
Method Article
Approches pionnières spécifiques au patient pour la chirurgie de précision utilisant l’imagerie et la réalité virtuelle
Dans cet article
Résumé
Les progrès du traitement endovasculaire ont remplacé les procédures chirurgicales ouvertes complexes par des options peu invasives, comme le remplacement valvulaire et la réparation d’anévrisme. Cet article propose d’utiliser la modélisation tridimensionnelle (3D) et la réalité virtuelle pour faciliter le positionnement de l’arceau, les mesures d’angle et la génération de feuilles de route pour la planification des procédures de laboratoire de cathétérisme neuro-interventionnel, minimisant ainsi la durée de la procédure.
Résumé
Le traitement endovasculaire des anomalies vasculaires complexes déplace le risque des procédures chirurgicales ouvertes au profit de solutions procédurales endovasculaires mini-invasives. Les procédures chirurgicales ouvertes complexes étaient autrefois la seule option pour le traitement d’une myriade de conditions telles que le remplacement des valves pulmonaires et aortiques ainsi que la réparation des anévrismes cérébraux. Cependant, en raison des progrès réalisés dans les dispositifs administrés par cathéter et de l’expertise des opérateurs, ces procédures (ainsi que beaucoup d’autres) peuvent désormais être effectuées par des procédures peu invasives administrées par une veine ou une artère centrale ou périphérique. La décision de passer d’une procédure ouverte à une approche endovasculaire est basée sur l’imagerie multimodale, comprenant souvent des ensembles de données d’imagerie numérique 3D et de communications en médecine (DICOM). En utilisant ces images 3D, notre laboratoire génère des modèles 3D de l’anatomie pathologique, permettant ainsi l’analyse pré-procédurale nécessaire pour planifier à l’avance les composants critiques de la procédure de laboratoire de cathétérisme, à savoir le positionnement de l’arceau, la mesure 3D et la génération de feuilles de route idéalisées. Cet article décrit comment prendre des modèles 3D segmentés d’une pathologie spécifique au patient et prédire les positions généralisées de l’arceau, comment mesurer les mesures bidimensionnelles (2D) critiques des structures 3D pertinentes pour les projections de fluoroscopie 2D et comment générer des analogues de feuille de route de fluoroscopie 2D qui peuvent aider au bon positionnement de l’arceau pendant les procédures de laboratoire de cathétérisme.
Introduction
Le traitement des anévrismes intracrâniens est un aspect difficile de la chirurgie neuro-interventionnelle, nécessitant une planification chirurgicale précise pour garantir des résultats optimaux pour les patients. Ces dernières années, la technologie de réalité virtuelle (RV) est devenue un outil prometteur pour améliorer la planification chirurgicale en permettant aux chirurgiens d’accéder à des modèles anatomiques immersifs et spécifiques au patient dans un environnement virtuel3D 1,2,3,4,5,6,7,8 . Cet article présente un protocole complet pour l’utilisation de l’imagerie médicale et de la segmentation, de la modélisation 3D, de la planification chirurgicale en RV et de la génération de feuilles de route virtuelles idéalisées pour aider à la planification chirurgicale pour le traitement des anévrismes.
La combinaison de ces étapes aboutit à une approche de planification chirurgicale virtuelle, permettant aux médecins de s’immerger dans un environnement virtuel et d’acquérir une compréhension complète de l’anatomie unique d’un patient avant une intervention chirurgicale. Cette approche immersive permet aux chirurgiens d’explorer le positionnement optimal et de simuler divers scénarios procéduraux. L’enregistrement de ces scénarios peut fournir un aperçu de l’emplacement des équipements chirurgicaux réels, tels que le positionnement de l’arceau.
En plus des angles de positionnement, il est également possible de mesurer l’anatomie dans un environnement virtuel à l’aide d’outils de mesure conçus pour l’espace 3D. Ces mesures peuvent donner un aperçu de la taille et de la forme correctes du dispositif à utiliser dans un cas d’anévrisme intracrânien9.
Ce protocole présente un processus complet qui combine de manière transparente l’imagerie médicale, la segmentation d’images, la préparation de modèles VR et la génération de feuilles de route chirurgicales virtuelles pour améliorer le processus de planification chirurgicale. Utilisant une combinaison de technologies de pointe, ce protocole permet de gagner un temps précieux en salle d’opération10, ainsi que d’accroître la confiance des chirurgiens et leur compréhension des cas chirurgicaux complexes 11,12,13.
Protocole
Les DICOM humains anonymisés ou les DICOM pour les soins aux patients sont utilisés conformément aux directives institutionnelles pour les soins aux patients, à la loi sur la portabilité et la responsabilité de l’assurance maladie de 1996 (HIPAA) et à la collaboration avec l’Institutional Review Board (IRB) le cas échéant.
1.Anatomie spécifique à la population
- Acquisition de scanners médicaux
- Commencez le processus de segmentation avec un médecin ou un chirurgien qui commande des examens médicaux. Ces examens font partie du protocole standard de soins aux patients et n’introduisent pas de procédures supplémentaires.
- Si le médecin sait qu’il demandera une segmentation, assurez-vous qu’il demande que des ensembles de données finement découpés soient exportés à partir de l’IRM ou du tomodensitomètre. Dans la plupart des cas, ces fines tranches ont moins de 1 mm d’épaisseur ; cependant, cette résolution peut varier d’un scanner à l’autre. Faites des tomodensitogrammes avec contraste afin d’assurer une bonne segmentation du système vasculaire et des flaques de sang.
- Pour l’acquisition de données, acquérir une séquence IRM 3D avec les paramètres suggérés suivants : exécution axiale, assurer l’épaisseur de la tranche et l’espace entre les tranches de 0,625 mm ou moins, espacement nul. Acquérez la série CT 3D avec les paramètres suggérés suivants : scanner de coupe en mode hélicoïdal, épaisseur de coupe et espace entre les tranches de 0,625 mm, par exemple, Neuro : Kvp de 120, plage Smart mA de 100-740, vitesse de rotation à 0,5 ms, ou Cardiaque : Kvp de 70, plage Smart mA de 201-227 (mode Smart MA 226), vitesse de rotation à 0,28 ms14. Suivez les paramètres hélicoïdaux de l’établissement pour chaque partie du corps.
REMARQUE : La séquence 3D doit être acquise de manière à ce que dans la reconstruction, il y ait une résolution quasi isotrope dans les plans axial, coronal et sagittal. Dans la plupart des cas, les tranches les plus fines doivent être acquises. La séquence 3D est exécutée en plus du protocole standard d’imagerie de l’institution. Cependant, il est exécuté en même temps, de sorte qu’il y a un minimum de travail supplémentaire, d’exposition aux radiations et de dépenses pour l’équipe clinique et le patient.
- Pour l’acquisition de données, acquérir une séquence IRM 3D avec les paramètres suggérés suivants : exécution axiale, assurer l’épaisseur de la tranche et l’espace entre les tranches de 0,625 mm ou moins, espacement nul. Acquérez la série CT 3D avec les paramètres suggérés suivants : scanner de coupe en mode hélicoïdal, épaisseur de coupe et espace entre les tranches de 0,625 mm, par exemple, Neuro : Kvp de 120, plage Smart mA de 100-740, vitesse de rotation à 0,5 ms, ou Cardiaque : Kvp de 70, plage Smart mA de 201-227 (mode Smart MA 226), vitesse de rotation à 0,28 ms14. Suivez les paramètres hélicoïdaux de l’établissement pour chaque partie du corps.
- Demandez au médecin de demander la segmentation du modèle, en précisant quelle anatomie sera au centre du processus de segmentation (un médecin ou un chirurgien effectue généralement cette étape).
- Téléchargez les données de numérisation et enregistrez-les localement.
- Si plusieurs scans ont été effectués, assurez-vous que les jeux de données DICOM du scan sont comparés pour déterminer quel scan a le réglage de tranche le plus fin et le meilleur contraste, car cela fournira les modèles 3D de la plus haute résolution lors de la segmentation.
- Une fois le meilleur ensemble d’images déterminé, téléchargez-le à partir de la base de données d’images pour la segmentation, anonymisez-le ou laissez les données telles quelles avec des informations de santé protégées (PHI). Ce protocole fonctionnera avec un DICOM anonymisé.
- Importez le jeu de données DICOM dans le logiciel de segmentation.
REMARQUE : Le jeu d’instructions suivant utilise des termes spécifiques au logiciel de segmentation Materialise Mimics. Bien que la suite Materialise soit un logiciel par abonnement, il existe des alternatives open source telles que 3DSlicer. Les noms et la terminologie des outils peuvent varier d’un outil de segmentation à l’autre. - Créez un masque approximatif de l’anatomie cible, comme l’os, le pool sanguin, l’anévrisme, etc.
- Sous l’onglet SEGMENT , sélectionnez l’outil Nouveau masque .
- Définissez les limites des seuils supérieur et inférieur en cliquant et en faisant glisser les deux pour capturer autant que possible l’anatomie cible pertinente tout en limitant la capture des tissus environnants. Cliquez et faites glisser les limites dans l’outil de seuil ou saisissez l’unité Hounsfield (HU) souhaitée.
- Lors de la définition des seuils, recadrez à une zone spécifique de l’examen pour éviter une sélection excessive des tissus environnants. Les limites de seuil supérieur et inférieur varient considérablement en fonction du type d’examen, du type de séquence, de la quantité de contraste et du patient.
- Cliquez sur OK pour finaliser le masque brut.
- Utilisez d’autres outils dans l’onglet SEGMENT pour supprimer les parties inutiles du masque ou ajouter des tissus manquants si nécessaire.
- Utilisez l’outil Croissance de la région pour séparer tous les voxels du masque directement connectés à un voxel sélectionné par l’utilisateur ; utilisez Modifier le masque pour ajouter ou supprimer des voxels dans le masque via les fenêtres 2D et 3D ; utilisez l’option Édition de tranches multiples pour ajouter ou supprimer des voxels par interpolation entre des tranches plus éloignées ; et utilisez Remplir les trous ou Remplissage intelligent pour remplir les trous d’une taille définie par l’utilisateur dans le masque.
- Continuez à affiner le masque en utilisant les outils de l’onglet jusqu’à ce que l’interpolation 2D-3D soit aussi précise que possible.
- Répétez les étapes 1.5 et 1.6 pour toutes les anatomies cibles.
- Consultez un médecin concernant la segmentation terminée pour assurer l’exactitude.
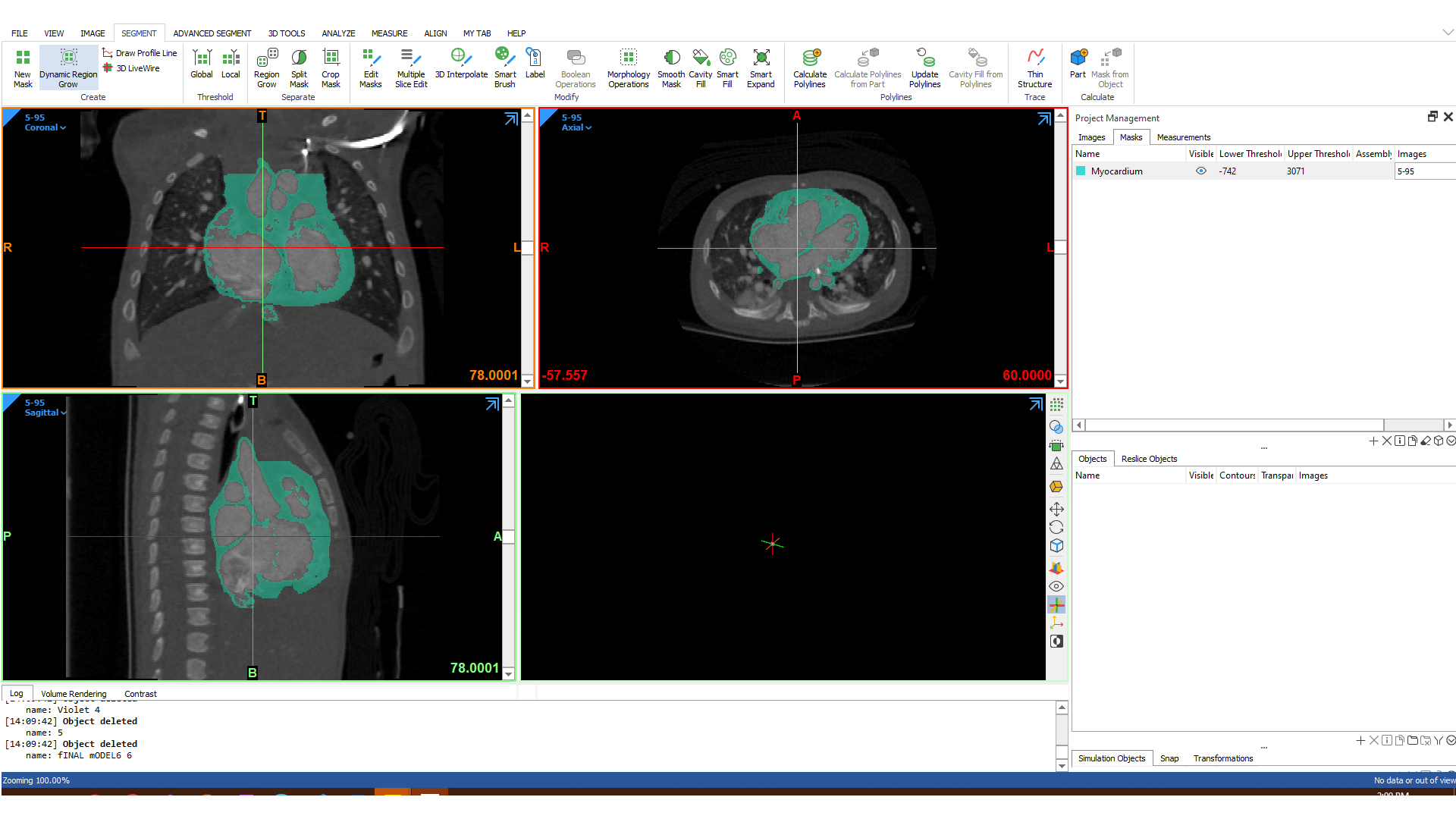
- Montrez les masques remplis à un médecin pour vous assurer que l’anatomie importante n’a pas été omise et que l’anatomie excessive n’a pas été incluse. Dans la plupart des cas, consultez le médecin qui demande la segmentation pour le contrôle de la qualité. Le médecin s’assure que la partie du DICOM mise en évidence par le masque sur chaque tranche est aussi précise que possible (voir Figure 1).
- Segmentation d’exportation pour un traitement ultérieur.
- Convertissez les masques finalisés en pièces à l’aide de l’outil Calculer la pièce situé dans le menu Gestion de projet sur le côté droit.
- Exportez les pièces calculées vers des fichiers 3D en cliquant avec le bouton droit de la souris sur La pièce et en sélectionnant Exporter STL.
2. Préparez le modèle pour la réalité virtuelle
- Créez un nouveau projet Blender et supprimez les éléments de scène par défaut. Appuyez sur la touche a pour mettre en surbrillance tous les éléments visibles, puis sur x suivi de Entrée pour les supprimer de la scène.
REMARQUE : Blender est un logiciel de modélisation gratuit et open-source. Bien que d’autres logiciels de modélisation puissent être en mesure d’accomplir les mêmes tâches, la terminologie utilisée dans cette étape sera spécifique à Blender. - Importez les fichiers d’anatomie via Fichier > Importer > Stl (.stl).
- Alignez l’anatomie du patient sur l’origine du monde.
- Sélectionnez toute l’anatomie du patient afin de maintenir le positionnement relatif. Pour ce faire, appuyez sur la touche a une fois tous les fichiers importés.
- Utilisez les outils Déplacer et Pivoter pour aligner l’anatomie sur l’origine du monde. Assurez-vous que le nez du patient est aligné avec un axe, l’axe perpendiculaire entrant en contact avec la zone de l’oreille et le haut du crâne, respectivement. Utilisez des vues orthographiques, qui peuvent être activées avec le widget dans le coin supérieur droit de l’interface de blender.
- Importez le rapporteur VR et alignez-le sur l’anatomie du patient. Ce rapporteur a été spécialement conçu par l’équipe d’ingénieurs d’OSF pour aider à acquérir des angles d’arceau en VR, basés sur des angles dans l’espace 3D.
- Importez le fichier .stl du rapporteur à partir du fichier supplémentaire 1.
- Alignez (0,0) sur le rapporteur, représenté par le repère de mesure le plus long, avec le nez du patient. Orientez l’espace dans les bras du rapporteur vers les pieds du patient.
- Mettez le rapporteur à l’échelle en conséquence. Dans la plupart des cas, mettez le rapporteur à l’échelle assez petit afin d’assurer une facilité de mesure après la mise à l’échelle en VR. Dans le cas des anévrismes, essayez de mettre le rapporteur à l’échelle de manière à ce qu’il se trouve juste à l’extérieur de la zone de l’anévrisme.
- Alignez les origines de l’anatomie sur l’origine du monde.
- Cliquez avec le bouton droit de la souris dans la fenêtre principale et sélectionnez Aligner > curseur sur l’origine du monde. Cela garantit que le curseur 3D est aligné sur l’origine globale.
- Sélectionnez tous les modèles visibles à l’aide de la touche a .
- Cliquez avec le bouton droit de la souris, cliquez dans la fenêtre et sélectionnez Définir l’origine > l’origine sur le curseur 3D. Cela aligne l’origine 3D de tous les modèles sur le même point, garantissant qu’ils s’aligneront et se mettront à l’échelle correctement lors de l’importation en VR.
- Ajoutez de la texture ou de la couleur aux modèles comme vous le souhaitez pour une meilleure distinction en VR.
- Il s’agit d’une étape facultative. Sélectionnez les fichiers .stl individuels, puis cliquez sur l’onglet Propriétés du matériau sur le côté droit de l’écran. Sous cet onglet, la couleur de base peut être ajustée à la couleur souhaitée. Répétez cette étape pour chaque objet afin d’ajouter de la couleur.
- Exportez le modèle finalisé en tant qu’unique. glb/.gltf. Assurez-vous qu’aucune des options Limiter à sous l’onglet Inclure de la fenêtre d’exportation n’est sélectionnée.
REMARQUE : Le. Le format de fichier glb/.gltf reflète le type de fichier requis pour une utilisation dans le logiciel VR, ainsi que pour le téléchargement dans la bibliothèque 3D du NIH. D’autres types d’exportation peuvent être nécessaires pour différents logiciels.
3. Former les professionnels de la santé à la réalité virtuelle
REMARQUE : Les instructions suivantes sont écrites pour être utilisées avec le logiciel de classe numérique Enduvo. Bien qu’il soit possible d’utiliser d’autres logiciels de visualisation 3D, la possibilité de déplacer des modèles, de placer des caméras et d’enregistrer le positionnement du médecin sont quelques-unes des caractéristiques qui rendent ce logiciel idéal pour cette procédure. Différentes combinaisons de casques, de contrôleurs et de logiciels VR peuvent avoir des commandes différentes.
- Créez une nouvelle leçon.
- Importez le fichier .gltf exporté à l’étape 2.7 dans le menu de création de leçon. Le logiciel peut produire un message indiquant : Le type de fichier (GLB) que vous essayez de télécharger n’est actuellement pas entièrement pris en charge. Ignorez ce message et cliquez sur le bouton Confirmer .
- Ouvrez la leçon en VR pour la finaliser.
- À l’aide du menu de transparence accessible en appuyant sur le pavé numérique ou le joystick d’une manette, masquez tous les modèles à l’exception de l’anatomie cible. L’anévrisme doit être le seul modèle visible.
- Placez le chirurgien ou le médecin en RV et laissez-lui un peu de temps pour se familiariser avec l’espace et les fonctions 3D et l’anatomie de la leçon.
- Une fois que le chirurgien est à l’aise avec l’anatomie, commencez à enregistrer.
- Démarrez la fonction d’enregistrement à l’aide du bouton virtuel de l’espace VR ou du bouton d’enregistrement sur le moniteur secondaire.
- Laissez le chirurgien faire pivoter l’anatomie cible pour trouver les angles de vision préférés pour les vues de fluoroscopie antéropostérieure (AP) et latérale. Après avoir trouvé un angle préféré, demandez au chirurgien de faire une brève pause et d’indiquer qu’il a trouvé un angle préféré et si l’angle de vision actuel est AP ou latéral.
- Une fois que tous les angles préférés sont trouvés, arrêtez l’enregistrement avec le bouton VR ou un moniteur externe.
4. Génération d’une feuille de route pour la fluoroscopie en VR
- Acquérir des analogues de fluoroscopie à l’aide du placement enregistré du chirurgien.
- Placez une image imitant le fond gris d’une image de fluoroscopie derrière le modèle dans l’espace virtuel. Utilisez le bouton de sélection de la manette, souvent la gâchette à l’arrière de la manette, pour manipuler l’image selon vos besoins. Cela crée une couleur d’arrière-plan cohérente qui facilite la visualisation de l’anatomie et est plus représentative de la fluoroscopie.
- Placez la caméra dans l’alignement de la vue du chirurgien à l’heure déclarée comme angle de vue préféré, en vous assurant que la caméra est pointée approximativement au centre de l’anatomie cible. Le chirurgien apparaîtra sous la forme d’un ensemble de lunettes flottantes et de deux manettes en VR.
- Capturez un instantané 2D avec l’appareil photo dans la position souhaitée. Répétez l’étape pour chaque angle préféré.
- Acquérir les angles de l’arceau en utilisant les mouvements et le rapporteur du chirurgien.
- Mettez en pause la leçon enregistrée lorsque le chirurgien déclare un angle de vision préféré.
- Cliquez sur le trackpad pour ouvrir le menu rapide et cochez la case Activé/Désactivé pour afficher le rapporteur attaché au modèle.
- Utilisez le bouton de saisie de la manette pour sélectionner et manipuler un pointeur ou une règle en fonction du point de vue du chirurgien, en passant également par l’origine du rapporteur.
- Prenez du recul par rapport au modèle et visualisez les angles des points de vue orthographiques correspondant aux mouvements de l’arceau.
- Pour un cas de neurologie avec le nez du patient orienté à 0° sur tous les axes de l’arceau, prenez les angles AP des plans sagittal et axial. Prenez les angles latéraux des plans coronal et axial. Dans les deux cas, le plan axial correspond aux angles droit et gauche de l’arceau, tandis que les plans sagittal et coronal correspondent aux angles crânien et caudal.
- Répétez les étapes ci-dessus pour chaque angle préféré.
Résultats
En suivant le protocole présenté, des feuilles de route chirurgicales virtuelles peuvent être générées pour les vues AP et fluoroscopie latérale. Ces feuilles de route sont créées en plaçant une caméra au point de vue du chirurgien en VR pour capturer ses vues AP et latérales idéales, tout en plaçant un arrière-plan coloré derrière l’anatomie cible pour mieux reproduire une image de fluoroscopie. Le rapporteur VR est utilisé à ce stade pour enregistrer l’angle sous lequel le chirurgien visualise l’anatomie cible, enregistrée comme oblique antérieur droit ou gauche (RAO/LAO - décalage de la caméra vers la droite ou la gauche du patient, respectivement), et crânien ou antérieur caudal (CRA/CAA - décalage de la caméra vers la tête ou les pieds du patient, respectivement)15. Lors du développement de ce processus, des cas rétrospectifs ont été utilisés pour permettre de comparer les angles mesurés en RV avec les angles réels utilisés sur les machines à arceaux en chirurgie. Trois cas rétrospectifs différents ont été sélectionnés pour ce processus, chaque cas ayant été traité avec un dispositif chirurgical différent. La diversité de ces trois cas montre la polyvalence du protocole présenté. On a demandé au chirurgien de trouver des angles AP et latéraux préférés sans faire référence aux angles de l’arceau utilisés pendant la procédure, et les mesures VR ont ensuite été comparées à ces positions d’arceau préexistantes.
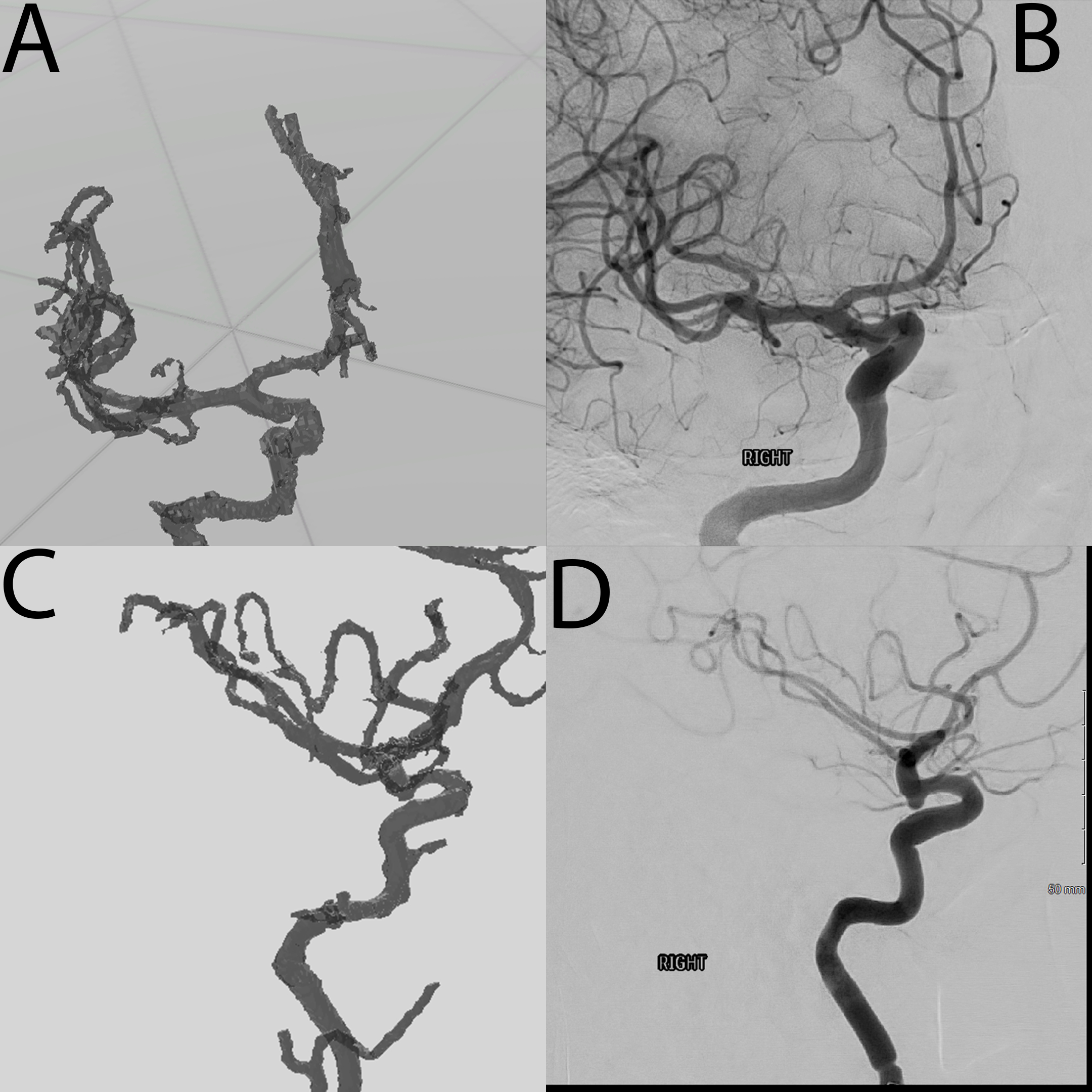
Dans le cas 1, l’angle de vision préféré déclaré pour le point d’accès a été mesuré en VR comme suit : 16° CRA, 12° RAO. Les mesures réelles utilisées en chirurgie pour ce cas étaient de 11° CRA et 13° RAO. L’erreur maximale parmi ces mesures est de 5° sur l’axe crânien/caudal. La figure 2A montre la vue AP déclarée du chirurgien en réalité virtuelle, suivie de la figure 2B, qui montre l’angle réel utilisé en chirurgie tel qu’il est vu en VR, et de la figure 2C, qui montre l’image de fluoroscopie chirurgicale. La comparaison des trois images montre que les images VR sont extraordinairement similaires à l’image de fluoroscopie réelle sous le même angle.
La vue latérale du même cas a montré l’un des nombreux défis de ce processus en raison de l’examen inadéquat du modèle 3D. En raison de cette revue défectueuse, certains vaisseaux étrangers segmentés qui, selon le chirurgien, inhibaient leur vision de l’anévrisme en RV et ne sont pas connectés à l’anatomie cible et, en tant que tels, ne sont pas reflétés avec précision en RV. Ces écarts résultaient d’une mauvaise communication dans l’anatomie cible requise lors de la séance de contrôle de la qualité avec le médecin. Ces divergences peuvent être vues dans la figure 2D-F, qui montre la latérale déclarée du chirurgien, la représentation VR basée sur les angles de fluoroscopie chirurgicale et les images de fluoroscopie réelles de gauche à droite, respectivement. À l’exception des vaisseaux étrangers, la vue AP déclarée par le chirurgien ressemble beaucoup à l’image de fluoroscopie réelle, bien que les mesures prises soient décalées de 6° et 26° dans les plans coronal et axial, respectivement. La réplication des mesures réelles en VR, comme le montre la figure 2E, représente également une vue similaire à la fluoroscopie réelle montrée à droite de la figure 2F, la principale divergence étant les vaisseaux supplémentaires anormaux. Dans ce cas, le rapporteur a été placé manuellement de manière moins fiable, ce qui peut expliquer la légère différence de mesure. Les cas futurs utilisent un rapporteur lié à l’anatomie afin d’assurer une précision maximale des mesures d’angle prises en VR.
Dans les cas 2 et 3, les vues sélectionnées pour être optimales en RV n’étaient pas représentatives des vues utilisées dans la procédure réelle. C’était une conséquence du placement initial des modèles en RV étant une étude en aveugle. Il est important de noter que le chirurgien a déclaré que les procédures de fluoroscopie peuvent avoir plusieurs angles de traitement acceptables et qu’il n’y a pas nécessairement un angle correct. À des fins de comparaison, des images ont été prises en RV sous les angles chirurgicaux rapportés. La figure 3 montre la vue du point d’accès VR de la figure 3A et la vue du point d’accès chirurgical de la figure 3B. Dans la figure 3, une comparaison similaire peut être faite entre les vues latérales de la figure 3C, D pour le cas 2. Pour le cas 3, la figure 4 montre la comparaison AP Figure 4A,B, ainsi que la comparaison latérale Figure 4C,D. Les similitudes entre les images de RV et de fluoroscopie de ces cas démontrent une fois de plus la capacité de la RV à être utilisée dans la planification chirurgicale.
Un avantage important de ce protocole est l’amélioration de la planification chirurgicale en exploitant des modèles 3D dans un environnement VR. Une étude antérieure sur l’efficacité de la RV dans la planification chirurgicale pour les cas oncologiques complexes a montré qu’environ 50 % des cas qui utilisaient la RV modifiaient l’approche chirurgicale par rapport au plan élaboré en utilisant uniquement des ensembles de données 2D9. La RV s’est également avérée utile dans le processus de planification chirurgicale de la résection d’une tumeur hépatique16,17, ainsi que dans les procédures impliquant une pathologie de la tête et du cou18. Le chirurgien participant à la création de ce protocole a déclaré que : en RV, je peux voir [l’anatomie] beaucoup mieux, ce qui montre les avantages de la RV pour les applications neurochirurgicales endovasculaires.

Figure 1 : Capture d’écran du logiciel de segmentation. La capture d’écran montre l’anatomie en surbrillance basée sur les masques. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 2 : Cas 1. (A) Vue antéropostérieure du cas 1 telle que placée par le chirurgien opératoire en VR. (B) Vue antéropostérieure du cas 1 en VR basée sur des mesures d’angle prises pendant la chirurgie. (C) Vue de fluoroscopie antéropostérieure capturée pendant la chirurgie. (D) Vue latérale du cas 1 tel qu’il a été placé par le chirurgien opératoire en VR. (E) Vue latérale du cas 1 en RV basée sur des mesures d’angle prises pendant la chirurgie. (F) Vue de fluoroscopie latérale capturée pendant la chirurgie. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 3 : Cas 2. (A) Vue antéropostérieure du cas 2 en VR basée sur des mesures d’angle prises pendant la chirurgie. (B) Vue fluoroscopique antéropostérieure du cas 2 capturée pendant la chirurgie. (C) Vue latérale du cas 2 en RV basée sur des mesures d’angle prises pendant la chirurgie. (D) Vue de fluoroscopie latérale du cas 2 capturée pendant la chirurgie. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}

Figure 4 : Cas 3. (A) Vue antéropostérieure du cas 3 en VR basée sur des mesures d’angle prises pendant la chirurgie. (B) Vue fluoroscopique antéropostérieure du cas 3 capturée pendant la chirurgie. (C) Vue latérale du cas 3 en RV basée sur des mesures d’angle prises pendant la chirurgie. (D) Vue de fluoroscopie latérale du cas 3 capturée pendant la chirurgie. Veuillez cliquer ici pour voir une version agrandie de cette figure.
{kind=link}
Dossier supplémentaire 1 : Un modèle 3D de rapporteurs a été développé et utilisé pour le protocole au format de fichier STL. Veuillez cliquer ici pour télécharger ce fichier.
Discussion
La modélisation 3D a été introduite dans les flux de travail médicaux avec l’avènement des technologies d’impression 3D 2,3,4,6,7,9,11, mais la RV offre de nouvelles applications de la technologie 3D au-delà d’un objet 3D physique. Les efforts pour reproduire l’anatomie et les scénarios dans un monde virtuel permettent une pratique médicale personnalisée sur des patients individuels 1,2,3,4,9,11,13,16. Ce travail démontre la capacité étendue de créer de nouvelles simulations préopératoires dans un monde numérique avec un minimum d’effort.
Tout au long du protocole présenté, plusieurs étapes sont essentielles à la réussite d’une affaire. Le facteur le plus important pour obtenir des résultats adéquats avec une résolution appropriée est d’acquérir la bonne imagerie médicale. Le processus présenté ne nécessite pas d’examens supplémentaires sur le patient, en utilisant le scanner CTA standard qui est prévu pour chaque cas d’anévrisme intracrânien. La plupart des scanners stockent les scans pendant une courte période, selon le modèle de scanner et le protocole du système de santé, ce qui permet au technicien en imagerie de télécharger les tranches minces acquises des scans généralement les tranches de moins de 1 mm d’épaisseur ne sont souvent pas stockées plus de quelques jours en raison de la taille du stockage. Ces fines tranches permettent plus de détails et l’inclusion d’anatomies plus petites, telles que des vaisseaux sanguins. Une fois la segmentation effectuée, le contrôle de la qualité des médecins doit être effectué pour s’assurer que les modèles 3D générés représentent l’anatomie du patient aussi précisément que possible dans les étapes futures. Le contrôle de la qualité de tous les modèles doit faire partie du processus de segmentation, minimisant le risque de propagation des erreurs dans le reste du protocole. Le contrôle de la qualité comprend les bords des vaisseaux sanguins et la segmentation de l’anévrisme séparément des vaisseaux environnants, de la même manière qu’il se présenterait avec un contraste. Le contrôle de la qualité avec un médecin est de la plus haute importance, car le médecin assume l’entière responsabilité de l’exactitude des modèles, surtout si les modèles doivent être utilisés dans la prise de décision ultérieure concernant le traitement du patient. Dans certaines circonstances, il peut être faisable ou pratique pour le médecin de compléter lui-même l’étape de segmentation.
La prochaine étape importante du protocole consiste à maintenir l’alignement du modèle spatial tout en intégrant l’outil de mesure du rapporteur. Blender s’est avéré être un outil extrêmement utile pour cette étape car il permet de combiner plusieurs types de fichiers STL en un seul fichier combiné avec plusieurs couches, chacune étant alignée spatialement et pouvant être colorée ou texturée pour plus de clarté. De plus, au cours de cette étape, le STL du rapporteur est ajouté afin que les données d’angle puissent être collectées en VR. Ce modèle de rapporteur a été spécifiquement développé à l’aide d’un outil de conception assistée par ordinateur (CAO), SolidWorks. En tirant parti des outils de dimensionnement de haute précision du logiciel, un arc avec des marques de tic indiquant tous les 5° dans les trois axes a été créé. Le rapporteur a également un réticule indiquant le véritable centre de ce modèle et permettant l’alignement sur le centre de l’anatomie du patient. Il y a également une grande barre dans le modèle signifiant (0,0) et doit être alignée avec le nez du patient. De plus, il est important de noter que cela a été fait manuellement et aurait pu augmenter le pourcentage d’erreur. L’alignement est de la plus haute importance pour garantir la précision de toutes les mesures d’angle potentielles. Une fois correctement aligné, le modèle est prêt pour la RV, où l’enregistrement du placement du modèle par le médecin permet de déterminer ultérieurement les angles auxquels le modèle a été placé. Pendant l’enregistrement, tout ce qui se trouve dans l’espace virtuel est enregistré en référence les uns aux autres, notamment le point de vue du médecin et les mouvements et rotations des modèles. Tirant pleinement parti de cet enregistrement et de la fonction de pause, une règle droite est placée du point de vue du médecin à travers le réticule du modèle de rapporteur, et les mesures peuvent être observées d’une manière remarquablement similaire à l’utilisation d’un rapporteur réel.
Cette méthodologie présente certaines limites. L’une de ces limitations est qu’il n’y a pas nécessairement une seule orientation correcte pour l’anévrisme lors de sa visualisation en fluoroscopie. Cela a conduit à de multiples tentatives de validation simplement en raison des différents angles de vue. Cette limitation peut être considérée comme un avantage possible dans la perspective qu’avec une familiarité supplémentaire qui découle de la manipulation du modèle 3D, il est possible que le médecin trouve une vue optimale par rapport à la méthode actuelle de détermination des angles dans la salle d’opération. Une autre limite potentielle de ce protocole est qu’il est possible de déterminer un angle de vue en RV qui ne serait pas réellement possible pour les arceaux. Cette limitation serait prise en compte et connue par le médecin en RV afin que des spécifications puissent être établies si cela faisait partie de la planification chirurgicale. Une autre limite, prouvant l’importance de l’étape de contrôle de la qualité, est que dans certains cas, les vaisseaux qui sont distaux de l’anévrisme, en réalité, ne sont pas vus aussi bien en évidence dans les procédures de fluoroscopie qu’ils le seraient s’ils étaient inclus dans le modèle en VR. Cela peut obliger le médecin à faire attention à un vaisseau qui ne gênerait pas nécessairement pendant la procédure en VR, ce qui entraîne un angle de vision sous-optimal généré en VR. Dans la segmentation, il est possible de segmenter la majorité des vaisseaux sanguins et la zone d’intérêt ; L’interventionniste pourrait choisir de basculer entre les modèles de navires pour s’assurer qu’il n’y aurait pas de navires supplémentaires dans son angle de vue, l’utilisation d’un contrat minimise également ce risque.
Le développement d’un rapporteur de modèle 3D et d’un protocole capable de fournir des mesures d’angle dans plusieurs axes au sein de la RV revêt une immense importance et promet un large éventail d’applications potentielles. Les avantages pourraient s’avérer multiformes, améliorant potentiellement diverses industries, de l’architecture et de l’ingénierie à la fabrication et aux applications militaires. Cependant, comme le montre ce protocole, son véritable potentiel brille dans le domaine des soins de santé, directement dans les parties de la planification chirurgicale des soins aux patients. Les chirurgiens peuvent utiliser cet outil pour évaluer et planifier méticuleusement tous les types de procédures en étant capables de visualiser et de mesurer les angles directement en VR. Cette technique est similaire aux travaux effectués pour le cathétérisme cardiaque19. L’un des avantages directs de la connaissance d’angles particuliers avant la procédure est la réduction significative du besoin d’une rotation complète à 360 degrés pendant la fluoroscopie, une technique d’imagerie couramment utilisée lors de la réparation d’anévrisme. En déterminant les angles nécessaires pour imiter la feuille de route chirurgicale virtuelle, les chirurgiens peuvent positionner l’équipement avec plus de précision, minimisant ainsi l’exposition du patient aux rayonnements. Cela contribue non seulement à la sécurité des patients en minimisant les risques associés à l’exposition aux rayonnements, mais rationalise également la procédure chirurgicale. Grâce à la réduction du temps consacré aux ajustements de fluoroscopie, les équipes chirurgicales peuvent fonctionner plus efficacement, ce qui réduit les temps d’intervention.
Les progrès récents de la modélisation 3D et de la technologie de réalité virtuelle permettent au personnel médical d’éviter la pensée improvisée pendant les chirurgies en obtenant une compréhension approfondie de l’anatomie interne d’un patient avant l’opération dans tous les cas, sauf les plus urgents 1,2,3,4,6,9,11,13,16 . Si le temps le permet, le personnel médical doit tirer parti de l’utilisation de la segmentation d’images médicales et des diagnostics VR pour approfondir sa compréhension du cas avant de placer le patient sur la table d’opération. Cela conduira finalement à une meilleure compréhension de chaque patient, ainsi qu’à une réduction du temps de chirurgie et du temps sous anesthésie.
Déclarations de divulgation
Matthew Bramlet est cofondateur d’Enduvo, Inc. Les autres auteurs déclarent qu’ils n’ont aucun intérêt financier pertinent ou matériel lié à la recherche décrite dans cet article.
Remerciements
Nous remercions tout particulièrement le comité d’examen pour ses commentaires perspicaces, ainsi que l’éditorial pour ses précieux commentaires, son expertise, ses conseils et son soutien tout au long du processus de rédaction de cet article. Nous apprécions grandement l’environnement de collaboration favorisé par les partenaires de mission d’OSF HealthCare System, qui a amélioré la qualité de ce travail. Merci à OSF HealthCare System pour avoir fourni des ressources et du soutien et au laboratoire d’imagerie et de modélisation avancées du Jump Simulation and Education Center pour leur aide.
matériels
| Name | Company | Catalog Number | Comments |
| 3D Slicer | N/A | Open source segmentation software | |
| Blender | N/A | Open-source CAD software that can import and edit organic models created through segmentation | |
| Enduvo | Enduvo | N/A | A proprietary VR viewer built for education, and our VR viewer of choice |
| McKesson PACS Change Healthcare Radiology Solution | McKesson | N/A | Any Picture Archiving and Communication System should be suffiecient, McKessen is simply our PACS software solution of choice. |
| Mimics | Materialise | N/A | Segmentation software |
| Quest | Oculus | N/A | Virtual Reality Headset |
| Steam VR | Steam | N/A | Computer to headset connection software. |
| VR capable computer | See Steam VR for minimal requirements. | ||
| VR-STL-Viewer | GitHub | N/A | A open-source VR viewer capable of importing and viewing .stl and can be used, however we cannot guarantee all functionalities mentioned in this paper will be available |
Références
- Xia, J., et al. Three-dimensional virtual reality surgical planning and simulation workbench for orthognathic surgery. Int J Adult Orthodon Orthognath Surg. 15 (4), 265-282 (2000).
- Boedecker, C., et al. Using virtual 3D-models in surgical planning: workflow of an immersive virtual reality application in liver surgery. Langenbecks Arch Surg. 406, 911-915 (2021).
- Reitinger, B., Bornik, A., Beichel, R., Schmalstieg, D. Liver surgery planning using virtual reality. IEEE Comput Graph Appl. 26 (6), 36-47 (2006).
- Robiony, M., et al. Virtual reality surgical planning for maxillofacial distraction osteogenesis: The role of Reverse Engineering Rapid Prototyping and cooperative work. J Oral Maxillofacial Surg. 65 (6), 1198-1208 (2007).
- Xia, J., et al. Three-dimensional virtual-reality surgical planning and soft-tissue prediction for orthognathic surgery. IEEE Trans Info Tech Biomed. 5 (2), 97-107 (2001).
- Kim, Y., Kim, H., Kim, Y. O. Virtual reality and augmented reality in plastic surgery: A Review. Arch Plastic Surg. 44 (3), 179-187 (2017).
- Ayoub, A., Pulijala, Y. The application of virtual reality and augmented reality in oral & maxillofacial surgery. BMC Oral Health. 19 (1), 238(2019).
- Ulbrich, M., et al. Advantages of a training course for surgical planning in virtual reality for oral and maxillofacial surgery: Crossover study. JMIR Serious Games. 11, e40541(2023).
- Lyuksemburg, V., et al. Virtual reality for preoperative planning in complex surgical oncology: A single-center experience. J Surg Res. 291, 546-556 (2023).
- Macario, A. What does one minute of operating room time cost. J Clin Anesth. 22 (4), 233-236 (2010).
- Bramlet, M., et al. Virtual reality visualization of patient specific heart model. J Cardiovasc Mag Res. 18 (1), 13(2016).
- Guillot, A., et al. Relationship between spatial abilities, mental rotation and functional anatomy learning. Adv Health Sci Edu. 12 (4), 491-507 (2006).
- Juhnke, B., et al. Use of virtual reality for pre-surgical planning in separation of conjoined twins: A case report. Proc Inst Mech Eng H. 233 (12), 1327-1332 (2019).
- Mattus, M. S., et al. Creation of patient-specific silicone cardiac models with applications in pre-surgical plans and hands-on training. J Vis Exp. (180), e62805(2022).
- Kern, M. Angiographic projections made simple: An easy guide to understanding oblique views. Cath Lab Digest. 19 (8), (2011).
- Reinschluessel, A. V., et al. Virtual reality for surgical planning - evaluation based on two liver tumor resections. Front Surg. 9, 821060(2022).
- Tang, R., et al. Augmented reality technology for preoperative planning and intraoperative navigation during Hepatobiliary Surgery: A review of current methods. Hepatobiliary Pancreat Dis Int. 17 (2), 101-112 (2018).
- Manzie, T., et al. Virtual reality digital surgical planning for jaw reconstruction: A usability study. ANZ J Surg. 93 (5), 1341-1347 (2023).
- Corren, Y. B., et al. CT-based Simulation of Projection Angiography Using the SlicerHeart Virtual Cath Lab [Poster Presentation]. World Congress of Pediatric Cardiology and Cardiac Surgery. , (2023).
Réimpressions et Autorisations
Demande d’autorisation pour utiliser le texte ou les figures de cet article JoVE
Demande d’autorisationExplorer plus d’articles
This article has been published
Video Coming Soon
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.