. B., et al. CT-based Simulation of Projection Angiography Using the SlicerHeart Virtual Cath Lab [Poster Presentation]. World Congress of Pediatric Cardiology and Cardiac Surgery. , (2023).
Reimpresiones y Permisos
Solicitar permiso para reutilizar el texto o las figuras de este JoVE artículos
Solicitar permisoExplorar más artículos
This article has been published
Video Coming Soon
ACERCA DE JoVE
Copyright © 2025 MyJoVE Corporation. Todos los derechos reservados