
Method Article
Abordagens pioneiras específicas do paciente para cirurgia de precisão usando imagens e realidade virtual
Neste Artigo
Resumo
Os avanços no tratamento endovascular substituíram procedimentos cirúrgicos abertos complexos por opções minimamente invasivas, como a troca valvar e o reparo de aneurismas. Este artigo propõe o uso de modelagem tridimensional (3D) e realidade virtual para auxiliar no posicionamento do arco em C, medidas angulares e geração de roteiros para o planejamento de procedimentos de laboratório de cateterismo neurointervencionista, minimizando o tempo do procedimento.
Resumo
O tratamento endovascular de anomalias vasculares complexas desloca o risco de procedimentos cirúrgicos abertos para o benefício de soluções procedimentais endovasculares minimamente invasivas. Procedimentos cirúrgicos abertos complexos costumavam ser a única opção para o tratamento de uma miríade de condições, como substituição da valva pulmonar e aórtica, bem como correção de aneurisma cerebral. No entanto, devido aos avanços nos dispositivos entregues por cateter e à experiência do operador, esses procedimentos (juntamente com muitos outros) agora podem ser realizados por meio de procedimentos minimamente invasivos realizados através de uma veia ou artéria central ou periférica. A decisão de mudar de um procedimento aberto para uma abordagem endovascular é baseada em imagens multimodais, muitas vezes incluindo conjuntos de dados de imagens 3D Digital Imaging and Communications in Medicine (DICOM). Utilizando essas imagens 3D, nosso laboratório gera modelos 3D da anatomia patológica, permitindo assim a análise pré-procedimento necessária para pré-planejar componentes críticos do procedimento laboratorial de cateterismo, a saber, posicionamento do arco em C, medição 3D e geração idealizada de roteiro. Este artigo descreve como tomar modelos 3D segmentados de patologia específica do paciente e prever posições generalizadas do arco em C, como medir medidas bidimensionais (2D) críticas de estruturas 3D relevantes para as projeções de fluoroscopia 2D e como gerar análogos de roteiro de fluoroscopia 2D que podem auxiliar no posicionamento adequado do arco em C durante procedimentos de laboratório de cateterismo.
Introdução
O tratamento de aneurismas intracranianos é um aspecto desafiador da cirurgia neurointervencionista, necessitando de planejamento cirúrgico preciso para garantir os melhores resultados para os pacientes. Nos últimos anos, a tecnologia de realidade virtual (RV) tornou-se uma ferramenta promissora para melhorar o planejamento cirúrgico, fornecendo aos cirurgiões acesso a modelos anatômicos imersivos específicos do paciente em um ambiente virtual 3D 1,2,3,4,5,6,7,8 . Este artigo apresenta um protocolo abrangente para o uso de imagens médicas e segmentação, modelagem 3D, planejamento cirúrgico de RV e geração de roteiro virtual idealizado para auxiliar no planejamento cirúrgico para o tratamento de aneurismas.
A combinação dessas etapas culmina em uma abordagem de planejamento cirúrgico virtual, permitindo que os médicos mergulhem em um ambiente virtual e obtenham uma compreensão abrangente da anatomia única de um paciente antes de um procedimento cirúrgico. Essa abordagem imersiva capacita os cirurgiões a explorar o posicionamento ideal e simular vários cenários de procedimentos. O registro desses cenários pode fornecer informações sobre a colocação de equipamentos cirúrgicos do mundo real, como o posicionamento do arco em C.
Além dos ângulos de posicionamento, também é possível medir a anatomia em um ambiente virtual usando ferramentas de medição projetadas para o espaço 3D. Essas medidas podem fornecer informações sobre o correto dimensionamento e a forma do dispositivo a ser utilizado em um caso de aneurisma intracraniano9.
Este protocolo apresenta um processo abrangente que combina perfeitamente imagens médicas, segmentação de imagens, preparação de modelos de RV e geração de roteiro cirúrgico virtual para melhorar o processo de planejamento cirúrgico. Utilizando uma combinação de tecnologias de ponta, esse protocolo oferece oportunidades de economizar tempo valioso na sala de cirurgia10, bem como aumentar a confiança do cirurgião e a compreensão de casos cirúrgicos complexos 11,12,13.
Protocolo
DICOMs ou DICOMs humanos não identificados para atendimento ao paciente são usados de acordo com as diretrizes institucionais para o atendimento ao paciente, a Lei de Portabilidade e Responsabilidade de Seguros de Saúde de 1996 (HIPAA) e a colaboração com o Conselho de Revisão Institucional (IRB) quando apropriado.
1. Segment panatomia específica
- Aquisição de exames médicos
- Comece o processo de segmentação com um médico ou cirurgião solicitando exames médicos. Esses exames fazem parte do protocolo padrão de atendimento ao paciente e não introduzem procedimentos extras.
- Se o médico souber que solicitará segmentação, certifique-se de que ele solicite conjuntos de dados em fatias finas para serem exportados do scanner de ressonância magnética ou tomografia computadorizada. Na maioria dos casos, essas fatias finas têm menos de 1 mm de espessura; no entanto, essa resolução pode variar entre os scanners. Faça tomografias computadorizadas com contraste para garantir a segmentação adequada da vasculatura e dos pools sanguíneos.
- Para aquisição dos dados, adquirir sequência 3D de RM com os seguintes parâmetros sugeridos: executar no axial, garantir espessura de corte e espaçamento entre cortes de 0,625 mm ou menor, espaçamento zero. Adquira a série CT 3D com os seguintes parâmetros sugeridos: scanner de corte no modo helicoidal, espessura de corte e espaço entre fatias de 0,625mm, por exemplo, Neuro: Kvp de 120, faixa Smart mA de 100-740, velocidade de rotação em .5ms, ou Cardíaco: Kvp de 70, faixa Smart mA de 201-227 (modo MA inteligente 226), velocidade de rotação em 0,28 ms14. Siga os parâmetros helicoidais da instituição para cada parte do corpo.
NOTA: A sequência 3D deve ser adquirida para que, na reconstrução, haja uma resolução quase isotrópica nos planos axial, coronal e sagital. Na maioria dos casos, as fatias mais finas devem ser adquiridas. A sequência 3D é executada em complemento ao protocolo padrão de geração de imagens da instituição. No entanto, ele é executado ao mesmo tempo, portanto, há um mínimo de trabalho adicional, exposição à radiação e despesas para a equipe clínica e o paciente.
- Para aquisição dos dados, adquirir sequência 3D de RM com os seguintes parâmetros sugeridos: executar no axial, garantir espessura de corte e espaçamento entre cortes de 0,625 mm ou menor, espaçamento zero. Adquira a série CT 3D com os seguintes parâmetros sugeridos: scanner de corte no modo helicoidal, espessura de corte e espaço entre fatias de 0,625mm, por exemplo, Neuro: Kvp de 120, faixa Smart mA de 100-740, velocidade de rotação em .5ms, ou Cardíaco: Kvp de 70, faixa Smart mA de 201-227 (modo MA inteligente 226), velocidade de rotação em 0,28 ms14. Siga os parâmetros helicoidais da instituição para cada parte do corpo.
- Peça ao médico que solicite a segmentação do modelo, especificando qual anatomia será o foco central para o processo de segmentação (Um médico ou cirurgião geralmente completa essa etapa).
- Baixe os dados de digitalização e salve-os localmente.
- Se mais de uma varredura foi feita, certifique-se de que os conjuntos de dados DICOM da varredura sejam comparados para determinar qual conjunto de varredura tem a configuração de fatia mais fina e o melhor contraste, pois isso fornecerá os modelos 3D de maior resolução quando segmentados.
- Uma vez que o melhor conjunto de imagens é determinado, baixe-o do banco de dados de imagens para segmentação, anonimato ou deixe os dados como estão com informações de saúde protegidas (PHI). Este protocolo funcionará com um DICOM anonimizado.
- Importe o conjunto de dados DICOM para o software de segmentação.
NOTA: O conjunto de instruções a seguir usa termos específicos do software de segmentação Materialise Mimics. Embora o Materialise Suite seja um software baseado em assinatura, existem alternativas de código aberto, como o 3DSlicer. Os nomes e a terminologia das ferramentas podem variar entre outras ferramentas de segmentação. - Crie uma máscara áspera da anatomia alvo, como osso, pool de sangue, aneurisma, etc.
- Na guia SEGMENTO , selecione Nova ferramenta Máscara .
- Defina os limites superiores e inferiores do limite clicando e arrastando ambos para capturar o máximo possível da anatomia alvo relevante, limitando a captura dos tecidos circundantes. Clique e arraste os limites dentro da ferramenta de limite ou insira a Unidade Hounsfield (HU) desejada.
- Ao definir limites, corte em uma área específica da varredura para evitar a seleção excessiva de tecido circundante. Os limites dos limiares superior e inferior variam muito dependendo do tipo de varredura, do tipo de sequência, da quantidade de contraste e do paciente.
- Clique em OK para finalizar a máscara bruta.
- Use outras ferramentas na guia SEGMENTO para remover partes desnecessárias da máscara ou adicionar tecido ausente, conforme necessário.
- Use a ferramenta Region Grow para separar todos os voxels da máscara diretamente conectados a um voxel selecionado pelo usuário; use Edit Mask para adicionar ou remover voxels na máscara através das janelas 2D e 3D; use Multiple Slices Edit para adicionar ou remover voxels através da interpolação entre fatias mais distantes; e use Preencher Buracos ou Preenchimento Inteligente para preencher buracos de um tamanho definido pelo usuário dentro da máscara.
- Continue refinando a máscara fazendo uso de ferramentas na guia até que a interpolação 2D para 3D seja a mais precisa possível.
- Repita as etapas 1.5 e 1.6 para todas as anatomias alvo.
- Consulte um médico sobre a segmentação concluída para garantir a precisão.
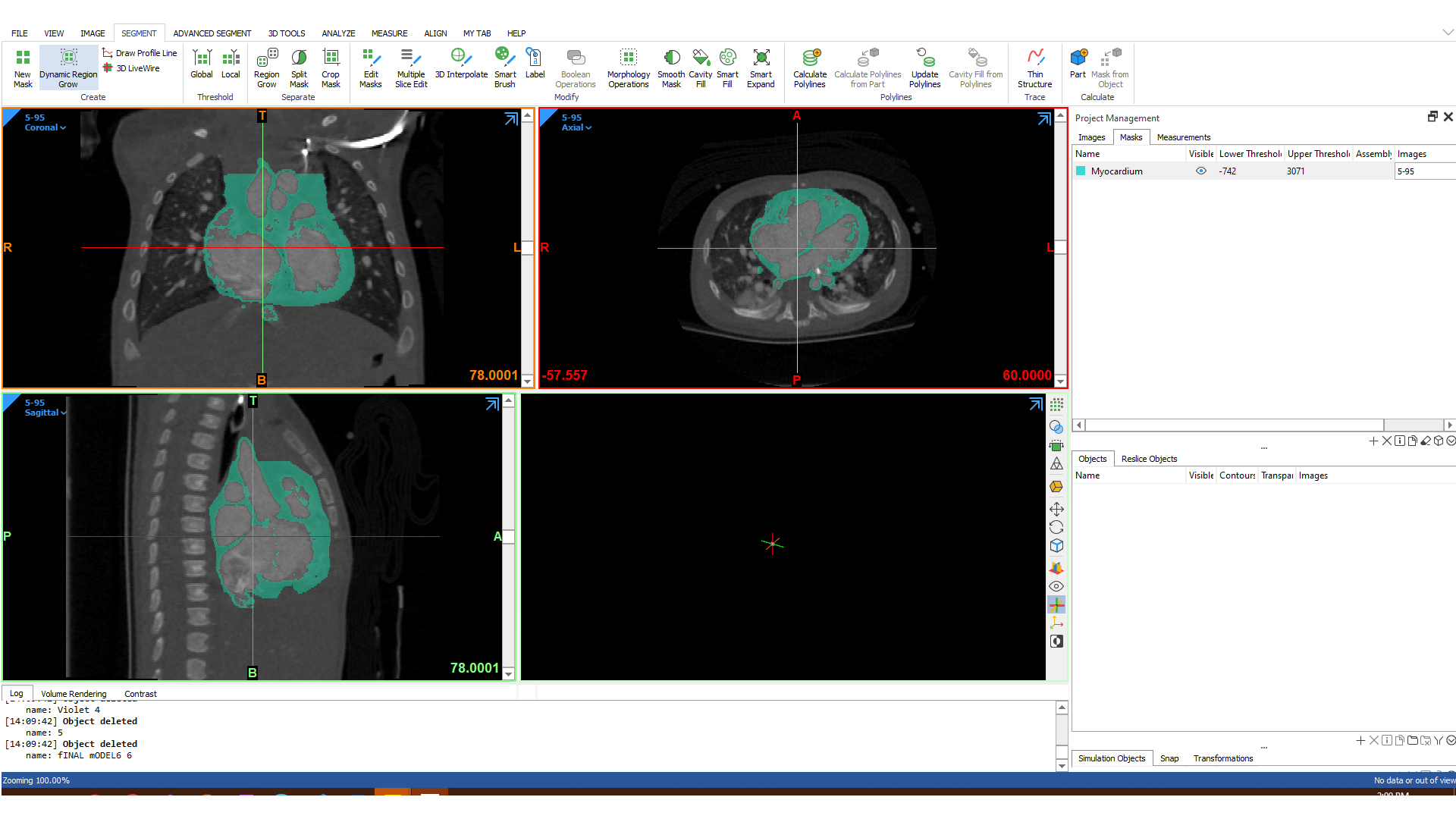
- Mostre as máscaras preenchidas a um médico para garantir que a anatomia importante não tenha sido omitida e o excesso de anatomia não tenha sido incluído. Na maioria dos casos, consulte o médico que solicita a segmentação para controle de qualidade. O médico garante que a porção da DICOM destacada pela máscara em cada corte seja o mais precisa possível (ver Figura 1).
- Segmentação de exportação para processamento posterior.
- Converta máscaras finalizadas em partes usando a ferramenta Calcular peça , localizada no menu Gerenciamento de projetos no lado direito.
- Exporte peças calculadas para arquivos 3D clicando com o botão direito do mouse em A peça e selecionando Exportar STL.
2. Prepare o modelo para a realidade virtual
- Crie um novo projeto do Blender e remova os elementos de cena padrão. Pressione a tecla a para realçar todos os elementos visíveis e, em seguida, x seguido de Enter para removê-los da cena.
NOTA: O Blender é um software de modelagem gratuito e de código aberto. Enquanto outros softwares de modelagem podem ser capazes de realizar as mesmas tarefas, a terminologia usada nesta etapa será específica para o Blender. - Importe os arquivos de anatomia por meio de File > Import > Stl (.stl).
- Alinhar a anatomia do paciente com a origem do mundo.
- Selecione toda a anatomia do paciente para manter o posicionamento relativo. Para fazer isso, pressione a tecla a depois que todos os arquivos forem importados.
- Use as ferramentas Mover e Girar para alinhar a anatomia com a origem do mundo. Certifique-se de que o nariz do paciente esteja alinhado com um eixo, com o eixo perpendicular entrando em contato com a área da orelha e o topo do crânio, respectivamente. Use visualizações ortográficas, que podem ser ativadas com o widget no canto superior direito da interface do liquidificador.
- Importe o transferidor de RV e alinhe-o à anatomia do paciente. Este transferidor foi especialmente projetado pela equipe de engenharia da OSF para ajudar na aquisição de ângulos de arco em C em RV, com base em ângulos no espaço 3D.
- Importe o arquivo .stl do transferidor do Arquivo Suplementar 1.
- Alinhar (0,0) no transferidor, representado pela maior marca de medida, com o nariz do paciente. Orientar a folga nos braços do transferidor em direção aos pés do paciente.
- Dimensione o transferidor de acordo. Para a maioria dos casos, dimensione o transferidor muito pequeno, a fim de garantir a facilidade de medição após o dimensionamento em RV. No caso de aneurismas, tente escalar o transferidor de forma que ele fique fora da área do aneurisma.
- Alinhar as origens da anatomia com a origem do mundo.
- Clique com o botão direito do mouse no visor principal e selecione Ajustar > cursor à origem mundial. Isso garante que o cursor 3D esteja alinhado com a origem global.
- Selecione todos os modelos visíveis com a tecla a .
- Clique com o botão direito do mouse, clique no visor e selecione Definir origem > origem como cursor 3D. Isso alinha a origem 3D de todos os modelos ao mesmo ponto, garantindo que eles se alinhem e escalem corretamente quando importados para VR.
- Adicione textura ou cor aos modelos conforme desejado para melhor distinção em RV.
- Esta é uma etapa opcional. Selecione os arquivos .stl individuais e clique na guia Propriedades do material no lado direito da tela. Nesta guia, a cor base pode ser ajustada para a cor desejada. Repita esta etapa para cada objeto a ser adicionado cor.
- Exporte o modelo finalizado como um único. arquivo glb/.gltf. Certifique-se de que nenhuma das opções Limitar a na guia Incluir da janela de exportação esteja selecionada.
NOTA: O. O formato de arquivo glb/.gltf reflete o tipo de arquivo necessário para uso no software de RV, bem como para upload para a biblioteca 3D do NIH. Outros tipos de exportação podem ser necessários para diferentes softwares.
3. Treinamento de profissionais médicos em realidade virtual
NOTA: As instruções a seguir foram escritas para serem usadas com o software de sala de aula digital Enduvo. Embora seja possível usar outros softwares de visualização 3D, a capacidade de mover modelos, colocar câmeras e registrar o posicionamento do médico são algumas características que tornam este software ideal para esse procedimento. Diferentes fones de ouvido VR, controles e combinações de software podem ter controles diferentes.
- Crie uma nova lição.
- Importe o arquivo .gltf exportado na etapa 2.7 no menu de criação da lição. O software pode produzir uma mensagem informando: O tipo de arquivo (GLB) que você está tentando carregar não é totalmente suportado no momento. Ignore esta mensagem e clique no botão Confirmar .
- Abra a lição em RV para finalização.
- Usando o menu de transparência acessado pressionando o thumbpad ou joystick de um controle, oculte todos os modelos, exceto a anatomia do alvo. O aneurisma deve ser o único modelo visível.
- Coloque o cirurgião ou médico em RV e dê-lhe algum tempo para se familiarizar com o espaço 3D e funções e a anatomia na lição.
- Uma vez que o cirurgião está confortável com a anatomia, comece a gravar.
- Inicie a função de gravação usando o botão virtual no espaço VR ou o botão de gravação no monitor secundário.
- Deixe o cirurgião girar a anatomia alvo para encontrar ângulos de visão preferidos para as incidências anteroposterior (AP) e fluoroscopia lateral. Depois de encontrar um ângulo preferido, peça ao cirurgião para fazer uma breve pausa e declarar que encontrou um ângulo preferido e se o ângulo de visão atual é AP ou lateral.
- Depois que todos os ângulos preferidos forem encontrados, pare de gravar com o botão VR ou monitor externo.
4. Geração de roteiro de fluoroscopia em RV
- Adquira análogos de fluoroscopia usando a colocação do cirurgião gravado.
- Coloque uma imagem imitando o fundo de tonalidade cinza de uma imagem de fluoroscopia atrás do modelo no espaço virtual. Use o botão de seleção no controle, geralmente o gatilho na parte traseira do controle, para manipular a imagem conforme necessário. Isso cria uma cor de fundo consistente que facilita a visualização da anatomia e é mais representativa da fluoroscopia.
- Coloque a câmera de acordo com a visão do cirurgião no momento declarado como um ângulo de visão preferido, garantindo que a câmera esteja apontada aproximadamente para o centro da anatomia alvo. O cirurgião aparecerá como um conjunto de óculos flutuantes e dois controladores em RV.
- Capture um instantâneo 2D com a câmera na posição desejada. Repita a etapa para cada ângulo preferido.
- Adquira ângulos de arco em C usando os movimentos do cirurgião e transferidor.
- Pause a aula gravada quando o cirurgião declarar um ângulo de visão preferido.
- Clique no Trackpad para abrir o menu rápido e marque a caixa de seleção Ligar/Desligar para exibir o transferidor conectado ao modelo.
- Use o botão de agarrar do controlador para selecionar e manipular um ponteiro ou borda reta em linha com o ponto de vista do cirurgião, passando também pela origem do transferidor.
- Recue do modelo e visualize os ângulos dos pontos de vista ortográficos correspondentes aos movimentos do arco em C.
- Para um caso de neurologia com o nariz do paciente orientado a 0° em todos os eixos do arco em C, tome os ângulos AP dos planos sagital e axial. Pegue os ângulos laterais dos planos coronal e axial. Em ambos os casos, o plano axial corresponde aos ângulos direito e esquerdo do arco em C, enquanto os planos sagital e coronal correspondem aos ângulos cranial e caudal.
- Repita as etapas acima para cada ângulo preferido.
Resultados
Seguindo o protocolo apresentado, roteiros cirúrgicos virtuais podem ser gerados tanto para as incidências AP quanto para fluoroscopia lateral. Esses roteiros são criados colocando uma câmera no ponto de vista do cirurgião em RV para capturar suas vistas AP e laterais ideais, ao mesmo tempo em que colocam um fundo colorido atrás da anatomia alvo para melhor replicar uma imagem de fluoroscopia. O transferidor de RV é usado nesse momento para registrar o ângulo a partir do qual o cirurgião está visualizando a anatomia alvo, registrado como oblíquo anterior direito ou esquerdo (RAO/LAO - deslocamento da câmera para a direita ou esquerda do paciente, respectivamente) e anterior cranial ou caudal (CRA/CAA - deslocamento da câmera em direção à cabeça ou pés do paciente, respectivamente)15. Ao desenvolver esse processo, casos retrospectivos foram usados para fornecer a capacidade de comparar ângulos medidos em RV com os ângulos reais usados nos aparelhos de arco em C em cirurgia. Três casos retrospectivos diferentes foram selecionados para este processo, cada caso tendo sido tratado com um dispositivo cirúrgico diferente. A diversidade desses três casos mostra a versatilidade do protocolo apresentado. Solicitou-se ao cirurgião que encontrasse os ângulos AP e lateral preferidos sem fazer referência aos ângulos do arco C utilizados durante o procedimento, e as medidas de RV foram então comparadas com essas posições pré-existentes do arco em C.
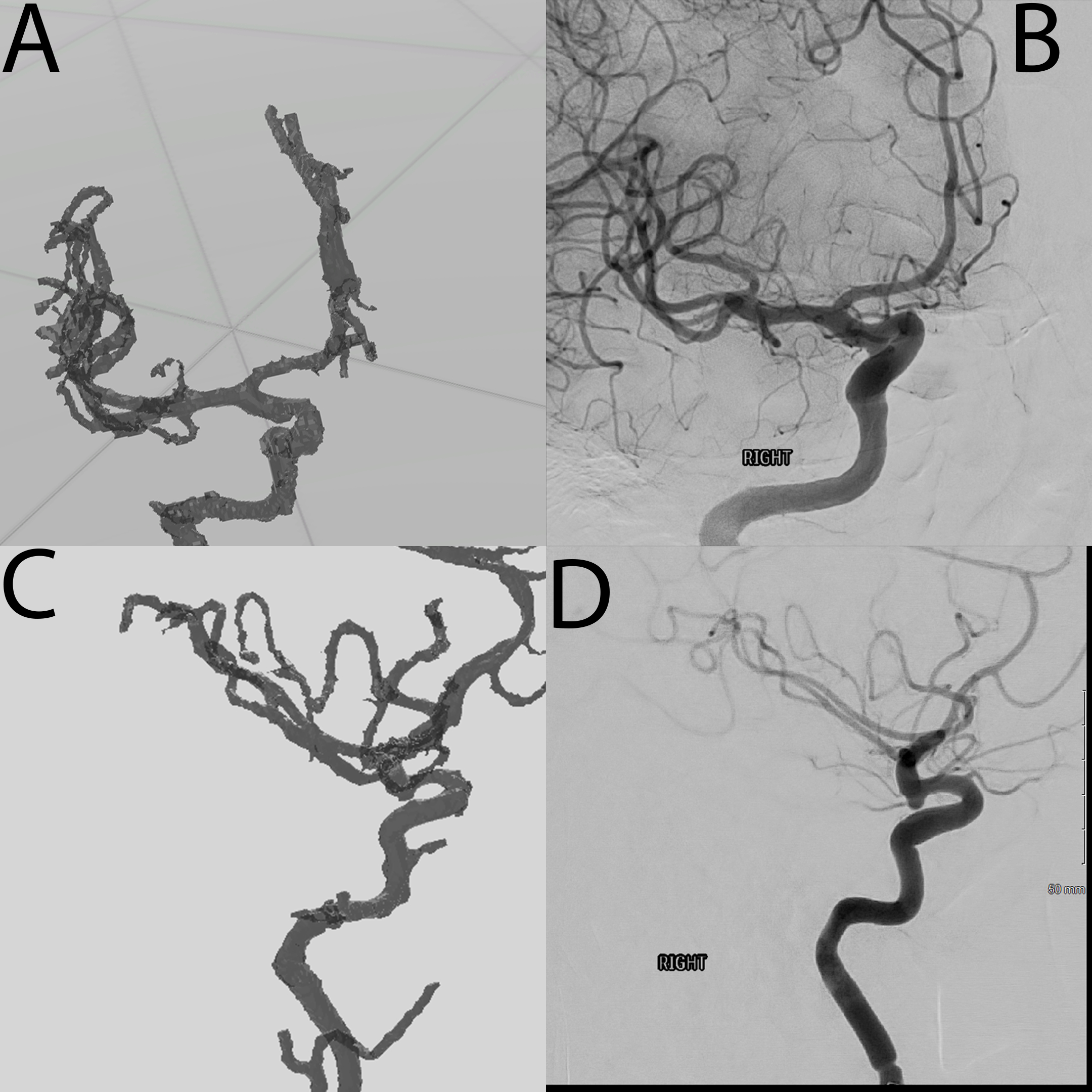
No caso 1, o ângulo de visão AP preferencial declarado foi medido em RV como 16° CRA, 12° RAO. As medidas reais utilizadas na cirurgia para este caso foram 11° PCR e 13° RAO. O erro máximo entre essas medidas é de 5° no eixo crânio/caudal. A Figura 2A mostra a incidência em AP declarada do cirurgião em realidade virtual, seguida da Figura 2B, que mostra o real ângulo utilizado na cirurgia, como visto na RV, e da Figura 2C, que mostra a imagem cirúrgica fluoroscópica. A comparação das três imagens mostra que as imagens de RV são extraordinariamente semelhantes à imagem real de fluoroscopia no mesmo ângulo.
A visão lateral do mesmo caso mostrou um dos muitos desafios desse processo devido ao modelo 3D ser revisado inadequadamente. Devido a essa falha na revisão, havia alguns vasos estranhos segmentados que, segundo o cirurgião, inibiam a visão do aneurisma na RV e não estão conectados à anatomia alvo e, como tal, não são refletidos com precisão na RV. Essas discrepâncias foram resultado de falha de comunicação na anatomia alvo requerida durante a sessão de controle de qualidade com o médico. Essas discrepâncias podem ser vistas na Figura 2D-F, que mostra a lateral declarada do cirurgião, a representação da RV baseada nos ângulos cirúrgicos de fluoroscopia e as imagens reais de fluoroscopia da esquerda para a direita, respectivamente. Com exceção dos vasos estranhos, a incidência AP declarada pelo cirurgião se assemelha muito à imagem real da fluoroscopia, apesar das medidas realizadas estarem 6° e 26° off nos planos coronal e axial, respectivamente. A replicação das medidas reais em RV, como mostrado na Figura 2E, também mostra uma visão semelhante à fluoroscopia real mostrada à direita da Figura 2F, sendo a principal discrepância os vasos extras anômalos. Este caso empregou um posicionamento manual menos confiável da ferramenta transferidor, o que pode explicar a pequena diferença na medição. Casos futuros empregam um transferidor que está ligado à anatomia, a fim de garantir a máxima precisão das medidas angulares realizadas na RV.
Nos casos 2 e 3, as incidências selecionadas como ótimas em RV não foram representativas das incidências utilizadas no procedimento real. Isso foi consequência da colocação inicial dos modelos na RV ser um estudo cego. É importante notar que o cirurgião expressou que os procedimentos de fluoroscopia podem ter múltiplos ângulos de tratamento aceitáveis, e não há necessariamente um ângulo correto. Para efeito de comparação, foram obtidas imagens em RV a partir dos ângulos cirúrgicos relatados. A Figura 3 mostra o AP do RV na Figura 3A e o AP cirúrgico na Figura 3B. Na Figura 3, uma comparação semelhante pode ser feita entre as incidências laterais na Figura 3C,D para o caso 2. Para o caso 3, a Figura 4 mostra a comparação AP Figura 4A,B, bem como a comparação lateral Figura 4C,D. As semelhanças entre as imagens de RV e fluoroscopia desses casos demonstram ainda mais a capacidade da RV de ser utilizada no planejamento cirúrgico.
Um benefício importante deste protocolo é a melhoria do planejamento cirúrgico ao alavancar modelos 3D em um ambiente de RV. Estudo prévio sobre a efetividade da RV no planejamento cirúrgico de casos oncológicos complexos mostrou que cerca de 50% dos casos que empregaram o uso da RV alteraram a abordagem cirúrgica a partir do plano feito utilizando apenas dados2D9. A RV também tem se mostrado útil no processo de planejamento cirúrgico para ressecção de tumores hepáticos16,17, bem como em procedimentos envolvendo patologias de cabeça epescoço18. O cirurgião que participou da criação desse protocolo afirmou que: na RV eu consigo ver [a anatomia] muito melhor, mostrando o benefício da RV para aplicações neurocirúrgicas endovasculares.

Figura 1: Captura de tela de dentro do software de segmentação. A captura de tela mostra a anatomia destacada com base em Máscaras. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 2: Caso 1. (A) Vista anteroposterior do Caso 1 colocada pelo cirurgião cirúrgico em RV. (B) Visão anteroposterior do Caso 1 em RV baseada nas medidas angulares realizadas durante a cirurgia. (C) Fluoroscopia anteroposterior captada durante a cirurgia. (D) Vista lateral do Caso 1 colocada pelo cirurgião cirúrgico em RV. (E) Vista lateral do Caso 1 em RV baseada nas medidas angulares realizadas durante a cirurgia. (F) Fluoroscopia lateral captada durante a cirurgia. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 3: Caso 2. (A) Visão anteroposterior do Caso 2 em RV baseada nas medidas angulares realizadas durante a cirurgia. (B) Incidência de fluoroscopia anteroposterior do Caso 2 captado durante a cirurgia. (C) Vista lateral do Caso 2 em RV baseada nas medidas angulares realizadas durante a cirurgia. (D) Fluoroscopia lateral do Caso 2 captada durante a cirurgia. Clique aqui para ver uma versão maior desta figura.
{kind=link}

Figura 4: Caso 3. (A) Visão anteroposterior do Caso 3 em RV baseada nas medidas angulares realizadas durante a cirurgia. (B) Fluoroscopia anteroposterior do Caso 3 captada durante a cirurgia. (C) Visão lateral do Caso 3 em RV baseada nas medidas angulares realizadas durante a cirurgia. (D) Visão de fluoroscopia em perfil do Caso 3 capturado durante a cirurgia. Clique aqui para ver uma versão maior desta figura.
{kind=link}
Arquivo Suplementar 1: Um modelo 3D de transferidores foi desenvolvido e utilizado para o protocolo em formato de arquivo STL. Clique aqui para baixar este arquivo.
Discussão
A modelagem 3D foi introduzida nos fluxos de trabalho médicos com o advento das tecnologias de impressão 3D 2,3,4,6,7,9,11, mas a RV oferece novas aplicações da tecnologia 3D além de um objeto 3D físico. Esforços para replicar anatomia e cenários em um mundo virtual permitem a prática médica personalizada em pacientes individuais 1,2,3,4,9,11,13,16. Este trabalho demonstra a capacidade expansiva de criar novas simulações pré-cirúrgicas em um mundo digital com o mínimo de esforço.
Ao longo do protocolo apresentado, existem várias etapas que são fundamentais para o sucesso de um caso. O fator mais importante para produzir resultados adequados com resolução adequada é adquirir a imagem médica correta. O processo apresentado não requer exames adicionais no paciente, usando a tomografia computadorizada padrão que é programada para cada caso de aneurisma intracraniano. A maioria dos scanners armazenará os exames por um curto período de tempo, dependendo do modelo do scanner e do protocolo do sistema de saúde, permitindo que o técnico de imagem carregue as fatias finas adquiridas dos exames normalmente com menos de 1 mm de espessura As fatias geralmente não são armazenadas por mais de alguns dias devido ao tamanho do armazenamento. Essas fatias finas permitem maiores detalhes e a inclusão de anatomia menor, como vasos sanguíneos. Após a segmentação, o controle de qualidade do médico deve ser concluído para garantir que os modelos 3D gerados representem a anatomia do paciente com a maior precisão possível em etapas futuras. O controle de qualidade de todos os modelos deve fazer parte do processo de segmentação, minimizando o potencial de propagação de erros ao longo do restante do protocolo. O controle de qualidade inclui bordas dos vasos sanguíneos e segmentação do aneurisma separadamente dos vasos circunvizinhos, semelhante ao que apresentaria com contraste. O controle de qualidade com um médico é de extrema importância, pois o médico detém toda a responsabilidade pela precisão dos modelos, especialmente se os modelos forem usados na tomada de decisão posterior do tratamento do paciente. Em algumas circunstâncias, pode ser viável ou prático para o médico completar a etapa de segmentação por conta própria.
O próximo passo importante no protocolo é manter o alinhamento do modelo espacial enquanto integra a ferramenta de medição do transferidor. O Blender provou ser uma ferramenta extremamente útil para esta etapa, pois permite a combinação de vários tipos de arquivos STL em um arquivo combinado com várias camadas, cada uma das quais é espacialmente alinhada e pode ser colorida ou texturizada para maior clareza. Além disso, durante esta etapa, o transferidor STL é adicionado para que os dados de ângulo possam ser coletados em RV. Este modelo de transferidor foi desenvolvido especificamente usando uma ferramenta de projeto auxiliado por computador (CAD), SolidWorks. Aproveitando as ferramentas de dimensionamento de alta precisão dentro do software, foi criado um arco com marcas de tique denotando cada 5° nos três eixos. O transferidor também possui miras que denotam o verdadeiro centro daquele modelo e permitem o alinhamento ao centro da anatomia do paciente. Há também uma grande barra dentro do modelo significando (0,0) e deve ser alinhada com o nariz do paciente. Além disso, é importante notar que isso foi feito manualmente e pode ter aumentado a porcentagem de erro. O alinhamento é de extrema importância para garantir a precisão de todas as medições de ângulo potenciais. Uma vez devidamente alinhado, o modelo está pronto para a RV, onde o registro da colocação do modelo pelo médico permite a determinação futura dos ângulos em que o modelo foi colocado. Durante a gravação, tudo dentro do espaço virtual é gravado em referência uns aos outros, principalmente o ponto de vista do médico (POV) e os movimentos e rotações das modelos. Aproveitando ao máximo essa gravação e o recurso de pausa, uma borda reta é colocada a partir do POV do médico através da mira do modelo transferidor, e as medidas podem ser observadas de maneira notavelmente semelhante ao uso de um transferidor real.
Essa metodologia tem algumas limitações. Uma dessas limitações é que não há necessariamente uma única orientação correta para o aneurisma ao visualizá-lo na fluoroscopia. Isso levou a várias tentativas de validação simplesmente devido aos diferentes ângulos de visão. Essa limitação pode ser vista como um possível benefício da perspectiva de que, com a familiaridade adicional advinda da manipulação do modelo 3D, é possível que o médico encontre uma visão ótima em comparação com o método atual de determinação de ângulos dentro da suíte de cirurgia. Outra limitação potencial desse protocolo é que é possível determinar um ângulo de visão na RV que não seria realmente possível para o arco em C chegar. Essa limitação seria levada em conta e conhecida pelo médico em RV para que especificações pudessem ser feitas caso isso se tornasse parte do planejamento cirúrgico. Outra limitação, comprovando a importância da etapa de controle de qualidade, é que, em alguns casos, os vasos distais do aneurisma, na realidade, não são vistos com tanto destaque nos procedimentos fluoroscópicos como seriam se incluídos no modelo em RV. Isso pode forçar o médico a estar atento a um vaso que não necessariamente estaria no caminho durante o procedimento em RV, levando a um ângulo de visão subótimo sendo gerado na RV. Na segmentação, é possível segmentar a maioria dos vasos sanguíneos e a área de interesse; O intervencionista poderia optar por alternar entre modelos de embarcações para garantir que não haveria vasos adicionais em seu ângulo de visão, o uso de contrato minimiza esse risco também.
O desenvolvimento de um transferidor modelo 3D e um protocolo que pode fornecer medições de ângulo em múltiplos eixos dentro da RV tem imensa importância e promete uma ampla gama de aplicações potenciais. Os benefícios podem ser multifacetados, potencialmente melhorando várias indústrias, desde arquitetura e engenharia até manufatura e aplicações militares. No entanto, como mostrado neste protocolo, seu verdadeiro potencial resplandece no âmbito da assistência à saúde, diretamente nas parcelas de planejamento cirúrgico da assistência ao paciente. Os cirurgiões podem utilizar essa ferramenta para avaliar e planejar meticulosamente todos os tipos de procedimentos, sendo capazes de visualizar e medir ângulos diretamente na RV. Essa técnica assemelha-se ao trabalho realizado para cateterismo cardíaco19. Um benefício direto de conhecer ângulos particulares pré-procedimento é a redução significativa na necessidade de um spin completo de 360 graus durante a fluoroscopia, uma técnica de imagem comumente empregada durante o reparo do aneurisma. Ao determinar os ângulos necessários para mimetizar o roteiro cirúrgico virtual, os cirurgiões podem posicionar o equipamento com mais precisão, minimizando assim a exposição à radiação para o paciente. Isso não só contribui para a segurança do paciente, minimizando os riscos associados à exposição à radiação, mas também agiliza o procedimento cirúrgico. Com o tempo reduzido gasto nos ajustes de fluoroscopia, as equipes cirúrgicas podem operar de forma mais eficiente, levando a tempos de procedimento mais curtos.
Avanços recentes na modelagem 3D e na tecnologia de realidade virtual permitem que a equipe médica evite o pensamento improvisacional durante as cirurgias, obtendo uma compreensão profunda da anatomia interna do paciente antes da operação em todos os casos, exceto nos mais urgentes 1,2,3,4,6,9,11,13,16 . Se o tempo permitir, a equipe médica deve aproveitar o uso de segmentação de imagens médicas e diagnósticos de RV para aprofundar sua compreensão do caso antes de colocar o paciente na mesa de cirurgia. Isso acabará levando a uma melhor compreensão de cada paciente único, bem como à redução do tempo de cirurgia e do tempo sob anestesia.
Divulgações
Matthew Bramlet é co-fundador da Enduvo, Inc. Os demais autores declaram não ter interesses financeiros relevantes ou materiais relacionados à pesquisa descrita neste artigo.
Agradecimentos
Estendemos um agradecimento especial ao comitê de revisão por seu feedback perspicaz e ao editorial por seus comentários inestimáveis, experiência, orientação e apoio durante todo o processo de redação deste artigo. Apreciamos muito o ambiente colaborativo promovido pelos Parceiros de Missão da OSF HealthCare System, que melhorou a qualidade deste trabalho. Agradecemos ao OSF HealthCare System por fornecer recursos e suporte e ao Advanced Imaging and Modeling Lab no Jump Simulation and Education Center por sua assistência.
Materiais
| Name | Company | Catalog Number | Comments |
| 3D Slicer | N/A | Open source segmentation software | |
| Blender | N/A | Open-source CAD software that can import and edit organic models created through segmentation | |
| Enduvo | Enduvo | N/A | A proprietary VR viewer built for education, and our VR viewer of choice |
| McKesson PACS Change Healthcare Radiology Solution | McKesson | N/A | Any Picture Archiving and Communication System should be suffiecient, McKessen is simply our PACS software solution of choice. |
| Mimics | Materialise | N/A | Segmentation software |
| Quest | Oculus | N/A | Virtual Reality Headset |
| Steam VR | Steam | N/A | Computer to headset connection software. |
| VR capable computer | See Steam VR for minimal requirements. | ||
| VR-STL-Viewer | GitHub | N/A | A open-source VR viewer capable of importing and viewing .stl and can be used, however we cannot guarantee all functionalities mentioned in this paper will be available |
Referências
- Xia, J., et al. Three-dimensional virtual reality surgical planning and simulation workbench for orthognathic surgery. Int J Adult Orthodon Orthognath Surg. 15 (4), 265-282 (2000).
- Boedecker, C., et al. Using virtual 3D-models in surgical planning: workflow of an immersive virtual reality application in liver surgery. Langenbecks Arch Surg. 406, 911-915 (2021).
- Reitinger, B., Bornik, A., Beichel, R., Schmalstieg, D. Liver surgery planning using virtual reality. IEEE Comput Graph Appl. 26 (6), 36-47 (2006).
- Robiony, M., et al. Virtual reality surgical planning for maxillofacial distraction osteogenesis: The role of Reverse Engineering Rapid Prototyping and cooperative work. J Oral Maxillofacial Surg. 65 (6), 1198-1208 (2007).
- Xia, J., et al. Three-dimensional virtual-reality surgical planning and soft-tissue prediction for orthognathic surgery. IEEE Trans Info Tech Biomed. 5 (2), 97-107 (2001).
- Kim, Y., Kim, H., Kim, Y. O. Virtual reality and augmented reality in plastic surgery: A Review. Arch Plastic Surg. 44 (3), 179-187 (2017).
- Ayoub, A., Pulijala, Y. The application of virtual reality and augmented reality in oral & maxillofacial surgery. BMC Oral Health. 19 (1), 238(2019).
- Ulbrich, M., et al. Advantages of a training course for surgical planning in virtual reality for oral and maxillofacial surgery: Crossover study. JMIR Serious Games. 11, e40541(2023).
- Lyuksemburg, V., et al. Virtual reality for preoperative planning in complex surgical oncology: A single-center experience. J Surg Res. 291, 546-556 (2023).
- Macario, A. What does one minute of operating room time cost. J Clin Anesth. 22 (4), 233-236 (2010).
- Bramlet, M., et al. Virtual reality visualization of patient specific heart model. J Cardiovasc Mag Res. 18 (1), 13(2016).
- Guillot, A., et al. Relationship between spatial abilities, mental rotation and functional anatomy learning. Adv Health Sci Edu. 12 (4), 491-507 (2006).
- Juhnke, B., et al. Use of virtual reality for pre-surgical planning in separation of conjoined twins: A case report. Proc Inst Mech Eng H. 233 (12), 1327-1332 (2019).
- Mattus, M. S., et al. Creation of patient-specific silicone cardiac models with applications in pre-surgical plans and hands-on training. J Vis Exp. (180), e62805(2022).
- Kern, M. Angiographic projections made simple: An easy guide to understanding oblique views. Cath Lab Digest. 19 (8), (2011).
- Reinschluessel, A. V., et al. Virtual reality for surgical planning - evaluation based on two liver tumor resections. Front Surg. 9, 821060(2022).
- Tang, R., et al. Augmented reality technology for preoperative planning and intraoperative navigation during Hepatobiliary Surgery: A review of current methods. Hepatobiliary Pancreat Dis Int. 17 (2), 101-112 (2018).
- Manzie, T., et al. Virtual reality digital surgical planning for jaw reconstruction: A usability study. ANZ J Surg. 93 (5), 1341-1347 (2023).
- Corren, Y. B., et al. CT-based Simulation of Projection Angiography Using the SlicerHeart Virtual Cath Lab [Poster Presentation]. World Congress of Pediatric Cardiology and Cardiac Surgery. , (2023).
Reimpressões e Permissões
Solicitar permissão para reutilizar o texto ou figuras deste artigo JoVE
Solicitar PermissãoThis article has been published
Video Coming Soon
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados